Embed Size (px)
Citation preview
PPP-GNSS:Principe et Nouveautés
Rock SANTERRE, Ph.D., a.-g., ing.
Département des Sciences GéomatiquesCentre de Recherche en Géomatique
Université Laval
Colloque CIDCO 2015Rimouski (Québec)
18-19 juin 2015
www.scg.ulaval.ca/gps-rs/
CONTENU DE LA PRÉSENTATION
- Comparaison des modes de positionnement GPS (GNSS)
- Sources d’erreurs GPS (GNSS) et modélisation en mode absolu
- Solutions PPP «standard»
- Solutions PPP en temps réel
- Solutions IAR-PPP
- Exemples de résultats et applications PPP
- Développements actuels et futurs
- Références et sites Internet
2
R. Santerre, SCG-CRG. U. Laval, juin 2015
PPP: Precise Point Positioning / Positionnement Ponctuel Précis
R. Santerre, SCG-CRG. U. Laval, juin 2015
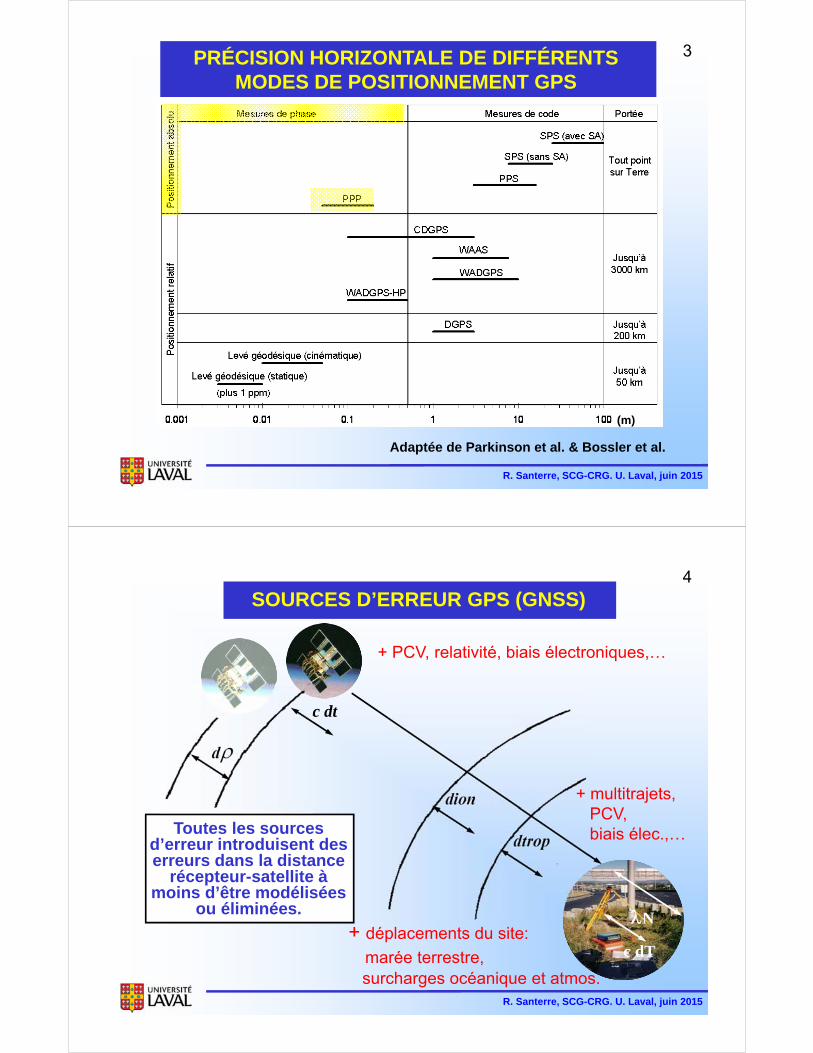
PRÉCISION HORIZONTALE DE DIFFÉRENTSMODES DE POSITIONNEMENT GPS
Adaptée de Parkinson et al. & Bossler et al.
(m)
3
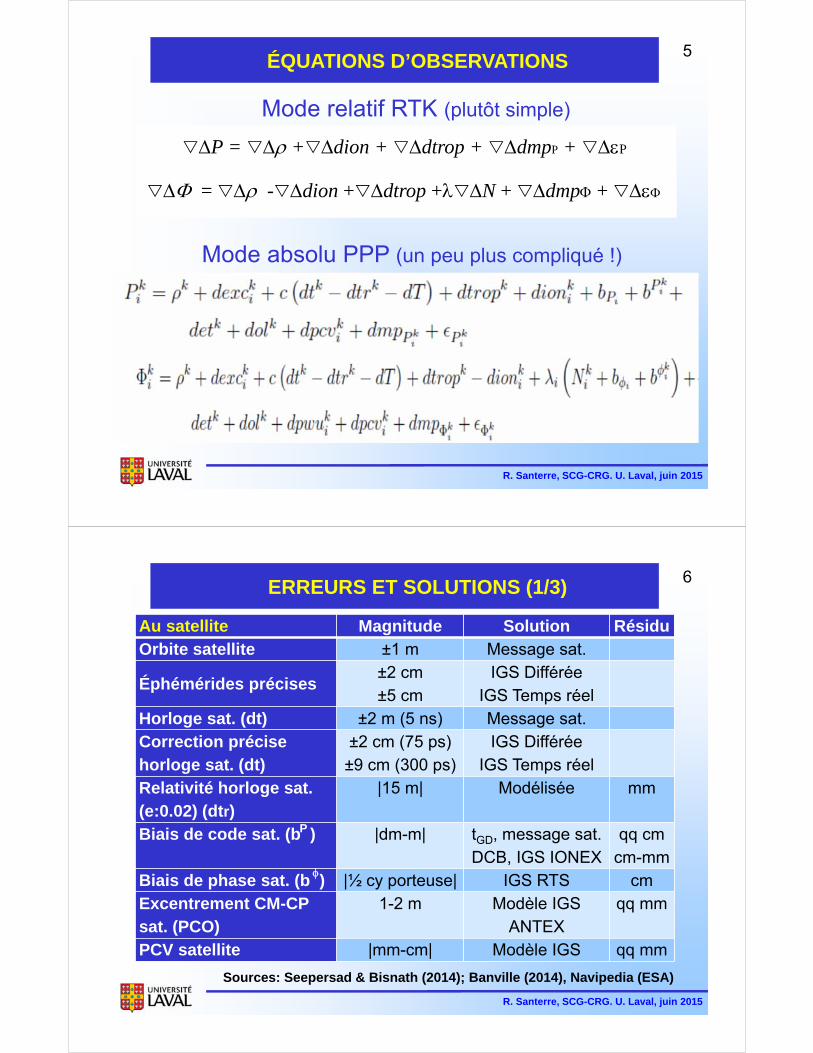
SOURCES D’ERREUR GPS (GNSS)
Toutes les sources d’erreur introduisent des erreurs dans la distance
récepteur-satellite à moins d’être modélisées
ou éliminées.
d
c dt
dion
c dT
dtrop
N
R. Santerre, SCG-CRG. U. Laval, juin 2015
+ PCV, relativité, biais électroniques,…
+ multitrajets,PCV,biais élec.,…
+ déplacements du site:
marée terrestre,surcharges océanique et atmos.
4
ÉQUATIONS D’OBSERVATIONS
R. Santerre, SCG-CRG. U. Laval, juin 2015
Mode absolu PPP (un peu plus compliqué !)
Mode relatif RTK (plutôt simple)
= -dion +dtrop +N + dmp +
P = +dion + dtrop + dmpP + P
5
ERREURS ET SOLUTIONS (1/3)
R. Santerre, SCG-CRG. U. Laval, juin 2015
Sources: Seepersad & Bisnath (2014); Banville (2014), Navipedia (ESA)
Au satellite Magnitude Solution RésiduOrbite satellite ±1 m Message sat.
