Embed Size (px)
Citation preview
LOI DU MOMENT CINÉTIQUE
PlanI. Moment cinétique 2
1. Moment cinétique d’un point matériel par rapport à un point . . . . . . . . . . 2a) Définition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2b) Propriété . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
2. Moment cinétique d’un point matériel par rapport à un axe orienté . . . . . . 33. Moment cinétique d’un système de points par rapport à un axe orienté . . . . 54. Cas du solide en rotation autour d’un axe fixe . . . . . . . . . . . . . . . . . . 5
II. Moment d’une force 81. Moment d’une force par rapport à un point . . . . . . . . . . . . . . . . . . . . 82. Moment d’une force par rapport à un axe orienté . . . . . . . . . . . . . . . . 9
a) Définition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9b) Bras de levier . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
3. Moment résultant. Couple de force . . . . . . . . . . . . . . . . . . . . . . . . 13a) Moment résultant . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13b) Couple de force . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
4. Liaison pivot . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
III.Loi du moment cinétique 151. Forces intérieures - forces extérieures . . . . . . . . . . . . . . . . . . . . . . . 152. Loi du moment cinétique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153. Solide en rotation autour d’un axe fixe : loi scalaire du moment cinétique . . . 164. Retour sur la liaison pivot . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
IV.Pendule pesant 181. Description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 182. Équation du mouvement . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 183. Intégrale première . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 204. Portrait de phase . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
V. Pendule de torsion 211. Couple de torsion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 212. Équation du mouvement . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 213. Intégrale première du mouvement . . . . . . . . . . . . . . . . . . . . . . . . . 22
VI.Approche énergétique du solide en rotation 231. Énergie cinétique d’un solide en rotation autour d’un axe fixe . . . . . . . . . . 232. Puissance d’une force s’exerçant sur un point d’un solide en rotation . . . . . . 233. Théorème de l’énergie cinétique pour un solide en rotation . . . . . . . . . . . 244. Action mécaniques conservatives - Énergie potentielle . . . . . . . . . . . . . . 255. Énergie mécanique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
1

VII.Bilan énergétique pour un système déformable 281. Première constatation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 282. Travail des forces intérieures . . . . . . . . . . . . . . . . . . . . . . . . . . . . 283. Théorème de l’énergie cinétique pour un système déformable . . . . . . . . . . 294. Exemple : bilan énergétique du tabouret d’inertie . . . . . . . . . . . . . . . . 29
2

Quand on tourne le volant d’une voiture, on exerce deux forces opposées en deux points dia-métralement opposés. D’après la loi de la quantité de mouvement on vérifie que le centre demasse du système ne se déplace pas. Pourtant, le fait d’exercer ce "couple" de force permet demettre en mouvement le volant. Le mouvement va donc être décrit par une nouvelle loi, bienadaptée à l’étude des mouvements de rotation : la loi du moment cinétique.
I. Moment cinétique
1. Moment cinétique d’un point matériel par rapport à un point
a) Définition
Soit M un point matériel se déplaçant à la vitesse ~v dans un référentiel R. Soit A un pointquelconque. On définit ~σA(M)/R le moment cinétique du point M en A par rapport au réfé-rentiel R
~σA(M)/R =−−→AM ∧ ~p(M)/R =
−−→AM ∧m~v(M)/R
b) Propriété
~σB(M)/R =−−→BM ∧ ~p(M)/R
= (−→BA+
−−→AM) ∧ ~p(M)/R
=−→BA ∧ ~p(M)R + ~σA(M)/R
~σB(M)/R = ~σA(M)/R +−→BA ∧ ~p(M)R
Dimensionnellement [‖~σ‖] = M.L2.T−1 ( kg.m2.s−1 en unité SI). On peut remarquer que cesdimensions sont les mêmes que celles de la constante de Planck h 1.
Autre écriture courante : le moment cinétique ~σA(M)/R est fréquemment noté ~LA(M)/R .
Pour alléger l’écriture on ne précisera plus par la suite le référentiel d’étude R dans la notation.
1. p = hλ , avec λ la longueur d’onde de de Broglie
3

2. Moment cinétique d’un point matériel par rapport à un axe orien-té
Soit un axe ∆.
Soit O un point quelconque de ∆.
Soit ~u∆ un vecteur unitaire colinéaire à l’axe ∆. Lesens de ~u∆ définit l’orientation de l’axe ∆.
On définit σ∆(M) le moment cinétique de M par rap-port à l’axe orienté ∆, dans un référentiel R donnépar
σ∆(M) = ~σO(M).~u∆
Quelques remarques :
. Le signe de σ∆ dépend du sens d’orientation choisi.
. La définition est indépendante de la position du point O choisi sur l’axe.Soit O′ ∈ ∆ tel que ~OO′ 6= ~0.D’après la propriété établie précédemment ~σO′(M) = ~σO(M) +
−−→O′O ∧ ~p(M), d’où
~σO′(M).~u∆ = ~σO(M).~u∆ + (−−→O′O ∧ ~p(M)).~u∆︸ ︷︷ ︸
=0 car−−→O′O‖~u∆
= ~σO(M).~u∆ = σ∆
. Seule la composante orthoradiale vθ de la vitesse contribue au moment cinétique par rapportà l’axe.Plaçons nous en coordonnées cylindriques : l’axe Oz est confondu avec l’axe ∆, ~uz = ~u∆.{ −−→
OM = r~ur + z~uz~v = r~ur + rθ~uθ + z~uz = vr~ur + vθ~uθ + vz~uz
−−→OM ∧m~v = m
∣∣∣∣∣∣r0z∧
∣∣∣∣∣∣vrvθvz
= m
∣∣∣∣∣∣−z vθz vr − rvzr vθ
ainsi par projection σ∆ = ~σO(M).~u∆ = ~σO(M).~uz = mr vθ = rpθ = mr2θ avec pθ = ~p.~uθcomposante orthoradiale de la quantité de mouvement.
σ∆ = r pθ = rmvθ = mr2θ
4
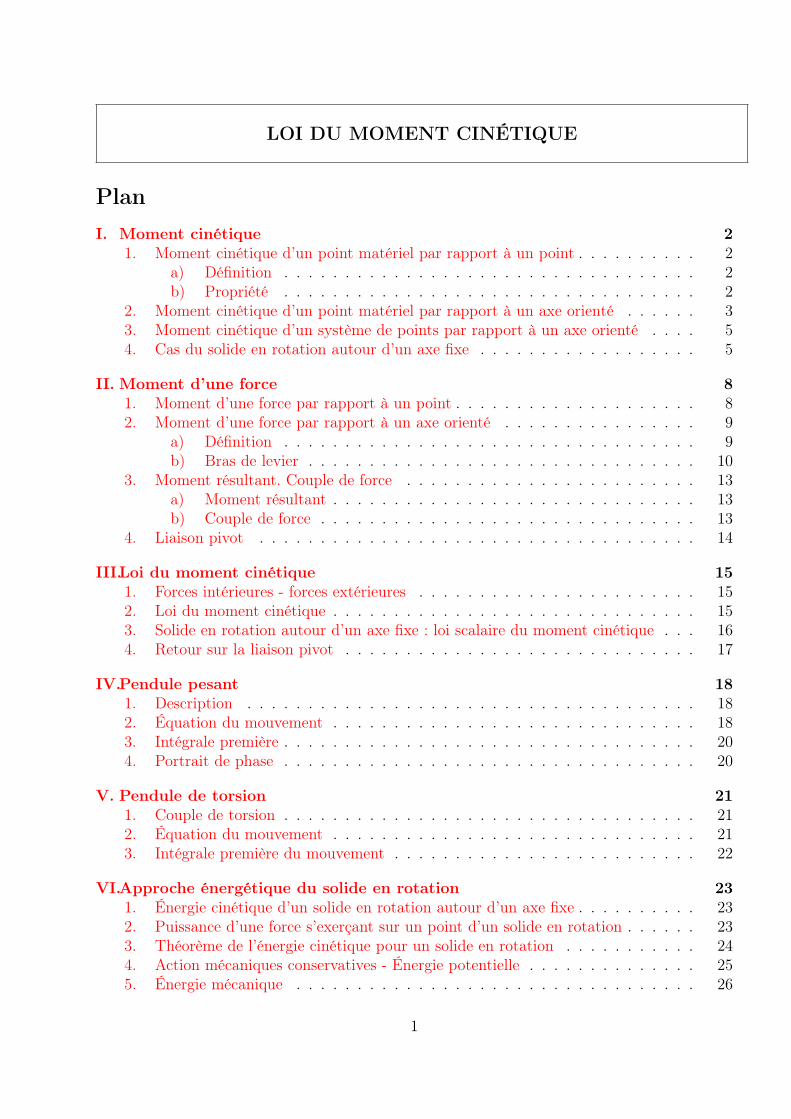
On a tracé sur les figures ci-dessous uniquement la composante orthoradiale de la vitesse
Pour θ > 0, vθ = rθ > 0, le point M tourne autour de l’axe ∆ dans le sens direct σ∆ > 0.
Pour θ < 0, vθ = rθ < 0, le point M tourne autour de l’axe ∆ dans le sens indirect σ∆ < 0.
Le sens direct (sens positif) est lié à l’orientation de l’axe ∆ par la règle du tire-bouchon.
Le moment cinétique sera nul si vθ = 0. Dans ce cas le vecteur vitesse ~v est contenu dans leplan défini par M et l’axe ∆.
5

