Embed Size (px)
DESCRIPTION
jjj
Citation preview

Université de Boumerdès-Faculté des sciences-Département de physique Recueil d’examens de Mécanique rationnelle de 1999 à 2009 :A.KADI ; A.HADI
1
Année 2005-2006
RATTRAPAGE : Mécanique Rationnelle
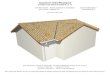
Durée : 1h 30 mn Exercice 01 : (12 points) On considère un solide (S) constitué : - d’un disque (1) homogène, de centre de gravité G, de rayon a, de masse M et d’épaisseur négligeable devant les autres dimensions. - d’une tige (2) de longueur a, de masse négligeable, soudée en G au disque (1). Le solide (S) roule sans glisser au point I sur le sol horizontal (0) de telle manière que l’extrémité de la tige (2) coïncide en permanence avec un point O fixe du sol (0).
Le référentiel fixe ),,,( 0000
→→→
zyxOR est associé au sol (0).
),,,( 1111
→→→
zyxOR est en rotation dans le sens positif par rapport à 0R tel que ),(),( 1010
→→→→
== xxzzθ et →→
= 10 yy ; →−
1Ox est toujours colinéaire à l’axe →−
OI
Le référentiel ),,,( 2222
→→→
zyxOR se déduit à chaque instant de ),,,( 1111
→→→
zyxOR par une rotation
d’angle α = 45°autour de l’axe →−
1Oz
Le référentiel ),,,( 3333
→→→
zyxGR , rigidement lié au solide (S), se déduit à chaque instant de
),,,( 2222
→→→
zyxOR par une rotation d’angle ϕ autour de l’axe →−
2Ox .
On notera : →→
−= 0ygg l’accélération de la pesanteur ;
→→→→
++= 1010100 zRyRxRR zyx l’action de contact du sol (0) sur le solide (S) au point O ;
→→→→
++= 111 zRyRxRR IzIyIxI l’action de contact du sol (0) sur le solide (S) au point I.
→→
01, yy
→
Ω01
→
Ω23
α
→
2y
→→
32 , xx
→
1x

Université de Boumerdès-Faculté des sciences-Département de physique Recueil d’examens de Mécanique rationnelle de 1999 à 2009 :A.KADI ; A.HADI
2
Etude cinématique :
1.1 Déterminer le vecteur rotation →
Ω03 du solide (S) dans R1 et R2 ainsi que la vitesse absolue
du point G dans R1 et R2 ; 1.2 Donner le torseur cinématique du solide (S) au point G ; 1.3 Ecrire la condition de roulement sans glissement au point I. En déduire une relation simple
liant •
θ et •
ϕ ; 1.4 Déterminer l’axe instantané de rotation du solide (S) par rapport au sol (0) ; 1.5 Déterminer l’accélération absolue du point G dans R1; Etude cinétique : 2.1 Déterminer le tenseur d’inertie [ GI ] du solide (S) dans 2R ;
2.2 Déterminer le moment d’inertie 1GxI du solide (S) par rapport à l’axe
→−
1Gx ;
2.3 En déduire le moment d’inertie 1OxI du solide (S) par rapport à l’axe
→−
1Ox ; 2.4 Exprimer l’énergie cinétique )/( 0RSEc du solide (S) dans son mouvement par rapport à 0R ; Etude dynamique : 3.1 Appliquer le théorème de la résultante dynamique au solide (S) et en déduire les équations scalaires dans R1;
3.2 Exprimer dans 2R le moment cinétique )/( 00 RS→
σ du solide (S) au point O ;
3.3 Calculer le moment dynamiquedt
RSd )/( 00
→
σ dans R2 puis l’exprimer dans 1R ;
3.4 Déterminer le moment )(0
→−−−−−
PM au point O dans R1;
3.5 Déterminer le moment )(0
→−−−−−
IRM au point O dans R1; 3.6 Appliquer le théorème du moment dynamique au solide (S) au point O dans R1;

