Embed Size (px)
Citation preview
Ultra Generic 3D RoboticsUltra Generic 3D RoboticsConfidentiel - Janvier [email protected] [email protected]
1
Robokitz Une modularité extrêmepour la robotique terrestre
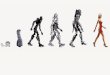
La modularité avancée constitue une technologie de rupture applicable directement dans le domaine militaire. Au lieu d'équiper une armée avec un ensemble d'équipements autonomes et disjoints, chacun ayant une fonction bien précise, nous proposons une approche de type « kit » permettant de construire plusieurs robots très différents avec un même ensemble de modules
Module motoriséavec gamme modulaire de six rapports de réduction échelonnésde 1:8 à 1:300
Fort coupleFaible vitesse
Couple moyenVitesse moyenne
Faible coupleGrande vitesse
2 modules + 1 pièce intermédiaire
3 modules
2 modules
Rapports de réduction échelonnés
Effet fractal : tout module peut s'assembler avec des modules de taille plus petite ou plus grande
Clip de verrouillageinter-modules. Plusieurs systèmes de verrouillage sont disponibles
Montage latéral
Montage axial
Ultra Generic 3D RoboticsUltra Generic 3D RoboticsConfidentiel - Janvier [email protected] [email protected]
2
E1
I1
I2
S12 S22 S32