3. Moment cinétique d’un système de points par rapport à un axeorienté
On considère un système S de points matérielsMi de masse de mi avec i = 1 . . . n. Le momentcinétique en O du système, par rapport à un référentiel R donné est la somme des momentscinétiques de chacun des points.
~σO =n∑i=1
~σO(Mi) =n∑i=1
−−→OMi ∧mi~v(Mi)
Par projection, le moment cinétique du système S par rapport à un axe ∆ orienté sera
σ∆ = ~σO.~u∆ =n∑i=1
~σO(Mi).~u∆ =n∑i=1
σ∆(Mi)
En se plaçant en coordonnées cylindriques de telle sorte que l’axe ∆ soit confondu avec Oz, onaura :
σ∆ =n∑i=1
mi r2i θi
où ri représente la distance du point Mi à l’axe ∆.
4. Cas du solide en rotation autour d’un axe fixe
On considère un solide Σ en rotation à lavitesse angulaire ω = θ dans le sens directautour d’un axe ∆ fixe dans le référentield’étude R. Chaque point de Σ décrit dans Rune trajectoire circulaire d’axe ∆ à la mêmevitesse angulaire ω.
∀i θi = θ = ω
D’après le résultat précédent, si on décompose le solide en un grand nombre de points, le
moment cinétique de Σ par rapport à l’axe ∆ vaudra σ∆ =
(∑i
mi r2i
)θ =
(∑i
mi r2i
)ω.
En réalité, chaque "point" correspond à un volume élémentaire de masse dm et la sommationn’est pas discrète mais continue, ce qui revient à poser une intégrale.
J∆ =
[∫∫∫Σ
dmr2
]ω =
[∫∫∫Σ
ρ dV r2
]ω
6

Le moment cinétique par rapport à l’axe ∆ est donc proportionnel à la vitesse angulaire derotation du solide autour de l’axe. On exprimera σ∆ sous la forme
σ∆ = J∆ω avec J∆ =
(∑i
mi r2i
)
J∆ est appelé moment d’inertie du solide par rapport à l’axe ∆.Dimensionnellement [J∆] = M.L2 (kg.m2 en unité SI).Le moment d’inertie dépend de la répartition spatiale de la masse autour de l’axede rotation.
Exemples :
• Système de masse m, constitué de deux points matériels de masses m2rigidement liés par une
tige de masse négligeable :
J∆ = 2× m
2
(`
2
)2
= m`2
4
• Tige de masse m, homogène, de longueur ` en rotation autour d’un axe ∆ perpendiculairepassant par son milieu :
J∆ = m`2
12
Dans ce deuxième cas, la même masse m est répartie uniformément sur toute la longueur de latige : le moment d’inertie est plus faible que celui trouvé dans le premier cas où la toute massem se trouvait aux points les plus éloignés de l’axe ∆.
De manière générale plus la masse est répartie loin de l’axe, plus le moment d’iner-tie augmente (exemple : suivant que l’on place les bras perpendiculairement au corps ou lelong du corps, on modifie son moment d’inertie par rapport à un axe vertical passant par G,voir cas du patineur).
• Tige de masse m, homogène, de longueur ` en rotation autour d’un axe ∆ perpendiculairepassant par une de ses extrémités :
Tige homogène de masse masse m, de longueur `
J∆ = m`2
3
Si toute la masse m était concentrée à l’autre extrémité de la tige, le moment d’inertie vaudraitJ∆ = m`2. Il est donc normal ici de trouver une valeur inférieure.
Justification :On découpe la tige en petits éléments, de longueur dr, de masse dm = m
`dr car la tige est
homogène. Chaque élément de longueur possède un moment d’inertie dmr2. On additionne
7
ensuite tous ces moments d’inertie en posant l’intégrale :
J∆ =
∫ `
0
dmr2 =
∫ `
0
m
`dr r2 =
m
`
∫ `
0
r2dr =m
`
`3
3= m
`2
3
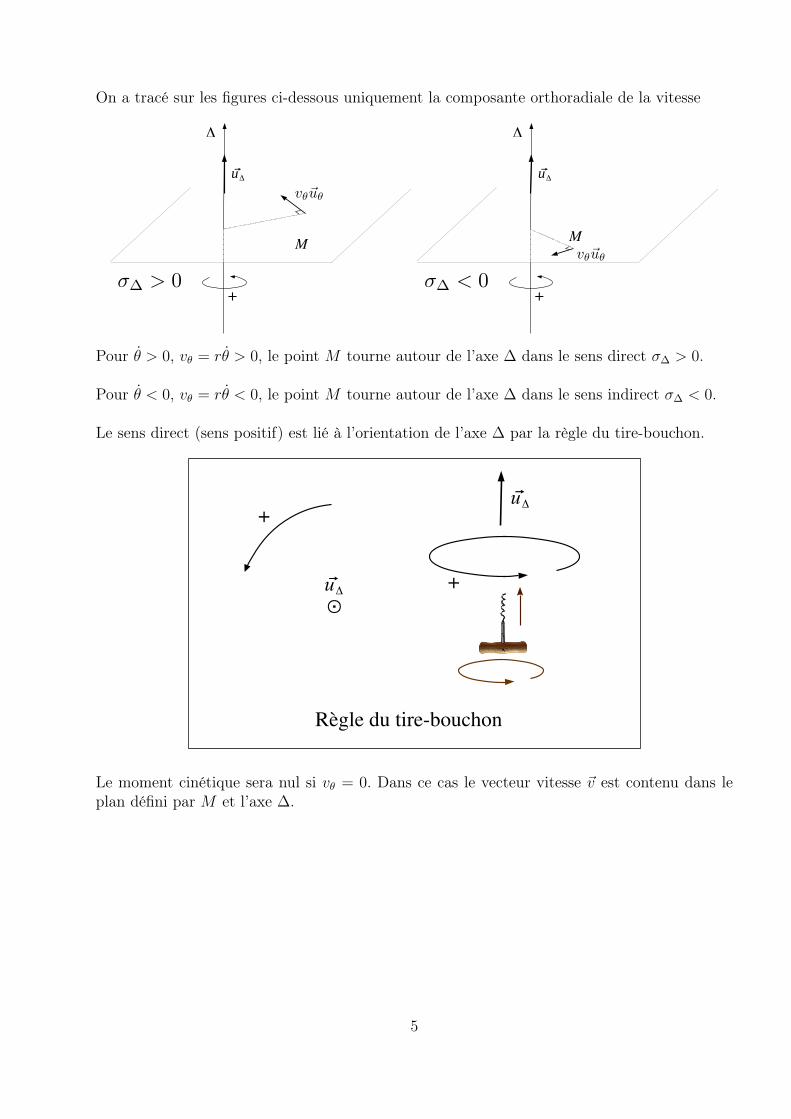
Moment d’inertie de solides homogènes autour de leur axe de symétrie
• Cylindre creux homogène de rayon R de masse totale m :
J∆ = mR2
• Cylindre plein homogène de rayon R de masse totale m :
J∆ =1
2mR2
• Sphère pleine de rayon R de masse m :
J∆ =2
5mR2
8

