Embed Size (px)
Citation preview

Unite d’Enseignement LA 101
Qu’est-ce que la Mecanique ?
Renee Gatignol
Universite Pierre et Marie Curie 2010


Table des matieres
1 Introduction 11.1 Qu’est-ce que la « mecanique » ? . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.1.1 La Mecanique ? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.1.2 La Mecanique au travers de grands champs disciplinaires . . . . . . . . . 11.1.3 Plan du Cours . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.2 L’esprit du cours . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2 Mecanique des structures 72.1 Objet de la resistance des materiaux . . . . . . . . . . . . . . . . . . . . . . . . . 72.2 Loi fondamentale de la statique . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.2.1 Notion de forces . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102.2.2 Principe fondamental de la statique . . . . . . . . . . . . . . . . . . . . . 142.2.3 Theoreme de l’action et de la reaction . . . . . . . . . . . . . . . . . . . . 142.2.4 Quelques exemples . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2.3 Liaisons parfaites dans l’espace . . . . . . . . . . . . . . . . . . . . . . . . . . . . 172.4 Liaisons parfaites dans le plan . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
2.4.1 Probleme plan . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 232.4.2 Liaisons parfaites dans le plan . . . . . . . . . . . . . . . . . . . . . . . . 242.4.3 Appui fixe, appui mobile . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
2.5 Relations contraintes - deformations . . . . . . . . . . . . . . . . . . . . . . . . . 262.5.1 Phenomene de traction - compression . . . . . . . . . . . . . . . . . . . . 272.5.2 Elasticite, plasticite, elasticite, rupture . . . . . . . . . . . . . . . . . . . . 31
2.6 Dilatation thermique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 342.7 Mecanique des structures : Exercices avec correction . . . . . . . . . . . . . . . . 36
2.7.1 Exercice 1 : Seau suspendu a un cable . . . . . . . . . . . . . . . . . . . . 362.7.2 Exercice 2 : Seau et systeme de mouflage . . . . . . . . . . . . . . . . . . 372.7.3 Exercice 3 : Portique plan constitue de deux barres soudees . . . . . . . . 382.7.4 Exercice 4 : Portique plan constitue de deux barres articulees . . . . . . . 402.7.5 Exercice 5 : Loi de l’elasticite lineaire de Hooke appliquee a un poteau en
compression . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 432.7.6 Exercice 6 : Trombone en traction . . . . . . . . . . . . . . . . . . . . . . 432.7.7 Exercice 7 : Poteau en compression de section droite non constante . . . . 442.7.8 Exercice 8 : Trave de pont . . . . . . . . . . . . . . . . . . . . . . . . . . . 452.7.9 Exercice 9 : Balustrade en acier . . . . . . . . . . . . . . . . . . . . . . . . 46
3 Mecanique du vol 473.1 Generalites sur les profils d’ailes . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
3.1.1 Qu’est ce qu’un profil d’aile ? . . . . . . . . . . . . . . . . . . . . . . . . . 483.1.2 Vitesse propre de l’avion. Vitesse de l’avion par rapport au sol. Incidence 493.1.3 Ecoulement autour d’un profil et distribution des pressions . . . . . . . . 50
i

ii TABLE DES MATIERES
3.1.4 Effets de viscosite et couche limite . . . . . . . . . . . . . . . . . . . . . . 533.1.5 Le decollement de la couche limite et le decrochage de l’aile . . . . . . . . 54
3.2 Analyse quantitative : portance et traınee . . . . . . . . . . . . . . . . . . . . . . 553.2.1 Definitions et premieres remarques . . . . . . . . . . . . . . . . . . . . . . 553.2.2 Coefficient de portance et coefficient de traınee . . . . . . . . . . . . . . . 573.2.3 Polaire du profil . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
3.3 Avion complet . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 593.3.1 Coefficient de traınee et coefficient de portance pour l’avion complet . . . 593.3.2 Polaire de l’avion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 603.3.3 Avion en vol sur une trajectoire rectiligne . . . . . . . . . . . . . . . . . . 61
3.4 Facteur de charge . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 623.5 Les effets tridimensionnels . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 653.6 Le decrochage, l’hypersustentation . . . . . . . . . . . . . . . . . . . . . . . . . . 65
3.6.1 Le decrochage . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 653.6.2 L’hypersustentation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
3.7 Mecanique du vol : Exercices avec correction . . . . . . . . . . . . . . . . . . . . 683.7.1 Exercice 1 : Vol de croisiere (en palier stabilise) . . . . . . . . . . . . . . . 683.7.2 Exercice 2 : Puissance necessaire pour le vol de l’avion . . . . . . . . . . . 693.7.3 Exercice 3 : Puissance necessaire pour le vol de l’avion et puissance utile . 713.7.4 Exercice 4 : Avion en montee ou en descente . . . . . . . . . . . . . . . . 73
4 Energetique 754.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 754.2 Premier principe de la thermodynamique . . . . . . . . . . . . . . . . . . . . . . 78
4.2.1 Observation : action mecanique resultant d’un echauffement . . . . . . . . 784.2.2 Systeme ferme, systeme ouvert . . . . . . . . . . . . . . . . . . . . . . . . 794.2.3 Qu’est-ce que l’energie ? . . . . . . . . . . . . . . . . . . . . . . . . . . . . 794.2.4 Chaleur, puissance calorifique . . . . . . . . . . . . . . . . . . . . . . . . . 804.2.5 Premier principe de la thermodynamique . . . . . . . . . . . . . . . . . . 81
4.3 Dimensions - Unites - Exemples de conversion de l’energie . . . . . . . . . . . . . 844.3.1 Dimensions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 844.3.2 Unites . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 844.3.3 Exemples d’ordre de grandeur pour l’energie . . . . . . . . . . . . . . . . 854.3.4 Conversion d’energie - Exemples . . . . . . . . . . . . . . . . . . . . . . . 86
4.4 Transformations thermodynamiques de base . . . . . . . . . . . . . . . . . . . . . 874.4.1 Observation. Variables d’etat. Lois d’etat . . . . . . . . . . . . . . . . . . 874.4.2 Relations entre travail, chaleur, energie et variables d’etat pour un gaz
parfait . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 904.4.3 Transformations thermodynamiques de base, dans le cas d’un gaz parfait
avec cp et cv constants . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 924.5 Transformations dans un turbo-propulseur . . . . . . . . . . . . . . . . . . . . . . 97
4.5.1 Transformations dans un turbo-propulseur . . . . . . . . . . . . . . . . . . 974.5.2 Calcul des energies mises en jeu dans chaque transformation . . . . . . . . 994.5.3 Calcul du travail que doit fournir le compresseur . . . . . . . . . . . . . . 1004.5.4 Puissance mecanique recuperee sur l’arbre . . . . . . . . . . . . . . . . . . 101
4.6 Rendement d’un turbo-propulseur - Cycles reels . . . . . . . . . . . . . . . . . . . 1024.6.1 Calcul du rendement thermodynamique du turbo-propulseur . . . . . . . 1024.6.2 Cycles reels . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1034.6.3 Ordres de grandeur pour des turbo-propulseurs industriels . . . . . . . . . 103
4.7 Exercices avec correction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 105

TABLE DES MATIERES iii
4.7.1 Exercice 1 : Transfert et conversion d’energie . . . . . . . . . . . . . . . . 1054.7.2 Exercice 2 : Loi d’etat . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1074.7.3 Exercice 3 : Transformations thermodynamiques . . . . . . . . . . . . . . 108
5 Acoustique 1115.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111
5.1.1 Historique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1115.1.2 Notion d’onde mecanique . . . . . . . . . . . . . . . . . . . . . . . . . . . 1125.1.3 Grandeurs caracteristiques d’une onde . . . . . . . . . . . . . . . . . . . . 1135.1.4 Transmission acoustique . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1155.1.5 Mouvements acoustiques - Domaine audible . . . . . . . . . . . . . . . . . 1165.1.6 Ordres de grandeur de la pression acoustique . . . . . . . . . . . . . . . . 116
5.2 Equations des ondes dans une corde . . . . . . . . . . . . . . . . . . . . . . . . . 1175.2.1 Fonctions de deux variables et derivees partielles . . . . . . . . . . . . . . 1175.2.2 Equation des ondes transversales dans une corde . . . . . . . . . . . . . . 1185.2.3 Ondes dans une corde, modes propagatifs . . . . . . . . . . . . . . . . . . 1215.2.4 Onde progressive sinusoıdale . . . . . . . . . . . . . . . . . . . . . . . . . 1225.2.5 Application : propagation d’une onde sismique a la surface de la terre . . 1235.2.6 Conditions aux limites . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1245.2.7 Ondes stationnaires . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1255.2.8 Application aux cordes de piano . . . . . . . . . . . . . . . . . . . . . . . 126
5.3 Equation des ondes dans un tube . . . . . . . . . . . . . . . . . . . . . . . . . . . 1285.3.1 Equation des ondes dans un tube . . . . . . . . . . . . . . . . . . . . . . . 1285.3.2 Conditions aux limites . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1305.3.3 Calcul des modes stationnaires dans un tube . . . . . . . . . . . . . . . . 131
5.4 Equation des ondes dans l’espace a trois dimensions . . . . . . . . . . . . . . . . 1325.4.1 Quelques definitions dans le domaine de l’acoustique . . . . . . . . . . . . 1325.4.2 Source ponctuelle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1335.4.3 Intensite acoustique, niveau sonore . . . . . . . . . . . . . . . . . . . . . . 1355.4.4 Notions sur la gene due au bruit . . . . . . . . . . . . . . . . . . . . . . . 135
5.5 Acoustique : Exercices avec correction . . . . . . . . . . . . . . . . . . . . . . . . 1385.5.1 Exercice 1 : Vibration transversale d’une corde fixee en ses deux extremites1385.5.2 Exercice 2 : Bruit d’un aeroport . . . . . . . . . . . . . . . . . . . . . . . 139
A Vecteurs et reperes de l’espace 141A.1 Vecteurs libres. Orientation de l’espace . . . . . . . . . . . . . . . . . . . . . . . . 141
A.1.1 Vecteurs lies, vecteurs libres . . . . . . . . . . . . . . . . . . . . . . . . . . 141A.1.2 Orientation de l’espace . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 144A.1.3 Plan oriente. Angles algebriques . . . . . . . . . . . . . . . . . . . . . . . 145
A.2 Operations sur les vecteurs libres . . . . . . . . . . . . . . . . . . . . . . . . . . . 146A.2.1 Operations des espaces vectoriels . . . . . . . . . . . . . . . . . . . . . . . 146A.2.2 Produit scalaire de deux vecteurs . . . . . . . . . . . . . . . . . . . . . . . 148A.2.3 Produit vectoriel de deux vecteurs libres . . . . . . . . . . . . . . . . . . . 149
A.3 Bases et composantes d’un vecteur . . . . . . . . . . . . . . . . . . . . . . . . . . 150A.3.1 Base orthonormee . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 150A.3.2 Composantes d’un vecteur sur une base orthonormee . . . . . . . . . . . . 151A.3.3 Expression des operations en fonction des composantes . . . . . . . . . . . 152
A.4 Reperes dans l’espace physique . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153A.4.1 Repere cartesien. Coordonnees cartesiennes . . . . . . . . . . . . . . . . . 154A.4.2 Coordonnees cartesiennes et coordonnees polaires dans le plan . . . . . . 154

iv TABLE DES MATIERES
A.4.3 Coordonnees cylindriques . . . . . . . . . . . . . . . . . . . . . . . . . . . 155A.5 En resume . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 157

Chapitre 1
Introduction
1.1 Qu’est-ce que la « mecanique » ?
1.1.1 La Mecanique ?
« La Mecanique ? Vous connaissez bien sur cette inconnue familiere. Elle est tellementpresente dans chacun de nos mouvements et dans notre environnement que nous finirions parl’oublier si, dissimulee et imprevisible, elle ne se revelait souvent comme la cause de nos echecs.Cette science est parmi les plus anciennes qui soient. Parfois eclipsee par les progres rapidesde sciences plus recentes, elle ressurgit brillamment a l’occasion de nos grandes realisations :construction de la Tour Eiffel en 1888, avenement des vols supersoniques a la fin du XXe siecle(avion Concorde), conception d’appareils modernes (avion Airbus A 380), vols spatiaux actuels(station orbitale Colombus, Station Spatiale Internationale (ISS)), robots intelligents, . . . ».
Extrait de « Le courrier du CNRS », N◦ 71, 1988.
La Mecanique comme « industrie » joue un role central. Citons les industries mecaniques ausens traditionnel du terme, completees par la conception et fabrication assistee par ordinateur(CFAO), les ateliers flexibles et l’intelligence artificielle. Citons aussi les industries des trans-ports (sur route, sur voie ferree, sur l’eau, dans l’air), les industries aerospatiales, les industriesnucleaires, les industries d’extraction (genie petrolier, genie minier), les industries du genie civil,. . . Associee a d’autres disciplines, la Mecanique est presente dans de tres nombreux domaines :meteorologie, oceanographie, biomecanique, genie biomedical, acoustique, robotique, . . .
1.1.2 La Mecanique au travers de grands champs disciplinaires
Le contenu de ce paragraphe est extrait de la revue « Le courrier du CNRS », N◦ 71, 1988L’image que l’on se fait de la Mecanique se limite souvent a celle des mecanismes ou as-
semblages de points et corps rigides. Mais la Mecanique, telle que l’affrontent actuellement leschercheurs et les ingenieurs, fait apparaıtre des grands champs disciplinaires. Nous allons donnerun apercu des principaux grands champs.
La mecanique des fluides
L’amelioration des performances aerodynamiques d’un avion ou d’une voiture necessite uneexcellente connaissance de l’ecoulement de l’air autour du vehicule. C’est le role de la mecaniquedes fluides de comprendre et de maıtriser cet ecoulement. On doit aussi etudier le comportementdes gaz dans les reacteurs ou les moteurs, leur compression, leur combustion et leur ejection,facteurs essentiels d’un bon rendement. Mais meme dans un avion, la mecanique des fluides ne
1

2 CHAPITRE 1. INTRODUCTION
se preoccupe pas que de gaz : les ecoulements de liquide dans les tuyauteries ne sont pas unprobleme mineur.
La mecanique des structures
Les diverses structures du genie civil, barrages, plates-formes en mer, murs de soutenement,gros oeuvre de batiment, ont pour objet principal de supporter des charges sans rupture nideformation excessive. Les differentes parties d’un avion sont soumises a des efforts, et doncsubissent des deformations dont les limites acceptables doivent etre parfaitement determinees.Les problemes d’interaction entre un fluide et une structure constituent une preoccupation pourles ingenieurs et les chercheurs, par exemple le comportement au vent d’ouvrages souples telsque les ponts a haubans.
La mecanique des materiaux
Qu’il s’agisse d’elements de structures, du train d’atterrissage ou des pieces de moteur d’unavion, la resistance mecanique depend du choix des materiaux employes dont on doit tres bienconnaıtre le comportement sous diverses sollicitations (vibrations, temperature, . . . ). Ceci estparticulierement vrai pour les materiaux nouveaux (composites, superalliages, . . . ). Ces sol-licitations peuvent provoquer des endommagements par « fatigue » du materiau ou bien ledeveloppement de fissures. Dans le cas des installations nucleaires, des moyens considerablessont consacres pour ameliorer l’ensemble de nos connaissances et etablir des regles valables pourles decennies a venir.
L’acoustique
Science du son, l’acoustique en etudie la production, la transmission, la detection et les effetssur l’environnement. Notons que la notion de son n’est pas seulement attachee a la sensationauditive, mais aussi a tous les autres phenomenes gouvernes par des principes physiques ana-logues. C’est ainsi que les infrasons et les ultrasons, la propagation acoustique dans les milieuxdenses liquides ou solides, et les vibrations relevent de la notion generale d’acoustique. Citonsquelques domaines de predilection de l’acoustique : le controle non destructif, l’acoustique sous-marine, l’acoustique medicale (echographie), l’acoustique musicale (analyse et synthese des sons,fonctionnement des instruments de musique), l’acoustique architecturale, l’acoustique de l’envi-ronnement (lutte contre le bruit), etc.
Les mecanismes et la tribologie
L’equipement mecanique d’un avion (train d’atterrissage, systemes de fermeture des portes,actionneurs des volets d’essuie-glaces, . . . ), comme de toute machine complexe (machine agricole,robot, . . . ), est un monde de « mecanismes ». On peut definir les « mecanismes » comme des outilsinventes par l’homme pour accroıtre sa force ou effectuer des taches qu’il ne pourrait realiserpar lui-meme. Ce sont des assemblages de corps indeformables ou deformables relies entre euxpar des liaisons. La tribologie regroupe tout ce qui touche a la lubrification, au frottement eta l’usure. Elle a pour but de faire fonctionner les mecanismes et elle cherche a diminuer lefrottement et l’usure qui sont des sources principales de gaspillage de l’energie.
L’energetique
Le probleme de l’energie est a l’heure actuelle, un probleme vital que les chercheurs et lesingenieurs ont a resoudre. Notons que les activites liees a l’energie font appel a de nombreuxsecteurs de la mecanique. Il y a l’etude des sources d’energie et de leur exploitation (sources

1.2. L’ESPRIT DU COURS 3
solaire, eolienne, geothermique, nucleaire, . . . ). Un second domaine concerne la transformationde l’energie d’un type donne en un autre type, et plus particulierement d’une energie degradee(chaleur) en une energie noble (mecanique, electrique). Enfin, le transport et le stockage del’energie, en particulier le stockage thermique, constituent un autre domaine d’etude. Commeexemples de stockage mecanique, on peut citer le volant a inertie, la mise sous pression d’ungaz, l’utilisation de la gravite (barrage hydraulique), . . .
1.1.3 Plan du Cours
Ce document intitule « Qu’est-ce que la Mecanique ? » a pour objectif de presenter differentesfacettes de la Mecanique, dans ses techniques comme dans ses secteurs d’applications. Le po-lycopie comprend quatre themes qui illustrent chacun un aspect de la Mecanique. Une Annexeintitule « Vecteurs et reperes de l’espace » complete le document. Les quatre themes sont :
– Mecanique des structures (Chapitre 2)– Mecanique du vol (Chapitre 3)– Energetique (Chapitre 4)– Acoustique (Chapitre 5)– Annexe
Le document est organise suivant les quatre themes indiques, avec pour chacun d’eux, unepartie de cours et des exercices corriges.
Une Annexe intitulee « Vecteurs et reperes de l’espace » complete le document.
1.2 L’esprit du cours
Le contenu de ce paragraphe est extrait du polycopie « Mecanique », Ph. Gatignol et C. Potel,Universite de Technologie de Compiegne, 1997.
La Mecanique classique
La Mecanique, dans le cadre de ce cours, peut etre definie comme la science del’equilibre et du mouvement. Certes, le terme Mecanique intervient dans diversesbranches de la Physique : mecanique quantique, mecanique statistique, mecaniquerelativiste. Il s’agit alors de domaines concernes par des situations extremes : l’infi-niment petit et la structure intime de la matiere, ou les grandes echelles d’espace etde temps. Nous nous interessons pour notre part aux phenomenes qui se produisenta l’echelle humaine. On parle alors de mecanique classique. Son champ d’applica-tion est cependant encore tres vaste puisqu’il s’adresse aussi bien au mouvement despetites particules qu’a celui des astres du systeme solaire, en passant par l’etude desobjets terrestres, qu’ils soient naturels (le corps humain par exemple) ou fabriquespar l’homme (tels que les machines).
Observation et modelisation
La Mecanique, comme la plupart des sciences physiques, repose actuellement surdeux demarches complementaires : l’observation et la modelisation.
Observation - Experimentation
L’observation est de loin la demarche la plus ancienne. Sans doute remonte-t-elle auxpremiers pas de l’Homme sur la Terre. Par necessite vitale, l’homme doit maıtriser,

4 CHAPITRE 1. INTRODUCTION
c’est-a-dire comprendre et prevoir, les effets de l’attraction terrestre pour controlerson equilibre ou pour preciser la trajectoire d’un projectile. On peut donc penserque l’observation de ces phenomenes elementaires a fait partie de tout temps duquotidien de l’homme.Lorsque l’observation devient organisee, reflechie, repetee, avec la recherche de liensentre causes et effets, on passe au stade plus evolue de l’experimentation. Celle-ci implique en general des actions de comparaison entre diverses causes ou diverseffets. On penetre alors dans le domaine de la mesure, donc de l’instrumentation,conduisant a la quantification des observations : on obtient ainsi des resultats demesures.Tres vite alors, l’introduction d’outils mathematiques s’impose : l’usage des nombres,entiers puis fractionnaires, pour chiffrer la mesure ; des elements de geometrie et dereperage dans l’espace (theorie des vecteurs) pour decrire les formes ou les mou-vements simples ; les nombres irrationnels (lies a la forme du carre), transcendants(inherents au cercle) ; les operations elementaires sur ces nombres sitot que l’on doitajouter ou multiplier des grandeurs ; l’algebre enfin, qui regle ces operations. Cesoutils, une fois construits, permettent en retour de decrire la realite observee pourvuque l’on accepte de la simplifier quelque peu. Ainsi, la chute d’un corps peut etreconsideree comme rectiligne si l’on neglige la rotation de la Terre et les effets vis-queux de l’air. Avec les memes simplifications, la duree de la chute apparaıt commeproportionnelle a la racine carree de la hauteur parcourue. Des lois commencent alorsa se degager et les liens peu a peu etablis entre causes et effets ouvrent la voie a unedemarche predictive.
Modelisation - Simulation
Apparaissent ainsi tres naturellement les premices de la modelisation. La modelisa-tion peut etre definie comme la demarche qui consiste a construire des schemas plusou moins simplifies du reel, a distinguer voire a separer les differents phenomenesphysiques mis en jeu, a en degager les lois essentielles, a traduire ces lois sous uneforme mathematique permettant le calcul et a batir ainsi des modeles physico-mathematiques suffisamment simples pour que leur etude permette d’enrichir lacomprehension et ensuite, connaissant les causes, d’en predire les effets. Cette demar-che peut en somme se resumer par les deux termes schematisation et rationalisation(au sens de l’etude par le raisonnement et le calcul).On concoit, par l’esquisse qui vient d’etre donnee, que l’idee du modele etait cer-tainement presente dans l’esprit des savants depuis les premieres observations syste-matiques des phenomenes naturels. Mais la modelisation n’a vraiment pris son pleinessor qu’avec les progres des mathematiques, notamment avec les theories du calculinfinitesimal introduites par Newton et par Leibniz au 17e siecle et avec elles lespremieres resolutions d’equations differentielles, puis au 18e siecle grace a la theoriemoderne des fonctions et a l’apparition des equations aux derivees partielles (Euler,Cauchy, d’Alembert). Un nouveau pas a ete franchi a la fin du 19e siecle avec lamise au point des premieres methodes asymptotiques, c’est-a-dire approchees (parPoincare notamment) inspirees a l’origine par l’observation des phenomenes de per-turbations dans le mouvement des planetes. Enfin, au 20e siecle et jusqu’a nos jours,les progres gigantesques du calcul numerique et des outils informatiques ont donne ala modelisation une place de tout premier plan dans l’activite scientifique, au pointque le terme modelisation est a present parfois utilise dans le sens de modelisationnumerique.

1.2. L’ESPRIT DU COURS 5
Grace au developpement du calcul numerique, la modelisation devient un outil deprediction de plus en plus elabore. Si la demarche premiere de simplification desobjets, d’isolation des phenomenes pour mieux les comprendre, demeure une activitescientifique essentielle, ne serait-ce que sur le plan pedagogique, les performances ducalcul permettent aujourd’hui, dans un esprit un peu contraire, de prendre en compteune description des objets etudies la plus detaillee possible. On introduit ainsi deseffets physiques de plus en plus nombreux, et eventuellement couples, afin de « collerau mieux » a la realite et de pouvoir predire des comportements avec une grandeprecision. On parle alors de simulation. La simulation, necessairement numerique,intervient souvent comme une demarche de recherche industrielle. Elle s’introduitde plus en plus dans les activites de la conception. Grace a elle, les constructeurspeuvent a present faire l’economie de nombreux essais qui necessitaient l’elaborationlongue et couteuse de prototypes.
Observation et modelisation : une complementarite
Il serait errone d’en conclure que l’experimentation a ete releguee au rang des acces-soires, et probablement utopique de croire que cela puisse arriver un jour. La mise aupoint des grands codes de calculs predictifs, associes a une demarche de simulation deplus en plus complexe, ne peut se faire sans un retour vers l’observation directe desphenomenes, sur la base d’experiences precises permettant d’obtenir des resultats demesure les plus fiables possibles : c’est l’etape dite de « validation » de la methodenumerique. Les resultats experimentaux permettent de corriger ou meme d’enrichirles modeles de la simulation (en precisant par exemple des valeurs de constantesphysiques, ou des lois de comportement de materiaux) : c’est le « recalage » dumodele. A l’inverse, les resultats de calcul fournis par la simulation permettent derevoir l’experimentation soit au niveau de la mesure (ou placer les capteurs ?), soitmeme au niveau de sa definition (quelles donnees ou quelles geometries considerer ?).Ainsi, observation et experimentation d’une part, modelisation et simula-tion d’autre part, sont devenues aujourd’hui deux demarches scientifiques indisso-ciables et complementaires. La figure 1.1 presente un diagramme qui resume cettecomplementarite et ce couplage entre ces deux approches.
L’apprentissage de la modelisation
Face a un objet, naturel ou manufacture, existant ou a construire, l’ingenieur scien-tifique doit etre capable d’effectuer les operations qui vont lui permettre d’obtenirun « bon modele ». Schematisation et rationalisation, nous l’avons dit, resument lesdiverses etapes qui vont le conduire a ce resultat.C’est le but essentiel de ce cours que d’apprendre, sur des objets simples de lamecanique quotidienne, a franchir ces differentes etapes. C’est donc la schematisationde ces objets et l’ecriture des equations permettant d’en predire le mouvement oule comportement qui seront au centre de nos preoccupations. La resolution (analy-tique) des equations obtenues, lorsqu’elle sera possible, permettra ensuite d’accedera un certain nombre de resultats tels que des calculs d’efforts a l’equilibre ou desdescriptions, au moins qualitatives, de comportements. Il ne sera pas possible, dansle cadre de l’UE, d’effectuer des confrontations experimentales, mais on ne manquerapas a chaque fois de faire appel a son intuition et a son sens pratique pour analyserle bien fonde des resultats obtenus.

6 CHAPITRE 1. INTRODUCTION
Modélisation ou simulation
Observation ou expérimentation
OBJETexistant
ou àconstruire
MODELESOutils
mathématiquesLois physiques
EQUATIONSRésolution
analytique ounumérique
RESULTATSde
calculs
MAQUETTES
ESSAIS RESULTATSd’expériences
MESURESBancs expérimentaux
CONFRONTATIONRETOURComprendre
ou prévoir
Fig. 1.1 – Observation et modelisation : une complementarite
Mais la demarche essentielle demeurera l’elaboration de modeles physico-mathema-tiques corrects, sous des hypotheses physiques clairement formulees. En ce sens,l’apprentissage de la modelisation est une ecole de rigueur. On ne sauraitecrire d’equations justes sur la base d’un schema mal precise. On portera une at-tention toute particuliere a la representation geometrique des objets et au reperagede leurs positions dans l’espace. Egalement, on aura le souci constant de l’analysedimensionnelle des grandeurs physiques introduites et l’on veillera, de ce point devue, a l’homogeneite des equations ecrites.
Les etapes de la modelisation
La construction d’un modele en mecanique peut etre vue comme la succession d’uncertain nombre d’etapes a mesure que les grandeurs physiques elementaires sontintroduites.Le tout premier stade consiste a decrire la forme des objets, leurs dimensions, leuraptitude a se deformer, leurs positions relatives lorsque plusieurs constituants sontconsideres, . . . Les grandeurs physiques essentielles sont ici la longueur (L) et lanotion d’angle. Le concept de vecteur est fondamental. Il conviendra avant toutechose de preciser soigneusement dans l’espace physique les reperes qui permettrontde definir les grandeurs algebriques (coordonnees, abscisses et angles). De plus, onfait en general sur l’objet considere un certain nombre d’hypotheses simplificatrices :on supposera par exemple l’indeformabilite (solide rigide), on negligera certainesepaisseurs, schematisant une barre par un segment de droite ou une plaque par unelement de surface.

Chapitre 2
Mecanique des structures
2.1 Objet de la resistance des materiaux
Les divers ouvrages et machines, que l’on rencontre dans la vie courante, doivent possederen plus de beaucoup d’autres proprietes et qualites, celles de la « resistance ». On entendpar « resistance » la propriete de resister a la destruction sous l’action des forces exterieures.On notera qu’en « Resistance des Materiaux », (RDM), on utilise la terminologie charges ouchargements au lieu de forces exterieures. Avant d’aller plus en avant, on va donner quelquesexemples d’ouvrages ou de machines ou la connaissance de sa « resistance » est absolumentindispensable. Les premiers exemples presentes sont tres schematises, mais les derniers issus dumonde reel sont plus complexes.
1. Ouvrage de Bercy
126 m
77 m
Piliers de soutiende la toiture
Vue de dessus dela toiture
(a) (b)
eau
Vanne
Fig. 2.1 – a) Ouvrage de Bercy - b) Vanne de retenue d’eau
Les quatre piliers cylindriques sont identiques, en beton et de hauteur : H = 24 m (Fig.2.1a). Connaissant les caracteristiques mecaniques du beton, les calculs de RDM doiventpermettre de determiner, d’une part le rayon minimal des piliers pour soutenir la toiture,et d’autre part leur raccourcissement.
2. Vanne de retenue d’eauUne vanne schematisee par un secteur circulaire ferme une retenue d’eau (Fig. 2.1b).L’eau exerce sur la vanne des efforts de pression. Les calculs de RDM doivent permettrede calculer sa resistance.
3. Pont roulant
7

8 CHAPITRE 2. MECANIQUE DES STRUCTURES
Pont roulant
Pilier Pilier
Fig. 2.2 – Pont roulant
Un pont roulant repose sur deux piliers (on dit que le pont repose sur deux appuis) (Fig.2.2). Les calculs de RDM doivent permettre de determiner la charge maximum que peutsupporter le pont roulant.
4. Potence, toit de fermeDans le cas d’une potence (Fig. 2.3a), les calculs de RDM doivent permettre de determinerla charge maximum qu’elle peut supporter. Dans le cas d’un toit de ferme (Fig. 2.3b),connaissant les efforts dus au vent et le poids du toit, les calculs doivent permettre deprevoir le dimensionnement de la charpente.
Vent
(a) (b)
Fig. 2.3 – a) Potence - b) Toit de ferme
5. Exemples d’ouvrages reelsNous presentons maintenant quelques exemples d’ouvrages reels, donc plus complexes.– Un robot industriel utilise pour le deplacement de pieces a partir d’un poste de travail A
represente sur la figure 2.4 (dessin extrait du livre de P. Agati et N. Mattera, Mecanique1 : Modelisation, Cinematique, Statique, Dunod, 1994, page 215).
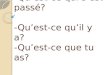
– Un pantographe du T.G.V. (Fig. 2.5) et sa schematisation (Fig. 2.6) pour le captagedu courant a grande vitesse. Il s’agit d’un mecanisme tres complexe. Le mouvement demontee et de descente du pantographe est assuree par des ressorts et un verin pneu-matique. (Photo et dessin extraits du livre de P. Agati et N. Mattera, Mecanique 1 :Modelisation, Cinematique, Statique, Dunod, 1994, pages 248 et 250).

2.1. OBJET DE LA RESISTANCE DES MATERIAUX 9
embase fixe
bâti mobile
pince
manchette
bras inférieur
articulation de « l’épaule »
contrepoids
bras supérieur
articulation du « poignet »articulation du « coude »
Fig. 2.4 – Robot industriel
Fig. 2.5 – Photo d’un pantographe
L’objet de la RDM (Resistance Des Materiaux) est de presenter des methodesde calcul pour determiner la resistance des elements de la construction.
On verra que l’on sera aussi amene a determiner les changements de forme et de dimension(deformations) des differents elements de la construction sous l’effet des charges. Notons que dansbeaucoup de cas concrets, les deformations en question sont tres petites ; elles ne peuvent etredetectees qu’avec des appareils speciaux appeles « extensiometres ». Ces deformations n’affectentalors pas l’etude de l’equilibre de la construction d’ou l’interet de la mecanique du corps solideindeformable.
Dans ce qui suit nous presentons l’equilibre statique d’un ou plusieurs corps avec :– l’enonce du principe fondamental de la statique,– l’etude des liaisons entre deux corps solides.
Nous presenterons ensuite quelques exemples de deformations avec :– le phenomene de traction - compression sous l’effet d’un chargement,– le phenomene de dilatation thermique.

10 CHAPITRE 2. MECANIQUE DES STRUCTURES
Fig. 2.6 – Schematisation d’un pantographe
2.2 Loi fondamentale de la statique
2.2.1 Notion de forces
On appelle action mecanique toute cause susceptible de maintenir le corps au repos (oude creer son mouvement). Les actions mecaniques peuvent etre a distance (pesanteur, champelectro-magnetique, . . . ) ou de contact (chargement ponctuel (c’est-a-dire en un point), liaisonssurfaciques, . . . ).
Le but de ce paragraphe est de choisir une representation mecanique pour les actions meca-niques.
a) Force exercee sur un point materiel
Les actions mecaniques s’exercant sur un point materiel peuvent etre schematisees (c’est-a-dire caracterisees) par un vecteur glissant (ou glisseur) : voir A.1.1.3. Ce vecteur glissant estparfaitement defini par un point de son support et un vecteur libre. Notons M le point materielet ~F le vecteur libre (Fig. 2.7a).
On dira : force ~F appliquee au point M .On dira aussi glisseur et on ecrira : {M, ~F}.On peut avoir sur un point materiel M plusieurs forces ~F1, ~F2, ~F3 (Fig. 2.7b).~F = ~F1 + ~F2 + ~F3 est la resultante des trois forces ~F1, ~F2, ~F3.
b) Moment en point A d’une force exercee sur un point materiel
On definit le moment en A de la force ~F appliquee au point M (c’est-a-dire le glisseur{M, ~F}) par la quantite :
−→MA ≡
−→MA({M, ~F}) =
−−→AM ∧ ~F
Remarque
Soit δ la droite support de {M, ~F} (Fig. 2.7c). Alors (voir A.2.3.2) :
A ∈ δ ⇐⇒−−→AM ∧ ~F = ~0 ⇐⇒
−→MA({M, ~F}) = ~0

2.2. LOI FONDAMENTALE DE LA STATIQUE 11
A
M M
~F ~F1
~F2~F3
(a) (b)
A
Mδ
~F
~F1
~F2
~F3
~F4
M1
M2
M3
M4
(c) (d)
Fig. 2.7 – Forces schematisees par des vecteurs glissants
c) Forces exercees sur un ensemble de points materiels
On considere un ensemble de points materiels M1, M2, . . . , Mn, sur lesquels s’exercentrespectivement les forces ~F1, ~F2, . . . , ~Fn (Fig. 2.7d). On appelle T l’ensemble des forces {Mi, ~Fi},i = 1, 2, . . . , n.
Definitions
On appelle resultante de T le vecteur :
−→R(T ) =
i=n∑i=1
~Fi
On appelle moment en A de T le vecteur :
−→MA(T ) =
i=n∑i=1
−−→AM i ∧ ~Fi
−→R(T ) est un vecteur libre.−→MA(T ) est defini en chaque point A de l’espace : on dit que l’on a un champ de vecteurs.
Soit B un second point. Cherchons la relation entre−→MA(T ) et
−→MB(T ) :
−→MB(T ) =
i=n∑i=1
−−→BM i ∧ ~Fi =
i=n∑i=1
(−−→BA +
−−→AM i
)∧ ~Fi =
−−→BA ∧
i=n∑i=1
~Fi +i=n∑i=1
−−→AM i ∧ ~Fi
soit :−→MB(T ) =
−−→BA ∧
−→R(T ) +
−→MA(T ) (2.1)
La formule (2.1) est dite formule de transport pour les vecteurs du champ de moment.

12 CHAPITRE 2. MECANIQUE DES STRUCTURES
Proprietes
– En general, il n’existe pas de point A tel que−→MA(T ) = ~0.
– Si A et B appartiennent a une meme droite parallele a−→R(T ), alors :
−→MA(T ) =
−→MB(T ).
En effet dans ce cas,−−→BA ∧
−→R(T ) = ~0 (voir A.2.3.2), et l’egalite
−→MA(T ) =
−→MB(T ) en
resulte.– Si
−→R(T ) = ~0, on voit sur la formule (1) que
−→MA(T ) =
−→MB(T ), ∀A et ∀B. On dit que T
est un couple.
d) Forces reparties en volume
Les forces exercees sur un systeme materiel occupant un volume V peuvent etre reparties dansle volume V avec une densite volumique ~r(M). Autour de chaque point M de V, on considereun petit volume ∆V et la force ∆~F exercee sur ce petit volume est ∆~F = ~r(M) ∆V appliqueeen M (Fig. 2.8a).
Soit T l’ensemble de ces forces.On appelle resultante de T le vecteur obtenu en ajoutant tous les petits vecteurs ∆~F =
~r(M) ∆V . Autrement dit :−→R(T ) est egale a la somme sur V des petits vecteurs ~r(M) ∆V . Nous
avons ici la notion d’integrale sur le volume V et nous ecrirons en remplacant ∆V par l’elementde volume infiniment petit dV :
−→R(T ) =
∫∫∫V
~r(M) dV
On appelle moment en A de T , le vecteur obtenu en sommant tous les moments en A despetits vecteurs ∆~F = ~r(M) ∆V . Autrement dit,
−→MA(T ) est egale a la somme sur V des petits
vecteurs−−→AM ∧ ~r(M) ∆V . Comme ci-dessus, nous avons ici la notion d’integrale sur le volume
V et nous ecrirons :−→MA(T ) =
∫∫∫V
−−→AM ∧ ~r(M) dV
Exemple : Champ de la pesanteur uniforme
On note ~g le vecteur acceleration de la pesanteur suppose constant. On introduit ρ(M) lamasse volumique en chaque point M de V, c’est-a-dire la masse de l’unite de volume en M . Lamasse totale de V est m(V), et le centre d’inertie de V est note G. Par definition on a :
m(V) =∫∫∫
Vρ(M) dV ;
∫∫∫V
ρ(M)−−→GM dV = ~0
Le vecteur ~r(M) precedent est ici egal a ρ(M)~g (Fig. 2.8b).
Ainsi−→R(T ) est egale a la somme sur V des petits vecteurs ρ(M)~g ∆V . Comme ~g est constant,
on peut ecrire :
−→R(T ) =
∫∫∫V
ρ(M)~g dV = ~g
∫∫∫V
ρ(M) dV = m(V)~g
De maniere similaire,−→MA(T ) est egal a la somme sur V des petits vecteurs
−−→AM ∧ (ρ(M)~g) ∆V .

2.2. LOI FONDAMENTALE DE LA STATIQUE 13
A
A
V V
∆~F∆V
M
G
~g(a) (b)
MM
∆~F = ~r(M) ∆S
∆S
S
∆~F = ~r(M) ∆`
∆`
`(c) (d)
Fig. 2.8 – Forces volumiques, surfaciques et lineiques
Sachant que−−→AM =
−→AG +
−−→GM , on a :
−→MA(T ) =
∫∫∫V(−−→AM) ∧ (ρ(M)~g) dV =
∫∫∫V(−→AG +
−−→GM) ∧ (ρ(M)~g) dV
=∫∫∫
V
−→AG ∧ (ρ(M)~g) dV +
∫∫∫V
−−→GM ∧ (ρ(M)~g) dV
=(∫∫∫
Vρ(M) dV
)−→AG ∧ ~g +
(∫∫∫V
−−→GM ρ(M) dV
)∧ ~g
= m(V)−→AG ∧ ~g =
−→AG ∧ (m(V)~g) =
−→AG ∧
−→R(T )
car l’integrale∫∫∫
V−−→GM ρ(M) dV = ~0 d’apres la definition du centre d’inertie G de gravite de V.
Resultat (tres important)
Les efforts de pesanteur sur le volume V, dans un champ de pesanteur uniforme, sont doncequivalents pour leur resultante et leur moment en un point A, a une force unique m(V)~gappliquee au centre d’inertie G de V. En d’autres termes, les efforts de pesanteur sur V sontequivalents au glisseur {G, m(V)~g}.
e) Forces reparties en surface, forces reparties en ligne
On a pour les forces reparties en surface et les forces reparties en ligne, les memes definitionset proprietes que pour les forces reparties en volume. Les petites forces s’exercent ici, soit sur despetites surfaces ∆S (Fig. 2.8c), soit sur des petits arcs ∆` (Fig. 2.8d). Les integrales de volumesont a remplacer par des integrales sur une surface ou sur une ligne.
Exemples
Les forces de contact entre un pneu et la chaussee correspondent a des forces repartiesen surface. Les efforts de pression d’un liquide sur une paroi correspondent aussi a des forcesreparties en surface. Un rideau suspendu a une tringle exerce sur celle-ci des efforts repartis enligne.

14 CHAPITRE 2. MECANIQUE DES STRUCTURES
2.2.2 Principe fondamental de la statique
Les objets dans l’espace physique sont reperes par rapport a un repere (voir Annexe). Si ons’interesse au mouvement de ces objets, il faut introduire le temps. On appelle « Referentiel »l’ensemble d’un repere et d’un temps. A chaque instant, un objet en mouvement, ou au repos,est repere par sa position par rapport au repere donne dans l’espace.
Enonce du principe fondamental de la statique
Il existe un referentiel R0 dit galileen (ou absolu) tel que tout systeme materiel Σ est enequilibre (c’est-a-dire au repos) dans R0 si et seulement si les efforts exterieurs T s’exercantsur Σ ont une resultante nulle et un moment en un point donne quelconque, nul, et ceci quelque soit l’instant considere.
Σ est en equilibre dans R0 ⇐⇒−→R(T ) = ~0 et
−→MA(T ) = ~0 (2.2)
Remarque
D’apres (1) :
−→MA(T ) = ~0 en un point A ⇐⇒
−→MB(T ) = ~0 en tout point B de l’espace
Remarque
Existence des reperes galileens : en toute rigueur, un repere galileen n’existe pas. L’enonce donneici (et de meme l’enonce analogue dans le cas du mouvement) l’est dans le cadre de la Mecaniquenewtonnienne (Mecanique de Newton). On sait, avec les theories de la relativite de Einstein,que la mecanique newtonnienne n’est qu’une approximation. Mais cette approximation est tresbonne et meme excellente pour de nombreux phenomenes et en particulier pour les problemesde RDM. Pour ces derniers on admet que le referentiel lie a la terre est galileen.
A noter les dates suivantes : Newton (1642–1727) et Einstein (1879–1955).
Remarque
Il faut bien noter que l’enonce du principe fondamental de la statique pourun systeme materiel Σ en equilibre ne fait intervenir que les forces exterieures ausysteme Σ.
2.2.3 Theoreme de l’action et de la reaction
Soient Σ1 et Σ2 deux systemes materiels sans partie materielle commune (Σ1⋂
Σ2 = ∅)(Fig. 2.9a). Les forces exterieures a Σ = Σ1 ∪ Σ2 ne sont pas en general la reunion des forcesexterieures a Σ1 et de celles exterieures a Σ2, comme ceci est explique ci-apres.
Notons Ext tout ce qui est exterieur a la fois a Σ1 et a Σ2. Soient T1 et T2 les effortsexterieurs respectivement a Σ1 et a Σ2 et exerces par Ext. La somme T1 + T2 represente lesefforts exterieurs a Σ = Σ1 ∪ Σ2 exerces par Ext (Fig. 2.9b). Soient enfin T1→2 les effortsexerces par Σ1 sur Σ2, et T2→1 les efforts exerces par Σ2 sur Σ1 (Fig. 2.9a). Notons que lesefforts T1→2 et T2→1 sont des efforts interieurs au systeme Σ1 ∪ Σ2.
D’apres les definitions donnees pour les resultantes et pour les moments en un point A, ona : −→
R(T1) +−→R(T2 =
−→R(T1) + T2) ,
−→MA(T1) +
−→MA(T2 =
−→MA(T1) + T2)

2.2. LOI FONDAMENTALE DE LA STATIQUE 15
Ext.
Ext.
Ext.
Ext.
T1
T1
T2
T2
Σ1
Σ1
Σ2
Σ2
A
A
T2→1
T1→2
Σ1 ∪ Σ2
(a)
(b)
Fig. 2.9 – Theoreme de l’action et de la reaction
Ecrivons la loi fondamentale de la statique successivement pour Σ1, Σ2 et Σ1 ∪ Σ2 :
−→R(T1) +
−→R(T2→1) = ~0 et
−→MA(T1) +
−→MA(T2→1) = ~0
−→R(T2) +
−→R(T1→2) = ~0 et
−→MA(T2) +
−→MA(T1→2) = ~0
−→R(T1 + T2) = ~0 et
−→MA(T1 + T2) = ~0
En faisant la combinaison (1, 1, -1) d’une part pour les resultantes et d’autre part pour lesmoments, il vient : −→
R(T2→1) +−→R(T1→2) = ~0
−→MA(T2→1) +
−→MA(T1→2) = ~0
La demonstration est valable quel que soit le point A.On a le theoreme suivant :
Theoreme de l’action et de la reaction
Les efforts T1→2 exerces par Σ1 sur Σ2 et les efforts T2→1 exerces par Σ2 sur Σ1 sont telsque : −→
R(T1→2) = −−→R(T2→1) (2.3)
−→MA(T1→2) = −
−→MA(T2→1) ∀A (2.4)
2.2.4 Quelques exemples
La demarche pour appliquer le principe fondamental de la statique est la suivante :1- Il faut definir le systeme Σ auquel on veut appliquer le principe fondamental. La definition
du systeme Σ est essentiel.2- Il faut faire tres soigneusement l’inventaire des forces exterieures exercees sur le systeme
Σ.3- Enfin il faut appliquer le principe fondamental de la statique a Σ. Ce n’est que dans cette
troisieme etape que l’on ecrit que la resultante des efforts exterieurs appliques a Σ est nul, etque le moment de ces memes efforts, en un point A que l’on choisit le mieux possible, est nul.

