Embed Size (px)
Citation preview

1
Communication graphique
Partie II. La projection centrale1. La projection centrale sur le plan2. La perspective centrale sur le plan
Partie III. Géométrie numérique1. Les applications affines2. Les coordonnées homogènes
Plan du cours

2
Communication graphique
Géométrie numérique
Représentation numérique des points, vecteurs Opérations élémentaires
Translations Rotations Mises à l'échelle Cisaillements
Traitement numérique des axonométries

3
Communication graphique
P=[123] ; t=[
456 ]
Transformations affines
ℝ3
Points et vecteurs
Les points sont des éléments de l’espace euclidien tridimensionnel E3
E3 s’appelle l’espace affine, un point définit une position, point milieu d’une droite, centre de gravité de l’objetLes vecteurs sont des éléments de l’espace vectoriel
La convention utilisée dans la suite est celle des vecteurs colonne!

4
Communication graphique
Pour tout couple de points P, Q, il existe un vecteur unique tqui pointe de Q vers P, il est calculé par leur soustraction composante par composante
t=P−Q
P ,Q∈E3 ; t∈ℝ3
Vecteurs
P
t
Q
O

5
Communication graphique
Par ailleurs pour un vecteur donné t , il existe une infinité de paires de points telles que t = P - Q
Si u est un vecteur arbitraire,
P + u, Q + u
est une autre paire de points qui satisfait la relation.
Vecteurs
P
t
Q
O

6
Communication graphique
les vecteurs sont invariants par rapport aux translations tandis que les points ne le sont pas
Vecteurs et Points
P
t
Q
O
O'

7
Communication graphique
Combinaison barycentrique souvent appelée combinaison affine
c’est aussi une somme d’un point et de vecteurs
La combinaison convexe est une combinaison barycentrique où tous les coefficients ai sont non négatifs, leur somme restant égale à 1
La combinaison convexe de points est toujours à « l’intérieur » de l'ensemble des points, ce qui conduit à la définition de l’enveloppe convexe d’un ensemble de points...
X=∑i=0
n
i P i X ,P i∈E3 ,0⋯n=1
X=P0∑i=1
n
i P i−P0
Combinaison barycentrique

8
Communication graphique
L’enveloppe convexe est le plus petit polygone convexe incluant tous les points
Tout segment de droite qui relie 2 points de cet ensemble est entièrement situé à l’intérieur de l’ensemble
Lieu des combinaisons convexes

9
Communication graphique
Pour définir un point à partir d'autres points:
Pour définir un vecteur à partir de points :
u=∑i=0
n
i P i 0⋯n=0
X=∑i=0
n
i P i 0⋯n=1
On a invariance par rapport à la translation...

10
Communication graphique
Une transformation f est affine si elle laisse invariantes les combinaisons affines :
De manière concrète cela signifie par exemple, que le point milieu d’un segment de droite a son image au milieu de l’image du segment de droite...
X=∑i=0
n
i P i ; X ,P i∈E3 ,0⋯n=1
X =∑0
n
iP i
X : X ∈E3E3

11
Communication graphique
Transformation affine sous forme matricielle:
P ≡A⋅Pu , u∈ℝ3
∑0
n
i P i =A⋅∑0
n
i P i u
=∑ A⋅i P i∑ iu
=∑ i A⋅P iu
=∑ iP i

12
Communication graphique
identité : u = 0, A = I , I est la matrice identité,
translation :u est le vecteur de translation, A = I,
mise à échelle u = 0, A est une matrice diagonale dont les termes définissent les échelles selon les axes,
rotation : u = 0, A est une matrice de rotation,
Quelques transformations affines
u=0 ; A=[cos −sin 0sin cos 0
0 0 1]
u=0 ; A=[a 0 00 b 00 0 c ]
u=[abc ] ; A=[
1 0 00 1 00 0 1 ]
u=0 ; A=[1 0 00 1 00 0 1 ]

13
Communication graphique
Cas particulier important :
Si la matrice A est orthogonale : AT A = A-1 A=I
alors cette transformation conserve les angles et les longueurs.
Exemple : Translation, Rotation
N.B.: Toutes les transformations affinesconservent les rapports de sections, mais pas forcément les longueurs et les angles.
Mouvement de corps rigide

14
Communication graphique
Une transformation affine de E2 vers E2 est univoquement définie par un triangle non dégénéré et son image.
Dans E3 , la transformation affine est univoquement définie par un tétraèdre non dégénéré et son image.
(6 paramètres)
(12 paramètres)
Une autre définition...