Éphémérides précises±2 cm±5 cm
IGS DifféréeIGS Temps réel
Horloge sat. (dt) ±2 m (5 ns) Message sat.Correction précise horloge sat. (dt)
±2 cm (75 ps)±9 cm (300 ps)
IGS DifféréeIGS Temps réel
Relativité horloge sat. (e:0.02) (dtr)
|15 m| Modélisée mm
Biais de code sat. (b ) |dm-m| tGD, message sat.DCB, IGS IONEX
qq cmcm-mm
Biais de phase sat. (b ) |½ cy porteuse| IGS RTS cmExcentrement CM-CP sat. (PCO)
1-2 m Modèle IGS ANTEX
qq mm
PCV satellite |mm-cm| Modèle IGS qq mm
6
P
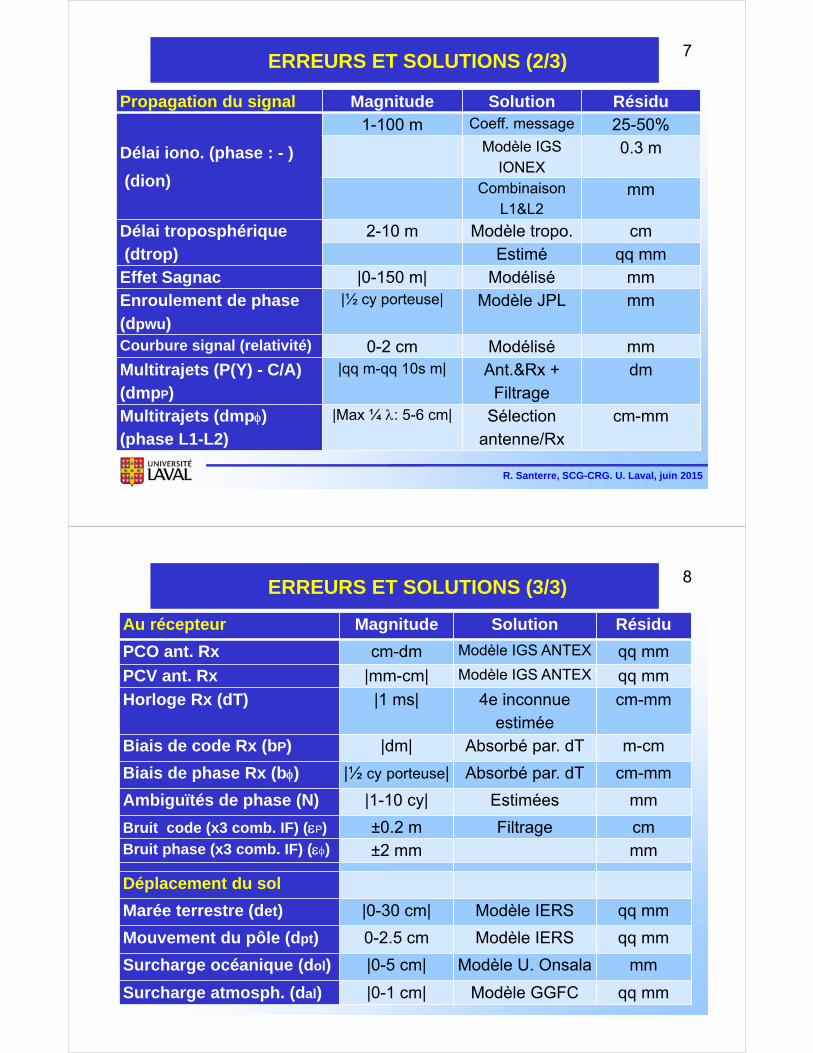
ERREURS ET SOLUTIONS (2/3)
R. Santerre, SCG-CRG. U. Laval, juin 2015
Propagation du signal Magnitude Solution Résidu
Délai iono. (phase : - )
(dion)
1-100 m Coeff. message 25-50%Modèle IGS
IONEX0.3 m
Combinaison L1&L2
mm
Délai troposphérique(dtrop)
2-10 m Modèle tropo. cmEstimé qq mm
Effet Sagnac |0-150 m| Modélisé mmEnroulement de phase(dpwu)
|½ cy porteuse| Modèle JPL mm
Courbure signal (relativité) 0-2 cm Modélisé mmMultitrajets (P(Y) - C/A)(dmpP)
|qq m-qq 10s m| Ant.&Rx + Filtrage
dm
Multitrajets (dmp)(phase L1-L2)
|Max ¼ : 5-6 cm| Sélection antenne/Rx
cm-mm
7
ERREURS ET SOLUTIONS (3/3)8
Au récepteur Magnitude Solution Résidu
PCO ant. Rx cm-dm Modèle IGS ANTEX qq mm
PCV ant. Rx |mm-cm| Modèle IGS ANTEX qq mm
Horloge Rx (dT) |1 ms| 4e inconnue estimée
cm-mm
Biais de code Rx (bP) |dm| Absorbé par. dT m-cm
Biais de phase Rx (b) |½ cy porteuse| Absorbé par. dT cm-mm
Ambiguïtés de phase (N) |1-10 cy| Estimées mm
Bruit code (x3 comb. IF) (P) ±0.2 m Filtrage cmBruit phase (x3 comb. IF) () ±2 mm mm
Déplacement du sol
Marée terrestre (det) |0-30 cm| Modèle IERS qq mm
Mouvement du pôle (dpt) 0-2.5 cm Modèle IERS qq mm
Surcharge océanique (dol) |0-5 cm| Modèle U. Onsala mm
Surcharge atmosph. (dal) |0-1 cm| Modèle GGFC qq mm

RÉSOLUTION DES MESURES DE CODE ET DE PHASE
300
m
600
m
900
m
1200
m
1500
m
1800
m
2100
m
2x10
7m
2400
m׀ ׀ ׀ ׀ P(Y)30
0 m
600
m
900
m
1200
m
1500
m
1800
m
2100
m
2x10
7m
2400
m׀ ׀ ׀ ׀ C/A
L10,20 m
׀ ׀ ׀ ׀ ׀ ׀ ׀ ׀ ׀ ׀ ׀ ׀ ׀ ׀ ׀ ׀ ׀ ׀ ׀ ׀ ׀ ׀ ׀ ׀׀ ׀
׀ ׀ ׀ ׀׀ ׀׀ ׀ ׀ ׀ ׀ ׀ ׀ ׀
(échelle différente)
R. Santerre, SCG-CRG. U. Laval, juin 2015
9
COMBINAISONS DES OBSERVATIONS GPS L1, L2 & L5
Nom Symbole n m k a b d (cm) Kiono Kbruit
Bande L1 1 1 0 0 1 0 0 19.0 1 1
Bande L2 2 0 1 0 0 1 0 24.4 1.6 1.28
Bande L5 5 0 0 1 0 0 1 25.5 1.8 1.34
Bandes L1 & L2
Sans Iono. IF 1 -0.78 0 2.55 -1.55 0 48.4 0.0 3.2
Large WL 1 -1 0 4.53 -3.53 0 86.2 -1.3 6.4
Étroite NL 1 1 0 0.56 0.44 0 10.7 1.3 0.8
Bandes L1 & L5
Sans Iono. IF 1 0 -0.75 2.26 0 -1.26 43.0 0.0 2.8
Moyenne WL 1 0 -1 3.95 0 -2.95 75.1 -1.3 5.6
Bandes L2 & L5
Sans Iono. IF 0 1 -0.96 0 12.3 -11.3 299.3 0.0 21.8
Extra-Large WL 0 1 -1 0 24.0 -23.0 586.1 -1.04 43.6 R. Santerre, SCG-CRG. U. Laval, juin 2015
10
SOLUTION PPP «standard»
R. Santerre, SCG-CRG. U. Laval, juin 2015
1) Modélisation a priori de toutes les erreurs affectant les mesures de code et de phase du récepteur de l’utilisateur.