16 CHAPITRE 2. MECANIQUE DES STRUCTURES
Exemple 1 : Seau suspendu a un cable
Le seau represente sur la figure 2.10a est suspendu a un cable. La masse de l’anse est supposeenegligeable et est prise egale a 0. La masse du seau et de son contenant est M . Le centre d’inertiedu seau et de son contenant est le point G. On admet que les actions entre l’anse et le seau(liaisons en A et en B) ont pour resultante ~R(anse → seau) et pour moment en A le vecteur−→MA(anse→ seau).
De plus les efforts exerces par le cable sur l’anse sont schematises par un glisseur ~F (cable→anse) applique en C (voir Fig. 2.10a).Si on choisit pour systeme Σ, le seau muni de son anse, les efforts exterieurs a Σ sont alors :
– le glisseur ~F (cable→ anse) applique en C,– le glisseur M ~g applique en G representant le poids du seau et de son contenant.
Si on choisit pour systeme Σ, le seau et son contenant sans l’anse, les efforts exterieurs a Σ sontalors :
– les efforts exerces par l’anse sur le seau, dont la resultante est ~R(anse → seau) et dont lemoment en A est
−→MA(anse→ seau),
– le glisseur M ~g applique en G representant le poids du seau.
Si on choisit pour systeme Σ, l’anse seule, les efforts exterieurs a Σ sont :– le glisseur ~F (cable→ anse) applique en C,– les efforts exerces par le seau sur l’anse, dont la resultante est −~R(anse → seau) et dont
le moment en A est −−→MA(anse → seau). Les signes « − » viennent de l’application du
theoreme de l’action et de la reaction.
cable
sol
anse anse
seau seau
A AB B
~g
~gC
G
O
G1
G2
(a) (b)
Fig. 2.10 – Seau tenu et seau pose
Exemple 2 : Seau vide pose sur un sol horizontal
Le seau est represente sur la figure 2.10b. La masse de l’anse n’est plus supposee negligeableet vaut m ; le centre d’inertie de l’anse seule est le point G2. La masse du seau est M ; le centred’inertie du seau (sans l’anse) est le point G1. On admet que les actions entre l’anse et le seau(liaisons en A et en B) ont pour resultante ~R(anse → seau) et pour moment en A le vecteur−→MA(anse→ seau).
De plus les efforts exerces par le sol sur le seau sont schematises par un glisseur ~F (sol→ seau)appliquee en O, centre de la base du seau (Fig. 2.10b).Si on choisit pour systeme Σ, le seau muni de son anse, les efforts exterieurs a Σ sont alors :

2.3. LIAISONS PARFAITES DANS L’ESPACE 17
– le glisseur ~F (sol→ seau) applique en O,– le glisseur m~g applique en G2 representant le poids de l’anse,– le glisseur M ~g applique en G1 representant le poids du seau.
Si on choisit pour systeme Σ, l’anse seule, les efforts exterieurs a Σ sont alors :– le glisseur m~g applique en G2 representant le poids de l’anse,– les efforts exerces par le seau sur l’anse, dont la resultante est −~R(anse → seau) et dont
le moment en A est −−→MA(anse→ seau).
2.3 Liaisons parfaites dans l’espace
On va dans ce paragraphe s’interesser a la realisation et aux proprietes de quelques liaisonssimples entre deux corps solides indeformables.
On commence par donner quelques exemples de liaisons entre corps solides :– une roue de bicyclette (solide 1) tournant autour de son moyeu (solide 2),– une porte (solide 1) reposant sur des gongs lies au mur (solide 2),– un levier de vitesse mobile dans la boıte de vitesse,– un systeme bielle-manivelle,– un seau (solide 1) pose sur le sol (solide 2),
Definition
Une liaison est un dispositif mecanique qui a pour fonction d’apporter une restriction al’ensemble de tous les mouvements relatifs d’un solide par rapport a un autre.
Les liaisons que nous allons considerer sont realisees par contact entre deux surfaces rigide-ment liees aux deux solides en question. Les surfaces de contact sont indeformables et elles sontlisses avec un plan tangent variant continument. De plus les liaisons que nous allons considerersont supposees sans frottement. Nous donnons, ci-apres, pour cette notion une approche in-tuitive.
Notion de liaisons parfaites (ou liaisons sans frottement)
Soient deux solides en contact le long de la surface S (Fig. 2.11). On admet que les actionsmecaniques du premier solide Σ1 sur le second Σ2 prennent place le long de la surface S et quel’on a une densite surfacique de forces ~r1→2(M). En d’autres termes la force ~r1→2(M) ∆S est laforce exercee par Σ1 sur Σ2 sur la petite surface ∆S autour du point M (Fig. 2.11). L’ensembledes efforts exerces par Σ1 sur Σ2 a pour resultante et pour moment en A, les quantites suivantesdonnees par des integrales sur la surface S (on ajoute toutes les petites forces) :
−→R(1→ 2) =
∫∫S
~r1→2(M) dV
−→MA(1→ 2) =
∫∫S
−−→AM ∧ ~r1→2(M) dV
Naturellement les efforts exerces par Σ2 sur Σ1 sont, d’apres le theoreme de l’action et de lareaction, tels que :
−→R(2→ 1) = −
−→R(1→ 2) ;
−→MA(2→ 1) = −
−→MA(1→ 2)
Le contact est dit etre sans frottement si ~r1→2(M) est perpendiculaire a la surface S en chaquepoint M . On dit alors que la liaison est sans frottement ou bien que la liaison est parfaite.

18 CHAPITRE 2. MECANIQUE DES STRUCTURES
AS
Σ1
M
Σ2
~r1→2(M) ∆S
Fig. 2.11 – Deux solides en contact
C’est en fait une hypothese sur la liaison, car dans celle-ci, meme s’il n’est pas souhaite, il ya toujours un peu de frottement. Dans certains mecanismes, on cherche au contraire a avoir lemaximum de frottement, comme par exemple dans le contact frein - jante de la roue d’un velo.
Nous allons maintenant etudier quelques liaisons simples (en fait 6).
a) Liaison ponctuelle
Definition
Les deux solides Σ1 et Σ2 ont une liaison ponctuelle si au cours de leur mouvement relatif,les deux solides restent en contact (Fig. 2.12). Sur la figure 2.12, les deux solides sont notes Σ1
et Σ2, et le point de contact est note O. De plus, on suppose que les deux solides ont le memeplan tangent en O.
Plan tangent aΣ1 et Σ2 en O
Σ1
Σ2
O
x
y
z
Fig. 2.12 – Liaison ponctuelle
Soit le repere (O;x, y, z) orthonorme direct attache a Σ1, l’axe (O, y) etant normal en O auplan tangent en O a Σ1 et a Σ2. Dans le repere (O;x, y, z), les mouvements de Σ2 par rapporta Σ1 peuvent etre des rotations (rotations autour des trois axes (O, x), (O, y) et (O, z)) et destranslations (translations parallelement a l’axe (O, x) et parallelement a l’axe (O, z)). Il s’agit

2.3. LIAISONS PARFAITES DANS L’ESPACE 19
en fait de petits mouvements, le point de contact des deux solides restant au voisinage du pointO initial. Naturellement, il ne peut pas y avoir de translation parallelement a l’axe (O, y) sansrompre le contact.Nous voyons que la liaison ponctuelle a 5 degres de liberte (2 de translation et 3 derotation).
Au niveau des efforts exerces par Σ1 sur Σ2, en adoptant l’approximation de la liaison parfaiteet sachant que la surface de contact est ici reduite a un point, on a :
−→R(1→ 2) = Y ~y ;
−→MO(1→ 2) = ~0
Le vecteur ~y est le vecteur unitaire de l’axe (O, y). Il faut bien noter que le moment est prisau point O. Le vecteur
−→R (1 → 2) est normal au plan tangent en O a Σ1 et a Σ2. Sur les 6
composantes des vecteurs−→R(1→ 2) et
−→MO(1→ 2), 5 sont determinees et valent 0, a savoir les
trois composantes de−→MO(1→ 2) et les deux composantes de
−→R(1→ 2).
b) Liaison glissiere
Definition
Les deux solides Σ1 et Σ2 ont une liaison glissiere si le seul mouvement relatif possible del’un par rapport a l’autre est une translation rectiligne suivant un axe lie aux solides Σ1 et Σ2
(Fig. 2.13).
y
y
O
O
x
x
z
Σ1
Σ1
Σ2
Σ2 ���
Figure dans leplan (O;x, z)
Fig. 2.13 – Liaison glissiere
Soit le repere (O;x, y, z) orthonorme direct attache a Σ1, l’axe (O, x) etant l’axe de translation.Le seul mouvement possible de Σ2 par rapport a Σ1 est une translation parallele a l’axe (O, x).Nous voyons que la liaison glissiere a un seul degre de liberte (translation parallele a(O, x)).
La surface S de contact est une surface cylindrique de generatrices paralleles a (O, x). Laforce ~r1→2(M) ∆S exercee par Σ1 sur Σ2 sur la petite surface ∆S de S est normale a (O, x), carla petite surface ∆S est parallele a (O, x). D’ou :
−→R(1→ 2) = Y ~y + Z ~z ;
−→MO(1→ 2) = L~x + M ~y + N ~z

20 CHAPITRE 2. MECANIQUE DES STRUCTURES
Les vecteurs ~x, ~y, ~z sont les vecteurs unitaires des axes (O, x), (O, y), (O, z). Les quantites Y ,Z et L, M , N sont les composantes de
−→R(1→ 2) et de
−→MO(1→ 2) dans la base orthonormee (~x,
~y, ~z). Comme precedemment, il faut noter que le moment est pris au point O. Enfin, remarquonsque sur les 6 composantes des vecteurs
−→R(1 → 2) et
−→MO(1 → 2), une seule est determinee et
vaut 0, la composante de−→R(1→ 2) sur l’axe (O, x).
c) Liaison rotule (dite aussi liaison spherique)
Definition
Les deux solides Σ1 et Σ2 ont une liaison rotule si les seuls mouvements relatifs possibles del’un par rapport a l’autre sont des rotations autour d’un point O lie aux solides Σ1 et Σ2 (Fig.2.14).
Σ1
Σ2
Ox
y
z
~r1→2
Fig. 2.14 – Liaison rotule
Soit le repere (O;x, y, z) orthonorme direct attache a Σ1. Le mouvement de Σ2 par rapport aΣ1 est une rotation quelconque autour de O.Nous voyons que la liaison rotule a 3 degres de liberte (les 3 rotations autour des 3 axes(O, x), (O, y) et (O, z)).
La surface S de contact est une surface spherique de centre O. La force ~r1→2(M) ∆S exerceepar Σ1 sur Σ2 sur la petite surface ∆S de S est normale a S ; comme consequence le support de~r1→2(M) ∆S passe par le point O. D’ou :
−→R(1→ 2) = X ~x + Y ~y + Z ~z ;
−→MO(1→ 2) = ~0
Il faut noter que le moment est pris au point O, centre de la liaison rotule. Remarquons quesur les six composantes des vecteurs
−→R(1→ 2) et
−→MO(1→ 2), trois sont determinees et valent
0, les trois composantes de−→MO(1→ 2).
d) Liaison pivot
Definition
Les deux solides Σ1 et Σ2 ont une liaison pivot si le seul mouvement relatif possible de l’unpar rapport a l’autre est une rotation autour d’un axe lie aux solides Σ1 et Σ2 (Fig. 2.15).

2.3. LIAISONS PARFAITES DANS L’ESPACE 21
Σ1
Σ2
Ox
y
z
~r1→2
Fig. 2.15 – Liaison pivot
Soit le repere (O;x, y, z) orthonorme direct attache a Σ1, l’axe (O, x) etant l’axe de rotation. Leseul mouvement possible de Σ2 par rapport a Σ1 est une rotation autour de l’axe (O, x).Nous voyons que la liaison pivot a un seul degre de liberte (rotation autour de l’axe (O, x)).
La surface S de contact est une surface de revolution autour de l’axe (O, x). La force~r1→2(M) ∆S exercee par Σ1 sur Σ2 sur la petite surface ∆S de S est normale a cette sur-face. Comme consequence, le support de ~r1→2(M) ∆S rencontre l’axe (O, x). Le moment en Ode ~r1→2(M) ∆S est par suite normal a l’axe (O, x). D’ou :
−→R(1→ 2) = X ~x + Y ~y + Z ~z ;
−→MO(1→ 2) = M ~y + N ~z
Comme precedemment, il faut noter que le moment est pris au point O situe sur l’axe derotation. Enfin, remarquons que sur les six composantes des vecteurs
−→R(1→ 2) et
−→MO(1→ 2),
une seule est determinee et vaut 0, la composante de−→MO(1→ 2) sur l’axe (O, x).
e) Liaison pivot glissant
Definition
Les deux solides Σ1 et Σ2 ont une liaison pivot glissant si les seuls mouvements relatifspossibles de l’un par rapport a l’autre sont une translation rectiligne suivant un axe lie auxsolides Σ1 et Σ2, et une rotation autour de ce meme axe (Fig. 2.16).
Σ1
Σ2
Ox
y
z
~r1→2
Fig. 2.16 – Liaison pivot glissant
Soit le repere (O;x, y, z) orthonorme direct attache a Σ1, l’axe (O, x) etant l’axe a la fois detranslation et de rotation. Les seuls mouvements possibles de Σ2 par rapport a Σ1 sont une

22 CHAPITRE 2. MECANIQUE DES STRUCTURES
translation parallele a l’axe (O, x) et une rotation autour de l’axe (O, x). On peut remarquerque la liaison pivot glissant est la combinaison des deux liaisons, liaison pivot ey liaison glissiere.Nous voyons que la liaison pivot glissant a un deux degres de liberte (translation parallelea (O, x) et rotation autour de (O, x)).
La surface S de contact est une surface cylindrique de revolution de generatrices parallelesa (O, x). La force ~r1→2(M) ∆S exercee par Σ1 sur Σ2 sur la petite surface ∆S de S est normalea cette surface et son support rencontre l’axe (O, x). Comme consequence, le moment en O de~r1→2(M) ∆S est normal a l’axe (O, x), et la resultante
−→R(1 → 2) est normal a l’axe (O, x).
D’ou :−→R(1→ 2) = Y ~y + Z ~z ;
−→MO(1→ 2) = M ~y + N ~z
Comme precedemment, il faut noter que le moment est pris au point O situe sur l’axe derotation. Enfin, remarquons que sur les six composantes des vecteurs
−→R(1→ 2) et
−→MO(1→ 2),
deux sont determinees et valent 0, les composantes de−→R(1 → 2) et de
−→MO(1 → 2) sur l’axe
(O, x).
f) Liaison encastrement
Definition
Les deux solides Σ1 et Σ2 ont une liaison d’encastrement si aucun mouvement relatif de l’unpar rapport a l’autre n’est possible (Fig. 2.17). Ce n’est pas, a proprement parler, une liaisoncar il n’y a aucune mobilite.
Σ1
Σ2
Ox
y
z
Fig. 2.17 – Liaison encastrement
La liaison encastrement n’a aucun degre de liberte.Soit le repere (O;x, y, z) orthonorme direct attache a Σ1. La surface S de contact entre Σ1 et Σ2
n’a aucune geometrie particuliere et les efforts ~r1→2(M) ∆S exerces par Σ1 sur Σ2 sur la petitesurface ∆S de S n’ont aucune propriete particuliere. Les vecteurs
−→R(1→ 2) et
−→MO(1→ 2) sont
completement indetermines. Soit :
−→R(1→ 2) = X ~x + Y ~y + Z ~z ;
−→MO(1→ 2) = L~x + M ~y + N ~z
Dans le cas present, le point O ou est calcule le moment n’a pas une position particuliere.Pour finir, remarquons que, sur les six composantes des vecteurs
−→R(1 → 2) et
−→MO(1 → 2),
aucune n’est determinee.

2.4. LIAISONS PARFAITES DANS LE PLAN 23
Remarque
Pour chaque liaison decrite precedemment, en meme temps que nous l’avons definie, nousavons imagine et represente sur une figure une realisation technologique possible. Mais il fautbien noter qu’un mouvement donne d’un solide Σ1 par rapport a un second solide Σ2 peut etrerealise de plusieurs facons differentes. Par exemple, la liaison entre une roue de bicyclette et sonmoyeu, la liaison entre le balancier et le support d’une horloge, la liaison entre l’axe sur lesquelssont fixes les fouets et le corps d’un batteur pour la cuisine, . . . sont des liaisons pivot.
Tableau recapitulatif
LiaisonMouvementsde translation
possibles
Mouvementsde rotationpossibles
−→R (1→ 2)
−→MO(1→ 2)
Ponctuelle (O, x), (O, z) (O, x), (O, y), (O, z) Y ~y ~0
Glissiere (O, x) Y ~y + Z~z L~x + M~y + N~z
Rotule (O, x), (O, y), (O, z) X~x + Y ~y + Z~z ~0
Pivot (O, x) X~x + Y ~y + Z~z M~y + N~z
Pivot glissant (O, x) (O, x) Y ~y + Z~z M~y + N~z
Encastrement X~x + Y ~y + Z~z L~x + M~y + N~z
Remarque
Pour chaque liaison, le nombre d’inconnues de liaison (a savoir X, Y , Z et L, M , N) augmentedu nombre de degres de liberte est egal a 6.
2.4 Liaisons parfaites dans le plan
Dans ce paragraphe, on va considerer des objets plans. La modelisation des liaisons entredeux objets s’en trouvera simplifiee, par rapport a celle vue precedemment pour deux solidesdans l’espace. La description geometrique des objets plans est aussi plus simple.
2.4.1 Probleme plan
Considerons un objet solide plan Σ (par exemple une plaque, ou le plateau d’une table donton neglige l’epaisseur) situe dans le plan (P ) (Fig. 2.18a). Nous faisons les hypotheses suivantes :
– toutes les forces considerees, et aussi leur resultante, sont dans le plan (P )– tous les moments des forces en un point A du plan (P ) sont perpendiculaires
au plan (P )– pour deux solides plans Σ1 et Σ2 situes dans le plan (P ) et en liaison l’un avec
l’autre, les mouvements possibles sont tels que Σ1 et Σ2 restent situes dans leplan (P ).
Sous l’ensemble de ces hypotheses, le systeme mecanique considere est dit plan, et leprobleme est dit probleme plan.

24 CHAPITRE 2. MECANIQUE DES STRUCTURES
~F est parallele a P−→MA est perpendiculaire a P
y y
x xplan (P )
A
ΣOΣ1
Σ2
(a) (b)
Fig. 2.18 – Probleme plan
2.4.2 Liaisons parfaites dans le plan
Considerons deux solides plans Σ1 et Σ2 situes dans le plan (P ) en liaison l’un avec l’autre.Certaines liaisons spatiales decrites dans le paragraphe precedent conservent le caractere
plan d’un probleme. Le caractere plan demeure, par exemple, dans le cas de la liaison glissiered’axe (O, x) avec le point O et l’axe (O, x) dans le plan (P ) (Fig. 2.19b). Pour les problemesplans on retiendra les quatre liaisons suivantes :
y y
x
x
O
OΣ1
Σ1
Σ2
Σ2
plan (P ) plan (P )
(a) Contact ponctuel (b) Liaison glissiere
y y
x
x
O
OΣ1
Σ1Σ2
Σ2
plan (P ) plan (P )
(c) Liaison pivot (d) Encastrement
Fig. 2.19 – Liaisons parfaites dans le plan
a) Liaison ponctuelle
Dans le plan (P ), les deux solides Σ1 et Σ2 demeurent en contact. Le repere (O;x, y, z)orthonorme direct est lie a Σ1 ; l’axe (O, z) est normal a (P ) et l’axe (O, y) est normal a la

2.4. LIAISONS PARFAITES DANS LE PLAN 25
droite tangente en (O) aux deux solides (Fig. 2.19a). Par rapport au repere (O;x, y) dans leplan (P ), les mouvements de Σ2 par rapport a Σ1 peuvent etre une rotation autour de l’axe(O, z) et une translation parallelement a l’axe (O, x).
La liaison ponctuelle a deux degres de liberte.Au niveau des efforts exerces par Σ1 sur Σ2, en adoptant l’approximation de la liaison
parfaite, on a :−→R(1→ 2) = Y ~y ;
−→MO(1→ 2) = ~0
On voit donc que l’action de Σ1 sur Σ2 est une force unique Y ~y appliquee en O. En d’autrestermes, c’est un glisseur : {O, Y ~y}.
b) Liaison glissiere
Les deux solides Σ1 et Σ2 ont une liaison glissiere si le seul mouvement relatif possible del’un par rapport a l’autre est une translation rectiligne suivant un axe (O, x) lie aux solides Σ1
et Σ2 (Fig. 2.19b). Le repere (O;x, y, z) orthonorme direct est lie a Σ1 ; l’axe (O, z) est normala (P ) et l’axe (O, x) est lie aux deux solides. Par rapport au repere (O;x, y) dans le plan (P ) leseul mouvement possible de Σ2 par rapport a Σ1 est une translation parallele a l’axe (O, x).
La liaison glissiere a un degre de liberte.Au niveau des efforts exerces par Σ1 sur Σ2, en adoptant l’approximation de la liaison
parfaite, on a :−→R(1→ 2) = Y ~y ;
−→MO(1→ 2) = Z ~z
c) Liaison pivot
Les deux solides Σ1 et Σ2 ont une liaison pivot si le seul mouvement relatif possible de l’unpar rapport a l’autre est une rotation autour de l’axe (O, z) (Fig. 2.19c) lie aux deux solides.Le repere (O;x, y, z) orthonorme direct est lie a Σ1 ; l’axe (O, z) est normal a (P ). Par rapportau repere (O;x, y) dans le plan (P ) le seul mouvement possible de Σ2 par rapport a Σ1 est unerotation autour de l’axe (O, z).
La liaison pivot a un degre de liberte.Au niveau des efforts exerces par Σ1 sur Σ2, en adoptant l’approximation de la liaison
parfaite, on a :−→R(1→ 2) = X ~x + Y ~y ;
−→MO(1→ 2) = ~0
On voit donc que l’action de Σ1 sur Σ2 est une force unique X ~x + Y ~y appliquee en O. End’autres termes, c’est un glisseur : {O,X ~x + Y ~y}.
d) Liaison encastrement
Les deux solides Σ1 et Σ2 ont une liaison d’encastrement si aucun mouvement relatif de l’unpar rapport a l’autre n’est possible (Fig. 2.19d). Ce n’est pas, a proprement parler, une liaisoncar il n’y a aucune mobilite. Au niveau des efforts exerces par Σ1 sur Σ2, on a :
−→R(1→ 2) = X ~x + Y ~y ;
−→MO(1→ 2) = N ~z

26 CHAPITRE 2. MECANIQUE DES STRUCTURES
Tableau recapitulatif
LiaisonMouvementsde translation
possibles
Mouvementsde rotationpossibles
−→R (1→ 2)
−→MO(1→ 2)
Ponctuelle (O, x) (O, z) Y ~y ~0
Glissiere (O, x) Y ~y N~z
Pivot (O, z) X~x + Y ~y ~0
Encastrement X~x + Y ~y N~z
Remarque
Pour chaque liaison, le nombre d’inconnues de liaison (X, Y et/ou N) augmente du nombrede degres de liberte est egal a 3.
2.4.3 Appui fixe, appui mobile
Tres souvent, pour les problemes plans et pour certaines liaisons, on utilise la terminologied’appuis : appuis fixes ou appuis mobiles. On a les definitions suivantes :
Appui fixe en O
Les deux solides Σ1 et Σ2 du plan (P ) ont une liaison pivot parfaite (voir le sous-paragraphec) ci-dessus) d’axe (O, z) perpendiculaire au plan (P ).
Une telle liaison est appelee « appui fixe en O ».Elle est representee par le schema donne sur la figure 2.20a. Naturellement, on a :
−→R(1→ 2) = X ~x + Y ~y et MO(1→ 2) = ~0
L’action de Σ1 sur Σ2 est un glisseur {O,−→R(1→ 2)} = {O,X ~x + Y ~y}.
Appui mobile dans la direction (O, x)
Les deux solides Σ1 et Σ2 du plan (P ) sont lies par la realisation successive de deux liaisons :une liaison pivot parfaite d’axe (O, z) perpendiculaire au plan (P ), et une liaison glissiere parfaited’axe (O, x) (voir les sous-paragraphes c) et b) ci-dessus).
Une telle liaison est appelee « Appui mobile dans la direction (O, x) ».Elle est representee par le schema donne sur la figure 2.20b. Naturellement, on a :
−→R(1→ 2) = Y ~y et MO(1→ 2) = ~0
L’action de Σ1 sur Σ2 est un glisseur {O,−→R(1→ 2)} = {O, Y ~y}.
2.5 Relations contraintes - deformations
L’observation d’un corps solide soumis a un chargement montre, en general, que le solidesubit une deformation. Celle-ci peut etre tres importante (etirement d’un morceau de caou-tchouc, froissement d’une tole de voiture suite a un accident) ou tres faible (effort du a un ventmodere sur un mur, deformations des pieds d’une chaise dues au poids d’un enfant). Tous les cas

2.5. RELATIONS CONTRAINTES - DEFORMATIONS 27
Σ1 Σ1
Σ2 Σ2
O O
y y
x x
Plan (P ) Plan (P )
(a) Appui fixe en O (b) Appui mobile en O
Fig. 2.20 – Appui fixe - Appui mobile dans la direction (O, x)
intermediaires de deformations sont naturellement possibles. Dans ce paragraphe, nous allonspreciser ce que l’on entend par materiau solide en traction ou en compression. Nous decrironsensuite les comportements les plus classiques des materiaux : comportement elastique, compor-tement plastique, . . .
2.5.1 Phenomene de traction - compression
a) Description de l’essai de traction - compression
Le materiau a etudier constitue l’eprouvette : c’est un fut cylindrique (la partie utile) etdeux tetes qui permettent de l’amarrer a un porte-eprouvette (Fig. 2.21). Cette eprouvette estplacee dans la machine decrite sur la figure 2.21.
dynamometre -
dispositifd’amarrage
-
capteur dedeplacement
- eprouvette�
generateurde force
-
sol -
fut
jauge
Eprouvette
Fig. 2.21 – Machine de traction - compression

28 CHAPITRE 2. MECANIQUE DES STRUCTURES
La machine, appelee « machine de traction - compression », permet d’imposer une forcedans la direction de l’axe de l’eprouvette. En fait, on realise deux forces egales et opposees surchacune des deux tetes. La machine permet de controler l’allongement.
Les forces sont mesurees avec un dynamometre et les allongements a l’aide d’un capteurde deplacement (ou extensiometre).
d0d
Fig. 2.22 – Reperes permettant de mesurer la deformation
Pour l’allongement, on mesure la distance d0 entre deux reperes traces sur l’eprouvette libre(Fig. 2.22), puis la distance d entre ces deux memes reperes sur l’eprouvette tractee (les forcestendent a l’etirer) ou comprimee (les forces tendent a la raccourcir).
On appelle deformation la quantite ε correspondant a l’allongement relatif :
ε =d− d0
d0(2.5)
Si l’eprouvette est bien calibree, ε ne depend ni de d0, ni de la place occupee par les deuxreperes sur le fut de l’eprouvette. Suivant le signe de ε, on utilisera la terminologie de tractionou de compression :
ε ≥ 0 TRACTION ε ≤ 0 COMPRESSION
b) Notion de contrainte
On suppose que les efforts exerces sur une tete de l’eprouvette sont schematises par une forceF ~x dans la direction de l’axe de l’eprouvette et appliquee en un point de cet axe. Sur l’autretete on aura la force −F ~x (Fig. 2.23a).
Considerons une section normale A du fut et par la pensee otons la partie gauche (G) del’eprouvette (Fig. 2.23b). Afin de maintenir la partie droite (D) en equilibre, il faut imaginerque des efforts s’exercent sur toute la surface de la section A. On admet que l’on a une densitesurfacique uniforme d’efforts normaux a la section A : −σ ~x. On pose :
N = S σ
ou S designe l’aire de la section A.L’equilibre du troncon (D) impose : F ~x−N ~x = ~0 soit N = F .De meme l’equilibre du troncon (G) impose : −F ~x + N ~x = ~0 avec le meme N et le meme
σ que dans l’etude du troncon (D) (voir Fig. 2.23c).

2.5. RELATIONS CONTRAINTES - DEFORMATIONS 29
x−F ~x
−F ~x
F ~x
F ~x
A
A
A
(G)
(G)
(D)
(D)−N ~x
N ~x
−σ ~x
σ ~x
(D)
(G)
(a)
(b)
(c)
Fig. 2.23 – Notion de contrainte
Definition
σ s’appelle la contrainte normale.Au niveau du signe de σ, σ ≥ 0 correspond a un phenomene de traction, et σ ≤ 0 correspond
a un phenomene de compression. Remarquons que (−σ) serait une pression.N s’appelle la tension. On a : N = σS.
La contrainte σ est positive pour une traction et est negative pour une compression.La tension N est positive pour une traction et est negative pour une compression.
Remarque
S est l’aire de la section de l’eprouvette sur laquelle on exerce la force F , c’est-a-direl’eprouvette deformee. Cette aire S est generalement differente de l’aire S0 de l’eprouvette surlaquelle ne s’exerce aucune force. Les deux aires S et S0 sont en general tres voisines.
c) Types d’essais. Notion de lois de comportement
La machine de traction - compression impose, au cours du temps t, soit la force F c’est-a-direσ, soit la deformation c’est-a-dire l’allongement relatif ε. On mesure alors, soit la deformation ε,soit la contrainte σ. Autrement dit, a chaque instant t, on obtient une valeur σ(t) pour σ et unevaleur ε(t) pour ε. L’essai de traction - compression donne lieu a deux courbes σ et ε en fonctiondu temps t, c’est-a-dire σ = σ(t) et ε = ε(t) (Fig. 2.24a et Fig. 2.24b). On peut aussi mettre surun meme graphe σ(t) et ε(t) comme ceci est montre sur la figure 2.24c.
0 0 0t t
σ σε
ε
σ(t) σ(t)
ε(t)
ε(t)t t(a) (b) (c)
Fig. 2.24 – Courbes de reponse suite a un essai de traction-compression

30 CHAPITRE 2. MECANIQUE DES STRUCTURES
Definition
On appelle loi de comportement du materiau constituant l’eprouvette, la loi qui donnel’une des fonctions σ(t) ou ε(t) en fonction de l’autre ε(t) ou σ(t).
Nous donnerons plus loin quelques exemples de lois de comportement.Dans certaines experiences de traction - compression, les eprouvettes du materiau sont sou-
mises a des essais pousses parfois jusqu’a la rupture. Afin de permettre des comparaisons, lesessais doivent etre bien precises et reproductibles. Ci-apres, nous donnons deux essais types.Chacun d’eux caracterise un phenomene physique.
Essai de fluage
L’essai est realise en maintenant la contrainte σ constante : σ = cste = σ0.On appelle fluage la propriete qu’a le materiau de voir son allongement croıtre a contrainte
fixee dans un essai de traction. Sur la figure 2.25, les courbes (1) et (2) sont deux exemples dereponse.
0 0t t
σ
σ0
σ = σ0 pour t positif
ε (1)
(2)
Les courbes (1) et (2) sontdeux exemples de reponse.
Fig. 2.25 – Essai de fluage
Essai de relaxation
L’essai est realise en maintenant la deformation ε constante : ε = cste = ε0, apres unecroissance lieaire en t (Fig. 2.26).
On appelle relaxation la propriete qu’a le materiau de voir sa contrainte decroıtre adeformation fixee dans un essai de traction. Sur la figure 2.26, les courbes (1) et (2) sont deuxexemples de reponse.
0 0t t
t0 t0
ε
ε0
σ
(1)
(2)
ε = ε0 pour t > t0 Les courbes (1) et (2) sontdeux exemples de reponse.
Fig. 2.26 – Essai de relaxation

2.5. RELATIONS CONTRAINTES - DEFORMATIONS 31
Remarque
– On peut verifier que le comportement (1) dans les deux essais, est bien decrit par une loide la forme
dε
dt=
1EM
dσ
dt+
σ
η(EM et η constants)
appelee loi de comportement viscoelastique de Maxwell (par exemple comportement d’unpolyethylene fondu).
– De meme, on peut verifier que le comportement (2) dans les deux essais, est bien decritpar une loi de la forme
σ = EKV ε + ηdε
dt(EKV et η constants)
appelee loi de comportement viscoelastique de Kelvin–Voigt (par exemple pate silicone(connu sous le terme de silly-putty), certaines resines, . . . ).
2.5.2 Elasticite, plasticite, elasticite, rupture
a) Loi de comportement de l’elasticite
Une loi de comportement largement utilisee et qui est correcte pour beaucoup de materiaux,est celle de l’elasticite : la valeur de σ a l’instant t ne depend que de la valeur de la deformationε au meme instant. La loi est independante de t. Autrement dit, on a :
σ = f(ε)
Un tel comportement est donne sur la figure 2.27a.Si de plus, la fonction f(ε) est lineaire (Fig. 2.27b), on dit que la loi de comportement est
celle de l’elasticite lineaire, dite loi de Hooke (Robert Hooke (1635–1702)).
σ = E ε (E = cste , Loi de Hooke) (2.6)
Le coefficent E s’appelle module d’Young (Thomas Young (1773–1829)). Il depend dumateriau. Nous donnons dans le tableau ci-apres quelques valeurs numeriques pour E.
La loi de Hooke (2.6) est verifiee experimentalement pour de tres nombreux materiaux maisa condition de considerer des petites deformations ε.
σ σ
ε ε0 0
(a) Elasticite non lineaire (b) Elasticite lineaire
Fig. 2.27 – Comportement plastique

32 CHAPITRE 2. MECANIQUE DES STRUCTURES
Remarque sur les unites
– La tension N est une force : elle s’exprime en newton– La contrainte σ est une force par unite de surface : elle s’exprime en pascal note « Pa ».– La deformation ε est un allongement relatif. Elle n’a pas d’unites.– Le module d’Young E s’exprime comme σ (voir (6)) : il s’exprime en pascal (Pa).– On a : 1 kPa = 103 Pa, 1 MPa = 106 Pa
Quelques valeurs numeriques pour le module E d’Young :
Acier E = 2 105 MPa
Cuivre E = 105 MPa
Beton E = 3 104 MPa
Bois E = 1.7 104 MPa
Caoutchouc E = 2 MPa
Exemples simples d’application de la loi de Hooke
Soit un barreau de longueur `0 = 1 m et de section S = 1 cm2 sur lequel on exerce une forcede traction F = 100 N. On va determiner l’allongement ∆` du barreau. On a :
σ =F
S, ε =
σ
E(Loi de Hooke), ∆` = `0 ε
D’ou :∆` =
F `0
S E
Pour un barreau en acier :
∆` =100× 1
10−4 × (2× 105 × 106)= 0.5× 10−5 m = 5µm
Pour un barreau en bois :
∆` =100× 1
10−4 × (1.7× 104 × 106)= 0.6× 10−4 m = 0.06 mm
Pour un barreau en caoutchouc, le meme calcul que ci-dessus conduit a :
∆` =100× 1
10−4 × 2× 106= 0.5 m
Dans ce dernier cas, l’allongement est important : la loi de Hooke peut etre mise en doute.En general, la loi de Hooke est etre utilisee pour des petites deformations (ε petit avec par
exemple ε < 0.05.
b) La plasticite
Nous decrivons ci-apres ce que l’on entend par un comportement plastique. Le materiaudecrit est dit : solide elastique parfaitement plastique.
La machine de traction - compression impose, au cours du temps, la deformation ε(t) decritesur la figure 2.28a : ε(t) croıt lineairement avec le temps t, puis est maintenue constante et enfindecroıt lineairement avec t. D’ou les trois segments OA1A2, A2A3 et A3A4.
Le diagramme de la reponse σ(t) est donne sur la figure 2.28b, les points B1, B2, B3 et B4
correspondant aux quatre points A1, A2, A3 et A4. On admet que la reponse est la suivante :

2.5. RELATIONS CONTRAINTES - DEFORMATIONS 33
t1 t1t2 t2t3 t3t4 t4O Ot t
ε(t)
A1
A2 A3
A4
σ(t)B1 B2 B3
B4
σL
σ
σL
O C4
C1 C2 = C3
ε
σL est le seuilde plasticite
(a) (b)
(c)
Fig. 2.28 – Comportement plastique
dans la phase OB1, σ croıt lineairement avec t ; sur la phase B1B2B3, σ demeure constant etegal σL ; enfin sur la phase B3B4, σ decroıt lineairement avec t. De plus dans les deux phasesde croissance (phase OB1) et de decroissance (phase B3B4), et on admet que le rapport ∆σ/∆εest le meme au signe pres.
Il est a noter qu’entre les instants t1 et t2, l’allongement ε croıt lineairement avec t et lacontrainte σ demeure constante et egale a σL.
Dessinons maintenant le graphe de σ en fonction de ε (Fig. 2.28c). Les points C1, C2, C3,C4 correspondent naturellement a A1, A2, A3, A4 et a B1, B2, B3, B4. Sur OC1, ε et σ croissenttous les deux ; sur C1C2, ε croıt et σ reste egal a σL ; sur C2C3, ε et σ sont constants et les deuxpoints C2 et C3 sont confondus : enfin sur C3C4, ε et σ decroissent tous les deux.
Le cas que nous venons de decrire correspond au fait que σ plafonne a un seuil σ = σL ditseuil de plasticite.Le seuil de plasticite est caracterise par les proprietes suivantes :
– tant que le seuil de plasticite n’est pas atteint, le comportement du materiau est reversible ;on parcourt le segment OC1 dans les deux sens. Cette partie est la partie elastique dumateriau. Sur le segment OC1 la deformation et la contrainte sont, en realite, relativement« petites ».
– si le seuil de plasticite est atteint avec σ = σL, on a encore un allongement : on dit quel’on est dans un domaine d’ecoulement plastique.
– si ensuite on relache la contrainte, on quitte la courbe horizontale C1C2C3 et on suit letrajet C3C4. Pour une contrainte σ nulle (σ = 0), le materiau conserve un allongementdonc reste deformee.
Exemples de materiaux tres plastiques : cuivre, aluminium, laiton, . . .
Remarque
Naturellement les lois de comportement pour des materiaux reels ne sont pas aussi simplesque celles que nous avons schematisees ci-dessus. Cependant, ces lois constituent de bonnesapproximations pour de tres nombreux problemes de Resistance des Materiaux.

34 CHAPITRE 2. MECANIQUE DES STRUCTURES
c) La rupture
Naturellement un materiau qui est trop fortement sollicite ou trop souvent sollicite peut etreamene a se rompre. Nous introduisons ici la notion de rupture fragile et de rupture par fatigue.
σ
σM
σm
0 tExemple de succession de cycles
Fig. 2.29 – Essai pour la rupture par fatigue
Rupture fragile
Le materiau est en apparence elastique, mais a un certain seuil de contrainte, il se romptavec un aspect de rupture lisse. Le materiau se casse.
Exemples : la fonte, la pierre, le beton, le verre, . . .Les contraintes de rupture a la traction sont de l’ordre de 30 MPa = 3 106 Pa pour la fonte
et de 0.5 MPa = 5 105 Pa pour le beton.
Rupture par fatigue
On envisage une succession de cycles ou la contrainte (en traction) varie entre deux valeursσm et σM (Fig. 2.29). Le materiau n’etant pas parfaitement elastique, il reste apres chaquecycle, une deformation (allongement) infinitesimale mais residuelle. Au bout d’un tres grandnombre de cycles, la somme de toutes ces deformations infinitesimales peut entraıner la rupturedu materiau.
Remarques
On peut envisager d’autres types de rupture. Un materiau plastique sollicite trop longtempspar la contrainte egale au seuil de plasticite peut se rompre. Pour des raisons de vieillissement,un materiau sollicite un tres grand nombre de fois par de la traction et de la compression peutse deteriorer.
2.6 Dilatation thermique
On n’a pas pris en compte, dans tout ce qui precede, le terme d’energie cinetique lie al’agitation thermique des molecules et des atomes au sein du materiau considere. En effet, on peutsupposer qu’un atome vibre entre des positions extremes dont la moyenne determine l’evolutiondes positions d’equilibre avec la temperature. C’est l’origine de la dilatation thermique.
On peut ecrire pour un barreau de longueur `0 a la temperature T0, et de longueur ` a latemperature T , que la dilatation thermique ∆` = `− `0 vaut :
∆` = `0 α ∆T (2.7)

2.6. DILATATION THERMIQUE 35
ou α est le coefficient de dilatation thermique que nous supposons constant dans ce qui suit,et ou ∆T = T − T0 est la variation de temperature par rapport a la temperature de referenceT0.
On deduit de cette equation la dilatation thermique relative (appelee aussi deformationthermique) :
∆`
`0= α ∆T
Remarques sur les unites
– Le rapport ∆`/`0 n’a pas d’unites. On dit que c’est une grandeur sans dimension.– Le coefficient de dilatation thermique α a pour unite K−1 (K pour Kelvin).
La loi ∆` = `0 α ∆T avec α constant, est verifiee experimentalement pour des variationsde temperature ∆T moderees. Nous donnons ci-apres quelques valeurs numeriques pour α, latemperature de reference etant de l’ordre de la temperature ambiante (20 degres Celsius).
Aluminium α = 2.4 10−5 K−1
Cuivre α = 1.7 10−5 K−1
Acier α = 1.2 10−5 K−1
Platine α = 0.9 10−5 K−1
Bore α = 0.2 10−5 K−1
Contrainte d’origine thermique
Rappelons la loi de l’elasticite lineaire de Hooke reliant contrainte et deformation (formule(2.6)) :
σ = E ε avec ε = ∆`/`0
Lorsque l’allongement provient d’une variation de temperature ∆T comme cela a ete vuci-dessus avec la relation (2.7), on a :
σ = E α ∆T (2.8)
Dans (2.8) l’origine de la contrainte σ est thermique.
Contrainte d’origine thermique et mecanique
Dans le cas general d’une sollicitation a la fois mecanique et thermique, on a l’addition desdeux effets soit :
∆`
`0=
∆`th
`0+
∆`m
`0
Les indices « th » et « m » se referent a thermique et a mecanique. On a toujours la loi deHooke. Ainsi :
σ = E∆`
`0= E
{∆`th
`0+
∆`m
`0
}= E α ∆T + E εm avec εm =
∆`m
`0
A partir de ce type de relation, et evidemment de donnees sur les materiaux, il est possiblede justifier le dimensionnement de structures simples de type poteaux.

36 CHAPITRE 2. MECANIQUE DES STRUCTURES
2.7 Mecanique des structures : Exercices avec correction
Dans ce paragraphe, les exercices avec corriges presentes sont des applications directes ducours. Ils illustrent les quatre points suivants :
1. Principe fondamental de la statique applique a un corps solide isole (exercices 1, 2 et 3)
2. Systeme de plusieurs corps solides (exercice 4)
3. Loi de l’elasticite lineaire de Hooke (exercices 5 et 6)
4. Contraintes (exercices 7, 8 et 9)
D’apres des enonces proposes par Y. Berthaud en 2005-06
2.7.1 Exercice 1 : Seau suspendu a un cable
Le but est l’application du principe fondamental de la statique a un corps isole.On a le seau et le cable de la figure (Fig. 2.30a). Calculer la valeur de l’effort Fc en fonction
de l’intensite de la pesanteur g et de la masse du seau M . Le terme « seau » represente l’ensembledu recipient, de son contenu et de l’anse. Le cable est suppose sans masse.
z
g
~Fc
~Fc
A
A
G
M ~g
(a) (b)
Fig. 2.30 – Seau suspendu
Corrige
Il s’agit d’appliquer le principe fondamental de la statique (paragraphe 2.2.2) a un corps isole.La demarche est la suivante :
1. Il faut definir le systeme Σ auquel on veut appliquer le principe fondamental.
2. Il faut ensuite faire tres soigneusement l’inventaire des forces exercees sur le systeme Σ.
3. Enfin il faut appliquer le principe fondamental de la statique a Σ.Ici on choisit le seau comme systeme Σ.
Les efforts exterieurs exerces sur le seau sont :
1. la force ~Fc appliquee en A et verticale (Fig. 2.30a) due au cable. Cette force correspondau glisseur {A, ~Fc}.
2. la force de pesanteur appliquee en G, centre de gravite du seau. Cette force correspond auglisseur {G, M ~g}, ~g etant le vecteur acceleration de la pesanteur.