15
Communication graphique
Toute transformation affine peut être décomposée en
translations, mises à échelle, rotations et cisaillements
2D : 2 2 1 13D : 3 3 3 3
Décomposition d'une transformation affine
12
3
4

16
Communication graphique
Translation
P1 = P0 + t
Transformations en 2 dimensions
P0=[ x0
y0] P1=[ x1
y1]
t=[uv ]
t
yy1
y1
y0
v
x0
x1
x
P0(1,2)
P1(5,8)
u
[ x1
y1]=[ x0
y0]+[uv ]

17
Communication graphique
Translation d’un objet : effectuer l’opération sur tous les sommets des polygones qui le définissent
Translation
x
y
(19,9)
(11,4)
x
y
(16,7)
(8,2)

18
Communication graphique
La mise à l'échelle s’effectue par rapport à l’origine.
x1= x0 py1= y0 q
P1 = S P0
Mise à l'échelle
[ x1
y1]=[ p 0
0 q ]⋅[ x0
y0]
y
x
P1(3,2)
P0(6,6)

19
Communication graphique
Mise à échelle d’un objet : effectuer l’opération sur tous les sommets des polygones qui le définissent.Résultat : changement de taille, de proportions et de position
Mise à l'échelle
y
x
(4,3)(6,3)
y
x(2,1) (3,1)

20
Communication graphique
La rotation s’effectue par rapport à l’origine
P1 = R P0
Rotation
x1=x0 cos− y0 siny1=x0 sin y0 cos
[ x1
y1]=[cos −sin
sin cos ]⋅[ x0
y0]
y
x
P1(~4.7,~3.9)
P0(6,1)
q =30°

21
Communication graphique
Rotation d’un objet : effectuer l’opération sur tous les sommets des polygones qui le définissent.Résultat : changement d’orientation et de position
Rotation
y
x
(3,2) (5,2)
y
x
(0.707,3.54)
(2.12,4.95)

22
Communication graphique
Cisaillement
y
x
1
P0(1,1) P
1(1+a,1)
g
a
a = tan g

23
Communication graphique
Pour la valeur y0 = 1, le point est simplement translaté de la valeur a.
Cette opération fait glisser les abscisses d’une valeur égale au produit de a par la distance à l’axe des x. La variable a est la tangente de l’angle g de glissement
Cisaillement
[ x1
y1]=[1 a
0 1 ]⋅[ x0
y0]=C⋅P 0
x1=x0a y0
y1= y0
a=tan

24
Communication graphique
Traitement additif de la translation
Le traitement n’est pas le même pour toutes les opérations...
Traitement matriciel
P1=S⋅P0
P1=R⋅P0
P1=C⋅P0
P1=tP 0
Traitement multiplicatif

25
Communication graphique
x
z = cste
y
z
Au lieu de situer les objets dans un espace à 2 dimensions, plaçons les dans un espace à 3 dimensions.Toutes les opérations sont inchangées si on met les points dans le plan x - y ou dans un plan parallèle, z = constante
Autre représentation

26
Communication graphique
Ce changement implique seulement d’ajouter aux points une coordonnée qui ne sera pas modifiée et qui est celle du plan dans lequel nous allons désormais effectuer les opérations
Les matrices de transformations ont une dimension (3 x 3), la dernière ligne étant constituées de zéros à l’exception du terme diagonal qui vaut 1.
Cela signifie qu’on ne modifie jamais cette coordonnée z = cste
Autre représentation