II. Moment d’une force
1. Moment d’une force par rapport à un point
Soit M le point d’application d’une force ~F .
Soit O un point quelconque.
On définit ~MO(~F ) le moment en O de la force ~F par
~MO(~F ) =−−→OM ∧ ~F
Dimensionnellement ‖ ~MO(~F )‖ est homogène à une force multipliée par une longueur. Celacorrespond également aux dimensions d’une énergie mais en unité SI, le moment d’une forces’exprime généralement en N.m.
Le moment en O de la force sera nul si– la force s’applique au point O lui-même (M = O)– ~F est colinéaire à
−−→OM : la droite définie par M et ~F passe par O (force centrale).
Propriété :
~MO′(~F ) =−−→O′M ∧ ~F
= (−−→O′O +
−−→OM) ∧ ~F
=−−→O′O ∧ ~F + ~MO(~F )
~MO′(~F ) = ~MO(~F ) +−−→O′O ∧ ~F
9

2. Moment d’une force par rapport à un axe orienté
a) Définition
Soit un axe ∆.
Soit O un point quelconque de ∆.
Soit ~u∆ un vecteur unitaire colinéaire à l’axe∆. Le sens de ~u∆ définit l’orientation del’axe ∆.
On définit M∆(~F ) le moment de la force ~F s’exer-çant en M par rapport à l’axe orienté ∆ par
M∆(~F ) = ~MO(~F ).~u∆
. Le signe de M∆ dépend du sens d’orientation choisi.
. On peut vérifier que, de la même manière que pour le moment cinétique par rapport à unaxe, la définition de M∆ est indépendante de la position du point O choisi sur l’axe.Soit O′ ∈ ∆ tel que ~OO′ 6= ~0.D’après la propriété établie précédemment ~MO′(~F ) = ~MO(~F ) +
−−→O′O ∧ ~F , d’où
~MO′(~F ).~u∆ = ~MO(~F ).~u∆ + (−−→O′O ∧ ~F ).~u∆︸ ︷︷ ︸=0 car
−−→O′O‖~u∆
= ~MO(~F ).~u∆ = M∆(~F )
. Par analogie avec le calcul du moment cinétique par rapport à un axe, on peut affirmer queseule la composante orthoradiale de la force contribue au moment par rapport à l’axe ∆.On note ~F = Fr~ur + Fθ~uθ + Fz~uz.
On avait σ∆ = mrvθ = rpθ avec pθ la composante orthoradiale de ~p. On aura M∆(~F ) = rFθ .
On peut bien sûr refaire le calcul.Plaçons nous en coordonnées cylindriques : l’axe Oz est confondu avec l’axe ∆, ~uz = ~u∆.{ −−→
OM = r~ur + z~uz~F = Fr~ur + Fθ~uθ + Fz~uz
−−→OM ∧ ~F =
∣∣∣∣∣∣r0z∧
∣∣∣∣∣∣FrFθFz
=
∣∣∣∣∣∣−z Fθz Fr − rFzr Fθ
ainsi par projection ~M∆ = ~MO(~F ).~u∆ = ~MO(~F ).~uz = r Fθ