2.7. MECANIQUE DES STRUCTURES : EXERCICES AVEC CORRECTION 37
Le principe fondamental de la statique applique au seau conduit a :
{A, ~Fc}+ {G, M ~g} = ~0
Le premier membre est la somme de deux glisseurs (paragraphe 2.2.1). L’equation ci-dessusconduit donc a deux equations vectorielles, la premiere exprimant la nullite de la somme desdeux resultantes des deux glisseurs, et la seconde la nullite du moment de ces deux glisseurs,par exemple au point A :
~Fc + M ~g = ~0−→AA ∧ ~Fc +
−→AG ∧M~g = ~0
c’est-a-dire :~Fc = −M~g et
−→AG ∧ ~g = ~0
En conclusion ~Fc est egale a l’oppose du poids M ~g et les points A et G sont sur la memeverticale. En effet, pour que le produit vectoriel
−→AG ∧ ~g soit nul, il est necessaire que le vecteur−→
AG soit parallele a ~g ou nul (voir Annexe). Notons enfin que : Fc = | ~Fc| = M g (Fig. 2.30b).
2.7.2 Exercice 2 : Seau et systeme de mouflage
On reprend le seau de l’exercice precedent, mais on modifie legerement le systeme de suspen-sion en adoptant un systeme de type mouflage simple. En d’autres termes, une courroie attacheea un bati est enroulee sur une poulie et est tenue par la main en A (Fig. 2.31).
On suppose la poulie et la courroie de masses negligeables devant celle du seau. Calculer lavaleur de l’effort Fc necessaire pour soulever le seau et le maintenir en equilibre.
~g~T ~Fc
BA
O
M ~g
seau
Fig. 2.31 – Seau et poulie
Corrige
Il s’agit d’appliquer le principe fondamental de la statique (paragraphe 2.2.2) a un systememateriel Σ. Ici le systeme Σ considere est « la poulie + le seau + le morceau de courroie AB »(Fig. 2.31).
Les efforts exterieurs exerces sur le systeme Σ sont :
1. la force de pesanteur appliquee en G, centre de gravite du seau,
2. la force ~Fc appliquee en A et verticale,

38 CHAPITRE 2. MECANIQUE DES STRUCTURES
3. la force ~T exercee en B par la courroie sur le systeme Σ. En effet au point B, la partie dela courroie situee au-dessus du point B exerce sur la partie de la courroie situee au-dessousde B, un effort de traction ~T diriges vers le haut. La quantite T = ‖~T‖ est la tension dansla courroie.
Le principe fondamental applique au systeme Σ conduit a :
{B, ~T}+ {A, ~Fc}+ {G, M ~g} = 0
Le premier membre est la somme de trois glisseurs. L’equation ci-dessus conduit donc a deuxequations vectorielles, la premiere exprimant la nullite de la somme des trois resultantes destrois glisseurs, et la seconde la nullite du moment de ces trois glisseurs par exemple au point O,ou O est le centre de la poulie. Il vient :
~T + ~Fc + M ~g = ~0−−→OB ∧ ~T +
−→OA ∧ ~Fc +
−−→OG ∧ (M ~g) = ~0
Pour la courroie, on admettra que la tension tout le long de la courroie est la meme ; les deuxforces ~T et ~Fc sont paralleles et dirigees vers le haut ; on a donc : ~T = ~Fc.
Comme ~T = ~Fc et−→OA +
−−→OB est un vecteur vertical, on a :
−−→OB ∧ ~T +
−→OA ∧ ~T = (
−−→OB +
−→OA) ∧ ~T = ~0
d’ou :
2 ~Fc = −M ~g et−−→OG ∧ (M ~g) = ~0
soit :~Fc = −(M/2)~g et
−−→OG ∧ ~g = ~0
En conclusion ~Fc est egale a l’oppose de la moitie du poids M ~g et les points O et G sont surla meme verticale. Remarquons que dans cet exercice, Fc = | ~Fc| = 1
2 M g : la force necessairepour soulever le seau a ete divisee par 2, par rapport a celle necessaire dans l’exercice 1.
2.7.3 Exercice 3 : Portique plan constitue de deux barres soudees
Dans cet exercice, nous allons etudier un systeme « plan » representatif d’un portique (Fig.2.32), constitue :
– d’un mur note 0, parallele a l’axe (O, z),– de deux barres OA et AB rectilignes, metalliques, de section faible et soudees en B.
Le systeme ABO est lie au mur avec un appui mobile en O et un appui fixe en A (voir leparagraphe 2.4.3).
Les vecteurs−→OA et
−−→OB valent respectivement h~z et h~y ou ~y et ~z sont les vecteurs unitaires
des deux axes (O, y) et (O, z). Les liaisons en A et en O sont supposees parfaites. Nous negligeronsl’action de la gravite sur la systeme ABO devant les autres efforts mis en jeu. L’objectif est decalculer les actions mecaniques en O et A (c’est-a-dire les efforts exerces par le systeme OABsur le mur) en fonction de ~F , sachant que ~F represente l’effort exterieur applique au systeme aupoint C tel que
−−→OC = d ~y (Fig. 2.32).
On dessinera ensuite les vecteurs modelisant les actions en O et A dans le cas d = L/4.

2.7. MECANIQUE DES STRUCTURES : EXERCICES AVEC CORRECTION 39
z
A
O B
C
F
y
(0)
Fig. 2.32 – Portique avec deux barres soudees
Corrige
Pour commencer analysons les differentes liaisons (voir paragraphe 2.4.2).– Appui fixe en A : les actions du mur 0 sur la barre sont schematisees par le glisseur {A, ~RA}
ou ~RA a deux composantes : ~RA = YA ~y + ZA ~z ;– Appui mobile en O : les actions du mur 0 sur la barre sont schematisees par le glisseur{O, ~RO} ou ~RO a une seule composante : ~RO = YO ~y.
Le systeme considere est constitue d’un seul solide a savoir le systeme ABO, que nous appelonsΣ. Le systeme Σ est soumis a trois forces schematisees par les trois glisseurs {A, YA ~y + ZA ~z},{O, YO ~y} et {C, ~F}.
Nous lui appliquons le principe fondamental de la statique.Il vient pour la resultante et le moment en O :
(YA ~y + ZA ~z) + YO ~y + ~F = ~0−→OA ∧ (YA ~y + ZA ~z) +
−−→OO ∧ (YO ~y) +
−−→OC ∧ ~F = ~0
Posons ~F = −F~z (sur la figure F est positif). Par ailleurs−→OA = h~z,
−−→OB = h~y et
−−→OC = d ~y.
Les deux equations precedentes conduisent a :
YA ~y + ZA ~z + YO ~y − F ~z = ~0−→OA ∧ (YA ~y + ZA ~z) +
−−→OO ∧ (YO ~y)−
−−→OC ∧ (F ~z) = ~0
La premiere equation conduit a :
YA + YO = 0 ; ZA − F = 0
et la seconde a :h~z ∧ (YA ~y + ZA ~z) + d ~y ∧ (F ~z) = ~0
h YA + d F = 0
ou l’on a utilise les egalites ~z ∧ ~y = −~y ∧ ~z et ~z ∧ ~z = ~0. En conclusion, il vient :
ZA = F ; YA = −d
hF ; YO =
d
hF

40 CHAPITRE 2. MECANIQUE DES STRUCTURES
Ainsi, nous avons determine les actions en O et A en fonction des donnees.Dans le cas ou d = L/4, on a (Fig. 2.33) :
ZA = F ; YA = −F/4 ; YO = F/4
z
A
O B
C
F
y
~RA
~RO
Fig. 2.33 – Efforts en A et O
2.7.4 Exercice 4 : Portique plan constitue de deux barres articulees
Nous allons etudier un systeme « plan » representatif d’un portique (Fig. 2.34), constitue :– d’un mur note 0, parallele a l’axe (O, z),– d’une premiere barre metallique de faible section, notee 1, en appui mobile sur le mur en
O,– d’une seconde barre metallique, de faible section, notee 2, en appui fixe sur le mur en A
et aussi en liaison pivot en B avec la barre 1. En fait au niveau de la liaison en B, onimagine que l’on a un petit solide sur lequel sont articulees les deux barres 1 et 2. Nousappellerons ce petit solide « nœud » (Fig. 2.35).
z
A
O B
1
2
F
y
(0)
Fig. 2.34 – Portique avec deux barres articulees

2.7. MECANIQUE DES STRUCTURES : EXERCICES AVEC CORRECTION 41
Les vecteurs−→OA et
−−→OB valent respectivement h~z et h~y, ou ~y et ~z sont les vecteurs unitaires
des deux axes (O, y) et (O, z). Toutes les liaisons sont supposees parfaites. Le tirant 2 et la barre1 etant de section faible, nous negligerons l’action de la gravite sur ces barres devant les autresefforts mis en jeu. L’objectif est de calculer les actions mecaniques en O, A et B en fonction de~F qui represente l’effort exterieur applique au systeme en B. Il faut imaginer que la force ~F estappliquee sur le nœud B (Fig. 2.35) et non sur les barres OB et AB.
On dessinera ensuite les vecteurs modelisant les actions en O, A et B.
tige 1
tige 2
nœud B
Fig. 2.35 – Nœud B
Corrige
Pour commencer analysons les differentes liaisons (voir paragraphe 2.4).– Appui fixe en A (paragraphe 2.4.3) : les actions du mur 0 sur la barre 2 sont schematisees
par un glisseur {A, ~RA} ou ~RA a deux composantes : ~RA = YA ~y + ZA ~z ;– Appui mobile en O : les actions du mur 0 sur la barre 1 sont schematisees par un glisseur{O, ~RO} ou ~RO a une seule composante : ~RO = YO ~y ;
– Liaison pivot en B : les actions de la barre 1 sur le nœud B sont schematisees par unglisseur {B, ~R1B} ou ~R1B a deux composantes : ~R1B = Y1B ~y+Z1B ~z. Les actions de la barre2 sur le nœud B sont schematisees par un glisseur {B, ~R2B} ou ~R2B a deux composantes :~R2B = Y2B ~y + Z2B ~z.
L’objectif de l’exercice est de determiner les efforts de liaison, c’est-a-dire YA, ZA, YO, Y1B, Z1B,Y2B et Z2B en fonction des donnees.
Le systeme considere est constitue de trois corps solides : la barre 1, la barre 2 et le nœudB. Nous allons applique trois fois le principe fondamental. Une fois au systeme complet « barre1 + barre 2 + nœud B », une fois au « nœud B » seul et une fois a la « barre 2 » seule.
Remarque : on aurait pu choisir trois autres systemes, comme par exemple : « (barre 1 +barre 2 + nœud B) », « (barre 1 + nœud B) » et « (barre 2 + nœud B) », ou bien encore :« (barre 1, barre 2 et nœud B) ».
On notera, qu’en general, lorsqu’on a un systeme materiel constitue de n solides, la loifondamentale de la statique appliquee n fois a n sous-systemes independants, donne le maximumd’information.
1) Principe fondamental applique aux deux barres 1 et 2 et au nœud B : ce systeme estsoumis a trois forces schematisees par les trois glisseurs {A, YA ~y + ZA ~z}, {O, YO ~y} et{B, ~F}. Remarquons bien que les actions des barres sur le nœud B et du nœud B sur les

42 CHAPITRE 2. MECANIQUE DES STRUCTURES
z
A
O B
F
y
~RA
~RO~R1B
~R2B
Fig. 2.36 – Efforts en A, O et B
barres ne sont pas des efforts exterieurs au systeme considere ici. On a :
{A, YA ~y + ZA ~z}+ {O, YO ~y}+ {B, ~F} = 0
d’ou :(YA ~y + ZA ~z) + YO ~y + ~F = ~0
−→OA ∧ (YA ~y + ZA~z) +
−−→OO ∧ (YO ~y) +
−−→OB ∧ ~F = 0
en ecrivant que le moment en O des trois glisseurs est nul.Posons ~F = −F ~z (sur la figure F est positif).Les deux equations relatives a la resultante et au moment en O conduisent a :
YA + YO = 0 , ZA − F = 0 et h YA + h F = 0
ou l’on a utilise, dans l’equation pour le moment, les egalites ~z ∧ ~z = ~0 et ~z ∧ ~y = −~y ∧ ~z.Il vient :
ZA = F ; YA = −F ; YO = F (S4.1)
2) Principe fondamental applique au nœud B. Le nœud B est soumis a trois forces schema-tisees par les trois glisseurs {B, Y1B ~y + Z1B ~z}, {B, Y2B ~y + Z2B ~z} et {B, ~F}. D’ou :
(Y1B ~y + Z1B ~z) + (Y2B ~y + Z2B ~z) + ~F = 0
Remarquons que l’equation relative au moment en B est trivialement verifiee.
Y1B + Y2B = 0 ; Z1B + Z2B − F = 0 (S4.2)
3) Principe fondamental applique a la barre 2 : ce systeme est soumis a deux forces schema-tisees par les deux glisseurs {A, YA ~y + ZA ~z} et {B,−Y2 ~y − Z2B ~z}. Remarquons que l’ona applique le theoreme de l’action et de la reaction (paragraphe 2.2) entre la barre 2 et lenœud B.Il vient pour la resultante et le moment en B :
(YA ~y + ZA ~z)− (Y2B ~y + Z2B ~z) = 0−−→BA ∧ (YA ~y + ZA ~z) +
−−→BB ∧ (−Y2B ~y − Z2B ~z) = 0
soit :YA = Y2B ; ZA = Z2B ; YA + ZA = 0 (S4.3)

2.7. MECANIQUE DES STRUCTURES : EXERCICES AVEC CORRECTION 43
En conclusion, les equations (S4.1), (S4.2) et (S4.3) conduisent a :
YA = −F , ZA = F , YO = F , Y2B = −F , Z2B = F , Y1B = F , Z1B = 0
Ces efforts sont representes sur la figure 2.36.L’etudiant peut reprendre cet exercice en considerant les trois systemes « (barre 1 + barre
2 + nœud B) », « (barre 1) » et « (barre 2) » et constater que le resultat final est inchange.
2.7.5 Exercice 5 : Loi de l’elasticite lineaire de Hooke appliquee a un poteauen compression
Calculer la contrainte σ dans un poteau vertical en compression (Fig. 2.37). On neglige lepoids de ce poteau et on imagine qu’il supporte le poids ~F = −F ~z d’un batiment.
Calculer le retrecissement du poteau, sachant que F = 2 105 N, que la section S du poteauest constante et egale a 0.5 m2, que le module d’Young du beton E vaut 3 104 MPa et que lahauteur du poteau est h = 15 m.
zF
O
poteau
sol
Fig. 2.37 – Poteau en compression
Corrige
D’apres la loi de Hooke (paragraphe 2.5.2, formule (2.6)), on a : σ = E ε ou ε est l’allongementrelatif (ou deformation). Par ailleurs, σ = F/S (paragraphe 2.5.1).
Il vient : σ = E ε = F/S, soit : ε = F/(E S).Avec les donnees numeriques, on trouve : ε = 2 105/(3 1010)× 0.5 = (4/3) 10−5.Enfin le retrecissement du poteau est : ε h = (4/3) 10−5 × 15 = 20 10−5 m = 0.2 mm.
2.7.6 Exercice 6 : Trombone en traction
Peut-on se suspendre dans le vide a un trombone en acier ? La masse de l’individu considereest 60 kg et l’acceleration de la pesanteur est prise egale a 10 m.s−2. La limite d’elasticitede l’acier a la traction est de l’ordre de 1000 MPa (par limite d’elasticite il faut comprendre lavaleur la plus grande que l’on peut donner a la contrainte σ tout en conservant un comportementd’elasticite lineaire pour le materiau considere). On assimile le trombone a un petit fil metalliquede section S = 1 mm2.

44 CHAPITRE 2. MECANIQUE DES STRUCTURES
Corrige
On a : σ = F/S (paragraphe 2.5.1). Avec les donnees numeriques, on trouve σ = 600/10−6 Pasoit σ = 6 108 Pa = 600 MPa. Cette valeur est inferieure a la valeur donnee pour la limited’elasticite de l’acier. On peut donc se suspendre a un trombone. Naturellement, la reponse nesera pas la meme pour un individu de 120 kg !Remarque : 1 MPa = 106 Pa, 1 atmosphere ≈ 105 Pa = 0.1 MPa.
2.7.7 Exercice 7 : Poteau en compression de section droite non constante
On cherche a determiner la surface S(z) de la section droite du poteau de la figure 2.38 detelle sorte que la contrainte soit constante et egale a σ0 le long du poteau avec σ0 = 50 N/cm2.
Le poteau est de revolution avec pour axe, l’axe (O, z) vertical. A la hauteur z, la sectiondroite est un cercle d’aire S(z) (fig. 38). Le materiau constituant le poteau est du beton.
La masse volumique du beton est constante et vaut ρ = 2300 kg.m−3. Le poteau supportele poids ~F = −F ~z d’un batiment. Le poids F est F = 2 105 N et la hauteur du poteau esth = 15 m.
Determiner S(z).
z
O
F
z = h
z = 0
���)S(z)
���)S(z0)
sol
Fig. 2.38 – Poteau de section droite non constante
Corrige
L’axe Oz vertical ascendant est tel que la base du poteau soit en z = 0. Soit une section droiteS(z0). Au niveau de cette section, cherchons les efforts exerces par la partie superieure sur lapartie inferieure. Ce sont : la force ~F = −F ~z et le poids de la partie du poteau situee entrez = z0 et z = h. Ce poids est
ρ g
∫ h
z0
S(z) dz
Il faut remarquer que l’integrale est le volume de la partie du poteau situee au-dessus de lasurface S(z0). Les efforts exerces par la partie au-dessus de S(z0) sur la partie en dessous de

2.7. MECANIQUE DES STRUCTURES : EXERCICES AVEC CORRECTION 45
S(z0) est donc : [−F − ρ g
∫ h
z0
S(z) dz
]~z (S6.1)
D’apres la definition des contraintes (paragraphe 2.5.1), et sachant que la contrainte doitetre egale a σ0, les efforts exerces par la partie au-dessus de S(z0) sur la partie en dessous deS(z0) est σ0 S(z0)(−~z). En egalant cette expression avec (S6.1), on a :
F + ρ g
∫ h
z0
S(z) dz = σ0 S(z0) (S6.2)
F − ρ g
∫ z0
hS(z) dz = σ0 S(z0)
Derivons cette derniere egalite par rapport a z0. Il vient :
−ρ g S(z0) = σ0 S′(z0)
(On a derive l’integrale par rapport a sa borne superieure). L’equation ci-dessus est vraie pourtout z0. On remplace z0 par z et on a :
S′(z)S(z)
= −ρ g
σ0
ln(S(z)) = −ρ g z
σ0+ K
sachant que S(z) est positif et ou K est une constante d’integration. En z = h, S(z) = S(h),d’ou : ln(S(h)) = −(ρ g h/σ0) + K. Par suite :
ln(S(z))− ln(S(h)) = −ρ g z
σ0+
ρ g h
σ0=
ρ g
σ0(h− z) (S6.3)
Remarquons que (S6.2) conduit a F = σ0 S(h) en prenant z0 = h. Donc S(h) = F/σ0. Finale-ment :
ln(S(z)) = lnF
σ0+
ρ g
σ0(h− z)
S(z) =F
σ0exp
(ρ g
σ0(h− z)
)(S6.4)
Avec les donnees numeriques :
S(z) =2 105
50 104exp
(2300× 10
50 104(h− z)
)= 0.4 exp(0.046 (h− z)) = 0.4 exp(0.046 (15− z))
ou z est exprime en metres. En particulier :
S(0) = 0.8 m2 ; S(h) = 0.4 m2
S(z) decroıt quand z croıt (ce qui est intuitivement correct).
2.7.8 Exercice 8 : Trave de pont
En sachant que le coefficient de dilatation thermique d’un acier est 11 10−6 K−1, et celui dubeton entre entre 9 et 12 10−6 K−1, calculer la variation de longueur d’une travee de pont enbeton arme de 50 m de longueur pour une variation de temperature de 40 K.

46 CHAPITRE 2. MECANIQUE DES STRUCTURES
Corrige
On constate que les coefficients de dilatation thermique des deux materiaux sont proches. Doncle melange des materiaux est possible sans souci au niveau des dilatations des deux materiaux.On retient comme coefficient de dilatation thermique moyen la valeur : α = 10−5 K−1. Donc∆` = `0 α ∆T ou `0 est la longueur de la trave du pont (paragraphe 2.6). On trouve : ∆` =50 × 10−5 × 40 = 2 × 10−2 m = 2 cm. Ceci impose la pose de joints de dilatation observablessur les ponts.
2.7.9 Exercice 9 : Balustrade en acier
Soit une balustrade en acier de 10 m de longueur encastree aux extremites dans des mursen beton (supposes indeformables). Le coefficient de dilatation de l’acier est 10−5 K−1, et sonmodule de Young est 2 105 MPa. Calculer l’allongement de la balustrade, sa deformation etla contrainte exercee par la balustrade sur le mur pour une variation de temperature de 50 K(variation de temperature entre l’ete et l’hiver). Expliquer pourquoi le beton se fissure.
Corrige
L’allongement de la balustrade est (paragraphe 2.6) :
∆` = `0 α ∆T = 10× 10−5 × 50 = 5 10−3 m = 5 mm
Cet allongement correspond, pour la balustrade libre en ses deux extremites, a une deformation(ou dilatation thermique relative) de :
ε =∆`
`0=
5 10−3 m10 m
= 5 10−4
Si la balustrade est encastree dans les deux murs, la deformation doit etre nulle (les deplacementsdes deux extremites de la balustrade sont impossibles et la balustrade ne peut que conserver salongueur). Donc on aura des contraintes de compression dans la balustrade. Pour les calculer,on suppose que la barre s’allonge de ∆` et qu’on la comprime pour annuler la deformationcorrespondant a cet allongement. On applique la loi de Hooke. La contrainte de compressiondans la balustrade vaut donc :
σ = E ε = (2 105 MPa)× 5 10−4 = 2 1011 × 5 10−4 Pa = 108 Pa = 100 MPa
On suppose que la contrainte dans le mur – au niveau de la jonction avec la balustrade – estidentique et vaut 100 MPa. Cette valeur est largement superieure a ce que supporte un betonclassique en compression, laquelle est de l’ordre de 50 MPa. Donc le mur se fissure.

Chapitre 3
Mecanique du vol
D’apres des notes de cours de D. Euvrard, Universite Pierre et Marie Curie et ENSTA
Quelques domaines industriels particulierement porteurs et innovants ont fait progresser lessciences en general, et les sciences mecaniques en particulier. Ainsi en est-il de l’aeronautique,de l’espace, de l’armement, du nucleaire, . . .
S’agissant de l’aeronautique, la demande scientifique et technique a ete forte des le depart :en effet, si les hommes ont construit des bateaux depuis la prehistoire (il est relativement facilede faire flotter tant bien que mal une « coquille de noix » !), il a fallu passer un seuil tech-nologique pour reussir a s’elever dans l’atmosphere, dans un appareil plus leger que l’air (lesmontgolfieres a la fin du 18e siecle) et a plus forte raison dans un appareil plus lourd que l’air(les premiers avions au debut du 20e siecle). Des considerations de prestige d’abord, relayees pardes considerations militaires et economiques ensuite, ont suscite recherche scientifique et progrestechnique. Les retombees de ces etudes ont ensuite fait progresser d’autres domaines industriels :aerodynamique, moteurs, calcul des structures, radio-navigation, radio-communication, . . . Cen’est d’ailleurs pas fini, puisque par exemple les constructeurs aeronautiques se situent main-tenant a la pointe de la simulation numerique, de la conception assistee par ordinateur, dutraitement d’images, . . .
C’est ainsi que l’aerodynamique est devenue une science tres sophistiquee, dont nous allonsdonner un petit apercu, au travers de ce chapitre intitule « Mecanique du vol » (d’apres desnotes de cours de Daniel Euvrard, Universite Pierre et Marie Curie (Paris 6) et ENSTA).
3.1 Generalites sur les profils d’ailes
Les ailes des avions sont de formes tres variables. Elles ont aussi beaucoup evolue au coursdu siecle dernier. On peut s’en convaincre en examinant des photos d’avions sur le site :
http://avions.legendaires.free.fr/accueil.php
Un avion est grossierement constitue par un fuselage et deux ailes placees symetriquement(Fig. 3.1). Dans ce cours, on schematisera l’aile de l’avion par une surface cylindrique de grandelongueur.
Un avion reel est naturellement beaucoup plus complexe. Nous mettons a titre illustratif, laphoto d’un AIRBUS A 340 (Fig. 3.2). Les caracteristiques de cet avion sont les suivantes (voir :http://fr.wikipedia.org/wiki/Airbus) :
Envergure : 63,45 m ; Longueur : 75,30 m ; Hauteur : 17,30 m ; Aire des ailes : 439,40 m2
Masse a vide : 177 800 kg ; Masse maximale au decollage : 368 000 kg ;Vitesse de croisiere : environ 888 km/h ; Vitesse maximale : environ 913 km/h ;Altitude de croisiere : environ 13 000 m ;
47

48 CHAPITRE 3. MECANIQUE DU VOL
-fuselage?
aile
aile
Fig. 3.1 – Fuselage et ailes d’un avion
Fig. 3.2 – Airbus A 340-600 au salon de Berlin 2006
Motorisation : reacteur RR Trent 500M56-5C4 de 15 400 kg ; Poussee : 249 kN.
3.1.1 Qu’est ce qu’un profil d’aile ?
Considerons une aile modelisee par une surface cylindrique comme representee sur la figure3.3. La section de l’aile par un plan parallele au plan de symetrie de l’avion definit un profild’aile (Fig. 3.4).
���bord de fuite
���
bord d’attaque HHHY
profil
~Vair/avionA
F
Fig. 3.3 – Allure d’une aile
��
extrados
@@I
intrados
AF
Fig. 3.4 – Profil d’une aile
Quelques definitions
On se place generalement dans un repere lie a l’avion. Autrement dit, l’avion et aussi l’ailesont immobiles et l’ecoulement de l’air se fait autour de l’avion. Notons que c’est la configu-ration que l’on a dans les souffleries experimentales lorsqu’on fait des essais pour etudier lesperformances d’une aile.

3.1. GENERALITES SUR LES PROFILS D’AILES 49
Examinons la figure 3.4.La pointe arriere du profil est notee F : c’est le bord de fuite.
Le point du profil, situe a l’avant de celui-ci, ou la courbure du profil est maximale est noteeA : c’est le bord d’attaque.
Le dessous du profil est l’intrados.Le dessus du profil est l’extrados.Le segment AF est appele la corde du profil.Le maıtre-couple est la plus grande epaisseur perpendiculairement a la corde.On appelle epaisseur relative du profil le rapport maıtre-couple/corde. Les avions subsoniques
ont en general leur maıtre-couple a 30% de la corde a partir du bord d’attaque.La ligne moyenne du profil est la ligne qui est a egale distance des deux lignes de l’intrados
et de l’extrados. Cette ligne definit la cambrure de l’aile.Notons que tous les profils d’aile ont un bord d’attaque arrondi et un bord de fuite pointu.
Tous ont un extrados arrondi et la plupart ont un intrados assez plat.
3.1.2 Vitesse propre de l’avion. Vitesse de l’avion par rapport au sol. Inci-dence
Considerons l’avion en vol a la vitesse constante ~Vavion/sol par rapport au sol et dans uneatmosphere en mouvement par rapport au sol (vent) avec une vitesse constante ~Vair/sol. Ce quiimporte pour l’aerodynamique, c’est la vitesse de l’avion par rapport a l’air qui l’environne notee~Vavion/air. Sur la figure 3.3, on a indique la vitesse de l’air par rapport a l’avion noyee ~Vair/avion.Naturellement on a ~Vair/avion = −~Vavion/air.
On a :~Vavion/air = ~Vavion/sol − ~Vair/sol
~Vavion/sol = ~Vavion/air + ~Vair/sol
Considerons la figure 3.5, ou les trois vitesses ~Vavion/sol, ~Vavion/air et~Vair/sol ont la memedirection. Il est clair que si le vecteur ~Vair/sol est dans le meme sens que la vitesse ~Vavion/sol, lavitesse ~Vavion/sol est plus importante que la vitesse ~Vavion/air (Fig. 3.5a). Inversement, si le vecteur~Vair/sol est dans le sens contraire de la vitesse ~Vavion/sol, la vitesse ~Vavion/sol est plus faible que lavitesse ~Vavion/air (Fig. 3.5b). Pour la meme vitesse ~Vavion/air (c’est-a-dire la meme consommationde kerosene), l’avion parcourra une distance au sol plus grande dans le cas a) que dans le casb).
~Vair/sol~Vair/sol
~Vavion/air~Vavion/air
~Vavion/sol~Vavion/sol
sol sol(a) (b)
Fig. 3.5 – Les differentes vitesses

50 CHAPITRE 3. MECANIQUE DU VOL
En conclusion, pour la distance parcourue c’est ~Vavion/sol qui compte. Pour l’aerodynamique(comme on le verra dans la suite de ce cours), c’est ~Vavion/air qui compte.
Notations
On pose :~Vavion/air = ~Vp (vitesse propre de l’avion).~Vair/avion = ~V∞ (vitesse de l’air par rapport a l’avion).~Vavion/sol = ~VS (vitesse de l’avion par rapport au sol).
Dans ce qui suit, l’ecoulement de l’air arrivant sur le profil est suppose stationnaire (end’autres termes, la vitesse ~Vp est independante du temps) et uniforme (c’est-a-dire que la vitesse~Vp ne depend pas de l’espace). Autrement dit, la vitesse ~Vp est supposee constante. On dit quel’ecoulement est etabli. Si de plus, on suppose la vitesse ~Vair/sol constante et si on revient au volde l’avion par rapport au sol, ceci signifie que l’avion vole avec une vitesse ~VS constante.
AF
V∞
(a) incidence nulle
A
A
F
F
V∞ V∞α
α
(b) incidence positive (c) incidence negative
Fig. 3.6 – Angles d’incidence
Placons nous dans un repere lie a l’avion (Fig. 3.6). Loin devant le profil, en amont, la vitessede l’air par rapport a l’avion est ~V∞ : on parle du vent a l’infini. On a ~V∞ = ~Vair/avion. Ce vecteur~V∞ fait un angle α avec la corde AF . Cet angle α est appele angle d’incidence ou plus brievementincidence. Si ~V∞ est parallele a la corde AF , l’incidence est nulle (Fig. 3.6a). Si ~V∞ pointe versl’intrados, l’incidence est dite positive (Fig. 3.6b). Enfin si ~V∞ pointe vers l’extrados, l’incidenceest dite negative (Fig. 3.6c).
La direction du vecteur ~V∞ indique la direction de la trajectoire de l’avion par rapport al’air. Il faut bien noter que la trajectoire n’est pas forcement horizontale (avion en montee ou endescente par exemple). Remarquons enfin qu’en vol de croisiere, la trajectoire est generalementhorizontale et l’angle d’incidence positif (ceci est represente sur la figure 3.6b, si on suppose~V∞ = horizontale.
3.1.3 Ecoulement autour d’un profil et distribution des pressions
Un peu d’observationPlacons nous dans la veine d’essai d’une soufflerie de laboratoire schematisee sur les figures
3.7a et 3.7b. Un ecoulement uniforme de vitesse ~V∞ a lieu autour d’un profil d’aile maintenuimmobile. Le profil est choisi biconvexe et symetrique par rapport a la corde AF , cale successive-ment en a) a l’incidence α = 0◦ et en b) a l’incidence α = 10◦. Dans le premier cas, l’ecoulementest symetrique, et dans le second cas, l’ecoulement est clairement dissymetrique. Visualisonsl’ecoulement en faisant apparaıtre les trajectoires suivies par les « particules fluides » (qui

3.1. GENERALITES SUR LES PROFILS D’AILES 51
coıncident ici avec les lignes de courant definies comme les lignes tangentes aux vecteurs vitessesen chaque point de l’ecoulement). Dans le cas a) (Fig. 3.7a) ces trajectoires sont symetriquespar rapport a l’axe portant la corde AF . Dans le cas b) (Fig. 3.7b) ces trajectoires ne sont plussymetriques par rapport a la droite portant la corde AF .
veine d’essai
veine d’essai
V∞
V∞
p∞
p∞
A
A
F
F
p− p∞ < 0
p− p∞ < 0
p− p∞ < 0
p− p∞ > 0
(a)
(b)
Fig. 3.7 – (a) Ecoulement autour d’un profil symetrique sans incidence. (b) Ecoulement autourd’un profil symetrique avec une incidence positive
Mesurons la pression p en chaque point du contour du profil : on obtient ainsi la distri-bution des pressions sur le profil. Toujours en chaque point du contour du profil on considerela difference entre cette pression et la pression de l’ecoulement uniforme a l’infini que noussupposons constante et egale a p∞.
Si la difference p−p∞ est positive on dit qu’on a une surpression au point du profil considere,si cette difference est negative on dit qu’on a une depression au point du profil considere.
En chaque point du profil on dessine un vecteur normal au profil et de norme egale a |p−p∞|.De plus ce vecteur est oriente vers l’exterieur du profil (fleche s’eloignant du profil) dans le casd’une depression (p − p∞ est negatif) et vers l’interieur du profil (fleche dirigee vers le profil)dans le cas d’une surpression (p− p∞ est positif).
On observe dans le cas a) du profil en incidence nulle, qu’il y a une depression sur l’extradoset aussi sur l’intrados, et qu’en deux points symetriques ces depressions sont egales (Fig. 3.7a).Dans le cas b) la situation est differente : l’incidence est positive ; il y a une depression surl’extrados et une surpression sur l’intrados (Fig. 3.7b) ; de plus la surpression est moderee surl’intrados et la depression est forte sur l’extrados.
ExplicationsDans tout ce cours, l’air est suppose de masse volumique ρ constante (on rappelle que la
masse volumique est la masse de l’unite de volume). De plus, l’ecoulement autour de l’aile estsuppose stationnaire (on dit aussi permanent). Enfin l’air est suppose parfait, c’est-a-dire sansviscosite : il n’y a pas de frottement visqueux (frottement du a la viscosite) le long du profil. Deuxphenomenes physiques vont permettre d’expliquer l’origine de la surpression et de la depression.
a) Conservation de la masseReprenons la soufflerie et la veine d’essai (Fig. 3.8). Les lignes de courant ou trajectoires des
particules fluides sont quasi-rectilignes loin du profil (c’est-a-dire pres des parois de la veine).

52 CHAPITRE 3. MECANIQUE DU VOL
Placons nous au-dessus du profil pres du point d’attaque A : il y a une zone retrecie entre ceslignes de courant rectilignes et l’extrados. La conservation de la masse impose donc a la vitessed’etre plus grande dans cette zone. En effet, la meme quantite d’air doit s’ecouler dans une zoneplus etroite.
De la meme facon, au-dessous du profil, il y a une zone elargie. La conservation de la masseimpose donc a la vitesse d’etre plus petite dans cette zone.
veine d’essai
veine d’essai
zone retrecie
zone retrecie
zone elargie
zone elargie
A
A
F
F
V∞ p∞
V∞ p∞
Fig. 3.8 – Profil d’aile dans une soufflerie
b) Theoreme de BernoulliLe mathematicien et physicien suisse Daniel Bernoulli a formule en 1738 le « principe »
qui porte son nom. A une vitesse maximale correspond une pression minimale. De maniere unpeu plus precise, on dit que pour un fluide de masse volumique ρ constante, en ecoulementstationnaire dans le champ de la pesanteur, on a :
12
ρ ~V 2 + p + ρ g z = constante le long de chaque trajectoire
ou ~V et p sont le vecteur vitesse et la pression au point considere, g l’acceleration de la pesan-teur et z l’altitude du point considere. Ce theoreme (non demontre dans ce cours) traduit laconservation de l’energie par unite de volume le long de la trajectoire (energie cinetique, energieinterne exprimee en terme de pression, energie potentielle de la pesanteur).
Ces deux phenomenes (conservation de la masse et theoreme de Bernoulli) expliquent la fortedepression a l’extrados, et la surpression a l’intrados dans le cas d’une aile en incidence negativeou positive comme sur la figure 3.8. En effet, maintenons l’altitude z constante. Nous venonsde voir, avec la conservation de la masse, que la vitesse augmente a l’extrados, donc d’apres letheoreme de Bernoulli la pression diminue, d’ou une depression a l’extrados. De meme, la vitessediminue a l’intrados, donc la pression augmente, d’ou une surpression a l’intrados.
c) Quelques remarquesJusqu’a present, dans tous les raisonnements que nous avons faits, nous avons suppose que
l’ecoulement de l’air suit la paroi du profil. C’est le fameux « effet Coanda » decouvert par ha-sard par l’ingenieur aerodynamicien Henri Coanda (1886–1972). L’effet Coanda, a proprementparler, se presente de la maniere suivante : lorsqu’un fluide (gaz ou liquide) sort d’un recipientpar un orifice ou un petit tube, une partie de ce fluide a tendance, au moment ou il emerge,

3.1. GENERALITES SUR LES PROFILS D’AILES 53
a epouser le contour exterieur du recipient, meme s’il lui faut pour cela, faire un « virage enepingle a cheveux ». L’exemple le plus courant de l’effet Coanda est la facon malencontreusedont le the s’ecoule d’une theiere lorsqu’on n’incline pas assez le bec verseur ; le the sort bien dela theiere, mais le jet adhere a la paroi exterieure pour s’egoutter finalement ailleurs que dansla tasse ou il etait cense arriver.
L’existence de ce phenomene depend etroitement de quelques parametres cruciaux, parmilesquels on peut citer la vitesse d’ecoulement du jet, l’intensite de son debit et le profil exact del’ajutage de sortie. Autrement dit, lorsque l’effet Coanda se manifeste a la sortie d’une theiere,il suffit d’augmenter le debit du the pour faire cesser le phenomene. L’effet Coanda peut avoirdes consequences benefiques dans certaines circonstances, en particulier en aerodynamique, ouil peut donner lieu a des effets tres importants en raison d’un phenomene d’entraınement exercesur l’air environnant.
Mais il ne faut pas trop lui en demander : autant il est facile, pour le fluide, de suivre la paroidu profil dans la zone retrecie en amont du profil (pres du bord d’attaque), autant a l’arriere del’extrados, il y a un risque de decollement (voir paragraphe 3.1.5) et on doit moderer la pente.
3.1.4 Effets de viscosite et couche limite
Lorsqu’un fluide reel (c’est-a-dire tres peu visqueux, mais visqueux quand meme) s’ecoule lelong d’une paroi, on doit distinguer grosso modo deux zones (Fig. 3.9 et Fig. 3.10) : une zonede fluide parfait et une zone de fluide visqueux.
Les lignes blanches representent lestrajectoires des particules de fluide.
Fig. 3.9 – Visualisation d’un ecoulement autour d’un profil
a) Zone de fluide parfaitDans tout l’ecoulement, excepte le voisinage immediat de la paroi (disons dans 99% de
l’ecoulement), le fluide peut etre considere comme parfait, c’est-a-dire sans viscosite.
b) Zone de couche limiteDans une couche mince le long de la paroi, (de l’ordre de quelques milimetres d’epaisseur
le long de la paroi d’un profil d’aile), les effets dus a la viscosite sont dominants. Il s’agit d’unecoulement de cisaillement, avec une forte variation de la vitesse dans la direction perpendiculairea la paroi (Fig. 3.10). Cette couche mince est appelee couche limite. En general, dans la partieamont de l’aile (Fig. 3.9), la couche limite correspond a un ecoulement laminaire par filets defluide paralleles et stationnaires. Plus en aval, apres une zone de transition agitee de mouvementsde forte amplitude, la couche limite devient turbulente avec une vitesse variant avec le temps etle lieu de facon aleatoire (Fig. 3.9, voir aussi la figure 3.11).

54 CHAPITRE 3. MECANIQUE DU VOL
norm
ale
ala
paro
i
?
paroi
?
vitesse du fluide
zone defluide parfait
zone defluide visqueux
couchelimite
Fig. 3.10 – Ecoulement de cisaillement et couche limite
3.1.5 Le decollement de la couche limite et le decrochage de l’aile
(a) L’ecoulement dufluide suit le profil.
(b) Decollement dela couche limite
(c) Le phenomene dedecrochage
Fig. 3.11 – Decollement de la couche limite
Considerons l’ecoulement autour du profil d’aile de la figure 3.11a. L’ecoulement suit le profila l’extrados. Si nous augmentons l’angle d’incidence (Fig. 3.11b et 11-c), la deflexion des lignesde courant par le profil augmente : la surpression a l’intrados augmente et surtout la depressiona l’extrados se creuse de sorte que la portance (voir le paragraphe 3.2 ci-apres) augmente. Toutceci reste correct, tant que l’angle d’incidence ne depasse pas une valeur voisine de 15◦ a 20◦
(Fig. 3.11a et 3.11b). Si on augmente encore l’incidence, tous ces phenomenes plafonnent et,tout a coup, la depression a l’extrados disparaıt et la portance s’annule (Fig. 3.11c). C’est cephenomene que l’on appelle decrochage aerodynamique.
Si on visualise les lignes de courant, on observe qu’au decrochage aerodynamique du profilcorrespond un decollement de la couche limite a l’extrados avec apparition d’une zone dite de« recirculation » tourbillonnaire (Fig. 3.11c). Il va de soi que le phenomene de decrochage nesera pas sans consequence pour le pilotage d’un avion.

3.2. ANALYSE QUANTITATIVE : PORTANCE ET TRAINEE 55
3.2 Analyse quantitative : portance et traınee
3.2.1 Definitions et premieres remarques
Efforts aerodynamiques exerces sur l’aileLa resultante des efforts, dits aerodynamiques, exerces par l’air sur l’aile est notee ~R. Par
definition, cette resultante se decompose en deux (Fig. 3.12) :
~R = ~T + ~P
- une traınee ~T (ou resistance a l’avancement), qui s’oppose au mouvement du profil parrapport a l’air et qui est donc nuisible. La traınee ~T est parallele a la trajectoire de l’avion. Lemodule de ~T est note T . Rappelons que la trajectoire est parallele a la vitesse de l’ecoulement.
- une portance ~P perpendiculaire a la trajectoire et dirigee « vers le haut » ; cette portanceest evidemment utile. Le module de ~P est note P .
Le rapport P/T s’appelle la finesse de l’aile. Elle vaut en general plusieurs unites.Remarquons que la figure 3.12 est faite dans un repere lie a l’aile. La vitesse V est la vitesse
de l’air par rapport a l’avion.
portance resultante
traıneeV
Fig. 3.12 – Efforts aerodynamiquessur une aile
portance
traınee
poids
trajectoire
traction
Fig. 3.13 – Efforts exerces sur l’avioncomplet en vol horizontal
Efforts aerodynamiques exerces sur l’avion completPour l’avion complet, la resultante des efforts aerodynamiques exerces par l’air sur l’avion
est aussi notee ~R. Comme pour l’aile on pose : ~R = ~T + ~P ou la portance ~P est perpendiculaire ala trajectoire de l’avion et dirigee « vers le haut », et ou la traınee ~T est parallele a sa trajectoire.
Pour l’avion complet en vol horizontal, la portance ~P s’oppose au poids m~g de l’avion, et latraction ~F de l’helice s’oppose a la traınee ~T (Fig. 3.13).
Analysons maintenant, du point de vue des forces, les variations de l’incidence (figures 3.14a 3.22). Dans les figures 3.16, 3.19 et 3.22, la traınee a ete dilatee relativement a la portance,afin d’en faciliter la lecture mais, en fait, elle est tres faible. La vitesse V indiquee sur les figures3.15, 3.18 et 3.20 est la vitesse de l’air par rapport a l’aile de l’avion.
Examinons les trois figures 3.14, 3.15 et 3.16. L’aile a une faible incidence (Fig. 3.14). Lesdepression et surpression sur l’aile sont indiquees sur la figure 3.15 ; la resultante de tous lespetits vecteurs, c’est-a-dire l’addition de tous les petits vecteurs, correspond a la somme de laportance et de la traınee. On a ~R = ~T + ~P (traınee plus portance) comme indique sur la figure3.16.
Examinons les trois figures 3.17, 3.18 et 3.19. Sur la figure 3.17, l’aile a une incidence moyennepositive. Les depression et surpression sur l’aile sont importantes (Fig. 3.18) et egalement laportance (Fig. 3.19). Depression, surpression et portance sont plus importantes que dans le casprecedent represente sur les figures 3.15 et 3.16.