27
Communication graphique
Soit un cisaillement parallèle aux plans z = cste :
Le point glisse dans un plan perpendiculaire à z d’une quantité proportionnelle à cette coordonnée et, aux termes u ou v.
Les points du plan z = 1 subissent une translation ( u, v, 0 ).
Cette nouvelle formulation peut donc remplacer l’ancienne.
Elle correspond à un cisaillement du plan z = 1.
Nouvelle représentation de la translation
[1 0 u0 1 v0 0 1]⋅[
xyz ]=[
xuzyvz
z ]

28
Communication graphique
Avec la nouvelle formulation, l’équation de translation s’écrit :
L'opération de translation est additive : si le point P0 est déplacé de (u1,v1) en P1 et ensuite, de (u2,v2) en P2, c'est comme s'il subissait une translation totale de (u1+u2 , v1+v2)
P1=D t ⋅P0 ; t=[uv0 ] D t =[
1 0 u0 1 v0 0 1 ]
Nouvelle représentation de la translation
[x1
y1
1 ]=[1 0 u0 1 v0 0 1 ]⋅[
x0
y0
1 ]

29
Communication graphique
Mise à échelle S(p,q)
Rotation R(q)
Cisaillement C(a)
Autres transformations
[x1
y1
1 ]=[p 0 00 q 00 0 1]⋅[
x0
y0
1 ][x1
y1
1 ]=[cos −sin 0sin cos 0
0 0 1 ]⋅[x0
y0
1 ]
[x1
y1
1 ]=[1 a 00 1 00 0 1]⋅[
x0
y0
1 ]

30
Communication graphique
Le but des développements qui suivent est de montrer comment une combinaison des opérateurs fondamentaux D, S, R et Cpermet d'obtenir le résultat souhaité.
La raison pour laquelle on combine les transformations est qu'il est plus efficace d'appliquer une transformation composée unique à un grand nombre de points que de leur appliquer une série de transformations successives.
Composition de transformations
La composition se fait par simple multiplication matricielle

31
Communication graphique
Considérons la rotation d'un objet autour d'un point arbitraire A.
– Translation pour amener A à l'origine;
– Rotation autour de l'origine;
– Translation pour que le point à l'origine retourne en A.
Rotation autour d'un point arbitraire
A
A
q

32
Communication graphique
Rotation par rapport au point A différent de l’origine
Rotation autour d'un point arbitraire
[x2
y2
1 ]=[cos −sin 0sin cos 0
0 0 1 ]⋅[x1
y1
1 ][x1
y1
1 ]=[1 0 −xA
0 1 − yA
0 0 1 ]⋅[x0
y0
1 ][x3
y3
1 ]=[1 0 xA
0 1 yA
0 0 1 ]⋅[x2
y2
1 ]=
[1 0 xA
0 1 yA
0 0 1 ]⋅[cos −sin 0sin cos 0
0 0 1]⋅[1 0 −xA
0 1 − yA
0 0 1 ]⋅[x0
y0
1 ]

33
Communication graphique
Rotation autour d'un point arbitraire
[1 0 x A
0 1 y A
0 0 1 ]⋅[cos −sin 0sin cos 0
0 0 1]⋅[1 0 −xA
0 1 −y A
0 0 1 ]
=[cos −sin xA1−cos yA sinsin cos y A1−cosxA sin
0 0 1 ]
Rotation par rapport au point A différent de l’origine

34
Communication graphique
Mise à l'échelle par rapport au point A différent de l’origine
=[p 0 xA1− p0 q yA1−q0 0 1 ]
Mise à l'échelle autour d'un point arbitraire
[1 0 x A
0 1 y A
0 0 1 ]⋅[p 0 00 q 00 0 1 ]⋅[
1 0 −x A
0 1 −y A
0 0 1 ]

35
Communication graphique
Les symétries orthogonales d'axes O-x ou O-y s'écrivent respectivement
S(1,-1) et S(-1,1)
et la symétrie centrale de centre O,
S(-1,-1).
Symétries
[1 0 00 −1 00 0 1] et [
−1 0 00 1 00 0 1]
[−1 0 00 −1 00 0 1]

