-
Lart de programmerson petit copeau
de silicium
Quatrime anne DGEI INSA / release 2010c
Automne 2010
-
Table des matires
1 On en tient une couche 51.1 Introduction et dfinitions . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51.2
Architecture logicielle recommande . . . . . . . . . . . . . . . .
. . . . . . . . . . . 51.3 Guide des bonnes manires . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . 61.4 La couche
matrielle . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . 7
2 Faudrait pas prendre les pilotes pour des navigateurs ! 82.1
Premier exemple : configuration dune broche dentre-sortie . . . . .
. . . . . . . . . 8
2.1.1 Pilote dynamique . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . 82.1.2 Pilote statique . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.2 Second exemple : configuration dune interruption . . . . . .
. . . . . . . . . . . . . . 122.2.1 Pilote dynamique . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . 122.2.2
Pilote statique . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . 12
3 Bah ! Les masques 153.1 Oprateur logiques et bit bit . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . 163.2 Mettre un
bit 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . 173.3 Mettre un bit 0 . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . 173.4 Inverser un bit .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . 183.5 Initialiser une tranche de bits . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . 18
4 Lpointeur de fonctions ne manque(nt) pas de piquant ! 204.1
Appel indirect des fonctions . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . 20
4.1.1 Pointeur de fonction . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . 204.1.2 Affectation dun pointeur de
fonction . . . . . . . . . . . . . . . . . . . . . . . 204.1.3
Appel de fonction par un pointeur . . . . . . . . . . . . . . . . .
. . . . . . . 204.1.4 Passage de fonctions en paramtre . . . . . .
. . . . . . . . . . . . . . . . . . 21
4.2 Lart et la manire... . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . 224.2.1 ... de sen servir avec la
solution dynamique . . . . . . . . . . . . . . . . . . . 224.2.2
... de sen passer avec la solution statique . . . . . . . . . . . .
. . . . . . . . 234.2.3 Quelques commentaires pour se faire une
religion . . . . . . . . . . . . . . . . 23
5 Une mise au point simpose ! 255.1 Les points darrts et les
espions . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
25
5.1.1 Les diffrents points darrts . . . . . . . . . . . . . . .
. . . . . . . . . . . . . 25
2
-
5.1.2 Pose dun point darrt . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . 265.2 Emulation avance . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . 27
5.2.1 Contrle de lexcution . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . 275.2.2 Simulation de lactivit des broches
du STM32 . . . . . . . . . . . . . . . . . 30
-
Chap 1: On en tient une couche
1.1 Introduction et dfinitions
Un pilote informatique (ou plus connu sous langlicisme driver )
est un programme infor-matique qui permet un autre programme
dinteragir avec un priphrique. En gnral, chaquepriphrique a son
propre pilote.
Pour assurer la qualit dune application, il est ncessaire de
bien concevoir les pilotes et leur re-lation avec lapplication.
Petit rappel : en informatique, la qualit dsigne un ensemble
dindicateurspour offrir une apprciation globale dun logiciel. Elle
se base sur : la compltude des fonctionnali-ts, la prcision des
rsultats, la fiabilit, la tolrance aux pannes, la facilit et la
flexibilit de sonutilisation, la simplicit, lextensibilit, etc.
Parmi ces critres, le nologisme portabilit dsigne, pour un
programme informatique, sa ca-pacit fonctionner dans diffrents
environnements dexcution, en particulier diffrents environne-ments
matriels. A cela sajoute ladaptabilit qui est souvent utilis pour
dsigner la qualit dunlogiciel qui peut tre modifi aisment en
harmonie avec les changements auxquels son utilisationpeut tre
soumise.
La portabilit et ladaptabilit dune application ncessite davoir
une architecture logiciellesolide. Celle-ci dfinit lorganisation
interne dun logiciel, son dcoupage en couches et en modules,ainsi
que les responsabilits de chaque module et la nature et la
structure des relations entre modules.
Les relations entres les modules sont fournies via une interface
de programmation (ApplicationProgramming Interface ou API ). Elle
permet linteraction des programmes les uns avec les autres.Du point
de vue technique une API est un ensemble de fonctions, procdures ou
classes mises disposition par une bibliothque logicielle, un systme
dexploitation ou un service. La connaissancedes API est
indispensable linteroprabilit entre les composants logiciels.
Dans le cas typique dune bibliothque, il sagit gnralement de
fonctions considres commeutiles pour dautres composants. Une
interface en tant que telle est quelque chose dabstrait ;
lescomposants ralisant celle-ci tant des mises en uvre (ou
implmentation). Idalement il peut yavoir plusieurs mises en uvre
pour une mme interface. Par exemple, sous UNIX, la libc dfinitdes
fonctions de base utilises par pratiquement tous les programmes et
est fournie par des misesen uvre propritaires ou libres, sous
diffrents systmes dexploitation.
1.2 Architecture logicielle recommande
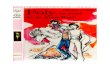
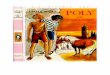
Pour en revenir nos moutons lectroniques, nous prconisons pour
les TP de priphriques unearchitecture logicielle en trois couches
(voir figure 1.1).
Les diffrentes couches sont : La couche application : Cette
couche ne comporte que du code ddi une application.
Elle comporte lensemble des fonctions de traitement et
dorchestration de lapplication. La couche de services applicatifs :
Cette couche un ensemble de fonctions qui masquent les
priphriques matriels au niveau de lapplication pour en offrir
une reprsentation abstraite.
5
-
module ADC
couche application
couche services applicatifs
couche pilotesmodule PWM
module IO
module Timers...
module vitesse
module position
module comm.
modulesuper-vision...
application
Figure 1.1 Architecture logicielle
Par exemple, le service dacquisition dune vitesse masque lappel
au priphrique ADC pouroffrir une vision purement abstraite de la
variable de vitesse.
La couche de pilotes : Cette couche ne comporte que du code li
la configuration etlutilisation des priphriques sans prsuppos une
utilisation particulire par une application.
Une telle architecture offre de nombreux avantages : Seules les
couches services applicatifs et pilotes doivent changer si le
matriel volue,
la couche application nayant a priori besoin que de quelques
modifications pour prendre enconsidration les nouvelles capacits du
support dexcution (surtout en ce qui concerne letemps).
Les modules qui composent la couche pilotes peuvent tre utilises
pour diffrentes applicationset ainsi offrir des composants pris sur
tagres.
La couche services applicatifs fournit des services gnriques
pour un mme ensemble defamilles dapplications sans avoir besoin
dtre rcrit chaque dveloppement ou volutiondune application sur le
mme support.
Le test des modules est fait de manire unitaire, ce qui facilite
le dbogage sans avoir besoinde chercher la petite bte.
Les lments qui composent une couche ne peuvent communiquer
quavec un lment dunecouche infrieure et cela se fait uniquement
travers les API des diffrentes modules.
1.3 Guide des bonnes manires
Chaque module est associ deux fichiers, lun comportant le code
(.c) et lautre dfinissant sonAPI (.h). Seul les fonctions dclares
dans le ficher den-tte sont accessibles aux autres
lmentslogiciels.
