-
7/28/2019 Poly Chaleur
1/24
Chapitre 9
Introduction aux problemes
devolution : Lequation de lachaleur instationnaire
9.1 Position du problemeLa temperature u(x, t ) dun corps de
volume , de densite , de chaleur
specique c et de conductivite thermique k est regie au cours du
temps parlequation :
cut
= div (k grad u) + f x et t[0, T ]
ou f represente la puissance volumique fournie au corps .
Si la conductivite k est constante, lequation se reduit ` a
:
cut
= k u + f x et t[0, T ]
Ce probleme du premier ordre en temps est le modele des
problemes paraboliques.La determination de la solution necessite de
xer une condition initiale entemps : valeur de la temperature u au
temps 0.
u(x, 0) = u0(x)
On dit que le probleme est un probleme ` a valeur initiale ou
probleme de Cauchy.
Dautre part, un certain nombre de conditions aux limites sur la
frontiere dudomaine peuvent etre prises en compte pour determiner
completement la solution.
225
-
7/28/2019 Poly Chaleur
2/24
226
Conditions de type Dirichlet lorsque la temperature est xee sur
une partiede la frontiere
Conditions de type Neumann si le ux thermique est xe (nul dans
le casdun materiau isole thermiquement)
Conditions de type Fourier dans le cas le plus general dun
echange convectif avec le milieu exterieur, etc, comme dans le cas
stationnaire.
Remarque 9.1.1 (solution stationnaire) Lorsque la temperature ne
depend plus du temps (regime permanent ou stationnaire), on
retrouve lequation dej` a etudiee :
div (k grad u) = f x+ Conditions aux limites sur
9.2 Etude mathematique de lequation monodi-mensionnelle
Nous allons maintenant donner les principales proprietes
caracteristiques desproblemes de type paraboliques en nous
appuyant, pour simplier, sur le casde lequation de la chaleur
monodimensionnelle.
9.2.1 Le modele de la barre innieConsiderons tout dabord le
modele de la barre innie, sans apport de chaleur
et dont la temperature est initialement donnee. Il est clair
que, selon le premierprincipe de la thermodynamique, la temperature
de la barre doit decrotre aucours du temps. Ecrivons lequation du
modele :
Trouver u : (x, t ) u(x, t ) telle que : t
u(x, t ) = 2
x 2u(x, t ) xIR et t[0, T ]
u(x, 0) = u0(x) donnee
Soit F (, t ) la transformee de Fourier de u denie par :
F (, t ) = +
exp (2ix ) u(x, t ) dx
La transformation de Fourier de lequation :
t
u(x, t ) = 2
x 2u(x, t )
-
7/28/2019 Poly Chaleur
3/24
227
secrit : t
F (, t ) + 4 2 2F (, t ) = 0
F (, 0) est la transformee de Fourier de la condition initiale
u0. La resolution delequation differentielle du premier ordre en
temps ci-dessus donne donc :
F (, t ) = exp (4 2 2t) F (, 0)Or
exp (
4 2 2t) = F (
1
4texp (
x2
4t))
etF (f g) = F (f ) F (g)
Donc la transformee de Fourier de la solution u est egale a la
transformee duproduit de convolution de u0 et 1 4t exp (x
2
4t ). Ceci donne, par transformationde Fourier inverse,
lexpression classique de la solution u :
u(x, t ) =1
2 t
+
exp (
(x y)24t
) u0(y) dy
9.2.2 Proprietes fondamentales de la solution
Nous en deduisons les proprietes fondamentales de la solution u
du problemede la chaleur.
1. La solution en un point particulier depend de la condition
initiale en tousles points du domaine. Le domaine de dependance de
la solution setend audomaine tout entier.
2. Une perturbation en un point quelconque de la solution
initiale inuence
immediatement la valeur en tout point de la solution u . On dit
que la vitessede propagation est innie.
3. La valeur ponctuelle de la solution decrot au cours du
temps.
4. t doit etre positif. Le phenomene est irreversible, on ne
peut pas remonterle temps.
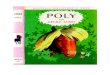
5. Enn, loperateur de la chaleur a un effet regularisant. Pour
une conditioninitiale dans L2(), la solution u est C pour tout
temps t > 0 (voir unexemple en gure 9.1).