S31
Commande
E2
Commande
E3
Bus CAN
Commande
CaméraLiaisonsans fil
21S
Moteur-roue
11S
Robokitz Une modularité extrêmepour la robotique terrestre
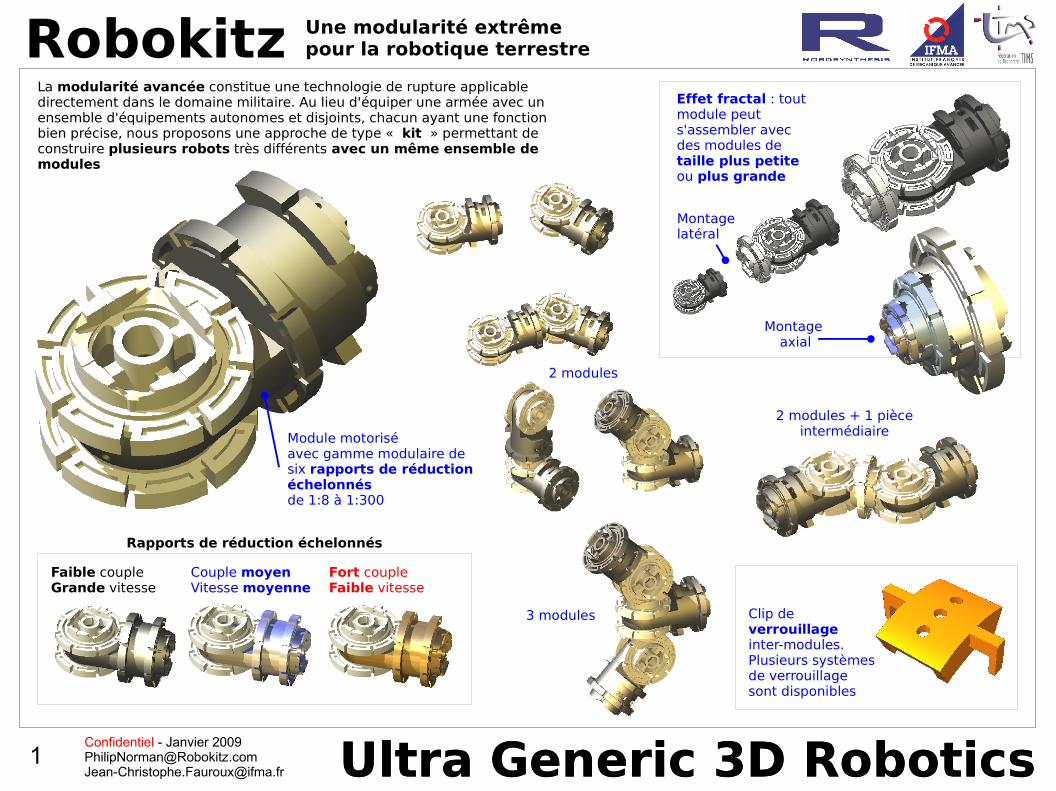
La modularité avancée a de nombreux avantages :- généricité (tous types de robots peuvent être fabriqués)- standardisation (peu de modules)- faible coût (fabrication en série)- qualité (peu de modules mais très optimisés)- fiabilité (si un module casse, on le change par un neuf)
Gamme de modules capteurEx : Caméra repositionnable
Assemblage de type roue-patte
- Bras manipulateurs- Robots mobiles à pattes- Robots mobiles à roues- Robots grimpeurs de poteaux (brevet Thales IFMA 2008)- Robots explorateurs de tuyaux
Robokitz permet de réaliser simplement tout type de robot mobile de la famille OpenWHEEL [TIMS/LaMI 2006]
Mécanisme de type roue-patte
Mécanismeinter-essieu
Fonction pince à 3 doigts
Fonction pince à 2 doigts
Applications en robotique terrestre
Assemblage de type essieu
complet
Ultra Generic 3D RoboticsUltra Generic 3D RoboticsConfidentiel - Janvier [email protected] [email protected]
3
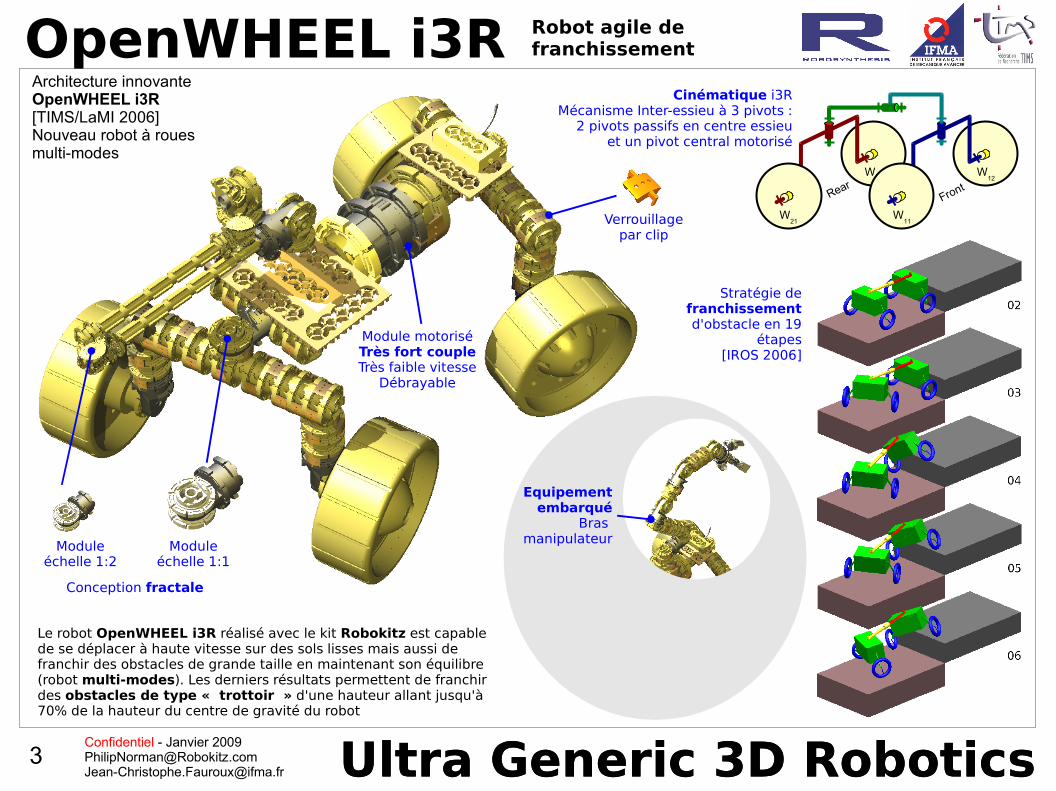
Architecture innovante OpenWHEEL i3R [TIMS/LaMI 2006]Nouveau robot à rouesmulti-modes