Université de Boumerdès-Faculté des sciences-Département de physique Recueil d’examens de Mécanique rationnelle de 1999 à 2009 :A.KADI ; A.HADI
3
Exercice 02 : ( 8 points) Soit le système constitué de deux plaques S1 et S2 , rectangulaires, de dimensions (a x b)
identiques, minces, et homogènes de poids chacune →→
−= zPP . Elles sont liées entre elles par deux articulations cylindriques en A et B. Les plaques, (S1 horizontale, S2 verticale), sont maintenues dans une position d’équilibre statique comme indiqué sur la figure ci-dessous. Les liaisons aux différents points sont :
- articulation sphérique en O ; - articulation cylindrique en C ; - câble en D.
On désigne par G1 et G2 les centres de gravité respectifs des deux plaques. Le système est en équilibre statique :
1- Donner les composantes des forces de liaison et des forces appliquées (poids) ; 2- Ecrire les coordonnées des points d’application des forces ; 3- Calculer les réactions aux points O et C ainsi que la tension du câble ; 4- Calculer les réactions qui s’exercent sur la plaque S2 aux points A et B.
DO
→
x
→
y
→
z
a
a
b
b
4/a
°45
4/a
1G
2G
2/a

Université de Boumerdès-Faculté des sciences-Département de physique Recueil d’examens de Mécanique rationnelle de 1999 à 2009 :A.KADI ; A.HADI
4
Solution :
1.1 Vecteur rotation instantanée →
Ω03 :
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
−
−
=Ω••
•
→
022
22
1
03 ϕθ
ϕ
R
,
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧−
=Ω•
••
→
022
22
2
03 θ
ϕθ
R
Vitesse absolue du point G :
⎪⎩
⎪⎨
⎧
°−=
⎪⎩
⎪⎨
⎧°°
∧=⎪⎩
⎪⎨
⎧=∧Ω+=
•
•→−→→→
45cos00
045sin45cos
0
0)()(
111
01
00
θθ
aR
aa
RR
OGOVGV
⎪⎩
⎪⎨
⎧
°−=
⎪⎩
⎪⎨
⎧∧
⎪⎪⎩
⎪⎪⎨
⎧
°
°
=∧Ω+=•
•
•
→−→→→
45cos00
00
045sin45cos
)()(
222
01
00
θθθ
aR
a
RR
OGOVGV car →→
≡ 21 zz
1.2 Torseur cinématique du solide (S) au point G : [ ]⎪⎩
⎪⎨⎧Ω= →
→
)(
0
03
GVT G
1.3 Condition de roulement sans glissement : →→→
=∈=∈ 0)()0( 100 SIVIV
I et G appartiennent au même solide alors : →→→→→
=∧Ω+= 0)()( 03
00 GIGVIV
⎪⎩
⎪⎨
⎧
°−=
⎪⎩
⎪⎨
⎧°°
∧⎪⎩
⎪⎨
⎧=∧Ω+=
•
•→−→→→
45cos00
045sin45cos
0
0)()(
111
01
00
θθ
aR
aa
RR
OGOVGV
→
••
••
•
•
→
=⎪⎩
⎪⎨
⎧
−=
⎪⎩
⎪⎨
⎧°−°
∧
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
−
−
+⎪⎩
⎪⎨
⎧
°−= 0
)2(00
045sin
45cos
022
22
45cos00
)(
11
1
1 θϕϕθ
ϕ
θ aR
aa
R
R
aR
IV
••
= θϕ 2 ou ••
= ϕθ22
1.4 Axe instantané de rotation du solide (S) par rapport au sol (0) ;
L’axe instantané de rotation est l’axe →−
OI car O et I appartiennent au solide et leurs vitesses sont nulles. On peut le déterminer aussi analytiquement ou géométriquement.

