Embed Size (px)
Citation preview

Rayonnement acoustique des structures
Tony [email protected]
Universite Pierre et Marie Curie - Paris 6Institut Jean Le Rond d’Alembert - UMR CNRS 7190
4, place Jussieu - 75252 Paris cedex 05 France


Table des matieres
1 Introduction 51.1 Structure 1D et rayonnement acoustique . . . . . . . . . . . . . . . . . . . . . . . . . . 51.2 Parametres de caracterisation du rayonnement acoustique d’une structure . . . . . . . 6
2 Rayonnement acoustique des plaques minces infinies 92.1 Vibrations de flexion de plaque mince dans le vide . . . . . . . . . . . . . . . . . . . . 92.2 Rayonnement acoustique d’une plaque mince infinie couplee a deux fluides . . . . . . . 10
2.2.1 Formes des solutions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112.2.2 Conditions aux frontieres . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.3 Rayonnement acoustique dans le cas de deux fluides legers identiques . . . . . . . . . . 132.3.1 Rayonnement d’ondes evanescentes . . . . . . . . . . . . . . . . . . . . . . . . . 142.3.2 Rayonnement d’ondes propagatives . . . . . . . . . . . . . . . . . . . . . . . . . 15
3 Rayonnement acoustique des plaques minces de dimensions finies 173.1 Vibrations de plaques minces dans le vide . . . . . . . . . . . . . . . . . . . . . . . . . 17
3.1.1 Formulation generale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 173.1.2 Cas d’une plaque simplement appuyee . . . . . . . . . . . . . . . . . . . . . . . 18
3.2 Rayonnement acoustique des plaques minces . . . . . . . . . . . . . . . . . . . . . . . . 20
4 Transparence acoustique de plaques minces 234.1 Transparence acoustique d’une plaque mince infinie . . . . . . . . . . . . . . . . . . . . 23
4.1.1 Determination des amplitudes des ondes . . . . . . . . . . . . . . . . . . . . . . 234.1.2 Indice d’affaiblissement dans le cas des ondes planes . . . . . . . . . . . . . . . 244.1.3 Indice d’affaiblissement dans le cas du champ diffus . . . . . . . . . . . . . . . 26
4.2 Transparence acoustique des plaques minces de dimensions finies . . . . . . . . . . . . 284.2.1 Formulation generale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 284.2.2 Cas d’une excitation par une onde plane . . . . . . . . . . . . . . . . . . . . . . 29
5 Conclusion 31
3
Chapitre 1
Introduction
Le but de cette introduction est d’une part de presenter les objectifs du cours, et d’autre partde mettre en lumiere les difficultes relatives au rayonnement acoustique des structures. Au traversd’un exemple simple, quelques notions essentielles au rayonnement acoustique des structures vontpouvoir etre introduites. L’exemple concerne l’etude de la vibration d’une structure a un degre deliberte de type masse–ressort–amortisseur couplee a un fluide, permettant d’etudier le couplage entrela dynamique vibratoire d’une structure et le rayonnement acoustique.
1.1 Structure 1D et rayonnement acoustique
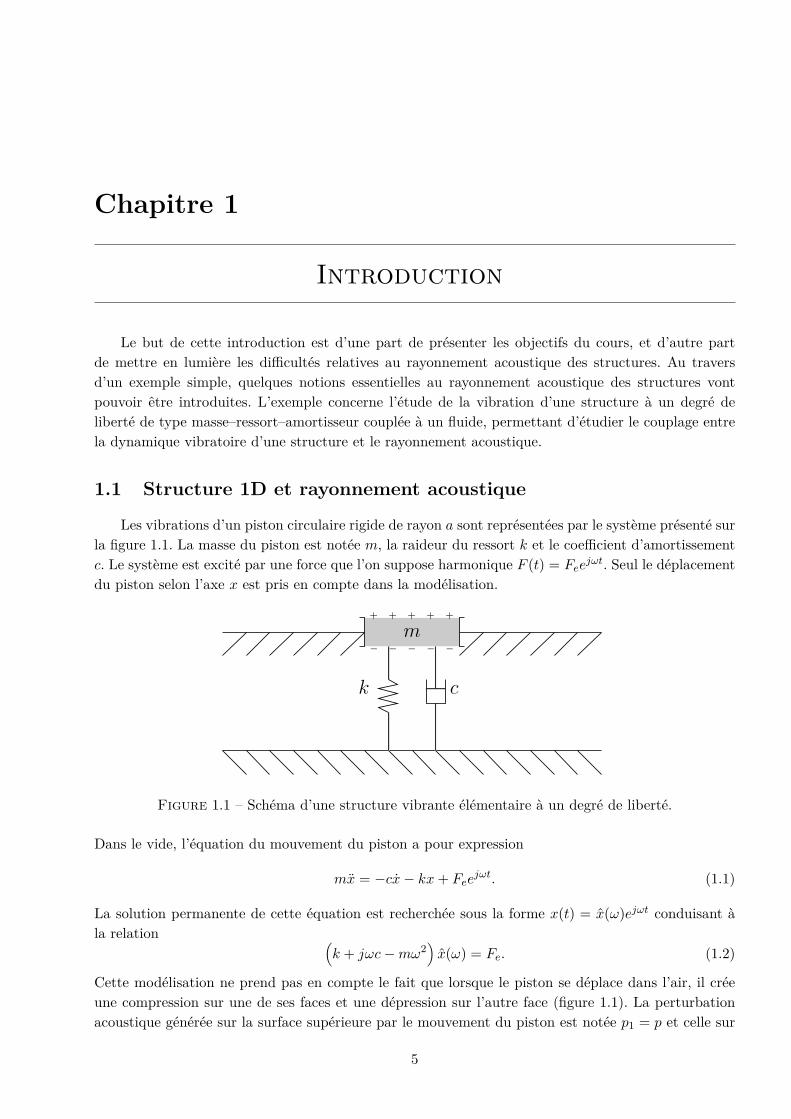
Les vibrations d’un piston circulaire rigide de rayon a sont representees par le systeme presente surla figure 1.1. La masse du piston est notee m, la raideur du ressort k et le coefficient d’amortissementc. Le systeme est excite par une force que l’on suppose harmonique F (t) = Fee
jωt. Seul le deplacementdu piston selon l’axe x est pris en compte dans la modelisation.