Comme le fichier den-tte est le seul lment utilisable (lisible /
modifiable) par un utilisateurexterne au module, il est capital de
bien le commenter. Le commentaire est considr comme un
6
-
mode demploi du module. Ceci est dautant plus vrai, que les
constructeurs de micro-contrleursproposent des modules (ou
bibliothques) au format .lib ou .o. Ces derniers sont compils donc
defait, non modifiables.
Afin dassurer la portabilit des modules de la couche pilotes, il
est interdit quune des fonctionsdun module utilisent une variable
globale au projet. Si on veut utiliser une variable globale
auprojet, dans la couches service ou application, cela peut se
faire par le biais dun fichier denttepartag, par exemple, global.h.
Ceci tant, cest fortement dconseill.
Quelques rgles sont spcifiques aux couches : Couche
application
Le main() est contenu dans la couche application et ne peut
faire appel qu des fonctionsde la couche services.
Aucune rfrence des priphriques nest fait au niveau de la couche
application. Couche services applicatifs
Le code des modules de la couches services contient des
fonctions directements lies lap-plication : les noms de fonctions
et de variables font explicitement rfrence lapplication.
Les fonctions au niveau services appellent uniquement des
fonctions de niveau pilotes. Ellesne sappellent pas entre elles.
Dit autrement, elles ne peuvent inclure que des fichiers deniveau
pilote.
Les fichiers sont organiss par domaine li lapplication Couche
pilotes
La couche pilotes ne contient que les fonctions qui concernent
directement les priphriques. Les noms des fonctions doivent voquer
les priphriques. Les fonctions ne font pas rfrence lapplication et
doivent tre dfinie de manire ind-
pendante toute application.
1.4 La couche matrielle
Le logiciel, et dans notre cas la couche pilote, est excut sur
le coeur du processeur et doitcommuniquer avec les priphriques. Les
priphriques sont des circuits, essentiellement de llec-tronique
numrique, prsents sur la puce qui fournissent des fonctions
dinterface avec le matrielsur lequel la puce est embarque. Ces
circuits ne sont pas programmables comme le coeur : ils nepeuvent
pas excuter des lignes de programmes. Par contre, on peut les
configurer, c--d. modifierun paramtre de son fonctionnement, o
transfrer des donnes avec le coeur du processeur.
TODO SCHEMA REGISTRE GPIOA_ODRSi lon crit une valeur ladresse
XXX, avec la ligne *(0x8000123)=13 en langage C qui
sera traduite par exemple par ldr R0,=0x8000123 ; ldr R1,=13;
str R1,[R0] en assembleur, lecoeur va positionner la valeur
0x8000123 sur le bus dadresse, la valeur 13 sur le bus de donne,
laligne R/W 0 pour write et attendre un front dhorloge actif.
TODO finir tout a
7
-
Chap 2: Faudrait pas prendre lespilotes pour des navigateurs
!
Lors de limplmentation dun pilote plusieurs possibilits sont
offertes en particulier pour toutce qui est li la
configuration.
2.1 Premier exemple : configuration dune broche
dentre-sortie
Prenons lexemple de la configuration dun port dentre-sortie. Au
cour de la conception lafonction Pin_IO_Init(State, Port,
Pin_Number) est dcrite comme permettant au pin numroPin_Number du
port Port dtre configurer dans ltat State.
Au niveau implmentation cela peut se traduire de deux manires :
soit dynamiquement, cest--dire que cest lexcution que la
configuration sera faite, soit statiquement, cest--dire que
laconfiguration sera faite la compilation. Ces deux stratgies
ncessitent alors une implmentationdiffrente.
2.1.1 Pilote dynamique
Dans le cas dynamique, lAPI du pilote fournit lapplication une
fonction de configuration, parexemple lAPI ./pilotes/GPIO_dyn.h du
listing 2.1 et son implmentation dans ./pilotes/GPIO_dyn.c
// Port c on f i g u r a t i on func t i onvoid Pin_IO_Init
(char State , GPIO_TypeDef Port , int Pin_Number) ;// S ta t e shou
ld be i f o r INPUT, o f o r OUTPUT// Port po in t e r to GPIO s t
r u c t u r e de f ined in stm_regs . h : GPIOA, . . .// Pin_Number
: as i t says . . .// Example :// Pin_IO_Init ( o ,GPIOD,3 ) ; s e
t por t D pin number 3 as an output
Listing 2.1 ./pilotes/GPIO_dyn.h : lAPI du pilote dynamique
(listing 2.2) permet de rgler les registre du Port voulus en
fonction de State et Pin_Number.La configuration dune broche se
fera par un appel de lapplication (couche application ou
service)
en passant les paramtres souhaits la fonction Pin_IO_Init. Dans
lexemple du listing 2.3, onrgle la broche 2 du port GPIOA en
entre.
Les fonctions de configurations sont donc crites dans le fichier
.c, par exemple ./pilotes/GPIO_dyn.cet on donne accs aux couches
suprieures (service et application) via une API dument commen-te,
par exemple ./pilotes/GPIO_dyn.h. Larborescence des fichiers
conseille, voir fig. 2.1, permetainsi de rutiliser le pilote dans
plusieurs projets sans faire de copie multiple de ces fichiers.
8
-
void Pin_IO_Init (char State , GPIO_TypeDef Port , int
Pin_Number){
i f ( State== i ){// input por t
// r e s e t mode [ 0 : 1 ] to 00 = f l o a t i n g inpu
tPort>CRL &= ~(3
-
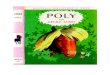
Figure 2.1 Arborescence o le rpertoire pilotes est aumme niveau
que celui des projets. Plusieurs projets peuventdonc inclure le mme
pilote en donnant le chemin relatif vers le.h
(../../pilotes/GPIO_stat.h). Chaque applicatif de
projet(Test_GPIO.c) configure son pilote en passant les
paramtreslors d elappel de la fonction dinitialisation. Dans le cas
de pi-lote statique, le fichier de configuration GPIO_stat_conf.h
estplac dans le projet car la configuration dpend de lapplicationet
ne peut tre la mme.
2.1.2 Pilote statique
Dans le cas statique, la configuration se fait directement dans
un fichier de configuration, parexemple
./projet/exemple/GPIO_stat_conf.h, appartenant au projet. Dans ce
fichier de configu-ration, lutilisateur va commenter ou dcommenter
des directives #define ... :
//CONF : i f you want to use GPIOA por t then// uncomment the f
o l l ow i n g l i n e#define GPIOA_IS_USED
// CONF : by d e f a u l t a l l po r t s are inpu t s// to s e
t a por t to output add l i n e s in the format// #undef P_// #de f
i n e P_ IS_OUTPUT// Example : PB_3 f o r t pin number 3 o f
GPIOB#undef PA_2#define PA_2 IS_OUTPUT
Listing 2.4 ./projet/exemple/GPIO_stat_conf.h : configuration
via des directive de compilation
Le fichier de configuration est inclus par le fichier source,
par exemple ./pilotes/GPIO_stat.c,ce qui va influencer sa
compilation et ainsi intgrer les configurations :
Lapplication, quand elle, ne fait quappeler une fonction
dinitialisation sans paramtres :Dans cet exemple la simplicit nest
pas en faveur de la version statique, cependant le code
10
-
#define IS_INPUT 0x0#define IS_OUTPUT 0x3
#define PA_0 IS_INPUT#define PA_1 IS_INPUT#define PA_2 IS_INPUT.
