Embed Size (px)
DESCRIPTION
PMU
Citation preview
Nati
onal In
stit
ute
of
Sci
en
ce &
Tech
nolo
gy
B.Tech Technical Seminar Presentation-2014N
ati
onal In
stit
ute
of
Sci
en
ce &
Tech
nolo
gy
1.1
PHASOR MESUREMENT UNIT RELIABILITY ANALYSIS
By
MITHLESH KUMAR RANA
Under the guidance of
Mr. BALAKRUSHNA SAHU
MITHLESH KUMAR RANA (Roll No# 201110543)
Nati
onal In
stit
ute
of
Sci
en
ce &
Tech
nolo
gy
B.Tech Technical Seminar Presentation-2014N
ati
onal In
stit
ute
of
Sci
en
ce &
Tech
nolo
gy
1.2
OVERVIEWOVERVIEW
• What is PMU ?
• Hardware Configuration of PMU
• PMU installation in power grid
• Application of PMU
• Markov model
MITHLESH KUMAR RANA (Roll No# 201110543)
Nati
onal In
stit
ute
of
Sci
en
ce &
Tech
nolo
gy
B.Tech Technical Seminar Presentation-2014N
ati
onal In
stit
ute
of
Sci
en
ce &
Tech
nolo
gy
1.3
WHAT IS PMU ?WHAT IS PMU ?
•No rays reflected from the cloak-surrounded object - it can not be
seen & is invisible
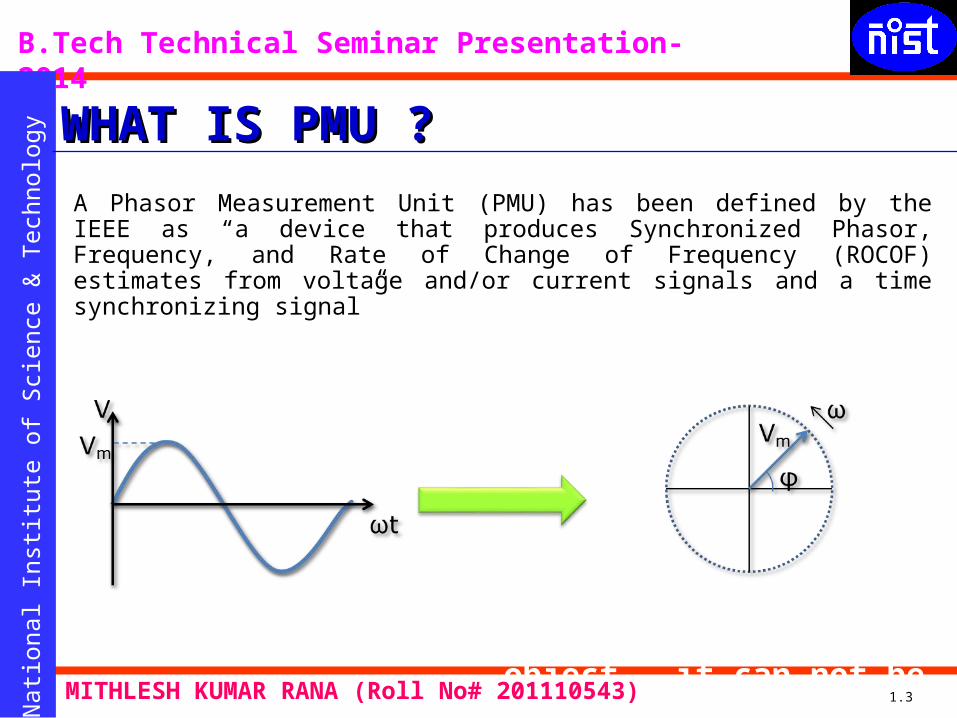
A Phasor Measurement Unit (PMU) has been defined by the IEEE as “a device that produces Synchronized Phasor, Frequency, and Rate of Change of Frequency (ROCOF) estimates from voltage and/or current signals and a time synchronizing signal”