−−− − −
ck
m+ + + ++
Figure 1.1 – Schema d’une structure vibrante elementaire a un degre de liberte.
Dans le vide, l’equation du mouvement du piston a pour expression
mx = −cx− kx+ Feejωt. (1.1)
La solution permanente de cette equation est recherchee sous la forme x(t) = x(ω)ejωt conduisant ala relation (
k + jωc−mω2)x(ω) = Fe. (1.2)
Cette modelisation ne prend pas en compte le fait que lorsque le piston se deplace dans l’air, il creeune compression sur une de ses faces et une depression sur l’autre face (figure 1.1). La perturbationacoustique generee sur la surface superieure par le mouvement du piston est notee p1 = p et celle sur
5

6 1 Introduction
la face inferieure est donc notee p2 = −p. Les forces qu’exerce cette perturbation acoustique sur lesfaces du piston ont donc pour expressions respectives :F 1 = p1πa
2(−ex) = −pπa2ex = F1ex,
F 2 = p2πa2(+ex) = −pπa2ex = F2ex.
(1.3)
Le report de ces expressions dans l’equation (1.1) conduit a la nouvelle equation de propagation :
mx = −cx− kx+ Feejωt + F1 + F2. (1.4)
La solution de cette equation est recherchee sous la forme harmonique x(t) = x(ω)ejωt, ainsi que lapression acoustique p(t) = p(ω)ejωt. L’equation (1.4) peut alors etre mise sous la forme(
k + jωc−mω2)x(ω) = Fe − 2pπa2. (1.5)
L’impedance de rayonnement, definie comme le rapport entre la pression sur la surface vibrante(egalement appelee pression parietale) et la vitesse vibratoire normale de la surface vibrante, a pourexpression :
ZR = p(ω)jωx(ω) . (1.6)
Bien souvent l’impedance de rayonnement peut etre mise sous la forme
ZR = Z ′R + jωZ ′′R. (1.7)
En reportant cette derniere expression dans l’equation (1.5), il vient :(k + jωc−mω2
)x(ω) = Fe + 2jωx(ω)ZRπa2, (1.8)
ou encore [k + jω(c− 2πa2Z ′R)− (m− 2πa2Z ′′R)ω2
]x(ω) = Fe. (1.9)
Ce resultat montre que la partie imaginaire de l’impedance de rayonnement agit comme un termede masse ajoutee et sa partie reelle traduit un terme d’amortissement. La prise en compte durayonnement acoustique modifie donc les caracteristiques de l’oscillateur et par consequent ellemodifie les caracteristiques vibratoires de la structure. Ce couplage fluide–structure peut donc s’avererimportant a prendre en compte.
1.2 Parametres de caracterisation du rayonnement acoustique d’unestructure
Le rayonnement acoustique d’une structure vibrante peut etre caracterisee par plusieurs quantites.
? L’impedance de rayonnement ZR est une caracteristique locale du rayonnement d’un objetvibrant anime d’une vitesse vibratoire normale V (r, t). Elle est donnee par le rapport entre lapression acoustique p(r, t) a la surface de l’objet sur la vitesse vibratoire V (r, t) :
ZR = p(r, t)V (r, t) . (1.10)
1.2 Parametres de caracterisation du rayonnement acoustique d’une structure 7
? Le facteur de rayonnement σ est une caracteristique globale qui traduit la qualite durayonnement acoustique d’un objet vibrant. Son expression est la suivante :
σ(ω) = P(ω)ρ0c0S < V 2(r, ω) >
, (1.11)
ou P est la puissance acoustique mesuree sur la surface S et ou√< V 2(ω) > est la vitesse
vibratoire normale a S et moyennee sur S :
< V 2(r, ω) >= 1S
∫∫SV 2(r, ω) dS. (1.12)
? Le facteur de perte par rayonnement ηR est une caracteristique globale qui traduit laperte d’energie mecanique d’un objet vibrant par rayonnement acoustique. Son expression estla suivante :
ηR = P(ω)ωMS1 < V 2(ω) >
, (1.13)
ou M est la masse surfacique.


Chapitre 2
Rayonnement acoustique des plaques mincesinfinies
Dans ce chapitre et le suivant, on s’interesse au rayonnement acoustique de plaques minceselastiques separant deux fluides. L’etude est restreinte au cas de plaques homogenes, isotropes etde dimensions infinies.
2.1 Vibrations de flexion de plaque mince dans le vide
La plaque mince se deforme en flexion pure. Le comportement dynamique des plaque minces estdecrit a partir des hypotheses de Kirchhoff-Love :
? l’influence du cisaillement transversal (deformation des sections) est negligee,? l’influence de l’inertie de rotation est negligee.