. .
#include "GPIO_stat_conf . h"// path to the conf f i l e shou ld
be s e t in compi ler op t i ons// Now PA_x are con f i gured by
user
void GPIO_Init (void ){
#i f d e f GPIOA_IS_USED// cons t ruc t the i n i t from the
PA_x con f i guredGPIOA>CRL = (PA_0
-
produit statiquement est beaucoup moins coteux en terme de
mmoire, car il ne compilera lesfonctions de configuration que si
des ports sont utiliss.
2.2 Second exemple : configuration dune interruption
Les interruptions peuvent permettre dexcuter une fonction lie
lapplication suite un v-nement matriel. Il y a donc dun ct la
fonction qui appartient la couche applicative et de
lautrelinterruption capturer au niveau de la couche pilotes. Lors
de la configuration du systme il fauttre capable de faire le lien
entre ces deux lments...
2.2.1 Pilote dynamique
Dans sa version dynamique, cela revient prototyper une fonction
dans le pilote du priphriquequi permet de faire le lien entre la
fonction et une interruption du priphrique. Supposons que
nousvoulons excuter la fonction Gazabeuh(void) lors de
linterruption provoque par le priphriqueXXX.
Le pilote de XXX comportera une fonction Init_IT_XXX(void (*
IT_fonction) (void)) quipermettra de lier linterruption de XXX la
fonction IT_fonction.
void (pt_IT_Hook) (void ) ; // Pointeur de f onc t i on pour l
IT
void Init_IT_XXX(void ( IT_fonction ) (void ) ){
pt_IT_Hook = IT_fonction ;. . . // Act i ver l i n t e r r u p t
i o n
}. . .
Listing 2.7 ./pilotes/Pilote_XXX.c : configuration dune
interruption
Le handler de linterruption est alors dfini dans la suite de
manire gnrique par la codesuivant :
Au niveau applicatif la configuration du priphrique se fera grce
au code suivant :Bien sr la fonction de configuration de
linterruption pourrait tre plus volue, par exemple
en fixant le niveau de linterruption etc.
2.2.2 Pilote statique
Dans le cas dun pilote statique la solution est plus simple
implmenter. Il suffit de faire unfichier de configuration :
Le source du pilote utilise la directive #ifdef pour insrer ou
non lappel de la fonction lors delinterruption
Remarquez que dans cet exemple, la version statique va gnrer
uniquement un Handler videalors que la version dynamique gnre un
Handler avec 4 lignes de code, plus une fonction dini-tialisation
(1 ligne) et son appel du main (1 ligne). Vous comprenez maintenant
la compacit de laversion statique mais malheureusement aussi sa
complexit...
12
-
. . .void XXX_IRQHandler void // Handler de l IT de XXX{
i f ( ( int ) pt_IT_Hook != 0){
(pt_IT_Hook) ( ) ; // Appel l a f onc t i on}
elsewhile (1 ) ; // bouc l e i n f i n i . . Le hand ler n e s t
pas con f i gu
// mais i l e s t dangereux de f a i r e n importe quoi}
Listing 2.8 ./pilotes/Pilote_XXX.c : handler dune interruption
en dynamique
#include " . . / . . / . . / p i l o t e s /Pilotes_XXX . h". .
.void main (void ) // Handler de l IT de XXX{
Init_Clock ( ) ;Init_GPIO ( ) ;Init_IT_XXX(&Gazabeuh ) ;
}
void Gazabeuh (void ){
// Code excu t e r pendant l i n t e r r u p t i o n}. . .
Listing 2.9 ./projet/ex_it/main.c : Exemple de configuration
dune interruption en dynamique
// CONFIGURATION PART// p l e a s e uncomment i f you wich to
launch a func t i on on IT// #de f i n e THERE_IS_A_HOOK_ON_IT#ifde
f THERE_IS_A_HOOK_ON_IT
// CONFIGURE here the func t i on pro to t ypevoid Gazabeuh
(void ) ;//CONFIGURE here the c a l l to the hook func t i on#de f
i n e IT_HOOK_CALL Gazabeuh ( )
#endif
Listing 2.10 ./projet/exemple/Pilote_XXX_conf.h : configuration
via des directives decompilation
13
-
#include "Pilote_XXX_conf . h"// path to the conf f i l e shou
ld be s e t in compi ler op t i ons
void XXX_IRQHandler void // Handler de l IT de XXX{
#i f d e f THERE_IS_A_HOOK_ON_ITIT_HOOK_CALL;
#elsewhile (1 ) ; // bouc l e i n f i n i . . Le hand ler n e s
t pas
con f i gu// mais i l e s t dangereux de f a i r e n importe
quoi
#end. . .
}
Listing 2.11 ./pilotes/Pilote_XXX.c : handler dIT utilisant les
directives de compilation
vous de choisir...
14
-
Chap 3: Bah ! Les masques
Pour programmer un priphrique il est ncessaire daller modifier
un ou plusieurs bits dans unregistre sans modifier les autres. Par
exemple le registre ADC_CR1 sert configurer le
convertisseuranalogiquenumrique ADC1 :
Figure 3.1 Extrait du reference manual du STM32 p. 236, la suite
dcrit la fonction de chaquebit, comme SCAN et AWDIE et la
signification des valeurs de chaque tranches de bit tels que
DISCNUM
Pour cela on utilise les masques logiques et certaines astuces
pour construire un masque claire-ment sans risquer de se tromper.
Dans lexemple suivant le bit SCAN de ADC_CR1 est mis 1 et lebit
EOCIE est mis 0 sans toucher aux autres bits. Les registres
ADC1_CR2, ADC1_SQR1, ADC1_SQR3sont aussi manipuls avec des masques
:
ADC1>CR1 |= (ADC_SCAN) ; // cont inuous scan o f channe l s 1
,14 ,15
ADC1>CR1 &= ~(ADC_EOCIE) ; // pas d i n t e r r u p t i o
n de f i n de conv .
ADC1>CR2 |= (ADC_EXTSEL_ON_SWSTART | ADC_ CONT | ADC_DMA) ;//
EXTSEL = SWSTART// use data a l i g n r i g h t , cont inuous
convers ion// send DMA reque s t
// conver t sequence i s channel 1 then 14 then 15ADC1>SQR3
|= (1
-
Si vous avez aucune ide de comment ce code fonc-tionne cest que
vous ne maitrisez pas encore lartprimitif du masque : lisezdonc la
suite.Cicontre, un masque primitif (on prfre diredart premier)
dorigine Gabonaise.
