-
1re Journe du GT8 Robotique et NeurosciencesJeudi 23 juin 2011,
Paris
Bruno MANTEL
Laboratoire IBISC
Universit dvry Val dEssonne
Percevoir pour agir avec un robot tloprPrincipes cologiques et
conception dinterface
-
1re Journe du GT8 Robotique et Neurosciences - 23 juin 2011,
Paris
Approche cologique Tlopration & conception dIHM Exemple
-
1
Approche cologique Tlopration & conception dIHM Exemple
Point dentre
Comment ?
Comment peroit-on ?
Quelle sont les processus sous-jacents au sein de lorganisme
?
Quoi ?
Quest-ce qui est peru ?
Quelle est l'information disponible propos du monde que nos sens
peuvent prlever ?
(Gibson, 1966; 1979;
Reed, 1996;
Michaels & Carello, 1981;
Shaw & McIntyre, 1974;
Shaw & Bransford, 1977)
Contenu et forme
1re Journe du GT8 Robotique et Neurosciences - 23 juin 2011,
Paris
-
2
Approche cologique Tlopration & conception dIHM Exemple
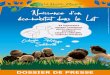
Information disponible : Contenu
Perspective fonctionnelle
Proprits des objets
opportunits daction
affordances
relations : proprits des objets & proprits de lagent
67 cm
Franchissable ?
Taille(ex: longueur jambes) Force
Vitesse
1re Journe du GT8 Robotique et Neurosciences - 23 juin 2011,
Paris
-
3
Information disponible : Contenu
Les affordances
proprits relationnelles du systme Agent-Environnement
dfinissent les actions possibles, efficientes, confortables,
etc.
peuvent tre caractrises de diffrentes faons :
contraintes gomtriques, cinmatiques, cintiques,
sont relles; ne sont pas des constructions mentales
existent, quelles soient perues ou non
1re Journe du GT8 Robotique et Neurosciences - 23 juin 2011,
Paris
systmeAgent-Environnement
propritsrelationnelles
Approche cologique Tlopration & conception dIHM Exemple
-
4
Approche cologique Tlopration & conception dIHM Exemple
Information disponible : Forme
structure des nergies ambiantes (optique, acoustique, haptique,
)
spcifie les rgularits du systmes Agent-Environnement
Ex: lumire ambiante configuration optique
1re Journe du GT8 Robotique et Neurosciences - 23 juin 2011,
Paris
(Gibson, 1979)
-
mouvementsConsquences
optiques
5
Approche cologique Tlopration & conception dIHM Exemple
Information disponible : Forme
Ex: lumire ambiante flux optique
Constance de la forme,malgr le changement
de point de vue
dclairage
1re Journe du GT8 Robotique et Neurosciences - 23 juin 2011,
Paris
Signature du mouvement
Se rapprocherexpansion
Se pencherrotation
Se dplacerlatralement
translation
-
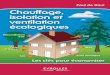
Hauteur des yeuxH
Largeur de louverture
O
Niveaux des yeux& horizon
Sol plat horizontal
6
Approche cologique Tlopration & conception dIHM Exemple
Information disponible : Forme
Ex: spcification de la passabilit
O
H
1re Journe du GT8 Robotique et Neurosciences - 23 juin 2011,
Paris
=tan
2 tan /2
O
E= c
tan
2 tan /2
Largeur dpaules E
si H = c.E
-
7
Approche cologique Tlopration & conception dIHM Exemple
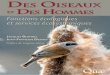
Information disponible : Forme
Ex: spcification de la directiondu mouvement (translation)
1re Journe du GT8 Robotique et Neurosciences - 23 juin 2011,
Paris
Ex: spcification du temps de pr-contact (TTC) via
sur les ctsstructure laminaire
devantstructure radiale
= TTC = D
V
t
e =
D
Vte
mouvement
-
8
Approche cologique Tlopration & conception dIHM Exemple
Information disponible : rgulation du mouvement
contrle prospectif contrle "en ligne"(slection) (rgulation
pendant lexcution)
pas besoin de reconstruire un modle interne de
lenvironnement
exploitation de mappings existants (propres chaque action) :
variable perceptives variables motrices
lois de contrle
1re Journe du GT8 Robotique et Neurosciences - 23 juin 2011,
Paris
(Gibson, 1958, 1979;
Warren, 1988, 2006)
-
9
Approche cologique Tlopration & conception dIHM Exemple
1re Journe du GT8 Robotique et Neurosciences - 23 juin 2011,
Paris
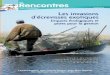
Proprits relationnelles du systme A-E Affordances
Rglesde contrle
Invariants de lastimulation
Affordancesspcifies
Loisde contrle
spcification (mapping 1:1)
dtection (mapping ?)