La plaque mince est homogene, isotrope et infinie et est caracterisee par la masse volumique ρ, lemodule d’Young E, le coefficient de Poisson ν et l’epaisseur h. Dans ce cas, les vibrations de flexionsont regies par l’equation de propagation
ρh∂2w(x, y, t)
∂t2+D∇4w(x, y) = fz(x, y, t), (2.1)
ou l’operateur ∇4 = ∆2 est le double Laplacien, ou fz est une force par unite de surface orientee selonla normale a la plaque (direction z ici) et ou la rigidite de flexion D a pour expression
D = Eh3
12(1− ν2) . (2.2)
En considerant un champ de deplacement harmonique w(x, y, t) = w(x, y)ejωt, l’equation depropagation peut alors etre mise sous la forme
D∇4w(x, y)− ω2ρhw(x, y) = fz(x, y), (2.3)
avec fz(x, y, t) = fz(x, y)ejωt. En dehors des sources, cette equation se met plus generalement sous laforme
∇4w(x, y)− k4pw(x, y) = 0, (2.4)
aveck4p = ω2ρh
D. (2.5)
Le deplacement w(x, y) peut etre determine en faisant usage de la methode de separation des variables :
w(x, y) =(Axe
jkxx +Bxe−jkxx
) (Aye
jkyy +Bye−jkyy
), (2.6)
9
10 2 Rayonnement acoustique des plaques minces infinies
aveck2p = k2
x + k2y. (2.7)
La vitesse de phase des ondes de flexion est alors definie par la relation
c = ω
kp=√ω
(Eh2
12ρ(1− ν2)
) 14
. (2.8)
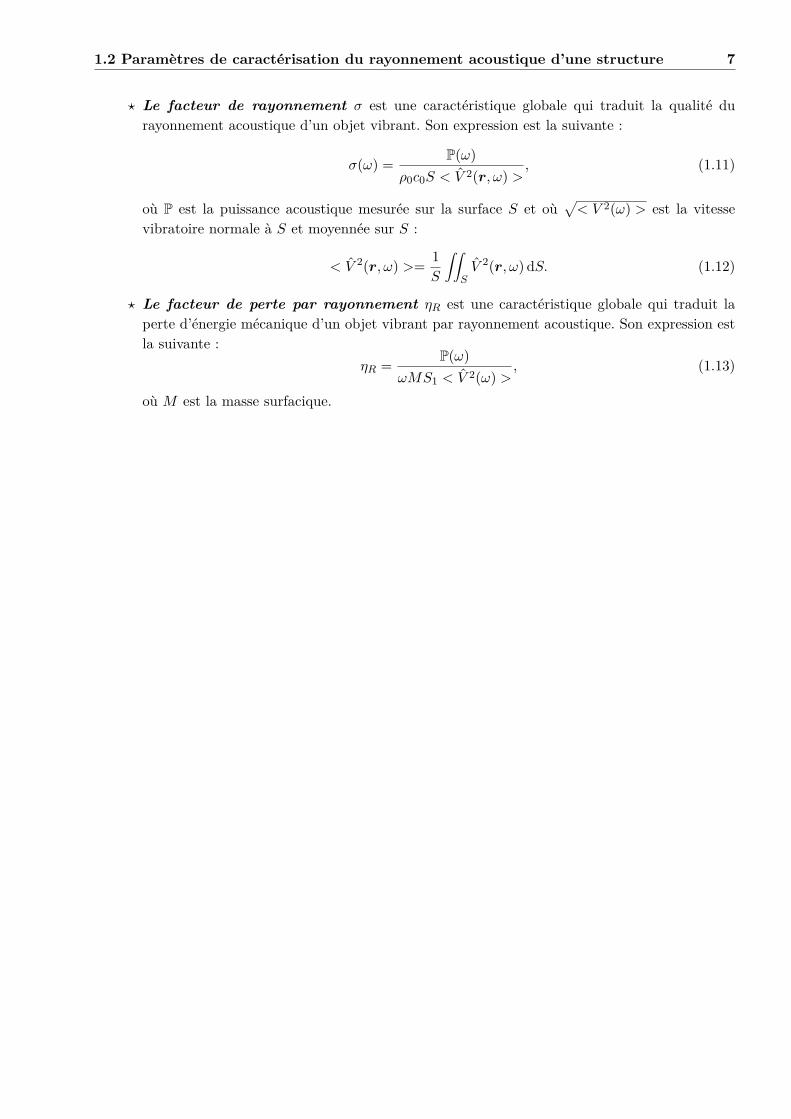
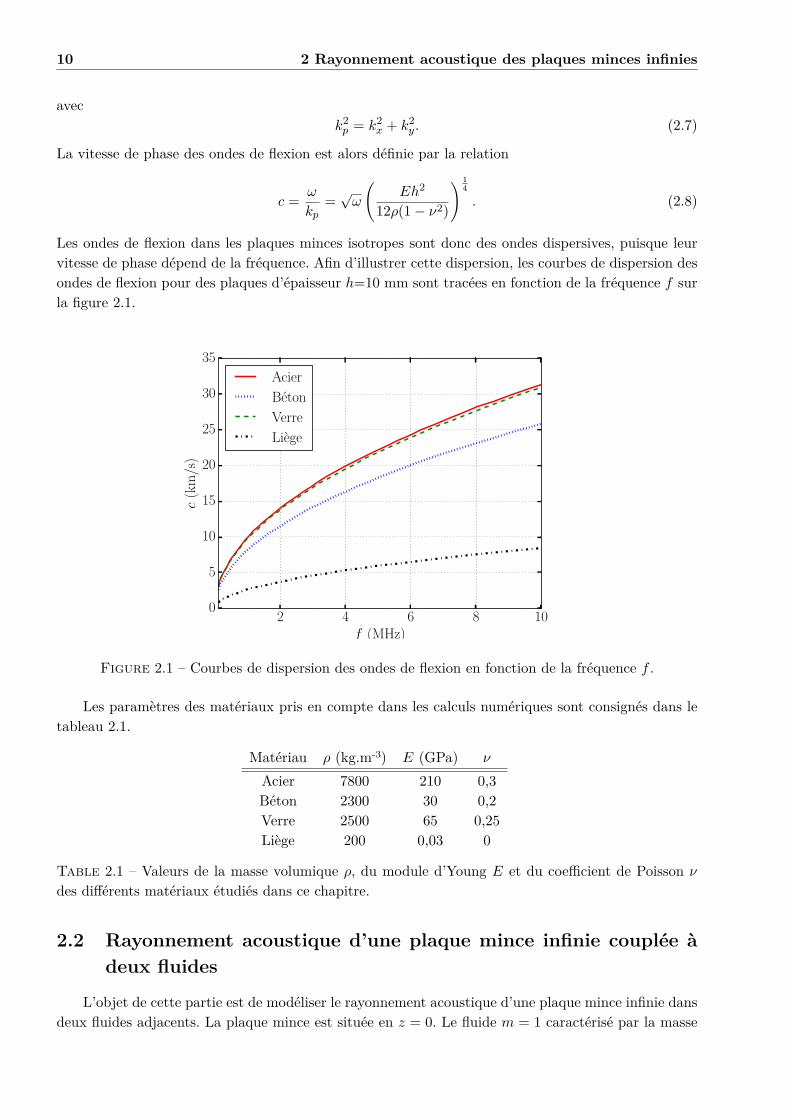
Les ondes de flexion dans les plaques minces isotropes sont donc des ondes dispersives, puisque leurvitesse de phase depend de la frequence. Afin d’illustrer cette dispersion, les courbes de dispersion desondes de flexion pour des plaques d’epaisseur h=10 mm sont tracees en fonction de la frequence f surla figure 2.1.