Il existe une méthode alternative pour calculer le moment d’une force par rapport à un axe.Plutôt que de projeter cette force sur ~uθ pour calculer ensuite rFθ on utilise plutôt le "brasde levier".
10
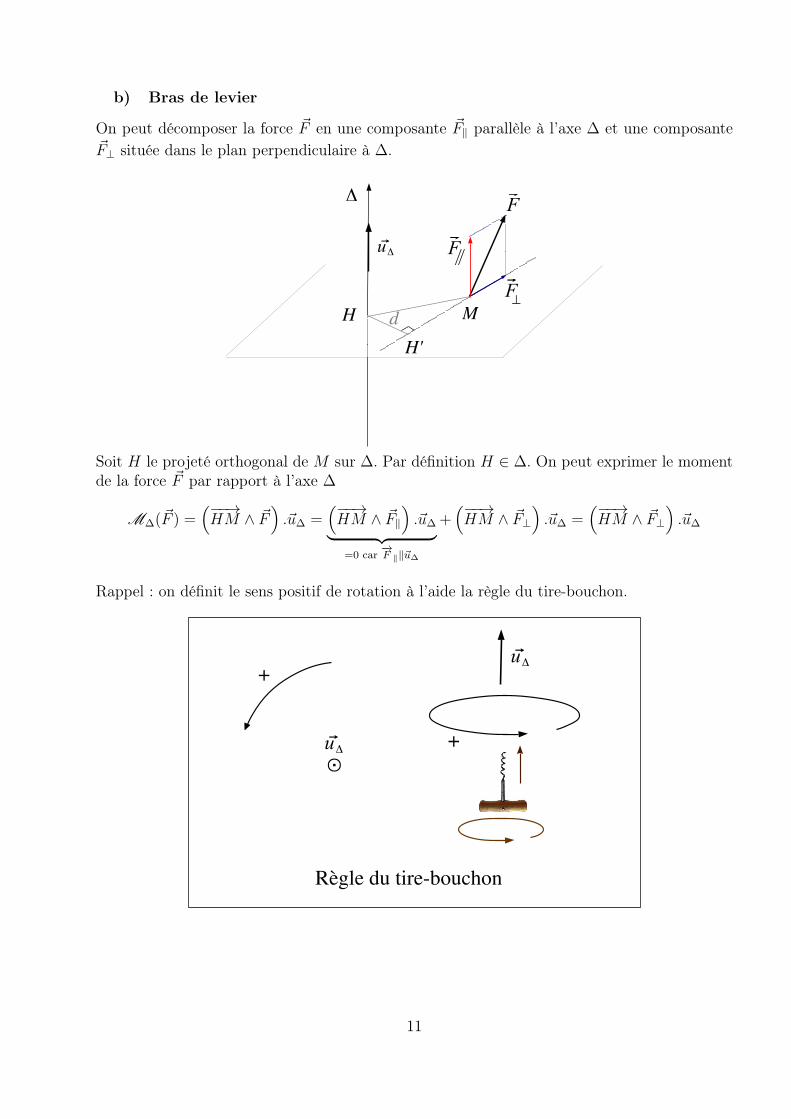
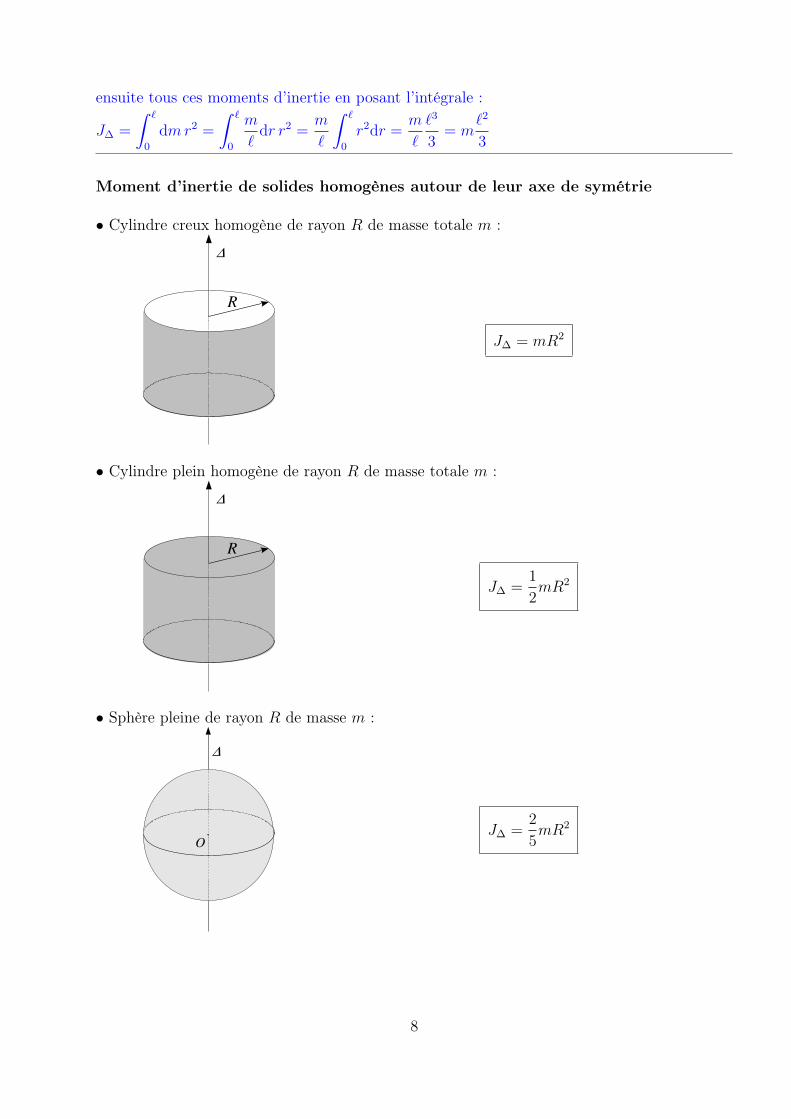
b) Bras de levier
On peut décomposer la force ~F en une composante ~F‖ parallèle à l’axe ∆ et une composante~F⊥ située dans le plan perpendiculaire à ∆.
Soit H le projeté orthogonal de M sur ∆. Par définition H ∈ ∆. On peut exprimer le momentde la force ~F par rapport à l’axe ∆
M∆(~F ) =(−−→HM ∧ ~F
).~u∆ =
(−−→HM ∧ ~F‖
).~u∆︸ ︷︷ ︸
=0 car−→F ‖‖~u∆
+(−−→HM ∧ ~F⊥
).~u∆ =
(−−→HM ∧ ~F⊥
).~u∆
Rappel : on définit le sens positif de rotation à l’aide la règle du tire-bouchon.
11

1er cas : ~F tend à faire tourner M dans le sens positif
−−→HM ∧ ~F⊥ = (
−−→HH ′ +
−−−→H ′M) ∧ ~F⊥
=−−→HH ′ ∧ ~F⊥ +
−−−→H ′M ∧ ~F⊥︸ ︷︷ ︸
=~0 car−−−→H′M‖~F⊥
=−−→HH ′ ∧ ~F⊥
= d‖~F⊥‖ ~u∆
M∆(~F ) = +d‖~F⊥‖ > 0
2eme cas : ~F tend à faire tourner M dans le sens négatif
−−→HM ∧ ~F⊥ = (
−−→HH ′ +
−−−→H ′M) ∧ ~F⊥
=−−→HH ′ ∧ ~F⊥ +
−−−→H ′M ∧ ~F⊥︸ ︷︷ ︸
=~0 car−−−→H′M‖~F⊥
=−−→HH ′ ∧ ~F⊥
= −d‖~F⊥‖~u∆
M∆(~F ) = −d‖~F⊥‖ < 0
Bilan :
Soit ∆ un axe orienté et ~F une force. Soit ~F⊥ la composante de ~F orthogonale à ∆.Le moment de la force ~F par rapport à l’axe ∆ s’exprime sous la forme :
M∆(~F ) =
{+d‖~F⊥‖ si ~F tend à faire tourner autour de ∆ dans le sens positif−d‖~F⊥‖ si ~F tend à faire tourner autour de ∆ dans le sens négatif
le sens positif étant relié à l’orientation de l’axe ∆ par la règle du tire-bouchon.La distance d = HH ′ est appelée bras de levier.
12

Remarque :Reprenons le premier cas ( ~F tend à faire tourner M dans le sens direct, dans ce cas sacomposante orthoradiale Fθ est positive).
~F⊥ = Fr~ur + Fθ~uθ
M∆(~F ) = d‖~F⊥‖ = r sinα‖~F⊥‖
or ‖~F⊥‖ sinα = Fθ, on retrouve bien
M∆(~F ) = rFθ
On peut reprendre le même raisonnement pour Fθ < 0.
En général, on utilise plutôt la formule du bras de levier pour calculer M∆.
Illustrations :– Forces exercées sur une porte. Moment par rapport à l’axe de rotation de la porte dansdifférents cas.– Principe du levier
13