56 CHAPITRE 3. MECANIQUE DU VOL
Sur la figure 3.20, l’aile a une forte incidence et il y a le phenomene de decrochage. Ladepression est fortement diminuee, et la portance « chute » (Fig. 3.21 et Fig. 3.22).
Fig. 3.14 – Aile sous faibleincidence
surpression
depressionV
Fig. 3.15 – Depression etsurpression
traınee
port
ance
Fig. 3.16 – Portance ettraınee
Fig. 3.17 – Aile sous inci-dence moyenne
surpression
depressionV
Fig. 3.18 – Depression etsurpression
traıneepo
rtan
ce
Fig. 3.19 – Portance ettraınee
V
Fig. 3.20 – Aile sous forteincidence
surpression
depression
Fig. 3.21 – Depression etsurpression
traınee
portance
Fig. 3.22 – Portance ettraınee

3.2. ANALYSE QUANTITATIVE : PORTANCE ET TRAINEE 57
3.2.2 Coefficient de portance et coefficient de traınee
On raisonne ici avec un fluide parfait (c’est-a-dire sans viscosite), de masse volumique ρconstante, en ecoulement stationnaire ou permanent (c’est-a-dire independant du temps), etaussi en ecoulement irrotationnel (c’est-a-dire sans tourbillons internes).
D’apres le Theoreme de Bernoulli deja evoque dans le paragraphe 3.1.3, la vitesse du fluideaugmente lorsque la pression diminue. Enoncons ici de maniere precise ce theoreme.
Theoreme 3.1 (Theoreme de Bernoulli) Pour un fluide parfait, de masse volumique cons-tante ρ, en ecoulement stationnaire et irrotationnel, et en negligeant les forces de pesanteurau sein du fluide, on a : p(M) + 1
2 ρ V 2(M) = constante le long de chaque trajectoire d’uneparticule de fluide (et aussi le long de chaque ligne de courant), ou M est le point courant surla trajectoire, ou p(M) est la pression au point M , et V (M) le module de la vitesse en ce memepoint M .
ligne de courant
V∞
p∞
A
F
~n
Fig. 3.23 – Ecoulement autour d’un profil d’aile
Si a l’infini amont, la pression est p∞ constante et la vitesse ~V∞ constante, on a :
p(M) +12
ρ V 2(M) = p∞ +12
ρ V 2∞ (3.1)
ou V∞ est le module de la vitesse ~V∞ a l’infini amont. Il est a noter que ~V∞ est la vitesse del’air par rapport a l’aile ou l’avion (Fig. 3.23).
Il est clair sur (3.1) que p(M) et V (M) varient en sens contraire (si p augmente alors Vdiminue et vice versa).
Ceci peut etre illustre par une experience simple : en soufflant au-dessus d’une bande depapier, on donne au fluide au dessus de la bande, une vitesse et on cree ainsi une depression quifait s’elever la bande de papier. L’etudiant est engage a faire cette experience.
La forme d’une aile est dessinee de telle sorte que l’air y circule plus rapidement sur sa facesuperieure (extrados) que sur sa face inferieure (intrados). Comme consequence, la pression au-dessus de l’aile est plus faible que la pression en dessous (ceci est en accord avec les observationsfaites (voir paragraphe 3.1.3). La difference de pression ainsi creee est a l’origine du phenomenede portance.
La resultante aerodynamique ~R s’obtient par integration des efforts de pression sur le profil :
~R =∫
profil−p~n ds =
∫profil
−(p− p∞)~n ds

58 CHAPITRE 3. MECANIQUE DU VOL
ou ~n est le vecteur normal au profil, de norme unite et dirige vers l’exterieur du profil (Fig. 3.23).Dans l’expression ci-dessus, la seconde egalite est justifiee : p∞ etant constante, on demontre eneffet, dans des cours plus avances, que l’integrale
∫profil p∞ ~n ds est nulle. Ce resultat est admis
ici.D’apres (3.1), et en utilisant convenablement la conservation de la masse, on peut etablir
que p = p(M) depend de V 2∞. Ce resultat est admis et on ecrira :
P =12
ρ Cz ` d V 2∞ (3.2)
T =12
ρ Cx ` d V 2∞ (3.3)
ou P et T sont la portance et la traınee de l’aile pour une longueur d de generatrice perpendi-culairement au plan du profil, et ou ` est la longueur de la corde du profil. Le coefficient « 1/2 »est purement traditionnel et rappelle l’equation de Bernoulli.Les coefficients Cx et Cz dependent de la forme du profil et de son incidence : ce sont descoefficients sans dimensions (ils n’ont pas d’unite) appeles respectivement « coefficient detraınee » et « coefficient de portance ».
Remarque 1
La forme des equations (3.2) et (3.3) peut a priori etre prevue.En effet, quelles sont les donnees du probleme ?Ce sont : la forme du profil et son incidence (donnees non dimensionnees c’est-a-dire sans
unites) ; la longueur ` de la corde du profil, dont la dimension est une longueur ; la longueurd dont la dimension est aussi une longueur ; la vitesse a l’infini V∞ dont la dimension est unevitesse et la masse volumique ρ de l’air.
Quelles sont les inconnues du probleme ?Ce sont : la portance P (respectivement la traınee T ). Les deux grandeurs P et T sont des
forces. Le principe d’invariance des lois de la physique et de la mecanique par rapport au systemed’unites choisi fait que la solution de notre probleme doit relier des grandeurs sans dimensions,c’est-a-dire sans unites. L’unite pour P et T est le Newton (1 N = 1 kg.m.s−2). Le produitρ ` d V 2
∞ s’exprime aussi en Newton ; rappelons que ρ s’exprime en kg.m−3. Or, a un facteur preson ne peut construire qu’une grandeur sans dimensions avec `, d, V∞, ρ et P (respectivement T ),a savoir P/(ρ ` d V 2
∞), (respectivement T/(ρ ` d V 2∞)). Si l’on note Cz/2 (respectivement Cx/2)
ce rapport, il vient :
P
ρ ` d V 2∞
=Cz
2= fonction (forme, incidence)
T
ρ ` d V 2∞
=Cx
2= fonction (forme, incidence)
Remarque 2
En fait, en donnant ces deux dernieres formules, nous venons d’effectuer un « raisonnementpas tout a fait correct ».
– En effet, en fluide parfait et en bidimensionnel, on peut montrer que la traınee est toujoursnulle. En fait la traınee provient essentiellement du frottement visqueux.
– Par ailleurs, la traınee de frottement ne varie pas vraiment comme le carre de la vitesse(d’ailleurs, l’equation de Bernoulli n’est pas valable en fluide visqueux). En realite, en ce quiconcerne surtout la traınee, la similitude geometrique ne suffit pas pour transposer les resultats

3.3. AVION COMPLET 59
d’une experience a l’autre. On ne peut comparer que des ecoulements correspondant au memenombre de Reynolds Re defini par :
Re =ρ
µV 2∞ `
ou µ est le coefficient de viscosite de cisaillement du fluide. Ce nombre de Reynolds mesure lerapport des effets d’inertie aux effets visqueux.
Si la maquette de soufflerie est 10 fois plus petite que l’avion grandeur nature (c’est-a-direque ` est remplace par `/10), il faut multiplier la vitesse par
√10 pour conserver le meme nombre
de Reynolds Re. Mais il paraıt difficile de multiplier la vitesse par√
10 dans la soufflerie parrapport a la realite : en effet, la vitesse d’un avion est de l’ordre de 1000 km/h et il faudrait« souffler » avec une vitesse de 3160 km/h !). Donc, sauf a changer de gaz, c’est-a-dire les valeursde ρ et µ, le nombre de Reynolds sera desesperement plus petit pour la maquette que pourl’avion a l’echelle 1 ; les effets visqueux seront plus importants et les resultats ne seront pas noncompletement transposables.
Outre la traınee de frottement, il existe en bidimensionnel une traınee de forme, correspon-dant au decollement de la couche-limite avant le bord de fuite : a l’approche du decrochage, ledecollement remonte tres vite vers l’amont et la traınee de forme augmente dramatiquement :c’est ce qu’on va observer dans le paragraphe 3.2.3 suivant.
Retenons donc ceci : dans le cas d’un ecoulement plan autour d’un profil, il y a deux sourcesde traınee, le frottement (traınee de frottement) et le decollement (traınee de forme), liees toutesdeux (directement ou indirectement) a la viscosite de l’air.
3.2.3 Polaire du profil
Nous avons vu (voir remarque 1 precedente) que les coefficients de traınee Cx et de portanceCz dependent de la forme du profil et de son incidence.
Considerons un profil donne. Pour une incidence α donnee, portons en ordonnee la valeurdu coefficient de portance Cz et en abscisse celle du coefficient de traınee Cx. Les valeurs de Cx
et Cz sont obtenues a partir de mesures de P et T obtenues experimentalement. En faisant varierl’incidence α, on obtient une courbe (Fig. 3.24) parametree par l’incidence α. Cette courbe estappelee polaire du profil. Sur la figure 3.24, on remarque que pour α assez grand (α > 20◦, lecoefficient Cx de traınee augmente tres fortement et le coefficient de portance Cz diminue.
Il y a une polaire associee a chaque profil. Sur la figure 3.25, trois polaires pour trois profilsdifferents sont dessinees.
3.3 Avion complet
3.3.1 Coefficient de traınee et coefficient de portance pour l’avion complet
Pour l’avion complet, la resultante des efforts exerces par l’air sur l’avion est ~R (voir para-graphe 3.2.1). Comme pour l’aile, on pose :
~R = ~T + ~P
ou• ~P est la portance perpendiculaire a la trajectoire de l’avion et dirigee « vers le
haut »,• ~T est la traınee parallele a sa trajectoire de l’avion .

60 CHAPITRE 3. MECANIQUE DU VOL
-2°
0°2°
8°
5°
12°
15°
20°
30°25°
Cz
Cx
Cz
Cx
Fig. 3.24 – Polaire d’une aile
0,05
0,10
00,1
0,15
0,2
Cz
Cx
Fig. 3.25 – Trois polaires pour trois profils
Pour l’avion complet, les formules (3.2) et (3.3) deviennent :
P =12
ρ Cz S V 2∞ (3.4)
T =12
ρ Cx S V 2∞ (3.5)
ou S represente la surface des ailes (vue en plan) appelee surface de la voilure, et ou Cx et Cz
sont les coefficients de traınee et de portance globaux de l’avion. Les forces de portance et detraınee pour l’avion complet sont notees ~P et ~T . Elles sont respectivement perpendiculaire etparallele a la trajectoire de l’avion.
3.3.2 Polaire de l’avion
Pour un avion complet, la polaire a la meme allure que celle deja vue pour un profil.Nous avons introduit la polaire d’une aile dans le paragraphe 3.2.3. Pour l’avion complet, on
procede de la meme facon, a partir naturellement des coefficients de traınee Cx et de portanceCz pour l’avion complet. Ces coefficients dependent de la forme de l’avion et de son incidence.
Considerons un avion donne. Pour chaque incidence α, nous mesurons experimentalementles deux coefficients Cz er Cx. Nous dessinons ensuite la courbe representative du coefficient deportance Cz en fonction de α (Fig. 3.26a). De meme, nous dessinons la courbe representativedu coefficient de traınee Cx en fonction de α (Fig. 3.26b).
Par ailleurs, pour une incidence α donnee, portons en ordonnee la valeur du coefficient deportance Cz et en abscisse celle du coefficient de traınee Cx. En faisant varier l’incidence α,on obtient une courbe (Fig. 3.27) parametree par l’incidence α. Cette courbe est la polaire del’avion.
Quelques points remarquables sur la polaire de l’avion
– Point A de portance nulle : c’est le point ou Cz est nul (Cz = 0).

3.3. AVION COMPLET 61
Cz = Cz(α) Cx = Cx(α)
Cz maxD
D
BB
A
A
αA αAαB αBαD αDα α
(a) Coefficient de portance (b) Coefficient de traınee
Fig. 3.26 – Coefficients de portance et de traınee en fonction de l’incidence
– Point B de traınee minimale : c’est le point ou Cx est minimal. On a Cx = Cx min.– Point C de finesse f maximale : rappelons que la finese de l’avion est definie par f = P/T
(voir paragraphe 3.2.1), soit f = Cz/Cx. Le point C est tel que la droite OC ait laplus grande pente. La droite OC est tangente en C a la polaire. La finesse maximale estf = (Cz/Cx)max.
– Point D de decrochage : c’est le point ou Cz est maximal. On a Cz = Cz max.– Point E : en ce point la quantite Cx/Cz
3/2 est minimale ; cette quantite jouera un role clefpar la suite (voir exercice 7, paragraphe 3.7). Le point E est entre les deux points C et D.En effet :1) sur la partie AC de la polaire, en allant de A vers C, on remarque que Cz/Cx croıt
(Cz/Cx est la pente du segment joignant O au point considere de la polaire) donc Cx/Cz
decroıt. De plus, Cz croıt et par suite 1/C1/2z decroıt.
Donc le produit (Cx/Cz) (1/C1/2z ) = Cx/C
3/2z decroıt en allant de A vers C.
2) par ailleurs, quand on s’approche du point D, Cz tend vers une valeur maximale. Onrappelle que Cx et Cz sont des fonctions de α (Fig. 3.26). La derivee par rapport a α
de l’expression Cx/C3/2z est (C ′
x C3/2z − (3/2) Cx C
1/2z C ′
z)/C3z . Cette derivee est positive
au point D car, en D, C ′z est nul et C ′
x est positif. Il y a donc entre C et D, un point oula quantite Cx/Cz
3/2 est minimum (on admet qu’il n’y en a qu’un seul). Ces remarquessont resumees sur le tableau de variation represente sur la figure 3.28.
Tous ces points A, B, C, D et E sont places sur la figure 3.27 et certains sur les figures 3.26aet 3.26b.
3.3.3 Avion en vol sur une trajectoire rectiligne
Pour un avion en vol sur une trajectoire rectiligne, nous recapitulons ici les efforts exerces surl’avion et nous introduisons les notions de puissance necessaire au vol, de puissance disponibleet de puissance utile.
L’avion en vol sur une trajectoire rectiligne est soumis, en general, a quatre forces :– la force de portance ~P perpendiculaire a la trajectoire de l’avion,– la force de traınee ~T parallele a la trajectoire de l’avion,– la force de traction ~F (provenant du ou des moteurs) parallele a la trajectoire de l’avion,– la force de pesanteur m~g de direction verticale, ou m est la masse de l’avion, et ~g l’acce-
leration de la pesanteur.

62 CHAPITRE 3. MECANIQUE DU VOL
Cz
D (Cz max)
E (Cx/C3/2z min) -
C (f = Cz/Cx max)�
B (Cx min)�
A (Cz nul)HHY0
Cx
Fig. 3.27 – Polaire de l’avion
Cx/C3/2z
∞
points A C E D
XXXXXX���
XXXXXXz ������1
Fig. 3.28 – Evolution de Cx/C3/2z le long de la polaire de l’avion
Il faut bien noter que la trajectoire peut etre une droite horizontale (vol de croisiere), unedroite ascendante (vol de montee) ou une droite descendante (atterrissage de l’avion).
Par ailleurs, on note P , T , F et m g les modules des quatre forces ~P , ~T , ~F et m~g.La puissance necessaire au vol de l’avion est notee Wn et vaut :
Wn = T Vp (3.6)
ou Vp est la vitesse de l’avion. C’est la puissance qu’il faut avoir pour vaincre les efforts detraınee.
La puissance disponible de l’avion est celle fournie par les parametres de la motorisationde l’avion (par exemple, un moteur et une helice, ou deux moteurs et deux helices).
La puissance utile de l’avion est notee Wu. C’est la puissance definie par le produit dela traction par la vitesse propre de l’avion :
Wu = F Vp (3.7)
ou F est la traction fournie par les moteurs pour faire voler l’avion a la vitesse Vp.
3.4 Facteur de charge
Le poids de l’avion est mg, mais la charge que doit supporter les ailes est n m g, ou n estun facteur sans dimension pas necessairement entier. Ce nombre n peut etre egal, superieur ouinferieur a 1, comme on va le verifier dans les trois exemples donnes ci-apres.

3.4. FACTEUR DE CHARGE 63
Exemple 1 : Avion en vol de croisiere
L’avion est en vol de croisiere sur une trajectoire horizontale et avec une vitesse constanteVp. La portance est P = (1/2) ρ Cz S V 2
p et la traınee T = (1/2) ρ Cx S V 2p ou S est la surface
des ailes. Le poids total de l’avion est mg et la traction de l’helice est notee F (Fig. 3.29). Lesgrandeurs P , T , mg et F sont positives et correspondent aux modules des forces de portance ~P ,de traınee ~T , de pesanteur m~g et de traction ~F .
On se donne le poids de l’avion donc mg. On se donne aussi l’altitude de croisiere donc lavaleur de la masse volumique ρ de l’air autour de l’avion.
~P
m~g
~T ~F
trajectoire horizontale
Fig. 3.29 – Avion en vol de croisiere
L’equilibre des quatre forces ~P , ~T , m~g et ~F implique :
~P + ~T + m~g + ~F = ~0
La portance ~P et le poids m~g ont la direction verticale. La traınee ~T et la traction ~F ontla direction horizontale. En projettant l’egalite vectorielle ci-dessus sur la direction verticale ilvient :
P −m g = 0P = m g
Le facteur de charge est n = 1.
Exemple 2 : Avion en montee a vitesse constante
L’avion en montee est suppose avoir pour trajectoire une droite faisant un angle γ avec leplan horizontal (Fig. 3.30). La portance ~P perpendiculaire a la trajectoire de l’avion et la traınee~T parallele a la trajectoire doivent equilibrer la resultante du poids reel m~g de l’avion et la forcede traction ~F de l’helice parallele a la trajectoire et de module F . En projection sur la directionde la trajectoire puis sur la perpendiculaire a la trajectoire, il vient :
F = m g sin(γ) + T ; P = m g cos(γ)
La premiere relation montre que la composante du poids selon la trajectoire et la traıneesont compensees par la traction de l’helice.

64 CHAPITRE 3. MECANIQUE DU VOL
~P = m~g cos(γ)
γγ
m~g
trajectoire
de l’avion
Fig. 3.30 – Avion en montee
~P
horizontale~Fc
ϕ
m~g
Fig. 3.31 – Avion en virage
Sur la seconde relation, il apparaıt le « facteur de charge »
n = cos(γ) < 1
Pour un avion en montee, le facteur de charge est donc toujours inferieur a l’unite.Pour un avion en descente a vitesse constante, on a, avec les notations precedentes :
F = −m g sin(γ) + T ; P = m g cos(γ)
Pour un avion en descente, le facteur de charge est donc toujours inferieur a l’unite.
Exemple 3 : Avion en virage
Soit ϕ l’angle d’inclinaison du virage (Fig. 3.31) ; si le virage est bien pris correctement,la portante ~P doit equilibrer la resultante du poids reel m~g de l’avion et de la force centri-fuge ~Fc, due au fait que l’avion a une trajectoire circulaire. Ces trois forces sont dans le planperpendiculaire a la trajectoire de l’avion :
~P + m~g + ~Fc = 0
On a (voir la figure 3.31) en projetant cette equation sur l’horizontale et sur la verticale :
P sin(ϕ)− Fc = 0 ; P cos(ϕ)−m g = 0
P =1
cos(ϕ)m g
Le facteur de charge est :
n =1
cos(ϕ)> 1
Le facteur de charge est donc toujours superieur a l’unite.Donnons maintenant quelques exemples.Les avions de ligne effectuent des virages avec un angle d’inclinaison de 30◦, donc avec un
facteur de charge de n = 1, 15.Les avions de tourisme effectuent des virages avec un angle d’inclinaison de 45◦, donc avec
un facteur de charge de n = 1, 41.Les avions en ecole de pilotage effectuent des virages avec un angle d’inclinaison de 60◦, donc
avec un facteur de charge de n = 2.Les avions de voltige effectuent des virages avec un angle d’inclinaison de 70◦, donc avec un
facteur de charge de n = 2, 92.

3.5. LES EFFETS TRIDIMENSIONNELS 65
depression
surpression
Fig. 3.32 – Avion en trois dimensions
AAAAU
tourbillon marginal
��
���
tourbillonelementaire
nappetourbillonnaire
Fig. 3.33 – Tourbillons
3.5 Les effets tridimensionnels
Le sillage tourbillonnaire
Jusqu’a maintenant, nous avons considere l’ecoulement autour d’une aile d’envergure infi-nie, c’est-a-dire d’une aile de longueur infinie ; le mouvement de l’air autour de l’aile n’est pasbidimensionnel. Si l’envergure est finie, l’ecoulement subit quelques modifications (Fig. 3.32).
L’intrados de l’aile etant en legere surpression, et l’extrados en forte depression, l’air tenda passer de l’intrados a l’extrados en contournant les extremites de l’aile. Il s’agit evidemmentd’un effet nocif, qui tend a diminuer l’ecart de pression entre l’intrados et l’extrados, et donc adiminuer la portance. A part mettre des petites « barrieres » au bout des ailes (les « winglets »)que le fluide contourne malgre tout, mais qui peuvent ameliorer legerement les choses, la seulemaniere de reduire cet effet de contournement est d’augmenter l’allongement de l’aile, c’est-a-dire le rapport envergure/corde moyenne ; mais il y a bien sur a cela des limites imposees par lanecessite de garder une structure d’aile a la fois resistante et legere.
Par ailleurs, derriere l’aile, il y a une « couche de cisaillement » appelee sillage.A travers cette couche le module de la vitesse est continu (tout comme la pression), mais la
direction de la vitesse varie beaucoup. Les lignes de courant sont deviees et il se forme derrierel’aile des surfaces tourbillonnaires appelees aussi nappes tourbillonnaires (Fig. 3.33). En boutd’aile, il y a un tourbillon s’enroulant en cornet (Fig. 3.33) que l’on appelle « tourbillon mar-ginal ». En d’autres mots, derriere l’avion, le sillage se concentre en deux enormes « tourbillonsmarginaux » tournant en sens inverse. Qui dit tourbillon, dit noyau tournant tres vite, d’oudepression et refroidissement. Ceci explique les deux « traınees de condensation » que laissentparfois dans le ciel des avions a haute altitude.
Cette nappe tourbillonnaire s’etend tres loin en aval de l’avion, car elle s’amortit tres peu.Il est dangereux de traverser le sillage d’un avion, surtout s’il est gros (un avion de tourisme,passant dans le proche sillage d’un avion de transport, serait retourne comme une crepe). C’estainsi que, sur les aeroports, on observe un decalage de temps minimal entre deux decollagessuccessifs. La « puissance gaspillee » a creer, et a maintenir ce sillage, se traduit par l’apparitiond’une nouvelle forme de traınee. Cette traınee s’ajoute a la traınee de frottement et a la traıneede forme introduites a la fin du paragraphe 3.2.2.
3.6 Le decrochage, l’hypersustentation
3.6.1 Le decrochage
Imaginons un avion en vol de croisiere. Reduisons les gaz a fond, et maintenons l’altitudeen cabrant progressivement l’avion (Fig. 3.34). La vitesse V∞ diminue et l’angle d’incidence α

66 CHAPITRE 3. MECANIQUE DU VOL
augmente. Le coefficient Cz augmente (voir figure 3.34). Nous parcourons ainsi la polaire del’avion dans le sens de la fleche (Fig. 3.34). Toutefois, quand le point D est passe, la portancediminue ; l’avion s’enfonce et si l’incidence α augmente encore, nous parcourons l’arc DG defacon precipitee (voir figure 3.35). Il convient alors de « remettre les gaz » et de laisser l’avionreprendre de la vitesse. C’est pour cette raison que le point D est appele point de decrochage(voir paragraphe 3.3.2).
CzD
G
Cx
Fig. 3.34 – Polaire de choc et phenomene dedecrochage
Fig. 3.35 – Point D de decrochage
Sans risque lorsqu’il se produit assez haut (l’avion perd peut-etre 30 m), le decrochage estdangereux a basse altitude. Toutefois, il faut noter qu’un atterrissage est une situation pastres eloignee d’un decrochage. Certains dispositifs (lampe ou sonnerie) avertissent le pilote del’imminence du decrochage.
Notons que le decrochage correspond a un angle d’incidence, et non a une vitesse precise. SiCz max est le maximum du coefficient Cz sur la polaire (Fig. 3.27), correspondant a un certainangle d’incidence αmax, la vitesse de decrochage Vdecrochage est donnee par :
n m g =12
ρ Cz max S (Vdecrochage)2 ⇒ Vdecrochage =√
2 n m g
ρ Cz max S(3.8)
ou n mg est la charge que doit supporter l’aile, m g le poids de l’avion, et n (nombre sansdimension pas necessairement entier) « le facteur de charge ».
Rappelons que le facteur de charge n’est pas necessairement egal a l’unite, comme ceci a etevu dans les exemples donnes dans le paragraphe 3.4.
3.6.2 L’hypersustentation
Sur les avions modernes, on essaie d’eviter un decrochage franc, soit a l’aide de profilsspecialement etudies, soit en vrillant l’aile pour que la totalite de celle-ci ne decroche pas enmeme temps, soit en installant un « bec de bord d’attaque ». Ce « bec » est une sorte de

3.6. LE DECROCHAGE, L’HYPERSUSTENTATION 67
���fente
Fig. 3.36 – Voletd’ouverture
50◦
position d’atterrissage
Fig. 3.37 – Positiond’atterrissage
15◦
position decollage
Fig. 3.38 – Positionde decollage
volet colle a l’avant de l’aile, qui sort tout seul a l’approche du decrochage, menageant ainsi unefente qui « souffle » la couche limite et l’empeche de decoller (voir Fig. 3.36, 3.37 et 3.38).
Pour augmenter la portance, et donc diminuer la vitesse de decrochage (et par suite lavitesse d’atterrissage et comme consequence la longueur d’atterrissage), de nombreux dispositifsde volets hypersustentateurs, avec ou sans fente ont ete concus.

68 CHAPITRE 3. MECANIQUE DU VOL
3.7 Mecanique du vol : Exercices avec correction
3.7.1 Exercice 1 : Vol de croisiere (en palier stabilise)
L’avion est en vol de croisiere sur une trajectoire horizontale avec une vitesse constante Vp.La portance est P = (1/2) ρ Cz S V 2
p et la traınee T = (1/2) ρ Cx S V 2p ou S est la surface des
ailes. Le poids total de l’avion est mg et la traction de l’helice est notee F . Dans cet exercice, lesgrandeurs P , T , m g et F sont positives et correspondent aux modules des forces de portance~P , de traınee ~T , de pesanteur m~g et de traction ~F . Ces differentes forces sont indiquees sur lafigure 3.29.
On suppose donnees la charge de l’avion, donc mg, et l’altitude de croisiere, donc la valeurde la masse volumique ρ de l’air autour de l’avion.1-1 Le but de cette question est de d’etudier la puissance necessaire au vol de l’avion, puissanceque l’on notera Wn. Pour ceci, repondre aux questions suivantes :
– Exprimer Wn en fonction de T et de la vitesse Vp.– Exprimer la portance P en fonction du poids m g.– Calculer la puissance Wn en fonction de la finesse f = Cz/Cx, du poids m g et de la vitesse
Vp.– Exprimer la vitesse Vp en fonction de m g, ρ S et Cz.– Calculer la puissance Wn en fonction de m g, ρ S et Cx/C
3/2z .
1-2 Supposons la polaire de l’avion, la surface de la voilure S, l’altitude de croisiere (c’est-a-direρ) et la vitesse Vp donnees. L’avion peut-il voler ?1-3 Supposons donnees, la polaire de l’avion, la surface S, l’altitude de croisiere (c’est-a-dire ρ)et l’incidence α (avec α < αD ou αD est l’incidence du point D de decrochage). Quelle vitesseVp l’avion peut-il atteindre ?
Corrige
1-1 – La puissance necessaire au vol de l’avion est :
Wn = T Vp (V1.1)
– La portance doit equilibrer le poids :P = m g (V1.2)
Par ailleurs, la traınee est equilibree par la traction F :
F = T (V1.3)
– En utilisant les expressions pour P et T en fonction des coefficients de portance et de traınee(P = (1/2) ρ Cz S V 2
p et T = (1/2) ρ Cx S V 2p ), il vient :
Wn = (1/2) ρ Cx S V 3p (V1.4)
m g = (1/2) ρ Cz S V 2p (V1.5)
De (V1.4) et (V1.5) on deduit :
Wn = m g VpCx
Cz
soit, en introduisant la finesse de l’aile f = P/T = Cz/Cx :
Wn =m g Vp
f(V1.6)

3.7. MECANIQUE DU VOL : EXERCICES AVEC CORRECTION 69
– A partir de (V1.5), il est facile d’obtenir Vp en fonction de m g, ρ S et Cz. On a :
Vp =(m g)1/2√(1/2) ρ S
1
C1/2z
(V1.7)
En revenant a la formule (V1.4) pour Wn et en utilisant la formule (V1.7) pour Vp, on obtient :
Wn =(m g)3/2√(1/2) ρ S
Cx
C3/2z
(V1.8)
Wn est la puissance necessaire au vol de l’avion.Nous allons maintenant faire une serie de remarques sur les differentes formules que nous
venons d’ecrire, au travers des deux questions suivantes.
1-2 La formule (1-5) donne la valeur de Cz en fonction des donnees.– Si Cz est superieur a Cz max (voir le point D sur la polaire de la figure 3.27), alors le problemen’a pas de solution ; l’avion ne peut pas voler. Ceci peut etre du par exemple, a un poids m gtrop important.– Si Cz est inferieur a Cz max alors la courbe de la figure (3.26a) fournit l’incidence de l’aile, carla connaissance de Cz permet de connaıtre α. La courbe de la figure 3.26b fournit ensuite Cx, carconnaissant α on trouve Cx. Avec la formule (V1.4), on determine la puissance Wn necessaireau vol de l’avion. L’avion volera si le moteur fournit cette puissance.
1-3 L’incidence α etant donnee, on a donc un point precis sur la polaire donc des valeurs precisespour Cx et Cz.
La formule (V1.7) donne la vitesse Vp, et la formule (V1.8) donne la puissance necessairepour que l’avion vole avec la vitesse Vp.
Nous terminons cet exercice 1 par quelques remarques.
Remarques
Remarquons sur la formule (V1.7) que plus le coefficient de portance Cz est petit, plus lavitesse Vp est grande. Remarquons aussi que plus l’altitude est elevee (ρ diminue avec l’altitude),plus la vitesse Vp est grande.Remarquons sur la formule (V1.8) que la puissance necessaire pour le vol est d’autant plus petiteque Cx/C
3/2z est plus petit. Elle est minimale au point E de la polaire (Fig. 3.27).
3.7.2 Exercice 2 : Puissance necessaire pour le vol de l’avion
L’avion est en vol de croisiere sur une trajectoire horizontale avec une vitesse constante Vp.Les notations sont celles de l’exercice 1. Pour un avion donne, considerons les deux expressions(V1.7) et (V1.8) pour la vitesse Vp et la puissance Wn necessaire pour maintenir l’avion en volstabilise sur une trajectoire horizontale.
2-1 A partir des figures 3.26a et 3.26b, donner l’allure de la courbe donnant Wn en fonction deVp, pour une altitude donnee (c’est-a-dire un ρ donne).
2-2 A l’altitude z = 0, la masse volumique de l’air est ρ0 et a l’altitude z, elle vaut ρ. Commentpasse t-on de la courbe Wn = Wn(Vp) a z = 0 a la courbe Wn = Wn(Vp) a l’altitude z ?
Application numerique : ρ0 = 1, 20 kg.m−3, masse volumique ρ a l’altitude z = 1300 m :ρ = 1, 07 kg.m−3.

70 CHAPITRE 3. MECANIQUE DU VOL
D
E
A
Wn
Wn
0 Vp
Vp
α
point A B C E D
Cz
Cx
Wn ou Cx/C3/2z
Vp ou 1/C1/2z
-
PPPPPq
-0
-XXXz
--
-���:
Fig. 3.39 – Puissance utile – Puissance necessaire au vol
Corrige
2-1 L’altitude etant fixee, ρ est alors fixe. Soit une incidence α donnee. Les courbes des deuxfigures 3.26a et 3.26b donnent les valeurs de Cx et de Cz. On en deduit ensuite les valeurs de Vp
et de Wn par les formules (V1.7) et (V1.8). On place alors ce point dans le plan (Wn, Vp) (Fig.3.39).
Avant de dessiner la courbe representative de Wn = Wn(Vp), placons dans un tableau, lesvariations des differentes grandeurs en fonction de α. Les variations de Cz et Cx sont obtenuesa partir de la lecture des figures 3.26a et 3.26b. D’apres (V1.8), la variation de Wn est identiquea celle de Cx/C
3/2z deja vue dans le cours dans le tableau de la figure 3.28. Enfin la variation de
la vitesse Vp se deduit de celle de Cz en utilisant la formule (V1.7). Ces variations sont porteessur le tableau dans la figure 3.39. Le trace de la courbe Wn = Wn(Vp) s’en deduit (Fig. 3.39) :de A a E, Wn et Vp decroissent tous les deux, d’ou le trace de la courbe dans le plan (Vp,Wn) ;de E a D, Wn croıt mais Vp continue de decroıtre, d’ou le trace de la courbe.
On peut aussi dire que de D vers E, Wn decroıt et Vp croıt, et que de E vers A, Wn et Vp
croissent tous les deux et tendent vers l’infini (car Cz est nul au point A). Le point D correspondau minimum de Vp et le point E au minimum de Wn.
2-2 D’apres l’expression (V1.8) on a :
Wn(altitude z = 0) =(m g)3/2√(1/2) ρ0 S
Cx
C3/2z
Wn(altitude z) =(m g)3/2√(1/2) ρ S
Cx
C3/2z
d’ou :
Wn(altitude z)Wn(altitude z = 0)
=(
ρ0
ρ
)1/2

3.7. MECANIQUE DU VOL : EXERCICES AVEC CORRECTION 71
De meme, d’apres (V1.7) on a :
Vp(altitude z)Vp(altitude z = 0)
=(
ρ0
ρ
)1/2
On passe donc de la courbe Wn(Vp)(altitude z = 0) a la courbe Wn(Vp)(altitude z) par unehomothetie de centre O et de rapport
√ρ0/ρ (Fig. 3.40). Le rapport
√ρ0/ρ est toujours plus
grand que 1.Application numerique :
√ρ0/ρ =
√1, 20/1, 07 = 1, 12. Remarquons que ce rapport d’homothe-
tie n’est que legerement plus grand que 1.
WnD
E
Aaltitude z
altitude z = 0
0
Fig. 3.40 – Puissance necessaire au vol suivant l’altitude
3.7.3 Exercice 3 : Puissance necessaire pour le vol de l’avion et puissanceutile
Rappelons que la puissance necessaire pour le vol de l’avion est Wn = T Vp, et que lapuissance utile de l’avion est Wu = F Vp, ou T est la traınee, F la portance et Vp la vitessepropre de l’avion.
Sur la figure 3.41, la courbe dessinee Wu = Wu(Vp) est supposee donnee. Il faut bien remar-quer que la traction F n’est pas une constante, et qu’elle depend des phases de vol de l’avion.
Naturellement Wu = Wu(Vp) est nulle si l’avion est a l’arret, et Wu augmente quand Vp
augmente. Puis il y a une « plage utile » pour la vitesse Vp dans laquelle le moteur est bienadapte et ou Wu est pratiquement constant. Enfin si Vp depasse un certain seuil, le moteurest inadapte et la puissance chute. Ce trace pour la courbe Wu = Wu(Vp) est une donnee del’exercice.
Sur la meme figure 3.41, nous avons dessine la courbe Wn = Wn(Vp), courbe deja dessineedans l’exercice 2 (Fig. 3.39).
Pour que le vol soit possible, il faut bien sur que la puissance utile soit plus grande que lapuissance necessaire au vol de l’avion. En d’autres termes la courbe representative de Wu =Wu(Vp) doit etre au-dessus de la courbe representative de Wn = Wn(Vp) sur une plage non videde Vp, disons (V2, V1) (voir Fig. 3.41).
Si Wu(Vp) > Wn(Vp), la traction de l’avion est superieure a ce qu’il est necessaire pours’opposer a la traınee, donc Vp va augmenter.
Si Wu(Vp) < Wn(Vp), la traction de l’avion est inferieure a ce qu’il est necessaire pours’opposer pour s’opposer a la traınee, donc Vp va diminuer.

72 CHAPITRE 3. MECANIQUE DU VOL
Wn
Wu D
2
sE(Cx/C3/2z min)
1
A
0 V2 V1
@@
@R
Wn = Wn(Vp)
Wu
=W
u(V
p)
Fig. 3.41 – Points d’equilibre V1 et V2
3-1 En considerant la figure 3.41, comment se comporte la vitesse propre Vp de l’avion si a uninstant donne on a :
(a) V2 < Vp < V1 (b) Vp > V1 (c) Vp < V2
3-2 L’avion a t-il interet a voler avec une vitesse proche de V1 ou bien une vitesse proche de V2 ?
Wn
WuD
sE(Cx/C
3/2z min)
A
0 Vp
?
Wu altitude z1
?
Wu altitude z2 > z1
���*Wn
Fig. 3.42 – Puissance utile suivant l’altitude
Corrige
3-1 Si V2 < Vp < V1, alors Wu(Vp) > Wn(Vp). La puissance utile est superieure a la puissancenecessaire pour faire voler l’avion, donc la vitesse Vp va augmenter et s’approcher de V1.
Si Vp > V1, alors Wu(Vp) < Wn(Vp). La puissance utile est inferieure a la puissance necessairepour faire voler l’avion, donc la vitesse Vp va diminuer et s’approcher de V1.
Si Vp < V2, alors Wu(Vp) < Wn(Vp). Pour les memes raisons que ci-dessus, la vitesse Vp vadiminuer. Donc on s’eloigne de V2 vers la gauche et l’avion perd sa vitesse et « chute ». C’estcette situation que l’on utilise en phase d’atterrissage.3-2 Le regime avec Vp = V1 est un regime stable et sain. Si la vitesse Vp est voisine de V1, cettevitesse Vp a tendance a revenir vers V1.

3.7. MECANIQUE DU VOL : EXERCICES AVEC CORRECTION 73
Le regime avec Vp = V2 est un regime instable et dangereux. Si la vitesse Vp est voisine de V2,cette vitesse Vp a tendance a s’en eloigner et a aller soit vers la vitesse V1, soit vers la vitessenulle.
Nous terminons cet exercice par une remarque.
RemarqueOn verifie experimentalement que lorsqu’on augmente l’altitude, la courbe Wn = Wn(Vp)
varie peu, et que la courbe Wu = Wu(Vp) s’abaisse (Fig. 3.42). Comme consequence, la plagehorizontale (V2, V1) se restreint car V2 augmente et V1 diminue (voir figure 3.42). A la limite,il ne reste que le point E (V1 = V2 = E). On est alors au plafond, lequel est atteint pourl’incidence donnant le minimum de Cx/C
3/2z .
3.7.4 Exercice 4 : Avion en montee ou en descente
Considerons un avion en montee a vitesse constante ~Vp de module Vp selon la trajectoirerectiligne faisant un angle γ avec l’horizontale (Fig. 3.43a). La traction de l’helice est F .
pesanteur
avion
horizontale
Vp
γ
(a)
~P ~P
~T
~T~F
~F
m~g m~gγ γ
(b) avion en montee (c) avion en descente
Fig. 3.43 – Avion en montee et en descente
4-1 Ecrire, pour l’avion, l’equilibre des forces qui lui sont appliquees : poids m~g, traction del’helice ~F , portance ~P et traınee ~T . Mettre sur une figure ces differentes forces.
4-2 On note Vz la vitesse de l’avion en projection sur la verticale (Vz = ~Vp ·~z, ou ~z est le vecteurunitaire vertical dirige vers le haut). Exprimer Vz en fonction de Wn = Wn(Vp), Wu = Wu(Vp)et m g. Pour quelle incidence cette vitesse Vz est-elle maximale ?
4-3 On suppose que l’angle γ est petit. Donner pour γ (en radians) une expression en fonctionde F , m g et de la finesse f de l’avion (f = Cz/Cx = P/T ).
4-4 Considerer le meme avion en descente a vitesse ~Vp constante selon la meme trajectoirerectiligne. Reprendre les deux questions 4-1 et 4-2.
Corrige
4-1 L’avion est soumis aux quatre forces listees dans l’enonce. La portance est perpendiculairea la trajectoire. La traınee et la traction de l’helice sont paralleles a la trajectoire (Fig. 3.43b).

74 CHAPITRE 3. MECANIQUE DU VOL
On projette ces quatre forces sur la trajectoire et sur la direction normale a la trajectoire. Ilvient :
−T −m g sin(γ) + F = 0 ; −m g cos(γ) + P = 0
soit :P = m g cos(γ) ; F = m g sin(γ) + T
Les quatre forces sont representees sur la figure 3.43b.4-2 Par definition :
Wn = T Vp ; Wu = F Vp ; Vz = Vp sin(γ)
En utilisant les resultats de la question 4-1, il vient :
Wu = (m g sin(γ) + T ) Vp
Wu = m g Vz + Wn
Vz =Wu −Wn
m g
Remarquons sur cette derniere formule, que Wu −Wn positif implique Vz positif.La vitesse est maximale lorsque Wu −Wn est maximale, c’est-a-dire au point E de la figure
3.41 (voir exercice 3). La vitesse Vz est donc maximale pour l’incidence qui correspond a Cx/C3/2z
minimal.4-3 D’apres la question 4-1, on a :
cos(γ) =P
m g; sin(γ) =
F − T
m g
Si γ est petit, cos(γ) ∼= 1 et sin(γ) ∼= γ. On a alors :
P ∼= m g ; F − T ∼= m g γ
soit :γ ∼=
F
m g− T
Pou γ ∼=
F
m g− 1
f
Cette derniere formule donne l’angle γ de la montee pour l’avion considere. La montee n’estpossible que si la traction verifie :
F >m g
f
Plus le poids est grand, plus F doit etre grande (ce qui est intuitif). Plus la finesse est grande,plus F doit etre petite (ce qui est aussi intuitif et tres important pour les economies de kerosene).4-4 Dans le cas d’un avion en descente, la portance et le poids sont inchanges par rapport aucas de l’avion en montee. Par contre, la traınee et la traction sont changees en direction (Fig.3.43c). Les reponses aux questions 4-1 et 4-2 sont alors :
T −m g sin(γ)− F = 0 ; −m g cos(γ) + P = 0
soit :P = m g cos(γ) ; F = −m g sin(γ) + T
Par ailleurs :Wn = T Vp ; Wu = F Vp ; Vz = −Vp sin(γ)
(Vz est negatif en descente). Il vient :
Vz =Wu −Wn
m g
Remarquons ici, que Wu−Wn est negatif afin que la vitesse Vz soit bien negative. On est sur laportion Vp < V2 de la courbe Wu = Wu(Vp) dessine sur la figure 3.41.

Chapitre 4
Energetique
D’apres des notes de cours de 2004-05 de collegues de l’Universite Pierre et Marie Curie
4.1 Introduction
Lors de l’etude de la mecanique du vol, nous avons etudie le mouvement de l’avion pro-pulse, notamment par une helice. Mais nous ne nous sommes pas interesses a ce qui faisaittourner l’helice. C’est ce que nous allons faire pendant cette partie de cours consacree au theme« energetique ».
Comme introduction, nous presentons quelques exemples de moteur, que nous avons extraitsdu reseau. Plus precisement ce sont :
– Fig. 4.1 : http://www.ifp.fr/espace-decouverte-mieux-comprendre-les-enjeux-energeti
ques/les-cles-pour-comprendre/automobile-et-carburants/les-moteurs-conventionnels
– Fig. 4.2 : http://museedelta.free.fr/technique/turbo_reacteur.htm– Fig. 4.3 : http://www.walterengines.com/products/aircraft-engines/description.htm– Fig. 4.4 : http://www.techno-science.net/?onglet=glossaire&definition=264
Un moteur automobile conventionnel (Fig. 4.1) est constitue, tres schematiquement, d’unechambre de combustion delimitee par une culasse, le cylindre, et le piston. La combustion dumelange air-carburant dans la chambre de combustion se traduit par une elevation de la pressiondes gaz, ce qui provoque le deplacement du piston et comme consequence celui du systeme bielle-manivelle.
Un turboreacteur est une turbomachine produisant une poussee de « reaction ». Inventesvers les annees 1930, les turboreacteurs ont equipe les premiers avions (des chasseurs-bombar-diers) en serie a la fin de la seconde guerre mondiale. Apres la guerre, les turboreacteurs sesont generalises. Leur rendement et leur fiabilite se sont considerablement ameliores. Les tur-boreacteurs d’aujourd’hui sont des machines d’une extreme complexite. Le developpement d’unnouveau moteur demande des moyens humains, technologiques et financiers considerables queseules quelques rares entreprises possedent dans le monde. Le cout d’un turboreacteur est tresimportant et represente, en general, pour un avion, le tiers du cout total de l’appareil. Le prin-cipe de fonctionnement est montre sur la figure 4.2. L’air envoye dans le turboreacteur estd’abord comprime par l’intermediaire d’un compresseur (les proprietes de l’air changent), puisil est melange a du carburant et enfin on declenche une combustion (Fig. 4.2). Remarquonsque dans un turbo-reacteur, il n’y a pas d’helice ; la poussee est uniquement realisee par lesgaz d’echappement. Dans ce processus, le gaz est chauffe et cela se traduit par une poussee,c’est-a-dire par une action mecanique.
75

76 CHAPITRE 4. ENERGETIQUE11/06/10 09:10Architecture moteur
Page 1 sur 1http://www.ifp.fr/layout/set/popup/espace-decouverte-mieux-compren…bile-et-carburants/les-moteurs-conventionnels/architecture-moteur
Architecture moteur
Fig. 4.1 – Moteur a quatre temps
Vue éclatée d’un réacteur SNECMA ATAR 09
compres-seur
chambre decombustion
tuyère
turbin
eentréed’air
écoulementdu jet etpousséedes gaz
Fig. 4.2 – Turboreacteur

4.1. INTRODUCTION 77
Expression de la poussee d’un turboreacteur
La poussee d’un turboreacteur peut etre calculee tres approximativement a partir de laformule suivante :
Fpoussee = m× (Vsortie − Ventree)
ou : m est le debit massique de l’air passant dans le moteur, le debit du carburant etant negli-geable, Vsortie est la vitesse de sortie des gaz de la tuyere, Ventree est la vitesse d’entree des gazdans le compresseur.
On remarque que m × Vsortie represente la poussee de la tuyere, tandis que m × Ventree
correspond a la traınee de l’air. Ainsi pour que le turboreacteur cree une poussee vers l’avant,il faut naturellement que la vitesse des gaz d’echappement soit superieure a celle de l’avion(c’est-a-dire de l’air entrant dans le moteur).
Le turbo-propulseur est un ensemble constitue d’une helice mise en mouvement par uneturbomachine qui convertit l’essentiel de l’energie des gaz produits par la combustion en energiemecanique. Ce n’est pas, a proprement parler, un moteur a reaction mais il y a des simila-rites. Pour les avions, les limitations aerodynamiques des helices limitent l’utilisation des turbo-propulseurs a des vitesses inferieures a environ 0,7 fois la vitesse du son (on dit Mach 0,7), lenombre de Mach etant defini par le rapport de la vitesse de l’avion et de la vitesse du son. Lavitesse du son dans l’atmosphere pres du sol est de l’ordre de 330 m/s soit 1200 km/h.
Le turbo-propulseur est un moteur extremement complexe (voir la photo de la figure4.3). Son fonctionnement est decrit sur la figure 4.4. Donnons neanmoins une description rapidede son fonctionnement. L’air entre dans le compresseur, est comprime, entre ensuite dans lachambre de combustion et sort par des tuyeres.
Fig. 4.3 – Photo d’un turbo-propulseur
L’energie liberee par les gaz brules permet d’actionner une turbine : en effet, la chaleur dela reaction de combustion entraıne une augmentation de volume, ce qui cree une poussee sur lesaubes de la turbine. Le mouvement de la turbine permet d’entraıner une helice. L’energie libereesert egalement a faire fonctionner le compresseur. Dans ce processus, on souhaiterait idealementque les gaz d’echappement sortent a vitesse nulle, et que l’on recupere le maximum possibled’energie cinetique. Ce n’est evidemment pas le cas, mais les gaz d’echappement procurent enfait une poussee supplementaire qui s’additionne a celle procuree par l’helice.
De quoi avons-nous besoin pour comprendre le fonctionnement du turbo-propul-seur ? Il nous faut comprendre comment on peut obtenir une action mecanique (faire tournerune helice) a partir d’un echauffement (ici l’air melange au carburant). Ceci sera vu dans leparagraphe 4.5 de ce chapitre.
Remarques sur les domaines d’utilisation des moteurs
Les turboreacteurs sont utilises sur tous les avions civils, moyens et gros porteurs, car ilssont les seuls a pouvoir atteindre des vitesses transsoniques (entre Mach egal a 0,8 et Mach egal

78 CHAPITRE 4. ENERGETIQUE
72 3 4 5 68
9
1
L’helice (8) pre-comprime l’air admis dans les entrees d’air (1). L’energie cinetique des gazde la chambre de combustion (4) sert a : • actionner les turbines (5) qui entraınent lescompresseurs (2), • actionner la turbine (6) qui entraıne le reducteur (9), lui-meme entraınantl’helice, • fournir une poussee a l’avion par l’echappement des gaz dans la tuyere (7).
Fig. 4.4 – Fonctionnement d’un turbo-propulseur(Figure extraite de : http://www.techno-science.net/?onglet=glossaire&definition=264)
a 1). Dans l’aviation militaire, l’utilisation du turboreacteur s’est generalisee. Elle a permis dedepasser le « mur » du son, c’est-a-dire la vitesse du son (Mach superieur a 1).
Les turbo-propulseurs equipent en general des avions moins rapides (autour de 500 km/h) etde plus petite taille (moins de 80 passagers).
Seuls, les petits avions de tourisme sont encore equipes de moteurs a explosion a pistons.
4.2 Premier principe de la thermodynamique
4.2.1 Observation : action mecanique resultant d’un echauffement
Considerons une masse M posee sur un ballon rempli d’air. Chauffons le ballon. L’air dansle ballon se dilate et la masse se souleve (Fig. 4.5)
��
��+
-masse M
���*flamme
Fig. 4.5 – Echauffement d’un ballon
La chaleur (c’est-a-dire l’energie apportee a l’air en chauffant) a ete convertie en travailmecanique. Il y a eu transformation de la chaleur en energie cinetique (pendant le mouvementascendant de la masse M), ou en energie potentielle de la pesanteur (a la fin de l’experiencelorsque la masse M est au repos dans sa position la plus haute).