36
Communication graphique
(non) Commutativité
En général si l'on a deux matrices de transformation M1 et M
2
: appliquer M1 puis M
2 est différent d'appliquer M
2 puis M
1
C'est à dire que l'on a en général pas commutativité...sauf dans les cas suivants :
Commutativité (M1M
2 =M
2M
1) si :
M1 M2
translation translationmise à l'échelle mise à l'échellerotation autour de Oz rotation autour de Oz
mise à l'échelle (p=q) rotation autour de Oz

37
Communication graphique
La situation initiale ainsi que la situation finale de l'objet sont définies; cette combinaison est appelée combinaison globale.
Positionnement d'un objet
D xB , yB⋅R ⋅S p ,q⋅D −xA ,− y A
x
y
A
x
y
x
y
x
y
x
y
B
Position originale Après translation Mise à l'échelle
Après rotation translation vers la position finale B

38
Communication graphique
De manière générale, le positionnement d'un objet P0 de la position initiale "0" vers la position "n" après n transformations s'écrit :
La séquence d'opérations est définie en effectuant les transformations nécessaires tout en ne faisant appel qu'aux 4 opérations de base connues : translation, rotation autour de l'origine, mise à échelle par rapport à l'origine et cisaillement par rapport à l’origine
Les multiplications étant toujours réalisées à gauche et dans l'ordre inverse
P n=Gn⋅P0=Tn⋅Gn−1⋅P 0=Tn⋯T1⋅P 0
Positionnement d'un objet

39
Communication graphique
« Pilotage » d'un objet
G3
G4
x
y
a
b
c
0 1
2
3
4
5

40
Communication graphique
Dans ce mouvement, examinons n’importe quelle opération courante, par exemple celle qui l’amène de la position 3 à la position 4 où le mobile doit tourner de 45° vers la droite.
Pour arriver en 3, le mobile a subi l’opération :
On écrit donc :
Il faut donc imposer :
P 3=G3⋅P 0
G3⋅R 45° ⋅G3−1
P 4=G3⋅R 45 ° ⋅G3−1⋅G3⋅P0
=G3⋅R 45 ° ⋅P 0=G4⋅P 0
G4=G3⋅R 45°

41
Communication graphique
En résumé, on a les trois mouvements suivants :
A. On veut exprimer une transformation T par rapport à l’origine :
B. Transformation par rapport au point courant
C. Transformation par rapport à un point A quelconque :
Gn=T⋅Gn−1
Gn=Gn−1⋅T
Gn=D x A , y A⋅T⋅D−xA ,− y A⋅Gn−1

42
Communication graphique
- Translation :
- Mise à échelle :
Transformations en 3D
D t =[1 0 0 u0 1 0 v0 0 1 w0 0 0 1
] ; t=[uvw ]
S p , q , r =[p 0 0 00 q 0 00 0 r 00 0 0 1
]

43
Communication graphique
- Rotation autour de l’axe x :
- Rotation autour de l’axe z :
- Rotation autour de l’axe y :
R z =[cos −sin 0 0sin cos 0 0
0 0 1 00 0 0 1
]R x =[
1 0 0 00 cos −sin 00 sin cos 00 0 0 1
]R y =[
cos 0 sin 00 1 0 0
−sin 0 cos 00 0 0 1
]
Transformations en 3D

44
Communication graphique
- Cisaillement (cas général): Ca ,b , c=[1 a b 00 1 c 00 0 1 00 0 0 1
]
Transformations en 3D

45
Communication graphique
-Projections orthogonales d’un point (x y z)
- sur un plan perpendiculaire à z : z = k(x y z) => (x y k)
- sur un plan perpendiculaire à y : y = l(x y z) => (x l z)
- sur un plan perpendiculaire à x : x = m (x y z) => (m y z)
Important de noter que tout ceci est indépendant du point (ou de l’objet).
Projections : 3D->2D (ou 1D)
Pz=[1 0 0 00 1 0 00 0 0 k0 0 0 1
]Px=[
0 0 0 m0 1 0 00 0 1 00 0 0 1
]