3.1 Oprateur logiques et bit bit
On utilise les oprateurs logiques ET, OU, XOR (OU exclusif) et
NOT entre un registre et unmasque pour manipuler les bits. Les
oprateurs logiques et leurs syntaxe en langage C sont rsumsdans le
tableau suivant :
Fonction logique Oprateur logique Oprateur bit bitET &&
&OU || |XOR aucun NON !
Loprateur logique considre les oprandes (quelle soient 8/16/32
bit) comme une valeur boo-lenne fausse si tous les bits sont nuls
et vrai sinon. Elle fournit un rsultat boolen nul si cestfaux et
diffrent de zro (en gnral la valeur 1) sinon. Ne confondez donc pas
loprateur logiqueavec loprateur bit bit qui effectue 8/16/32
oprations logiques entre chaque bits respectifs desoprandes, par
exemple :
a = 2 ; // s o i t b00000010 en b i na i r e e s t v r a i car d
i f f r e n t de 0b = 1 ; // s o i t b00000001 en b i na i r e e s
t v r a i au s s iy = a && b ; // donne 1( v ra i ) car a
ET b e s t v r a iz = a & b ; // donne b00000000 car chaque ET
des b i t s de a e t b sont
faux
16
-
3.2 Mettre un bit 1
Pour cela on utilise loprateur OU avec une valeur binaire,
appele masque, ayant des bits 1uniquement devant les bits que lon
veut initialiser :
b7 b6 b5 b4 b3 b2 b1 b0
OU 0 0 0 1 0 0 1 1
= b7 b6 b5 1 b3 b2 1 1
car x OU 1 = 1 et x OU 0 = x
Ainsi les bits b4, b1 et b0 sont passs 1 sans modifier la valeur
des autres bits.Pour effectuer cela en langage C on doit calculer
la valeur du masque binaire : convertir
b00010011 en hexadcimal (0x13) ou en dcimal (19) car le langage
C nadmet pas de littrauxen binaire.
char av o i l e ;. . .// fo rmu la t i ons q u i v a l e n t e
sav o i l e = avo i l e | 0x13 ; // opra teur | i n l i n eav o i l
e |= 0x13 ; // opra teur | p r f i x =av o i l e |= 19 ; // va l eu
r du masque en dcimal
Il nest pas trs vident de comprendre que 0x13 ou 19 correspond
un masque visant les bitsde rang 0,1 et 4, de plus il est trs
facile de se tromper lorsque lon fait la conversion soimme. Ungeek
utilisera loprateur de dcalage gauche
-
Ainsi les bits b4, b1 et b0 sont passs 0 sans modifier la valeur
des autres bits.Pour construire le masque, on peut toujours
effectuer la conversion soit-mme avec un risque
derreur : b11101100 = 0xEC = 236. On peut aussi construire le
masque avec des 1 devant les bits annuler et ensuite inverser
chaque bit avec loprateur .
(1
-
recopier les 1 du premier masque dans avoile avec un OU :
num n7 n6 n5 n4 n3 n2 n1 n00x7 0 0 0 0 0 1 1 1
(num&0x7) 0 0 0 0 0 n2 n1 n0(num&0x7)
-
Chap 4: Lpointeur de fonctionsne manque(nt) pas de piquant !
4.1 Appel indirect des fonctions
Extraits de : T. Monteil et al., Du langage C au C++, Presses
Universitaires du Mirail, 2009.
De la mme manire que le nom dun tableau reprsente ladresse
dimplantation de ce tableau(cest--dire ladresse de son premier
lment), le nom dune fonction (sans parenthses) reprsenteladresse de
cette fonction, plus exactement ladresse de son point dentre. Cette
adresse peut tre :
attribu un pointeur (pointeur de fonction), ce qui permet lappel
indirect de cette fonction, transmise comme paramtre dautres
fonctions, place dans un tableau de pointeurs de fonction.
4.1.1 Pointeur de fonction
Un pointeur de fonction est une variable pouvant recevoir
ladresse dune fonction. Dans ladclaration du pointeur, cette
fonction est type, si bien quil ne peut ensuite accepter de
recevoir queladresse dune fonction de mme type. Voici la forme
gnrale de la dclaration dun tel pointeur :
type ( * ptrFct ) (type, type, ...);
Les parenthses de gauche sont obligatoires, sinon il sagirait
dune fonction retournant unpointeur.
4.1.2 Affectation dun pointeur de fonction
Voici comment on affecte ladresse dune fonction un pointeur
:
double ( * Math ) ( int, int, double ) ; /* Pointeur de fonction
*/double Racine ( int, int, double ) ; /* Fonction */
Math = Racine ; /* Affectation */
4.1.3 Appel de fonction par un pointeur
Ds quun pointeur reu ladresse dune fonction, on peut appeler
celle-ci indirectement selonla forme gnrale suivante :
/* dfinition dun pointeur */type ( * ptrFcn ) (type, type,
...);
20
-
/* dclaration dune fonction de mme type renvoy */type Fonc
(type, type, ...);
/* affectation du pointeur */ptdFcn = Fonc;
/* appel indirect de Fonc() */(*ptrFcn) (arguments);
Dans le cas prsent, les deux instructions ci-dessus sont bien
quivalentes un appel direct deFonc() puisque *ptrFcn a pour valeur
Fonc.
4.1.4 Passage de fonctions en paramtre
Il est possible de transmettre une fonction en paramtre dune
fonction appelante. Celle-ci em-ploie le nom de la fonction appele
sans parenthses ni arguments la suite. Cest donc ladressedu point
de lancement de cette fonction qui est empile. Pareillement, on
peut transmettre indirec-tement une fonction en paramtre grce un
pointeur sur cette fonction. Dans lexemple qui suit,Fonction() est
appele deux fois avec deux (adresses de) fonctions diffrentes
passes en argument,et une fois avec un pointeur de fonction :
int Premiere (void) ;int Seconde (void) ;int ( * pFonction ) ()
= Seconde ;
void Fonction (int (* ptrFoncArg) (), int Un , int deux ){/*
Corps de Fonction () */}/* exemple dappels
*//************************************************************************************//*
Appel directement avec ladresse de la fonction Premier et les
entiers 12 et -45 */Fonction ( Premiere, 12, -45);
/************************************************************************************//*
Appel avec ladresse de la fonction Premier et les entiers 0 et 0
*/Fonction ( Seconde, 0, 0);
/************************************************************************************//*
Appel indirect avec ladresse de la fonction Seconde contenue *//*
dans le pointeur de fonction *//* Les deux entiers sont affect avec
la sortie des fonctions Premiere et Seconde */Fonction ( pFonction,
Premiere (), Seconde () );
21
-
4.2 Lart et la manire...
Pour bien comprendre lutilit de cette technique de
programmation, il convient den rappelerlobjectif principal : nous
voulons offrir le moyen un dveloppeur dapplication de confi-gurer
un priphrique sans quil est besoin den connatre son fonctionnement.
Le codeque produit le dveloppeur est uniquement dans la couche
application (voir chapitre 1) et il ne peutfaire appel qu des
fonctions de la couche pilote pour manipuler le matriel.
