Embed Size (px)
Citation preview

PT DS N°2 : Correction SII
1
A : L’ascenseur du pilier nord de la tour Eiffel
QA.1. Déterminer l’expression littérale de l’énergie cinétique du système isolé E par rapport au repère lié au sol supposé Galiléen, en fonction de red , Mc, Mp, Mcp, Jp et Rp.
avec , soit :
Alors :
QA.2.
Ec,E/0
=1
2M
c+ M
p+
Mcp
16
æ
èç
ö
ø÷ R
p
2 + 4Jp
é
ë
êê
ù
û
úú
Jeq
wred
2
QA.2. En déduire l’expression de l’inertie équivalente ramenée sur l’arbre du réducteur Jeq.
Jeq
= MC
+ MP
+M
CP
16
æ
èç
ö
ø÷ R2
P+ 4J
P
QA.3. Appliquer le théorème de l’énergie cinétique au système isolé E pour déterminer
l’expression littérale du couple Cred→pm exercé par l’arbre de sortie du réducteur sur les poulies motrices.
Puissances extérieures :
( ) 20/ 0 sin poids c p E c p red pP M M g R
( ) / 0 01 sin 4
cp
poids contrepoids E red p
MP g R
Puissances intérieures : nulles. Alors, l’application du théorème de l’énergie cinétique donne :
Jeqw
redw
red= C
red.w
red+
Mcp
4
æ
èç
ö
ø÷ gsin a
10( )w redR
p- M
c+ M
p( ) gsin a20( )w red
Rp
20 10 sin sin 4
cp
red eq red p c p
MC J gR M M
, /0 , /0 , /0 , /0c E c chariot passagrs c poulie c contrepoidsE E E E
2
, /0
1
2c chariot passagrs c pE M M V .p redV R
2 2
, /0
1
2c chariot passagrs c p red pE M M R
2
, /0
14
2c poulie p redE J
2
2 2
, /0
1 1
2 4 2 16
cp
c contrepoids cp p red
MVE M R
.red red redP C
PT DS N°2 : Correction SII
2
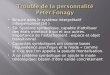
QA.4. Exprimer le couple maxi Cred→pm en fonction de , des angles et de Jeq et des
différentes caractéristiques de masse, d’inertie et de longueur.
On a wred
=a
max
Rp
. Donc : Cred
= Jeq
amax
Rp
+ gRp
Mc+ M
p( ) sin a12( ) -
Mcp
4
æ
èç
ö
ø÷ sin a
01( )æ
èç
ö
ø÷
QA.5. Donner l’expression du couple résistant ramené sur l’arbre moteur Cres en fonction de
η, k et Cred/pm. Le couple résistant ramené sur l’arbre moteur correspond au couple exercé par le réducteur sur l’arbre moteur
On a m
red
k
donc
red pm
res
CC
k
QA.6. En appliquant le principe fondamental de la dynamique à l’arbre du moteur, calculer le
couple moteur Cm pour cette phase d’accélération. On applique le PFD appliqué à l’arbre moteur et on écrit l’équation du moment autour de l’axe de rotation (en un point de l’axe et en projection sur l’axe) :
avec Alors :
AN : 6100 .mC N m
QA.7. Conclure quant au choix de cette machine de traction.
Un calcul rapide avec les données constructeur du moteur en régime nominal nous donne
7000 .mm
m
PC N m
En régime permanent, le couple nécessaire est de 6100 N.m, le couple nominal de la machine est de 7000 N.m Cela convient.
amax
a10
a20
Jqm
= Cm
-C
red
hkq
m= k.