4.2. PREMIER PRINCIPE DE LA THERMODYNAMIQUE 79
4.2.2 Systeme ferme, systeme ouvert
Dans l’analyse energetique, on va proceder comme dans le chapitre sur la mecanique desstructures : pour ecrire le « principe fondamental de la statique », on a isole un systeme dumilieu exterieur et on a examine tous les efforts exterieurs agissant sur le systeme.
Dans l’analyse energetique, on va egalement ecrire un bilan pour un systeme. Mais unprobleme supplementaire apparaıt : certains systemes sont clairement isoles de l’exterieur (exem-ple du ballon rempli d’air), mais d’autres sont ouverts (par exemple dans un moteur ou de l’airet du carburant entrent dans le moteur et ou les gaz brules en sortent).
Considerons un corps ou un ensemble de corps que nous supposons limite par une surfaceΣ, eventuellement deformable, a travers laquelle pourront s’effectuer des echanges d’energie eteventuellement de matiere avec le milieu exterieur (Fig. 4.6).
systeme ferme : le systeme est dit {ferme} s’il n’y a aucun transfert de matiere a travers Σ.systeme ouvert : le systeme est dit {ouvert} s’il y a un transfert de matiere a travers Σ.
echanges avecl’exterieur
systeme Σ
Fig. 4.6 – Systeme Σ
4.2.3 Qu’est-ce que l’energie ?
α – Energie cinetiquePour un point materiel P de masse m et de vitesse ~V , l’energie cinetique est 1
2 m ~V 2.
Pour un ensemble de N points materiels de masse mi et de vitesse ~Vi, avec i = 1, 2, . . . , N ,l’energie cinetique est
∑i=Ni=1
12 mi
~V 2i .
Pour un systeme materiel (par exemple un avion, une automobile, . . . ), et si on considere cesysteme comme la reunion d’un grand nombre de points materiels, on somme les energiescinetiques de tous ces points, et on definit ainsi l’energie cinetique du systeme considere.
β – Energie potentielle (cas de la pesanteur)Soit a nouveau le point P de masse m. Placons-le dans le champ de la pesanteur. In-troduisons l’axe Oz vertical, dirige vers le haut et notons ~g = −g ~ez l’acceleration de lapesanteur (Fig. 4.7), ou le vecteur ~ez est unitaire, vertical et dirige vers le haut. La force depesanteur s’exercant sur le point P est m~g = −m g~ez. On introduit l’energie potentielle−m g z correspondante. Il est clair que :
−m g =ddz
(−m g z)
On dit que la force de pesanteur derive d’un potentiel, celui-ci etant : −m g z.Plus generalement, pour un corps de masse M place dans le champ de la pesanteur, onpeut introduire l’energie potentielle de la pesanteur qui est −M g z + C, ou cette fois-ci z

80 CHAPITRE 4. ENERGETIQUE
point materielmasse m
P~g
~ez
sol
Fig. 4.7 – Point materiel dans le champ de la pesanteur
est la cote du centre de gravite G du corps considere et ou C est une constante arbitraireque l’on peut prendre egale a zero.
γ – Energie interneSoit le systeme note Σ introduit dans le paragraphe 4.2.2. On introduit l’energie interne deΣ. L’energie interne regroupe toutes les energies a l’echelle microscopique. On peut ainsilister, en augmentant progressivement la complexite de la matiere :
(a) l’energie moleculaire due a l’agitation des molecules au sein de la matiere,
(b) l’energie chimique due aux reactions entre molecules,
(c) l’energie atomique due aux mouvements a l’echelle des atomes,
(d) l’energie due eventuellement a d’autres phenomenes physiques.
Exemple
Nous allons donner un exemple d’energie interne, en examinant le cas d’un systeme Σconstitue par un gaz au repos. On suppose ce gaz constitue par un tres grand nombreN de molecules identiques. Numerotons les molecules de 1 a N . Chaque molecule a unemasse et une vitesse. La masse de chaque molecule est m, sa vitesse est ~vi et son energiecinetique est 1
2 m~v 2i (i = 1, 2, . . . , N).
Le systeme complet des N molecules est au repos, donc la vitesse moyenne des N moleculesest nulle :
1N
i=N∑i=1
m~vi =1N
m (~v1 + ~v2 + . . . + ~vN ) = ~0
Mais ce meme systeme de N molecules contient de l’energie cinetique a savoir :
i=N∑i=1
12
m~vi2 =
12
m~v 21 +
12
m~v 22 + . . . +
12
m~v 2N
C’est cette energie emmagasinee dans le systeme Σ que l’on appelle energie interne de Σ.Notons qu’il n’est pas, en general, tres facile de definir l’energie interne d’un systeme. Maisnous admettrons qu’on peut toujours le faire.
4.2.4 Chaleur, puissance calorifique
L’etat d’un systeme peut varier sans qu’il y ait ni mouvement (macroscopique), ni actionmecanique. Comme experience simple, prenons un bloc de metal chaud et mettons-le en contact

4.2. PREMIER PRINCIPE DE LA THERMODYNAMIQUE 81
avec un bloc de metal froid. Il y a au bout d’un moment, equilibre de la temperature dans lesdeux blocs sans le moindre mouvement macroscopique (les deux blocs deviennent tiedes) : il s’estproduit ce que l’on appelle un transfert de chaleur du bloc chaud vers le bloc froid. Il s’agit, enfait, d’un transfert d’energie du bloc chaud vers le bloc froid. Le mecanisme du transfert est icila conduction de la chaleur.
Puissance calorifique : par definition, c’est la quantite de chaleur fournie au systeme Σconsidere par unite de temps. Dans l’ecriture d’un bilan, on parlera de puissance calorifiquefournie ou recue par le systeme. Notons que cette puissance peut etre positive, negative ou nulle.
Notons aussi, que la chaleur est le produit d’une puissance calorifique par un temps. Lachaleur est une energie.
4.2.5 Premier principe de la thermodynamique
En fait, les domaines de la mecanique et de la thermique ne sont pas cloisonnes, et « dansla vraie vie » il y a combinaison des effets. Dans le domaine de l’energetique, aucun des deuxeffets, mecanique et thermique, n’est negligeable. Rappelons l’experience du paragraphe 4.2.1,ou on a transforme de la chaleur en travail mecanique.
Il y a un principe general traduisant un bilan energetique. Ce principe est connu sous le nomde « Premier principe de la thermodynamique ». Nous allons l’enoncer dans la suite dece paragraphe apres avoir introduit la notion de transformation thermodynamique.
Transformation thermodynamique
On dit aussi processus thermodynamique. Supposons, pour un systeme Σ, un premier etatdit etat initial, et un second etat dit etat final. Il y a plusieurs facons de passer de l’etat initiala l’etat final. Chacune de ces facons est appelee transformation thermodynamique.
Exemple : prenons un gaz contenu dans un ballon avec comme etat initial le ballon de rayonRinitial et comme etat final le ballon de rayon Rfinal avec Rinitial > Rfinal (Fig. 4.8). On peutpasser de l’etat initial a l’etat final, par exemple :
– en refroidissant le ballon (Fig. 4.8),– en inserant le ballon dans un etau et en le comprimant (Fig. 4.8),– en l’inserant dans un etau et en le refroidissant en meme temps.
refroidissement
compression
Fig. 4.8 – Exemples de transformation thermodynamique

82 CHAPITRE 4. ENERGETIQUE
Premier principe de la thermodynamique - Enonce en termes de travail et de chaleur
Soit un systeme Σ ferme, passant d’un premier etat dit initial, a un second etat dit final,alors on a :
(Ecin + Eint)final − (Ecin + Eint)initial = W + Q (4.1)
Ecin : energie cinetique du systeme Σ,Eint : energie interne du systeme Σ,
W : travail des efforts exterieurs appliques a Σ, c’est-a-dire fourni par l’exterieur a Σ pourpasser de l’etat initial a l’etat final.
Q : chaleur fournie par l’exterieur a Σ entre l’etat initial et l’etat final.
Enonce
La variation de l’energie totale du systeme entre l’etat initial et l’etat final, c’est-a-dire(Ecin + Eint)final − (Ecin + Eint)initial est egale a la somme du travail W recu par le systeme etde la chaleur Q recue par le systeme pour passer de l’etat initial a l’etat final.
Cette equation (4.1) traduit le premier principe de la thermodynamique. Il est base sur desobservations experimentales, et jusqu’a present il n’est en contradiction avec aucune observationexperimentale. Naturellement dans (4.1), les quantites W et Q peuvent etre, positives, negativesou nulles.
Remarque importante : on verra sur des exemples que ce principe permet de transformer dutravail en chaleur et vice-versa.
Exemple d’une descente a velo sur un plan incline
Un cycliste se laisse descendre d’une hauteur H, puis freine a fond et s’arrete (Fig. 4.9). Lesysteme considere est le systeme « velo + cycliste ». Sa masse est m.
~g
A
initialH
C B
final
Fig. 4.9 – Le systeme « velo + cycliste »
α – A l’etat initial, le systeme « velo + cycliste » est en A et est au repos. Son energie cinetiqueest nulle. Son energie interne est (Eint)initial.
β – A l’etat final, le systeme « velo + cycliste » est en B et est a nouveau au repos. Son energiecinetique est nulle. Son energie interne est (Eint)final.

4.2. PREMIER PRINCIPE DE LA THERMODYNAMIQUE 83
γ – Le systeme « velo + cycliste » est soumis a la force de pesanteur. Le travail recu par le« velo + cycliste », quand il va de l’etat initial a l’etat final, est le produit de la force depesanteur par la distance parcourue :
(m~g) ·(−→AC +
−−→CB
)= (−m g~ez) ·
(−→AC +
−−→CB
)= (−m g~ez) · (−H ~ez) = m g H
δ – On n’apporte aucune chaleur au systeme « velo + cycliste ».
Le premier principe de la thermodynamique s’ecrit :
(Ecin + Eint)final − (Ecin + Eint)initial = W + Q
soit :(Eint)final − (Eint)initial = m g H + 0(Eint)final − (Eint)initial = m g H
En fait, le caoutchouc des pneus s’est echauffe et il y a eu transfert de l’energie cinetiquequ’avait le systeme « velo + cycliste » pendant sa descente en energie interne.
Premier principe de la thermodynamique - Enonce en termes de puissance
Reprenons le systeme Σ ferme deja introduit dans l’enonce du premier principe en termesde travail et de chaleur. Supposons l’etat final et l’etat initial tres voisins, et posons (Ecin +Eint)final− (Ecin +Eint)initial = ∆(Ecin−Eint). Imaginons que l’on passe de l’etat initial a l’etatfinal pendant le temps ∆t. On a d’apres (4.1) :
∆(Ecin + Eint) = W + Q
ou bien :∆(Ecin + Eint)
∆t=
W
∆t+
Q
∆t
Faisons tendre ∆t vers zero (ce qui revient a introduire la notion de derivee). On pose :
lim∆t→0
∆(Ecin + Eint)∆t
=ddt
(Ecin + Eint),
lim∆t→0
W
∆t= Pext = puissance des efforts exterieurs recue par le systeme Σ,
lim∆t→0
Q
∆t= Pcal = puissance calorifique recue par le systeme Σ.
On a donc :ddt
(Ecin + Eint) = Pext + Pcal (4.2)
Enonce
La variation de l’energie totale du systeme Σ par unite de temps (c’est-a-dire la derivee parrapport au temps de l’energie totale du systeme Σ) est egale a la somme de la puissance desefforts exterieurs recue par Σ et de la puissance calorifique recue par Σ.

84 CHAPITRE 4. ENERGETIQUE
4.3 Dimensions - Unites - Exemples de conversion de l’energie
Dans le paragraphe 4.2, nous avons introduit les notions de travail, chaleur et puissance. Cesgrandeurs sont presentes dans l’enonce du premier principe de la thermodynamique.
– « Travail », « Energie », « Chaleur » sont de memes dimensions et s’expriment avec lesmemes unites (ces grandeurs peuvent etre ajoutees).
– « Puissance » et « Variation par rapport au temps du travail » (ou bien « de l’energie »ou « de la chaleur »), sont de memes dimensions.
– Un travail (ou bien une energie ou de la chaleur) multiplie par un temps est une puissance.
4.3.1 Dimensions
Nous designons par M, L et T les dimensions d’une masse, d’une longueur et du temps.Notations
On introduit la notation suivante :
[grandeur] = dimension de la grandeur
ainsi :
[masse] = M, [longueur] = L, [temps] = T[vitesse] = L/T = LT−1
[acceleration] = L/T2 = LT−2
[force] = M LT−2
[pression] = [force par unite de surface] = M L−1 T−2
[energie cinetique] = [masse multipliee par une vitesse au carre] = M L2 T−2
[travail d’une force] = [force multipliee par une longueur] = M L2 T−2
[travail] = [energie] = [chaleur] = M L2 T−2
[puissance] = M L2 T−1
Une puissance, quelle que soit son origine, a la dimension d’un travail multiplie par un temps.
Remarque : il ne faut pas confondre la notion de « dimension » que nous venons d’introduire etla notion d’« unites » que nous donnons ci-apres.
4.3.2 Unites
Dans le systeme international (systeme SI) d’unites, on a les unites suivantes :
B Masse : kg (kilogramme)B Longueur : m (metre)B Temps : s (seconde)B Force : N (newton) ; 1 N = 1 kg.m.s−2
B Pression : Pa (pascal) ; 1 Pa = 1 N.m−2 = 1 kg.m−1.s−2
B Travail, Energie ou Chaleur : J (joule) ; 1 J = 1 N.m = 1 kg.m2.s−2
B Puissance : W (watt) ; 1 W = 1 J.s−1 = 1 kg.m2.s−3
Autres unites definies pour leur commodite
B Energie : kilowatt-heure (kW.h)
1 kW.h = 3600 kJ = 3.6 ×106 J

4.3. DIMENSIONS - UNITES - EXEMPLES DE CONVERSION DE L’ENERGIE 85
Tab. 4.1 – Prefixes des multiples et sous-multiples decimaux des unites du Systeme International(SI)
Facteur 1018 1015 1012 109 106 103 102 10 1Prefixe exa peta tera giga mega kilo hecto decaSymbole E P T G M k h da
Facteur 1 10−1 10−2 10−3 10−6 10−9 10−12 10−15 10−18
Prefixe deci centi milli micro nano pico femto attoSymbole d c m µ n p f a
C’est l’energie consommee par un fer electrique de 1000 W fonctionnant pendant une heure.La consommation electrique annuelle moyenne par habitant en France est de l’ordre de7000 kW.h. Pour les nombres avec decimales, nous utilisons la notation anglo-saxonne avecun point (3.6 ≡ 3, 6).
B Energie : Tonne equivalent petrole (tep)
1 tep = 1 MW.h = 103 kW.h
B Energie : kilocalorie (kcal) :
1 kcal = 1.2 ×10−3 kW.h = 0.0012 kW.h
C’est l’energie qu’il faut pour elever la temperature de 1 kg d’eau de 1 degre Kelvin (1 K)ou ce qui revient au meme de 1 degre Celsius.
B Puissance : cheval-vapeur ou cheval (cv)
1 cv = 736 W
C’est une ancienne unite de puissance (1 cv correspond a la puissance necessaire pourelever, en une seconde, une masse de 75 kg dans le champ de la pesanteur a 1 m dehauteur : 1 cv = 75× 9.81 kg.m.s−3 = 736 W.
4.3.3 Exemples d’ordre de grandeur pour l’energie
α – Energie cinetique d’un camion de 10 tonnes (104 kg) a 100 km/h (27.78 m.s−1) :
12
104 (27.78)2 J = 3.86× 106 J = 1.07 kW.h
β – Energie due a 10 tonnes d’eau chutant de 40 m. La vitesse de l’eau au bas de la chute estdonnee par la formule de Toricelli (resultat admis), a savoir
√2 g h, g etant l’acceleration
de la pesanteur et h la hauteur de chute. L’energie cherchee est :
12
104 (2× 9.81× 40) J = 3.924× 106 J = 1.09 kW.h
γ – Energie fournie par une eolienne qui met en mouvement 20 000 m3 d’air et lui donne lavitesse de 60 km/h, la masse volumique de l’air etant 1.18 kg/m3 :
12
(1.18× 20 000)(
60 0003600
)2
J = 3.642× 106 J = 1.02 kW.h

86 CHAPITRE 4. ENERGETIQUE
δ – Energie solaire fournie par une heure de soleil sur un capteur de 1 m2, sachant que lapuissance d’un beau « soleil » fournie a 1 m2 est 1 kW :
(1000 W)× (3600 s)= 3.6×106 J = 1 kW.h
ε – Energie thermique de fusion de 10 kg de glace, sachant que la chaleur de fusion de la glaceest 335 kJ/kg dans des conditions standard de pression et temperature :
10×335 kJ = 3.35×106 J = 0.93 kW.h
Donc 1 kW.h est l’energie necessaire a la fusion de 10.75 kg de glace.ϕ – Energie thermique de vaporisation de 1.5 kg d’eau, sachant que la chaleur de vaporisation
de l’eau a la pression atmospherique est 2500 kJ/kg :
1.5×2500 kJ = 3.75×106 J = 1.042 kW.h
Donc 1 kW.h est l’energie necessaire a la vaporisation de 10.44 kg d’eau.
4.3.4 Conversion d’energie - Exemples
Sources d’energie
La seule source d’energie qui soit exterieure a la Terre et utilisable actuellement est le « Soleil ».Le soleil rayonne la puissance de 1.81×1015 W sur la Terre. Ceci correspond a une energie egalea 15.84× 1015 kW.h par an (1.81× 1015 × 365× 24× 3600 W.s = 15.84× 1015 kW.h par an).
Il existe sur terre, des sources d’energie chimique et nucleaire, mais celles-ci sont en quantitelimitee et sont non renouvelees. Il faut cependant remarquer que ces ressources sont considera-bles. Par exemple, le charbon et les hydrocarbures peuvent etre utilises encore pendant deuxsiecles. Les ressources en energie nucleaire quant a elles sont difficilement estimables (d’apresEncyclopedia Universalis).
Notons que l’energie potentielle de l’eau emmagasinee dans les barrages provient de l’evapo-ration de l’eau des oceans sous l’action du rayonnement solaire.
Notons aussi que l’energie chimique du charbon et des hydrocarbures provient de reactionsphotochimiques produites par le rayonnement solaire. On utilise actuellement en quelques siecles,des reserves qui ont mis des milions d’annees a s’accumuler.
Systemes de conversion d’energie
On peut soit transformer l’energie disponible en energie electrique facile a transporter, soittransporter directement la source d’energie (combustible) a l’endroit ou l’energie est utilisee.Donnons deux exemples de conversion d’energie.
a) L’energie hydraulique (c’est-a-dire l’energie potentielle de l’eau accumulee dans des bar-rages) est transformee en « energie cinetique » par ecoulement. Cette derniere est tranformeeen « energie cinetique de rotation » d’un volant grace a une turbine, qui a son tour entraıneun generateur electrique. Le rendement de l’operation est tres bon, de l’ordre de 90%. Il y aseulement quelques pertes dues a la viscosite de l’eau et a des frottements.
b) Lorsque la source d’energie disponible est de type « chimique », la methode la plus utilisee estla combustion (ou il intervient de nombreuses reactions chimiques). L’energie liberee par la com-bustion provoque l’agitation des molecules : l’energie est donc transformee en energie cinetiquemoleculaire (voir paragraphe 2.3), c’est-a-dire en « chaleur ». Cette chaleur est utilisee dans unesource chaude de machine thermique (moteur a explosion par exemple), qui en transforme unepartie en travail mecanique. Ce travail sert ensuite, par exemple, a la propulsion d’un vehicule.Dans ce long processus, le rendement est limite. Le rendement theorique maximal est de l’ordrede 50%. Les rendements reels sont d’environ 25% a 30%.

4.4. TRANSFORMATIONS THERMODYNAMIQUES DE BASE 87
4.4 Transformations thermodynamiques de base
4.4.1 Observation. Variables d’etat. Lois d’etat
Principe zero de la thermodynamique : L’etat d’un corps ne depend pas de son histoire.
Exemple : a la pression de 105 Pa (c’est a peu pres la pression atmospherique moyenne), l’eau a99.5 degres Celsius est liquide, et a 100.5 degres Celsius, l’eau est a l’etat de vapeur, et ceci quelleque soit son histoire. On peut donc decrire l’etat d’un corps a un instant donne, independammentde son histoire.
Quelles sont les variables naturelles, c’est-a-dire les variables qu’il est naturel d’introduire etde mesurer pour decrire l’etat d’un corps ?
On retient usuellement les variables suivantes : la temperature T , la pression p, la masse M ,le volume V ou bien en utilisant la relation M = ρ V , la masse volumique ρ. Ces variables sontappelees variables d’etat.
Par exemple, pour un corps pur et une seule phase, on a deux variables d’etat independantes.En d’autres termes, deux variables d’etat vont permettre de deduire toutes les autres par, ceque l’on appelle, des lois d’etat. Choisissons p et T comme variables d’etat independantes.Considerons la masse M du corps pur considere. Alors, le volume V est donne par une loid’etat de la forme F (p, T, V ) = 0 ou bien en resolvant cette equation pour V par l’equationV = G(p, T ). En utilisant la masse volumique ρ, (c’est-a-dire la masse de l’unite de volume) onecrit la loi d’etat sous la forme f(p, T, ρ) = 0 ou bien ρ = g(p, T ).
Experience de Mariotte (1661)
Cette experience consiste a verser du mercure dans un tube (de section S) tout en laissantune partie emplie d’air. Le tube est d’abord bouche (Fig. 4.10a), puis renverse dans une cuvede mercure ; enfin, on enleve le bouchon (Fig. 4.10b). Les hauteurs d’air h1 et de mercure h2
sont mesurees avant de renverser le tube puis apres l’avoir debouche dans la cuve (les nouvelleshauteurs sont h′1 et h′2). On verifie experimentalement que, a temperature constante, on a :
patm h1 S = (patm − ρmercure g h′2) h′1 S
Remarquons que h1 S et h′1 S sont respectivement les volumes de l’air dans les deux situationsa) et b).Posons p′ = patm− ρmercure g h′2 : c’est la pression de l’air dans le tube dans la situation du tuberenverse (Fig. 4.10b). On a patm h1 S = p′ h′1 S, c’est-a-dire :
p V = cste
ou p est la pression de l’air et V son volume.
Experience de Charles et Gay–Lussac
L’experience realisee par Charles et Gay–Lussac a montre qu’a pression constante, le volumedu gaz est proportionnel a la temperature T (T est la temperature absolue ; son unite est ledegre Kelvin (K)).
Loi d’etat des gaz parfaits
Les deux experiences precedentes conduisent a la loi des gaz parfaits :
p V = MR
MT (4.3)
avec :

88 CHAPITRE 4. ENERGETIQUE
~g
��
��
XXXXXzsection S
bouchon
�J
JJ
JJJ
patm
� -mercure
h1
h2
h′1
h′2
h1
(a) (b)
Fig. 4.10 – Experience de Mariotte
B p : pression du gazB V : volume du gazB T : temperature du gaz (en degre Kelvin)B M : masse du gazB M : masse molaire du gazB R : constante des gaz parfaits
Une mole contient 6.023× 1023 (nombre d’Avogrado) molecules du gaz considere. L’unite pourune mole est notee « mol ». La masse molaire est la masse d’une mole, c’est-a-dire de 6.023×1023
molecules. La masse molaire s’exprime en g/mol. La masse molaire de l’oxygene est 16 g/mol etcelle de l’hydrogene est 1 g/mol.
La constante des gaz parfaits est : R = 8.31447 J.K−1.mol−1.
Loi d’etat des gaz parfaits pour l’unite de masse
Elle s’ecrit :p = r ρ T (4.4)
avec :B p : pression du gazB ρ : masse volumique du gaz (masse de l’unite de volume)B T : temperature du gaz (en kelvin)B r : constante du gaz parfait considere (pour l’air on a : r = 287 J.kg−1.K−1)
Par ailleurs :B v = 1/ρ : volume specifique (volume de l’unite de masse) ou volume massique
On passe de la formule (4.3) a la formule (4.4) en posant M = 1, V = v et r = R/M .
Representation de la surface d’etat
Dans l’espace a trois dimensions rapporte a un triedre orthogonal, on porte sur les troisaxes, la pression p, le volume massique v et la temperature T . La surface d’etat a pour equationp = r ρ T . Elle est representee sur la figure 4.11.

4.4. TRANSFORMATIONS THERMODYNAMIQUES DE BASE 89
pression p
volume massique v
temperature T
Surface d’etat
Fig. 4.11 – Representation de la surface d’etat d’un gaz parfait
Supposons v constant. Alors la relation (4.4) s’ecrit p/T = cste. Dans le plan (p, T ), lescourbes representatives sont des droites (Fig. 4.12) ; naturellement, il y a une droite associee achaque valeur de v.
pression p
0 temperature T
?
droite v = cste
Fig. 4.12 – Representation de la loi d’etat d’un gaz parfait dans le plan (p, T )
Supposons p constant. Alors la relation (4.4) s’ecrit T/v = cste. Dans le plan (v, T ), lescourbes representatives sont des droites (Fig. 4.13) ; naturellement, il y a une droite associee achaque valeur de p.Supposons T constant. Alors la relation (4.4) s’ecrit p v = cste. Dans le plan (p, v), les courbesrepresentatives sont des hyperboles equilateres (Fig. 4.14) ; naturellement, il y a une hyperboleassociee a chaque valeur de T .
Remarque
Tous les gaz ne sont pas des gaz parfaits. Il y a d’autres lois d’etat. Donnons deux exemples :B Loi d’etat d’un gaz de Van der Waals :
p =ρ r T
1− b ρ− a ρ2

90 CHAPITRE 4. ENERGETIQUE
volume massique v
0 temperature T
?
droite p = cste
Fig. 4.13 – Representation de la loi d’etat d’un gaz parfait dans le plan (v, T )
pression p
0 volume massique v
����
temperature T = cste
Fig. 4.14 – Representation de la loi d’etat d’un gaz parfait dans le plan (p, v)
(a et b sont des constantes).B L’eau entre 0 et 4 degres Celsius a un comportement particulier : a pression constante,
quand T diminue, ρ diminue et v augmente. Comme consequence, la glace flotte et lescanalisations qui gelent eclatent.
4.4.2 Relations entre travail, chaleur, energie et variables d’etat pour un gazparfait
Considerons un systeme thermodynamique Σ au repos. Nous voulons evaluer la differenced’energie interne entre deux etats de ce systeme : E2 − E1. Notons que pour alleger l’ecriture,nous ne faisons pas figurer l’indice « int » pour « interne ». L’energie interne E est une variabled’etat (nous l’admettons). Nous rappelons que la difference E2 −E1 cherchee ne depend pas dela transformation thermodynamique effectuee pour passer du premier etat au second. D’apresle premier principe de la thermodynamique (enonce paragraphe 4.2.5), on peut ecrire :
E2 − E1 = W + Q
ou W et Q sont le travail et la chaleur apportes au systeme Σ pour passer de l’etat 1 a l’etat 2.Si le systeme Σ a pour masse, l’unite de masse, on ecrit :
e2 − e1 = w + q

4.4. TRANSFORMATIONS THERMODYNAMIQUES DE BASE 91
B : e energie interne de l’unite de masse,B : w travail recu par l’unite de masse pour passer de l’etat 1 a l’etat 2,B : q chaleur recue par l’unite de masse pour passer de l’etat 1 a l’etat 2.
Remarque importante
Le travail et la chaleur, contrairement a l’energie interne, dependent de la transformationthermodynamique faisant passer de l’etat 1 a l’etat 2. Pour effectuer les calculs, on decomposela transformation reelle (on dit aussi chemin reel) en des transformations (ou chemins) elemen-taires simples, eventuellement fictifs.
Travail des forces de pression associe a une variation de volume
Soit un systeme Σ de masse M fixee et de volume V . Pour une petite variation ∆V duvolume, le travail des forces de pression est :
∆W = −p ∆V
La pression p est positive. Pour diminuer le volume de Σ (∆V < 0), il faut fournir au systemeΣ un travail positif (−p ∆V > 0). Pour augmenter le volume de Σ (∆V > 0), il faut fournir ausysteme Σ un travail negatif (c’est le systeme Σ qui fournit un travail positif a l’exterieur).
Dans la pratique, on utilise le systeme correspondant a l’unite de masse. Avec M = ρ V , larelation precedente s’ecrit :
∆W = −p ∆(
M
ρ
)= −p M ∆
(1ρ
)
∆w = −p ∆(
1ρ
)= −p ∆v (4.5)
avec W = M w (w travail recu par l’unite de masse).
Quantite de chaleur associee a une variation de temperature
Par rapport au calcul du travail des forces de pression precedent, le calcul de la quantite dechaleur fournie au systeme Σ est plus complique. Sachant que pour un gaz, deux variables d’etatsuffisent pour calculer toutes les autres, on cherche a calculer la chaleur associee au changemeutd’une seule variable, l’autre etant constante. Pour les cas qui nous interessent, on envisage soitle couple de variables (p, T ), soit le couple de variables (T, v) ≡ (T, 1/ρ).
Quantite de chaleur : calcul a pression constante
On introduit le coefficient cp (qui s’exprime en J.kg−1.K−1), et qui s’appelle capacite calo-rifique massique a pression constante. C’est la quantite de chaleur necessaire pour eleverla temperature d’une unite de masse d’un corps de 1 kelvin. Cette capacite permet d’ecrire :
∆q = cp ∆T
en raisonnant en chaleur par unite de masse. La valeur de cp depend du gaz, mais aussi de l’etatdu gaz (en general, cp depend de T ), et c’est une grandeur que l’on sait mesurer et tabuler.

92 CHAPITRE 4. ENERGETIQUE
Quantite de chaleur : calcul a volume constant
(masse volumique constante) On introduit le coefficient cv, capacite calorifique massiquea volume constant en J.kg−1.K−1. C’est la quantite de chaleur necessaire pour elever latemperature d’une unite de masse d’un corps de 1 kelvin. Cette capacite permet d’ecrire :
∆q = cv ∆T
La valeur de cv depend du gaz, mais aussi de l’etat du gaz (en general, cv depend de T ), etc’est une grandeur que l’on sait mesurer et tabuler.
Exemples de valeur de cp et de cv :
Capacite calorifique massique cp de l’air sec a 20◦C et sous 105 Pa : 1007 J.kg−1.K−1,Capacite calorifique massique cv de l’air sec a 20◦C : 719 J.kg−1.K−1,Capacite calorifique massique cv de l’helium a 20◦C : 741,98 J.kg−1.K−1,Capacite calorifique massique cp de l’air humide (taux d’humidite de 100) a 20◦C et sous
105 Pa : 1030 J.kg−1.K−1.Rappelons que les capacites calorifiques massiques dependent de la temperature. Nous illus-
trons cette dependance sur la figure 4.15.
20 40 60 80 100
500
400
300
200
100
0
aluminium
titanium
cuivre
or
cp (J.kg−1.K−1)
T (K)
Fig. 4.15 – Capacite calorifique en fonction de la temperature
Remarques
– Les coefficients cp et cv sont toujours positifs (sinon un glacon ferait geler un ocean !).– Pour les liquides et les solides, on peut aussi introduire les capacites calorifiques cp et cv.Mais pour ces milieux, on a des valeurs voisines pour cp et cv. Ainsi pour l’eau cp ≈ cv ≈4180 J.kg−1.K−1.
4.4.3 Transformations thermodynamiques de base, dans le cas d’un gaz par-fait avec cp et cv constants
Un tres grand nombre de gaz usuels (air, azote, CO2, . . . ) peuvent etre consideres commedes gaz parfaits avec des capacites calorifiques massiques cp et cv constantes. De plus, on verifie

4.4. TRANSFORMATIONS THERMODYNAMIQUES DE BASE 93
experimentalement que cp et cv sont positives, que cp est superieure a cv et que cp−cv = r. Pourun gaz parfait, avec cp et cv constants, on a donc :
cp − cv = r ; cp/cv = γ > 1 (4.6)
r est la constante du gaz parfait, et γ le rapport des capacites calorifiques. Le coefficient γ esttoujours superieur a 1. Pour l’air on a : γ = 1.4.
Nous allons montrer comment on peut utiliser la loi des gaz parfaits et les grandeurs « tra-vail », « chaleur », « variables d’etat » pour analyser des transformations thermodynamiques debase. Pour representer ces transformations, on utilise un diagramme (p, T ) et un diagramme(p, 1/ρ). On va calculer des energies internes massiques (par kg de gaz). Suivant la conventioninternationale de la thermodynamique, est compte positif tout ce qui est recu par le gaz, et negatiftout ce qui est fourni par le gaz.
α – Transformation isobare (a pression constante)On prend l’exemple d’un echauffement isobare faisant passer l’unite de masse de l’etat 1a l’etat 2. La temperature T augmente. Pour une telle transformation, on a T2 > T1 (caron a suppose un echauffement) et donc ρ2 < ρ1 (en utilisant p = r ρ T , et l’hypothesep = constante = p1 = p2). Voir la figure 4.16.
1/ρ1 1/ρ2
1/ρ
T1 T2
T
p1 = p2 p1 = p2
p p
1 12 2
Fig. 4.16 – Chemins allant de 1 a 2 dans les plans (p, 1/ρ) et (p, T ) a pression constante
On peut alors calculer les energies echangees :• la quantite de chaleur recue par l’unite de masse du gaz s’obtient a partir de ∆q = cp ∆T :
q ≡ q1→2 =∫
1→2cp dT = cp (T2 − T1) (q est positif : q > 0)
• le travail recu par l’unite de masse du gaz s’obtient a partir de la relation (4.5) : ∆w =−p ∆(1/ρ) :
w ≡ w1→2 = −∫
1→2p d
(1ρ
)= −p1
∫1→2
d(
1ρ
)= −p1
(1ρ2− 1
ρ1
)= −p1
(r
T2
p2− r
T1
p1
)= −p1
(r
T2
p1− r
T1
p1
)= r (T1 − T2) (w est negatif : w < 0)
Le travail se visualise par l’aire grisee dans le diagramme (p, 1/ρ) de la figure 4.16.• la variation d’energie totale par unite de masse est donc :
e2−e1 = w+q = w1→2+q1→2 = r (T1−T2)+cp (T2−T1) = (cp−r) (T2−T1) = cv (T2−T1)
Remarquons que si les deux etats 1 et 2 sont voisins, on aura : ∆e = cv ∆T

94 CHAPITRE 4. ENERGETIQUE
Exercice a traiter par l’etudiant. Nous avons traite le cas d’un rechaufement isobare.A titre d’exercice, traiter de la meme facon le cas d’un refroidissement isobare faisant passerl’unite de masse de l’etat 1 a l’etat 2. Dans ce cas on aura : T2 < T1. Verifier que q1→2 estnegatif et que w1→2 est positif.
β – Transformation a ρ constante (transformation isochore)Prenons l’exemple d’une compression isochore faisant passer l’unite de masse de l’etat 1 al’etat 2. La pression augmente, car on a suppose une compression. Pour cette transforma-tion, on a p2 > p1 et donc T2 > T1 (en utilisant p = r ρ T et l’hypothese ρ = constante).Voir la figure 4.17.
1/ρ1 = 1/ρ2
1/ρ
T1 T2
T
p1 p1
p2 p2
p p
1 1
2 2
Fig. 4.17 – Chemins allant de 1 a 2 dans les plans (p, 1/ρ) et (p, T ) a volume constant (ρ estconstant)
On peut calculer les energies mises en jeu :• le travail w ≡ w1→2 = −
∫1→2 p d (1/ρ) = 0 (le travail des forces de pression est nul, car
ρ est constant).• pour calculer la quantite de chaleur recue par unite de masse du gaz, on utilise ∆q =cv ∆T d’ou :
q ≡ q1→2 =∫
1→2cv dT = cv (T2 − T1)
q est positif.• la variation d’energie totale par unite de masse est :
e2 − e1 = w1→2 + q1→2 = w + q = cv (T2 − T1)
Remarquons que si les deux etats 1 et 2 sont voisins, on aura comme precedemment :
∆e = cv∆T
Exercice a traiter par l’etudiant. Nous avons traite le cas d’une compression isochore.A titre d’exercice, traiter de la meme facon le cas d’une detente isochore faisant passerl’unite de masse de l’etat 1 a l’etat 2. Dans ce cas on aura : p2 < p1. Verifier que w1→2 = 0et que q1→2 est negatif.
γ – Transformation isobare + transformation isochore : variation d’energie interneentre deux etats quelconquesNous avons montre que ∆e = cv ∆T pour un chemin isobare et aussi pour un cheminisochore. Prenons alors deux etats quelconques 1 et 2 sur la surface d’etat, c’est-a-dire telsque :
Etat 1 : p1, ρ1, T1 avec p1 = r ρ1 T1
Etat 2 : p2, ρ2, T2 avec p2 = r ρ2 T2

4.4. TRANSFORMATIONS THERMODYNAMIQUES DE BASE 95
On peut introduire un chemin fictif allant de l’etat 1 a l’etat 2 compose d’une transforma-tion isobare (de 1 a 1′) et d’une transformation isochore (de 1′ a 2) (voir ces chemins surla figure 4.18). On a :
e1′ − e1 = cv (T1′ − T1) ; e2 − e1′ = cv (T2 − T1′)
et donce2 − e1 = cv (T2 − T1)
1/ρ1 1/ρ2
1/ρ
p1
p2
p
1 1′
2
Fig. 4.18 – Chemins isobare et isochore joignant les etats 1et 2
Si la meme idee est utilisee entre deux etats 1 et 2 voisins, on aura comme precedemment :
∆e = cv ∆T
Conclusion
Entre deux etats 1 et 2, on a toujours :
e2 − e1 = cv (T2 − T1) (4.7)
et entre deux etats voisins quelconques, on a :
∆e = cv ∆T
δ – Transformation isotherme (transformation a temperature constante)Prenons l’exemple d’une detente isotherme faisant passer l’unite de masse de l’etat 1 al’etat 2. La pression diminue. Pour cette transformation, on a p2 < p1 d’ou ρ2 < ρ1 (enutilisant p = r ρ T et l’hypothese T = cste) (voir la figure 4.19).On peut calculer les energies mises en jeu :• le travail est donne par :
w ≡ w1→2 = −∫
1→2p d
(1ρ
)= −
∫1→2
r ρ T d(
1ρ
)= −r T
∫1→2
ρ d(
1ρ
)= −r T
∫1→2
ρ
(−1ρ2
)dρ = r T
∫1→2
ρ−1 dρ
= r T (ln(ρ2)− ln(ρ1)) = r T lnρ2
ρ1
Comme ρ2 < ρ1, on a w < 0 (le travail des forces de pression est negatif).

96 CHAPITRE 4. ENERGETIQUE
1/ρ1 1/ρ2
1/ρ
T2 = T1
T
p2 p2
p1 p1
p p
1 1
2 2
Fig. 4.19 – Chemins allant de 1 a 2 dans les plans (p, 1/ρ) et (p, T ) a temperature constante
• la variation d’energie interne par unite de masse est d’apres la relation (4.7) etablieprecedemment :
e2 − e1 = cv (T2 − T1) = 0
car ici T2 = T1.La chaleur recue par unite de masse passant de l’etat 1 a l’etat 2 est telle que : e2 − e1 =w1→2 + q1→2 = 0, soit q1→2 = −w1→2. La chaleur recue par l’unite de masse est positive.
Exercice a traiter par l’etudiant. Nous avons traite le cas d’une detente isotherme.A titre d’exercice, traiter de la meme facon le cas d’une compression isotherme faisantpasser l’unite de masse de l’etat 1 a l’etat 2. Dans ce cas on aura : p2 > p1. Verifier quew1→2 est positif, et que q1→2 est negatif.
ε – Transformation adiabatique reversibleDefinition : une transformation est dite adiabatique si la chaleur recue par le systemeconsidere est egale a 0.Pour un gaz a chaleurs calorifiques constantes, on verifie experimentalement que dans unetransformation adiabatique, on a :
p
ργ= K1 (4.8)
ou K1 est une constante. Cette loi est verifiee experimentalement. Nous l’admettons dansce cours.De la relation (4.8) et de la loi des gaz parfaits p = r ρ T , on deduit :
ρ1−γ T = K2 ; p1−γ T γ = K3
ou K2 et K3 sont des constantes. En effet :
K1 =p
ργ=
r ρ T
ργ= r ρ1−γ T soit ρ1−γ T =
K1
r≡ K2 = cste
K1 =p
ργ= p
(r T
p
)γ
= p1−γ T γ rγ soit p1−γ T γ =K1
rγ≡ K3 = cste
Considerons une detente adiabatique faisant passer l’unite de masse de l’etat 1 a l’etat2. La pression diminue. On a p2 < p1. D’ou : p1−γ
2 T γ2 = p1−γ
1 T γ1 = K3. Il vient : T2 =
T1 (p2/p1)(γ−1)/γ et donc T2 < T1.Sur la figure 4.20, les courbes dessinees sont representatives, a gauche de l’expression(4.8) c’est-a-dire p = K1 ργ , et a droite de l’expression p1−γ T γ = K3 c’est-a-dire p =T γ/(γ−1) K
−1/(γ−1)3 .

4.5. TRANSFORMATIONS DANS UN TURBO-PROPULSEUR 97
1/ρ1 1/ρ2
1/ρ
T2 T1
T
p2p2
p1p1
p p
1 1
2 2
Fig. 4.20 – Chemins allant de 1 a 2 dans les plans (p, 1/ρ) a et (p, T )
On peut alors calculer les energies recues par l’unite de masse au cours de la transformationallant de 1 a 2. Comme la transformation est adiabatique, tout au long de la transformationon a p/ργ = K1, et aussi p1/ργ
1 = p2/ργ2 = K1.
• le travail est :
w ≡ w1→2 = −∫
1→2p d
(1ρ
)= −
∫1→2
K1 ργ d(
1ρ
)= −
∫1→2
K1 ργ −1ρ2
dρ
= K1
∫1→2
ργ−2 dρ = K1ργ−12 − ργ−1
1
γ − 1
=1
γ − 1
(p2
ργ2
ργ−12 − p1
ργ1
ργ−11
)=
1γ − 1
(p2
ρ2− p1
ρ1
)=
1γ − 1
(r T2 − r T1) =r
γ − 1(T2 − T1)
= cv (T2 − T1)
On a utilise (4.6) pour remplacer r/(γ− 1) par cv. Comme T2 < T1, w est negatif (w < 0).• La transformation etant adiabatique, on a : q ≡ q1→2 = 0• La variation d’energie interne par unite de masse est e2 − e1 = w1→2 + q1→2 = w + q,soit :
e2 − e1 = cv (T2 − T1)
Si les deux etats 1 et 2 voisins, remarquons que l’on a encore la relation (4.7) : ∆e = cv ∆T .
Exercice a traiter par l’etudiant. Nous avons traite le cas d’une detente adiabatique.A titre d’exercice, traiter de la meme facon le cas d’une compression adiabatique faisantpasser l’unite de masse de l’etat 1 a l’etat 2. Dans ce cas on aura : p2 > p1. Verifier quew1→2 est positif.
4.5 Transformations dans un turbo-propulseur
Rappelons le fonctionnement tres schematique d’un turbo-propulseur (voir paragraphe 4.1).Nous le representons sur la figure 4.21.
4.5.1 Transformations dans un turbo-propulseur
Suivons une particule de gaz (air) qui entre dans le turbo-propu1seur. Cette particule va subirune serie de transformations. Au depart, elle est a la pression et a la temperature de l’atmosphere

98 CHAPITRE 4. ENERGETIQUE
1 2 3 4 1
? ?
air exterieur air exterieur
? ? ?
compression combustion turbine
Fig. 4.21 – Fonctionnement schematique d’un turbo-propulseur
ambiante (a une altitude donnee), et elle a la masse volumique correspondante donnee par la loid’etat. Elle est alors dans l’etat 1. Elle entre ensuite dans la chambre de compression et, aprescompression, elle est dans l’etat 2. La combustion a lieu et apres cette phase, la particule fluideest dans l’etat 3. Elle penetre ensuite dans la turbine ou elle est dans l’etat 4. Enfin elle sort dela turbine et se trouve a l’exterieur du turbo-propulseur dans l’etat 1. Dans les plans (p, 1/ρ) et(p, T ), on a dessine successivement les chemins 1 → 2 puis 2 → 3, 3 → 4 et enfin 4 → 1 (Fig.4.22).
p p
p2 p2
p1 p1
2 23 3
1 14 41/ρ T
Fig. 4.22 – Cycle de fonctionnement ideal dans un turbo-propulseur
α – Compression : passage 1→ 2Dans le compresseur, l’air est comprime. On va supposer dans un premier temps quecette compression s’effectue de facon adiabatique reversible (sans echange de chaleur avecl’exterieur). La pression augmente. On decrit donc cette transformation a l’aide de larelation p/ργ = cste, valable pour un gaz parfait avec cp et cv constants, (conditionsverifiees pour l’air dans une gamme de temperature pas trop grande avec γ = 1.4). On aaussi p1−γ T γ = cste en utilisant la loi d’etat des gaz parfaits (voir paragraphe 4.4.3.ε). Surla figure 4.22, le chemin 1→ 2 correspond a une compression adiabatique (p2 > p1).
β – Combustion : passage 2→ 3Dans la chambre de combustion, l’air melange au carburant subit ensuite un echauffementbrutal (combustion) que l’on decrira comme une transformation a pression constante (iso-bare) p = cste. Sur la figure 4.22, cette transformation correspond aux chemins 2 → 3dans les plans (p, 1/ρ) et (p, T ).
γ – Passage dans la turbine : passage 3→ 4Le gaz (air + gaz brules) se detend en faisant tourner la turbine ; on considere quecette transformation est egalement adiabatique reversible (sans echange de chaleur avec

4.5. TRANSFORMATIONS DANS UN TURBO-PROPULSEUR 99
l’exterieur). Il s’agit ici d’une detente. La pression diminue ainsi que la temperature, sui-vant la relation p1−γ T γ = cste. Cette transformation adiabatique correspond aux chemins3→ 4 dans les plans (p, 1/ρ) et (p, T ) (Fig. 4.22) et ils sont similaires a ceux decrits dansle paragraphe 4.4.3.ε precedent.
δ – Refroidissement isobare dans l’air exterieur et ralentissement : passage 4→ 1La temperature du gaz a la sortie de la turbine est encore superieure a la temperatureatmospherique. Il y a alors refroidissement isobare, par contact avec le voisinage (le gazsortant chauffe l’atmosphere environnante). Par ailleurs, le gaz sort avec une vitesse nonnulle, donc avec une certaine energie cinetique, et il subit un ralentissement avant d’etreau repos dans l’etat 1. Cette transformation correspond aux chemins 4→ 1 dans les plans(p, 1/ρ) et (p, T ) de la figure 4.22.La representation de cette succession de transformations dans les plans (p, 1/ρ) et (p, T )est appelee cycle. Ce cycle ideal est appele cycle de Joule ou cycle de Brayton.
4.5.2 Calcul des energies mises en jeu dans chaque transformation
On va calculer des energies massiques (par kg de gaz). On rappelle que, suivant la conventioninternationale de la thermodynamique, est compte positif tout ce qui est recu par le gaz, et negatiftout ce qui est fourni par le gaz.
1. Calcul du travail recu par la particule de gaz au cours de la compression 1→ 2Au cours de cette compression adiabatique, on a (voir paragraphe 4.4.3.ε) : w1→2 = cv (T2−T1) ; on a w1→2 > 0. D’autre part, la transformation etant adiabatique, on a : q1→2 = 0.
2. Calcul de la quantite de chaleur recue par la particule de gaz au cours de la combustion2→ 3La transformation 2 → 3 est une transformation isobare. Comme dans le paragraphe4.4.3.α, on a :
q2→3 = cp (T3 − T2) (4.9)
avec ici q2→3 > 0 (le gaz est plus chaud apres la combustion). Durant la combustion(isobare), le travail recu (negatif) est : w2→3 = r (T2 − T3) avec w2→3 < 0.
3. Calcul du travail recu par la particule durant la detente adiabatique dans la turbine 3→ 4On a (voir paragraphe 4.4.3.ε) : w3→4 = cv (T4 − T3) avec ici w3→4 < 0. Par ailleurs on a :q3→4 = 0.
4. Calcul de la quantite de chaleur recue par le gaz a la sortie du turbo-propulseur 4→ 1Cette chaleur est en fait « offerte » a l’atmosphere. En effet, le gaz est refroidi dans latransformation 4 → 1. On a, la transformation etant isobare, (voir paragraphe 4.4.3.α) :q4→1 = cp (T1 − T4) avec q4→1 < 0 et w4→1 = r (T4 − T1) et w4→1 > 0.En utilisant la relation cv + r = cp (voir (4.6)), on verifie le premier principe, c’est-a-dire :
(w1→2 + q1→2) + (w2→3 + q2→3) + (w3→4 + q3→4) + (w4→1 + q4→1) = 0
car :
[cv (T2 − T1) + 0] + [r (T2 − T3) + cp (T3 − T2)]+[cv (T4 − T3) + 0] + [r (T4 − T1) + cp (T1 − T4)]
= T1 (−cv − r + cp) + T2 (cv + r − cp) + T3 (−cv − r + cp) + T4 (cv + r − cp) = 0
La particule de gaz effectue un cycle ideal.