Il se pose alors le problme suivant : comment offrir un service
un dveloppeur dapplicationsqui lui permette dexcuter lors dune
interruption une fonction quil aura dveloppe ?Il est noter que
cette approche est quivalente la notion de services quoffre un
systme dex-ploitation.
Par exemple, il souhaite excuter la fonction :
void Ma_Fonction_IT ( void ) /* Couche application */{
/* Le code excuter pendant linterruption */}
Il faut noter que, quoiquil en soit, cette fonction ne pourra ni
prendre darguments en entre nien retourner puisque son appel ne
sera pas dclencher logiciellement.
Il faut donc que dans le Handler de linterruption (la fonction
qui sera appele en premier lieulors de linterruption) il fasse
appel cette fonction, soit :
void XXX_IRQHandler ( void ) /* Couche pilote */{
Ma_Fonction_IT ();}
Or cela ne respecte pas nos rgles de codage, puisque le Handler
doit faire partie de la couchepilote alors que Ma_foncion_IT fait
partie de la couche application...
Il ny a pas de solution miracle, il faut faire un peu de
programmation avance ! Ca fait dubien aux neurones... Remarquons au
passage que la solution est fournie dans le chapitre 2.
Si dautres solutions effectives sont proposes, nous sommes
preneur.
4.2.1 ... de sen servir avec la solution dynamique
Une premire solution consiste utiliser un pointeur de fonctions
et scrit :
/* Fichier de la couche "application" */void Ma_Fonction_IT (
void ){
/* Le code excuter pendant linterruption */}
/* faire dans le main */Init_Periph(Ma_Fonction_IT);
22
-
/* Fichier de la couche pilote */void (* pFnc) (void) ; /*
dclaration dun pointeur de fonction */
void XXX_IRQHandler ( void ){
if (pFnc != 0)(*pFnc) (); /* appel indirect de la fonction
*/
}
Init_periph (void (* ptrFonction) (void)){
pFnc = ptrFonction; /* affectation du pointeur */}
4.2.2 ... de sen passer avec la solution statique
Une seconde solution consiste dfinir dans un fichier de
configuration la fonction excuterpendant linterruption :
/* Fichier de la couche application crite par lutilisateur du
pilote*/void Ma_Fonction_IT ( void ){
/* Le code excuter pendant linterruption */}
/* Fichier de configuration modifiable par lutilisateur du
pilote*/#ifdef HOOK_ON_XXX
#define XXX_HOOK_CALL Ma_Fonction_IT ()#endif
/* Fichier de la couche pilote uniquement visible par le
dveloppeur du pilote */#ifdef HOOK_ON_XXXvoid XXX_IRQHandler ( void
){
XXX_HOOK_CALL ;}#end
4.2.3 Quelques commentaires pour se faire une religion
Ces deux solutions sont lgantes et permettent de bien sparer les
couches application et pilote.Elles ne sont pas strictement
identiques au niveau fonctionnel et comportent quelques nuances
:
La version dynamique permet de configurer linterruption la vole
et de la reconfigurer encours dexcution.
La version statique ncessite une compilation du fichier pilote
et donc de fournir son code, cequi nest pas le cas de la version
dynamique. De plus, il faut maintenir le fichier de
configura-tion.
23
-
La version statique va gnrer uniquement un Handler sil y a une
fonction excuter alors quela version dynamique gnre un Handler avec
4 lignes de code, plus une fonction dinitialisation(1 ligne) et son
appel du main (1 ligne), ce qui permet davoir un code plus
compact.
24
-
Chap 5: Une mise au pointsimpose !
5.1 Les points darrts et les espions
5.1.1 Les diffrents points darrts
Pour mettre au point vos programmes en assembleur en 3e anne,
vous avez utilis des pointsdarrt dexcution. Il suffit de placer un
tel point darrt sur une instruction pour que lexcution sesuspende
lorsque ladresse de cette instruction est atteinte par le compteur
ordinal du STM32. Ona alors tout loisir pour observer les donnes et
les registres, et, ventuellement, les modifier avantde reprendre
lexcution.
Vision offre dautres possibilits que nous allons rapidement
passer en revue.1. Tout point darrt dispose dun systme de comptage
(count) qui fait que le point darrt
ne devient actif que sil a t atteint le nombre de fois indiqu.
Par dfaut, count=1, et lepoint darrt fonctionne chaque fois que
ladresse est atteinte. Si, par exemple, count vaut3, les 2 premiers
passages lendroit du point darrt ne dclencheront rien, mais
lexcutionsinterrompra au 3e, puis 4e, 5e, 6e, 7e, passage.
2. Lorsquun point darrt actif est atteint, le dbogueur peut
aussi lancer une commande choisieau pralable par lutilisateur. Une
fois la commande finie, lexcution du programme reprend,sans marquer
darrt (le point "darrt" est alors plutt un point de dtournement
vers lemoniteur).
3. Outre le point darrt dexcution, il existe deux autres types
de points darrts : le point darrt daccs la mmoire : le point darrt
est actif si une variable, quil faut bien
sr spcifier lors de la dfinition du point darrt, vient dtre
utilise par une instruction.On peut demander ragir tout type daccs,
ou filtrer en ne considrant que les accs enlecture ou ceux en
criture. On peut aussi demander de ne ragir que si la variable
prendune certaine valeur.
le point darrt conditionnel : on associe cette fois au point
darrt une expression condi-tionnelle qui sera automatiquement teste
en permanence (aprs lexcution de chaque ins-truction). Si la
condition devient vraie, le point darrt est atteint.
N.B. Contrairement au point darrt dexcution, ces deux derniers
points darrt ne sont paslis une instruction spcifique.
En rsum, on peut dire quassocies chaque point darrt, on trouve
trois informations appelesexpression, compte (count) et commande.
Selon que lexpression, obligatoire, est
une instruction (code) : on a un point darrt dexcution ; une
variable, ou une expression boolenne sur la valeur dune variable,
avec laccs READ, ou
WRITE, ou READWRITE : on a un point darrt daccs ; une expression
boolenne ou une variable sans mention daccs : on a un point darrt
condi-
tionnel. La commande est facultative, comme nous lavons vu.
25
-
5.1.2 Pose dun point darrt
Il exite deux possiblits pour poser un point darret : soit avec
la commande spcifique BS dansla fentre de dialogue Output Windows,
soit travers une fentre de gestion associe.