-
7/28/2019 Poly Chaleur
4/24
228
0 1 2 3 4 5 6 7 8 9 100
0.2
0.4
0.6
0.8
1
1.2
Fig. 9.1 Effet regularisant de loperateur de la chaleur. On voit
ici la suite desolutions en temps a partir dune condition initiale
en fonction porte discontinue
9.2.3 Le modele de la barre nie avec conditions auxlimites de
Dirichlet homogenes
On considere une barre de longueur L dont la temperature est xee
` a zeroaux extremites. Lequation de la temperature au cours du
temps secrit :
t
u(x, t ) = 2
x 2u(x, t ) + f (x, t ) x[0, L ] et t[0, T ]
u(x, 0) = u0(x) donnee : condition initiale
u(0, t ) = u(L, t ) = 0 : conditions aux limites de Dirichlet
homogenes
Les fonctions k denies par
k (x) = sin (kL
x) pour k = 1 , 2, ...n, .. (9.1)
sont fonctions propres de loperateur
2
x 2avec conditions de Dirichlet homogenes
associees aux valeurs propres k =k2 2
L2. Dautre part les fonctions k forment
une famille orthogonale de L2[0, L ].
Exprimons la solution u comme combinaison lineaire des k
u(x, t ) =k
u k (t)k (x)
-
7/28/2019 Poly Chaleur
5/24
229
et supposons connu un developpement de f sous la meme forme
:
f (x, t ) =k
f k (t)k (x)
En reportant ces expressions de u et de f dans lequation aux
derivees partielles,on obtient un ensemble dequations
differentielles en temps independantes pourchaque k .
du kdt
+k2 2
L2uk = f k
dont la solution secrit :
uk (t) = u k (0) exp (
k2 2
L2 t) +
t
0
exp (
k2 2
L2 (t
s)) f k (s) ds
Dans le cas particulier f = 0, on trouve :
u k (t) = u k (0) exp (k2 2
L2t)
On admet la convergence dans L2[0, L ] de la serie de Fourier de
coefficients uk (t)vers la solution u du probleme et ceci t . Dou
lexpression de la solution
u(x, t ) =k
u k (0) exp (k2 2
L2t) sin (
kL
x)
Remarque 9.2.1 (importante) La decomposition en modes propres
presentee ci-dessus est possible en raison de la propriete
essentielle de linearite du probleme de la chaleur. Elle revele une
propriete fondamentale de loperateur de la chaleur : son effet de
lissage . En effet la decroissance des modes en exp (k
2 2
L 2 t)est dautant plus rapide que le nombre donde k est grand.
Les hautes frequences sont donc amorties les premieres. Cet effet
de lissage a des consequences positives pour lapproximation
numerique, car des erreurs locales dinitialisation ou de calcul,
qui correspondront `a des modes de frequence elevee, seront
immediatement amorties.
9.3 Lequation bi ou tridimensionnelleReprenons le probleme
initial de la chaleur et considerons pour simplier unprobleme de
Cauchy en temps `a conditions aux limites de Dirichlet homogenesen
espace.
t
u(x, t ) = u(x, t ) + f (x, t ) x et t[0, T ]
u(x, 0) = u0(x) donnee : condition initiale
u | (x, t ) = 0 : conditions aux limites de Dirichlet
homogenes
-
7/28/2019 Poly Chaleur
6/24
230
0 1 2 3 4 5 6 7 8 9 101
0.5
0
0.5
1
1.5
2
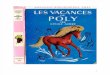
Fig. 9.2 Effet de lissage de loperateur de la chaleur. La
condition initiale estsin (x ) + sin (10x ). On observe la
decroissance immediate des oscillations ensin (10x ) avant que le
mode fondamental ne commence a decrotre.
9.3.1 Formulation variationnellePla cons-nous, pour simplier
lexpose, dans le cas dun domaine plan. La
formulation variationnelle du probleme sobtient, comme dans le
cas stationnaire,par multiplication par des fonctions tests
independantes du temps appartenant ` alespace H 10 (), compte tenu
des conditions aux limites choisies. Apres integrationen espace sur
le domaine et integration par parties par la formule de Green,on
obtient le probleme variationnel :
Trouver pour tout t[0, T ], u : (x,y, t ) u(x,y, t ) telle que
:
t u(x,y, t ) v(x, y ) dxdy + grad u grad v dxdy=
f (x,y, t ) v(x, y ) dxdy vH 10 ()
u(x,y, 0) = u0(x, y ) donnee
On admet le resultat dexistence et dunicite de la solution de ce
problemedevolution. A chaque instant t , la fonction u consideree
comme fonction desvariables despace x, y appartient alors `a
lespace H 10 ()
Notons ( ., . ) le produit scalaire de L2(), et a : (u, v ) a(u,
v ) la formebilineaire elliptique dans H 10 () :a (u, v ) = grad u
grad v dxdy
-
7/28/2019 Poly Chaleur
7/24
231
On obtient lecriture suivante de la formulation variationnelle
du problemeparabolique ci-dessus :
Trouver pour tout t[0, T ], u : (x,y, t ) u(x,y, t ) telle que
:(
ut
, v) + a(u , v ) = ( f, v ) vH 10 ()
u(x,y, 0) = u0(x, y ) donnee
On rappelle lellipticite de a dans H 10 . Donc il existe une
constante strictementpositive telle que :
a(v, v )
v 21,2
v
H 10
9.3.2 Propriete de dissipation de lenergieEn prenant v = u(x,y,
. ) dans la formulation variationnelle, on obtient
12
ddt
u 20, + a(u, u ) = ( f, u )
ou . 0, designe la norme de L2()
Utilisons alors lellipticite de a et la majoration de la norme
de L2 par la normeH 1
a (u, u ) u 2V u 20,on obtient :
12
ddt
u 20, + u20, f 0, u 0,
dou :ddt
u 0, + u 0, f 0,Multiplions alors les deux membres de linegalite
par et , on obtient
ddt
[et u(t) 0,] et f 0,et en integrant en temps de 0 `a T :
u(T ) 0, eT u0 0, + T
0e (T t ) f (t) 0, dt
On observe a nouveau, dans le cas ou f est nulle, cest a dire en
labsence de sourcede chaleur, la decroissance en temps de la norme
L2 de la solution. Remarquonsque cette decroissance de la norme L2
de la solution est exponentielle en temps.