2) Estimation par moindres carrés (ou filtre de Kalman):- des coordonnées 3D à chaque époque en mode cinématique
(un seul jeu de coordonnées 3D en mode statique);- de l’erreur d’horloge du récepteur à chaque époque (ou éliminée en
effectuant une différence entre satellites);- du délai troposphérique (zénithal) au récepteur de l’utilisateur, estimé à
chaque heure, par exemple;- des ambiguïtés de phase, estimées à leurs valeurs réelles (non fixées
à des valeurs entières). N.B. Si un saut de cycle se produit, une nouvelle valeur d’ambiguïtés
doit être estimée (réinitialisation sur le satellite affecté).
11
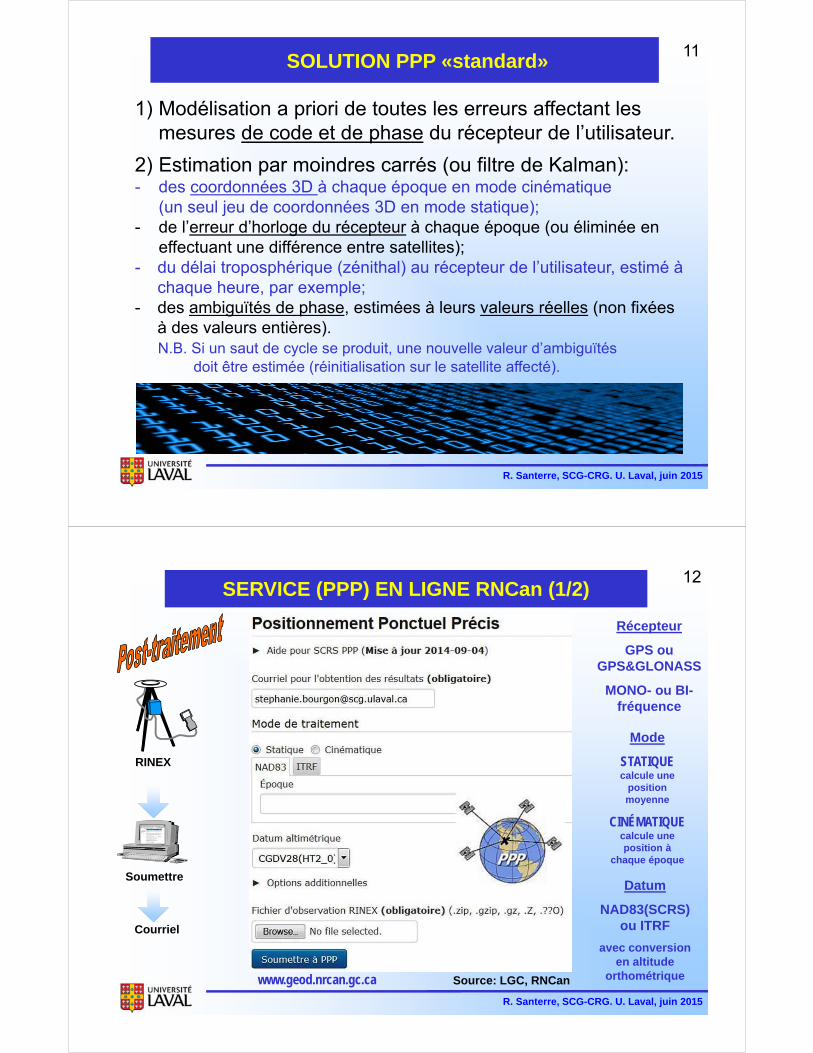
SERVICE (PPP) EN LIGNE RNCan (1/2)
Soumettre
Courriel
RINEX
Mode
STATIQUEcalcule une
position moyenne
CINÉMATIQUEcalcule uneposition à
chaque époque
Datum
NAD83(SCRS) ou ITRF
avec conversion en altitude
orthométrique
Récepteur
GPS ouGPS&GLONASS
MONO- ou BI-fréquence
www.geod.nrcan.gc.ca Source: LGC, RNCan
R. Santerre, SCG-CRG. U. Laval, juin 2015
12
00,10,20,30,40,50,60,70,80,9
11,11,21,31,41,5
00:00:00 06:00:00 12:00:00 18:00:00 00:00:00
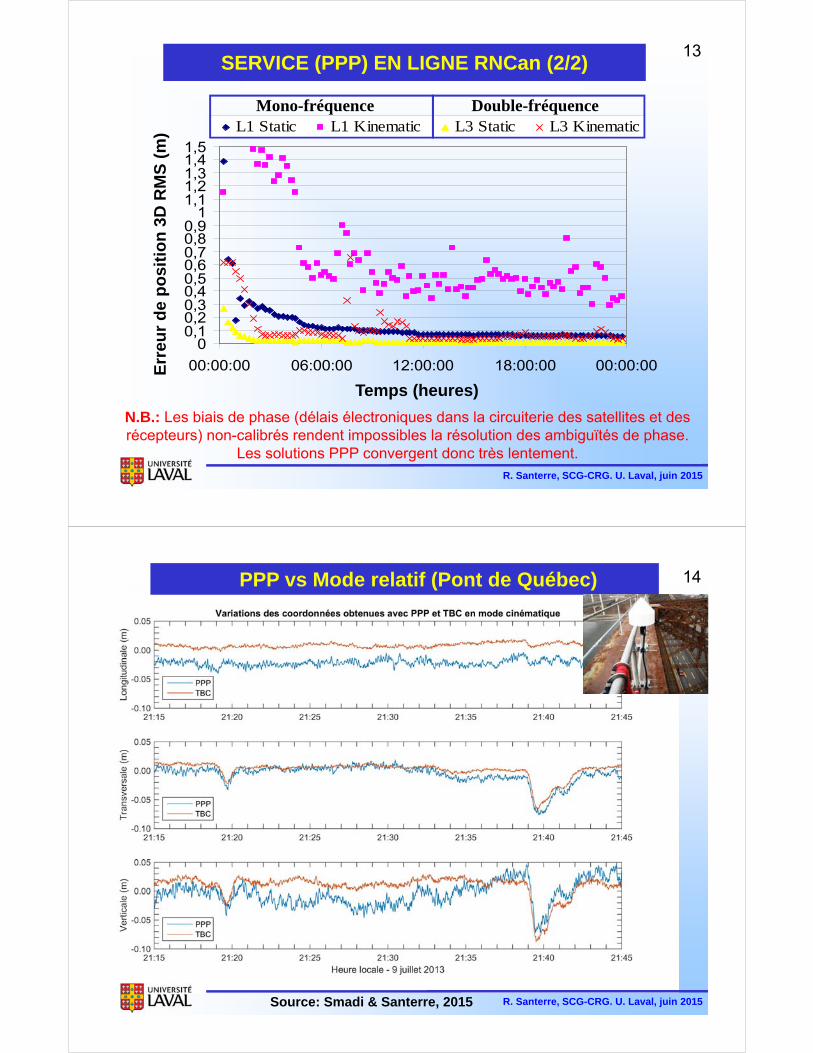
L1 Static L1 Kinematic L3 Static L3 Kinematic
Err
eur
de
po
siti
on
3D
RM
S (
m)
Temps (heures)
Mono-fréquence Double-fréquence
SERVICE (PPP) EN LIGNE RNCan (2/2)
N.B.: Les biais de phase (délais électroniques dans la circuiterie des satellites et des récepteurs) non-calibrés rendent impossibles la résolution des ambiguïtés de phase.