La commande BS
Placer un point darrt dexcution ordinaire est facile : il suffit
de cliquer deux fois sur unespace de la ligne dinstruction, ou
dutiliser le bouton de dpose. Pour placer un point darrt pluslabor,
on peut faire appel la commande du dbogueur BREAKSET (ou BS, cf. la
documentationen ligne Vision Users Guide : Debug Commands). Elle
doit tre tape dans la ligne de commandedu dbogueur, ou place dans
un fichier dinitialisation .ini. Voici la syntaxe de cette commande
:
BS [READ | WRITE | READWRITE] expression [, compte] [,
"commande"]
ainsi que quelques exemples :
Commande au dbogueur Arrt
BS main E sur la 1re instruction de la fonction main()BS
\Timer_1234 \50 E sur linstruction la ligne 175 du module HorlogeBS
Port_IO_Blink 4 E partir du 4e appel la fonction
Port_IO_Blink()(1re instruction)BS TicTac==1 C si le boolen
TicTac devient vraiBS READWRITE Heure A sur tout accs la variable
HeureBS WRITE Test==100,1, " printf(\"Le test vaut 100 \\n\")"
A seulement si Test 100, lancement dune com-mande (printf()
fonc. prdfinie)
BS WRITE Carac < 65 A si Carac reoit une valeur infrieure
65BS Carac < 65 "MaFonction(4)" C si Carac est < 65, lance la
fonction MaFonc-
tion() avec largument 4
Remarques :
1. Dans le dernier exemple, la commande effectue sous condition
consiste en lappel dune fonc-tion de mise au point dfinie par
lutilisateur, en lui fournissant largument 4.
2. Notez aussi que les deux derniers exemples sont dfinis avec
exactement la mme expressionboolenne, Carac < 65, et pourtant,
le premier correspond un point darrt daccs, alorsque le second est
un point darrt conditionnel.
3. Notez galement que la vitesse de simulation est
considrablement diminue par lutilisationde points darrt
conditionnels. Pour la surveillance de variables dterministes, il
vaut doncmieux employer des points darrt sur accs. En revanche, la
surveillance des pattes du STM32exigera lemploi de points darrt
conditionnels.
4. Toutes ces commandes ne sont taper quune seule fois : lorsque
lon fait des allers/retoursentre ldition et le debug, ces
informations sont conserves.
26
-
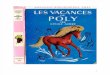
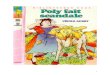
Figure 5.1 Fentre de gestion des points darrts
Pose dun point darrt grce la fentre de gestion des points
darrt
Pour un dbutant, lutilisation de la commande BS nest pas trs
facile. Il est alors plus simple defaire appel la fentre de gestion
des points darrts, appele par Debug Breakpoints,... (Voirfigure
5.1) Pour poser un nouveau point darrt dans cette fentre, vous
devez au moins y fournirlexpression dfinissant ladresse daccs, et,
ventuellement, modifier le compte, spcifier laccsen mmoire ainsi
que le nombre dobjets (ou doctets) concerns partir de ladresse
daccs, etspcifier une commande. La figure suivante reprsente cette
fentre de gestion, au moment o lonsapprte dfinir le dernier point
darrt du tableau prcdent (conditionnel car aucune des casesAccess
na t coche). Les autres points darrt prsents correspondent aussi
ceux de ce tableaudexemples.
5.2 Emulation avance
Le logiciel de dveloppement que vous utilisez offre des
possibilits de contrle de lexcution duprogramme qui permettent
davoir une grande matrise de ce qui passe. Nous distinguerons dans
ceparagraphe deux aspects particuliers qui sont le contrle de
lexcution et le contrle des activitssur les broches du circuit
5.2.1 Contrle de lexcution
Pour avoir une comprhension complte et une action possible de
lexcution dun programmeen mode simul le logiciel donne accs des
variables du systme. Attention il ne faut pas lesconfondre avec des
registres du microcontrleur (mme si certaines dentre elles
apparaissent commetel dans le fentre register en mode debug). Ces
variables vous permettent, depuis une fonction ou
27
-
une commande, dobtenir des informations sur ltat de votre
programme lorsquun point darrtest atteint. Elles permettent aussi
de contrler la reprise de lexcution. Vous les trouverez listesen
totalit dans le documentation Vision Users Guide -> Debbuging
Voici les trois variablessystmes les plus utiles :
nom type accs Description sommaire
_break_ unsigned int R/W Arrte lexcution si sa valeur est
diffrente de 0(voir son utilisation au paragraphe suivant).
states unsigned long R Valeur courante du compteur dtats
(coupsdhorloge) de la CPU. Ce compteur est remis 0 au dbut de toute
excution.
$ unsigned long R/W Valeur courante du pointeur de programme.
Onpeut changer sa valeur pour effectuer un sautdans le code.
Remarques : La variable states se dcline en variable sec en
convertissant le nombre decoups dhorloge en seconde par la simple
multiplication la priode de lhorloge CPU. Ces variablespermettent
donc davoir un mesure trs prcise du temps dexcution qui sera coul
en mode rel.
La variable _break_ permet quant elle davoir une influence sur
le droulement de lexcutionde lmulation. Quand une fonction ou une
commande est appele lorsquun point darrt a tatteint, vous pourrez
remarquer que normalement, lexcution reprend sans marquer darrt. Il
estpossible dobtenir quand mme un arrt, en programmant la fonction
pour quelle change la valeurde la variable _break_.
Nous allons voir quelques exemples de fonctions dfinies par
lutilisateur, en supposant quon aplac un point darrt devant ragir
tout accs en criture au registre GPIOB_ODR : BS WRITEGPIOB_ODR. Le
comportement dun tel point darrt dpend de la commande associe
? Sil ny a aucune commande prvue, lexcution stoppe chaque
criture dans loctet de poidsfaible du port 3.
? Si lon associe au point darrt la fonction suivante :
FUNC void SansArret (void){if ((PORTB & 0x0200) == 0) /*
PORTB est un VTREG : on teste la borne GPIOB.9 */
printf ("La borne = GPIOB.9 est 0 !\n") ;else
printf ("Bip\n") ;}
Pour cette, on a employ le VTREG PORTB (cf.paragraphe 5.2.2 pour
la comprhension desVTREG). Ainsi on observe ce qui se passe au
niveau de lactivit lectrique des broches (PORTB)et non pas au
niveau de lactivit logique du registre sens la piloter (GPIOB_ODR).
Ceci permetde confirmer, par exemple, que la configuration de
direction est bien positionne. Lexcution duprogramme ne sinterrompt
pas, mais chaque fois que le point darrt est atteint, on a un
message
28
-
qui saffiche dans la fentre de messages du dbogueur : les
niveaux bas de la borne 9 du portGPIOB sont identifis par un
message particulier.
? Changeons de fonction :
FUNC void AvecArret (void){if ((PORTB & 0x0200) == 0) /*
PORTB est un VTREG : on teste la borne GPIOB.9 */
{printf ("La borne = GPIOB.9 est 0 !\n") ;_break_ = 1 ; /*
variable systme, globale, permanente */}
elseprintf ("Bip\n") ;
}
Tant que le bit 9 nest pas 0, lexcution continue avec affichage
du message "Bip" chaquecriture dans le port GPIOB (pf). Puis
lexcution sinterrompt systmatiquement pour toute autremodification
du port GPIOB.