2 4 6 8 10f (MHz)
0
5
10
15
20
25
30
35
c(k
m/s
)
AcierBetonVerreLiege
Figure 2.1 – Courbes de dispersion des ondes de flexion en fonction de la frequence f .
Les parametres des materiaux pris en compte dans les calculs numeriques sont consignes dans letableau 2.1.
Materiau ρ (kg.m-3) E (GPa) ν
Acier 7800 210 0,3Beton 2300 30 0,2Verre 2500 65 0,25Liege 200 0,03 0
Table 2.1 – Valeurs de la masse volumique ρ, du module d’Young E et du coefficient de Poisson ν
des differents materiaux etudies dans ce chapitre.
2.2 Rayonnement acoustique d’une plaque mince infinie couplee adeux fluides
L’objet de cette partie est de modeliser le rayonnement acoustique d’une plaque mince infinie dansdeux fluides adjacents. La plaque mince est situee en z = 0. Le fluide m = 1 caracterise par la masse

2.2 Rayonnement acoustique d’une plaque mince infinie couplee a deux fluides 11
volumique ρ1 et la celerite du son c1 est situe dans le demi-espace z < 0 et le fluide m = 2 caracterisepar la masse volumique ρ2 et la celerite du son c2 dans le demi-espace z > 0.
2.2.1 Formes des solutions
Les champs de pression acoustique sont consideres harmoniques de pulsation ω,
pm(r, t) = pm(r)ejωt. (2.9)
Les pressions acoustiques pm dans les fluides de part et d’autre de la plaque sont donc solutions del’equation de Helmholtz
(∆ + k2m)pm = 0, avec km = ω/cm. (2.10)
Ces amplitudes ont donc pour expression
pm(x, y, z) =(Cmxe
jkmxx +Dmxe−jkmxx
) (Cmye
jkmyy +Dmye−jkmyy
) (Cmze
jkmzz +Dmze−jkmzz
),
(2.11)avec
k2m = k2
mx + k2my + k2
mz. (2.12)
De plus, la condition de Sommerfeld est respectee dans chaque demi-espace, signifiant qu’il n’y a pasd’onde venant de ±∞ et qui se propage en direction de la plaque. Formellement, cela impose que lesamplitudes D1z et C2z doivent etre nulles. Le champ de pression dans chaque demi-espace peut doncetre mis sous la formep1(x, y, z) =
(C1xe
jk1xx +D1xe−jk1xx
) (C1ye
jk1yy +D1ye−jk1yy
)C1ze
jk1zz,
p2(x, y, z) =(C2xe
jk2xx +D2xe−jk2xx
) (C2ye
jk2yy +D2ye−jk2yy
)D2ze
−jk2zz.(2.13)
Les vibrations de flexion dans la plaque mince sont regies en regime harmonique par l’equation(2.3) dans lequel le terme source fz est une force surfacique orientee selon la normale a la plaque. Dansle cas du rayonnement acoustique des plaques minces separant deux fluides, les pressions acoustiquesdes deux fluides p1 et p2 representent la force fz. Ainsi, l’equation de propagation (2.3) peut etre misesous la forme
D∇4w(x, y)− ω2ρhw(x, y) = p1(x, y, 0)− p2(x, y, 0). (2.14)
La solution de cette equation est de la meme forme que celle de l’expression (2.6). Neanmoins, lesprojections du nombre d’onde ne sont pas les memes car le nombre d’onde kp associe aux vibrationsd’une plaque dans le vide est different du nombre d’onde kc associe aux vibrations d’une plaque coupleea deux milieux fluides. Ainsi, la solution de l’equation (2.14) est donnee par la relation
w(x, y) =(Axe
jkxx +Bxe−jkxx
) (Aye
jkyy +Bye−jkyy
), (2.15)
aveck2c = k2
x + k2y. (2.16)
2.2.2 Conditions aux frontieres
D’apres les lois de Snell-Descartes, les projections des nombre d’ondes selon x et y sont egales :k1x = kx = k2x,
k1y = ky = k2y.(2.17)

12 2 Rayonnement acoustique des plaques minces infinies
Les composantes kmz peuvent donc etre mises sous la forme
k2mz = k2
m − k2x − k2
y. (2.18)
Les conditions aux frontieres sont des conditions de continuite des vitesses normales a l’interface z = 0 :v1(x, y, z).ez = jωw(x, y), en z = 0,v2(x, y, z).ez = jωw(x, y), en z = 0.