-
7/28/2019 Poly Chaleur
8/24
232
Cette propriete de decroissance, damortissement ou de
dissipation denergie estcaracteristique des problemes paraboliques.
Elle est particulierement favorablepour lapproximation numerique.
En effet, toute perturbation survenant ` a uninstant donne, et en
particulier une perturbation due ` a des erreurs de calcul,
estamortie exponentiellement au cours du temps. Il est important
que les schemasnumeriques utilises respectent ce comportement
dissipatif au cours du temps.
Signalons enn que la technique precedente permet dobtenir sans
difficultelunicite de la solution u .
9.4Etude des schemas de differences nies dansle cas
monodimensionnel
9.4.1 IntroductionUne premiere methode pour resoudre
numeriquement les problemes devolutionconsiste a discretiser le
probleme continu par differences nies. Pla cons nous dansle cas
monodimensionnel dune barre de longueur L pour simplier. On choisit
unediscretisation reguliere de [0 , L ] en intervalles de longueur
x tels que L = M xet une discretisation de lintervalle de temps [0
, T ] en pas de temps de longueur
t
tels queT
=N
t. Notons
x j le point
j
xet
tn le temps
n
t. Notons
u n j lavaleur de la solution approchee au point x j et au temps
t n .
Denition 9.4.1 Un schema aux differences nies est dit schema ` a
p pas en temps si les valeurs un +1 j des solutions approchees au
temps t n +1 sont fonctions des valeurs aux p instants precedents,
soit aux temps t n , t n 1, ...t n p+1 . En particulier,un schema
est dit a un pas si les u n +1 j ne dependent que des un j .
Les deux principales proprietes dun schema numerique sont :
lordre du schema qui mesure la precision ou erreur de troncature
mathematiquecommise en remplacant les derivees partielles exactes
par leurs approximationssous formes de differences divisees. Lordre
est determine par des developpementsde Taylor obtenus en injectant
dans lecriture du schema numerique la fonctionsolution continue
exacte du probleme differentiel.
la stabilite du schema concerne levolution du vecteur des
valeurs approcheesde la solution aux points x j au cours des temps
t n (et non plus la solutionexacte continue) dans le cas concret o
u t et x ne tendent pas vers zero, maisont des valeurs xees.
Numeriquement, ce critere est relatif ` a la propagation
etlamplication des erreurs darrondis, la condition minimale de
stabilite impose
-
7/28/2019 Poly Chaleur
9/24
233
que le vecteur de composantes un j
reste borne pour tout n
[0, N ]. Sinon, il nestmeme pas calculable. Si lon desire de
plus que la solution approchee reproduisele comportement de la
solution exacte au cours du temps, on devra imposer desconditions
plus severes sur le schema numerique. Par exemple, dans le cas
delequation de la chaleur, on cherche `a reproduire sur la solution
numerique lecomportement dissipatif du probleme continu. On
choisira donc des schemas telsque la solution approchee soit
decroissante au cours du temps.
9.4.2 Le Schema dEuler expliciteNous allons preciser les
denitions des notions dordre et de stabilite en nous
appuyant sur lexemple le plus simple de schema numerique : le
schema dEulerexplicite (en temps) et centre (en espace).