46
Communication graphique
Calcul des axonométries
Déterminer la matrice de transformation pour une axonométrie quelconque
On exprime les coordonnées 3D initiales et finales d'un ensemble de points
On dispose de 12 inconnues, il faut donc 4 points Le trièdre (O,x,y,z) fait l'affaire …

47
Communication graphique
0 (O)
1 (x)
2 (y)
3 (z)3D
2D ou 3D
P 0=[0 1 0 00 0 1 00 0 0 11 1 1 1
]
Calcul des axonométries
P 1=[x0 x1 x2 x3
y0 y1 y2 y3
z0 z1 z2 z3
1 1 1 1]
P 1=T⋅P0
0 1 2 3

48
Communication graphique
T=P1⋅P0−1
P 1=T⋅P0
Cette matrice permet de projeter les coordonnées dans un système d'axes quelconques
Calcul des axonométries
P 0−1=[
−1 −1 −1 11 0 0 00 1 0 00 0 1 0
] P 1=[x0 x1 x2 x3
y0 y1 y2 y3
z0 z1 z2 z3
1 1 1 1]
T=[x1− x0 x2−x0 x3−x0 x0
x1− x0 y2− y0 y3− y0 y0
z1−z0 z2−z0 z3−z0 z0
0 0 0 1]

49
Communication graphique
Isométrie
T=[√32
0 −√32
0
−12
1 −12
0
0 0 0 00 0 0 1
]

50
Communication graphique
Pour une cavalière :
T=[1 0 −3 √2
100
0 1 −3 √210
0
0 0 0 00 0 0 1
]
Cavalière
x0=0 y0=0x1=1 y1=0x2=0 y2=1
x3=−0.6 √22
y3=−0.6 √22

51
Communication graphique
Partie II. La projection centrale1. La projection centrale sur le plan2. La perspective centrale sur le plan
Partie III. Géométrie numérique1. Les applications affines2. Les coordonnées homogènes
Plan du cours

52
Communication graphique
Par le théorème de Pohlke,(1 tétraèdre et son image)si on connaît la représentationfinale, on peut calculer la matrice de transformation
Transformation affine- Conservation du parallélisme- Conservation des rapports de section- Transformation linéaires
Projections parallèles
Projectionssur le plan
Projections centralesd,S,P
1 point de fuiteα
1=90° α
2, α
3=0°
2 points de fuiteα
1=0° α
2, α
3≠90°
3 points de fuiteα
1 , α
2 , α
3 ≠ 0°
Projections parallèles
Projections orthogonales
Projections obliques
Cavalière Cabinet
Projections multivuedessin technique (3 vuees)
Projections de Monge (2 vues)
Projectionscotée (1 vue)
trimétriedimétrieisométrie
Axonométries

53
Communication graphique
Projection centrale
Utilisation des caractéristiques des coordonnées homogènes
Projectionssur le plan
Projectionscentrales
1 point de fuiteα
1=90° α
2, α
3=0°
2 points de fuiteα
1=0° α
2, α
3≠90°
3 points de fuiteα
1 , α
2 , α
3 ≠ 0°
Projections parallèles
Projections orthogonales
Projections obliques
Cavalière Cabinet
Projections multivuedessin technique (3 vuees)
Projections de Monge (2 vues)
Projectionscotée (1 vue)
trimétriedimétrieisométrie
Axonométries
t
e
d P
S
d
A
Ap