Structures dtectes
Action excutesForces
SystmeAgent-Environnement
(A-E)
Modes daction
Information disponible
En rsum
-
10
Approche cologique Tlopration & conception dIHM Exemple
1re Journe du GT8 Robotique et Neurosciences - 23 juin 2011,
Paris
Constat
Ajout dune plateforme console+robot dans la boucle :
altration des affordances et rgles de contrle
altration de la structure de la stimulation
-
11
Approche cologique Tlopration & conception dIHM Exemple
1re Journe du GT8 Robotique et Neurosciences - 23 juin 2011,
Paris
Conception dIHM
Quels capteurs, priphriques, traitements?
Comment prsenter les donnes ?
Perspective cologique (fonctionnelle)
Quelle est finalit de la plateforme de tlopration ?
Pourquoi est-elle conue ? Dans quel but ?
Les limitations technologiques, humaines, et celles des systmes
de contrle sont des considrations importantes, mais leur porte ne
peut tre apprcie qu'au regard des exigences fonctionnelles du
domaine de travail considr.
(Flach et al., 1998, p.237)
-
12
Approche cologique Tlopration & conception dIHM Exemple
1re Journe du GT8 Robotique et Neurosciences - 23 juin 2011,
Paris
Conception dIHM : dmarche cologique
Etape 1 : identification des modes d'action
Etape 2 : caractrisation des affordances et rgles de contrles
associes
Etape 3 : amnagement de la plateforme de tlopration
pour que ces proprits soient spcifies
- anthropomorphisme
- augmentation de linformation
- augmentation de laction
pour compenser le fait de ne pas les spcifier
- dlgation
-
13
Approche cologique Tlopration & conception dIHM Exemple
1re Journe du GT8 Robotique et Neurosciences - 23 juin 2011,
Paris
Problmatique
Robot mobile, au domicile dune personne en perte dautonomie
Navigation du robot, localisation de la personne, communication
avec celle-ci
Robot : prototype Lina (Droids Company)
Oprateurs: SAMU, mdecins, membres de la famille
Console : PC avec cran, souris, clavier
-
14
Approche cologique Tlopration & conception dIHM Exemple
1re Journe du GT8 Robotique et Neurosciences - 23 juin 2011,
Paris
Identification et caractrisation des modes daction
littrature abondante
Ex:- dmarrer, sarrter- aller vers un but- viter un obstacle-
freiner- poursuivre et fuir, intercepter- suivre un couloir-
franchir une ouverture- tourner de faon saligner avec une ligne
droite- etc.
(Gibson & Crooks, 1938;
Gibson 1958;
Lee & Lishman, 1977;
Warren, 1998;
Loomis & Beall, 1998;
Fajen & Warren, 2003)
-
15
Approche cologique Tlopration & conception dIHM Exemple
1re Journe du GT8 Robotique et Neurosciences - 23 juin 2011,
Paris
-
15 1re Journe du GT8 Robotique et Neurosciences - 23 juin 2011,
Paris
Approche cologique Tlopration & conception dIHM Exemple
-
15 1re Journe du GT8 Robotique et Neurosciences - 23 juin 2011,
Paris
Approche cologique Tlopration & conception dIHM Exemple
-
15 1re Journe du GT8 Robotique et Neurosciences - 23 juin 2011,
Paris
Approche cologique Tlopration & conception dIHM Exemple
-
15 1re Journe du GT8 Robotique et Neurosciences - 23 juin 2011,
Paris
Approche cologique Tlopration & conception dIHM Exemple
-
15 1re Journe du GT8 Robotique et Neurosciences - 23 juin 2011,
Paris
Approche cologique Tlopration & conception dIHM Exemple
-
15 1re Journe du GT8 Robotique et Neurosciences - 23 juin 2011,
Paris
Approche cologique Tlopration & conception dIHM Exemple
-
16
Approche cologique Tlopration & conception dIHM Exemple
1re Journe du GT8 Robotique et Neurosciences - 23 juin 2011,
Paris
-
16 1re Journe du GT8 Robotique et Neurosciences - 23 juin 2011,
Paris
Approche cologique Tlopration & conception dIHM Exemple
-
16 1re Journe du GT8 Robotique et Neurosciences - 23 juin 2011,
Paris
Approche cologique Tlopration & conception dIHM Exemple
-
1re Journe du GT8 Robotique et Neurosciences - 23 juin 2011,
Paris
Approche cologique Tlopration & conception dIHM Exemple
Merci !