amax
Rp
max. redm
p
a CC Jk
R k
Moteur Réducteur η
Cmm Cresm Credred = ηCresm
PT DS N°2 : Correction SII
3
B : Vision en réalité augmentée pour hélicoptère
QB.1. Liaison équivalente
Il y a en série 2 liaisons pivot d'axe orthogonaux et concourants en P. Le torseur cinématique équivalent
résulte de la somme des torseurs cinématiques exprimés au point P soit :
{𝑉𝑙𝑒𝑞} = {𝛺𝑐ℎ𝑎𝑟𝑔𝑒 𝑝𝑜𝑟𝑡𝑒𝑢𝑟⁄ = 𝜃𝑎𝑝
𝑧𝑎 + 𝜃𝑒𝑎 𝑦𝑎
𝑉𝑃,𝑐ℎ𝑎𝑟𝑔𝑒 𝑝𝑜𝑟𝑡𝑒𝑢𝑟⁄ = 0
}.
C'est le torseur d'une liaison rotule à doigt de centre P d'axe(𝑃, 𝑦𝑎 )et de normale 𝑧𝑎 .
QB.2. Rôle de l'algorithme implanté dans le calculateur
La tête du pilote dispose d'une mobilité supplémentaire il est donc nécessaire que l'algorithme du calculateur
intègre les informations de position de la tête du pilote par rapport au porteur (en particulier la position
angulaire suivant la mobilité supplémentaire) fournies par le sous système de détection des postures
implanté dans le casque afin de reproduire cela au niveau de l'affichage de l'image.
QB.3. Degré d'hyperstatisme et liaison équivalente
Il y a 2 liaisons rotules en parallèle, la liaison équivalente est une liaison pivot d'axe(𝐶1𝐶2) hyperstatique
de degré 1. Avantage : cela confère au système une rigidité plus importante qu'une solution isostatique et
cela permet une réalisation identique pour chaque liaison élémentaire. Inconvénient : il faut gérer la
contrainte géométrique de positionnement axial. La rigidité du montage permet d'être moins sensible aux
perturbations extérieures et donc de conserver une précision d'orientation souhaitée malgré ces
perturbations.
QB.4. Valeur de réglage de la précharge des guidage :
Les effets aérodynamiques les plus défavorables induisent un couple perturbateur de 0,18Nm soit 180Nmm.
Le réglage pertinent semble être d'après l'abaque fourni, une précharge axiale pour un élément de guidage
de 900N permettant un moment sur l'axe de 90 Nmm soit 180Nmm pour les deux.
QB.5. Justifications de la forme des opérateurs d’inertie
Le disque et le cylindre sont des solides de révolution d’où la forme diagonale de la matrice dans la base
comprenant l’axe de révolution et en un point de cet axe. De plus on a une relation entre les moments
d’inertie.
Pour le cylindre d’axe (P,ye) : y ²2
cyl
cyl cyl
BA C dm
QB.6. Opérateur d'inertie du système :
Pour pouvoir déterminer l'opérateur d'inertie de l'étage fin élévation au point P, il suffit d'additionner les
matrices exprimées toutes deux au point P et dans la même base. Pour cela on applique la relation d'Huygens
à l'opérateur de la partie optique entre son centre de gravité 𝑃0et le point 𝑃avec le vecteur 𝑃𝑃0 = 𝑑𝑥𝑒 .
On obtient dans la base (𝑥𝑒 , 𝑦𝑒 , 𝑧𝑒 ):
PT DS N°2 : Correction SII
4
𝐼(𝑃, 𝑓𝑒) = 𝐼(𝑃, 𝑐𝑦𝑙) + 𝐼(𝑃0, 𝑜) + 𝑚𝑜 (0 0 00 𝑑2 00 0 𝑑2
)
= (
𝐴𝑐𝑦𝑙 + 𝐴𝑜 0 0
0 𝐵𝑐𝑦𝑙 + 𝐵𝑜 + 𝑚𝑜𝑑2 0
0 0 𝐴𝑐𝑦𝑙 + 𝐵𝑜 + 𝑚𝑜𝑑2
)
QB.7. Position du centre de gravité :
La position du centre d'inertie noté 𝐺𝑓𝑒est donné par la relation : 𝑃𝐺𝑓𝑒 =
𝑚𝑜𝑑
𝑚𝑜+𝑚𝑐𝑦𝑙𝑥𝑒 (calcul du barycentre).