MITHLESH KUMAR RANA (Roll No# 201110543)
Nati
onal In
stit
ute
of
Sci
en
ce &
Tech
nolo
gy
B.Tech Technical Seminar Presentation-2014N
ati
onal In
stit
ute
of
Sci
en
ce &
Tech
nolo
gy
1.4MITHLESH KUMAR RANA (Roll No# 201110543)
INFORMATION FROM PMUINFORMATION FROM PMU
GPS Time Synchronized measuring device: Inputs: 3 Phase Voltage 3 Phase Current
Outputs:
Voltage Magnitude & Angle (Phasor) Current Magnitude & Angle (Phasor) Frequency (deviation from nominal in MHz) Rate-of-change of frequency (ROCOF in Hz/s)
Nati
onal In
stit
ute
of
Sci
en
ce &
Tech
nolo
gy
B.Tech Technical Seminar Presentation-2014N
ati
onal In
stit
ute
of
Sci
en
ce &
Tech
nolo
gy
1.5
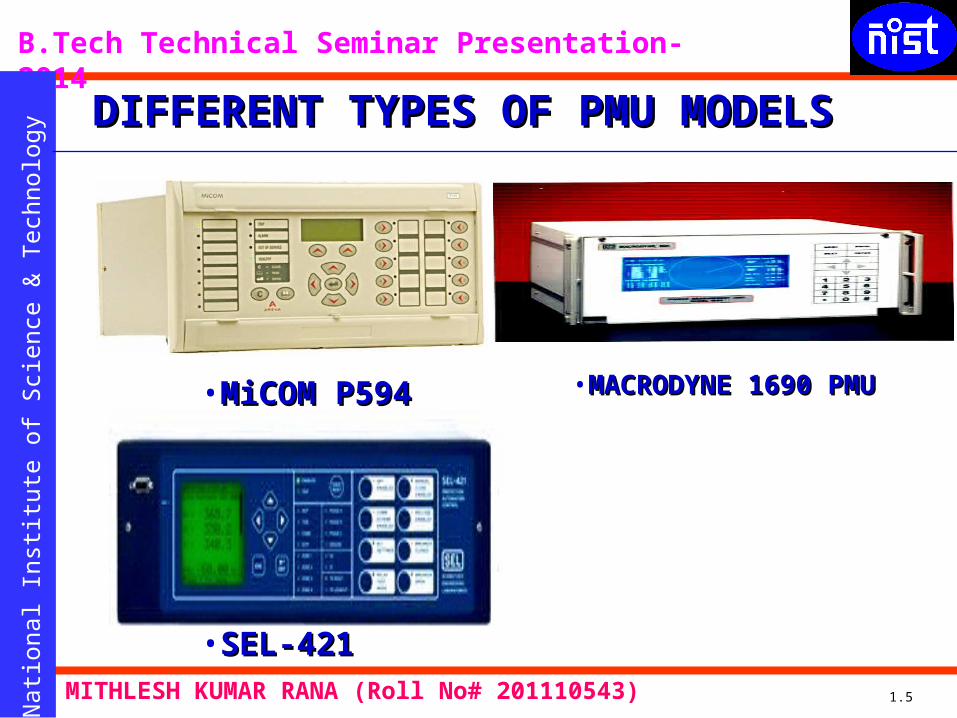
DIFFERENT TYPES OF PMU MODELSDIFFERENT TYPES OF PMU MODELS
MITHLESH KUMAR RANA (Roll No# 201110543)
•MiCOM P594MiCOM P594 •MACRODYNE 1690 PMUMACRODYNE 1690 PMU
•SEL-421SEL-421
Nati
onal In
stit
ute
of
Sci
en
ce &
Tech
nolo
gy
B.Tech Technical Seminar Presentation-2014N
ati
onal In
stit
ute
of
Sci
en
ce &