RearFront
W22
W21
W12
W11
Moduleéchelle 1:1
Equipement embarqué
Bras manipulateurModule
échelle 1:2
Verrouillagepar clip
Cinématique i3RMécanisme Inter-essieu à 3 pivots :
2 pivots passifs en centre essieuet un pivot central motorisé
Stratégie de franchissementd'obstacle en 19
étapes[IROS 2006]
OpenWHEEL i3R
Le robot OpenWHEEL i3R réalisé avec le kit Robokitz est capable de se déplacer à haute vitesse sur des sols lisses mais aussi de franchir des obstacles de grande taille en maintenant son équilibre (robot multi-modes). Les derniers résultats permettent de franchir des obstacles de type « trottoir » d'une hauteur allant jusqu'à 70% de la hauteur du centre de gravité du robot
Conception fractale
Module motoriséTrès fort coupleTrès faible vitesse
Débrayable
Robot agile defranchissement
Ultra Generic 3D RoboticsUltra Generic 3D RoboticsConfidentiel - Janvier [email protected] [email protected]
4
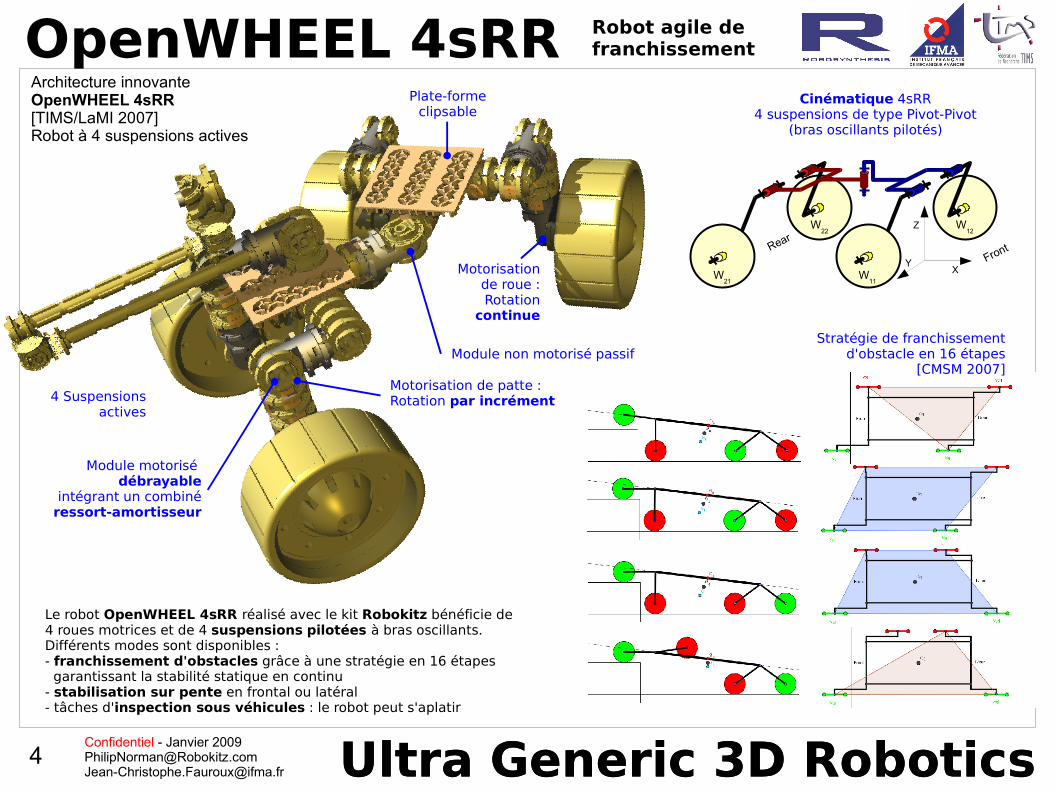
Architecture innovante OpenWHEEL 4sRR [TIMS/LaMI 2007]Robot à 4 suspensions actives
Rear
X
Z
Y Front
W22
W12
W21
W11
Cinématique 4sRR4 suspensions de type Pivot-Pivot
(bras oscillants pilotés)
Stratégie de franchissement d'obstacle en 16 étapes
[CMSM 2007]