Les solutions PPP convergent donc très lentement.R. Santerre, SCG-CRG. U. Laval, juin 2015
13
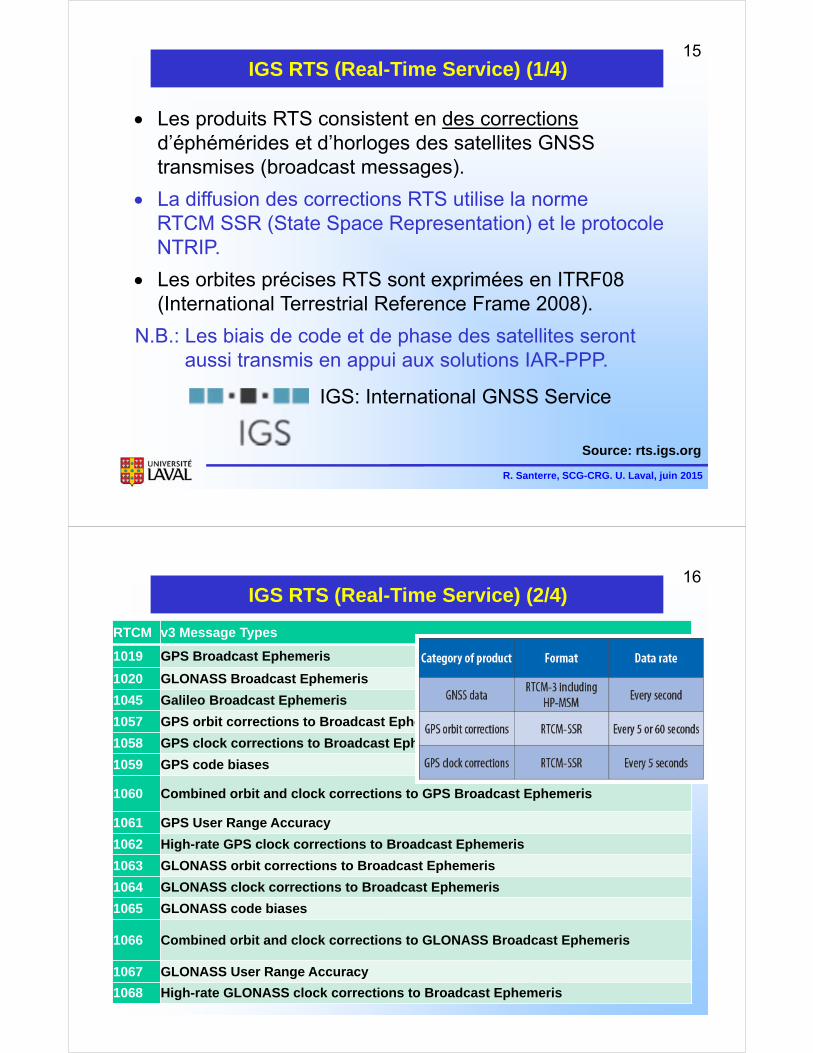
PPP vs Mode relatif (Pont de Québec)
Source: Smadi & Santerre, 2015 R. Santerre, SCG-CRG. U. Laval, juin 2015
14
IGS RTS (Real-Time Service) (1/4)
Source: rts.igs.org
Les produits RTS consistent en des corrections d’éphémérides et d’horloges des satellites GNSS transmises (broadcast messages).
La diffusion des corrections RTS utilise la norme RTCM SSR (State Space Representation) et le protocole NTRIP.
Les orbites précises RTS sont exprimées en ITRF08 (International Terrestrial Reference Frame 2008).
N.B.: Les biais de code et de phase des satellites seront aussi transmis en appui aux solutions IAR-PPP.
R. Santerre, SCG-CRG. U. Laval, juin 2015
IGS: International GNSS Service
15
IGS RTS (Real-Time Service) (2/4)
Source: rts.igs.org
RTCM v3 Message Types
1019 GPS Broadcast Ephemeris
1020 GLONASS Broadcast Ephemeris
1045 Galileo Broadcast Ephemeris
1057 GPS orbit corrections to Broadcast Ephemeris
1058 GPS clock corrections to Broadcast Ephemeris
1059 GPS code biases
1060 Combined orbit and clock corrections to GPS Broadcast Ephemeris
1061 GPS User Range Accuracy
1062 High-rate GPS clock corrections to Broadcast Ephemeris
1063 GLONASS orbit corrections to Broadcast Ephemeris
1064 GLONASS clock corrections to Broadcast Ephemeris
1065 GLONASS code biases
1066 Combined orbit and clock corrections to GLONASS Broadcast Ephemeris
1067 GLONASS User Range Accuracy
1068 High-rate GLONASS clock corrections to Broadcast Ephemeris
16
R. Santerre, SCG-CRG. U. Laval, juin 2015
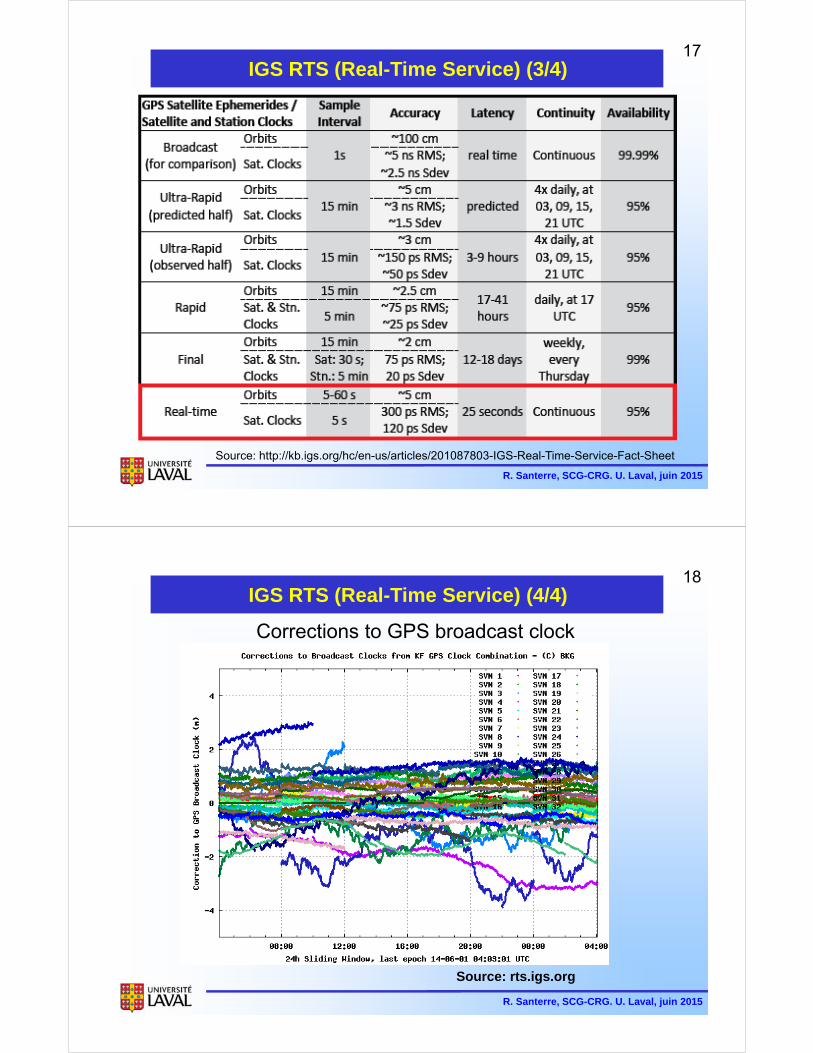
Source: http://kb.igs.org/hc/en-us/articles/201087803-IGS-Real-Time-Service-Fact-Sheet
IGS RTS (Real-Time Service) (3/4)17
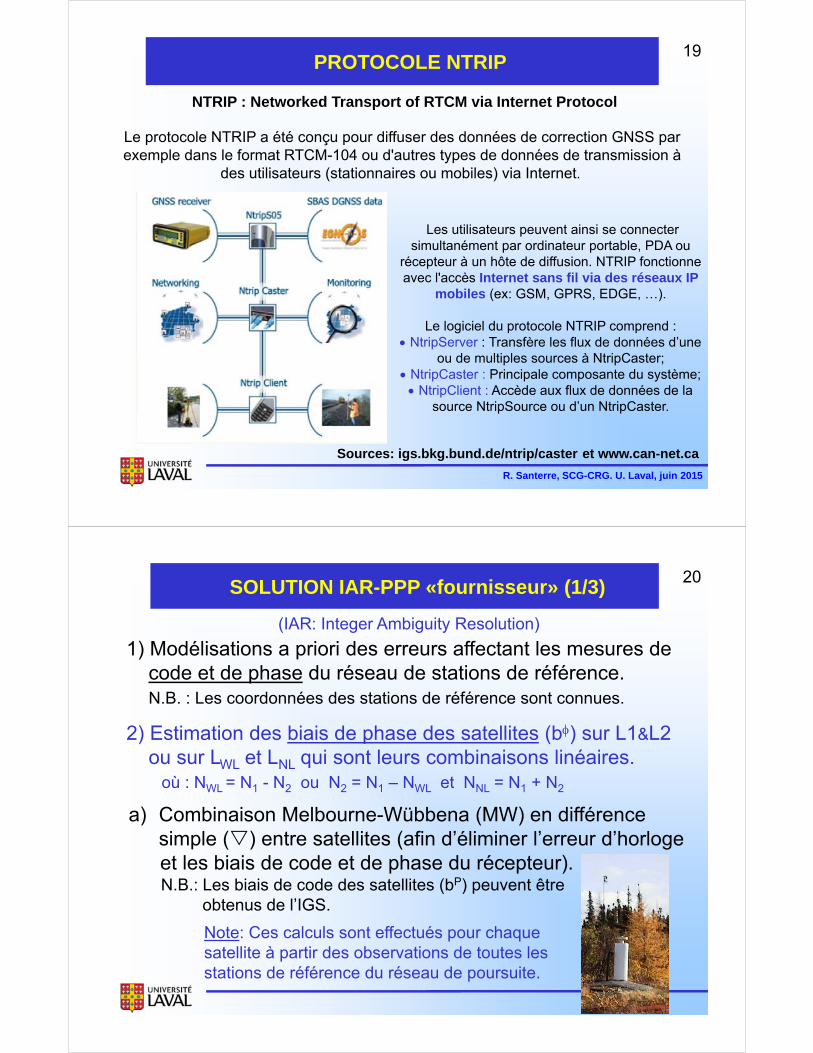