3. Moment résultant. Couple de force
a) Moment résultant
On considère un système soumis à n forces ~Fi, i = 1 · · ·n s’appliquant respectivement auxpoints Mi. Le moment résultant en O sera :
~M0 =n∑i=1
~MO(~Fi) =n∑i=1
−−→OMi ∧ ~Fi
Le moment résultant par rapport à un axe orienté ∆ vaudra
M∆ =n∑i=1
M∆(~Fi)
b) Couple de force
On nomme couple un système de forces dont la résultante est nulle mais dontle moment résultant en un point O quelconque est non nul.
On peut vérifier sur un exemple que le moment d’un couple est indépendant du point où on lecalcule.Soient ~F1 et ~F2, deux forces s’appliquant respectivement en deux points M1 et M2 et telles que~F1 + ~F2 = ~0.Supposons qu’il existe un point O où le moment résultant, noté ~Γ0, est non nul :
~Γ0 =−−−→OM1 ∧ ~F1 +
−−−→OM2 ∧ ~F2
Soit O′ un point quelconque :
~Γ0′ =−−−→O′M1 ∧ ~F1 +
−−−→O′M2 ∧ ~F2 = (
−−→O′O +
−−−→OM1) ∧ ~F1 + (
−−→O′O +
−−−→OM2) ∧ ~F2
=−−→O′O ∧ (~F1 + ~F2)︸ ︷︷ ︸
=~0
+−−−→OM1 ∧ ~F1 +
−−−→OM2 ∧ ~F2 = ~Γ0
La démonstration peut se généraliser à tout système de force de résultante nulle.
Le moment résultant d’un couple est indépendant du point considéré. On lenotera donc simplement ~Γ.
14

Exemple :– Rotation d’un volant automobile
– Action d’un champ électrique sur une molécule polaire
4. Liaison pivot
Une liaison pivot est un dispositif mécanique permettant la rotation d’un objetautour d’un axe fixe, tout en empêchant la translation suivant cet axe.
Exemple : charnière de porte de placardsur un vélo : beaucoup de liaisons pivot au niveau des roues, du pédalier etdes pédales, du guidon...
Au niveau d’une liaison pivot, les actions mécaniques peuvent être modélisées par un couple(couple moteur, couple résistant, cf chapitre suivant).
15

III. Loi du moment cinétique
1. Forces intérieures - forces extérieuresOn considère un système S de n pointsMi i = 1 · · ·n.Chaque point Mi subit des forces de résultante ~fi quise décompose en
~fi = ~f inti + ~f ext
i
avec ~f inti la résultante des forces intérieures qu’exercent
les autres points du système sur Mi (~f inti =
∑j 6=i
~fj→i)
et ~f exti la résultante des forces qu’exerce l’extérieur du
système sur Mi.
2. Loi du moment cinétique
On considère un système S (point matériel, système de points, solide) de masse totale mfixée (système fermé).On considère un point O fixe dans R galiléen.Soit ~σO/R le moment cinétique de S en O par rapport au référentiel R. On a(
d~σO/Rdt
)R
= ~M extO
avec ~M extO moment résultant en O des forces extérieures au système.
Seul le moment des forces extérieures peut contribuer à la rotation d’un système.
Si ~M extO = ~0 alors le moment cinétique est conservé : le moment cinétique d’un système
isolé se conserve.
Si un système est à l’équilibre, son moment cinétique est nul et donc ~M extO = ~0.
Remarque :On a montré que on peut déduire de la loi de la quantité de mouvement que la résultante desforces intérieures à un système est nulle.On peut déduire de la loi du moment cinétique que le moment résultant des forces intérieuresest nul.Prenons l’exemple d’un système de deux points M1 et M2 qui subissent respectivement lesforces :
~f1 = ~f2→1 + ~f ext1
~f2 = ~f1→2 + ~f ext2
Appliquons la loi du moment cinétique au système M1
d~σO(M1)
dt=−−−→OM1 ∧ (~f2→1 + ~f ext
1 )
16

puis au système M2
d~σO(M2)
dt=−−−→OM2 ∧ (~f1→2 + ~f ext
2 )
et enfin au système {M1,M2}
d~σOdt
=d~σO(M1)
dt+
d~σO(M2)
dt= ~M ext
O =−−−→OM1 ∧ ~f ext
1 +−−−→OM2 ∧ ~f ext
2
On en déduit
~M intO =
−−−→OM1 ∧ ~f2→1 +
−−−→OM2 ∧ ~f1→2 = ~0
Le moment des forces intérieures est nul.La résultante des forces intérieures étant nulle ~f2→1 = −~f1→2, on peut alors déduire de larelation précédente
(−−−→OM2 −
−−−→OM1) ∧ ~f1→2 =
−−−−→M1M2 ∧ ~f1→2 = ~0
Ainsi, la loi de la quantité de mouvement et la loi du moment cinétique "contiennent" leprincipe des actions réciproques.
3. Solide en rotation autour d’un axe fixe : loi scalaire du momentcinétique
On considère un solide en rotation autour d’unaxe ∆ orienté fixe dans R galiléen.
Soit O un point quelconque de ∆. Le point Oest donc fixe dans R.
La loi du moment cinétique en O fixe dans R galiléen donne(
d~σO/R
dt
)R
= ~M extO . On projette
cette loi sur l’axe ∆ : (d~σO/R
dt
)R
.~u∆ = ~M extO .~u∆ = M ext
∆
~u∆ étant fixe dans R,(
d~u∆
dt
)R
= ~0.
On peut écrire(
d~σO/Rdt
)R
.~u∆ =
(d(~σO/R .~u∆)
dt
)R
=dσ∆
dt
17

On en déduit la loi scalaire du moment cinétique par rapport à l’axe ∆ orienté
dσ∆
dt= M ext
∆
On a montré que, pour un solide, σ∆ = J∆ω où ω = θ représente la vitesse angulaire de rotationdans le sens positif associé à l’orientation de ∆. La loi scalaire du moment cinétique devient :
J∆dω
dt= M ext
∆
4. Retour sur la liaison pivot
On considère un solide en rotation autour d’un axe fixe via une liaison pivot. Les actionsmécaniques subies au niveau de l’axe se traduisent par un couple Γ∆. D’après la loi scalaire dumoment cinétique
J∆dω
dt= Γ∆
Supposons que la rotation s’effectue dans le sens direct (ω > 0).
si Γ∆ > 0 alors dωdt> 0, ω ↗ , le couple est moteur
si Γ∆ < 0 alors dωdt< 0, ω ↘ , le couple est résistant
Supposons que l’on mette le solide en rotation puis qu’on le laisse tourner librement. S’il n’y apas de frottement au niveau de l’axe, sa vitesse angulaire restera constante au cours du temps.Dans le cas d’une liaison pivot idéale le moment des forces de liaison est nul :
Pour une liaison pivot idéale : Γ∆,liaison = 0
En général, pour les machines tournantes on fait intervenir la notion de stator et de rotor.Le rotor est la partie mobile en rotation par rapport au stator qui est fixe et en générallié au bâti. C’est le stator qui, via l’axe de rotation exerce un couple moteur ou résistant(freinage) sur le rotor.Nous reverrons également ces notions en fin d’année, lors de l’étude des moteurs électriques.
18