Considerons le probleme t
u(x, t ) = 2
x 2u(x, t ) x[0, L ] et t[0, T ]
u(x, 0) = u0(x) donnee : condition initiale
u(0, t ) = u(L, t ) = 0 : conditions aux limites de Dirichlet
homogeneset choisissons les approximations classiques suivantes des
derivees premiere etseconde par differences nies
t
u(x j , t n ) u(x j , t n +1 ) u(x j , t n )
t( a O( t) pres)
2
x 2u(x j , t n )
u(x j +1 , t n ) 2u(x j , t n ) + u(x j 1, t n ) x2
( a O( x2) pres)
Rempla cons les derivees partielles par leurs approximations en
differences niesci-dessus et la fonction inconnue u par une
collection de valeurs discretes un jpour j = 0 ,..M et n = 0 , ..N
. Nous obtenons un premier exemple de schemadapproximation en
differences nies de lequation de la chaleur : le schemadEuler
explicite centre.
un +1 j u
n j
t= u
n j +1 2u
n j + u
n j 1
x2
u0 j = u0(x j ) donnee : condition initiale
un0 = u nM = 0 n : conditions aux limites de Dirichlet
homogenesCe schema est un schema `a un pas, car le vecteur des
solutions approchees autemps t n +1 ne depend que des solutions
approchees au temps t n . Cest un schemaexplicite car il donne une
formule explicite de calcul de la solution au temps t n +1en
fonction des valeurs de la solution au temps precedent. Il ny a pas
dequationa resoudre pour obtenir la valeur au nouvel instant t n +1
.
-
7/28/2019 Poly Chaleur
10/24
234
9.4.3 OrdreNotons S x, t u(x j , t n ) lapplication dun schema
aux differences nies `a la
solution continue u . Par exemple pour le schema dEuler
explicite centre :
S x, t u(x j , t n ) =u(x j , t n +1 ) u(x j , t n )
t u(x j +1 , t n ) 2u(x j , t n ) + u(x j 1, t n )
x2
Denition 9.4.2 Un schema aux differences nies est dordre p en
temps et dordre q en espace si la difference entre lequation et le
schema applique ` a la fonction solution du probleme continu est un
inniment petit dordre p en temps et dordre q en espace. Cest a dire
si lon a :
t
u(x j , t n ) 2
x 2u(x j , t n ) S x, t u(x j , t n ) ] = O ( t p) + O( xq)
Un schema consistant est un schema tel que lexpression ci-dessus
tende vers zero avec t et x .
Application : le schema dEuler explicite est dordre un en temps
et dordredeux en espace. On montrera en exercice que lon obtient en
effet pour ce schema
t
u(x j , t n ) 2
x 2u(x j , t n ) [
u(x j , t n +1 ) u(x j , t n ) t
u(x j +1 , t n ) 2u(x j , t n ) + u(x j 1, t n ) x2
] = t2
2
t 2u(x j , ) +
x2
12 4
x 4u(, t n )
Remarque 9.4.1 Au point x j , t n en derivant lequation on a
:
2
t 2 u(x j , t n ) = 4
x 4 u(x j , t n )
on pourrait optimiser lordre par un choix de pas de temps et
despace tel que
t2
= x2
12
On obtiendrait alors lordre 2 en temps et lordre 4 en espace.
Malheureusement ceci nest possible que pour des maillages reguliers
a pas constants et nest pas generalisable au cas des elements
nis.
-
7/28/2019 Poly Chaleur
11/24
235
9.4.4 StabiliteDans le cas de schemas a un pas appliques `a des
problemes lineaires, le vecteur
des solutions approchees au temps t n +1 est lie au vecteur des
solutions approcheesau temps t n par une relation matricielle.
Considerons le probleme modele
t
u(x, t ) = 2
x 2u(x, t )
et appliquons un schema numerique ` a un pas. Nous pouvons
exprimer le vecteurU n +1 des valeurs de la solution au temps t n
+1 en fonction du vecteur U n dessolutions au temps t n par :
U n +1 = C ( t, x) U n
ou C est une matrice caracterisant le schema et dependant des
pas de temps etdespace.On en deduit :
U n = C n U 0
ou U 0 est le vecteur des conditions initiales.
La condition minimale de stabilite sexprime par le fait que U n
reste borne
quel que soit n . Une condition plus forte impose la
decroissance de U n
quandn augmente.
Condition de stabilite de Von Neumann
Le schema est stable sil existe > 0 tel que C n soit
uniformement bornepour tout n et tout t veriant les conditions
:
0 < t < et 0 n t T Ce critere minimal de stabilite entrane
simplement que la suite U n ne soit pas
explosive. Il est satisfait si lon a la majorationC 1 + c t
En effet dans ce cas :
C 1 + c t = U n (1 + c t)n U 0 ecn t U 0 ecT U 0U n reste borne
pour tout n = 0 , ..N . Mais la constante de majoration
estexponentielle en la duree dintegration en temps T et donc
devient tres grandeavec T .