QB.8. Vecteur vitesse du centre d'inertie de l'ensemble fin élévation par rapport à 𝑹𝟎
D’après les hypothèses de l’énoncé : / ( ).fe Ro ea at y
Le champ des vecteurs vitesses du mouvement de l'ensemble fin élévation donne la relation :
𝑉𝐺𝑓𝑒,𝑓𝑒 𝑅0⁄ = 𝑉𝑃,𝑓𝑒 𝑅0⁄
+ 𝛺𝑓𝑒 𝑅0⁄ ∧ 𝑃𝐺𝑓𝑒
.
Une relation de composition de mouvement conduit à :
𝑉𝑝,𝑓𝑒 𝑅0⁄ = 𝑉𝑃,𝑓𝑒 𝑔𝑒⁄
+ 𝑉𝑃,𝑔𝑒/1 + 𝑉𝑃,1 0⁄
+ 𝑉𝑃,0 𝑅𝑜⁄ = 𝑣(𝑡)𝑍0
Le point P ayant la particularité d’appartenir aux axes des 3 rotations considérées.
Ainsi : 𝑉𝐺𝑓𝑒,𝑓𝑒 𝑅0⁄ = 𝑣(𝑡)𝑍0
+ 𝜃𝑒𝑎 (𝑡)𝑦𝑎 ∧
𝑚𝑜𝑑
𝑚𝑜+𝑚𝑐𝑦𝑙𝑥𝑒 = 𝑣(𝑡)𝑍0
− 𝜃𝑒𝑎 (𝑡)
𝑚𝑜𝑑
𝑚𝑜+𝑚𝑐𝑦𝑙𝑧𝑒
soit : 𝑉𝐺𝑓𝑒,𝑓𝑒 𝑅0⁄ = −𝜃𝑒𝑜
(𝑡)𝑚𝑜𝑑
𝑚𝑜+𝑚𝑐𝑦𝑙𝑍𝑒 + 𝑣(𝑡)𝑍0
.
QB.9. équation différentielle du mouvement de l'étage fin élévation par rapport à 𝑹𝟎 :
Pour établir l'équation différentielle du mouvement de l'étage fin élévation, on applique le principe
fondamental de la dynamique à l'étage isolé dans son mouvement par rapport au repère 𝑅0considéré comme
Galiléen.
Bilan des actions extérieures :
• le couple moteur :{𝑇𝑚𝑜𝑡→𝑓𝑒} = {𝑅𝑚𝑜𝑡→𝑓𝑒 = 0
𝑀𝑃 = 𝐶𝑚𝑦𝑒
}
𝑃
• la gravité : {𝑇𝑝𝑒𝑠𝑎𝑛𝑡𝑒𝑢𝑟→𝑓𝑒} = {𝑅𝑝𝑒𝑠𝑎𝑛𝑡𝑒𝑢𝑟→𝑓𝑒 = −𝑚𝑓𝑒𝑔𝑧𝑎
𝑀𝑃 = 𝑀𝐺𝑓𝑒
− 𝑚𝑓𝑒𝑔𝑧𝑎 ∧ 𝐺𝑓𝑒𝑃 = 𝑚𝑜𝑑𝑔cos(𝜃𝑒𝑜)𝑦𝑒 }
𝑃
• l'action de liaison entre l'étage gros d'élévation et fin d'élévation :
{𝑇ge→𝑓𝑒} = {𝑅ge→𝑓𝑒 = 𝑋𝑥𝑒 + 𝑌𝑦𝑒 + 𝑍𝑧𝑒
𝑀𝑃,ge→𝑓𝑒 = 𝐿𝑥𝑒 + 𝑁𝑧𝑒
}
𝑃
L'équation du moment dynamique au point P, en projection sur 𝑦𝑒 permet d’obtenir l’équation de
mouvement sans faire apparaitre d’inconnues de liaisons :
𝛿𝑃,𝑓𝑒 𝑅0⁄ . 𝑦𝑒 = 𝑀𝑃,𝑚𝑜𝑡→𝑓𝑒
. 𝑦𝑒 + 𝑀𝑃,𝑝𝑒𝑠𝑎𝑛𝑡𝑒𝑢𝑟→𝑓𝑒 . 𝑦𝑒 + 𝑀𝑃,ge→𝑓𝑒
. 𝑦𝑒 .