Corrections to GPS broadcast clock
Source: rts.igs.org
R. Santerre, SCG-CRG. U. Laval, juin 2015
IGS RTS (Real-Time Service) (4/4)18
PROTOCOLE NTRIP
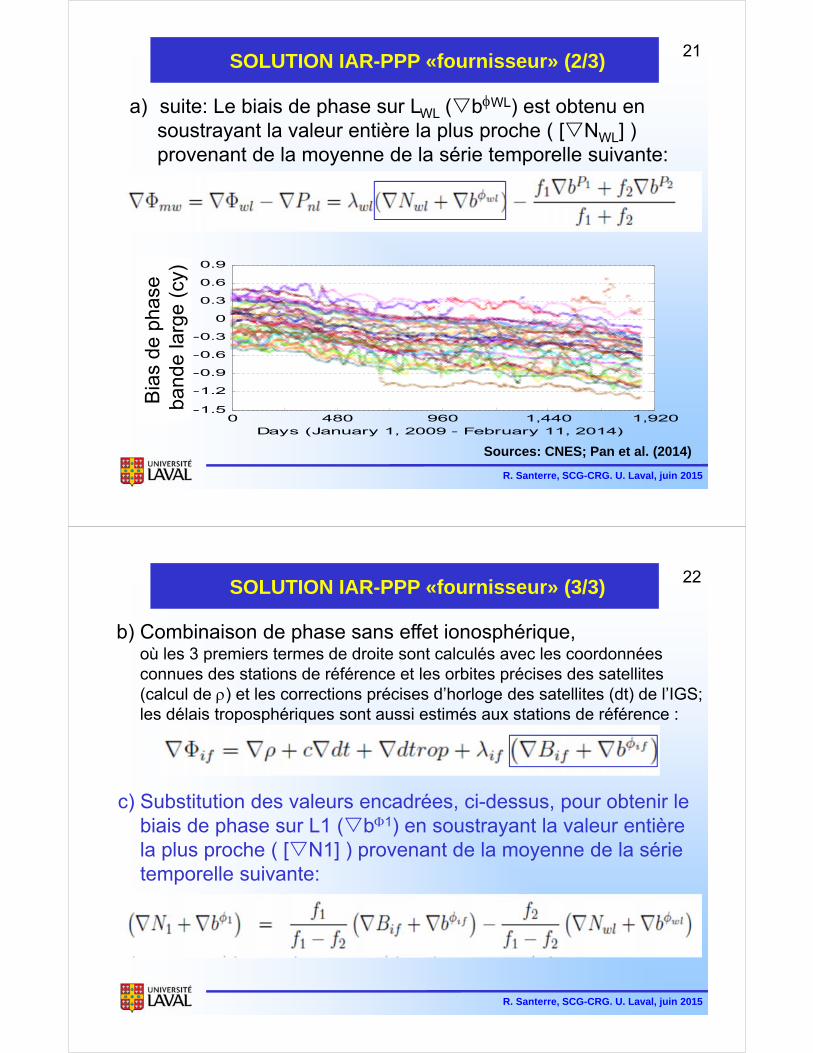
Sources: igs.bkg.bund.de/ntrip/caster et www.can-net.ca
Les utilisateurs peuvent ainsi se connecter simultanément par ordinateur portable, PDA ou
récepteur à un hôte de diffusion. NTRIP fonctionne avec l'accès Internet sans fil via des réseaux IP
mobiles (ex: GSM, GPRS, EDGE, …).
Le logiciel du protocole NTRIP comprend : NtripServer : Transfère les flux de données d’une
ou de multiples sources à NtripCaster; NtripCaster : Principale composante du système; NtripClient : Accède aux flux de données de la
source NtripSource ou d’un NtripCaster.
NTRIP : Networked Transport of RTCM via Internet Protocol
Le protocole NTRIP a été conçu pour diffuser des données de correction GNSS par exemple dans le format RTCM-104 ou d'autres types de données de transmission à
des utilisateurs (stationnaires ou mobiles) via Internet.
R. Santerre, SCG-CRG. U. Laval, juin 2015
19
SOLUTION IAR-PPP «fournisseur» (1/3)
1) Modélisations a priori des erreurs affectant les mesures de code et de phase du réseau de stations de référence. N.B. : Les coordonnées des stations de référence sont connues.
2) Estimation des biais de phase des satellites (b) sur L1&L2ou sur LWL et LNL qui sont leurs combinaisons linéaires.
où : NWL = N1 - N2 ou N2 = N1 – NWL et NNL = N1 + N2
a) Combinaison Melbourne-Wübbena (MW) en différence simple () entre satellites (afin d’éliminer l’erreur d’horlogeet les biais de code et de phase du récepteur).N.B.: Les biais de code des satellites (bP) peuvent être
obtenus de l’IGS.
Note: Ces calculs sont effectués pour chaque satellite à partir des observations de toutes les stations de référence du réseau de poursuite.