Le robot OpenWHEEL 4sRR réalisé avec le kit Robokitz bénéficie de 4 roues motrices et de 4 suspensions pilotées à bras oscillants. Différents modes sont disponibles :- franchissement d'obstacles grâce à une stratégie en 16 étapes garantissant la stabilité statique en continu
- stabilisation sur pente en frontal ou latéral- tâches d'inspection sous véhicules : le robot peut s'aplatir
4 Suspensions actives
Module motorisé débrayable
intégrant un combiné ressort-amortisseur
Module non motorisé passif
Motorisation de roue :Rotation
continue
Motorisation de patte : Rotation par incrément
Plate-forme clipsable
OpenWHEEL 4sRR Robot agile defranchissement
Ultra Generic 3D RoboticsUltra Generic 3D RoboticsConfidentiel - Janvier [email protected] [email protected]
5
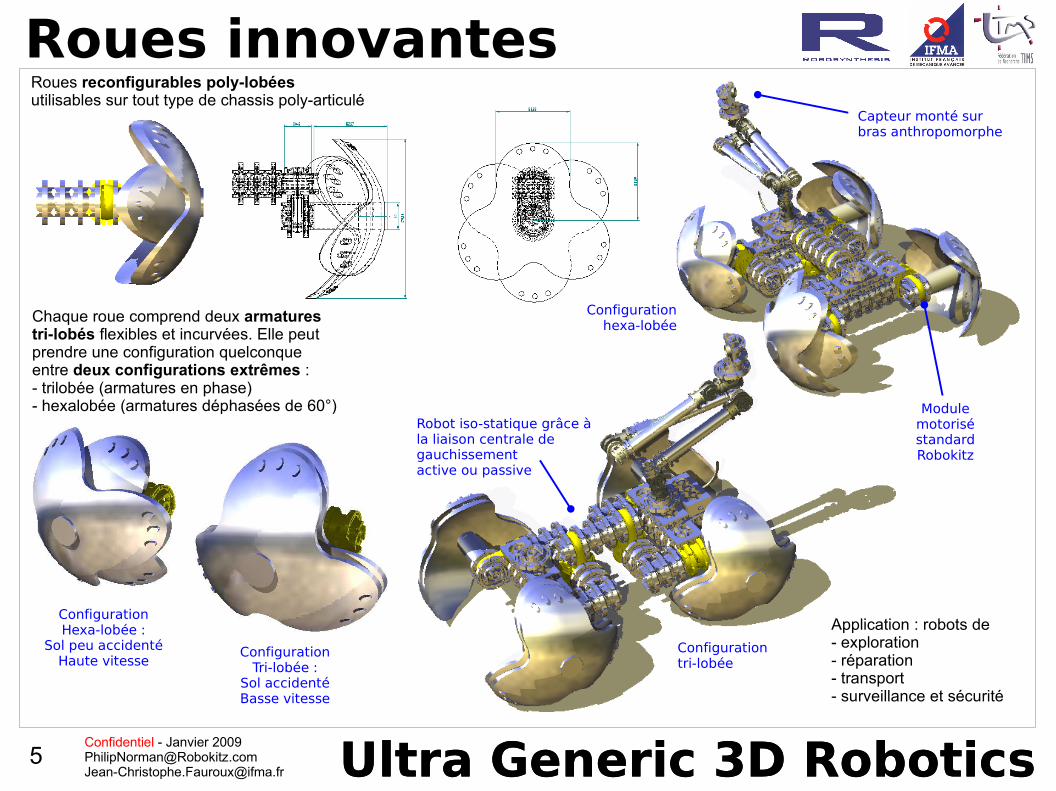
Roues innovantes
Robot iso-statique grâce à la liaison centrale de gauchissementactive ou passive
Module motorisé standard Robokitz
Chaque roue comprend deux armatures tri-lobés flexibles et incurvées. Elle peut prendre une configuration quelconque entre deux configurations extrêmes :- trilobée (armatures en phase)- hexalobée (armatures déphasées de 60°)
ConfigurationHexa-lobée :
Sol peu accidentéHaute vitesse