Il faut donc déterminer l'expression du moment dynamique au point P.
PT DS N°2 : Correction SII
5
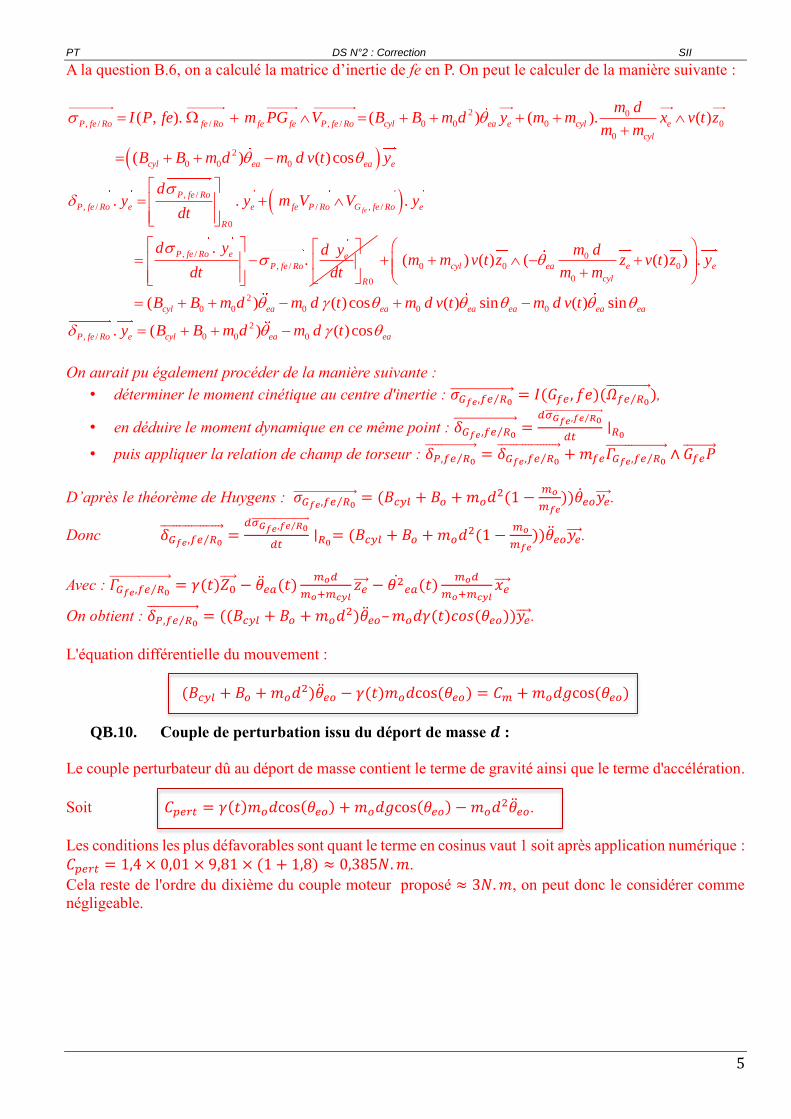
A la question B.6, on a calculé la matrice d’inertie de fe en P. On peut le calculer de la manière suivante :
2 0, / / , / 0 0 0 0
0
( , ). ( ) ( ). ( )P fe Ro fe Ro fe fe P fe Ro cyl ea e cyl e
cyl
m dI P fe m PG V B B m d y m m x v t z
m m
2
0 0 0( ) ( )coscyl ea ea eB B m d m d v t y
, /
, / / , /
0
, /
, /
0
. . .