IV. Pendule pesant
1. Description
Un pendule pesant est un solide en rotation autour d’un axefixe horizontal.
∆ : axe fixe horizontal
Σ : solide en rotation autour de ∆, de masse m, de centrede masse G. On notera J∆ le moment d’inertie du solide parrapport à l’axe ∆.
On suppose la liaison pivot idéale Γ∆,liaison = 0
Système : {Σ}Référentiel : labo galiléenBilan des actions mécaniques : – Poids m~g qui s’exerce en G
– Réaction de l’axe ~R qui s’exerce sur l’axe doncM∆(~R) = 0
– Liaison idéale : Γ∆,liaison = 0
On peut vérifier que le point d’application du poids correspond au centre de masse du système.Pour cela considérons un système de deux points M1 et M2 de masses respectives m1 et m2.Le poids de l’ensemble vaut m1~g(M1) + m2~g(M2) = (m1 + m2)~g si l’on suppose que le champde pesanteur ~g est uniforme à l’échelle du système (~g(M1) = ~g(M2) = ~g). Soit O un pointquelconque. Soit M le point d’application de la résultante (m1 +m2)~g. On aura
−−→OM ∧ (m1 +m2)~g =
−−−→OM1 ∧m1~g +
−−−→OM2 ∧m2~g
= (m1
−−−→OM1 +m2
−−−→OM2) ∧ ~g
= (m1 +m2)−→OG ∧ ~g
On en déduit que M = G. Ce résultat est généralisable à tout sytème placé dans un champ depesanteur uniforme.
2. Équation du mouvement
L’axe ∆ étant fixe dans le référentiel du labo supposé galiléen, on peut appliquer la loi scalairedu moment cinétique.
dσ∆
dt= J∆
dω
dt= M∆(m~g) = −mgl sin θ
On a utilisé ici le bras de levier pour calculer directement M∆(~g).
19

Pour les accros au calcul de produit vectoriel on peut aussiécrire :
~MO(m~g) =−→OG ∧m~g = l ~ur ∧mg(cos θ~ur − sin θ~uθ)
= −mgl sin θ~ur ∧ ~uθ= −mgl sin θ ~u∆
M∆(m~g) = ~MO(m~g).~u∆ = −mgl sin θ
Enfin, on peut aussi calculer M∆(m~g) à partir de la formule M∆ = rFθ. Ici r = l etFθ = m~g.~uθ = −mg sin θ.
La vitesse angulaire ω vaut ω = θ d’où
J∆θ = −mgl sin θ
θ +mgl
J∆
sin θ = 0
On peut vérifier que cette équation est en accord avec l’équation du pendule rigide simple consti-tué d’une masse m accrochée à l’extrémité de la tige rigide de longueur l et de masse négligeable.Dans ce cas J∆ = ml2 et mgl
J∆= mgl
ml2= g
l. On retrouve alors l’équation du pendule simple
θ + gl
sin θ = 0.
L’équation du pendule pesant n’est pas linéaire. On peut, pour des petites oscillations θ � 1 radlinéariser le sinus : sin θ ' θ.
θ +mgl
J∆
θ = 0
En posant ω20 = mgl
J∆on retrouve alors l’équation de l’oscillateur harmonique :
θ + ω20 θ = 0 avec ω0 =
√mgl
J∆
Les oscillations de faibles amplitudes sont harmoniques et donc isochrones. Si on augmentel’amplitude, les oscillations ne sont plus harmoniques et la période des oscillations dépendrade l’amplitude (elle augmente quant l’amplitude augmente). La résolution de l’équation nonlinéaire ne peut se faire que numériquement.
20
3. Intégrale première
D’après la loi scalaire du moment cinétique
J∆θ = −mgl sin θ
On multiplie chaque membre de l’égalité par θ.
J∆θθ = −mgl sin θθ
ce qui permet de faire apparaître les dérivées temporelles :
d
dt
(1
2J∆θ
2
)=
d
dt(mgl cos θ)
d
dt
(1
2J∆θ
2 −mgl cos θ
)= 0
1
2J∆θ
2 −mgl cos θ = Cte
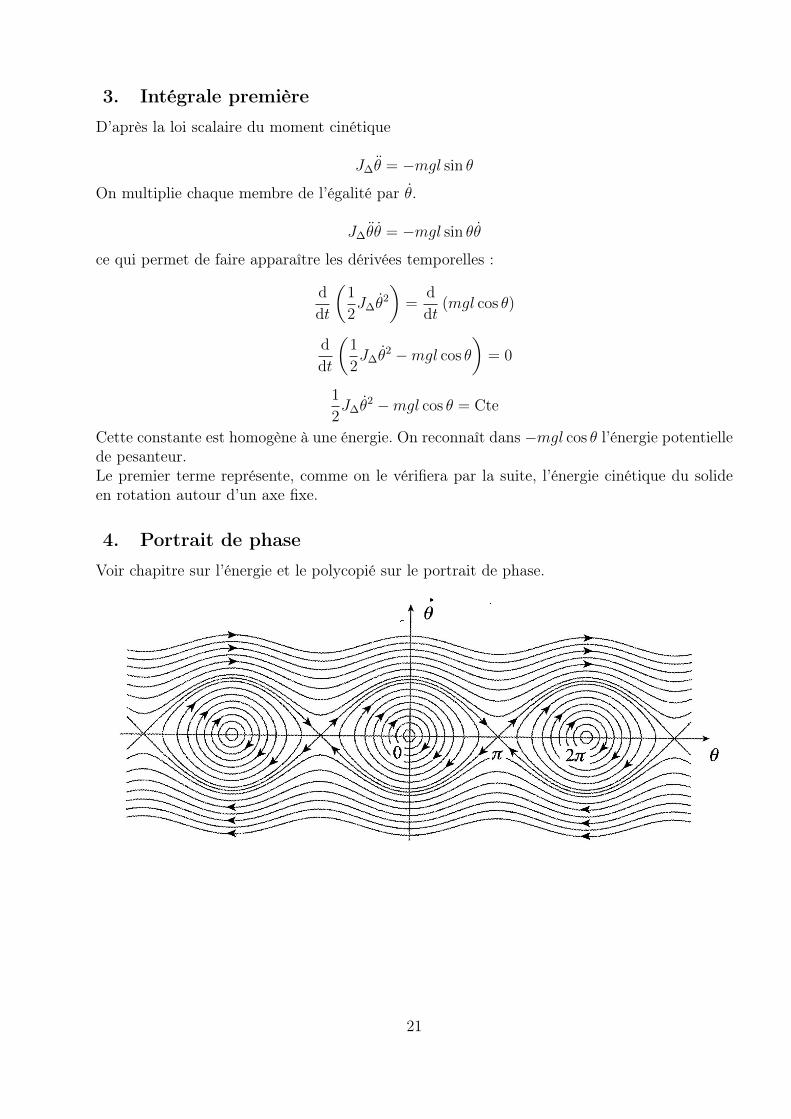
Cette constante est homogène à une énergie. On reconnaît dans −mgl cos θ l’énergie potentiellede pesanteur.Le premier terme représente, comme on le vérifiera par la suite, l’énergie cinétique du solideen rotation autour d’un axe fixe.
4. Portrait de phase
Voir chapitre sur l’énergie et le polycopié sur le portrait de phase.
21