(2.19)
Afin d’appliquer ces conditions aux frontieres, il est necessaire de determiner les vitesses normales danschaque milieu. Dans la plaque, la vitesse normale est simplement la derivee temporelle du deplacementw(x, y, t) :
w(x, y, t) = jωw(x, y)ejωt. (2.20)
Dans les fluides, l’equation d’Euler ayant pour expression
ρm∂vm(x, y, z, t)
∂t= − grad pm(x, y, z, t), (2.21)
la composante normale vm(r).ez de la vitesse particulaire est exprimee en fonction de la pressionacoustique par la relation
jωρmvm(x, y, z).ez = −∂pm(x, y, z)∂z
. (2.22)
Les conditions aux frontieres peuvent alors etre mises sous les formes∂p1(x, y, z)
∂z= ρ1ω
2w(x, y), en z = 0,∂p2(x, y, z)
∂z= ρ2ω
2w(x, y), en z = 0.(2.23)
Les pressions des deux fluides en z = 0 peuvent donc etre exprimees en fonction du deplacement desvibrations dans la plaque :
p1(x, y, z = 0) = −j ω2ρ1k1z
w(x, y),
p2(x, y, z = 0) = jω2ρ2k2z
w(x, y).(2.24)
Compte tenu de ces deux expressions, l’equation de propagation des ondes de flexion (2.14) peut etremise sous la forme
D∇4w(x, y)− ω2ρhw(x, y) = −jω2[ρ1k1z
+ ρ2k2z
]w(x, y). (2.25)
Connaissant l’expression du double Laplacien
∆2 = ∇4 =(∂2
∂x2 + ∂2
∂y2
)2
= ∂4
∂x4 + ∂4
∂y4 + 2 ∂2
∂x2∂2
∂y2 , (2.26)
le report de l’expression (2.6) dans l’equation de propagation (2.25) conduit a l’expression
D(k2x + k2
y)2 − ω2ρh = −jω2[ρ1k1z
+ ρ2k2z
]. (2.27)
En tenant compte des expressions (2.16) et (2.18), cette derniere expression peut etre mise sous laforme
k4c − k4
p = −j ω2
D
ρ1√k2
1 − k2c
+ ρ2√k2
2 − k2c
. (2.28)

2.3 Rayonnement acoustique dans le cas de deux fluides legers identiques 13
L’equation (2.28) est l’equation de dispersion des ondes de flexion dans les plaques minces isotropesseparant deux fluides. Sa resolution conduit a la determination du nombre d’onde kc. Une fois cenombre d’onde determine et compte tenu du systeme (2.24), les champs de pression dans les deuxfluides peuvent etre exprimes par les relations
p1(x, y, z) = −j ω2ρ1k1z
w(x, y)ejk1zz,
p2(x, y, z) = jω2ρ2k2z
w(x, y)e−jk2zz.
(2.29)
2.3 Rayonnement acoustique dans le cas de deux fluides legersidentiques
Dans de nombreuses situations, les deux fluides sont les memes, de vitesse du son adiabatiquec1 = c2 = c0 et de masse volumique ρ1 = ρ2 = ρ0. Le nombre d’onde est egalement le meme dansles deux fluides, c’est-a-dire k1 = k2 = k0 = ω/c0. En tenant compte de l’expression (2.5) du nombred’onde kp pour des vibrations de plaque dans le vide, l’equation de dispersion (2.28) devient
(k20 − k2
z)2 − k4p + 2jk4
p
ρ0
ρh√k2
0 − k2c
= 0. (2.30)
En posanta =
√k2c − k2
0 = jkz, (2.31)
cette derniere equation peut etre mise sous la forme suivante :
a5 + 2k20a
3 + a(k40 − k4
p)− 2 ρ0ρhk4p = 0. (2.32)
Cette equation polynomiale de degres 5 possedent evidemment 5 racines dont le sens physique dechacune a ete discute par de nombreux auteurs [1]. Dans le cas de fluides legers (comme l’air parexemple), il a ete demontre numeriquement que le dernier terme de cette equation de dispersion estfaible devant les autres termes et peut donc etre neglige. Dans ce cas, l’equation de dispersion a pourexpression
a4 + 2k20a
2 + k40 − k4
p = 0 (2.33)
et les quatre racines de cette equation de dispersion ont pour expressions
a1 = j√k2
0 + k2p,
a2 = −j√k2
0 + k2p,
a3 = j√k2
0 − k2p,
a4 = −j√k2
0 − k2p.
(2.34)
A ces quatre racines correspondent quatre ondes associees dans la plaque. Afin de discuter sur cesondes, il est necessaire de separer ces racines en deux groupes. En reportant, d’une part, les expressionsdes deux premieres racines a1 et a2 et, d’autre part, les expressions des deux premieres racines a3 eta4, dans l’expression (2.31), il vienta2
1 = a22 = k2
c − k20 = −k2
0 − k2p −→ kc = ±jkp,
a23 = a2
4 = k2c − k2
0 = −k20 + k2
p −→ kc = ±kp.(2.35)
Ainsi, les deux premieres racines correspondent a des ondes evanescentes et les deux dernieres a desondes propagatives. Ces ondes etant differentes, les etudes du rayonnement de ces ondes sont meneesa bien separement dans la suite.

14 2 Rayonnement acoustique des plaques minces infinies
2.3.1 Rayonnement d’ondes evanescentes
Les deux premieres racines a1 et a2 correspondent aux nombres d’ondes k(1)z et k(2)
z definis par lesrelations k
(1)z =
√k2
0 + k2p,
k(2)z = −
√k2
0 + k2p.
(2.36)
La premiere racine k(1)z est reelle positive et est associee aux ondes progressives et la seconde racine
k(2)z est reelle negative et est associee aux ondes regressives. La condition de Sommerfeld a permis
d’eliminer des expressions (2.13) des champs de pression les ondes regressives, c’est-a-dire les ondesassociees a la racine k(2)
z . Le nombre d’onde k(1)z etant reel positif, les ondes evanescentes dans la plaque
rayonnent donc des ondes propagatives dans les fluides. Compte tenu de l’expression de la racine k(1)z ,
les champs de pression associees a ces ondes ont pour expressionsp1(x, y, z) = −j ω2ρ0√
k20 + k2
p
w(x, y)ej√k2
0+k2pz,
p2(x, y, z) = jω2ρ0√k2
0 + k2p
w(x, y)e−j√k2
0+k2pz.