Tech
nolo
gy
1.6
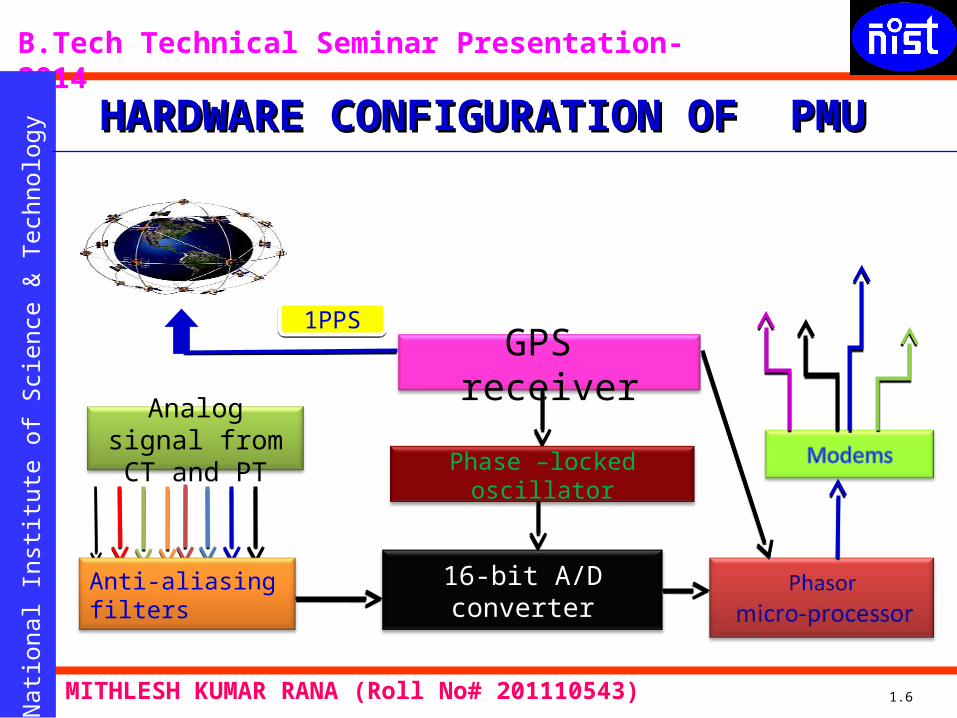
HARDWARE CONFIGURATION OF PMUHARDWARE CONFIGURATION OF PMU
MITHLESH KUMAR RANA (Roll No# 201110543)
1PPS1PPS
GPS receiverAnalog signal
from CT and PTPhase –locked oscillator
16-bit A/D converterAnti-aliasing filters
Nati
onal In
stit
ute
of
Sci
en
ce &
Tech
nolo
gy
B.Tech Technical Seminar Presentation-2014N
ati
onal In
stit
ute
of
Sci
en
ce &
Tech
nolo
gy
1.7
ANTI-ALIASING FILTERANTI-ALIASING FILTER
MITHLESH KUMAR RANA (Roll No# 201110543)
• An anti-aliasing filter is a filter used before a signal sampler, to restrict the bandwidth of a signal to approximately satisfy the Sampling theorem
• It is also called an Analog low pass filter
• Fs>2Fm over sampling (anti-aliasing)
• Fs<2Fm under sampling(aliasing)
• Fs=2Fm critical sampling
Nati
onal In
stit
ute
of
Sci
en
ce &
Tech
nolo
gy
B.Tech Technical Seminar Presentation-2014N
ati
onal In
stit
ute
of
Sci
en
ce &
Tech
nolo
gy
1.8
GPSGPS
• GPS satellites are powered by solar energy• The first GPS satellite was launched in 1978.
• A full constellation of 24 satellites was achieved in 1994.