ConfigurationTri-lobée :
Sol accidentéBasse vitesse
Roues reconfigurables poly-lobéesutilisables sur tout type de chassis poly-articulé
Application : robots de - exploration- réparation- transport- surveillance et sécurité
Capteur monté sur bras anthropomorphe
Configuration tri-lobée
Configuration hexa-lobée
Ultra Generic 3D RoboticsUltra Generic 3D RoboticsConfidentiel - Janvier [email protected] [email protected]
6
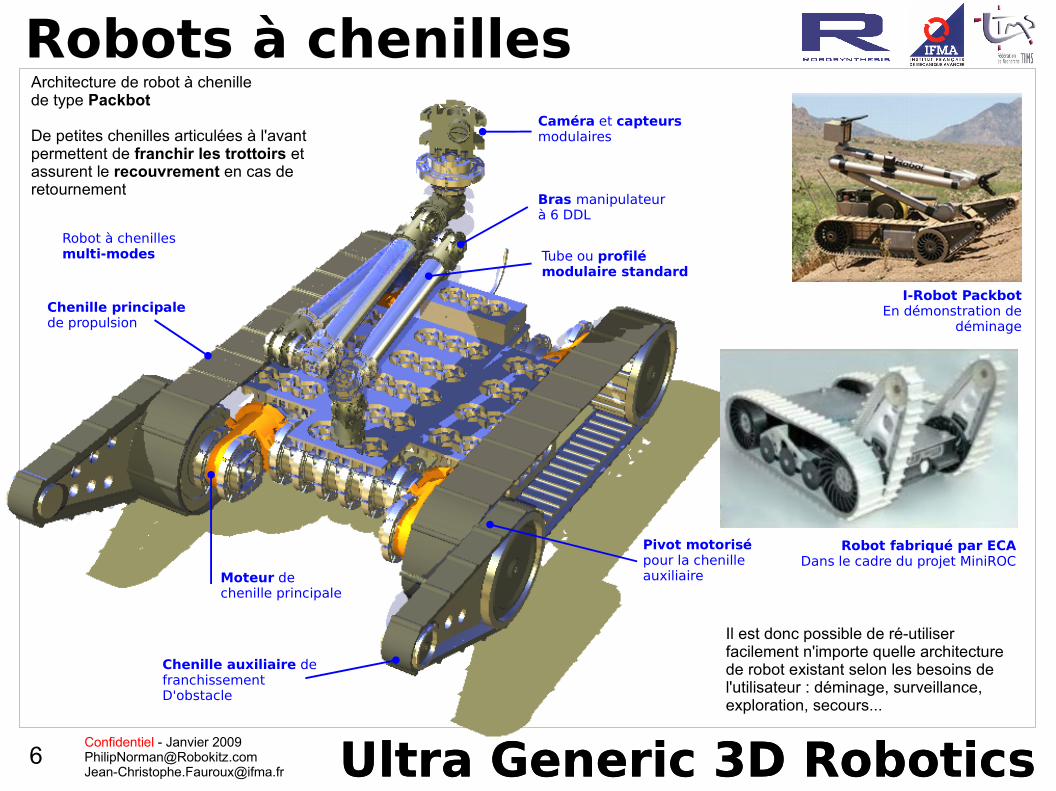
Robots à chenilles
Robot à chenilles multi-modes
Chenille principale de propulsion
Chenille auxiliaire de franchissementD'obstacle
Pivot motorisé pour la chenille auxiliaireMoteur de
chenille principale
Bras manipulateurà 6 DDL
Caméra et capteurs modulaires
Tube ou profilé modulaire standard
I-Robot PackbotEn démonstration de
déminage
Robot fabriqué par ECADans le cadre du projet MiniROC
Architecture de robot à chenillede type Packbot
De petites chenilles articulées à l'avant permettent de franchir les trottoirs et assurent le recouvrement en cas de retournement
Il est donc possible de ré-utiliser facilement n'importe quelle architecture de robot existant selon les besoins de l'utilisateur : déminage, surveillance, exploration, secours...