-
7/28/2019 Poly Chaleur
12/24
236
On peut en consequence preferer des conditions de stabilite plus
restrictives tellesque :
C 1En effet on a alors
U n U 0 n = 0 ,..N Si lon veut de plus que la solution numerique
reproduise le comportementdecroissant de la solution exacte on
imposera linegalite stricte
C < 1qui entrane la decroissance de la norme de U n .
9.4.5 Etude matricielle de la stabiliteSupposons que le schema
sexprime sous la forme matricielle presentee plus haut,on deduira
la stabilite de majorations de la norme de la matrice C
souventobtenues par le calcul de ses valeurs propres.
Exemple : le schema dEuler explicite
Reprenons le probleme
t
u(x, t ) = 2
x 2u(x, t ) x[0, L ] et t[0, T ]
u(x, 0) = u0(x) donnee : condition initiale
u(0, t ) = u(L, t ) = 0 : conditions aux limites de Dirichlet
homogenes
et appliquons le schema dEuler
un +1 j un j t
=u n j +1 2u n j + un j 1
x2
u0 j = u0(x j ) donnee : condition initiale
un0 = u nM = 0 n : conditions aux limites de Dirichlet
homogenes
On obtient aisement lecriture matricielle :
U n +1 = [ I t
x2A ]U n
-
7/28/2019 Poly Chaleur
13/24
237
ou A est la matrice tridiagonale symetrique dej` a rencontree
lors de la discretisationde la derivee seconde.
A =
2 1 0 01 2 1 0. . . . . . . . .0 . . . . . . . . . 10 1 2
Les vecteurs propres de A sont les analogues discrets des
fonctions propres k (voir
equation 9.1). On obtient les vecteurs propres V k de
composantes V k j = sin (kjM
).
Les valeurs propres associees sont :
k = 4 sin 2k2M
pour k = 1 , ...M 1ou M denote le nombre dintervalles de
discretisation de [0 , L ] et donc ou ladimension de A est egale a
M 1.La matrice C = I
t x2
A est une matrice symetrique reelle. Ses vecteurspropres sont
ceux de A , ses valeurs propres sont egales a :
k = 1
t
x2
k
Majorons la norme euclidienne de U n +1
U n +1 2 I t
x2A 2 U n 2
Comme la matrice C = I t
x2A est une matrice symetrique, sa norme
euclidienne est egale a son rayon spectral
I t
x2A 2 = ( I
t x2
A) = maxk =1 ,..M 1 |1 4
t x2
sin 2(k2M
) |La condition de stabilite C
1 se traduit donc par :
maxk =1 ,..M 1 |1 4
t x2
sin 2(k2M
) | 1 soit 4 t
x2sin 2( (
M 1)2M
) 2Ceci sera assure des que lon aura la majoration
t x2
12
Cette condition est la condition classique de stabilite du
schema dEuler explicitepour lequation de la chaleur. Elle impose
des pas de temps tres petits, ce quiexclut, dans la plupart des
cas, lusage de ce schema explicite pour les
problemesparaboliques.
-
7/28/2019 Poly Chaleur
14/24
238
9.4.6 Autres exemples de schemas a un pasSchema dEuler
implicite
On considere, pour la discretisation du meme probleme, le schema
implicitesuivant :
un +1 j un j t
=u n +1 j +1 2un +1 j + u n +1 j 1
x2
u0 j = u0(x j ) donnee : condition initiale
un0 = u nM = 0 n : conditions aux limites de Dirichlet
homogenes
Ce schema est dit implicite car le calcul de la solution au pas
de temps n + 1necessite la resolution dun systeme matriciel.
Ordre du schemaUn developpement de Taylor permet de verier
simplement que ce schema estdordre un en temps et dordre deux en
espace comme le schema explicite.
Stabilite du schemaLa meme analyse matricielle conduit au
resultat suivant :
[ I + t x2 A ]U n +1 = U n
La matrice diteration C est cette fois egale a :
C = ( I + t
x2A)1
Ses valeurs propres sont :k =
1
1 + t
x2 k
Elles sont donc strictement positives et strictement inferieures
` a 1 pour tout k. Cequi entrane la stabilite inconditionnelle
(quels que soient t et x) du schemaimplicite
Observons que lon a, avec ce schema, decroissance de la solution
approchee aucours des pas de temps.
U n +1 2 1
1 + t
x2 1
U n 2 avec 1 = 4 sin 2(
2M )
-
7/28/2019 Poly Chaleur
15/24
239
Schema de Crank-Nicolson ou schema des trapezes
On considere, pour la discretisation du meme probleme, le schema
implicitesuivant :
u n +1 j u n j t
=12
u n j +1 2u n j + un j 1 x2
+u n +1 j +1 2u n +1 j + un +1 j 1
x2
u0 j = u0(x j ) donnee : condition initiale
u n0 = unI = 0 n : conditions aux limites de Dirichlet
homogenes
Ce schema est dit implicite car le calcul de la solution au pas
de temps n + 1necessite la resolution dun systeme matriciel. Il
correspond ` a une integration entemps approchee selon la formule
des trapezes sur les instants t n et t n +1 .