54
Communication graphique
Coordonnées homogènes
August Ferdinand Möbius (1790-1868)Immersion de l'espace euclidien à n (2 ou 3) dimensions dans l'espace projectif à n+1 (3 ou 4) dimensions.In fine, seule la projection centrale sur l'hyperplan w=1 nous intéresse : les points Q
1(ax,ay,az,a) et Q
2(bx,by,bz,b) sont
équivalents à Q(x,y,z,1), quels que soient a et b non nuls.
Le passage de (wx,wy,wz,w) à la notation normalisée (x,y,z,1) s'appelle la division perspective (ou division homogène)C'est une opération non linéaire !
Une direction (vecteur) peut être représentée par un point à l'infini (w=0)

55
Communication graphique
En projection centrale, seul élément important :distance de l’objet au centre de projection.
On peut, sans perte de généralité, choisir le plan z=1 comme tableau et
l’origine des coordonnées comme centre de projection S = O.
Principe

56
Communication graphique
R=[xzyz1]
Q
R
z
y
Oz=1
Principe (2D)
Q=[xyz ]

57
Communication graphique
Projection interprétée comme une transformation de
coordonnées homogènes de l'espace projectif à 3 dimensions en coordonnées cartésiennes de l'espace à 2 dimensions.
En effet, les coordonnées homogènes d'un point de l'espace à n dimensions, à l'exclusion de l'origine, sont obtenues en plaçant le point dans un espace à n+1 dimensions sur la droite qui le lie à l'origine des coordonnées.

58
Communication graphique
Dans l'espace à 4 dimensions, la coordonnée supplémentaire est appelée « poids », ou coordonnée homogène.
Cet espace nous a servi à traiter le problème des translations en déplaçant les coordonnées d'un point (x y z), du plan w = 0 de l’espace à 4 dimensions vers le plan w =1 du même espace.

59
Communication graphique
Réalisons une projection centrale dans l’espace à 4 dimensions, sur l'hyperplan w =1, avec pour point de vue l’origine.
Tout point de cet espace, tel que Q (x, y, z, w), est transformé en un point R tel que:
Les points du plan évanouissant w = 0 sont exclus de cette transformation. Cette projection ne change rien pour toutes les opérations vues au cours précédent... (car on se ramène à w=1)
R=[x /wy /wz /w
1]

60
Communication graphique
Point de vue
Point principal
x
Q1 (x1, y1, 0)
Q0 (x0, y0, z0)
x1
x0
=y1
y0
=d
d z0
z
y
S (0, 0, -d)
P (0, 0, 0)=O
Construction de l'opérateur de projection

61
Communication graphique
d’où :
x1=x0
1z0/d, y1=
y0
1 z0/d, z1=0
x1
x0
=y1
y0
=d
d z0
Construction de l'opérateur de projection

62
Communication graphique
xc=x0
1 z0/d, yc=
y0
1 z0/d, zc=
z0
1 z0 /d
Ces relations suggèrent de définir une transformation intermédiaire pour laquelle le point est d'abord déplacé de Q
0 vers Q
C , position telle que ses 3 coordonnées
subissent la même mise à l'échelle :
Construction de l'opérateur de projection

63
Communication graphique
Point de vue
Point principal
x
Q0 (x0, y0, z0)
z
y
Qc (xc, yc, zc) Q1 (x1, y1, 0) S (0, 0, -d)
Construction de l'opérateur de projection
P (0, 0, 0)=O

64
Communication graphique
Les 3 coordonnées cartésiennes du point :
peuvent être exprimées sous la forme de coordonnées homogènes en ajoutant une quatrième composante wC = 1 :
xc=x0
1z0/d, yc=
y0
1z0/d, z c=
z0
1z0/d
[x0
1z0/dy0
1z0/dz0
1z0/d1
]≡[x0
y0
z0
1z0/d]
Construction de l'opérateur de projection

65
Communication graphique
Construction de l'opérateur de projection
D'où la notation matricielle suivante :
[x0
y0
z0
1z0 /d]=[
1 0 0 00 1 0 00 0 1 00 0 1 /d 1
]⋅[x0
y0
z0
1]

66
Communication graphique
x , z
x , z , w=1
x , z , w=1zd
(x
1+zd
,z
1+zd
, w=1)
x
1zd
, z
1zd
x
1zd
, z=0 Q0
Q1
Q2
Q3
Qc
QI
S
O
zw
xInterprétation géométrique
x=0, z=−d
d