(2.37)
Ainsi, les impedances de rayonnement dans chaque milieu ont pour expression
ZR1 = p1(x, y, z = 0)jωw(x, y) = − k0Z0√
k20 + k2
p
= −ZR2. (2.38)
Les facteurs de rayonnement sont donnes par la relation
σm = Pm12Z0S < (jωw)2 >
, (2.39)
ou la puissance Pm a pour expression
Pm =∫∫
SIm dS, (2.40)
et ou l’intensite acoustique Im = Im.nm dans le cas d’une onde plane est donnee par la relation
Im = 1T
∫ T
0pm(r, t)vm(r, t).nm dt = 1
2<e[pmv?m.nm]. (2.41)
Ici, la normale a la plaque intervenant dans le calcul de l’intensite acoustique I1 etant n1 = −ez etcelle pour l’intensite acoustique I2 etant n2 = ez, les intensites acoustiques ont pour expression
I1 = 12<e[p1v?1.(−ez)] = 1
2<e(ZR1 |ωw|2) = 12ω
2<e(ZR1)|w|2 = −I2, (2.42)
et les facteurs de rayonnement sont alors donnes par la relation
σ1 = −
∫∫S<e(ZR1)|w|2 dS
Z0S < w2 >= k0√
k20 + k2
p
= σ2. (2.43)
Le facteur de rayonnement σm associe a des ondes de flexion evanescentes est trace en fonction de lafrequence f sur la figure 2.2. Les plaques sont d’epaisseur h = 10 mm et sont placees dans l’air.
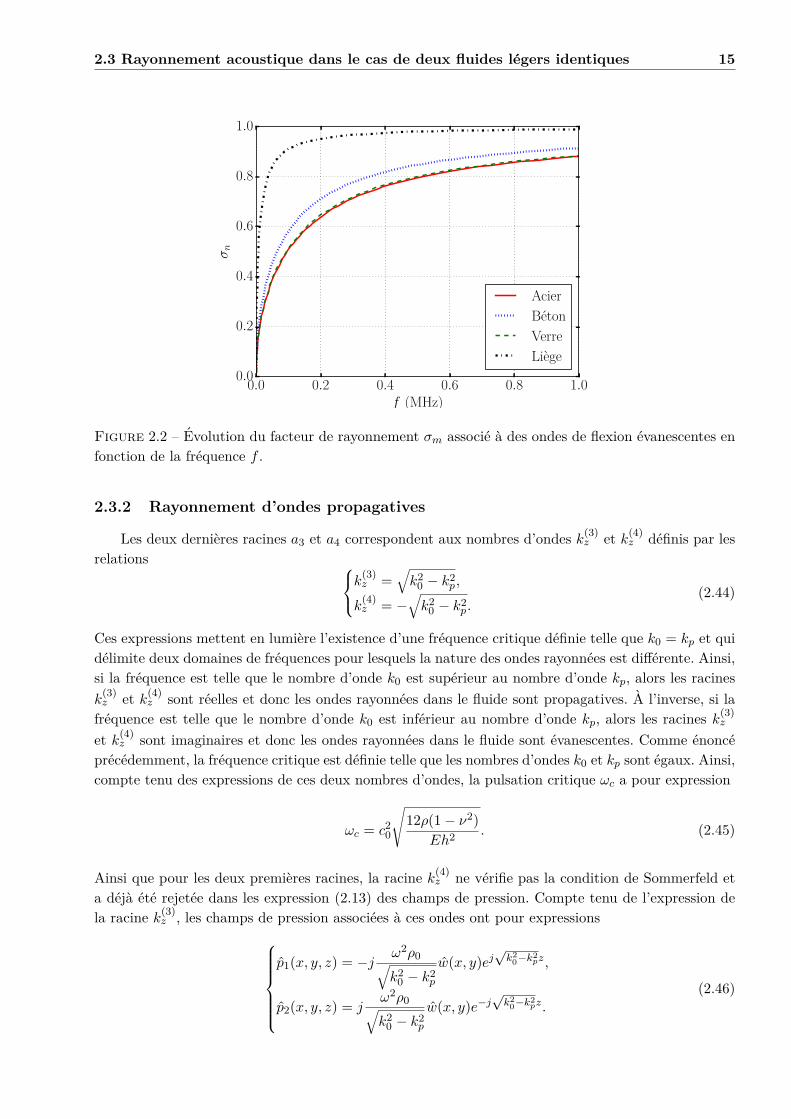
2.3 Rayonnement acoustique dans le cas de deux fluides legers identiques 15
0.0 0.2 0.4 0.6 0.8 1.0f (MHz)
0.0
0.2
0.4
0.6
0.8
1.0
σn
AcierBetonVerreLiege
Figure 2.2 – Evolution du facteur de rayonnement σm associe a des ondes de flexion evanescentes enfonction de la frequence f .
2.3.2 Rayonnement d’ondes propagatives
Les deux dernieres racines a3 et a4 correspondent aux nombres d’ondes k(3)z et k(4)
z definis par lesrelations k
(3)z =
√k2
0 − k2p,
k(4)z = −
√k2
0 − k2p.
(2.44)
Ces expressions mettent en lumiere l’existence d’une frequence critique definie telle que k0 = kp et quidelimite deux domaines de frequences pour lesquels la nature des ondes rayonnees est differente. Ainsi,si la frequence est telle que le nombre d’onde k0 est superieur au nombre d’onde kp, alors les racinesk
(3)z et k(4)
z sont reelles et donc les ondes rayonnees dans le fluide sont propagatives. A l’inverse, si lafrequence est telle que le nombre d’onde k0 est inferieur au nombre d’onde kp, alors les racines k(3)
z
et k(4)z sont imaginaires et donc les ondes rayonnees dans le fluide sont evanescentes. Comme enonce
precedemment, la frequence critique est definie telle que les nombres d’ondes k0 et kp sont egaux. Ainsi,compte tenu des expressions de ces deux nombres d’ondes, la pulsation critique ωc a pour expression
ωc = c20
√12ρ(1− ν2)
Eh2 . (2.45)
Ainsi que pour les deux premieres racines, la racine k(4)z ne verifie pas la condition de Sommerfeld et
a deja ete rejetee dans les expression (2.13) des champs de pression. Compte tenu de l’expression dela racine k(3)
z , les champs de pression associees a ces ondes ont pour expressionsp1(x, y, z) = −j ω2ρ0√
k20 − k2
p
w(x, y)ej√k2
0−k2pz,
p2(x, y, z) = jω2ρ0√k2
0 − k2p
w(x, y)e−j√k2
0−k2pz.