MITHLESH KUMAR RANA (Roll No# 201110543)
Nati
onal In
stit
ute
of
Sci
en
ce &
Tech
nolo
gy
B.Tech Technical Seminar Presentation-2014N
ati
onal In
stit
ute
of
Sci
en
ce &
Tech
nolo
gy
1.9
GPSGPS RECEIVERRECEIVER
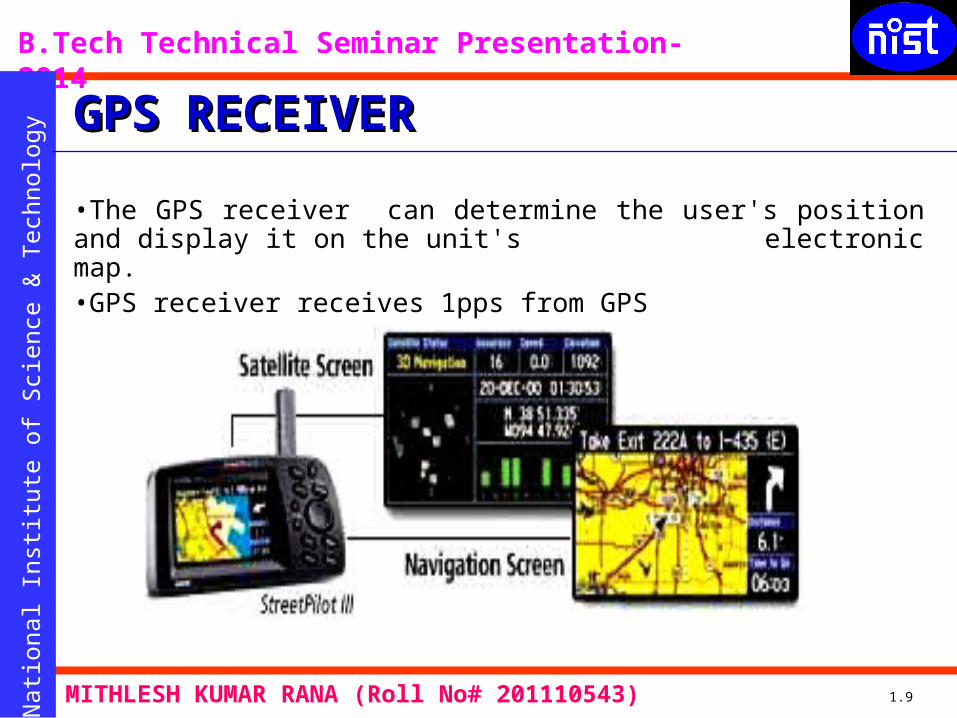
•The GPS receiver can determine the user's position and display it on the unit's electronic map. •GPS receiver receives 1pps from GPS
MITHLESH KUMAR RANA (Roll No# 201110543)
Nati
onal In
stit
ute
of
Sci
en
ce &
Tech
nolo
gy
B.Tech Technical Seminar Presentation-2014N
ati
onal In
stit
ute
of
Sci
en
ce &
Tech
nolo
gy
1.10
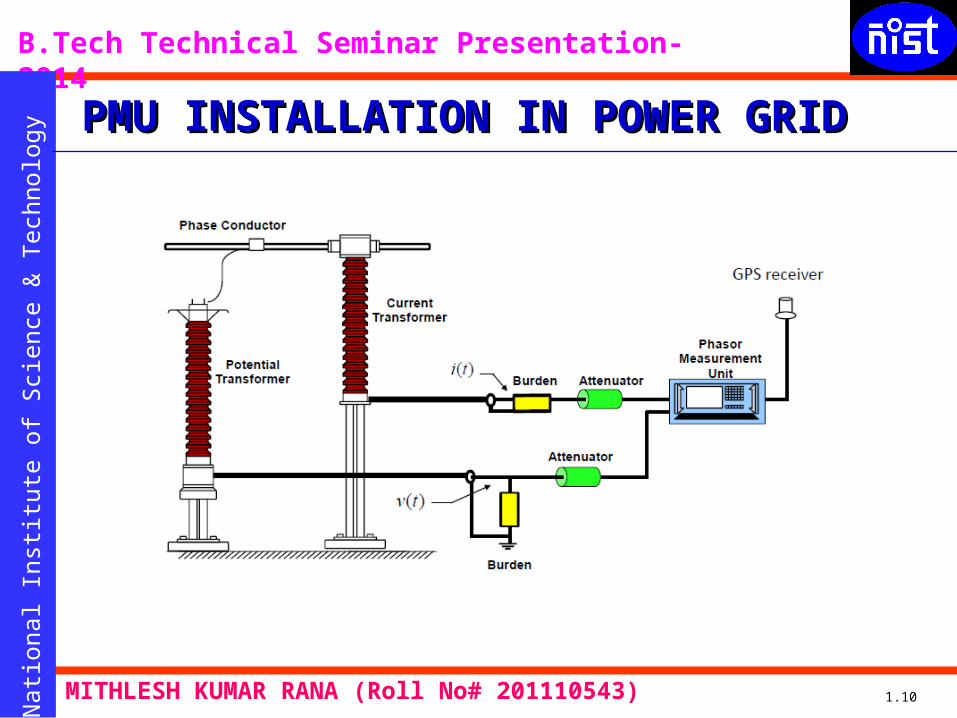
PMU INSTALLATION IN POWER GRIDPMU INSTALLATION IN POWER GRID
MITHLESH KUMAR RANA (Roll No# 201110543)
Nati
onal In
stit
ute
of
Sci
en
ce &
Tech
nolo
gy
B.Tech Technical Seminar Presentation-2014N
ati
onal In
stit
ute
of
Sci
en
ce &
Tech
nolo
gy
1.11
APPLICATIONS OF PMUAPPLICATIONS OF PMU
• Angle and Frequency Monitoring
• Transmission Fault Location and Estimation
• Control of WAMS
• Traveling wave fault detection