20
(IAR: Integer Ambiguity Resolution)
SOLUTION IAR-PPP «fournisseur» (2/3)
R. Santerre, SCG-CRG. U. Laval, juin 2015
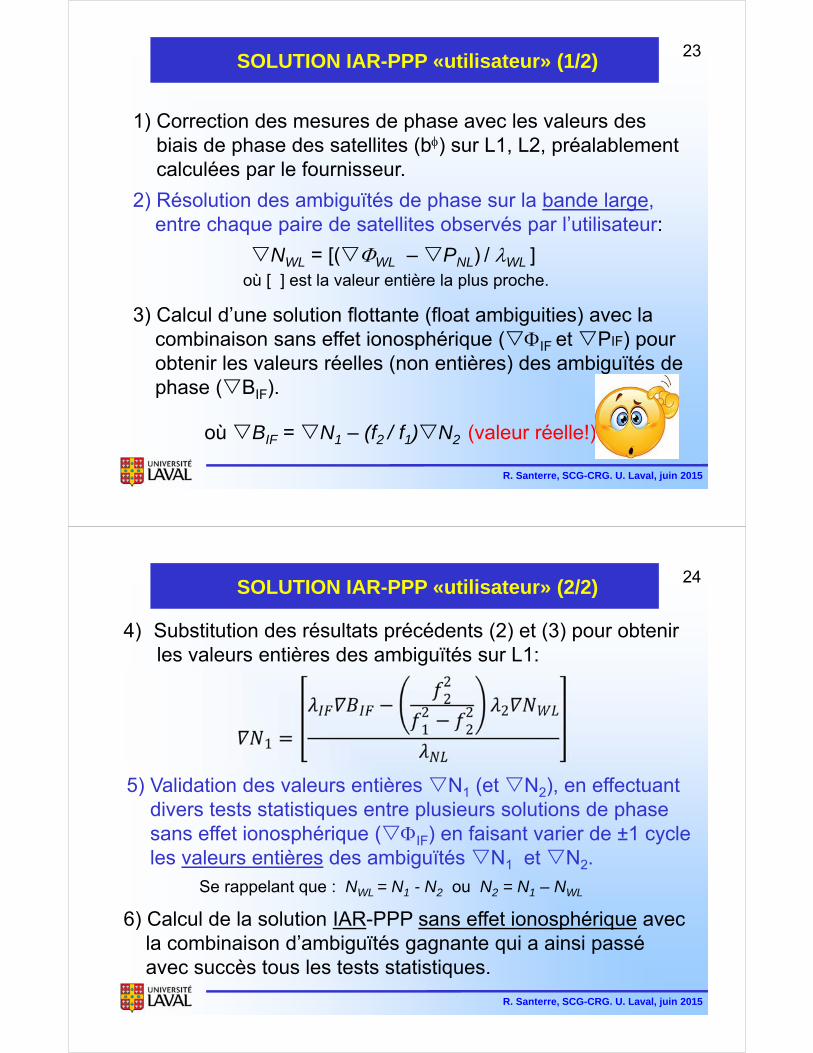
a) suite: Le biais de phase sur LWL (bWL) est obtenu en soustrayant la valeur entière la plus proche ( [NWL] ) provenant de la moyenne de la série temporelle suivante:
Sources: CNES; Pan et al. (2014)
0 480 960 1,440 1,920-1.5
-1.2
-0.9
-0.6
-0.3
0
0.3
0.6
0.9
Days (January 1, 2009 - February 11, 2014)
Wide-lane FCB Corr. (cycle)
21
Bia
s de
pha
seba
nde
larg
e (c
y)
SOLUTION IAR-PPP «fournisseur» (3/3)
R. Santerre, SCG-CRG. U. Laval, juin 2015
b) Combinaison de phase sans effet ionosphérique, où les 3 premiers termes de droite sont calculés avec les coordonnées connues des stations de référence et les orbites précises des satellites (calcul de ) et les corrections précises d’horloge des satellites (dt) de l’IGS; les délais troposphériques sont aussi estimés aux stations de référence :
c) Substitution des valeurs encadrées, ci-dessus, pour obtenir le biais de phase sur L1 (b1) en soustrayant la valeur entière la plus proche ( [N1] ) provenant de la moyenne de la série temporelle suivante:
22
SOLUTION IAR-PPP «utilisateur» (1/2)
R. Santerre, SCG-CRG. U. Laval, juin 2015
1) Correction des mesures de phase avec les valeurs des biais de phase des satellites (b) sur L1, L2, préalablement calculées par le fournisseur.
2) Résolution des ambiguïtés de phase sur la bande large, entre chaque paire de satellites observés par l’utilisateur:
NWL = [(WL – PNL) / WL ] où [ ] est la valeur entière la plus proche.
où BIF = N1 – (f2 / f1)N2 (valeur réelle!)
3) Calcul d’une solution flottante (float ambiguities) avec la combinaison sans effet ionosphérique (IF et PIF) pour obtenir les valeurs réelles (non entières) des ambiguïtés de phase (BIF).
23
SOLUTION IAR-PPP «utilisateur» (2/2)
R. Santerre, SCG-CRG. U. Laval, juin 2015
4) Substitution des résultats précédents (2) et (3) pour obtenir les valeurs entières des ambiguïtés sur L1:
5) Validation des valeurs entières N1 (et N2), en effectuant divers tests statistiques entre plusieurs solutions de phase sans effet ionosphérique (IF) en faisant varier de ±1 cycle les valeurs entières des ambiguïtés N1 et N2.
Se rappelant que : NWL = N1 - N2 ou N2 = N1 – NWL
6) Calcul de la solution IAR-PPP sans effet ionosphérique avec la combinaison d’ambiguïtés gagnante qui a ainsi passé avec succès tous les tests statistiques.
24
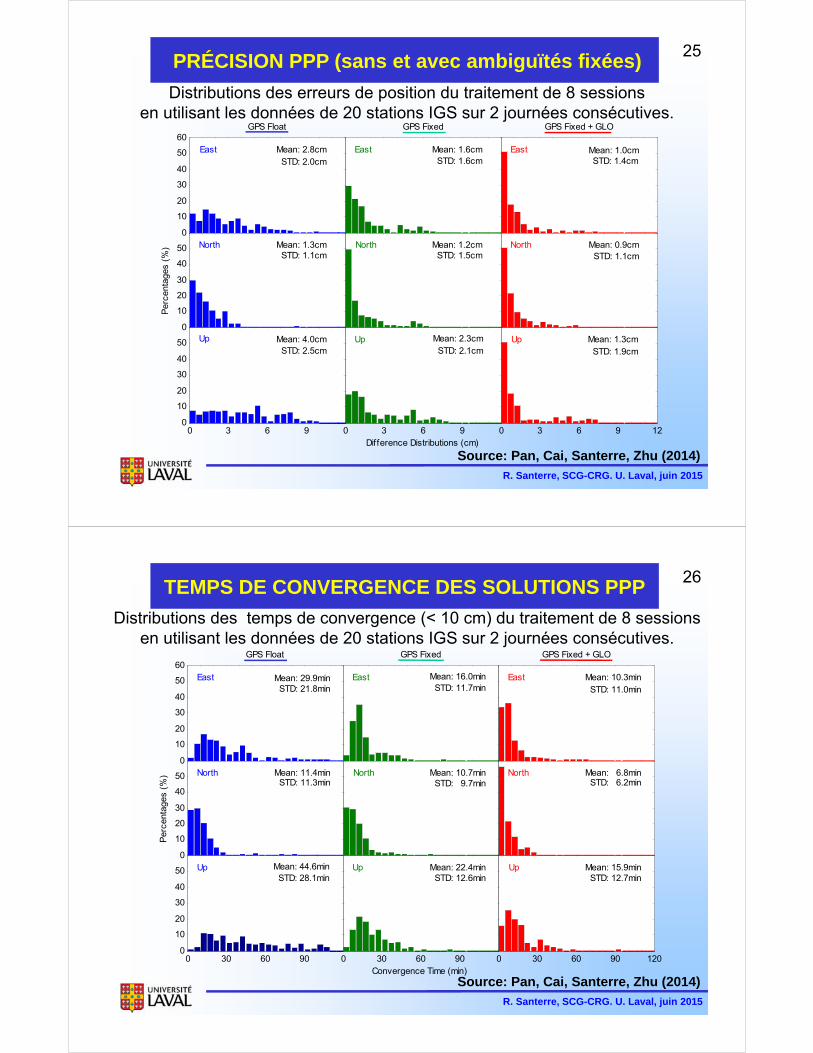
PRÉCISION PPP (sans et avec ambiguïtés fixées)
R. Santerre, SCG-CRG. U. Laval, juin 2015
0
10
20
30
40
50
60GPS Float
0
10
20
30
40
50
Per
cent
ages
(%
)
0 3 6 90
10
20
30
40
50
GPS Fixed
0 3 6 9Difference Distributions (cm)
GPS Fixed + GLO
0 3 6 9 12
Up
North
East East
North
UpUp
North
EastMean: 2.8cmSTD: 2.0cm
Mean: 1.3cmSTD: 1.1cm
Mean: 4.0cmSTD: 2.5cm
Mean: 1.6cmSTD: 1.6cm
Mean: 1.2cmSTD: 1.5cm
Mean: 2.3cmSTD: 2.1cm
Mean: 1.0cmSTD: 1.4cm
Mean: 0.9cmSTD: 1.1cm
Mean: 1.3cmSTD: 1.9cm
Distributions des erreurs de position du traitement de 8 sessionsen utilisant les données de 20 stations IGS sur 2 journées consécutives.