Ordre du schema
Ce schema est dordre deux en temps et en espace.
Stabilite du schemaLe meme type danalyse matricielle que
precedemment conduit au resultatsuivant :
[ I + t
2 x2A ]U n +1 = [ I
t2 x2
A ]U n
La matrice diteration C est cette fois egale a :
C = ( I + t
2 x2A)1( I
t2 x2
A)
Ses valeurs propres sont :
k =1
t2 x2
k
1 + t
2 x2 k
Elles sont donc de module inferieur a 1 pour tout k. Ce qui
entrane la stabilite
inconditionnelle (quels que soient t et x) du schema de Crank
Nicolson.Remarque 9.4.2 Attention, la stabilite en norme
euclidienne ( L2), consideree ici, nassure pas la monotonie ou la
positivite du schema. La decroissance en norme L2 nimplique pas la
decroissance de chaque composante du vecteur solu-tion.
La methode precedente se complique dans le cas de schemas ` a
plusieurs pas, nousallons presenter ci-dessous une technique de
calcul plus simple et adaptable aucas de schemas multipas.
-
7/28/2019 Poly Chaleur
16/24
240
9.4.7Etude de la stabilite par lanalyse de Fourier
Une technique simple de calcul de la stabilite dun schema est
donnee dans lecas de problemes lineaires par lanalyse de Fourier.
Rappelons lanalyse presenteeau paragraphe 9.2.3. Nous avions
exprime la solution u de lequation de la chaleur
t
u(x, t ) = 2
x 2u(x, t ) x[0, L ] et t[0, T ]
u(x, 0) = u0(x) donnee : condition initiale
u(0, t ) = u(L, t ) = 0 : conditions aux limites de Dirichlet
homogenes
sous la forme du developpement :
u(x, t ) =kZ
u k (t)sin (kL
x)
En utilisant de nouveau la linearite du probleme et le principe
de superposition,nous observons que la solution, dans le cas de
conditions aux limites lineairesquelconques, Dirichlet, Neumann,
Fourier ou periodiques secrit sous la formegenerale :
u(x, t ) =k
Z
uk (t)eikx
ou k est un coefficient reel integrant le nombre donde, le type
de conditions auxlimites et la dimension du domaine. Les
coefficients de Fourier uk verient chacunune equation
differentielle en temps dont la solution secrit :
u k (t) = uk (0) exp (k2 t)On a donc
uk (t + t) = exp (k2 t) uk (t)Faisons la meme analyse dans le
cas discret. Injectons dans le schema numeriqueune suite de
solutions de la forme
un j = unk e
ikj x
Ces solutions ont pour conditions initiales
u0 j = u0k eikj x
et correspondent chacune `a une composante harmonique. Letude de
la stabilitese ramene a letude de levolution au cours des pas de
temps n des suites unkquand n augmente. La condition minimale de
stabilite numerique necessite que
-
7/28/2019 Poly Chaleur
17/24
241
les nombres u nk
restent bornes
k et
n = 0 , ...N . Si lon veut de plus decroissancede la solution
approchee, on devra avoir decroissance des unk quand n
augmente.
Dans les schemas a p pas, on obtient les u n +1k par
multiplication par une matricedamplication G( t, k ) selon :
un +1kunk::
un p+2k
= G( t, k )
unkun 1k
::
un p+1k
Dans les schemas a un pas, la matrice damplication se reduit ` a
un facteurdamplication G( t, k ) tel que un +1k = G k ( t) u nk
.
Nous obtenons alors les conditions de stabilite suivantes :
Condition necessaire de stabilite de Von Neumann
Pour que le schema soit stable, il faut quil existe > 0 tel
que les valeurs propres i de la matrice damplication G( t, k )
soient toutes majorees en module selon :
| i | 1 + c t i = 1 , ..pavec c > 0, quel que soit k et pour
tout 0 < t <
Dans le cas de schema a un pas la matrice damplication se reduit
` a un facteurscalaire et la condition de Von Neuman est
suffisante.
Conditions suffisantes de stabilite
1) Si la matrice damplication est normale, cest a dire quelle
commute avec sonadjointe (ou transposee dans le cas reel)
G G= GG
ou bien, ce qui est equivalent, si elle admet une base de
vecteurs propresorthonormes, alors la condition de Von Neumann est
suffisante.