V. Pendule de torsion
1. Couple de torsionLorsqu’on accroche le milieu d’une tige homogène àl’extrémité d’un fil métallique, celle-ci se stabilise àune position d’équilibre où la tension du fil compenseson poids (les deux forces s’exerçant en O) et oùaucun couple ne s’exerce par rapport à l’axe ∆.
Si on écarte la tige de cette position d’équilibre, ontord le fil qui exerce alors un couple de rappel quitend à ramener la tige vers sa position de repos. Lecouple de rappel a pour expression
Γ∆ = −K θ
Dimensionnellement K a les mêmes dimensions que Γ∆ et se mesure en N.m (Newton.mètre)en unités SI.
2. Équation du mouvement
Système : {Tige}Référentiel : labo galiléenBilan des actions mécaniques : – Poids m~g qui s’exerce en O donc M∆(m~g) = 0
– Tension du fil ~T qui s’exerce en O donc M∆(~T ) = 0
– Couple de torsion Γ∆ = −KθOn note J∆ le moment d’inertie de la tige par rapport à ∆. La loi scalaire du moment cinétiquedonne :
dσ∆
dt= J∆
dω
dt= Γ∆ = −Kθ
J∆θ = −Kθ
θ +K
J∆
θ = 0
On pose ω20 = K
J∆. On reconnaît l’équation de l’oscillateur harmonique :
θ + ω20 θ = 0 avec ω0 =
√K
J∆
qui admet des solutions de la forme
θ = θ0 cos(ω0t+ ϕ)
22

3. Intégrale première du mouvement
On procède comme précédemment : on exprime la loi scalaire du moment cinétique que l’onmultiplie ensuite par θ.
J∆θ = −Kθ
J∆θθ = −Kθθ
ce qui permet de faire apparaître les dérivées temporelles :
d
dt
(1
2J∆θ
2
)= − d
dt
(1
2Kθ2
)d
dt
(1
2J∆θ
2 +1
2Kθ2
)= 0
1
2J∆θ
2 +1
2Kθ2 = Cte
Cette constante est homogène à une énergie. Le premier terme est le même que celui obtenupour le pendule pesant et correspond à l’énergie cinétique de la barre. Le second est un termed’énergie potentielle dont nous établirons l’expression dans le chapitre suivant.Le premier terme représente, comme on le vérifiera par la suite, l’énergie cinétique du solideen rotation autour d’un axe fixe.
23

VI. Approche énergétique du solide en rotation
1. Énergie cinétique d’un solide en rotation autour d’un axe fixeOn considère un solide Σ en rotation autour d’un axe∆ fixe dans un référentiel R.On peut assimiler le solide à un système indéformablede points.Tous les points constituant le solide décrivent unmouvement circulaire d’axe ∆ avec lamême vitesseangulaire θ = ω.L’énergie cinétique du pointMi auquel on attribue lamasse Mi vaudra
ECi=
1
2miv
2i =
1
2mir
2iω
2
L’énergie cinétique totale vaudra donc
Ec =∑i
ECi=
1
2
(∑i
mir2i
)ω2
On reconnaît l’expression du moment d’inertie J∆ =∑i
mir2i qui permet d’aboutir à l’expres-
sion
Ec =1
2J∆ω
2
Remarque : en réalité, le "point" Mi est un petit volume élémentaire et le calcul de J∆ seconstruit à partir d’une intégration continue sur tout le volume du solide et nonpas par une sommation discrète.
2. Puissance d’une force s’exerçant sur un point d’un solide en ro-tation
La puissance de la force ~F s’exerçant au niveau dupoint M vaut, dans le référentiel R considéré,
P = ~F .~v = ~F . rω ~uθ = Fθrω
avec Fθ = ~F .~uθ la composante orthoradiale de la vi-tesse. On reconnaît M∆(~F ) = rFθ, le moment de laforce ~F par rapport à l’axe ∆. Ainsi
P = M∆(~F )ω
24

Cette expression est également applicable à la puissance d’un couple de moment Γ∆ par rapportà l’axe ∆ :
P = Γ∆ω
La puissance associée à une action mécanique dont le moment par rapport à l’axe ∆ orientéest M∆ vaut, pour une vitesse angulaire de rotation ω,
P = M∆ω
On en déduit l’expression du travail élémentaire δW = Pdt = M∆ωdt = M∆θdt = M∆dθ
δW = M∆dθ
Le travail total effectué entre un état initial où θ = θA et un état final où θ = θB s’exprimerasous la forme
WA→B =
∫ B
A
δW =
∫ θB
θA
M∆dθ
3. Théorème de l’énergie cinétique pour un solide en rotation
On considère un solide en rotation à la vitesse angulaire ω autour d’un axe ∆ fixe dans unréférentiel R galiléen.La loi scalaire du moment cinétique donne
J∆dω
dt= M ext
∆
En multipliant chaque membre de l’égalité par ω on obtient
J∆dω
dtω = M ext
∆ ω
d
dt
(1
2J∆ω
2
)= M ext
∆ ω
dEcdt
= M ext∆ ω = Pext
La dérivée de l’énergie cinétique Ec par rapport au temps (puissance cinétique) est égale à lapuissance des actions mécaniques extérieures.On a les formes équivalentes
dEc = M ext∆ ωdt = M extdθ = δW ext
∆Ec =
∫ θB
θA
M ext∆ dθ
Il y a équivalence entre le théorème de l’énergie cinétique et la loi scalaire du moment cinétique.
25

4. Action mécaniques conservatives - Énergie potentielle
Une action mécanique de moment M∆ par rapport à un axe ∆ orienté sera conservative si sontravail élémentaire peut s’écrire sous la forme
δW = M∆dθ = −dEp
avec Ep énergie potentielle associée à l’action mécanique considérée. Ep est une fonction de θ.Dans ce cas
WA→B =
∫ B
A
δW =
∫ θB
θA
M∆dθ =
∫ θB
θA
−dEp = Ep(θA)− Ep(θB)
le travail ne dépend que de l’angle initial θA et de l’angle final θB et ne dépend pas de lamanière dont on est passé de l’un à l’autre.
Exemple 1 : couple de torsionLe travail élémentaire du couple de torsion pour une variation dθ de l’angle vaut
δW = Γ∆ dθ = −Kθ dθ = −dEp
dEp = Kθ dθ
Ep =1
2Kθ2 + Cte
Si on choisit Ep = 0 pour θ = 0 alors Cte=0 et
Ep =1
2Kθ2
Exemple 2 : pendule pesantLe travail élémentaire du poids pour une variation dθ de l’angle vaut
δW = M∆ dθ = −mgl sin θ dθ = −dEp
dEp = mgl sin θ dθ
Ep = −mgl cos θ + Cte
Si on choisit Ep = 0 pour θ = π2alors Cte=0 et
Ep = −mgl cos θ
26