Université de Boumerdès-Faculté des sciences-Département de physique Recueil d’examens de Mécanique rationnelle de 1999 à 2009 :A.KADI ; A.HADI
5
1.5 Accélération absolue du point G dans R1 ;
⎪⎪
⎩
⎪⎪
⎨
⎧
−
−
=∧Ω+==••
•
→−→→−→−
→
θ
θ
γ
22
022
)()()()(
2
1
001
01000
a
a
R
GVdt
GVddt
GVdG
Etude cinétique : 2.1 Tenseur d’inertie [ GI ] du solide (S) dans 2R ;
2
2
2
2
4/0004/0002/
Rmama
maIG
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
=
2.2 Moment d’inertie 1GxI du solide (S) par rapport à l’axe
→−
1Gx ; →→→
−= 221 22
22 yxx
2
2
2
2
2
11 43
02
2
4/0004/0002/
)0,22,
22(..
11ma
Rmama
maxIxI Gx
TGx =
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
−⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−==→→
2.3 Moment d’inertie 1OxI du solide (S) par rapport à l’axe
→−
1Ox ;
La distance qui sépare les axes →−
1Ox et →−
1Gx est égale à : 2245cos aad =°=
85
243 22
2211
mamamamdII GxOx =+=+=
2.4 Energie cinétique )/( 0RSEc du solide (S) dans son mouvement par rapport à 0R ;
→→→
ΩΩ+⎟⎟⎠
⎞⎜⎜⎝
⎛= 0
303
20
0 ..21)(
21)/( G
Tc IGVmRSE
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
−
−
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−+=••
•
••••
022
22
.4/00
04/0002/
).0,22,
22(
21
41)/(
1
2
2
2
2
220 ϕθ
ϕ
ϕθϕθ
R
Rmama
mamaRSEc
••••
−+= ϕθϕθ 281
163
83)/( 22222
0 mamamaRSEc

Université de Boumerdès-Faculté des sciences-Département de physique Recueil d’examens de Mécanique rationnelle de 1999 à 2009 :A.KADI ; A.HADI
6
Etude dynamique : 3.1 Théorème de la résultante dynamique dans R1 et les équations scalaires ;
∑→→
=i
ext RGmF1
0/)(γ ⇔
1
00 /)( RGmmPRR I
→→→→
=++ γ ⇒
⎪⎪
⎩
⎪⎪
⎨
⎧
−=+
=−+
−=+
••
•
22
0
22
0
0
20
1
θ
θ
maRR
PRR
maRR
R Izz
Iyy
Ixx
3.2- Moment cinétique )/( 00 RS→
σ du solide (S) au point O dans 2R
)(.)()/()/( 003
0000 GVmOGIGVmOGRSRS GG
→→−→→→−→→
∧+Ω=∧+= σσ
⎪⎪⎩
⎪⎪⎨
⎧
−
∧⎪⎩
⎪⎨
⎧+
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧−
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
=•
•
••
→
22
00
00
022
22
.4/00
04/0002/
)/(
22
2
2
2
2
2
00
θ
θ
ϕθ
σ
aR
a
R
m
R
Rmama
maRS
⎟⎟⎠
⎞⎜⎜⎝
⎛−⎟⎟
⎠
⎞⎜⎜⎝
⎛−=
→•→••→
22
2
00 423
22
2)/( yxmaRS θϕθσ
3.3- Moment dynamiquedt
RSd )/( 00
→
σ dans 2R et son expression dans 1R
→••→••••
→→
⎟⎟⎠
⎞⎜⎜⎝
⎛−⎟⎟
⎠
⎞⎜⎜⎝
⎛−== 22
200
00 423
22
2)/(
)/( yxmadt
RSdRS θϕθ
σδ dans R2
→→→
+= 112 22
22 yxx ;
→→→
+−= 112 22
22 yxy
→••••→••••
→→
⎟⎟⎠
⎞⎜⎜⎝
⎛−−+⎟⎟
⎠
⎞⎜⎜⎝
⎛−== 11
20000 4
24
2582)/(
)/( yxmadt
RSdRS ϕθϕθ
σδ dans R1