67
Communication graphique
Profondeur / observateur
En pratique, le point Qc est important ( autant que Q
I ),
car il contient encore une notion de profondeur par rapport à l'observateur (écran) et peut ainsi être utilisé pour l'élimination automatique des faces cachées :
- Soit par tri en profondeur des faces à afficher (technique du peintre)
- Soit par l'utilisation d'algorithmes dits de « z-buffer »

68
Communication graphique
x p=−33
25y p=4
z p=−106
25
d=485
cos=35
sin=45
Application

69
Communication graphique
Opérations
Placer le tableau t en coïncidence avec le plan x-y (plan vertical de projection)
le point principal P est translaté à l'origine O des axes.
Il faut écrire successivement
l'opérateur de translation amenant P en O, l'opérateur de rotation amenant t sur x-y, l'opérateur de perspective centrale
et enfin, l'opérateur combiné.

70
Communication graphique
Translation de P vers O
D x p , y p , z p=[1 0 0 −x p
0 1 0 − y p
0 0 1 −z p
0 0 0 1]=[
1 0 03325
0 1 0 −4
0 0 110625
0 0 0 1]

71
Communication graphique
Rotation d'un angle -a
L'opérateur de rotation amène ensuite t sur x-y, l'angle de rotation est égal à b = -a , a >0 ,
R y =[cos 0 sin 0
0 1 0 0−sin 0 cos 0
0 0 0 1]=[
35
0−45
0
0 1 0 045
035
0
0 0 0 1]

72
Communication graphique

73
Communication graphique

74
Communication graphique
L'opérateur de cisaillement peut alors être utilisé :
Cd =[1 0 0 00 1 0 00 0 1 0
0 01d
1 ]=[1 0 0 00 1 0 00 0 1 0
0 0548
1]
Opérateur de cisaillement perspectif

75
Communication graphique
Matrice de transformation « finale »
T x p , y p , z p , , d =Cd ⋅R y ⋅D x p , y p , z p
Opérateur combiné
T=[35
0−45
−135
0 1 0 −445
035
185
112
01
16118
]

76
Communication graphique
L0(−6 ,6 ,−2)→L1(−6 , 6 ,−2 ,1)
L2=T⋅L1=(−235
, 2 ,125
,34 )
L3=L2/L2[4 ]=(−9215
,83
,−165
, 1)L3(−92
15,83
,−165
,1)→Lc(−9215
,83
,−165 )→L I (−6.133 , 2.667)
Q0(−6 , 0 ,−6.5)→Qc(−3215
,−12815
,−27225 )→Q I (−2.133 ,−8.533)
N 0(−32
,92
,−8)→Nc (5815
,23
,−165 )→N I (3.867 ,−0.667)
Transformation des points

77
Communication graphique
Vecteurs en coordonnées homogènes
Les vecteurs 3D sont exprimés en coordonnées homogènes simplement en fixant w=0.
Les vecteurs ne sont pas affectés par la translation :Preuve : soit un vecteur exprimé en coordonnées homogènes. Soit D une matrice de translation :
V n'est pas modifié par la translation :
V= xv , y v , z v , 0T
D=[1 0 0 D x
0 1 0 D y
0 0 1 Dz
0 0 0 1]
V=D⋅V

78
Communication graphique
Point de fuite
Un point de fuite sur l'épure est l'image d'un point situé à l'infini dans une direction donnée. Soit A un point de l'espace, V un vecteur :
En coordonnées homogènes :
Or,
Donc :
P f=limk →∞
A+ k⋅V
P f=limk∞ [
1 0 0 k⋅xV
0 1 0 k⋅yV
0 0 1 k⋅zV
0 0 0 1]⋅[
x A
y A
z A
1]
xAk⋅xV ,⋯ ,1 ≡ xAk⋅xV
k,⋯,
1k
P f≡ xV , yV , zV ,0
= limk ∞
xAk⋅xV , yAk⋅yV , zAk⋅zV , 1