MITHLESH KUMAR RANA (Roll No# 201110543)
Nati
onal In
stit
ute
of
Sci
en
ce &
Tech
nolo
gy
B.Tech Technical Seminar Presentation-2014N
ati
onal In
stit
ute
of
Sci
en
ce &
Tech
nolo
gy
1.12
WIDE AREA MONITORING (WAMS)WIDE AREA MONITORING (WAMS)
MITHLESH KUMAR RANA (Roll No# 201110543)
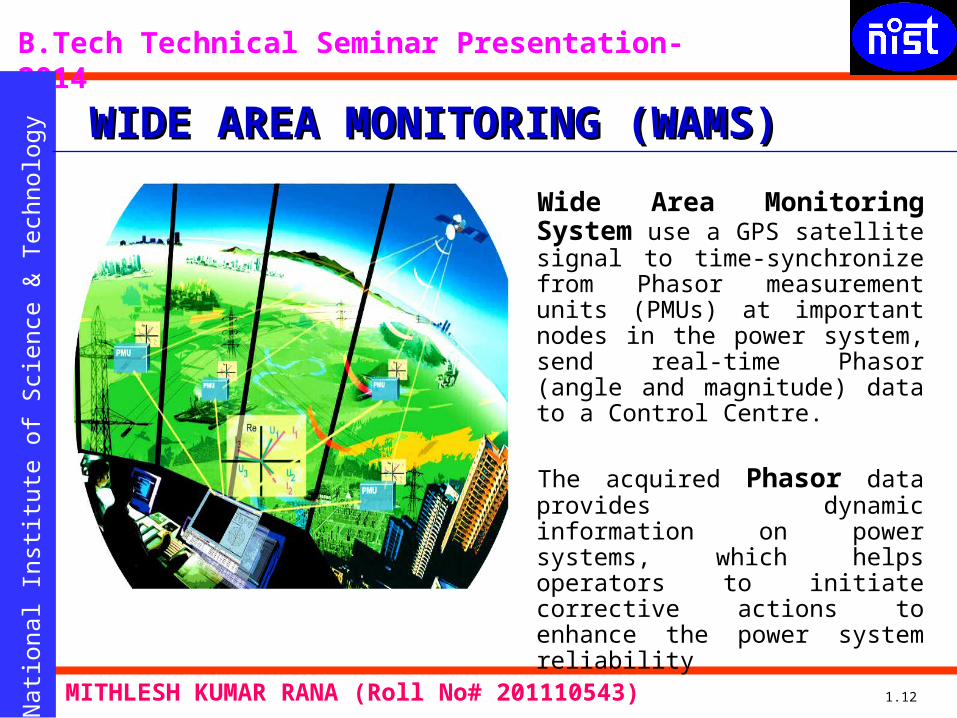
Wide Area Monitoring System use a GPS satellite signal to time-synchronize from Phasor measurement units (PMUs) at important nodes in the power system, send real-time Phasor (angle and magnitude) data to a Control Centre.
The acquired Phasor data provides dynamic information on power systems, which helps operators to initiate corrective actions to enhance the power system reliability
Nati
onal In
stit
ute
of
Sci
en
ce &
Tech
nolo
gy
B.Tech Technical Seminar Presentation-2014N
ati
onal In
stit
ute
of
Sci
en
ce &
Tech
nolo
gy
1.13
• Reliability is the probability of a device performing its purpose adequately for the period of time intended under the operating conditions encountered.