100 CHAPITRE 4. ENERGETIQUE
4.5.3 Calcul du travail que doit fournir le compresseur
Dans le paragraphe 4.5.2, on a etudie le changement d’etat de la particule de gaz entre sonentree et sa sortie du compresseur : la particule de gaz passe de l’etat 1 a l’etat 2. On a trouveque w1→2 = cv (T2 − T1), (w1→2 > 0). En tenant compte du fait que q1→2 = 0, on verifie bienque e2− e1 = cv (T2−T1) (qui est toujours vrai lorsqu’on considere le gaz comme un gaz parfaita capacites calorifiques constantes). Donc le travail que doit fournir le compresseur est au moinsegal au travail necessaire pour que le gaz change d’etat.
En fait, le travail a fournir est superieur, car il faut en plus faire avancer le gaz de l’entreevers la sortie, contre un gradient de pression defavorable puisque p2 > p1.
Examinons ce qui se passe dans le compresseur. On considere comme systeme Σ, lamasse m de gaz qui va entrer dans le compresseur, etre comprime et sortir du compresseur. Lesconditions a l’entree du compresseur sont fixees par la donnee de p1 et T1. Par la loi p1 = r ρ1 T1,on en deduit la valeur de ρ1. Le volume du gaz V1 entrant dans le compresseur est tel quem = ρ1 V1.
Les conditions a l’entree du compresseur sont donc p1, ρ1, T1.Les conditions a la sortie du compresseur sont p2, ρ2, T2, et sont fixees par la donnee de p2.
Avec p2 = r ρ2 T2 et sachant que la transformation dans le compresseur est supposee adiabatique(la relation (4.8) est verifiee), on peut calculer p2 et T2. En effet de p2 = r ρ2 T2 et de p2/ργ
2 =K1 = p1/ργ
1 , on deduit ρ2 et T2 en fonction de p2 et de l’etat 1 :
ρ2 = ρ1
(p2
p1
)(1/γ)
et T2 =p2
r ρ2=
p2
r ρ1
(p2
p1
)(1/γ)
La masse du gaz sortant du compresseur est toujours m, et son volume V2 est tel que :m = ρ2 V2.
Le travail des forces de pression qui agissent sur le systeme Σ de masse m lors de son passagea travers le compresseur (c’est-a-dire pendant son avancement contre le gradient de pressionimpose), est :
Wpression = p1 V1 − p2 V2 =p1
ρ1m− p2
ρ2m
En effet, le systeme Σ de masse m recoit du travail quand le gaz entre dans le compresseur, eten perd quand il sort du compresseur (en sortant le gaz fournit du travail a l’exterieur).
Par unite de masse on a :
wpression =p1
ρ1− p2
ρ2= r (T1 − T2)
wpression est negatif : le gaz fournit du travail a l’exterieur.On note Wcompresseur le travail total fourni par le compresseur au systeme considere. Par le
premier principe, on a pour le systeme Σ de masse m :
E2 − E1 = Wcompresseur + Wpression
En effet, il n’y a pas d’apport de chaleur car la transformation est adiabatique.Par unite de masse, et sachant que Wcompresseur = m wcompresseur, on a donc :
e2 − e1 = wcompresseur + wpression
Par ailleurs, d’apres (4.7) :e2 − e1 = cv (T2 − T1)

4.5. TRANSFORMATIONS DANS UN TURBO-PROPULSEUR 101
d’ou :
wcompresseur = e2 − e1 − wpression = cv (T2 − T1)− r (T1 − T2) = (cv + r) (T2 − T1)wcompresseur = cp (T2 − T1)
C’est le travail total qui doit etre fourni au gaz par le compresseur. Il est positif.
4.5.4 Puissance mecanique recuperee sur l’arbre
Comme precedemment, on peut calculer le travail recupere au passage de la turbine. Pourune masse m de gaz, il y a non seulement le changement d’etat, mais en plus l’avancement dugaz dans la turbine, cette fois avec une difference de pression favorable : p4 < p3.
Pour la masse m de gaz, son volume passe de V3 (entree de la turbine avec les grandeurs p3,ρ3, T3) a V4 (sortie de la turbine avec les grandeurs p4, ρ4, T4)). Le travail des forces de pressionqui agissent sur le systeme Σ de gaz de masse m lors de son passage dans la turbine est :
Wpression = p3 V3 − p4 V4 =(
p3
ρ3− p4
ρ4
)m = r (T3 − T4) m
Pour l’unite de masse on a donc :
wpression = r (T3 − T4)
On note Wturbine, le travail total fourni au systeme Σ considere. Par le premier principe, ona pour le systeme Σ de masse m :
E4 − E3 = Wturbine + Wpression
En effet, il n’y a pas d’apport de chaleur car la transformation est adiabatique.Par unite de masse, et sachant que Wturbine = m wturbine, on a donc :
e4 − e3 = wturbine + wpression
Par ailleurs, d’apres (4.7) :e4 − e3 = cv (T4 − T3)
Il vient :
wturbine = e4 − e3 − wpression = cv (T4 − T3)− r (T3 − T4) = (cv + r) (T4 − T3) = cp (T4 − T3)
d’ou :wturbine = cp (T4 − T3)
C’est le travail total par unite de masse recu par le gaz ; il est negatif. Le travail wturbine
fourni par le gaz a l’arbre de la turbine est donc positif.Le travail « net » recu par l’unite de masse de gaz est donc :
wnet = wturbine + wcompresseur = cp (T4 − T3) + cp (T2 − T1) = cp (T2 − T1 + T4 − T3) (4.10)
Si on veut effectivement que l’ensemble du turbo-propulseur conduise a un travail recuperea la sortie du turbo-propulseur positif, (travail recupere sur l’arbre), il est necessaire que wnet
soit negatif. Nous supposons dans ce qui suit qu’il en est ainsi.On multiplie par le debit massique dm/dt, qui est la quantite de gaz traversant le moteur
par unite de temps, pour avoir la puissance recuperee sur l’arbre suite au fonctionnement duturbo-propulseur. Elle vaut :
P = |wnet|dm
dt(4.11)
N.B. - Pour les turbo-propulseurs, la puissance est souvent exprimee en chevaux (chevaux va-peur). On rappelle que 1 cv = 736 W.

102 CHAPITRE 4. ENERGETIQUE
4.6 Rendement d’un turbo-propulseur - Cycles reels
4.6.1 Calcul du rendement thermodynamique du turbo-propulseur
Definition
Pour le cycle decrit dans le paragraphe 4.5, le rendement η est defini de la facon suivante :
η =gain
depense=|wnet|q2→3
ou |wnet| est le travail fourni a l’arbre par l’unite de masse de gaz, suite a son parcours dansle turbo-propulseur, et q2→3 la chaleur recue par l’unite de masse de gaz dans l’etape de lacombustion. D’apres (4.9) et (4.10) on a :
η =|cp (T2 − T1 + T4 − T3)|
cp (T3 − T2)= −(T2 − T1 + T4 − T3)
(T3 − T2)
car wnet est negatif. En conclusion :
η = 1− (T4 − T1)(T3 − T2)
(4.12)
On rappelle que les etapes 1→ 2 et 3→ 4 sont adiabatiques (voir V.3 ε) d’ou :
p1−γ1 T γ
1 = p1−γ2 T γ
2 et p1−γ3 T γ
3 = p1−γ4 T γ
4
On deduit :
T1 = T2
(p2
p1
)(1−γ)/γ
et T4 = T3
(p3
p4
)(1−γ)/γ
Mais p3 = p2 et p1 = p4. Alors il vient :
T4 = T3
(p2
p1
)(1−γ)/γ
L’expression pour η devient donc :
η = 1− (T3 − T2) (p2/p1)(1−γ)/γ
(T3 − T2)
η = 1−(
p2
p1
)(1−γ)/γ
(4.13)
On voit que le rendement fait intervenir le taux de compression p2/p1.Dans le graphe de la figure 4.23, nous donnons η en fonction de p2/p1.
Remarques
Le rendement η croıt avec p2/p1 car (1−γ)/γ est negatif (on rappelle que γ est toujours plusgrand que 1 et que sa valeur est 1.4 pour l’air). En effet, quand p2/p1 augmente, (p2/p1)(1−γ)/γ
diminue et η augmente.Par exemple pour p2/p1 = 8, on trouve η = 0.45.

4.6. RENDEMENT D’UN TURBO-PROPULSEUR - CYCLES REELS 103
-0,5
0
0,5
1
1 10 100
η
p2/p1
Fig. 4.23 – Le rendement η en fonction du taux de compression p2/p1
4.6.2 Cycles reels
Une des caracteristiques du cycle ideal ou cycle de Brayton est que le travail utilise pourfaire tourner le compresseur represente une part importante du travail delivre par la turbine.
Dans un cycle reel, les transformations 1→ 2 et 3→ 4 ne sont pas reellement adiabatiqueset ne sont pas reversibles : il y a des pertes par conduction de la chaleur et par viscosite. Dememe la transformation 2 → 3 n’est pas exactement isobare. De tout ceci, il va resulter untravail recupere sur l’arbre qui sera inferieur au travail calcule sur le cycle ideal.
D’autre part, comme le travail utilise pour faire tourner le compresseur represente une partimportante du travail delivre par la turbine, on peut arriver rapidement dans le cas d’un cyclereel, a une situation extreme ou la turbine ne sert plus qu’a entraıner le compresseur (et plusdu tout a entraıner l’helice).
Il est possible de « corriger » les calculs faits precedemment et de calculer un rendement plusproche de la realite experimentale. Ceci est fait dans des cours plus avances.
4.6.3 Ordres de grandeur pour des turbo-propulseurs industriels
Lorsque l’on fournit les caracteristiques d’un turbo-propulseur on indique essentiellement sapuissance maximale sur l’arbre en chevaux vapeur (ou en « SHP » pour « shaft horse power »),sachant que 1 cv = 736 W.Donnons pour finir quelques exemples de turbo-propulseurs et leur puissance :
– Turbo-propulseur AiResearch TPE 331 - l0UA- 511 G : 1000 cv.– Turbo-propulseurs PT6 de Pratt et Whitney - Canada. La famille des turbo-propulseurs
PT6 represente, dans sa categorie, le moteur le plus vendu du monde, avec plus de 32 000 moteursproduits (au 14 octobre 2004). La gamme de puissance va de 580 cv a 2000 cv sur l’arbre. Lepremier moteur PT6 date de 1964. A la date d’aujourd’hui, la famille PT6 compte plus de 260millions d’heures de fonctionnement. Pratt et Whitney - Canada est un leader mondial parmiles motoristes equipant les avions d’affaire, les appareils de l’aviation generale, les avions detransport, et les helicopteres.
– Turbo-propulseur TP400-D6 (qui equipera le futur avion militaire europeen A400M. C’estun moteur triple corps de 11 000 cv. Quatre motoristes sont en charge de la conception, dudeveloppement, et de la production du TP400-D6 : SNECMA moteurs (France), Rolls-Royce

104 CHAPITRE 4. ENERGETIQUE
(Grande-Bretagne), MTU Aeroengines (Allemagne), ITP (Industria de Turbo-Propulsores - Es-pagne). Le calendrier prevoit la livraison de 1’A400M a partir de 2009.
Les turbo-propulseurs sont moins bruyants, et consomment moins de kerosene qu’un turbo-reacteur. Ils sont utilises pour la propulsion des avions a faible vitesse (c’est-a-dire inferieure a750 km/h).

4.7. EXERCICES AVEC CORRECTION 105
4.7 Exercices avec correction
Objectif. Les exercices avec corriges presentes ci-apres sont des applications directes du cours,et en illustrent plusieurs aspects.
4.7.1 Exercice 1 : Transfert et conversion d’energie
On se propose d’etudier le cas d’un gaz enferme entre les parois d’un recipient et un pistonde masse negligeable sur lequel repose une masse M . Le systeme est initialement a l’equilibreet sa temperature est notee T1. Enfin on suppose que les contacts entre le piston et le recipientse font sans frottement et restent hermetiques tout au long de l’etude. On note S la surfacedu piston. Les experiences decrites ci-apres sont realisees dans le champ de la pesanteur avec~g = −g ~ez (Fig. 4.24). On notera patm la pression atmospherique ambiante.
z
~g
?
masse M
?
masse M2
gaz gaz
���*
flamme
(a) (b)
Fig. 4.24 – Exercice 1 : Transfert et conversion d’energie
1) Premiere experienceOn chauffe le gaz pendant un certain temps (Fig. 4.24a). Considerons l’equilibre du pistonseul dans ses positions d’equilibre initiale et finale. On note 1 et 2 respectivement l’etatinitial et l’etat final. Determiner la pression p2. Que peut-on dire sur T2 ? Que peut-on diresur ρ2 ?Le gaz etant dans l’etat final avec p2, ρ2 et T2, on laisse le gaz se refroidir pour revenir ala temperature T1. Le piston revient-il a sa position initiale ?
2) Deuxieme experienceOn reprend le gaz dans l’etat initial avec p1, ρ1 et T1. On remplace les parois du recipientpar des parois adiabatiques, c’est-a-dire empechant tout transfert de chaleur. On veutenfoncer le piston, lui aussi adiabatique, en augmentant la masse qu’il supporte (Fig.4.24b). Celle-ci prend la valeur M2.Que se passe t-il pour le gaz ?
Corrige
1) Etat initial : le piston est en equilibre sous l’effet de trois forces :

106 CHAPITRE 4. ENERGETIQUE
poids de la masse posee sur le piston : M~g = −M g~ez,efforts de pression de l’air exterieur sur le piston : −patm S ~ez,
efforts de pression de l’air contenu dans le recipient : p1 S ~ez.D’ou :
−patm S + p1 S −M g = 0 ⇒ p1 − patm =M
Sg
Etat final : on note p2 la pression de l’air dans le recipient. Le piston est en equilibre sousl’effet de trois forces :
poids de la masse posee sur le piston : M ~g = −M g~ez,efforts de pression de l’air exterieur sur le piston : −patm S ~ez,
efforts de pression de l’air contenu dans le recipient : p2 S ~ez.
D’ou :p2 − patm =
M
Sg
En conclusion on a : p2 = p1.L’air est considere comme un gaz parfait donc : p1 = r ρ1 T1 et p2 = r ρ2 T2. On en deduitque ρ1 T1 = ρ2 T2. La temperature T2 est superieure a T1 (on a chauffe le gaz du recipient),donc ρ2 < ρ1.Maintenant le gaz est refroidi et revient a la temperature T1. La transformation estreversible, et il n’y a aucune perte. Le gaz revient a son etat initial (p1, ρ1, T1).
2) Etat initial : le piston est en equilibre sous l’effet de trois forces, comme dans l’etat initialde la question precedente. D’ou :
p1 − patm =M
Sg
Etat final : dans l’etat final, on note p2 la pression de l’air dans le recipient. Le pistonest en equilibre sous l’effet des trois forces :
poids de la masse posee sur le piston : −M2 g ~ez,efforts de pression de l’air exterieur sur le piston : −patm S ~ez,
efforts de pression de l’air contenu dans le recipient : p2 S ~ez.
D’ou :p2 − patm =
M2
Sg
En conclusion on a :p2 = p1 +
M2 −M
Sg
La pression p2 est plus grande que p1. Par unite de masse, le travail et la chaleur recus parle gaz sont, avec les notations du cours :
w1→2 ; q1→2
La transformation 1→ 2 est adiabatique, donc q1→2 = 0. Donc d’apres le cours :
e2 − e1 = cv (T2 − T1) = w1→2 + q1→2 = w1→2
Le gaz est un gaz parfait donc p1 = r ρ1 T1 et p2 = r ρ2 T2. La transformation 1 → 2 estadiabatique. Par suite on a : p1/ρ1
γ = p2/ρ2γ (voir paragraphe 4.4, formule (4.8)). Donc :
p2
p1=
(ρ1
ρ2
)γ
=ρ2 T2
ρ1 T1et
T2
T1=
(ρ1
ρ2
)γ−1
En conclusion on a :
p2 − p1 > 0 ; ρ2 − ρ1 < 0 ; T2 − T1 > 0

4.7. EXERCICES AVEC CORRECTION 107
4.7.2 Exercice 2 : Loi d’etat
Un diagramme d’Amagat (Emile Hilaire Amagat (1841–1915)) est un moyen de representerles courbes isothermes d’un gaz. Il s’agit de tracer, a T constante, le rapport pression sur massevolumique en fonction de la pression (p/ρ = f(p)), ou f(p) est une fonction de p. Un exemplede ce type de diagramme est donne sur la figure 4.25a pour du dioxyde de carbone (CO2). Dansle cas des faibles pressions, les isothermes d’Amagat sont des droites et sont representees sur lafigure 4.25b.
0,04
0,06
0,08
0,10
0,12
0,14
0 1 2 3
300 K
400 K
500 K
600 K
700 K
0,04
0,06
0,08
0,10
0,12
0,14
0 0,2 0,4
300 K
400 K
500 K
600 K
700 K
p/ρ (MPa.kg−1.m3) p/ρ (MPa.kg−1.m3)(CO2) (CO2)
p (MPa) p (MPa)(a) (b)
Fig. 4.25 – Exercice 2 : Diagramme d’Amagat
1. Pour les faibles pressions, parmi les cinq isothermes du diagramme d’Amagat (Fig. 4.25b),peut-on dire (et justifier) a quelles temperatures, le dioxyde de carbone a un comportementproche de celui d’un gaz parfait.
2. Toujours pour des pressions faibles, on considere un autre gaz reel , ayant une loi d’etatsemblable au dioxyde de carbone. On a mesure les differents etats suivants :
Etat 1 : p = 105 Pa, ρ = 1.30 kg.m−3, T = 273.15 K,
Etat 2 : p = 2× 105 Pa, ρ = 2.65 kg.m−3, T = 273.15 K,
Etat 3 : p = 2× 105 Pa, ρ = 2.16 kg.m−3, T = Θ,
Etat 4 : p = 1× 105 Pa, ρ = 1.06 kg.m−3, T = Θ.
Placer les etats 1, 2, 3 et 4 sur le diagramme d’Amagat. Tracer sur ce meme diagrammeles isothermes T = 273.15 K et T = Θ.
Corrige
1. Un gaz parfait verifie la loi des gaz parfaits : p = r ρ T . Si T = cste, alors p/ρ = cste. Lacourbe representative de la fonction p/ρ en fonction de ρ est alors une parallele a l’axe desabscisses. Pour des temperatures de l’ordre de 600 K a 700 K les droites dessinees sur lafigure 4.25b sont paralleles a l’axe des abscisses. En conclusion, pour des temperatures del’ordre de 600 K a 700 K, le dioxyde de carbonne se comporte comme un gaz parfait.

108 CHAPITRE 4. ENERGETIQUE
2. Pour les quatre etats donnes, on calcule p/ρ. Il vient :
Etat 1 : p = 105 Pa, p/ρ = 0.769 105 Pa.kg−1.m3 avec T = 273.15 K,
Etat 2 : p = 2× 105 Pa, p/ρ = 0.755 105 Pa.kg−1.m3 avec T = 273.15 K,
Etat 3 : p = 2× 105 Pa, p/ρ = 0.926 105 Pa.kg−1.m3 avec T = Θ,
Etat 4 : p = 1× 105 Pa, p/ρ = 0.943 105 Pa.kg−1.m3 avec T = Θ.
Ces quatre points sont places sur le diagramme d’Amagat (Fig. 4.26). Les isothermesT = 273.15 K et T = Θ sont les droites joignant les points 1 et 2 d’une part et 3 et 4d’autre part.
T = Θ
0,07
0,08
0,09
0,10
0 0,1 0,2
0,0769
0,0755
0,0926
0,0943
T = 273,15 K
43
21
p/ρ (MPa.kg−1.m3)
p (MPa)
Fig. 4.26 – Exercice 2 : Points 1, 2, 3, 4
4.7.3 Exercice 3 : Transformations thermodynamiques
On considere un gaz parfait a capacites calorifiques cv et cp constantes. Une masse m de ce gazest contenu dans un volume V a l’aide d’un piston. On realise quatre experiences correspondantaux quatre transformations thermodynamiques suivantes :
– Experience 1 : la transformation est isochore (c’est-a-dire a volume constant).– Experience 2 : la transformation est isobare (c’est-a-dire a pression constante).– Experience 3 : la transformation est adiabatique reversible (c’est-a-dire sans echange de
chaleur avec l’exterieur).– Experience 4 : la transformation est isotherme (c’est-a-dire a temperature constante).Pour chacune de ces experiences, on passe d’un etat 1 (initial) a un etat 2 (final). En
considerant l’unite de masse, et pour chacune d’elles, donner : ∆e = e2 − e1, q1→2 et w1→2.
Corrige
Sur les quatre figures qui suivent, on a represente les quatre experiences.Les resultats demandes sont donnes sur les figures. Ces resultats sont, en fait, ceux obtenus
dans le paragraphe 4.4.3 du cours.

4.7. EXERCICES AVEC CORRECTION 109
Transformation isochore (volume constant) ρ1 = ρ2
e2 − e1 = cv (T2 − T1)
w1→2 = 0
q1→2 = cv (T2 − T1)
V
echauffement
Compression isochore(p et T augmentent)
Fig. 4.27 – Exercice 3 : Transformation isochore
Transformation isobare (pression constante) p1 = p2
e2 − e1 = cv (T2 − T1)
w1→2 = −p1 (v2 − v1)= r (T1 − T2)
q1→2 = cp (T2 − T1)p = m g/S p = pext
p = pext
∆V ∆V
XXXXyglace
Refroidissement isobare(p augmente, T diminue)
Expansion isobare(p diminue, T augmente)
Fig. 4.28 – Exercice 3 : Transformation isobare

110 CHAPITRE 4. ENERGETIQUE
Transformation adiabatiquepiston pousse piston tiretres rapidement tres rapidement
(< 1 min., par exemple)
e2 − e1 = cv (T2 − T1)
w1→2 = e2 − e1
= cv (T2 − T1)
q1→2 = 0∆V ∆V
Q = 0
Compression adiabatique(T , p augmentent)
(ρ augmente)
Detente adiabatique(T , p diminuent)
(ρ diminue)
Fig. 4.29 – Exercice 3 : Transformation adiabatique
Transformation isotherme (temperature constante) T1 = T2
piston pousse lentement
piston tire lentement
e2 − e1 = cv (T2 − T1)
= 0
w1→2 = r T1 lnρ2
ρ1
q1→2 = −w1→2
∆V ∆V
T T
eau courante(T )
Compression isotherme(p augmente, ρ augmente)
Detente isotherme(p diminue, ρ diminue)
Fig. 4.30 – Exercice 3 : Transformation isotherme

Chapitre 5
Acoustique
D’apres le livre « Acoustique generale », C. Potel et M. Bruneau, Ellipses, Paris, 2006, et d’apresles documents « Travaux Diriges de 2007-08, Universite Pierre et Marie Curie », de Q. Grimal.
5.1 Introduction
L’acoustique est souvent consideree comme etant la plus ancienne des disciplines scientifiquesde la physique. Son developpement s’est accelere ces quarante dernieres annees, periode au coursde laquelle son champ d’applications s’est etendu au domaine medical (echographie, . . . ) etindustriel (controle non destructif des materiaux, . . . ).
Science du son, l’acoustique en etudie la production, la transmission, la detection et les effets.Notons que la notion de son n’est pas attachee uniquement aux phenomenes aeriens responsablesde la sensation auditive, mais aussi a tous les autres phenomenes qui sont gouvernes par desproprietes physiques analogues. C’est ainsi que les perturbations trop « graves » (infrasons) outrop « aigues » (ultrasons) pour etre percues par l’oreille humaine sont appelees « sons ». Lesphenomenes lies a la propagation acoustique sous-marine, la propagation acoustique dans lessolides, . . . sont des domaines etudies en acoustique.
L’acoustique se distingue de l’optique et des ondes radioelectriques parce que le son est unmouvement ondulatoire mecanique et non une onde electromagnetique. La premiere ne sepropage que dans la matiere, contrairement a la seconde qui se propage dans le vide.
En d’autres termes, les domaines tels que la parole, la musique, l’enregistrement et la re-production des sons, la telephonie, l’amplification, l’audiologie, l’acoustique architecturale, lecontrole acoustique sont intimement lies a la sensation auditive. Mais le son est aussi un moyende transport de l’information qui ne fait pas reference a l’oreille humaine : par exemple, la com-munication sous-marine est la propagation du son dans un milieu complexe, l’echographie quiexploite le fait que la perturbation sonore transmise depend des milieux traverses est largementutilisee dans le domaine medical, . . .
5.1.1 Historique
Meme si les premieres etudes sur les phenomenes acoustiques remontent au 6e siecle avantJ.-C., avec l’ecole Pythagorienne, les decouvertes faites dans les grottes montrent que, quelquesmillenaires avant J.-C., les hommes prehistoriques s’interessaient deja a l’acoustique. Quelquestraces de divers instruments pouvant produire des sons ont ainsi ete decouvertes ; en effet, leshommes du Paleolithique ont laisse des instruments emetteurs de signal sonore : des instrumentsde musique (flute) ou les phalanges sifflantes, voir le site :
http://pagesperso-orange.fr/palladia/prehistoire/la_musique_dans_la_prehistoire.htm
111

112 CHAPITRE 5. ACOUSTIQUE
L’interet porte par l’homme aux phenomenes sonores remonte donc a la nuit des temps, maiscet interet ne fut pas, des l’origine, d’ordre scientifique. Les premieres recherches concernant lesphenomenes sonores datent du 6e siecle avant l’ere chretienne. En effet, c’est a cette epoque quel’ecole Pythagorienne se pencha sur le fonctionnement des cordes vibrantes et construisit uneechelle musicale. Par la suite, des reflexions et des observations visant a decouvrir la nature duphenomene sonore se sont deroulees sur plusieurs siecles. L’hypothese que le son est une ondeemise par le mouvement de l’air remonte ainsi aux Grecs.
La theorie mathematique de la propagation sonore a commence avec Isaac Newton (1642–1727), celebre mathematicien, astronome et philosophe anglais. Puis des progres importantsapparurent au 17e siecle avec le suisse Leonhard Euler (1707–1783), les francais Joseph-Louisde Lagrange (1736–1813) et Jean Le Rond d’Alembert (1717–1783). Depuis lors, les theories,aussi complexes soient-elles, sont considerees, pour la plus grande part, comme des raffinementsde celles qui datent de cette epoque.
L’analyse des sons complexes a ete effectuee experimentalement par le physiologiste et phy-sicien allemand, Hermann von Helmholtz (1821–1894) au moyen de resonateurs qui portentson nom, voir le site :
http://fr.wikipedia.org/wiki/R\%C3\%A9sonance_de_Helmholtz
Il faut encore ajouter les travaux sur la frequence des sons du physicien francais Felix Savart(1791–1841) dont les resultats avaient deja ete pressentis par le celebre musicien Jean-PhilippeRameau (1683–1764), puis par le mathematicien francais Gaspard Monge (1746–1818).
5.1.2 Notion d’onde mecanique
Une onde mecanique est un mouvement oscillatoire qui se transmet de proche enproche dans un milieu materiel, par voisinage. C’est une information que l’on transmet a sonvoisin par changement de position. A une onde correspond un certain type de mouvement desmolecules du milieu au travers duquel l’onde se propage, ces molecules restant en moyenne dansleur etat d’equilibre. Dans un mouvement ondulatoire, ce n’est pas la matiere qui se propage,mais l’etat de mouvement de la matiere.
Definition
On designe par particule un volume de matiere a la fois suffisamment grand pour contenirun tres grand nombre de molecules, et suffisamment petit pour que les grandeurs physiquespuissent y etre considerees comme constantes. Comme exemple on peut envisager un petit cubede 1 mm3 dans un grand cube de beton de 50 m de cote.
Ondes de compression
Le mouvement des particules au passage de l’onde peut s’effectuer parallelement a la directionde propagation de l’onde. On dit que l’on a une onde de compression.
A titre d’exemple, considerons le mouvement des spires d’un ressort. Sur la figure 5.1, lespositions des spires du ressort sont dessinees a des instants differents. On peut y voir aussi lespositions d’une meme spire a des instants differents.
Sur la figure 5.2, le mouvement des particules du gaz contenu dans un tube est du aumouvement oscillatoire du piston place a gauche. Les niveaux de gris indiquent les niveaux dela pression (et aussi de la masse volumique du gaz) ; les zones plus sombres correspondent ades pressions et des masses volumiques plus elevees ; les zones plus claires correspondent a despressions et des masses volumiques moins elevees. On peut voir les positions de ces zones a desinstants differents.

5.1. INTRODUCTION 113
masse attachee au ressortinstant t
instant t1
instant t2
Fig. 5.1 – Vibrations des spires d’un ressort
piston
haute pression basse pression
instant t
instant t1
instant t2
F
Fig. 5.2 – Mouvement oscillatoire du gaz
Ondes de cisaillement
Le mouvement des particules au passage de l’onde peut s’effectuer perpendiculairement a ladirection de propagation de l’onde. On dit que l’on a une onde de cisaillement.
A titre d’exemple, considerons le mouvement des masselettes reliees par des ressorts (Fig.5.3). Les masselettes se deplacent de haut en bas a mesure que l’impulsion se deplace de la gauchevers la droite. On peut suivre la position de l’une des masselettes a des instants differents.
Sur la figure 5.3, on a aussi dessine la forme d’une corde a des instants differents. Une ondede flexion creee a l’instant initial se deplace de gauche a droite.
5.1.3 Grandeurs caracteristiques d’une onde
Lors de la propagation d’une onde dans un milieu, les particules constituant la matiereoscillent au passage de l’onde, le mouvement etant transmis de particule a particule. Une ondepeut etre decrite par un certain nombre de grandeurs physiques relatives a une particule (centreeen M) et qui evoluent en fonction du temps t et de la position M .
Considerons de l’air initialement au repos. Les grandeurs physiques que l’on peut attacher ala particule centree en M sont, par exemple :
– le vecteur deplacement de la particule par rapport a sa position au repos : ~u,– la fluctuation de la pression, c’est-a-dire la difference entre la pression reelle de l’air et la
pression de ce meme air au repos,

114 CHAPITRE 5. ACOUSTIQUE
mouvementautorise
instant t4
instant t3
instant t2
instant t1
instant t0
Fig. 5.3 – Ondes de cisaillement
– la fluctuation de la masse volumique, c’est-a-dire la difference entre la masse volumiquereelle de l’air et la masse volumique de ce meme air au repos.
piston plan d’air
0 xu(x, t)
u(0, t) = A sin(ω t) u(x, t) = A sin{ω (t− x/c)}
Fig. 5.4 – Mouvement de l’air cree par le piston
A titre d’exemple, considerons un piston P plan (Fig. 5.4) situe dans le plan x = 0 et animed’un deplacement sinusoıdal defini par x = A sin(ω t). Le piston en mouvement met l’air dansson voisinage en mouvement. Le mouvement de l’air se transmet ensuite de proche en proche.Ainsi la particule d’air, situee en M d’abscisse x a l’instant t = 0, effectue des mouvements deva et vient autour de ce point x. Le deplacement de cette particule d’air representee par le pointM est : ~u = u~ex, ou ~ex est le vecteur unitaire de l’axe (O, x) :
u = A sin{
ω(t− x
c
)}(5.1)
On dira que l’on a une onde acoustique emise dans l’air par le piston P . Pour cette onde, ondefinit :
– la vitesse ou celerite de l’onde : c– l’amplitude de l’onde : A– la pulsation de l’onde : ω– la frequence de l’onde : f = ω/(2 π)

5.1. INTRODUCTION 115
On peut aussi ecrire de maniere equivalente :
u = A sin{
2 π
(t
T− x
λ
)}(5.2)
avec :– la periode de l’onde T : T = 2π/ω– la frequence de l’onde f : f = ω/(2 π) = 1/T– la longueur d’onde λ : λ = c T– le nombre d’onde k : k = ω/c = 2π/λ– la phase globale de l’onde : (ω t− k x)
En introduisant le nombre d’onde k, on peut ecrire :
u = A sin(ω t− k x) (5.3)
Remarque
Ces differentes notions seront illustrees dans la suite du cours. Mais des maintenant, faisonsune remarque sur la notion de frequence. La frequence d’une onde est la « rapidite » aveclaquelle la particule oscille autour de sa position moyenne, c’est-a-dire le nombre de « va et vient »que fait la particule en une seconde. La notion de frequence est donc une notion essentielle enacoustique. Elle est liee a la repetition d’un mouvement.
Nous avons considere dans les expressions (5.1), (5.2) et (5.3) un mouvement sinusoıdal. Maisil faut bien noter que l’on peut considerer des mouvements periodiques, mais pas necessairementsinusoıdaux. Pour des mouvements periodiques, on peut naturellement definir une periode etune frequence.
L’unite pour mesurer une frequence est le hertz ou Hz : 1 Hz = 1 s−1.Comme exemple, la note « la » du diapason a la frequence 440 Hz.
5.1.4 Transmission acoustique
Dans l’exemple presente dans le paragraphe precedent, on a vu que l’onde emise par lepiston en x = 0 se propageait dans l’air pour arriver au point d’abscisse x. Ce phenomene detransmission est un phenomene tres important en acoustique.
Le phenomene de transmission acoustique met en jeu trois elements : un emetteur,un recepteur et un milieu de propagation. A titre d’exemple, la figure 5.5 presente le parcoursdu bruit dans un cas concret de la vie de tous les jours : la source de bruit est ici un engin dechantier ou un helicoptere, le recepteur est l’oreille et le milieu de propagation est l’air ou lastructure des batiments.
Fig. 5.5 – Phenomene de transmission acoustique

116 CHAPITRE 5. ACOUSTIQUE
5.1.5 Mouvements acoustiques - Domaine audible
Infrasons
Sonsgraves
Sonsmédiums
Sonsaigus
Ultrasons
20000
5000
fréquence (Hz)
350
20pr
essi
on (
Pa)
temps (s)
1
0
-10,005 0,010
Domaineaudible
pourl’oreille
humaine
Domainepris en
comptepour
l’acoustiquedu bâtiment
pres
sion
(Pa
)
temps (s)
1
0
-10,005 0,010
pres
sion
(Pa
)
temps (s)
1
0
-10,005 0,010
100
400
1500
Fig. 5.6 – Domaine audible, infrasons et ultrasons
L’etude de la propagation des ondes dans un milieu fluide compressible (air par exemple),dans des situations simples (fluide au repos) fait essentiellement intervenir une grandeur phy-sique, a savoir la fluctuation de pression.
La fluctuation de pression est la difference entre la pression reelle de l’air et la pressionde ce meme air au repos. Le son est caracterise par une frequence, c’est-a-dire le nombre defluctuations de pression par seconde. Par exemple, le mouvement oscillant d’une membrane dehaut-parleur dans l’air engendre un son (dont l’origine est precisement due a la fluctuation de lapression) qui se propage dans l’air. L’oreille humaine est sensible a des sons compris entre 20 Hzet 20 000 Hz. Les ondes dont les frequences sont inferieures a 20 Hz sont appelees « infrasons »et celles pour des frequences superieures a 20 000 Hz « ultrasons ». Ceci est illustre sur la figure5.6 (voir : http://www.spectra.fr/notions-norme-acoustique-r9.html).
5.1.6 Ordres de grandeur de la pression acoustique
Definition. On appelle « pression acoustique » ou « pression sonore » la fluctuation de pres-sion.
La pression acoustique s’exprime en pascal (Pa).La pression acoustique peut etre positive, negative ou nulle.Le niveau de la pression acoustique quantifie l’amplitude du son. Cependant l’oreille humaine,
est un recepteur ultrasensible, et elle detecte les sons dont l’amplitude varie de 2 × 10−5 Pa a20 Pa. La pression acoustique la plus faible 2 × 10−5 Pa correspond au seuil d’audibilite, etla pression acoustique la plus forte 20 Pa au seuil de douleur. Pour comparaison, la pression

5.2. EQUATIONS DES ONDES DANS UNE CORDE 117
Période (en seconde)
pression sonore
dépression (pression min.)
compression (pression max.)
pression atmosphérique
temps
amplitude
Fig. 5.7 – La pression acoustique
atmospherique est de l’ordre de 105 Pa, et les variations meteorologiques de la pression at-mospherique de l’ordre de 16 000 Pa. Sur la figure 5.7, on donne un exemple de variationsinusoıdale pour la pression acoustique ou pression sonore (figure extraite d’un cours de J.-D.Polack (Cours LA 101, Universite Pierre et Marie Curie, 2007)).
La plage pour la pression acoustique allant de 2 × 10−5 Pa a 20 Pa est tres etendue. Afind’avoir une echelle plus raisonnable, il est d’usage d’utiliser une echelle logarithmique pourmesurer le niveau sonore. On introduit alors une nouvelle unite appelee decibel et notee « dB ».Ceci sera fait et commente dans la derniere partie de ce cours (partie 5.4).
Dans les trois paragraphes suivants, nous presentons l’equation des ondes transversales dansune corde, l’equation des ondes dans un tube puis quelques elements de perception acoustiqueet d’environnement sonore.
5.2 Equations des ondes dans une corde
Dans ce paragraphe, nous allons etablir l’equation des ondes dans une corde, puis nousetudierons deux types de solutions, les ondes propagatives et les ondes stationnaires. Mais enpreliminaire, nous introduisons la notion de fonction de deux variables et de derivees partielles.
5.2.1 Fonctions de deux variables et derivees partielles
De nombreuses fonctions en physique dependent de plusieurs variables : par exemple latemperature a la surface du globe depend a la fois du point ou on se trouve et de l’heure alaquelle on fait le releve. Mathematiquement parlant, on appelle ceci une fonction de plusieursvariables (ici, trois variables scalaires a savoir l’heure, la latitude et la longitude).
Soit f(x, t) une fonction de deux variables, x et t. On peut avoir besoin de deriver f(x, t)par rapport a chacune de ces variables separement. On appelle derivee partielle par rapport ax la derivee de f(x, t) par rapport a la variable d’espace x, le temps t etant considere constant.Ceci est note :
∂f
∂x
De meme, on peut definir la derivee partielle par rapport a t, la variable d’espace x etantconsideree constante, d’ou :
∂f
∂t

118 CHAPITRE 5. ACOUSTIQUE
Le symbole « ∂ » est appele « d ronde ». Il ne faut pas le confondre avec le « d droit » utilisepour les derivees d’une fonction d’une seule variable.
On peut deriver a nouveau par rapport a l’une ou l’autre des variables et on obtient :
∂2f
∂t2=
∂(∂f/∂t)∂t
;∂2f
∂x2=
∂(∂f/∂x)∂x
∂2f
∂t ∂x=
∂(∂f/∂x)∂t
;∂2f
∂x ∂t=
∂(∂f/∂t)∂x
On verifie que, pour la plupart des fonctions rencontrees en physique et mecanique, on peutpermuter l’ordre des derivees partielles
∂2f
∂t ∂x=
∂2f
∂x ∂t
Exemples : Soit f(x, t) = 5 t3 + 2 x2 t et g(x, t) = sin(x2 t). On a :
∂f
∂t= 15 t2 + 2 x2 ;
∂f
∂x= 4x t ;
∂2f
∂t2= 30 t ;
∂2f
∂x2= 4 t ;
∂2f
∂t ∂x=
∂2f
∂x ∂t= 4x
∂g
∂t= x2 cos(x2 t) ;
∂g
∂x= 2x t cos(x2 t)
∂2g
∂t2= −x4 sin(x2 t) ;
∂2g
∂x2= 2 t cos(x2 t)− (2 x t)2 sin(x2 t)
∂2g
∂t ∂x=
∂2g
∂x ∂t= 2x cos(x2 t)− 2 x3 t sin(x2 t)
5.2.2 Equation des ondes transversales dans une corde
Le but de ce paragraphe est d’etablir l’equation des ondes pour un cas simple : il s’agitdes ondes dans une corde. Comme corde, on peut penser a une corde de piano ou de guitare.Considerons une corde de masse lineique µ (masse par unite de longueur de corde) supposeeconstante. La corde est soumise a une tension T en ses deux extremites. On cherche a etablirl’equation des ondes transversales dans cette corde.
On considere une corde au repos. Dans le plan rapporte au repere orthonorme (O, x, y) (Fig.5.8a), elle coıncide avec l’axe des abscisses (O, x). On suppose que cette corde ne se deplaceque perpendiculairement a sa position de repos. On note ~u(x, t) le deplacement du point Mde la corde d’abscisse x et a l’instant t. De plus, on note α(x, t) l’angle que fait la corde avecsa direction au repos (on supposera α(x, t) tres petit devant un). Cette hypothese va nouspermettre de lineariser toutes les fonctions trigonometriques. Enfin on neglige le poids de lacorde par rapport aux autres forces.
Application du principe fondamental de la dynamique
On considere une petite portion MN de la corde, de longueur δx. Lorsque la corde est aurepos, les deux points M et N sont voisins et ont pour abscisses x et x + δx. La masse de laportion de corde MN est µ δx.
Lorsque la corde est en mouvement, a l’instant t elle occupe une nouvelle position (Fig.5.8b). A l’instant t, pour les points M et N qui se sont deplaces parallement a l’axe (O, y), onintroduit leurs deplacements ~u(x, t) et ~u(x + δx, t). Sur la figure 5.8b et aussi dans ce qui suit,afin d’alleger les notations, on ne fait pas figurer la variable t.