Remarque : On a établi dans le cours que Ep = mgz,avec l’axe Oz orienté vers le haut et Ep = 0 pour z = 0.Ici z correspondra à la coordonnée verticale du centrede masse G du système.
zG = −l cos θ
On retrouve bien Ep = mgzG = −mgl cos θ
5. Énergie mécanique
On considère toujours un solide en rotation autour d’un axe fixe dans un référentiel R galiléen.Le théorème de l’énergie cinétique donne
dEc = δW extcons + δW ext
n.c.
δW extcons travail élémentaire des actions mécaniques extérieures conserva-
tives δW extcons = −dEext
p
δW extn.c. travail élémentaire des actions extérieures non conservatives (ex : couple de frotte-
ment ou couple moteur).Ainsi
dEc = −dEextp + δW ext
n.c.
d(Ec + Eextp ) = δW ext
n.c.
L’énergie mécanique Em = Ec + Eextp vérifie donc
dEm = δW extn.c.
ce qui peut s’exprimer de manière équivalente
dEmdt
= Pextn.c.
avec Pextn.c. la puissance des forces non conservatives.
Si au cours du mouvement seules les actions mécaniques conservatives travaillentalors l’énergie mécanique est conservée : le mouvement est conservatif.
Exemple :On peut retrouver l’équation du mouvement du pendule de torsion à partir de la conservationde l’énergie mécanique.Au cours du mouvement, la seule action mécanique qui travaille est le couple de rappel quidérive de l’énergie potentielle 1
2Kθ2. Le mouvement est conservatif.
27

Em = Ec + Ep =1
2J∆θ
2 +1
2Kθ2 = Cte
dEmdt
=1
�2J∆�2θθ +
1
�2K�2θθ = θ(J∆θ +Kθ) = 0
La solution θ = 0 étant sans intérêt, on conserve
J∆θ +Kθ = 0
On retrouve bien ainsi l’équation du mouvement.
28

VII. Bilan énergétique pour un système déformable
1. Première constatation
Considérons deux patineurs initialement immobiles sur la glace. S’ils se repoussent mutuelle-ment ils vont alors s’éloigner dans deux directions opposées. Le système constitué des deuxpatineurs n’aura acquis aucune quantité de mouvement (le c.d.m. G du système reste fixe) etaucun moment cinétique. Pourtant le système a acquis de l’énergie cinétique : cette énergiecinétique provient du travail des forces intérieures au systèmes qui est intervenu lorsque lesdeux patineurs se sont repoussés mutuellement.
2. Travail des forces intérieures
Soit deux points Mi et Mj d’un système. On note~fi→j la force qu’exerce Mi sur Mj. D’après le prin-cipe des actions réciproques :
~fi→j = −~fj→i = fi→j ~ui→j
fi→j > 0 interaction répulsivefi→j < 0 interaction attractive
On note δW int le travail élémentaire des forces intérieures pour des déplacements élémentairesd−−→OMi de Mi et d
−−→OMj de Mj.
δW int = ~fi→j.d−−→OMj + ~fj→i.d
−−→OMi
= ~fi→j.d−−→OMj − ~fi→j.d
−−→OMi
= ~fi→j.(d−−→OMj − d
−−→OMi)
= ~fi→j.d−−−→MiMj
Or−−−→MiMj = rij~ui→j, d’où d
−−−→MiMj = drij~ui→j + rijd~ui→j.
~ui→j étant un vecteur unitaire ‖~ui→j‖ = 1, ~u2i→j = 1, d(~u2
i→j) = 0. On en déduit
2~ui→j.d~ui→j = 0
δW int = fi→j~ui→j.(drij~ui→j + rijd~ui→j)
= fi→jdrij + fi→j ~ui→j.d~ui→j︸ ︷︷ ︸=0
= fi→jdrij
Ainsi, pour qu’une force intérieure travaille il faut que la distance rij entre deux points dusystème varie et donc que le système soit déformable.Pour un système indéformable (comme un solide), le travail des forces intérieures est nul.Remarque : la puissance des forces intérieures est indépendante du référentiel d’étude.
29

3. Théorème de l’énergie cinétique pour un système déformable
On se place dans un référentiel R galiléen. La dérivée par rapport au temps de l’énergiecinétique d’un système mécanique est égale à la somme des puissances des forces intérieures etextérieures.
dEcdt
= P int + Pext
Autres formulations :
dEc = P intdt+ Pextdt
dEc = δW int + δW ext
où δW int représente le travail élémentaire des forces intérieures et δW ext le travail élémentairedes forces extérieures,ainsi que
∆Ec = W int +W ext
où W int représente le travail des forces intérieures et W ext les travail des forces extérieures.
Remarque :On peut écrire δW int = −dEint
p + δW intn.c. où −dEint
p représente le travail élémentaire des forcesintérieures conservatives (dérivant de l’énergie potentielle Eint
p ) et où W intn.c. représente le travail
des forces intérieures non conservatives.De même δW ext = −dEext
p + δW extn.c. où −dEext
p représente le travail élémentaire des forcesextérieures conservatives (dérivant de l’énergie potentielle Eext
p ) et où δW extn.c. représente le travail
des forces intérieures non conservatives. Ainsi
dEc = −dEintp + δW int
n.c. − dEextp + δW ext
n.c.
d(Ec + Eintp + Eext
p ) = δW intn.c. + δW ext
n.c.
On peut définir une énergie mécanique Em = Ec + Eintp + Eext
p telle que
dEm = δW intn.c. + δW ext
n.c.
4. Exemple : bilan énergétique du tabouret d’inertie
On peut visualiser l’expérience sur le site :http://alain.lerille.free.fr/VideosPhysique/ConservationMomentCinetique.htmlOn constate qu’un rapprochement des haltères de l’axe de rotation augmente notablement lavitesse de rotation : c’est une conséquence de la conservation du moment cinétique. Qu’en est-ilde l’énergie cinétique ?
30

Système : {tabouret tournant+homme+haltères}
• Position 1 : bras tendus, haltères loin de l’axe de rotation.
• Position 2 : bras repliés, haltères près de l’axe de rotation.
J2 < J1
Loi scalaire du moment cinétique :
dσ∆
dt= M ext
∆
Le moment du poids par rapport à l’axe ∆ est nul (le poids est parallèle à l’axe). Le momentde la réaction du support de l’axe est nulle (puisqu’elle s’exerce sur l’axe) et enfin on a supposéla liaison pivot idéale (Γ∆,liaison = 0). On a donc M ext
∆ = 0.
dσ∆
dt= 0
→ le moment cinétique par rapport à l’axe se conserve.
σ∆ = J2ω2 = J1ω1
ω2 =J1
J2
ω1
J1 > J2 donc ω2 > ω1 la vitesse angulaire de rotation augmente.
On peut alors calculer la variation d’énergie cinétique
∆Ec =1
2J2 ω
22 −
1
2J1 ω
21 = W ext︸︷︷︸
=0
+W int
W ext = 0 car la liaison pivot au niveau de l’axe de rotation du tabouret est supposée idéale etque les autres forces extérieures (poids, réaction) ne travaillent pas au cours du mouvement.
Ec2 =1
2J2 ω
22 =
1
2J2
(J1
J2
ω1
)2
=J1
J2
(1
2J1ω
21
)=J1
J2
Ec1
J2 < J1 d’où Ec2 > Ec1 .
passage de 1→ 2 ∆Ec > 0 W int > 0
passage de 2→ 1 ∆Ec < 0 W int < 0
Seule la prise en compte du travail des forces intérieures permet d’expliquer la variation del’énergie cinétique du système.
31





