(2.46)
16 2 Rayonnement acoustique des plaques minces infinies
Ainsi, les impedances de rayonnement dans chaque milieu ont pour expression
ZR1 = p1(x, y, z = 0)jωw(x, y) = − k0Z0√
k20 − k2
p
= −ZR2 . (2.47)
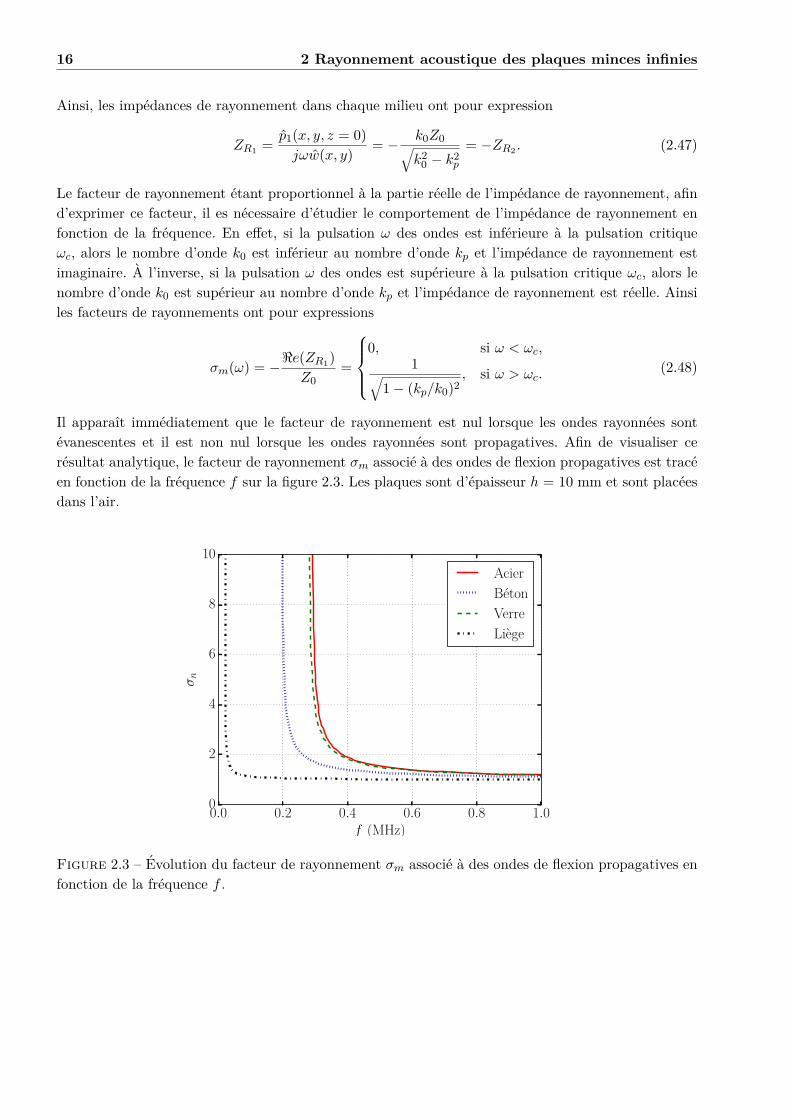
Le facteur de rayonnement etant proportionnel a la partie reelle de l’impedance de rayonnement, afind’exprimer ce facteur, il es necessaire d’etudier le comportement de l’impedance de rayonnement enfonction de la frequence. En effet, si la pulsation ω des ondes est inferieure a la pulsation critiqueωc, alors le nombre d’onde k0 est inferieur au nombre d’onde kp et l’impedance de rayonnement estimaginaire. A l’inverse, si la pulsation ω des ondes est superieure a la pulsation critique ωc, alors lenombre d’onde k0 est superieur au nombre d’onde kp et l’impedance de rayonnement est reelle. Ainsiles facteurs de rayonnements ont pour expressions
σm(ω) = −<e(ZR1)Z0
=
0, si ω < ωc,
1√1− (kp/k0)2
, si ω > ωc.(2.48)
Il apparaıt immediatement que le facteur de rayonnement est nul lorsque les ondes rayonnees sontevanescentes et il est non nul lorsque les ondes rayonnees sont propagatives. Afin de visualiser ceresultat analytique, le facteur de rayonnement σm associe a des ondes de flexion propagatives est traceen fonction de la frequence f sur la figure 2.3. Les plaques sont d’epaisseur h = 10 mm et sont placeesdans l’air.
0.0 0.2 0.4 0.6 0.8 1.0f (MHz)
0
2
4
6
8
10
σn
AcierBetonVerreLiege
Figure 2.3 – Evolution du facteur de rayonnement σm associe a des ondes de flexion propagatives enfonction de la frequence f .

Chapitre 3
Rayonnement acoustique des plaques mincesde dimensions finies
Dans le cas ou la longueur d’onde des ondes acoustiques rayonnees est du meme ordre de grandeurou superieure aux dimensions de la plaque, la plaque ne peut plus etre consideree comme infinie. Celase traduit inevitablement par la prise en compte des conditions aux frontieres sur les bords de laplaque dans la modelisation des vibrations de cette derniere. Neanmoins, une modelisation analytiquedes vibrations de plaque n’etant possible que dans le cas des plaques simplement appuyees sur lesbords, ce chapitre traite de la theorie du rayonnement acoustique de facon tres generale sans expliciterle type de conditions aux frontieres.