5.2. EQUATIONS DES ONDES DANS UNE CORDE 119
y
y
~T (x + δx)
α(x + δx)N
N
M
M
α(x)
~u(x + δx)~u(x)
~T (x)
0
0
x
x
x
x
x + δx
x + δx
(b) Corde a l’instant t
(a) Corde au repos
Fig. 5.8 – Petit deplacement d’une corde
On applique le principe fondamental de la dynamique au petit element MN de corde. Celui-ci implique que le produit de la masse de MN par son acceleration est egal a la somme desforces exterieures appliquees a MN . On obtient :
µ δx ~u(x) = ~T (x) + ~T (x + δx) (5.4)
La quantite ~u(x) represente l’acceleration du point M , et aussi celle du morceau de cordeMN car MN est petit. Le vecteur ~T (x) est la force exercee par la partie gauche de la cordesur l’element MN . De meme, le vecteur ~T (x + δx) est la force exercee par la partie droite de lacorde sur l’element MN . Les vecteurs ~T (x) et ~T (x + δx), correspondent aux efforts de tensiondans la corde. Ces vecteurs sont respectivement tangents a la corde en M et en N . On noteraT (x) et T (x + δx) les modules de ces deux vecteurs. Enfin le poids de MN a ete neglige.
Obtention de l’equation des ondes transversales dans la corde
Nous allons projeter l’equation vectorielle (5.4) sur les deux axes (O, x) et (O, y) (Fig. 5.8b).On introduit les deux angles α(x) et α(x + δx), comme indique sur la figure. On introduit aussiles deux composantes ux(x) et uy(x) du vecteur ~u(x) sur les axes (O, x) et (O, y).
Par projection sur (O, x), il vient :
µ δx ux(x) = −T (x) cos(α(x)) + T (x + δx) cos(α(x + δx))
On suppose que α(x) est tres petit. Ainsi cos(α(x)) et cos(α(x+δx)) sont approximativementegaux a 1, ce qui permet decrire l’equation precedente sous la forme :
µ δx ux(x) = −T (x) + T (x + δx)
Le probleme considere est l’etude des vibrations transversales de la corde. Autrement dit, lemouvement est suppose etre seulement suivant la direction (O, y), ce qui signifie que et ux(x) ≡ 0.L’equation projetee sur (O, x) devient donc :
0 = −T (x) + T (x + δx)

120 CHAPITRE 5. ACOUSTIQUE
d’ou l’on deduit que T (x) est une constante sur toute la corde. On posera T (x) = T dans lasuite.
Par projection de l’equation (5.4) sur (O, y), il vient :
µ δx uy(x) = −T sin(α(x)) + T sin(α(x + δx))
On suppose toujours que α(x) est tres petit. Ainsi sin(α(x)) ≈ α(x) et sin(α(x+δx)) ≈ α(x+δx).Ceci permet decrire l’equation precedente sous la forme :
µ δx uy(x) = −T α(x) + T α(x + δx) = T (α(x + δx)− α(x))
µ uy(x) = Tα(x + δx)− α(x)
δx
ce qui donne, en utilisant le fait que δx est infinitesimal (δx→ 0) :
µ uy(x) = T∂α(x)
∂x
Par ailleurs, sur la figure 5.8b, on voit, sur le petit triangle rectangle dont l’hypotenuse estMN , que :
α(x) ≈ sin(α(x)) =uy(x + δx)− uy(x)
δx≈ ∂uy(x)
∂x
Finalement,
µ uy(x) = T ∂
∂x
(∂uy(x)
∂x
)= T ∂2uy(x)
∂x2(5.5)
En reintroduisant la variable temps t dans l’equation (5.5), celle-ci s’ecrit :
µ∂2uy(x, t)
∂t2= T ∂2uy(x, t)
∂x2(5.6)
C’est l’equation des ondes transversales dans la corde.
Vitesse de propagation des ondes
L’equation (5.6) des ondes transversales dans la corde s’ecrit aussi :
∂2uy(x, t)∂t2
− Tµ
∂2uy(x, t)∂x2
= 0 (5.7)
La dimension de T est celle d’une force c’est-a-dire masse × longueur × (temps)−2 ; la di-mension de µ est celle d’une masse par unite de longueur soit masse × (longueur)−1. On voitdonc que la dimension de T /µ est (longueur)2 × (temps)−2. C’est donc une vitesse au carre. Onintroduira donc la vitesse c definie par :
c =√T /µ (5.8)
Equation des ondes transversales dans une corde
On introduit une simplification dans les notations en posant : uy(x, t) = u(x, t). L’equation(5.7) devient :
∂2u(x, t)∂t2
− c2 ∂2u(x, t)∂x2
= 0 (5.9)
La vitesse c est la vitesse de propagation (celerite) des ondes transversales dans la corde,comme ceci va etre mis evidence dans le paragraphe suivant.

5.2. EQUATIONS DES ONDES DANS UNE CORDE 121
5.2.3 Ondes dans une corde, modes propagatifs
Dans le paragraphe qui precede, nous avons determine l’equation (5.9) des ondes transversalesdans une corde. Nous allons maintenant en chercher des solutions, les etudier et donner quelquesapplications.
Solution de l’equation des ondes
Considerons une fonction de la forme
(S1) : u1(x, t) = U1(x + c t)ou (S2) : u2(x, t) = U2(x− c t),
ou U1(x+c t) et U2(x−c t) sont deux fonctions d’une seule variable ; c’est la variable z = x+c tdans le premier cas et la variable z = x− c t dans le second cas. Il est facile de verifier que :
∂U1(x + c t)∂t
= cU ′1,
∂2U1(x + c t)∂t2
= c2 U ′′1 ,
∂U1(x + c t)∂x
= U ′1,
∂2U1(x + c t)∂t2
= U ′′1
Les notations « ′ » et « ′′ » correspondent aux derivees premiere et seconde de U1(z) parrapport a z. En consequence, l’equation (5.9) est verifiee car :
∂2U1(x + c t)∂t2
− c2 ∂2U1(x + c t)∂x2
= c2 U ′′1 − c2 U ′′
1 = 0
Le calcul est similaire pour la fonction U2(x− c t).On admettra que toute solution de l’equation des ondes (5.9) est necessairement de la forme
(S1) ou (S2), ou bien une combinaison lineaire des deux.
Description des solutions (S1) et (S2)
u = U2(x)
u = U2(x− c t0)
u = U2(x− c t1)
0
0
0
x
x
x
x0
x0 + c t0
x0 + c t1
(a) Instant t = 0
(b) Instant t0
(c) Instant t1
Fig. 5.9 – Onde propagative
Les fonctions de la forme U2(x− c t) correspondent a des ondes qui se propagent dans le sensdes x croissants ; les fonctions de la forme U1(x+c t) correspondent a des ondes qui se propagentdans le sens des x decroissants. Pour s’en convaincre, on considere les schemas de la figure 5.9.

122 CHAPITRE 5. ACOUSTIQUE
On represente (Fig. 5.9a) une perturbation sur la corde a l’instant t = 0 qui correspond augraphe de la fonction U2(x) (on a dessine une perturbation constituee de deux petits segmentsautour du point d’abscisse x0). A l’instant t = t0, on dessine la forme prise par la corde c’est-a-dire le graphe de la fonction U2(x− c t0) (voir Fig. 5.9b) ; les deux petits segments sont alorsautour du point d’abscisse (x0 +c t0). En effet (x0 +c t0)−c t0 = x0. On peut, de meme, dessinerla forme de la corde a un autre instant t1 (Fig. 5.9c).
On remarque que la hauteur de la perturbation reste constante et qu’elle se deplace le longde la corde dans le sens des x positifs (sens des x croissants). Plus precisement, la valeur de lafonction U2(x− c t) qui represente un deplacement sur la corde est constante, si x et t sont telsque x− c t = constante.
Lors de la propagation (lorsque l’on suit la perturbation dans son mouvement), la « phase »de l’onde, c’est-a-dire le terme x − c t est constant. La perturbation se propage sur la distance(x0 + c t1)− (x0 + c t0) = c (t1 − t0) pendant le temps t1 − t0 : on dit que la perturbation sedeplace a la vitesse c.
Naturellement, on peut faire le meme raisonnement pour la solution (S2), laquelle corresponda la fonction U1(x+c t). La propagation se fait, cette fois ci, dans le sens des x negatifs. La vitessede propagation est en module egale a c. La propagation se fait dans le sens des x decroissants.
Il existe beaucoup de generalisations a l’exemple precedent des vibrations transversalesdans une corde. En effet, la propagation de nombreuses perturbations mecaniques peuvent etrerepresentees par de telles solutions : onde sismique (tremblement de terre, explosion), vague,onde acoustique dans un fluide, etc.
5.2.4 Onde progressive sinusoıdale
On considere une onde de la forme (S2), telle que 1e profil initial (a t = 0) de la perturbationest sinusoıdal : u(x0, 0) = A sin(k x0+ϕ). On dit aussi que l’on a une onde harmonique. L’ondeest de type (S2), donc a l’instant t, le profil de la perturbation est : u(x, t) = A sin(k (x−c t)+ϕ).
Remarquons que :
u(x, t) = A sin(k x− k c t + ϕ) = A sin(k c t− k x + π − ϕ)
Comme dans le paragraphe 5.1.3, on a les definitions suivantes :– la constante k est le nombre d’onde ;– la constante ϕ est appelee constante de phase, ϕ est sans dimension, (cette grandeur n’a
pas ete introduite dans 5.1.3) ;– la constante ω = k c, ou c est la vitesse de l’onde, est la pulsation ;– la constante λ = 2π/k est la longueur d’onde ;– la constante T = 2π/ω est la periode et f = 1/T est la frequence (il ne faut pas confondre
ce T avec celui definissant la tension de la corde qui a ete introduit pour etablir l’equationdes ondes).
Pour chacune de ces grandeurs, on peut donner sa dimension et une interpretation physique.– Ainsi, le nombre d’onde k correspond a la frequence spatiale des ondes harmoniques ; sa
dimension est celle de l’inverse d’une longueur.– La constante de phase ϕ est sans dimension. Sa valeur est liee a l’origine choisie pour
l’espace et pour le temps.– La pulsation ω est similaire a une frequence. Sa dimension est l’inverse d’un temps. La
pulsation s’exprime en s−1.– La constante λ correspond a la periode spatiale des ondes harmoniques ; sa dimension est
celle d’une longueur.– Enfin T est la periode, sa dimension est celle d’un temps.

5.2. EQUATIONS DES ONDES DANS UNE CORDE 123
Remarquons que l’on peut ecrire pour l’onde u(x, t) = A sin(k (x−c t)+ϕ) plusieurs formes,toutes equivalentes :
u(x, t) = A sin(k x− ω t + ϕ) = A sin(k (x− c t) + ϕ) = A sin[ω
(x
c− t
)+ ϕ
]Suivant le probleme a traiter, on utilise l’une ou l’autre de ces formes.
5.2.5 Application : propagation d’une onde sismique a la surface de la terre
~u(x2, t)
~u(x1, t)
A B
x1 x2d
Fig. 5.10 – Propagation d’une onde sismique entre deux points
On observe la propagation d’une onde sismique a la surface de la terre. On suppose quecette onde est associee a un deplacement perpendiculaire a la surface de la terre et qu’ellepeut etre decrite comme la propagation d’une onde sinusoıdale. Cette onde est de la formeu(x, t) = U sin(k x− ω t + ϕ) ou U est une constante. On cherche a obtenir un certain nombred’informations sur l’onde a partir de mesures relevees en deux points.
Deux capteurs A et B sont places a des points x1 et x2, tels que x1 − x2 = d = 10 m. Onsuppose que d est inferieur a la longueur d’onde λ = 2 π/k de l’onde sismique (c’est-a-dire queA et B sont suffisamment proches l’un de l’autre). L’onde se deplace le long de l’axe des x. EnA et B on mesure le deplacement u(x, t) perpendiculairement a l’axe x (Fig. 5.10).
– Au point A, on constate que le premier maximum, observe au temps t = t0 = 70 s estu(x1, t0) = U = 10 cm. L’origine des temps est fixee arbitrairement et ne correspond pas,a priori, au moment ou l’onde sismique a ete engendree. Il s’ecoule la duree ∆t = 5 s entredeux maxima successifs du deplacement au point A.
– Au point B, on constate que le premier maximum est observe au temps t = t0 + δt avecδt = 0.01 s.
On peut determiner la periode, la frequence et la pulsation de l’onde. En effet, la periode estdonnee par le temps qui s’ecoule entre deux maxima successifs du deplacement au point A ; elleest donc T = 5 s. La frequence est f = 1/T = 0.2 Hz. La pulsation est ω = 2π f = 1.2566 rad.s−1.
On peut calculer la celerite, la longueur d’onde et le nombre d’onde. La celerite s’obtienten divisant la distance d par le temps mis par le premier maximum pour aller de A a B :c = d/δt = 10/0.01 = 1000 m.s−1 ; la longueur d’onde et le nombre d’onde s’en deduisent :λ = c/f = 5000 m, k = 2 π/λ = 0.0013 m−1. Remarquons que la longueur d’onde λ = 5000 mest bien plus grande que la distance d = 10 m, ce qui justifie a posteriori l’hypothese faite audepart.
L’expression du deplacement transversal en fonction de la position et du temps est donneepar : u(x, t) = U sin[k (x−c t)+ϕ]. La vitesse de deplacement des particules s’obtient en derivantla position par rapport a t ; elle est alors u(x, t) = −k cU cos[k (x−c t)+ϕ]. Le module maximumde cette vitesse est k cU = ω U .

124 CHAPITRE 5. ACOUSTIQUE
Si a l’onde precedente u(x, t) = U sin[k (x − c t) + ϕ], on ajoute une autre onde sinusoıdalede meme amplitude, de meme celerite et de meme longueur d’onde, mais avec une constantede phase differente, c’est-a-dire u(x, t) = U sin[k (x− c t) + ϕ′], par addition, on a comme onderesultante la somme des deux ondes. Cette somme est :
U sin[k (x− c t) + ϕ] + U sin[k (x− c t) + ϕ′] = 2 U sin{
k (x− c t) +ϕ + ϕ′
2
}cos
ϕ− ϕ′
2
On a utilise la formule : sin(a) + sin(b) = 2 sina + b
2cos
a− b
2.
Ainsi la perturbation due aux deux ondes reunies est donc une onde sinusoıdale de memefrequence, de meme longueur d’onde mais de phase et d’amplitude modifiees.
5.2.6 Conditions aux limites
L’objectif de ce paragraphe est de preciser l’influence des « conditions aux limites » sur lesvibrations d’une corde, c’est-a-dire le fait que les cordes ne sont pas infiniment longues.
Reflexion a une extremite fixe
On a vu (paragraphe 5.2.3) que le deplacement transversal des points de la corde lors dupassage de l’onde est de la forme u1(x, t) = U1(x + c t) ou u2(x, t) = U2(x − c t), ou unecombinaison lineaire de ces deux solutions.
En changeant de notations, considerons un deplacement transversal de la forme
u(x, t) = f(x + c t) + g(x− c t) (5.10)
Il est facile de verifier que u(x, t) est solution de l’equation des ondes (5.9). On voit queu(x, t) est la somme d’une onde se propageant dans le sens des x decroissants (l’onde f(x+ c t))et d’une onde se propageant dans le sens des x croissants (l’onde g(x− c t)).
On suppose que la corde est etalee le long de l’axe (O, x), occupe la position x > 0 et que sonextremite en x = 0 est fixee, par exemple a un mur (Fig. 5.11a). On notera u(x, t) le deplacementtransversal du point d’abscisse x de la corde. On ecrira que l’extremite en x = 0 de la corde estfixe. Ceci s’ecrit :
u(0, t) = 0 pour ∀t (5.11)
La condition (5.11) est dite « conditions aux limites » en x = 0.Reprenons la solution (5.10) : u(x, t) = f(x + ct) + g(x − ct). Ecrivons que cette solution
verifie la condition (5.11). Il vient :
u(0, t) = f(c t) + g(−c t) = 0 pour ∀t
En posant α = c t, la relation precedente s’ecrit : f(α) + g(−α) = 0 pour tout α. Il faut biennoter que l’on a ici une identite en α et non une equation pour α. On obtient une relation entreles deux fonctions f et g. Cette relation est : f(α) ≡ −g(−α) ou bien g(α) ≡ −f(−α). On adonc g(x − c t) ≡ −f(−(x − c t)). La solution de l’equation (5.9) avec la condition aux limites(5.11) est donc :
u(x, t) = f(x + c t)− f(−(x− c t) (5.12)
Sur la figure 5.11, nous avons represente cette solution dans le cas ou f(α) = sin(α) pourπ < α < 2 π et f(α) = 0 pour α ≤ π et pour α ≥ 2 π.
Sur la figure 5.11a, nous representons la deformation initiale en t = 0. On a : x+c t = x si bienque f(x) = sin(x) pour π < x < 2 π et f(x = 0) ailleurs. On a f(−(x− c t)) = f(−x) = 0 pour

5.2. EQUATIONS DES ONDES DANS UNE CORDE 125
tout x positif, car −x est negatif. La figure 5.11a correspond au graphe de f(x+c t)−f(−(x−c t))pour t = 0. On remarque que le deplacement est negatif.
Sur la figure 5.11b, nous representons egalement la deformation a l’instant t tel que 0 <t < π/c. On a : π − c t > 0. Pour π − c t < x < 2 π − c t, on a π < x + c t < 2 π si bien quef(x + c t) = sin(x + c t). Pour x < π − c t et x > 2 π − c t, f(x + c t) est nulle. On a aussi :−x < −(x − c t) = −x + c t < −x + π < π et comme consequence f(−(x − c t)) = 0 pourtout x positif. La figure 5.11b correspond au graphe de f(x + c t)− f(−(x− c t)) pour t tel que0 < t < π/c. On a une onde se deplacant vers les x negatifs. Le deplacement est toujours negatif.
Sur la figure 5.11c, nous representons la deformation a l’instant t tel que t > 2 π/c. Ona : x + c t > x + 2 π > 2 π donc f(x + c t) = 0. Par ailleurs, −(x − c t) = −x + c t. Pour−π+c t > x > c t−2 π > 0, on a π < −x+c t < 2 π si bien que −f(−(x−c t)) = − sin(−x+c t) surcet intervalle, et egale a 0 ailleurs. La figure 5.11c correspond au graphe de f(x+c t)−f(−(x−c t))pour t tel que t > 2 π/c. Le deplacement est positif. On a une onde se deplacant vers les x positifs.
En conclusion, sur la figure 5.11, la deformation initiale (t = 0) se deplace d’abord vers lesx negatifs. Elle atteint le point x = 0 a l’instant t = π/c. Pour des temps superieurs a 2 π/c, ladeformation se deplace vers les x positifs. Il y a donc une onde qui se propage dans le sens desx croissants, avec une position symetrique de celle de l’onde incidente par rapport a x = 0 (Fig.5.11c).
Les deux ondes dessinees, une sinusoıde a l’endroit et une sinusoıde a l’envers, se sommentautour de l’interface, de sorte que le deplacement est toujours nul a l’interface. On a ici, uneonde incidente (onde se dirigeant vers le mur) et une onde reflechie (onde s’eloignant du mur).
(a) Corde a l’instant t = 0π 2 π
0 x
0 0x x
(b) 0 < t < π/c (c) t > 2 π/c
Fig. 5.11 – Corde fixee au mur x = 0
5.2.7 Ondes stationnaires
On cherche maintenant des solutions sinusoıdales a l’equation des ondes (9) pour une cordede longueur ` dont les deux extremites en x = 0 et x = ` sont fixees rigidement (Fig. 5.12).
En considerant la condition d’attachement fixe en x = 0, on peut ecrire la forme generaledes solutions, en appliquant le resultat (5.12) du paragraphe precedent : u(x, t) = f(x + c t) −f(−(x− c t)).
On va chercher des ondes sinusoıdales, c’est-a-dire que l’on va supposer que f(x + c t) =A sin(k x + ω t) avec c = ω/k. Avec ce choix pour f(x + c t), la solution (5.12) s’ecrit :
A sin(k x + ω t)−A sin(−k x + ω t) = A (sin(k x + ω t) + sin(k x− ω t)) = 2 A sin(k x) cos(ω t)
Cette solution verifie bien u(x, t) = 0 en x = 0. Mais il nous reste a ecrire qu’elle verifie lacondition d’attachement fixe en x = `. Cette condition a la limite est : u(`, t) = 0 pour tout t.Ce qui implique
sin(k `) = 0

126 CHAPITRE 5. ACOUSTIQUE
Cette derniere equation permet de determiner les valeurs k du nombre d’onde. Elles sonttelles que : k ` = n π ou n est un nombre entier quelconque. On trouve donc une infinite devaleurs pour k. On notera :
kn =n π
`, n = 1, 2, 3, . . . , ωn = c kn, fn =
c kn
2 π=
n c
2 `(5.13)
Chaque solution est appelee onde harmonique, ou bien mode propre.Pour n = 1, l’onde harmonique est dite « fondamentale » (le mode propre est dit
« mode fondamental »).Sur la figure 5.12, on a dessine le deplacement de la corde pour les plus petites valeurs de
kn, qui correspondent a n = 1, n = 2, n = 3 et n = 4.
n = 1, sin(π x/`) n = 2, sin(2 π x/`)
n = 3, sin(3 π x/`) n = 4, sin(4 π x/`)
Fig. 5.12 – Les quatre premieres ondes harmoniques
Ventre et nœud
Un point ou le deplacement reste toujours egal a zero est appele « nœud ».Un point ou le deplacement est toujours maximum est appele « ventre ».Sur la figure 5.12, il est facile de voir les ventres et les nœuds : la solution correspondant
a n = 2 presente deux ventres et trois nœuds (en comptant les deux extremites de la corde) ;celle correspondant a n = 3 presente trois ventres et quatre nœuds ; celle correspondant a n = 4presente quatre ventres et cinq nœuds.
5.2.8 Application aux cordes de piano
La corde de piano donnant le « la » du diapason a pour longueur ` = 420 mm, et pourdiametre d = 1 mm. La masse volumique de l’acier qui la constitue est ρ = 7860 kg.m−3. Elleest tendue avec une tension T = 843 N. On se propose de calculer la vitesse c de propagationdes ondes transversales le long de cette corde.
On utilise la formule (5.8) pour calculer c : c =√T /µ. Il faut donc au prealable calculer la
masse lineique µ. Le volume de la corde est π × (d/2)2 × ` = 0.785× 420× 10−9 m3. La massede la corde est 7860× 0.785× 420× 10−9 = 6173.23× 420× 10−9 kg. La masse lineique (massepar unite de longueur) est : µ = 6173.23× 10−6 kg.m−1. D’ou c2 = 843/(6173.23× 10−6) m2.s−2
et c = 369.54 m.s−1.Il est ensuite facile de calculer les valeurs des frequences fn = n c/(2 `). Pour les dix premieres,
on a (Table 5.1) :

5.2. EQUATIONS DES ONDES DANS UNE CORDE 127
Tab. 5.1 – Frequences de la corde du « la » du piano
f1 f2 f3 f4 f5 f6 f7 f8 f9 f10
439.9 879.8 1319.8 1759.7 2199.6 2639.6 3079.5 3519.4 3959.3 4399.2
Le clavier d’un piano est represente sur la figure 5.13. Les frequences indiquees sur l’imagecorrespondent aux touches blanches du clavier. Les frequences correspondant aux touches noiresne sont pas indiquees. On passe de demi-ton en demi-ton en multipliant la frequence par 21/12 ;on peut ainsi calculer les frequences qui correspondent aux touches noires. L’ensemble de cesfrequences constituent la gamme temperee. Toutes les frequences calculees sont reporteesdans la table 5.2. Dans la premiere colonne, on a indique l’octave consideree. Les frequencessont indiquees, octave par octave.
Tab. 5.2 – Frequences des octaves du piano (les octaves sont indiquees dans la premiere colonne)
la si do re mi fa sol1 27.5 29 31 33 35 37 39 41 44 46 49 522 55 58 62 65 69 73 78 82 87 92 98 1043 110 117 123 131 139 147 156 165 175 185 196 2084 220 233 247 262 277 294 311 330 349 370 392 4155 440 466 494 523 554 587 622 659 698 740 784 8316 880 932 988 1047 1109 1175 1245 1319 1397 1480 1568 16617 1760 1865 1976 2093 2217 2349 2489 2637 2794 2960 3136 33228 3520 3729 3951 4186 4435
Chacune des frequences fn donnees dans la table 5.1, peut etre situee par rapport aux fre-quences de la gamme temperee donnees dans la table 5.2. Ainsi :
415 ≤ f1 = 439.9 ≤ 440831 ≤ f2 = 879.8 ≤ 880
1319 ≤ f3 = 1319.8 ≤ 1397.11661 ≤ f4 = 1759.7 ≤ 17602093 ≤ f5 = 2199.6 ≤ 2217
2637 ≤ f6 = 2639.6 ≤ 27942960 ≤ f7 = 3079.5 ≤ 31363322 ≤ f8 = 3519.4 ≤ 35203951 ≤ f9 = 3959.3 ≤ 4186
4186 ≤ f10 = 4399.2 ≤ 4435
Certaines frequences sont proches de celles de la gamme temperee, comme f1 = 439.9 Hz ouf2 = 879.8 Hz. Par contre les frequences f5 = 2199.6 Hz et f7 = 3079.5 Hz sont assez eloigneesdes frequences de la gamme temperee.
Lorsque la touche est frappee par le doigt du pianiste, le marteau vient frapper la corde(impulsion). Pour eliminer une frequence – ou plutot pour ne pas la generer – il ne faut pasdonner d’energie au mode de vibration correspondant, donc il faut exciter la corde sur un desnœuds de vibration du mode.

128 CHAPITRE 5. ACOUSTIQUE
27,5
30,8
6832
,703
36,7
0841
,203
43,6
5448
,999
55 61,7
3565
,406
73,4
1682
,407
87,3
0797
,999
110
123,
4713
0,81
146,
8316
4,81
174,
6119
622
024
6,94
261,
6329
3,66
329,
6334
9,23
392
440
493,
8852
3,25
587,
3365
9,26
698,
4678
3,99
880
987,
7710
46,5
1174
,713
18,5
1396
,915
6817
6019
75,5
2093
2349
,326
3727
93,8
3136
3520
3951
,141
86
do m
édiu
m
la1 la2 la3
f (H
z)la si d
oré m
ifa so
lla si d
or é m
ifa so
lla si d
or é m
ifa so
lla si d
or é m
ifa so
lla si d
or é m
ifa so
lla si d
or é m
ifa so
lla si d
oré m
ifa so
lla si d
o
Fig. 5.13 – La gamme temperee
5.3 Equation des ondes dans un tube
Dans le partie 5.2, nous avons determine l’equation (5.6) des ondes transversales dans unecorde. Nous allons maintenant nous interesser a la propagation des ondes dans un tube, tel qu’untuyau d’orgue ou une flute.
5.3.1 Equation des ondes dans un tube
Nous allons d’abord etablir l’equation des ondes dans un tube ; puis nous etudierons les ondesstationnaires presentes dans un tel tube.
On considere un tube rectiligne, cylindrique, de section droite S circulaire, tres fin et treslong (Fig.5.14a). On note (O, x) l’axe du tube. Ce tube contient de l’air, qui au repos, a la massevolumique ρ0 constante et est a la pression p0 constante.
A partir de cet etat au repos, on fait subir au fluide une petite perturbation. Les particulesdu fluide subissent un petit mouvement. Plus precisement considerons une particule fluide situeeau point d’abscisse x a l’instant t (Fig. 5.14b). Sa nouvelle masse volumique est ρ0 + ρ(x, t), sanouvelle pression est p0 + p(x, t) et sa vitesse est notee v(x, t). Les trois quantites ρ(x, t), p(x, t)et v(x, t) sont tres petites. Notons que p(x, t) est une fluctuation de pression (voir paragraphe5.1.6).
O x
x x + δx
x + v(x, t) δt x + δx + v(x + δx, t) δt
(a)
(b)
(c)
Fig. 5.14 – Perturbation de l’air dans un tube
Considerons maintenant, une petite tranche du fluide situee, a l’instant t, entre les abscissesx et x + δx (Fig. 5.14b). Considerons cette meme tranche de fluide a l’instant t + δt : elle s’estdeplacee et occupe la tranche entre les abscisses x + v(x, t) δt et x + δx + v(x + δx, t) δt (Fig.

5.3. EQUATION DES ONDES DANS UN TUBE 129
5.14c). Ecrivons que la masse de cette tranche de fluide est conservee quand on passe de t at + δt :
(ρ0 + ρ(x, t + δt))S δx− (ρ0 + ρ(x, t))S δx
= (ρ0 + ρ(x, t)) v(x, t) δt S − (ρ0 + ρ(x + δx, t)) v(x + δx, t) δt S
Dans le premier membre, le premier terme membre est la masse, au signe pres, de la trancherepresentee sur la figure 5.14c, et le second terme correspond a la masse de la tranche x a x+ δxde la figure (14-b). Dans ces deux termes, on a neglige la variation de ρ par rapport a l’abscissex, cette variation correspondant a un terme infiniment petit en (δx)2. Dans le second membre, lepremier terme est la quantite de fluide qui entre dans la tranche representee sur la figure 5.14c,tandis que le second terme represente la quantite qui en sort. On simplifie par S, on neglige lesproduits des deux infiniment petits ρ et v, et on peut reecrire l’equation ci-dessus sous la forme :
(ρ0 + ρ(x, t + δt)) δx− (ρ0 + ρ(x, t)) δx
= (ρ0 + ρ(x, t)) v(x, t) δt− (ρ0 + ρ(x + δx, t)) v(x + δx, t) δt + ρ(x, t + δt) δx + ρ(x, t) δx
= ρ0 v(x, t) δt− ρ0 v(x + δx, t) δt
−ρ(x, t) + ρ(x, t + δt)δt
= ρ0v(x, t)− v(x + δx, t)
δx
On fait tendre δt et δx vers zero. D’ou :
∂ρ(x, t)∂t
= −ρ0∂v(x, t)
∂x(5.14)
Nous ecrivons maintenant la loi fondamentale de la dynamique pour la petite tranche defluide x a x+δx de la figure 5.14b le produit de sa masse ρ0 S δx par son acceleration ∂v(x, t)/∂test egale a la somme des forces exercees sur cette tranche. Au niveau des forces, il y a les forcesde pression p(x, t) appliquees sur la section d’abscisse x, lesquelles sont dans la direction des xpositifs, et les forces de pression p(x+δx, t) appliquees sur la section d’abscisse x+δx, lesquellessont dans la direction des x negatifs.
ρ0 S δx∂v(x, t)
∂t= S p(x, t)− S p(x + δx, t)
On simplifie par S et on divise cette equation par δx et on fait tendre δx vers zero. Il vient :
ρ0∂v(x, t)
∂t= −∂p(x, t)
∂x(5.15)
Il nous reste a traduire une propriete donnee par l’observation et l’experience : l’accroisse-ment de la pression p(x, t) est proportionnel a l’acroissement de la masse volumique ρ(x, t). Lecoefficient de proportionnalite est positif et est suppose constant. On ecrit :
p(x, t) = c2 ρ(x, t) (5.16)
Les dimensions d’une masse, d’une longueur et d’un temps sont notees M, L et T. Ainsi ladimension de ρ(x, t) est M L−3 et celle de p(x, t) est M L−1 T−2. La dimension de c2 est doncL2 T−2 et celle de c est LT−1. Donc c est une vitesse.
En tenant compte de (5.16), l’equation (5.14) devient :
1c2
∂p(x, t)∂t
= −ρ0∂v(x, t)
∂x⇒ ∂p(x, t)
∂t= −ρ0 c2 ∂v(x, t)
∂x
Derivons par rapport a t :
∂2p(x, t)∂t2
= −ρ0 c2 ∂
∂t
(∂v(x, t)
∂x
)= −ρ0 c2 ∂
∂x
(∂v(x, t)
∂t
)= −ρ0 c2 ∂
∂x
(− 1
ρ0
∂p(x, t)∂x
)

130 CHAPITRE 5. ACOUSTIQUE
en utilisant (5.15). Finalement on a :
∂2p(x, t)∂t2
− c2 ∂2p(x, t)∂x2
= 0 (5.17)
Conclusion
L’equation (5.17) est une equation pour les fluctuations de pression dans le tube. L’air vibredans le tube. Il est a remarquer que cette equation est identique a celle (5.9) etablie pour lesvibrations d’une corde. Naturellement les solutions (S1) et (S2) sous forme d’ondes propagativesdonnees dans le paragraphe 5.2.3 sont valables ici.
5.3.2 Conditions aux limites
L’objectif de ce paragraphe est de preciser l’influence des « conditions aux limites » sur lesvibrations de l’air dans un tube, car le tube n’est pas, en general infiniment long.
Une experience simple de vibration dans un tube peut etre faite : on souffle a une extremitedu tube et on peut constater que le son produit n’est pas le meme si l’autre extremite estmaintenue ouverte ou fermee.
On considere un tube de longueur `. L’axe du tube est aligne avec l’axe (O, x). Les extremitesdu tube correspondent aux sections de coordonnees x = 0 et x = `. On envisage les trois cassuivants, illustres sur la figure 5.15 :
(a) tube ferme en ses deux extremites ;(b) tube ouvert a ses deux extremites ;(c) tube ferme en x = 0 et ouvert en x = `.
O
O
O
`
`
`
x
x
x
(a)
(b)
(c)
Fig. 5.15 – Tube ouvert ou ferme en ses extremites
On note p(x, t) la fluctuation de pression, appelee aussi « pression acoustique ». La fonctionp(x, t) verifie l’equation (5.17). Les conditions aux limites du tube s’ecrivent :
1) pour un tube ferme a une extremite d’abcisse x = x0 :
∂p(x, t)∂x
]x=x0
= 0 ∀t (5.18)
Cette condition s’obtient a partir de la condition qu’il est naturel d’ecrire pour la vitesse (lavitesse v(x, t) est nulle en x = x0) et en utilisant l’equation (5.15) traduisant la loi fondamentalede la dynamique.
2) pour un tube ouvert a une extremite d’abcisse x = x0 :
p(x0, t) = 0 ∀t (5.19)

5.3. EQUATION DES ONDES DANS UN TUBE 131
Dans le cas du tube ouvert, on suppose en effet que la fluctuation de pression diminue tresrapidement a la sortie du tube, de sorte que l’on peut supposer que la pression acoustique p(x, t)a la sortie du tube est nulle (il s’agit d’une approximation).
5.3.3 Calcul des modes stationnaires dans un tube
On considere un tube de longueur `, dont l’axe est aligne avec l’axe (O, x) et dont lesextremites ont pour abscisses x = 0 et x = `.
Pour obtenir les modes stationnaires, on peut proceder de la meme maniere que dans leparagraphe 5.2.7, en ecrivant l’onde incidente f(x−c t), en deduisant l’onde reflechie, en utilisantla condition aux limites en x = 0, puis en utilisant la seconde condition aux limites en x = `,pour montrer que seulement certaines frequences peuvent exister.
On peut egalement proceder autrement, et c’est ce que nous ferons ci-apres. On cherche unesolution harmonique sous la forme generale suivante :
p(x, t) = A sin(k x + ϕ) cos(ω t) avec ω = c k (5.20)
1) On suppose le tube ouvert en ses deux extremites x = 0 et x = `.Il est facile de verifier que l’expression donnee en (5.20) verifie l’equation des ondes (5.17)
(l’etudiant peut facilement faire cette verification). On ecrit ensuite les conditions aux limitesen x = 0 et x = ` (condition (5.19)) :
sin(ϕ) cos(ωt) = 0 ∀t, sin(k ` + ϕ) cos(ω t) = 0 ∀t
A partir de la premiere condition on trouve sin(ϕ) = 0, soit ϕ = 0. La seconde conditionconduit ensuite a sin(k `) = 0, d’ou k ` = n π avec n entier. On a donc pour resultat :
p(x, t) = A sin(kn x) cos(ωn t), kn =n π
`, ωn = c kn =
n π c
`, fn =
c kn
2 π=
c n
2 `
Pour ce cas ou les conditions aux limites imposent la pression nulle aux deux extremites dutube, on est donc exactement dans le meme cas que pour la corde fixee en ses deux extremites.Il suffit de substituer p au deplacement u dans les resultats du paragraphe 5.2.7. Les quatrepremieres harmoniques sont identiques a celles representees sur la figure 5.12.
Chaque solution est appelee onde harmonique ou mode propre. Pour n = 1, l’ondeharmonique est dite fondamentale, et le mode propre est dit fondamental.
2) On suppose le tube ferme en ses deux extremites x = 0 et x = `.Nous reprenons l’expression (5.20), laquelle verifie l’equation des ondes (5.17). Puis on ecrit
les conditions aux limites en x = 0 et x = ` (condition (5.18)). En x = 0, on a :[∂
∂x(A sin(k x + ϕ) cos(ω t))
]x=0
= 0 ∀t, [A cos(k x + ϕ) cos(ω t)]x=0 = 0 ∀t
d’ou :cos(ϕ) cos(ω t) = 0 ∀t
cos(ϕ) = 0, soit ϕ = π/2
La seconde condition en x = ` conduit a :[∂
∂x(A sin(k x + π/2) cos(ω t))
]x=`
= 0 ∀t, [A cos(k x + π/2) cos(ω t)]x=` = 0 ∀t
d’ou :cos(k ` + π/2) cos(ω t) = 0 ∀t

132 CHAPITRE 5. ACOUSTIQUE
soit k ` = n π avec n entier. Comme sin(k x + π/2) = cos(k x), on a pour resultat :
p(x, t) = A cos(kn x) cos(ωn t), kn =n π
`, ωn = c kn =
n π c
`, fn =
c kn
2 π=
c n
2 `
Chaque solution est appelee onde harmonique ou mode propre. Pour n = 1 l’ondeharmonique est dite fondamentale et le mode propre est dit fondamental.
Sur la figure 5.16, on a dessine le profil de l’onde pour les plus petites valeurs de kn, quicorrespondent a n = 1, n = 2, n = 3 et n = 4.
n = 1, cos(π x/L) n = 2, cos(2π x/L)
n = 3, cos(3 π x/L) n = 4, cos(4π x/L)
Fig. 5.16 – Les quatre premieres harmoniques dans un tube ouvert a ses deux extremites
3) Application numeriqueOn peut calculer les modes propres dans le cas d’un tube de longueur ` = 0.24 m, sachant que
la frequence fondamentale est f1 = 354 Hz. Dans les deux cas, tube ouvert en ses deux extremitesou bien tube ferme en ses deux extremites, on a : f2 = 2× f1 = 708 Hz, f3 = 3× f1 = 1062 Hz,etc.
Cherchons a calculer la longueur d’un tube ouvert en ses deux extremites, pour lequel lafrequence fondamentale est f1 = 523 Hz (frequence de la note « do »), et sachant que la vitessede propagation du son dans l’air est c = 331 m.s−1 (vitesse dans l’air sec et a 20◦C). On ecrit :f1 = c/(2 `) d’ou : ` = c/(2 f1) = 331/(2× 523) = 0.316 m, soit ` = 31.6 cm.
5.4 Equation des ondes dans l’espace a trois dimensions
5.4.1 Quelques definitions dans le domaine de l’acoustique
La propagation du son, et du bruit, se fait dans l’espace physique qui nous environne, c’est-a-dire dans un espace a trois dimensions. Nous allons donc etendre a l’espace a trois dimensionscertaines notions vues precedemment. Nous commencons par preciser quelques definitions.
Energie acoustique. Une source sonore diffuse de l’energie acoustique, mesuree en joules (J).La dimension de cette energie est M L2 T−2.
Puissance acoustique. La puissance acoustique est la quantite d’energie delivree par unitede temps, elle se mesure en watt (W). Une source de puissance 1 W delivre 1 joule par seconde.Sa dimension est M L2 T−3.

5.4. EQUATION DES ONDES DANS L’ESPACE A TROIS DIMENSIONS 133
Intensite acoustique. L’intensite acoustique est la quantite d’energie qui passe en un pointpar unite de surface et par unite de temps. Elle se mesure en W/m2. L’intensite au seuil d’au-dition, c’est-a-dire, l’intensite minimale a laquelle l’oreille est sensible est Iref = 10−12 W/m2 a1000 Hz, (c’est une valeur mesuree experimentalement).
Pression acoustique. La pression sur une surface d’aire S est definie comme le rapport F/Sou F est la force qui s’exerce sur la surface. La pression, notee p, est une force par unite de surfacemesuree en pascal (Pa). Sa dimension est M L−1 T−2. Rappelons que la pression acoustique estune fluctuation de pression.
Niveau sonore. Le niveau sonore rend compte de l’amplitude reelle des ondes acoustiques(amplitude de la pression acoustique) ainsi que de la maniere – subjective – dont le son estpercu. Le niveau sonore, note L, s’exprime en « decibels » (dB), et est defini comme :
L = 10 lgI
Iref(5.21)
ou I et Iref sont respectivement l’intensite acoustique de l’onde et l’intensite au seuil d’audition1.On remarquera que I = Iref correspond a un niveau sonore nul.
5.4.2 Source ponctuelle
Soit une source ponctuelle d’ondes acoustiques placee au point O (Fig. 5.17). On supposeque cette source emet la meme quantite d’energie, et delivre la meme puissance, dans toutesles directions. On dit que c’est une source ponctuelle « omnidirectionnelle ». La symetrie duprobleme nous suggere de travailler avec un systeme de coordonnees spheriques (r, θ, ϕ), ou rest la distance du point considere M au centre O de la source, et ou θ et ϕ sont deux anglescaracterisant la direction du vecteur
−−→OM . Dans la mesure ou la source est « omnidirectionnelle »,
la pression est necessairement independante de θ et ϕ, autrement dit, p ne depend que de r ett : p = p(r, t).
z
surface ∆Sy
M
r
O x
Fig. 5.17 – Source ponctuelle de centre O
Dans les parties 5.2 et 5.3, nous avons determine l’equation des ondes transversales (5.9)dans une corde, et l’equation des ondes (5.17) dans un tube. Ces equations ont la forme generale
1Le logarithme decimal de x se note : lg(x) ou log10(x).

134 CHAPITRE 5. ACOUSTIQUE
de l’equation des ondes a une dimension. Dans le paragraphe 5.2.3, on a vu que ses solutionssont de la forme : (S1) : U1(x + c t) = f(x + c t) ou (S2) : U2(x − c t) = g(x − c t), ou f et gsont deux fonctions d’une seule variable, ou bien une combinaison lineaire de U1(x + c t) et deU2(x− c t).
En trois dimensions, pour une source ponctuelle omnidirectionnelle, la generalisation del’equation de propagation (5.9) ou (5.17) est (resultat admis) :
∂2p(r, t)∂t2
− c2
r
∂2(rp(r, t))∂r2
= 0 (5.22)
La forme des solutions (S1) et (S2) peut etre generalisee au cas tridimensionnel. On chercherades solutions de la forme (S1′) : p1(r, t) = P1(r) f(r + c t) et (S2′) : p2(r, t) = P2(r) g(r− c t), ouf et g sont deux fonctions d’une seule variable, et ou P1(r) et P2(r) sont des fonctions de r adeterminer.
Les ondes (S1′) en r + c t sont des ondes convergentes. La propagation se fait en directionde la source O. Les ondes (S2′) en r − c t sont des ondes divergentes. La propagation se fait ens’eloignant de la source O. Dans le cas de la source ponctuelle dans un milieu infini, les solutionsde la forme (S1′) ne peuvent pas exister : les ondes convergentes n’existent pas a l’exterieur dela source. On ne trouve donc que des ondes divergentes, qui s’eloignent de la source.
Solution particuliere de l’equation des ondes (5.22)
Considerons la fonction p2(r, t) = P2(r) g(r − c t) avec P2(r) = A/r ou A est une constante.On a :
p2(r, t) = Ar g(r − c t),
∂p2(r, t)∂t
= −cA
rg′,
∂2p2(r, t)∂t2
= c2 A
rg′′
r p2(r, t) = A g(r − c t),∂(r p2(r, t))
∂r= A g′,
∂2(r p2(r, t))∂r2
= A g′′
Les notations « ′ » et « ′′ » designent les derivees premiere et seconde de la fonctiong(z) de laseule variable z. Par suite, on verifie que l’equation (5.22) est satisfaite. Il faut bien noter quep2(r, t) = (A/r) g(r − c t) est une solution particuliere de l’equation des ondes (5.22) ; ce n’estpas la solution la plus generale.
Soit une petite surface d’aire ∆S centree au point M et perpendiculaire a la direction duvecteur
−−→OM (Fig. 5.17). Soit ∆E = e(r) ∆S la quantite d’energie qui traverse la surface ∆S, ou
e(r) est la quantite d’energie qui traverse l’unite de surface. On peut calculer la quantite totaled’energie qui traverse une surface spherique centree en O et de rayon r, en integrant e(r) sur lasurface de cette sphere. On trouve donc que la quantite totale d’energie traversant une surfacespherique de rayon r est, car la surface de la sphere de rayon r est 4 π r2 :
E(r) = 4 π r2 e(r)
L’energie E(r) distribuee sur la surface de la sphere de rayon r et transportee par l’ondespherique est conservee. Donc E(r) est une constante par rapport a r, soit E(r) = E avec Econstant. En d’autres termes, toute l’energie de l’onde est concentree sur la surface de la spherede rayon r, et cette energie se conserve. On a :
e(r) =E
4 π r2
Donc e(r) est proportionnel a 1/r2 : e(r) ∝ 1/r2.En admettant que la densite d’energie e(r) transportee par les ondes est proportionnelle au
carre de la pression acoustique p2(r, t), on trouve que p2(r, t) est proportionnel a 1/r.On retrouve ainsi l’expression de la solution particuliere de l’equation des ondes (5.22),
p2(r, t) = (A/r) g(r − c t), etablie au debut de ce paragraphe.