2) La condition precedente etant parfois difficile ` a verier,
on peut utiliser lacondition suffisante suivante : le schema est
stable si les coefficients de la matriceG( t, k ) sont bornes et si
ses valeurs propres sont toutes de module strictementinferieur a 1
sauf eventuellement une de module egal `a 1.
-
7/28/2019 Poly Chaleur
18/24
242
Un premier exemple simple dapplication : le schema dEuler
Posonsun j = u
nk e
ikj x
et calculons le facteur damplication G k ( t) tel que u n +1k =
G k ( t) unk . Onobtient :
un +1k unk t
exp (ikj x) =exp (ik x) 2 + exp (ik x)
x2exp (ikj x) unk
soit :
u n +1k = [1 + t
x2 (2 cos (k x)
2] u nk = [ 1
4
t
x2 sin
2(k
2 x) ] u nk
La condition |G k ( t )| 1 k necessite t
x2 12
. On retrouve evidemment descalculs analogues et le meme
resultat que par lanalyse matricielle faite plus haut.
Un exemple simple de schema implicite a 2 pas : le schema de
Gear
Considerons le schema suivant pour lequation de la chaleur
monodimensionnelle :32
u n +1 j 2u n j +12
un 1 j = t
x2[u n +1 j +1 2un +1 j + u n +1 j 1 ]
Posons comme precedemment
un j = unk e
ikj x
Un calcul simple conduit au resultat suivant
un +1kunk
=2a
1a
1 0
unkun 1k
avec a =32
+ 4 t
x2sin 2(
k2
x)
Les valeurs propres de la matrice 2
2 damplication ci-dessus sont racines de
2 2a
+1
2a= 0
On trouve le discriminant = 2 a2a2
. On obtient si a > 2 deux racines complexes
conjuguees de module 12a < 1 et dans le cas a 2 deux racines
reelles dont laplus grande en valeur absolue vaut
1a
+ 2 a2a2 < 1
-
7/28/2019 Poly Chaleur
19/24
243
On a donc stabilite inconditionnelle de ce schema qui se revele
dans la pratiqueparticulierement adapte dans le cas dequations
raides, cest ` a dire danslesquelles on aurait de fortes variations
locales des constantes thermiques.
9.5 Methodes delements nis pour le problemede la chaleur
On considere le probleme bidimensionnel suivant :
tu(x,y, t ) = u(x,y, t ) + f (x,y, t )
x, y
et t
[0, T ]
u(x,y, 0) = u0(x, y ) donnee : condition initiale
u | 0 = ud : conditions aux limites de Dirichletun | 1
= g : conditions aux limites de Neumann
Formulation variationnelle
La formulation variationnelle du probleme sobtient comme dans le
cas station-naire par multiplication par des fonctions tests
independantes du temps apparte-nant, compte tenu des conditions aux
limites choisies, ` a lespace V des fonctions deH 1() nulles sur 0.
Apres integration en espace sur le domaine et integrationpar
parties par la formule de Green, on obtient le probleme
variationnel :
Trouver pour tout t[0, T ], u : (x,y, t ) u(x,y, t ) telle que
:
t u(x,y, t ) v(x, y ) dxdy + grad u grad v dxdy=
f (x,y, t ) v(x, y ) dxdy +
1
g v d
v
V
u(x,y, 0) = u0(x, y ) donnee
9.5.1 Semi-discretisation en espace par elements nisOn suppose
realise un maillage du domaine en elements nis triangulaires P kou
quadrangulaires Q k . Soient wi les fonctions de base associees aux
elementsnis choisis. Le maillage est pris xe au cours du temps
(voir au chapitre 12une situation dans laquelle le domaine est
deformable et donc le maillage change
-
7/28/2019 Poly Chaleur
20/24
244
au cours du temps). Les fonctions de base wi sont donc
independantes du temps.Notons I lensemble des indices des noeuds du
maillage correspondant a une valeurinconnue de la solution u . Cest
a dire ici lensemble des noeuds nappartenantpas a 0. Notons J
lensemble des indices des sommets du maillage correspondanta une
valeur connue de la solution, donc ici appartenant ` a 0.
Comme dans le cas stationnaire nous decomposerons la solution
approchee uhen somme dune inconnue auxiliaire u h et dune fonction
connue u0 prenant lesvaleurs imposees sur 0. La solution auxiliaire
u h secrira dans la base des wi pouriI selon : uh (x,y, t ) =
i
I
u i (t) wi (x, y )
La fonction u0, supposee independante du temps pour simplier,
sera approcheepar une fonction u0,h prenant les valeurs imposees
sur 0 et nulle sur tous lesnoeuds dindices iI
u0,h (x, y ) =i
J
ud (x i , yi ) wi (x, y )
On en deduit
tuh (x,y, t ) =
i
I
u i (t) wi (x, y )
Notons N I le nombre de noeuds inconnus dindices iI . Le
probleme approchesecrit sous la forme dun systeme differentiel
lineaire de N I equations `a N Ifonctions inconnues du temps u i
.