Source: Pan, Cai, Santerre, Zhu (2014)
25
R. Santerre, SCG-CRG. U. Laval, juin 2015
0
10
20
30
40
50
60GPS Float
0
10
20
30
40
50
Per
cent
ages
(%
)
0 30 60 900
10
20
30
40
50
GPS Fixed
0 30 60 90Convergence Time (min)
GPS Fixed + GLO
0 30 60 90 120
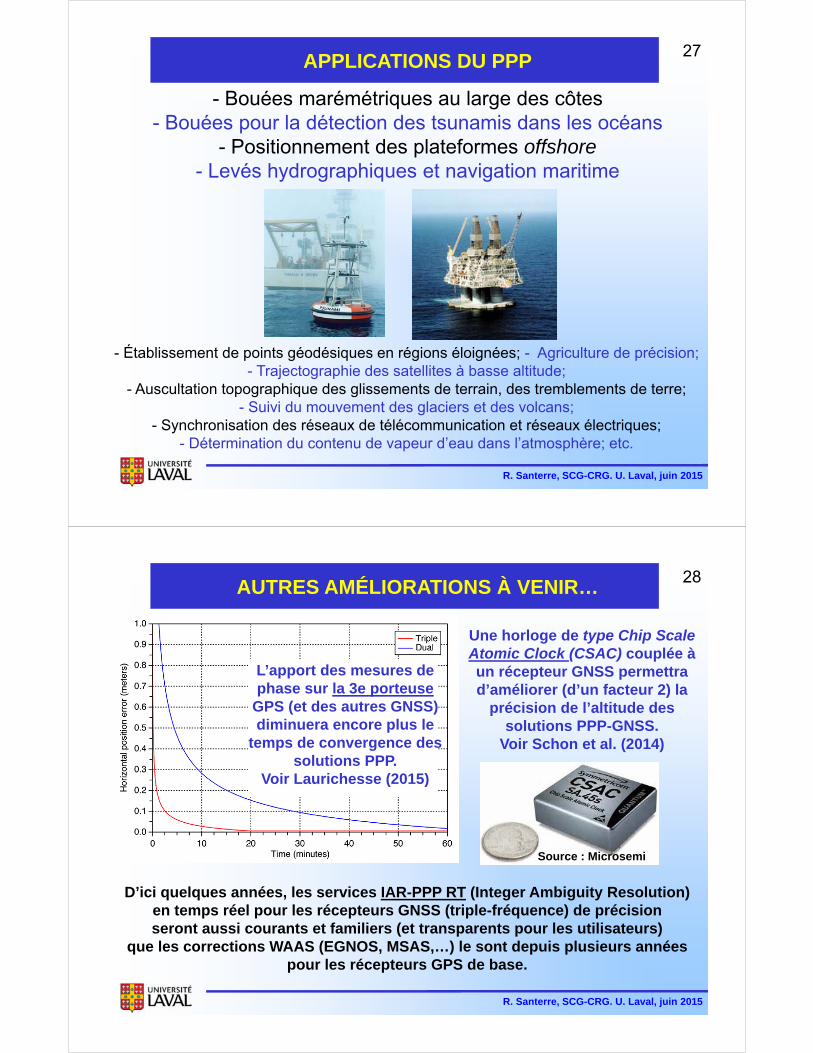
STD: 21.8minMean: 29.9min
Mean: 11.4minSTD: 11.3min
Mean: 44.6minSTD: 28.1min
Mean: 16.0minSTD: 11.7min
Mean: 10.7minSTD: 9.7min
Mean: 22.4minSTD: 12.6min
Mean: 10.3minSTD: 11.0min
STD: 6.2minMean: 6.8min
Mean: 15.9minSTD: 12.7min
North
East
Up Up
North
East East
North
Up
TEMPS DE CONVERGENCE DES SOLUTIONS PPP26
Source: Pan, Cai, Santerre, Zhu (2014)
Distributions des temps de convergence (< 10 cm) du traitement de 8 sessionsen utilisant les données de 20 stations IGS sur 2 journées consécutives.
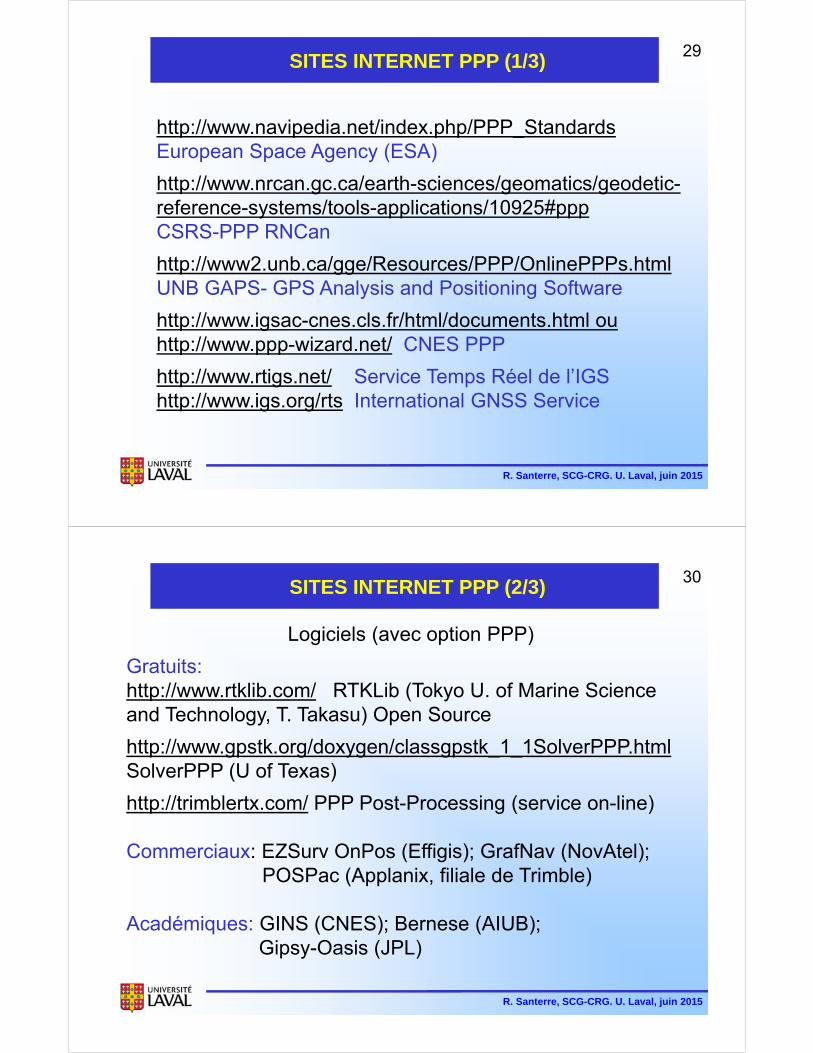
APPLICATIONS DU PPP
R. Santerre, SCG-CRG. U. Laval, juin 2015
- Bouées marémétriques au large des côtes- Bouées pour la détection des tsunamis dans les océans
- Positionnement des plateformes offshore- Levés hydrographiques et navigation maritime
- Établissement de points géodésiques en régions éloignées; - Agriculture de précision;- Trajectographie des satellites à basse altitude;
- Auscultation topographique des glissements de terrain, des tremblements de terre;- Suivi du mouvement des glaciers et des volcans;
- Synchronisation des réseaux de télécommunication et réseaux électriques;- Détermination du contenu de vapeur d’eau dans l’atmosphère; etc.