5.4. EQUATION DES ONDES DANS L’ESPACE A TROIS DIMENSIONS 135
5.4.3 Intensite acoustique, niveau sonore
Rappelons que l’intensite acoustique est la quantite d’energie qui passe en un point parunite de surface et par unite de temps (voir 5.4.1). L’intensite acoustique, I(r) est donc propor-tionnelle a e(r). Donc, d’apres le paragraphe precedent :
I(r) ∝ 1r2
(5.23)
D’apres (5.21), on peut ecrire pour le niveau sonore a la distance r de la source ponctuelleO est :
L(r) = 10 lgI(r)Iref
(5.24)
Application
Miles Davies joue de sa trompette dans son (tres grand) jardin. A r0 = 1 m de la source,le niveau sonore est de 80 dB. Cherchons le niveau sonore a 10 m de la source. La sourceomnidirectionnelle sert de modele pour la trompette. Il faut utiliser les relations (5.23) et (5.24),en exprimant les distances en metres. On a :
L(r) = 10 lgI(r)Iref
, L(r0) = 10 lgI(r0)Iref
sachant que :I(r)I0
=r20
r2
il vient :
L(r)− L(r0) = 10 lgI(r)I0
= 10 lgr20
r2= −20 lg
r
r0
L(r) = L(r0)− 20 lgr
r0= 80− 20 lg(10) = 80− 20 = 60 dB
Il faut noter que, meme dans un tres grand jardin, on n’est pas exactement dans les conditionsou il suffit, pour modeliser la trompette, de considerer une source ponctuelle. L’effet de ladirectivite de la source (la trompette ici) n’est pas pris en compte ; de meme que l’effet de lareflexion des ondes sur le sol. On a aussi neglige l’attenuation intrinseque de l’air.
Toujours avec les memes hypotheses, cherchons a quelle distance rlim, on est certain de neplus entendre la trompette. Le niveau sonore sera nul pour I(r) = Iref, c’est-a-dire au seuild’audition. Il s’agit donc de trouver rlim tel que :
L(r0)− L(rlim) = 10 lgI(r0)
I(rlim)= 10 lg
r2lim
r20
L(rlim) = L(r0)− 10 lgr2lim
r20
= 80− 10 lgr2lim
1= 80− 20 lg(rlim) = 0
lg(rlim) =8020
= 4, rlim = 10 000 m = 10 km
Cette distance n’est pas realiste, il faut toujours tenir compte de l’attenuation.
5.4.4 Notions sur la gene due au bruit
Le domaine auditif est tres large puique l’oreille est capable de percevoir des sons dont laplage de variation des pressions acoustiques est comprise entre la pression acoustique 2×10−5 Pacorrespondant au seuil de douleur et 20 Pa correspondant au seuil d’audition. La sensibilite de

136 CHAPITRE 5. ACOUSTIQUE
102 103 1040
(dB)
f (Hz)
120
100
80
60
40
20
limite supérieure de perception,seuil de douleur
seuil deperception
INFRASONS
ULTRASONS
HHHj
-
��
�
pd = 200 Pa, vd ≈ 0, 5 m.s−1, ξd ≈ 10−4 m
����*
ps = 2× 10−5 Pa, vs ≈ 5× 10−8 m.s−1, ξs ≈ 10−11 m
Fig. 5.18 – Domaine audible
l’oreille humaine depend aussi de la frequence. Le champ auditif chez l’homme est representesur la figure 5.18. On mesure le niveau sonore en decibels (voir 5.4.3).
Sur la Table 5.3, de meme que sur la figure 5.19, nous avons indique les pressions acoustiqueset les niveaux sonores de quelques bruits usuels (extraits du livre « Acoustique generale », C.Potel et M. Bruneau, Ellipse, Paris, 2006).
Tab. 5.3 – Niveaux sonores et bruits usuels correspondant a certaines pressions acoustiques
Pression acoustique (Pa) Niveau sonore (dB) Bruit usuel correspondant200 140 seuil de douleur20 120 avion au decollage2 100 train dans une gare
0.2 80 trafic routier0.02 60 conversation0.002 40 chambre a coucher0.0002 20 bruissement des feuilles0.00002 0 seuil d’audibilite

5.4. EQUATION DES ONDES DANS L’ESPACE A TROIS DIMENSIONS 137
Fig. 5.19 – Exemples de niveaux de bruits

138 CHAPITRE 5. ACOUSTIQUE
5.5 Acoustique : Exercices avec correction
Objectif. Dans ce chapitre « Acoustique », beaucoup d’exemples ont ete donnes. Aussi lenombre d’exercices avec corriges presentes ci-apres est reduit. Ce sont des applications directesdu cours. Ils illustrent deux aspects du cours : • les vibrations transversales d’une corde (exercice1), • le niveau sonore (exercice 2).
5.5.1 Exercice 1 : Vibration transversale d’une corde fixee en ses deux extre-mites
On considere une corde de longueur `. Cette corde est etalee le long de l’axe Ox et est fixeeen ses deux extremites x = 0 et x = ` (Fig. 5.20). On note u(x, t) le deplacement transversal al’instant t du point d’abscisse x de la corde, et on s’interesse aux ondes transversales dans cettecorde. On rappelle que u(x, t) verifie l’equation des ondes :
∂2u
∂t2= c2 ∂2u
∂x2
ou c est la vitesse des ondes dans la corde (nous supposons que c est une constante).
mur mur
O ` x
corde
Fig. 5.20 – Corde fixee en ses deux extremites
1. Verifier que u(x, t) = A sin(k x) cos(ω t), verifie l’equation des ondes, sachant que ω = k c.
2. Quelle condition aux limites doit-on ecrire pour le eplacement u(x, t) en x = 0? L’expres-sion pour u(x, t) donnee dans la question 1) verifie t-elle cette condition ?
3. Quelle condition aux limites doit-on ecrire pour le deplacement en u(x, t) en x = ` ?Comment doit-on choisir k pour que cette condition aux limites soit verifiee ?
4. Determiner les solutions (ondes harmoniques) verifiant l’ensemble de l’equation des ondeset des deux conditions aux limites en x = 0 et en x = `.
5. On suppose que cette corde est la corde de piano donnant le « la » de frequence 439.9 Hz.Cette corde a pour longueur ` = 420 mm, pour diametre d = 1 mm et est constitueed’acier de masse volumique ρ = 7860 kg.m−3.Calculer la masse lineique µ de la corde.Sachant que la frequence fondamentale est de 439.9 Hz, calculer la vitesse des ondes c.On rappelle que la vitesse de propagation c des ondes transversales est dans une corde estc =
√T /µ ou µ est la masse lineique et T est la tension dans la corde.
Quelle tension T , l’accordeur doit-il imposer pour obtenir la frequence de 439.9 Hz ?

5.5. ACOUSTIQUE : EXERCICES AVEC CORRECTION 139
Corrige
1. Il est facile de verifier que :
∂2u
∂t2= −A ω2 sin(k x) cos(ω t),
∂2u
∂x2= −A k2 sin(k x) cos(ω t)
Ainsi, sachant que ω = k c, l’equation des ondes est verifiee.2. Comme sin(k x) est nul en x = 0, on a bien u(0, t) = 0 pour tout t.3. La condition aux limites en x = ` implique sin(k `) cos(ω t) = 0 pour tout t. Donc sin(k `) =
0, et par suite : k ` = n π avec n nombre entier positif.4. Les solutions de l’equation des ondes verifiant les deux conditions aux limites en x = 0 et
en x = ` sont donc :
u(x, t) = A sin(kn x) cos(ωn t), avec kn = n π, ωn = kn c
On a ainsi une infinite de solutions harmoniques.5. La masse lineique de la corde est : µ = π (d2/4) ρ, soit : µ = 3.14 × (0.001/2)2 × 7860 =
6173× 10−6 kg.m−1.La frequence fondamentale est f1 = c/(2 `) = 439.9 Hz. Donc c = 2 ` f1 = 2 × 0.420 ×439.9 = 369.5 s−1.La tension T que doit imposer l’accordeur pour obtenir la frequence f1 est donc : T =µ c2 = 6173× 10−6 × 369.52 = 842.8 N.
5.5.2 Exercice 2 : Bruit d’un aeroport
Le niveau sonore, note L, est defini comme : L = 10 lg(I(r)/Iref), ou r est la distance mesureeentre la source du bruit et l’endroit ou est faite la mesure de L (r est exprimee en metres).
On rappelle que l’intensite acoustique I(r) est proportionnelle a 1/r2.On considere un aeroport. A 100 m de celui-ci, les mesures donnent un niveau de bruit egal
a 125 dB.
1. Une personne P est a 5 km de cet aeroport. Quel niveau de bruit percoit-elle ?2. A quelle distance de l’aeroport, cette personne doit-elle etre pour avoir un niveau de bruit
nul ?
Corrige
1. On a : 10 lg(I(100)/Iref) = 125 dB a 100 m et L = 10 lg(I(5000)/Iref) a 5000 m.La personne P percoit donc le bruit L tel que :
L− 125 = 10 lg(I(5000)/Iref)− 10 lg(I(100)/Iref);L = 10 lg(I(5000)/I(100)) = 20 lg(100/5000) = 20 lg(1/50) = −20 lg(50);L = 34 dB
2. La personne a un niveau de bruit nul, lorsqu’elle se trouve a la distance r telle que :10 lg(I(r)/Iref)− 10 lg(I(100)/Iref) = (0− 125) dB, soit : 20 lg(100/r) = −125, soit fina-lement :
lg(r)− lg(100) = 125/20 = 6.25, lg(r) = 6.25 + 2 = 8.25
r ∼= 1.8× 108 m = 18 000 km
Cette distance est tres grande et n’est pas realiste : il faut tenir compte des phenomenesd’attenuation dans l’air (dus a la viscosite notamment).

140 CHAPITRE 5. ACOUSTIQUE
102 103 104
120
100
80
60
40
20
0
niveau (dB)
f (Hz)
zone de sensibilité
seuil de douleur
seuil d’audition
120
100
80
60
40
20
0 phone
Fig. 5.21 – Diagramme de Fletcher et Munson

Annexe A
Vecteurs et reperes de l’espace
(D’apres Philippe Gatignol & Catherine Potel, Mecanique, Polycopie, Universite Technologiquede Compiegne, 1997)
Les points importants de ce chapitre sont :– La notion de vecteur libre– L’orientation de l’espace– La projection des vecteurs sur une base– Les systemes de coordonnees
A.1 Vecteurs libres. Orientation de l’espace
L’usage des vecteurs en mecanique est fondamental. Il permet de representer les vitesses et lesaccelerations des points, les rotations des solides, les forces exercees ainsi que leurs moments, etc.Plusieurs types de vecteurs sont introduits parmi lesquels les vecteurs lies et les vecteurs libres.Nous introduirons a propos des forces le concept de vecteur glissant. Enfin, certains vecteurstels que les vecteurs rotation ont une definition qui depend du choix de l’orientation de l’espace.Il est donc essentiel avant tout de bien distinguer ces diverses notions.
A.1.1 Vecteurs lies, vecteurs libres
On peut donner des concepts de vecteurs lies et de vecteurs libres des definitions mathema-tiques rigoureuses construites sur des bases algebriques (classes d’equivalence, espace quotient).Nous nous contenterons d’en donner une description geometrique qui sera pour nous tout a faitsuffisante.
A.1.1.1 Vecteurs lies - Equipollence - Vecteurs libres
Definition A.1 On appelle vecteur lie un couple ordonne (A,A′) de points de l’espace. As’appelle l’origine ; A′ l’extremite du vecteur.
Definition A.2 Deux vecteurs lies (A,A′) et (B,B′) sont dits equipollents si le quadrilatereABB′A′ est un parallelogramme (voir Fig. A.1).
Etant donne un vecteur lie (A,A′), il lui correspond une infinite de vecteurs lies qui lui sontequipollents ; ceux-ci sont parfaitement determines.
Definition A.3 On dit que l’ensemble des vecteurs lies equipollents a un vecteur (A,A′) donneconstitue un vecteur libre ~V . Le vecteur lie (A,A′) est appele representant du vecteur libreainsi defini.
141

142 ANNEXE A. VECTEURS ET REPERES DE L’ESPACE
Tout autre vecteur lie (B,B′) equipollent a (A,A′) represente egalement le vecteur libre ~V .
Remarque 1. La representation geometrique d’un vecteur lie est tres simple : on dessine lesegment AA′ muni d’une fleche indiquant son extremite (voir Fig. A.1). Par contre, il n’est paspossible de representer directement un vecteur libre. On utilise toujours pour cela l’un de sesrepresentants, dont on choisit souvent l’origine en un point particulier de l’espace.
Par contre, les operations que nous introduirons au paragraphe A.2, et les calculs algebriquesqui en resultent, porteront toujours sur des vecteurs libres.
A
A′
B
B′
Fig. A.1 –
On peut resumer en disant qu’on n’effectue d’operations que sur des vecteurs librestandis qu’on ne peut dessiner que des vecteurs lies.
Remarque 2. La definition des vecteurs libres dont nous aurons besoin fera souvent referencea un point de l’espace : vitesse du point M , moment d’une force en un point P . Il sera alorsfrequent de representer de tels vecteurs libres par le vecteur lie ayant pour origine le pointconsidere. Mais il ne faudra pas perdre de vue que le concept mathematique introduit est celuide vecteur libre et qu’il pourra entrer dans des expressions algebriques.
Remarque 3. On note un vecteur libre de la maniere suivante : ~V ou−−→AA′, cette deuxieme
notation faisant explicitement reference au vecteur lie (A,A′) representant le vecteur libre.
A.1.1.2 Elements caracteristiques d’un vecteur libre
Definition A.4 On appelle direction de droite (δ) l’ensemble des droites paralleles a l’uned’entre elles.
Sur la droite, ou sur l’une quelconque de ses paralleles, deux sens de parcours sont possibles.Lorsqu’un tel sens est choisi, on dit que l’on a oriente la droite.
Definition A.5 On appelle direction de droite orientee (~δ ) l’ensemble des droites parallelesa une droite orientee et ayant meme orientation qu’elle.
Longueur d’un segment. L’introduction d’une longueur de reference (unite) permet, parcomparaison, de definir la longueur de tout segment AA′ de l’espace.
L’unite de longueur du systeme international est le metre.
Definition A.6 Le metre est la longueur du trajet parcouru dans le vide par la lumiere pendantune duree de 1/299792458 seconde.

A.1. VECTEURS LIBRES. ORIENTATION DE L’ESPACE 143
Vecteur libre. Un vecteur libre ~V , tel qu’il a ete defini au paragraphe A.1.1.1 a partir d’unvecteur lie (A,A′), peut etre caracterise par la donnee :• d’une direction de droite orientee qui precise
– la direction du vecteur, celle de la droite (AA′).– le sens du vecteur, celui de A vers A′.• d’une longueur (nombre arithmetique) qui precise
– le module du vecteur, egal a la longueur AA′.
Notation :∣∣ ~V
∣∣ ou∥∥ ~V
∥∥Definition A.7 L’angle de deux vecteurs libres (dans l’espace) est l’angle de leurs di-rections de droite orientees, c’est-a-dire un angle arithmetique compris entre 0 et π.
Notation :(~V , ~V ′
)=
(~δ, ~δ′
)Remarque. Il n’est pas possible d’affecter un signe a un tel angle (contrairement a ce quel’on saura faire dans un plan oriente). L’ordre des vecteurs, ou de leurs directions orientees, estsans importance pour la definition de cet angle (Figs. A.2a et A.2b). L’angle de deux vecteurslibres dans l’espace est parfaitement defini par la donnee de son cosinus (le cosinus est positif sil’angle est aigu, cas Fig. A.2a, et negatif s’il est obtus, cas Fig. A.2b). Par contre, le sinus estpositif dans tous les cas, mais une valeur du sinus correspond a deux cas de figure possibles.
A A
θ
θ(~δ) (~δ)
(~δ′)(~δ′)
(a) (b)
Fig. A.2 –
Vecteurs libres particuliers
– vecteur nul ou vecteur « zero », ~0 : son module est nul, sa direction ainsi que son sens sontindetermines.
– vecteur unitaire : tout vecteur dont le module est egal a 1 : ‖~e ‖ = 1– vecteurs orthogonaux : deux vecteurs dont l’angle est egal a π/2 : (~ex, ~ey) = π/2
A.1.1.3 Vecteurs glissants ou glisseurs
La representation geometrique des forces, telle qu’elle sera decrite dans les chapitres du cours,fait appel au concept de vecteur glissant defini ci-dessous.
Definition A.8 On appelle vecteur glissant, ou glisseur, l’ensemble des vecteurs lies equi-pollents a un vecteur lie (A,A′) et situes sur la droite (AA′).
Il s’agit donc d’une notion intermediaire entre le vecteur lie et le vecteur libre.

144 ANNEXE A. VECTEURS ET REPERES DE L’ESPACE
Elements caracteristiques d’un glisseur. (Fig. A.3) Un glisseur, tel qu’il vient d’etredefini, peut etre caracterise par les elements suivants :• une droite orientee definissant
– le support du glisseur, a savoir la droite (AA′)– le sens du glisseur, a savoir le sens de A vers A′ sur la droite (AA′)• un nombre arithmetique definissant le module du glisseur, a savoir la longueur du segment
AA′
A
A′
B
B′
∆
Fig. A.3 –
Designation d’un glisseur. Un glisseur est parfaitement connu des lors que l’on indique unpoint A de son support et le vecteur libre ~V associe au vecteur lie (A,A′). On designera doncsouvent un glisseur par la notation {A, ~V }.
A.1.2 Orientation de l’espace
Pour reperer la position de points ou d’objets dans l’espace, il est necessaire d’introduiredes grandeurs algebriques, telles que les abscisses ou les angles. La definition du signe de cesgrandeurs fait appel a des conventions d’orientation qu’il faut bien comprendre.
Ainsi, la position d’un point sur une droite est definie par son abscisse relativement a unpoint origine. Le signe de cette abscisse depend du choix qui est fait pour l’orientation de ladroite. On a rappele au paragraphe A.1.1 qu’il y avait deux choix d’orientation possibles surune droite. Lorsque l’origine et l’orientation sont choisies sur une droite, on dit qu’on a definiun axe.
De meme, un plan donne est susceptible de recevoir deux orientations. Nous reviendrons surcette question au paragraphe A.1.3.
L’orientation de l’espace a trois dimensions fait appel a l’observation des triplets ordonnesde vecteurs libres, ou de vecteurs lies mais de meme origine, non coplanaires. Les figures A.4a etA.4b representent deux triplets ordonnes
(~V1, ~V2, ~V3
)et
(−→W 1,−→W 2,−→W 3
). Ces deux triplets sont
de nature opposee dans le sens suivant : pour le premier, un observateur situe sur le vecteur ~V3
(dans le sens de ce vecteur) et qui regarde dans le sens du vecteur ~V1 voit le vecteur ~V2 pointervers sa gauche ; pour le deuxieme triplet, l’observateur situe sur
−→W 3 et regardant vers
−→W 1 voit−→
W 2 vers sa droite. Il est clair qu’il n’y a, pour un triplet ordonne, que ces deux possibilites.
Definition A.9 Orienter l’espace, c’est choisir entre ces deux categories de triplets or-donnes celle dont les triplets seront consideres comme positifs (ou directs). Les triplets ordonnes

A.1. VECTEURS LIBRES. ORIENTATION DE L’ESPACE 145
de l’autre categorie sont alors dits negatifs (ou retrogrades).
Il est d’usage de choisir pour triplets positifs ceux qui correspondent a la disposition dela figure A.4a) (triplets senestrorsum). On y fait reference en physique en parlant de la regledu« tire-bouchon » ou du « bonhomme d’Ampere ».
gauche
droite
(a) (b)
Fig. A.4 –
Nous ferons appel frequemment a cette convention d’orientation. Elle sera necessaire a ladefinition du produit vectoriel de deux vecteurs libres. Dans le paragraphe suivant, elle permetd’associer l’orientation d’un plan de l’espace a celle choisie sur une droite perpendiculaire a ceplan.
A.1.3 Plan oriente. Angles algebriques
Orientation de l’espace a deux dimensions. En geometrie plane, on travaille sur la « feuillede papier » ou sur le « tableau ». Deux sens de rotation sont possibles : le sens « des aiguillesd’une montre » et le sens oppose (sens trigonometrique). Orienter le plan consiste a choisir l’unde ces deux sens afin d’evaluer algebriquement les angles. La convention habituelle consiste achoisir le sens trigonometrique.
Orientation d’un plan dans l’espace a trois dimensions. La convention precedente n’acependant plus de sens lorsque le plan considere est situe dans l’espace. Il peut alors etre re-garde d’un cote ou de l’autre, et ce qui correspond au sens des aiguilles d’une montre pour unobservateur situe d’un cote sera le sens oppose pour un observateur situe de l’autre cote (Fig.A.5). C’est la raison pour laquelle nous n’avons pas pu, au paragraphe A.1.1.2, affecter un signea l’angle de deux directions orientees ou de deux vecteurs libres dans l’espace.
Fig. A.5 –
On orientera donc un plan de l’espace en precisant d’abord quel est le demi-espace d’ou ilfaut regarder ce plan. Pour ce faire, on choisit sur une droite normale au plan une orientation.Le demi-espace d’observation est alors celui vers lequel « pointe » la droite orientee (Fig. A.6)

146 ANNEXE A. VECTEURS ET REPERES DE L’ESPACE
telle que Oz. L’orientation du plan, vu de ce demi-espace, est alors definie usuellement par laconvention du sens trigonometrique. On marque ce choix par la consideration des deux axesordonnes Ox et Oy tels que l’angle algebrique (Ox, Oy) soit egal a +π/2 pour l’orientation ainsichoisie.
On remarquera qu’avec ces conventions, le triplet ordonne des directions orientees (Ox, Oy,Oz) est positif au sens de l’orientation de l’espace telle qu’elle a ete choisie au paragraphe A.1.2.
z
O y
x
Fig. A.6 –
A.2 Operations sur les vecteurs libres
Toutes les operations qui mettent en jeu des vecteurs supposent qu’il s’agit de vecteurs libres,bien que ces operations soient definies d’un point de vue geometrique a partir de vecteurs liesqui representent ces vecteurs libres.
A.2.1 Operations des espaces vectoriels
Les deux operations algebriques elementaires de multiplication par un nombre reel et d’ad-dition des vecteurs conduisent a la construction des espaces vectoriels sur R (les elements de Rs’appelant alors les scalaires).
A.2.1.1 Multiplication d’un vecteur par un nombre reel
Soit ~V un vecteur libre de direction orientee(~δ
)et de module ` (> 0), et soit α un nombre
reel (algebrique) quelconque.
Definition A.10 On appelle produit du vecteur ~V par le nombre α, qu’on note α ~V , levecteur libre de direction (δ), ayant meme sens que ~V si α > 0 et le sens oppose si α < 0, etdont le module est egal au produit |α| `.
+ L’ordre α ~V ou ~V α est sans importance. On ne met pas de point entre les deux facteurs.
Exemples :• si α = 0, le module de α ~V est nul, donc : 0 ~V = ~0.• si α = −1, le vecteur α ~V a le meme module que ~V mais il est de sens oppose.
On le note −~V et on dit que c’est le vecteur oppose de ~V .
Si l’on considere le representant de ~V d’origine A, c’est-a-dire le vecteur lie (A,A′) tel que−−→AA′ = ~V , alors le vecteur α ~V a pour representant d’origine A le vecteur lie (A,A′′) ou A′′
est l’homothetique de A′ dans l’homothetie de centre A et de rapport α (voir Fig. A.7, avecα = −3/2.)

A.2. OPERATIONS SUR LES VECTEURS LIBRES 147
α ~V ~V
A′′ A A′
Fig. A.7 –
A.2.1.2 Addition des vecteurs
Considerons deux vecteurs libres ~V1 et ~V2, et les vecteurs lies (A,A′1) et (A,A′2) de memeorigine A qui les representent (Fig. A.8).
A′2
A′
~V2~V
A
~V1
A′1
Fig. A.8 –
Definition A.11 On appelle vecteur somme des vecteurs libres ~V1 et ~V2 le vecteur libre ~Vassocie au vecteur lie (A,A′) construit sur la diagonale du parallelogramme de cotes AA′1 etAA′2.
Notation :~V = ~V1 + ~V2 ou
−−→AA′ =
−−→AA′1 +
−−→AA′2
+ Le vecteur libre ainsi defini ne depend pas du point A choisi.
Relation de Chasles pour les vecteurs. Les vecteurs lies (A,A′2) et (A′1, A′) sont equipol-
lents de telle sorte que l’on peut aussi ecrire :−−→AA′ =
−−→AA′1 +
−−−→A′1A
′ (A.1)
A.2.1.3 Espace vectoriel
On peut montrer que les deux operations qui viennent d’etre definies verifient les proprietessuivantes :
1 ~V = ~V (A.2a)
(α β) ~V = α(β ~V
)(A.2b)
~V1 +(~V2 + ~V3
)=
(~V1 + ~V2
)+ ~V3 = ~V1 + ~V2 + ~V3 (notation) (A.3a)
~V +~0 = ~V (A.3b)~V +
(− ~V
)= ~0 (A.3c)
~V1 + ~V2 = ~V2 + ~V1 (A.3d)

148 ANNEXE A. VECTEURS ET REPERES DE L’ESPACE
(α + β) ~V = α ~V + β ~V (A.4a)
α(~V1 + ~V2
)= α ~V1 + α ~V2 (A.4b)
L’ensemble de ces proprietes constitue les axiomes de definition d’un espace vectoriel.
A.2.2 Produit scalaire de deux vecteurs
A.2.2.1 Definition du produit scalaire
Soient ~V1 et ~V2 deux vecteurs libres de l’espace, de modules `1 et `2 respectivement. Designonspar θ l’angle arithmetique (compris entre 0 et π) de ces deux vecteurs (cf. paragraphe A.1.1.2).
Definition A.12 On appelle produit scalaire des vecteurs ~V1 et ~V2 le nombre algebrique definicomme le produit `1 `2 cos(θ).
Notation :~V1 · ~V2 = `1 `2 cos(θ) =
∥∥ ~V1
∥∥ ∥∥ ~V2
∥∥ cos(θ) (A.5)
+ Dans cette operation, l’ordre des vecteurs est indifferent.
A.2.2.2 Proprietes du produit scalaire
~V · ~V =∥∥ ~V
∥∥2 (A.6)~V1·~V2 = 0⇒ l’un (au moins) des deux vecteurs est nul ou bien les deux vecteurs sont orthogonauxentre eux.
Relation avec les operations algebriques :
α(~V1 · ~V2
)=
(α ~V1
)· ~V2 (A.7)
~V ·(~V1 + ~V2
)= ~V · ~V1 + ~V · ~V2 (A.8)
A.2.2.3 Projection orthogonale d’un vecteur sur une direction de droite orientee
Soient ~V un vecteur libre quelconque et ~e un vecteur libre unitaire : ‖~e ‖ = 1. On introduitu et ~Vx par les relations suivantes :
u = ~V · ~e ; ~Vx = u~e =(~V · ~e
)~e
On verifie immediatement que le vecteur difference−→W = ~V − ~Vx est orthogonal au vecteur ~e.
Par ailleurs, au vecteur unitaire ~e correspond, de maniere biunivoque, une direction de droiteorientee
(~δ
).
Definition A.13 Le vecteur ~Vx s’appelle projection (vectorielle) orthogonale du vecteur ~Vsur la direction de droite orientee (~δ). Le nombre algebrique u est la projection algebrique duvecteur ~V sur (~δ).
On peut donc ecrire :~V =
(~V · ~e
)~e +−→W avec
−→W ⊥ ~e (A.9)
La figure A.9, ou tous les elements (sauf−→W ) sont decrits geometriquement par leurs repre-
sentants d’origine A (arbitraire), resume ce resultat.

A.2. OPERATIONS SUR LES VECTEURS LIBRES 149
~V−→W
A (~δ)
~e ~Vx
Fig. A.9 –
A.2.3 Produit vectoriel de deux vecteurs libres
Les notions qui vont etre introduites dans ce paragraphe font intervenir l’orientation del’espace. On aura interet a bien relire a ce sujet le paragraphe A.1.2.
A.2.3.1 Definition du produit vectoriel
Considerons deux vecteurs libres ~V1 et ~V2, pris dans cet ordre et supposes de directions(δ1) et (δ2) differentes. Ces deux directions definissent une direction de plan et par suite ladirection de droite (ω) perpendiculaire a cette direction de plan. De plus, on peut choisir sur(ω) une orientation telle que le triplet des directions de droites orientees
{(~δ1
),(~δ2
), (~ω)
}soit
positif (interviennent ici le choix de l’orientation de l’espace et l’ordre des vecteurs ~V1 et ~V2).Par ailleurs, designons par θ l’angle (compris entre 0 et π) des deux vecteurs.
Definition A.14 Le produit vectoriel des deux vecteurs libres ~V1 et ~V2 est le vecteur libre−→W
ayant pour direction orientee (~ω) et pour module le produit suivant (toujours positif) :∥∥−→W∥∥ =∥∥ ~V1
∥∥ ∥∥ ~V2
∥∥ sin(θ) (A.10)
Notation : −→W = ~V1 ∧ ~V2
En d’autres termes, le produit vectoriel−→W = ~V1∧ ~V2 est le vecteur libre perpendiculaire au plan
defini par les deux vecteurs ~V1 et ~V2, tel que le triplet(~V1, ~V2,
−→W
)soit positif (Fig. A.10), et de
module egal au produit des modules et du sinus de l’angle des vecteurs.
−→W
~V2
gauche
θ
~V1
Fig. A.10 –
+ Si l’on change la convention d’orientation de l’espace, le produit vectoriel sera represente par levecteur libre oppose a celui qui vient d’etre defini. On dit qu’un tel vecteur, dont la definitiondepend de l’orientation de l’espace, est un pseudo-vecteur ou encore vecteur « axial » (paropposition avec les vecteurs ordinaires qui sont dits « polaires »). On signifie par la qu’un tel

150 ANNEXE A. VECTEURS ET REPERES DE L’ESPACE
vecteur depend de la disposition des axes de coordonnees (voir plus loin) qui est elle-meme lieea cette orientation.
A.2.3.2 Proprietes du produit vectoriel
~V1 ∧ ~V2 = 0 ⇒∥∥ ~V1
∥∥ = 0 ou (et)∥∥ ~V2
∥∥ = 0 ou θ = 0 ou π (A.11)
Si le produit vectoriel de deux vecteurs est nul, ou bien l’un (au moins) de ces vecteurs est nul,ou bien les vecteurs ont meme direction.
~V2 ∧ ~V1 = −~V1 ∧ ~V2 (A.12)(α ~V1
)∧ ~V2 = α
(~V1 ∧ ~V2
)(A.13)
(La definition geometrique du paragraphe A.2.3.1 permet de demontrer ce resultat facilement).
~V1 ∧(~V2 + ~V3
)= ~V1 ∧ ~V2 + ~V1 ∧ ~V3 (A.14)
(on verifiera plus loin ce resultat en utilisant les composantes des vecteurs sur une base : para-graphe A.3.3).
A.2.3.3 Produit mixte de trois vecteurs libres
On verra plus loin qu’on peut montrer (en utilisant les composantes, paragraphe A.3.3.2) lapropriete suivante d’invariance par permutation circulaire :
~V1 ·(~V2 ∧ ~V3
)= ~V2 ·
(~V3 ∧ ~V1
)= ~V3 ·
(~V1 ∧ ~V2
)(A.15)
Definition A.15 Le nombre algebrique ainsi defini est appele produit mixte des trois vecteurs~V1, ~V2, ~V3 pris dans cet ordre, a une permutation circulaire pres.
Notation : (~V1, ~V2, ~V3
)+ Le produit mixte change de signe si l’on echange deux vecteurs (il suffit d’utiliser (A.12)). Il est
nul si deux vecteurs (au moins) sont de meme direction (il suffit d’utiliser (A.11)).
A.3 Bases et composantes d’un vecteur
A.3.1 Base orthonormee
Definition A.16 Un triplet de vecteurs libres non coplanaires est appele base de l’ensembledes vecteurs libres.
On notera B = (~ex, ~ey, ~ez) la base B composee des vecteurs libres (~ex, ~ey, ~ez). Si (~ex, ~ey, ~ez)forment un triplet positif de vecteurs (voir paragraphe A.1.2), alors la base est dite directe.
Si les vecteurs libres composant la base B = (~ex, ~ey, ~ez) sont orthogonaux deux a deux, alorsla base B est orthogonale. Si, de plus, chaque vecteur est de norme egale a 1, alors la base B estdite orthonormee.
Si la base B = (~ex, ~ey, ~ez) est orthonormee, alors :{‖~ex‖ = ‖~ey‖ = ‖~ez‖ = 1~ex · ~ey = ~ey · ~ez = ~ez · ~ex = 0

A.3. BASES ET COMPOSANTES D’UN VECTEUR 151
Si de plus, la base B est directe, alors :~ex ∧ ~ey = ~ez
~ey ∧ ~ez = ~ex
~ez ∧ ~ex = ~ey
Nous ne considererons dans la suite que des bases orthonormees directes.
A.3.2 Composantes d’un vecteur sur une base orthonormee
Considerons la base B = (~ex, ~ey, ~ez) orthonormee directe et les axes Ox, Oy, Oz definis parO (point quelconque de l’espace) et par ~ex, ~ey, ~ez respectivement.
Soit ~V un vecteur libre quelconque, represente par le vecteur lie (O,M) tel que : ~V =−−→OM .
On introduit les trois points I, J , K qui sont les projections orthogonales du point M surles trois axes Ox, Oy, Oz. On introduit aussi le point H qui est la projection orthogonale de Msur le plan defini par les deux axes Ox et Oy. On a vu au paragraphe A.2.2.3 que :
−→OI =
(−−→OM · ~ex
)· ~ex
−→OJ =
(−−→OM · ~ey
)· ~ey
−−→OK =
(−−→OM · ~ez
)· ~ez
z
O y
x
~V~ez
~ey~ex
HI
J
K
M
Fig. A.11 –
Par ailleurs, par definition de l’addition des vecteurs, on a :
−−→OH =
−→OI +
−→OJ et
−−→OM =
−−→OH +
−−→OK
or ~V =−−→OM , donc on peut ecrire :
~V =−→OI +
−→OJ +
−−→OK
=(−−→OM · ~ex
)︸ ︷︷ ︸u
·~ex +(−−→OM · ~ey
)︸ ︷︷ ︸v
·~ey +(−−→OM · ~ez
)︸ ︷︷ ︸w
·~ez = u~ex + v ~ey + w~ez (A.16)
Definition A.17 Les nombres (algebriques) u, v, w sont appeles composantes du vecteur(libre) ~V sur la base B = (~ex, ~ey, ~ez).

152 ANNEXE A. VECTEURS ET REPERES DE L’ESPACE
On notera frequemment ces composantes de la maniere suivante :
~V
B
∣∣∣∣∣∣uvw
ou~V
(~ex, ~ey, ~ez)
∣∣∣∣∣∣uvw
(A.17)
Remarques importantes :
1. Cette base B etant donnee, tout vecteur libre est represente de maniere unique par untriplet ordonne de nombres algebriques et inversement.
2. Un meme vecteur libre ~V peut etre projete sur une base B1 = (~ex1 , ~ey1 , ~ez1) differente deB = (~ex, ~ey, ~ez).~V pourra alors s’ecrire a la fois ~V = u~ex + v ~ey + w~ez et ~V = u1 ~ex1 + v1 ~ey1 + w1 ~ez1 .Il est alors fondamental de bien preciser la base dans laquelle on exprime le vecteur ~V ,lorsque l’on emploie la notation precedente :
~V
B
∣∣∣∣∣∣uvw
=~V
B1
∣∣∣∣∣∣u1
v1
w1
3. Pour projeter un vecteur libre ~V sur les vecteurs d’une base B = (~ex, ~ey, ~ez), on peuttoujours utiliser l’equation suivante, deduite de l’equation (A.16) :
~V =(~V · ~ex
)︸ ︷︷ ︸u
·~ex +(~V · ~ey
)︸ ︷︷ ︸v
·~ey +(~V · ~ez
)︸ ︷︷ ︸w
·~ez (A.18)
A.3.3 Expression des operations en fonction des composantes
A.3.3.1 Multiplication par un scalaire et addition
α ~V , α ∈ R si~V
B
∣∣∣∣∣∣uvw
alorsα ~V
B
∣∣∣∣∣∣α uα vα w
(A.19)
~V1 + ~V2 si~V1
B
∣∣∣∣∣∣u1
v1
w1
et~V2
B
∣∣∣∣∣∣u2
v2
w2
alors~V1 + ~V2
B
∣∣∣∣∣∣u1 + u2
v1 + v2
w1 + w2
(A.20)
+ Les deux vecteurs ~V1 et ~V2 doivent absolument etre dans la meme base B.
A.3.3.2 Produit scalaire, produit vectoriel et produit mixte
+ seulement en base orthonormee et pour des vecteurs exprimes dans la meme base :
Produit scalaire ~V1 · ~V2
~V1 · ~V2 = (u1 ~ex + v1 ~ey + w1 ~ez) · (u2 ~ex + v2 ~ey + w2 ~ez) = u1 u2 + v1 v2 + w1 w2
en utilisant la definition d’une base orthonormee (paragraphe A.3.1). Donc :
~V1 · ~V2 = u1 · u2 + v1 · v2 + w1 · w2 (A.21)
et aussi : ∥∥ ~V∥∥ =
√u2 + v2 + w2 (A.22)

A.4. REPERES DANS L’ESPACE PHYSIQUE 153
Produit vectoriel ~V1 ∧ ~V2
~V1 ∧ ~V2 = (u1 ~ex + v1 ~ey + w1 ~ez) ∧ (u2 ~ex + v2 ~ey + w2 ~ez)= (v2 w3 − w2 v3)~ex + (w2 u3 − u2 w3)~ey + (u2 v3 − v2 u3)~ez
en utilisant la definition d’une base orthonormee directe (paragraphe A.3.1). On peut aussi ecrirece resultat sous la forme :
~V1
B
∣∣∣∣∣∣u1
v1
w1
∧~V2
B
∣∣∣∣∣∣u2
v2
w2
=~V1 ∧ ~V2
B
∣∣∣∣∣∣v1 w2 − w1 v2
w1 u2 − u1 w2
u1 v2 − v1 u2
(A.23)
Remarque. Pour calculer facilement un produit vectoriel, il vaut mieux ecrire les vecteursen colonne. Une fois la premiere composante calculee, les autres s’obtiennent par permutationcirculaire :
u → v → w↑ ← �
Exercice. Utilisez la formule (A.23) pour etablir la formule (A.14).
Produit mixte(~V1, ~V2, ~V3
)~V3 ·
(~V1 ∧ ~V2
)= u3 (v1 w2 − w1 v2) + v3 (w1 u2 − u1 w2) + w3 (u1 v2 − v1 u2) (A.24)
On peut ecrire aussi :
~V3 ·(~V1 ∧ ~V2
)= u1 v2 w3 + w1 u2 v3 + v1 w2 u3 − u1 v3 w2 − v1 w3 u2 − w1 u3 v2
Avec cette derniere expression, il est simple d’etablir la relation (A.15).Pour calculer facilement un produit mixte, on remarque dans (A.24), qu’une fois le premier
terme calcule, les autres s’obtiennent par permutation circulaire.
A.4 Reperes dans l’espace physique
Dans toute la suite, nous ne considererons que les reperes orthonormes.
Definition A.18 Un repere R orthonorme de l’espace est defini par la donnee – d’un pointde l’espace appele origine, soit O, – de trois vecteurs libres unitaires, orthogonaux deux a deux,soit B = (~ex, ~ey, ~ez), la base orthormee associee au repere R.
On introduit aussi les trois directions orientees Ox, Oy, Oz perpendiculaires deux a deuxdefinies par O et par les trois vecteurs unitaires ~ex, ~ey, ~ez respectivement.
Terminologie et notations. On parle alors du repere (O, xyz) ou bien du repere d’origineO et de base B = (~ex, ~ey, ~ez), note selon les cas :
R, (O, xyz), (O;xyz), (O;~ex, ~ey, ~ez) ou (O,B)
On voit que l’ordre des directions Ox, Oy, Oz ou des vecteurs ~ex, ~ey, ~ez est fondamental. Sila base B est directe, alors le repere ainsi defini est positif ou direct. Un repere etant donne, toutpoint M de l’espace est alors represente de maniere unique par un triplet ordonne de nombresalgebriques et inversement, comme dans le paragraphe A.3.2.

154 ANNEXE A. VECTEURS ET REPERES DE L’ESPACE
z
O y
xH
M
Fig. A.12 –
A.4.1 Repere cartesien. Coordonnees cartesiennes
Soit R = (O;~ex, ~ey, ~ez) un repere orthonorme positif donne.A tout point M de l’espace, on associe le vecteur libre
−−→OM (Fig. A.12).
Les composantes de−−→OM sur la base (O;~ex, ~ey, ~ez) sont appelees « coordonnees cartesien-
nes du point M dans le repere R ». Nous les noterons x, y, z.Cela revient a dire que
−−→OM = x~ex + y ~ey + z ~ez (A.25)
A.4.2 Coordonnees cartesiennes et coordonnees polaires dans le plan
On considere un plan Π oriente conformement au sens de sa normale, correspondant a l’axeOz, et le repere R = (O;~ex, ~ey, ~ez). Dans le plan Π, le repere (O;~ex, ~ey) est donc un repere positifdu plan.
A.4.2.1 Coordonnees cartesiennes dans le plan
A tout point H du plan Π, on associe le vecteur libre−−→OH (Fig. A.13).
Les composantes de−−→OH sur la base (~ex, ~ey) sont appelees « coordonnees cartesiennes du
point H dans le repere (O;~ex, ~ey) ». Nous les noterons x, y.
O x
y
H
+
Fig. A.13 –
Cela revient a dire que−−→OH = x~ex + y ~ey (A.26)

A.4. REPERES DANS L’ESPACE PHYSIQUE 155
A.4.2.2 Coordonnees polaires dans le plan
H etant un point quelconque de (O;~ex, ~ey), on considere la droite (OH) sur laquelle onchoisit une orientation qui n’est pas necessairement celle du vecteur
−−→OH. On definit ainsi un axe
Ox1 (Fig. A.14). On designe par :ρ : la mesure algebrique
−−→OH sur l’axe Ox1 ;
ϕ : l’angle algebrique (Ox, Ox1), defini modulo 2π.ρ et ϕ constituent un couple de « coordonnees polaires » associe au point H.
Ox
y
z
H
x1
ϕρ = OH
Fig. A.14 –
Sur la figure A.14, le petit cercle avec un point dans son interieur signifie que l’axe Oz estdirige vers l’avant du plan de la figure.
Remarques. A un point H correspond une infinite de couples de coordonnees polaires :– il y a deja l’infinite ρ, ϕ + 2 k π (k ∈ Z)– si l’on change le choix de l’orientation de la droite (OH), l’axe Ox1 est change en son
oppose, donc ρ en −ρ et ϕ en ϕ + π (modulo 2 π).– on a donc la double infinite de points :{
ρ, ϕ + 2 k π−ρ, ϕ + π + 2 k π
(k ∈ Z) (A.27)
A.4.3 Coordonnees cylindriques
z
O y
x
K
H
M
x1
ρϕ
Fig. A.15 –
Le repere R = (O;~ex, ~ey, ~ez) etant donne, on peut reperer un point M quelconque de l’espacede la maniere suivante : on considere les projections H sur le plan (O;~ex, ~ey) et K sur l’axe Oz.

156 ANNEXE A. VECTEURS ET REPERES DE L’ESPACE
La position de H est reperee dans le plan par ses coordonnees polaires H(ρ, ϕ) et celles de K
sur Oz par la mesure algebrique de−−→OK sur l’axe Oz, notee z.
Le point M est repere par le triplet (ρ, ϕ, z) appele « coordonnees cylindriques » de Mdans R = (O;~ex, ~ey, ~ez), avec l’indetermination sur ρ et ϕ deja signalee.
Remarque. Les mesures algebriques ρ et z de−−→OH et
−−→OK sur les axes Ox1 et Oz sont aussi
notees OH et OK (ρ = OH et z = OK).
Relations avec les coordonnees cartesiennes
• Marche a suivre
1. On introduit d’abord le vecteur unitaire ~eρ qui correspond a l’axe Ox1.
2. Sachant d’apres l’equation (A.25) que−−→OM = x~ex + y ~ey + z ~ez et aussi que :
−−→OM = ρ~eρ + z ~ez (A.28)
on peut deduire les relations entre (x, y, z) et (ρ, ϕ, z)
• Obtention des relations cherchees
~eϕ ~ey
~eρ
~ex
~ez
ϕ
ϕ
Fig. A.16 –
Dans le plan oriente defini par le repere orthonorme direct (O;~ex, ~ey), on introduit levecteur ~eρ et le vecteur ~eϕ unitaire et tel que l’angle oriente (~eρ, ~eϕ) soit +π/2. Il est clairque :
~eρ = cos(ϕ)~ex + sin(ϕ)~ey
~eϕ = − sin(ϕ)~ex + cos(ϕ)~ey(A.29)
On a donc :
−−→OM = ρ~eρ + z ~ez = ρ [ cos(ϕ)~ex + sin(ϕ)~ey ] + z ~ez = x~ex + y ~ey + z ~ez
d’ou x = ρ cos(ϕ)y = ρ sin(ϕ)z = z
(A.30)

A.5. EN RESUME 157
A.5 En resume
¢ Un resume est forcement « reducteur ». Ce paragraphe a seulement pour vocation d’attirer l’at-tention du lecteur sur les points capitaux du chapitre et ne peut constituer a lui tout seul « la »reference.
• Vecteurs libres, orientation de l’espace– Difference entre vecteur libre, vecteur lie et vecteur glissant : on n’effectue d’operations
que sur des vecteurs libres tandis qu’on ne peut dessiner que des vecteurs lies.– Orienter l’espace, c’est choisir pour triplets positifs (ou directs), entre les triplets « a
gauche » et les triplets « a droite ».– Orienter un plan (dans l’espace oriente), c’est se donner un vecteur unitaire normal au
plan.
• Operations sur les vecteurs libres– Produit scalaire :
~V1 · ~V2 =∥∥ ~V1
∥∥ ∥∥ ~V2
∥∥ cos(θ) avec 0 ≤ θ ≤ π
– Produit vectoriel :∥∥ ~V1 ∧ ~V2
∥∥ =∥∥ ~V1
∥∥ ∥∥ ~V2
∥∥ sin(θ) avec 0 ≤ θ ≤ π
~V1 ∧ ~V2 est un vecteur perpendiculaire a ~V1 et a ~V2. Son sens est tel que le triplet(~V1, ~V2, ~V1 ∧ ~V2
)soit positif (regle du bonhomme d’Ampere).
• Bases et composantes d’un vecteur– Definition d’une base orthonormee directe– Composantes d’un vecteur sur une base : un meme vecteur a des composantes differentes
suivant la base sur laquelle il est projete⇒ toujours signaler dans quelle base on a projetele vecteur.
~V =(~V · ~ex
)︸ ︷︷ ︸u
·~ex +(~V · ~ey
)︸ ︷︷ ︸v
·~ey +(~V · ~ez
)︸ ︷︷ ︸w
·~ez
– Operations en fonction des composantes.
• Reperes dans l’espace physiqueUn repere est defini par une origine est une base : R = (O,B)
Coordonnees cartesiennes : x, y, z ;−−→OM = x~ex + y ~ey + z ~ez
Coordonnees cylindriques : (ρ, ϕ, z) ;−−→OM = ρ~eρ + z ~ez

158 ANNEXE A. VECTEURS ET REPERES DE L’ESPACE

Bibliographie
[1] Agati P. et Mattera N., Mecanique 1 : Modelisation, Cinematique, Statique, Dunod, 1994.
[2] Gatignol Ph. et Potel C., Mecanique, Polycopie, Universite Technologique de Compiegne,1997.
[3] Potel C. et M. Bruneau M., Acoustique generale, Ellipse, Paris, 2006.
[4] Le courrier du CNRS, La Mecanique en 1988 ?, n◦ 71, 1988.
159