? Avec lexemple suivant, lexcution sarrte chaque criture avec le
bit 3 0 :
FUNC void SemiArret (void){if ((PORTB & 0x0200) == 0) /*
PORTB est un VTREG : on teste la borne GPIOB.9 */
{printf ("La borne = GPIOB.9 est 0 !\n") ;_break_ = 1 ; /* arrt
*/}
else{printf ("Bip\n") ;_break_ = 0 ; /* pas darrt */}
}
? Nous avons vu que tout point darrt pouvait ne devenir actif
quaprs avoir t atteint uncertain nombre de fois, grce la proprit de
comptage (count). Avec _break_, on peutraliser lopration duale :
fabriquer un point darrt qui ne fonctionne quun certain nombrede
fois, en dbut de lexcution. Par exemple :
29
-
FUNC void Arret_ X _ fois (void){if ((PORTB & 0x0200) == 0)
/* PORTB est un VTREG : on teste la borne GPIOB.9 */
{printf ("La borne = GPIOB.9 est 0 !\n") ;if (_break_ != 0) /*
ou if ( !_break_) */
_break_ = _break_ - 1 ;}
}
Avant de lancer lexcution, il faut initialiser la variable
_break_ en tapant, par exemple, lacommande _break_ = 5. Lexcution
sarrtera alors 4 fois, puis ne sarrtera plus.
5.2.2 Simulation de lactivit des broches du STM32
Lorsque lon cherche mettre au point un programme pour un
microcontrleur en mode simul,une des difficults majeures est de
pouvoir agir (et observer) sur ce quil se passe au niveau
desbroches du circuit. Cela induit que lon soit capable de simuler
galement lenvironnement extrieuret donc de se mettre dans des
conditions de travail qui sapproche le plus possible des
conditionsrelles dexprimentation. Cette simulation des interactions
aux bornes du STM32 peut seffectuerde deux manires : la premire
mthode, rudimentaire, consiste utiliser les fentres ouvertes parle
menu droulant Peripherals.
Remarque : souvenez-vous que sous simulation, vous ne bnficiez
de la mise jour rguliredes fentres du dbogueur que si vous avez
coch loption View Periodic Window Update.
La seconde mthode, plus puissante, fait appel une vritable
programmation simulant le mondeextrieur laide de fonctions (que
nous appellerons fonctions de lutilisateur), crites en un langageC
rduit, contenues dans un fichier dinitialisation dont le nom
prsente le suffixe .ini. Ces fonctions- fonctions de mise au point
et fonctions signal - sont destines au dbogueur, et ne font pas
partiedu programme pour le STM32, mme sil est dusage dinclure ce
fichier .ini dans le projet. Onindique au dbogueur de prendre en
compte ces fonctions en citant le nom de ce fichier dans le
menuProject Options for Target Xxx Debug Initialization File ou
bien en utilisantla commande au dbogueur INCLUDE (cf. dernier
paragraphe).
Les fonctions de lutilisateur
Ces fonctions, destines au dbogueur, sont indpendantes du
programme mettre au point.Elles permettent, comme nous venons de le
dire, la simulation du monde extrieur. Pour les crire,lutilisateur
emploie la syntaxe du langage C-ANSI, quelques restrictions prs (cf
5.2.2). Si elles en-voient des signaux - gnralement priodiques -
vers les pattes dentre des priphriques du STM32on les appelle
fonctions signal ; elles nentrent en fonction que si elles ont t
lances en tapant leurnom dans la ligne de commande du dbogueur. Les
fonctions de mise au point, elles, permettentdobserver ltat
lectrique des pattes de sortie des priphriques du STM32 et
permettent aussidobserver et de modifier tous les registres du
STM32, ainsi que toutes les variables de son pro-gramme. Dans ce
cas, elles sont souvent associes un point darrt, cest--dire quune
certaine
30
-
fonction de mise au point nest lance que si une condition darrt
a t atteinte par le programme(cf. les points darrt) . Dautre part,
pour Vision, il existe en fait deux classes de fonctions :
lesfonctions dfinies par lutilisateur, celles dont nous venons de
parler, et les fonctions prdfinies,cest--dire faisant partie de la
bibliothque fournie avec le dbogueur (built-in functions). Avant
dedtailler ces fonctions, voyons comment seffectue linterface entre
les deux simulateurs.
Les bornes du STM32 (VTREG)
Pour avoir accs aux bornes du microcontrleur, il faut que les
fonctions crites par lutilisateurpuissent les dsigner. Pour cela,
ltat lectrique des pattes des ports du STM32 est gard dans
desregistres spciaux appels VTREG (Virtual Target Register). Ces
registres sont externes au STM32et font partie du simulateur. Ils
peuvent contenir des valeurs analogiques (entres du
convertisseuranalogique-numrique ADC) ou numriques. En voici
quelques-uns :
VTREG Description Type Type C
PORTA E/S numriques 16 bits unsigned char, ucharPORTB E/S
numriques 16 bits unsigned char, ucharPORTC E/Snumriques 16 bits
unsigned int, uintPORTD E/S numriques 16 bits ( !3 pf utiles)
unsigned int, uint
ADC1_INy Lentre analogiques x du convertisseur 1 rel
floatADC2_INy Lentre analogiques x du convertisseur 2 rel float
SxIN Le buffer dentre de la liaison srie x 16 bits unsigned int,
uintSxOUT Le buffer de sortie de la liaison srie x 16 bits unsigned
int, uintSxTIME La vitesse (baudrate) de la liaison srie x 16 bits
unsigned int, uint
Attention ! Ne confondez pas GPIOB_ODR, le registre de donnes en
sortie du port GPIOB,interne au STM32, et PORTB, le VTREG indiquant
les niveaux physiques des pattes du STM32,vues depuis le monde
extrieur. Les deux entits (GPIOB_ODR et PORTB) existent bien
maispeuvent prendre des valeurs diffrentes. Cela correspond en mode
rel au cas o une broche dentreTTL est niveau haut alors que le bit
du registre correspondant reste au niveau bas ( cause dunemauvaise
configuration du GPIOB_CRH par exemple).
Fonctions prdfinies
En voici quelques unes parmi les plus courantes (liste complte
et documentation de Vision-Debugging - Debug Functions - Predifined
Function). Ces fonctions lorsquelles sont insres dansune script de
simulation (fichier .ini) permettent de se fabriquer un scnario
dvnements et devisualiser ce quil se passe en raction. Lide de base
de toute cette approche est de tester unexcutable sans modifier une
seule ligne de celui-ci : le code est instrumentalis depuis
lextrieur.
31
-
Retour Nom Argument Description
void printf ("format",...) comme printf() du langage C-ANSIint
getint ("chane dinvite") demande lutilisateur de fournir un
entierint rand (int seed) fournit un entier alatoire sign -
32768..+32767void twatch (ulong states) bloque lexcution de la
fonction durant le
nombre de coups dhorloge pass en argu-ment.
void exec ("commande(chane)" excute depuis une fonction une
com-mande au dbogueur
uchar _RBYTE (adresse) lit un octet (char) en mmoireuchar _RWORD
(adresse) lit un mot (int) en mmoirevoid _WBYTE (adresse, uchar
valeur) crit un octet en mmoirevoid _WWORD (adresse, uchar valeur)
crit un mot en mmoire
Remarque : mis part printf(), vous ne disposez pas des fonctions
dentres/sorties (stdio)du langage C. Cela peut paratre limitatif
mais noubliez pas que le but des ces fonctions est defaire de la
mise au point dapplication et non des interfaces homme/machine
volues.