Ultra Generic 3D RoboticsUltra Generic 3D RoboticsConfidentiel - Janvier [email protected] [email protected]
7
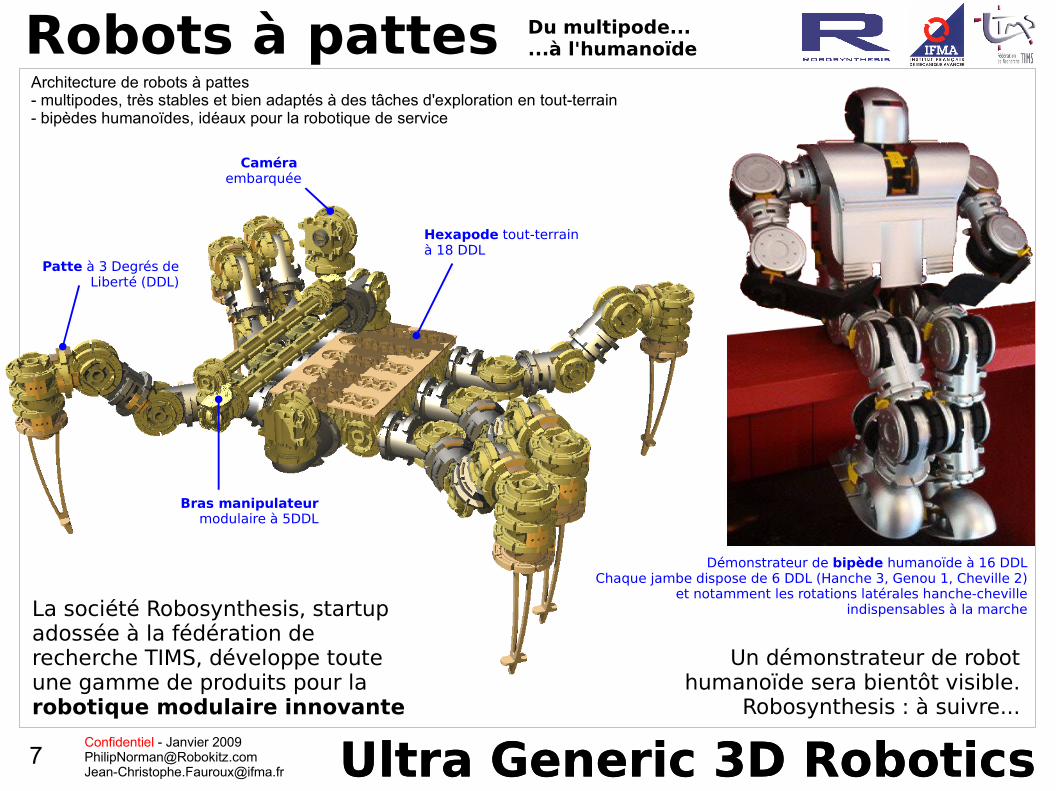
Robots à pattes Du multipode......à l'humanoïde
Hexapode tout-terrain à 18 DDL
Bras manipulateurmodulaire à 5DDL
Caméra embarquée
Architecture de robots à pattes- multipodes, très stables et bien adaptés à des tâches d'exploration en tout-terrain- bipèdes humanoïdes, idéaux pour la robotique de service
Patte à 3 Degrés de Liberté (DDL)
Démonstrateur de bipède humanoïde à 16 DDLChaque jambe dispose de 6 DDL (Hanche 3, Genou 1, Cheville 2)
et notamment les rotations latérales hanche-chevilleindispensables à la marcheLa société Robosynthesis, startup
adossée à la fédération de recherche TIMS, développe toute une gamme de produits pour la robotique modulaire innovante
Un démonstrateur de robothumanoïde sera bientôt visible.
Robosynthesis : à suivre...