..
fe
P fe Ro
P fe Ro e e fe P Ro G fe Ro e
R
P fe Ro e eP fe Ro
R
dy y m V V y
dt
d y d y
dt dt
00 0 0
0
( ) ( ) ( ( ) ) .cyl ea e e
cyl
m dm m v t z z v t z y
m m
2
0 0 0 0 0( ) ( )cos ( ) sin ( ) sincyl ea ea ea ea ea eaB B m d m d t m d v t m d v t
2
, / 0 0 0. ( ) ( )cosP fe Ro e cyl ea eay B B m d m d t
On aurait pu également procéder de la manière suivante :
• déterminer le moment cinétique au centre d'inertie : 𝜎𝐺𝑓𝑒,𝑓𝑒 𝑅0⁄ = 𝐼(𝐺𝑓𝑒 , 𝑓𝑒)(𝛺𝑓𝑒 𝑅0⁄ ),
• en déduire le moment dynamique en ce même point : 𝛿𝐺𝑓𝑒,𝑓𝑒 𝑅0⁄ =
𝑑𝜎𝐺𝑓𝑒,𝑓𝑒 𝑅0⁄
𝑑𝑡∣𝑅0
• puis appliquer la relation de champ de torseur : 𝛿𝑃,𝑓𝑒 𝑅0⁄ = 𝛿𝐺𝑓𝑒,𝑓𝑒 𝑅0⁄
+ 𝑚𝑓𝑒𝛤𝐺𝑓𝑒,𝑓𝑒 𝑅0⁄ ∧ 𝐺𝑓𝑒𝑃
D’après le théorème de Huygens : 𝜎𝐺𝑓𝑒,𝑓𝑒 𝑅0⁄ = (𝐵𝑐𝑦𝑙 + 𝐵𝑜 + 𝑚𝑜𝑑2(1 −
𝑚𝑜
𝑚𝑓𝑒))��𝑒𝑜𝑦𝑒 .
Donc 𝛿𝐺𝑓𝑒,𝑓𝑒 𝑅0⁄ =
𝑑𝜎𝐺𝑓𝑒,𝑓𝑒 𝑅0⁄
𝑑𝑡∣𝑅0
= (𝐵𝑐𝑦𝑙 + 𝐵𝑜 + 𝑚𝑜𝑑2(1 −
𝑚𝑜
𝑚𝑓𝑒))��𝑒𝑜𝑦𝑒 .
Avec : 𝛤𝐺𝑓𝑒,𝑓𝑒 𝑅0⁄ = 𝛾(𝑡)𝑍0
− ��𝑒𝑎(𝑡)𝑚𝑜𝑑
𝑚𝑜+𝑚𝑐𝑦𝑙𝑧𝑒 − 𝜃2
𝑒𝑎(𝑡)𝑚𝑜𝑑
𝑚𝑜+𝑚𝑐𝑦𝑙𝑥𝑒
On obtient : 𝛿𝑃,𝑓𝑒 𝑅0⁄ = ((𝐵𝑐𝑦𝑙 + 𝐵𝑜 + 𝑚𝑜𝑑
2)��𝑒𝑜–𝑚𝑜𝑑𝛾(𝑡)𝑐𝑜𝑠(𝜃𝑒𝑜))𝑦𝑒 .
L'équation différentielle du mouvement :
(𝐵𝑐𝑦𝑙 + 𝐵𝑜 + 𝑚𝑜𝑑2)��𝑒𝑜 − 𝛾(𝑡)𝑚𝑜𝑑cos(𝜃𝑒𝑜) = 𝐶𝑚 + 𝑚𝑜𝑑𝑔cos(𝜃𝑒𝑜)
QB.10. Couple de perturbation issu du déport de masse 𝒅 :
Le couple perturbateur dû au déport de masse contient le terme de gravité ainsi que le terme d'accélération.