Université de Boumerdès-Faculté des sciences-Département de physique Recueil d’examens de Mécanique rationnelle de 1999 à 2009 :A.KADI ; A.HADI
7
3.4- Moment )(0
→−−−−−
PM au point O ;
⎪⎪⎩
⎪⎪⎨
⎧
−
=⎪⎩
⎪⎨
⎧−∧
⎪⎩
⎪⎨
⎧°°
=∧=→→−→−−−−−
22
00
0
0
045sin45cos
OG )(
111
0
mgaR
mg
R
aa
R
PPM
3.5- Déterminer le moment )(0
→−−−−−
IRM au point O ;
⎪⎩
⎪⎨
⎧
−=⎪⎩
⎪⎨
⎧∧
⎪⎩
⎪⎨
⎧
=∧=→→−→−−−−−
Iy
Iz
Iz
Iy
Ix
II
RaRa
RRRR
R
a
R
RRM22
0
00
2OI )(
111
0
3.6- Théorème du moment dynamique au solide (S) au point O ;
)/( )( )( 0000 RSRMPM I
→→−−−−−→−−−−−
=+ δ
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
⎟⎟⎠
⎞⎜⎜⎝
⎛−
⎟⎟⎠
⎞⎜⎜⎝
⎛−−
=⎪⎩
⎪⎨
⎧
−+
⎪⎪⎩
⎪⎪⎨
⎧
−
••••
••••
04
2742
423
42
22
0
22
00
2
2
11
ϕθ
θϕ
ma
ma
RaRa
RmgaR
Iy
Iz
Exercice 02 : 1- Composantes des forces de liaison et des forces appliquées (poids) ;
⎪⎩
⎪⎨
⎧=
→
z
y
x
RRR
R
0
0
0
0 ; ⎪⎩
⎪⎨
⎧=
→
Cz
CyC
RRR0
; ⎪⎩
⎪⎨
⎧=
→
Az
AyA
RRSSR0
)/( 21 ;
⎪⎩
⎪⎨
⎧=
→
Bz
ByB
RRSSR0
)/( 21 ; ⎪⎩
⎪⎨
⎧−=
→
2222
0
D
DD
TTT ;
⎪⎩
⎪⎨
⎧
−=
→
PP 0
0
1 ; ⎪⎩
⎪⎨
⎧
−=
→
PP 0
0
2

Université de Boumerdès-Faculté des sciences-Département de physique Recueil d’examens de Mécanique rationnelle de 1999 à 2009 :A.KADI ; A.HADI
8
2- Coordonnées des points d’application des forces ;
)2
,,2
(G ),0,2
,2
(G ),0,2b D(0, , C(a,0,0) , )0,,
43aB( , 0) b, ,
4aA( , )0,0,0( 21
bbababO −
3- Réactions aux points O et C ainsi que la tension du câble ; Système : (S1 + S2)
→→→→→→
=++++ 0210 PPTRR C (I)
→→→−→→−→→−→→−
=∧+∧+∧+∧ 02211 POGPOGTODROC C (II)
(I) ⇒ ⎪⎩
⎪⎨
⎧
=−++=−+
=
(3) 0222 (2) 022
(1) 0
0
0
0
PTRRTRR
R
Dczz
Dcyy
x
(II) ⇒ ⎪⎩
⎪⎨
⎧=
⎪⎩
⎪⎨
⎧
−∧
⎪⎩
⎪⎨
⎧
−⎪⎩
⎪⎨
⎧+
−∧
⎪⎩
⎪⎨
⎧+
⎪⎩
⎪⎨
⎧−∧
⎪⎩
⎪⎨
⎧+
⎪⎩
⎪⎨
⎧∧
⎪⎩
⎪⎨
⎧
000
00
2/
2/00
02/2/
2222
0
02/
00
00
Pbb
a
Pba
TTb
RR
a
D
D
Cz
Cy
⇒
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
=
=++−
=−−
(6) 0
(5) 022
(4) 024
2
Cy
Cz
D
aR
PaPaaR
bPPbbT
(6) 0 =⇒ CyR (3) PR z 5 0 −=⇒ (5) PRCz =⇒ (2) PR y 3 0 =⇒
(4) PD 26T =⇒ (1) 0 0 =⇒ xR
4- Réactions qui s’exercent sur la plaque S2 aux points A et B. Système : S2
(III) : →→→→
=++ 02PRR BA ⎪⎩
⎪⎨
⎧
=−+=+
=⇒
(9) 0(8) 0
(7) 00
PRRRR
BzAz
ByAy

Université de Boumerdès-Faculté des sciences-Département de physique Recueil d’examens de Mécanique rationnelle de 1999 à 2009 :A.KADI ; A.HADI
9
(IV) : →→→−→→−
=∧+∧ 022 PAGRAB B ⎪⎩
⎪⎨
⎧=
⎪⎩
⎪⎨
⎧
−∧
⎪⎩
⎪⎨
⎧
−+
⎪⎩
⎪⎨
⎧∧
⎪⎩
⎪⎨
⎧⇒
000
00
2/0
4/0
00
2/
Pb
a
RR
a
Bz
By
(IV) ⇒
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
=
=+−
=
(12) 02
(11) 042
(10) 00
By
Bz
Ra
aPRa
(12) 0 =⇒ ByR ; (11) 2
PRBz =⇒
(9) 2
PRAz =⇒
(8) 0 =⇒ AyR