Trouver t[0, T ], et j I , les fonctions u j (t) telles que, iI
:
jI w j wi dxdy u j (t) + grad w j grad wi dxdy u j (t) =
f w i dxdy + 1 g wi d jJ grad w j grad wi dxdy u d(x j , y j )u
i (0) = u i, 0 donnes iI
Ce qui donne matriciellement :
Trouver pour tout t[0, T ], le vecteur U (t) tel que :
MU (t) + KU (t) = BU (0) = U 0 donne
-
7/28/2019 Poly Chaleur
21/24
245
avec M matrice de masse de coefficients
m i,j = w j wi dxdyK matrice de raideur de coefficients
ki,j = grad w j grad wi dxdyet B vecteur second membre dont les
coefficients sont dans ce cas egaux a
B i = f (x,y, t ) wi dxdy + 1 g wi d jJ ki,j u d (x j , y j
)9.5.2 Discretisation complete en espace et en tempsIl nous reste a
appliquer les schemas en temps dej` a presentes dans le cas
dediscretisations en differences nies pour obtenir une
discretisation complete duprobleme.
Schema dEuler explicite
On utilise lapproximation
U (t) U (t + t) U (t)
t
ce qui conduit au schema
Trouver pour tout n[0, N ], la suite de vecteurs U n tels que
:
U 0 donne : ( U 0i = u0(x i , y i ) )
MU n +1 = MU n
tKU n + tB
Remarquons que la dependance du second membre B par rapport au
temps neposerait pas de probleme difficile.
La resolution complete du probleme approche necessite la
resolution dun systemematriciel a chaque pas de temps. Nous avons
deux possibilites :
1) On factorise une fois pour toute en debut de calcul la
matrice de masseM qui est symetrique denie positive sous forme LL T
et on a deux systemestriangulaires a resoudre a chaque pas de
temps.
-
7/28/2019 Poly Chaleur
22/24
246
2) On calcule la matrice de masse de facon approchee sous forme
dune matricede masse condensee diagonale (mass lumping). Linversion
de la matrice de masseest alors immediate et on obtient
veritablement un schema numerique explicite.
Malheureusement le schema dEuler explicite dont la stabilite
depend dunecondition tres severe sur le pas de temps nest pas
adapte ` a lequation de lachaleur. On preferera utiliser les
schemas implicites suivants.
Schema dEuler implicite
On utilise lapproximation
U (t) U (t) U (t t) tce qui conduit au schema
Trouver pour tout n[0, N ], la suite de vecteurs U n tels que
:
U 0 donne : ( U 0i = u0(x i , y i ) )
MU n +1 = MU n tKU n +1 + tBSoit
[M + tK ]U n +1
= MU n
+ tBDans ce cas, que lon ait ou non condense la matrice de masse
sous formediagonale, on doit resoudre un systeme matriciel. Ce que
lon fait en factorisantune fois pour toutes au debut du calcul, la
matrice M + tK qui est symetriquedenie positive, sous forme LL T
puis en resolvant `a chaque pas deux systemestriangulaires.
Schema de Crank-Nicolson
Le schema secrit
Trouver pour tout n[0, N ], la suite de vecteurs U n tels que
:
U 0 donne : ( U 0i = u0(x i , y i ) )
MU n +1 = MU n t2
K [U n + U n +1 ] + tB
Soit[M +
t2
K ]U n +1 = [M t2
K ]U n + tB
Il est facile de montrer, en reprenant lanalyse matricielle
faite en 9.4.6, la stabiliteinconditionnelle de ce schema.
-
7/28/2019 Poly Chaleur
23/24
247
Schema de Gear
Dans les cas difficiles, en particulier le cas dequations
raides, si lon veutlordre deux de precision, on utilisera le schema
`a deux pas implicite suivant, ditschema de Gear :
Trouver pour tout n[0, N ], la suite de vecteurs U n tels que
:
U 0et U 1 donnes32
MU n +1 = 2 MU n 12
MU n 1 t KU n +1 + tBSoit
[32
M + tK ]U n +1 = 2 MU n 12
MU n 1 + tB
Ce schema, inconditionnellement stable et du second ordre en
temps, necessite audemarrage lutilisation dun schema ` a un pas
(Crank-Nicolson an de conserverlordre 2) pour le calcul de U 1. Les
schemas de Runge et Kutta implicites sontun autre choix possible de
schemas dordre eleve stables avec lavantage pratiquedetre des
schemas `a un pas.
-
7/28/2019 Poly Chaleur
24/24
248