79
Communication graphique
Point de fuite
limk →∞
T⋅P f=[35
0−45
−135
0 1 0 −445
035
185
112
0116
118
]⋅[x A+ k⋅x v
y A+ k⋅yv
z A+ k⋅z v
1]=
limk →∞ [
35(x A+ k⋅xv)−
45( z A+ k⋅zv)−
135
y A+ k⋅yv−445(x A+ k⋅xv)+
35( y A+ k⋅zv)+
185
112
(x A+ k⋅x v)+1
16( y A+ k⋅zv)+
115]=[
35
k⋅x v−45
k⋅zv
k⋅yv
45
k⋅xv+35
k⋅zv
112
k⋅x v+116
k⋅zv]≡[
35
xv−45
zv
y v
45
xv+35
zv
112
xv+1
16z v]=T⋅[
xv
yv
zv
0]

80
Communication graphique
Calcul des points de fuite
Un point de fuite se calcule donc en appliquant au vecteur indiquant la direction du point de fuite désiré la transformation T .
Ensuite, comme pour un point, la division perspective est appliquée (si le w résultant est non nul). Le point obtenu correspond au point de fuite sur le dessin.
Si w est nul, le vecteur d'origine est parallèle au plan perspectif, donc le point de fuite est situé à l'infini. C'est le cas des verticales dans une vue en conditions standard.

81
Communication graphique
x p=−33
25y p=4
z p=−106
25
d=485
cos=35
sin=45
Calcul des points de fuite
Fa
Fb
Fc
Fc'
Fc'
Fn

82
Communication graphique
Calcul des points de fuite
F a=[1000] F b=[
0010] F c=[
0100]
F c '=[11−430
] F n=[450350]

83
Communication graphique
Calcul des points de fuite
F a=1 ,0 ,0 ,0T
T⋅F a=(35
,0 ,45
,112 )
T
→( 365
,0 ,485 )
T
→(5.2,0)T
,qui sont les coordonnées du point « Fa » sur le dessin.
F b=0 ,0 ,1 , 0T
T⋅F b=(−45
,0 ,35
,1
16 )T
→(−645
,0 ,485 )
T
→(−12.8,0)T
,qui sont les coordonnées du point « Fb » sur le dessin.

84
Communication graphique
Calcul des points de fuite
F c=0 , 1 ,0 ,0T
T⋅F c=(0,1 ,0 , 0)T→point de fuite inexistant
F c '=1,1 ,−43
,0T
T⋅F c '=( 53
,1 ,0 , 0)T
→point de fuite inexistant
F n= 45
,0 ,35
,0T
T⋅F n=(0 ,0 ,1 ,548 )
T
→point de fuite≡P

85
Communication graphique
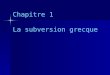
Positionnement des points obtenus
Au final,
(−6.133 , 2.667,3.2)→L (−6.133 , 2.667)
(−2.133 ,−8.533,−10.880)→Q (−2.133 ,−8.533)
(3.867 ,−0.667,−3.2)→N (3.867 ,−0.667)
(5.2,0, 9.5)T→F a(5.2,0)T
(−12.8,0,9 .5)T→F b(−12.8,0)T
On peut classer ces points par distance décroissante par rapport au plan perspectif en considérant la 3ième coordonnée :
Fa, F
b, L, N et Q

86
Communication graphique
P
yx
L(-6.13,2.67)
Q(-2.13,-8.53)
N(3.87,0.67)
Fb(-12.8,0)
Positionnement des points obtenus
Fa(5.2,0)
Fa, F
b, L, N et Q

87
Communication graphique
Examen
Durée totale : 4 heures
2 heures : théorie sur 4 sujets (docs interdits)- Éléments de dessin technique & tolérances
- Méthode de Monge
- Projection centrale
- Géométrie numérique
2 heures : exercices (docs personnels autorisés)- Construction d’une axonométrie
- Mise en perspective