Les fonctions de mise au point
La syntaxe gnrale de ces fonctions est la suivante :
FUNC (){
}
Exemple :
/* Etat()* Indique le niveau dentre appliqu AN0, et qqs
registres.*/FUNC void Etat (void)
{ /* pas de variables locales dans cet exemple */printf
("===================================\n") ;printf (" Entree
analogique-0 : %f Volts \n", ADC1_IN1) ; /* VTREG ADC1_IN1 */printf
("===================================\n\n") ;printf ("******
Registres du STM32 *******\n") ;
32
-
printf ("* R1 R2 R3 R4 R5 R6 \n") ;printf ("* %08X %08X %08X
%08X %08X %08X \n",
, R1, R2, R3, R4, R5, R6) ; /* registres */printf
("********************************\n") ;printf ("* Registre (SP) :
%04X\n", R13) ;printf ("* Program Counter : %06LX\n",R15 ) ; /* PC
courant */
/* (lettre L) entier long (32 bits)*/printf
("********************************\n") ;}
Pour appeler cette fonction, il faut taper sur la ligne de
commande du dbogueur :Etat()
Etat() et lexcution, dans la fentre de messages du dbogueur,
pourrait ressembler :
===================================Entree analogique-0 :
2.452000 Volts===================================******************
Registres du STM32 ******************** R1 R2 R3 R4 R5 R6* 00000001
00000200 40010C00 00000000 00000000
00000000********************************* Registre (SP) : 20004FB8*
Program Counter : 80004A0********************************
La fonctions signal
La syntaxe gnrale de ces fonctions est la suivantes :
SIGNAL void (){
}
Une fonction signal permet de rpter des actions externes, comme
par exemple lenvoi de signauxpriodiques ou dimpulsions vers le
STM32 simul. Une fonction signal doit toujours faire appel twatch()
ou swatch(). Voici un exemple de fonction qui envoie des rampes
priodiques dchelonsde tension (100 mV) vers lentre analogique n
0.
33
-
/* Analog0(float Maxi)* Simule un signal variable analogique
appliqu lentre AN0.* Argument dentre fournir : la valeur maxi du
signal.* Forme du signal : priodique, fonction toit asymtrique, par
incr-* ments (ou dcrments) de 0,1V.*/ Signal void Analog0 (float
Maxi)
{ float SignAnalog ;printf ("Signal en marche. Maximum = %f.\n",
Maxi) ;while (1) /* linfini... Donc signal priodique */{SignAnalog
= 0.0 ; while (SignAnalog Maxi) /* Croissance du signal */{ADC1_IN0
= SignAnalog ; /* Signal appliqu au VTREG ADC1_IN0 */swatch (0.01)
; /* Attendre 0.01 secondes */SignAnalog = SignAnalog + 0.1 ; /*
Signal crot */
}SignAnalog = Maxi ;while (SignAnalog Maxi) /* Croissance
linaire du signal */{ADC1_IN0 = SignAnalog ; /* Signal appliqu au
VTREG ADC1_IN0 */swatch (0.02) ; /* Attendre 0.02 secondes
*/SignAnalog = SignAnalog - 0.2 ; /* Signal crot */
}}
}
Dans cet exemple, vous notez lutilisation? dune variable locale
SignAnalog,? du VTREG ADC1_IN0? des fonctions prdfinies printf() et
swatch().
Lintervalle entre deux paliers de tension conscutifs est de 4
secondes lors de la monte du signal, etde 2 secondes lors de la
descente. La valeur maximale atteinte par le signal est donne en
argumentlors de lappel, par exemple Analog0(1.2) Une fois ainsi
lance, cette fonction ne sarrte que si ondtruit la fonction par la
commande au dbogueur : SIGNAL KILL Analog0
Restrictions et diffrences par rapport au C-ANSI
Lors de lcriture dune fonction, lutilisateur emploie un langage
C limit selon les points essen-tiels suivants (vous trouverez plus
de dtails p. 119 dans Vision2 Getting Started) :
? Majuscules et minuscules sont confondues : les VTREG ADC1_IN2
ou PORTC peuvent aussitre dsign Adc1_In1 et portC.
34
-
? Pas de prprocesseur : #define, #include, #ifdef ne marchent
pas !? Dclaration de variables globales interdites. On peut
cependant utiliser des grandeurs globales
si on les a au pralable fabriques sous dbogueur par la commande
DEFINE .? Aucune variable ne peut tre initialise lors de sa
dclaration.? Structures interdites !? Le type de la valeur retourne
par une fonction ne peut tre un pointeur.? Pas de rcursivit.? Pas
dappel indirect de fonctions.
Quelques commandes utiles
En guise de bouquet final, voici listes ci dessous quelques
commandes qui pourront agrmenterlutilisation de ces fonctions
utilisateurs :
Nom Exemple Action
EVALUATE EVAL 0x1234 donne la valeur de 0x1234 dans diverses
bases dereprsentation
KILL KILL FUNC * dtruit toutes les fonctions (signal ou non)
char-ges par lutilisateur dans le dbogueur
KILL FUNC Toto dtruit la fonction de mise au point Toto()SIGNAL
SIGNAL KILL Titi dtruit la fonction signal Titi()
SIGNAL STATES donne ltat des diverses fonctions signalDEFINE
DEFINE CHAR UnOctet dfinit une grandeur globale intitule
UnOctet
DEFINE FLOAT UnReel dfinit un rel globalAffectation UnOctet=0x80
affecte un octet
UnReel=3.14159 affecte un relINCLUDE INCLUDE Tutu.ini charge le
dbogueur avec les fonctions ou les
commandes incluses dans le fichier Tutu.iniDIR 1 DIR SIGNAL
liste toutes les fonctions signal
DIR UFUNC liste toutes les fonctions de mise au point crespar
lutilisateur
DIR BFUNC liste les fonctions prdfiniesDIR FUNC liste toutes les
fonctions de Vision
35
On en tient une coucheIntroduction et dfinitionsArchitecture
logicielle recommandeGuide des bonnes maniresLa couche
matrielle
Faudrait pas prendre les pilotes pour des navigateurs ! Premier
exemple : configuration d'une broche d'entre-sortiePilote
dynamiquePilote statique
Second exemple : configuration d'une interruptionPilote
dynamiquePilote statique
Bah ! Les masquesOprateur logiques et bit bitMettre un bit
1Mettre un bit 0Inverser un bitInitialiser une tranche de bits
L'pointeur de fonctions ne manque(nt) pas de piquant !Appel
indirect des fonctionsPointeur de fonctionAffectation d'un pointeur
de fonctionAppel de fonction par un pointeurPassage de fonctions en
paramtre
L'art et la manire... ... de s'en servir avec la solution
dynamique... de s'en passer avec la solution statiqueQuelques
commentaires pour se faire une religion
Une mise au point s'impose ! Les points d'arrts et les
espionsLes diffrents points d'arrtsPose d'un point d'arrt
Emulation avanceContrle de l'excutionSimulation de l'activit des
broches du STM32