27
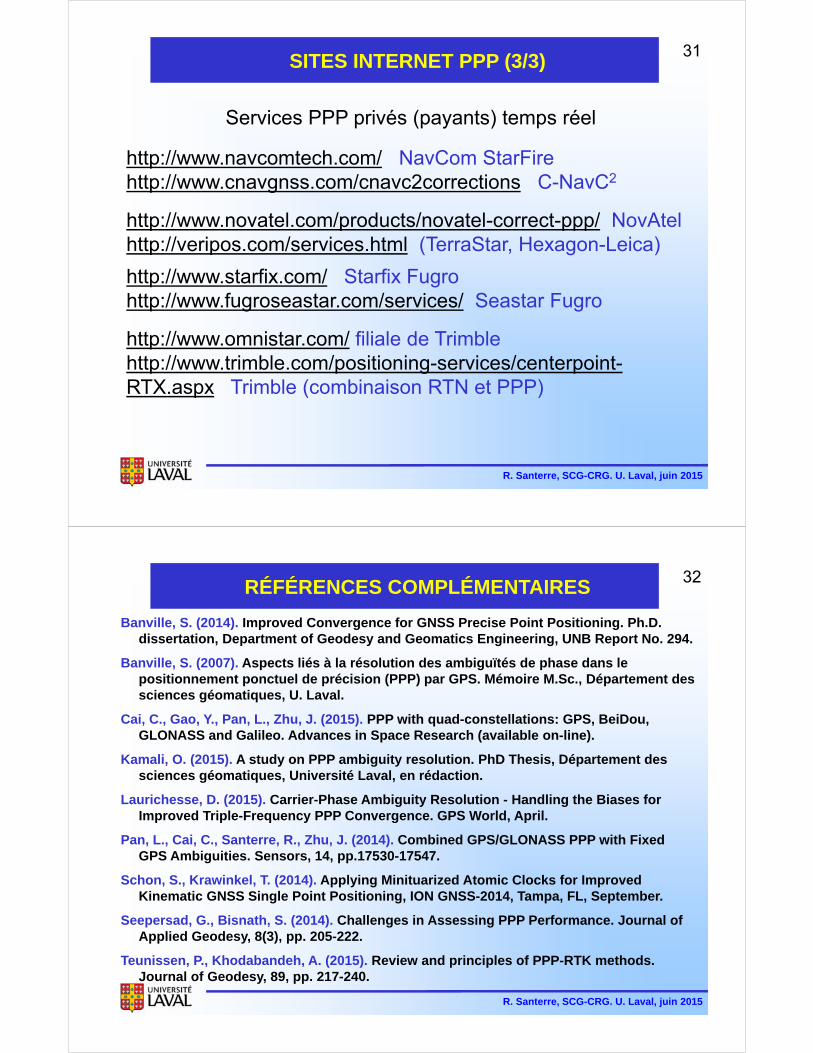
AUTRES AMÉLIORATIONS À VENIR…
R. Santerre, SCG-CRG. U. Laval, juin 2015
Une horloge de type Chip Scale Atomic Clock (CSAC) couplée à un récepteur GNSS permettra d’améliorer (d’un facteur 2) la
précision de l’altitude des solutions PPP-GNSS.
Voir Schon et al. (2014)
Source : Microsemi
L’apport des mesures de phase sur la 3e porteuse
GPS (et des autres GNSS) diminuera encore plus le
temps de convergence des solutions PPP.
Voir Laurichesse (2015)
D’ici quelques années, les services IAR-PPP RT (Integer Ambiguity Resolution) en temps réel pour les récepteurs GNSS (triple-fréquence) de précisionseront aussi courants et familiers (et transparents pour les utilisateurs)
que les corrections WAAS (EGNOS, MSAS,…) le sont depuis plusieurs années pour les récepteurs GPS de base.
28
SITES INTERNET PPP (1/3)
R. Santerre, SCG-CRG. U. Laval, juin 2015
http://www.navipedia.net/index.php/PPP_StandardsEuropean Space Agency (ESA)
http://www.nrcan.gc.ca/earth-sciences/geomatics/geodetic-reference-systems/tools-applications/10925#pppCSRS-PPP RNCan
http://www2.unb.ca/gge/Resources/PPP/OnlinePPPs.htmlUNB GAPS- GPS Analysis and Positioning Software
http://www.igsac-cnes.cls.fr/html/documents.html ou http://www.ppp-wizard.net/ CNES PPP
http://www.rtigs.net/ Service Temps Réel de l’IGShttp://www.igs.org/rts International GNSS Service
29
SITES INTERNET PPP (2/3)
R. Santerre, SCG-CRG. U. Laval, juin 2015
Logiciels (avec option PPP)
Gratuits: http://www.rtklib.com/ RTKLib (Tokyo U. of Marine Science and Technology, T. Takasu) Open Source
http://www.gpstk.org/doxygen/classgpstk_1_1SolverPPP.htmlSolverPPP (U of Texas)
http://trimblertx.com/ PPP Post-Processing (service on-line)
Commerciaux: EZSurv OnPos (Effigis); GrafNav (NovAtel);POSPac (Applanix, filiale de Trimble)
Académiques: GINS (CNES); Bernese (AIUB);Gipsy-Oasis (JPL)
30
SITES INTERNET PPP (3/3)
R. Santerre, SCG-CRG. U. Laval, juin 2015
Services PPP privés (payants) temps réel
http://www.navcomtech.com/ NavCom StarFirehttp://www.cnavgnss.com/cnavc2corrections C-NavC2
http://www.novatel.com/products/novatel-correct-ppp/ NovAtelhttp://veripos.com/services.html (TerraStar, Hexagon-Leica)
http://www.starfix.com/ Starfix Fugrohttp://www.fugroseastar.com/services/ Seastar Fugro
http://www.omnistar.com/ filiale de Trimblehttp://www.trimble.com/positioning-services/centerpoint-RTX.aspx Trimble (combinaison RTN et PPP)
31
RÉFÉRENCES COMPLÉMENTAIRES
R. Santerre, SCG-CRG. U. Laval, juin 2015
Banville, S. (2014). Improved Convergence for GNSS Precise Point Positioning. Ph.D. dissertation, Department of Geodesy and Geomatics Engineering, UNB Report No. 294.
Banville, S. (2007). Aspects liés à la résolution des ambiguïtés de phase dans le positionnement ponctuel de précision (PPP) par GPS. Mémoire M.Sc., Département des sciences géomatiques, U. Laval.
Cai, C., Gao, Y., Pan, L., Zhu, J. (2015). PPP with quad-constellations: GPS, BeiDou, GLONASS and Galileo. Advances in Space Research (available on-line).
Kamali, O. (2015). A study on PPP ambiguity resolution. PhD Thesis, Département des sciences géomatiques, Université Laval, en rédaction.
Laurichesse, D. (2015). Carrier-Phase Ambiguity Resolution - Handling the Biases for Improved Triple-Frequency PPP Convergence. GPS World, April.
Pan, L., Cai, C., Santerre, R., Zhu, J. (2014). Combined GPS/GLONASS PPP with Fixed GPS Ambiguities. Sensors, 14, pp.17530-17547.
Schon, S., Krawinkel, T. (2014). Applying Minituarized Atomic Clocks for Improved Kinematic GNSS Single Point Positioning, ION GNSS-2014, Tampa, FL, September.
Seepersad, G., Bisnath, S. (2014). Challenges in Assessing PPP Performance. Journal of Applied Geodesy, 8(3), pp. 205-222.
Teunissen, P., Khodabandeh, A. (2015). Review and principles of PPP-RTK methods. Journal of Geodesy, 89, pp. 217-240.
32