Soit 𝐶𝑝𝑒𝑟𝑡 = 𝛾(𝑡)𝑚𝑜𝑑cos(𝜃𝑒𝑜) + 𝑚𝑜𝑑𝑔cos(𝜃𝑒𝑜) − 𝑚𝑜𝑑2��𝑒𝑜.
Les conditions les plus défavorables sont quant le terme en cosinus vaut 1 soit après application numérique :
𝐶𝑝𝑒𝑟𝑡 = 1,4 × 0,01 × 9,81 × (1 + 1,8) ≈ 0,385𝑁.𝑚.
Cela reste de l'ordre du dixième du couple moteur proposé ≈ 3𝑁.𝑚, on peut donc le considérer comme
négligeable.
PT DS N°2 : Correction SII
6
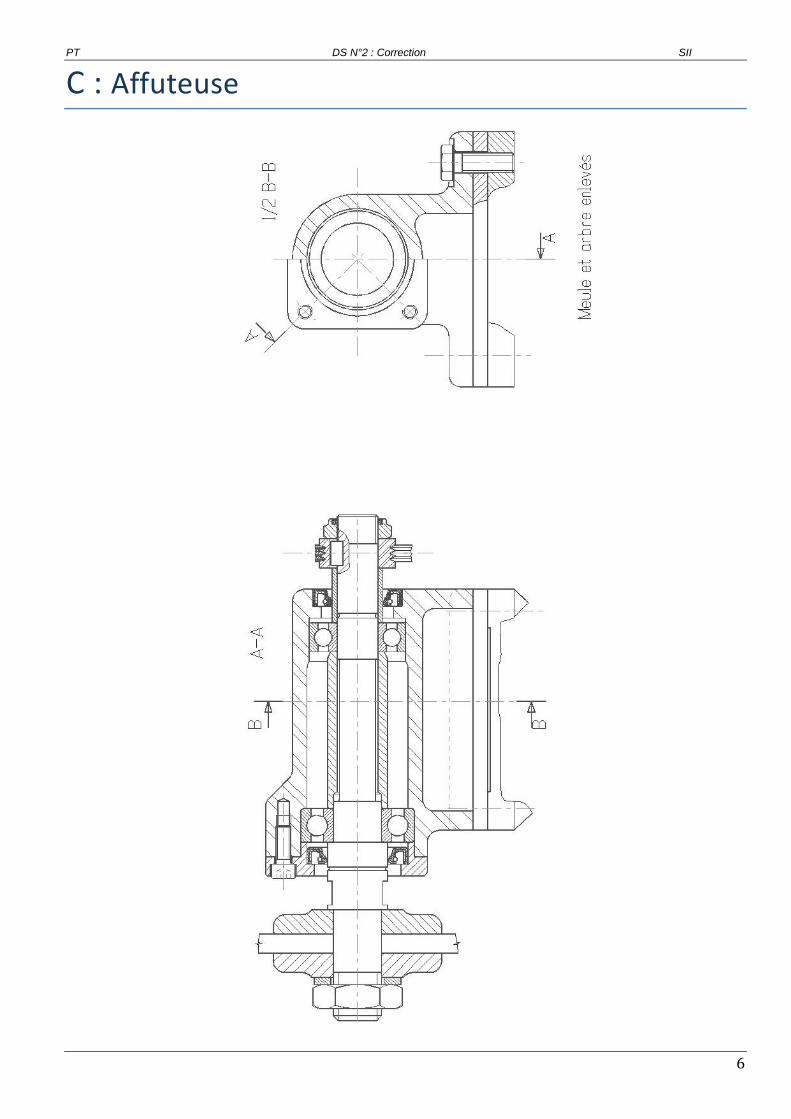
C : Affuteuse