• The ability of a system or component to perform its required functions under stated condition for a specified period of time
Nati
onal In
stit
ute
of
Sci
en
ce &
Tech
nolo
gy
RELIABILITYRELIABILITY
MITHLESH KUMAR RANA (Roll No# 201110543)
Nati
onal In
stit
ute
of
Sci
en
ce &
Tech
nolo
gy
B.Tech Technical Seminar Presentation-2014N
ati
onal In
stit
ute
of
Sci
en
ce &
Tech
nolo
gy
1.14
MARKOVMARKOV MODELMODEL
MITHLESH KUMAR RANA (Roll No# 201110543)
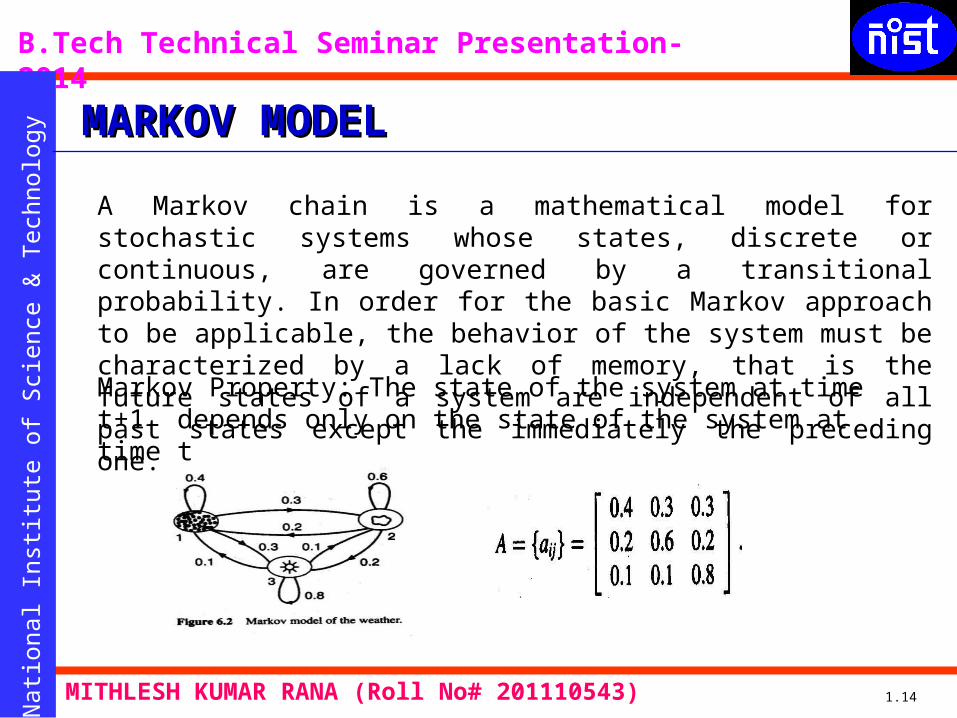
A Markov chain is a mathematical model for stochastic systems whose states, discrete or continuous, are governed by a transitional probability. In order for the basic Markov approach to be applicable, the behavior of the system must be characterized by a lack of memory, that is the future states of a system are independent of all past states except the immediately the preceding one.
Markov Property: The state of the system at time t+1 depends only on the state of the system at time t
Nati
onal In
stit
ute
of
Sci
en
ce &
Tech
nolo
gy
B.Tech Technical Seminar Presentation-2014N
ati
onal In
stit
ute
of
Sci
en
ce &
Tech
nolo
gy
1.15MITHLESH KUMAR RANA (Roll No# 201110543)
REFERENCESREFERENCES [1]. R. F. Nuqui and A. G. Phadke, “Phasor measurement unit placement techniques for complete and incomplete observability,” IEEE Trans .Power Del., vol. 20, no. 4, pp. 2381–2388, Oct. 2005
[2]. R. Billiton, M. Fotuhi-Firuzabad, and L. Bertling, “Bibliography on the application of probability methods in power system reliability evaluation: 1996–1999,” IEEE Trans. Power Syst.,vol.16,no.4, pp.595–602, Nov. 2001.
Nati
onal In
stit
ute
of
Sci
en
ce &
Tech
nolo
gy
B.Tech Technical Seminar Presentation-2014N
ati
onal In
stit
ute
of
Sci
en
ce &
Tech
nolo
gy
1.16MITHLESH KUMAR RANA (Roll No# 201110543)



























![Seminar [autosaved]](https://img.pdfslide.fr/doc/110x75/58a2dd491a28ab692e8b70b1/seminar-autosaved.jpg)