3.1 Vibrations de plaques minces dans le vide
3.1.1 Formulation generale
La plaque est caracterisee par le module d’Young E, le coefficient de Poisson ν et la massevolumique ρ. La rigidite de flexion est notee D. La largeur de la plaque suivant x est notee Lx, salongueur suivant y est notee Ly et son epaisseur est notee h. Dans le vide et en l’absence de source,les vibrations sont regies par l’equation de propagation
∇4w(x, y)− k4pw(x, y) = 0, (3.1)
aveck4p = ω2ρh
D. (3.2)
Les solutions de l’equation de propagation (3.1) sont de la forme
w(x, y) = A1 sin(kxx) sin(kyy) +B1 sin(kxx) cos(kyy) + C1 cos(kxx) sin(kyy)+D1 cos(kxx) cos(kyy) +A2 sinh(kxx) sinh(kyy) +B2 sinh(kxx) cosh(kyy)+ C2 cosh(kxx) sinh(kyy) +D2 cosh(kxx) cosh(kyy), (3.3)
aveck2p = k2
x + k2y. (3.4)
Les amplitudes An, Bn, Cn et Dn sont ensuite determinees a partir des conditions aux frontieres surles bords de la plaque. Les conditions aux frontieres classiques sont l’encastrement, l’appui simple et lasurface libre. Outre le deplacement w, ces conditions aux frontieres peuvent faire intervenir les pentes
θx(x, y) = ∂w
∂yet θy(x, y) = −∂w
∂x, (3.5)
17

18 3 Rayonnement acoustique des plaques minces de dimensions finies
les efforts tranchants
Tx(x, y) = −D(∂3w
∂x3 + ∂3w
∂x∂y2
)et Ty(x, y) = D
[∂3w
∂y3 − (1− 2ν) ∂3w
∂x2∂y
], (3.6)
et les moments flechissant
Mx(x, y) = −D(∂2w
∂x2 + ν∂2w
∂y2
)et My(x, y) = −D
(∂2w
∂y2 + ν∂2w
∂x2
). (3.7)
La recherche des solutions conduit a exprimer le deplacement w sous la forme d’un developpementmodal
w(x, y) =∑m,n
Amnψmn(x, y), (3.8)
ou Amn et ψmn(x, y) sont respectivement l’amplitude et la fonction propre du mode (m,n). Lesfonctions propres sont determinees a partir du probleme comportant l’equation de propagation (3.1)et les conditions aux frontieres. Elles ont aussi la particularite fondamentale d’etre des fonctionsorthogonales et normees, c’est-a-dire verifiant la relation d’orthogonalite :∫ Lx
0
∫ Ly
0ψmn(x, y)ψpq(x, y) dx dy = δmpδnq. (3.9)
3.1.2 Cas d’une plaque simplement appuyee
Une modelisation analytique des vibrations de plaque n’etant possible uniquement que dans le casd’une plaque simplement appuyee, seul ce type de conditions aux frontieres ne sera etudie dans cettepartie. Ainsi, dans ce cas, les deplacements verticaux et les moments de flexion selon x et y sont nulssur les bords de la plaque. Les conditions aux frontieres ont alors pour expressionsw(0, y) = 0,
Mx(0, y) = 0,
w(Lx, y) = 0,Mx(Lx, y) = 0,
w(x, 0) = 0,My(x, 0) = 0,
et
w(x, Ly) = 0,My(x, Ly) = 0.
(3.10)
En appliquant les conditions aux frontieres en x = 0, il vient le systeme d’equationsC1 sin(kyy) +D1 cos(kyy) + C2 sinh(kyy) +D2 cosh(kyy) = 0,−C1 sin(kyy)−D1 cos(kyy) + C2 sinh(kyy) +D2 cosh(kyy) = 0.
(3.11)
La resolution de ce systeme conduit aux expressionsC1 sin(kyy) +D1 cos(kyy) = 0,C2 sinh(kyy) +D2 cosh(kyy) = 0,
(3.12)
et ainsi le deplacement peut etre mis sous la forme
w(x, y) = A1 sin(kxx) sin(kyy) +B1 sin(kxx) cos(kyy)+A2 sinh(kxx) sinh(kyy) +B2 sinh(kxx) cosh(kyy). (3.13)
En appliquant les conditions aux frontieres en y = 0, il vient maintenant le systeme d’equations+B1 sin(kxx) +B2 sinh(kxx) = 0,−B1 sin(kxx) +B2 sinh(kxx) = 0,
(3.14)

3.1 Vibrations de plaques minces dans le vide 19
dont la solution est B1 = B2 = 0. Le deplacement a donc desormais pour expression
w(x, y) = A1 sin(kxx) sin(kyy) +A2 sinh(kxx) sinh(kyy). (3.15)
Les conditions aux frontieres en x = Lx conduisent au systeme d’equation
A1 sin(kxLx) sin(kyy) +A2 sinh(kxLx) sinh(kyy) = 0,−A1 sin(kxLx) sin(kyy) +A2 sinh(kxLx) sinh(kyy) = 0,
(3.16)
d’ou A1 sin(kxLx) = 0,A2 sinh(kxLx) = 0.
(3.17)
Le sinus hyperbolique sinh(x) ne s’annule pas excepte pour x = 0, donc le coefficient A2 estobligatoirement nul. En revanche, la premiere equation a une infinite de solutions de la forme
kxn = nπ
Lx, avec n ∈ N. (3.18)
En procedant de la meme maniere pour les condition aux frontieres en y = Ly, il vient
kym = mπ
Ly, avec m ∈ N. (3.19)
La solution du probleme correspondant aux conditions aux frontieres (3.10) a donc pour expression
ψmn(x, y) = Nnm sin(kxmx) sin(kyny), (3.20)
ou l’amplitude Nnm est calculee en utilisant la relation d’orthogonalite (3.9)
Nnm = 2√LxLy
. (3.21)
Le deplacement peut finalement etre mis sous la forme (3.8) ou la fonction propre ψmn(x, y) a pourexpression
ψmn(x, y) = 2√LxLy
sin(kxmx) sin(kyny). (3.22)
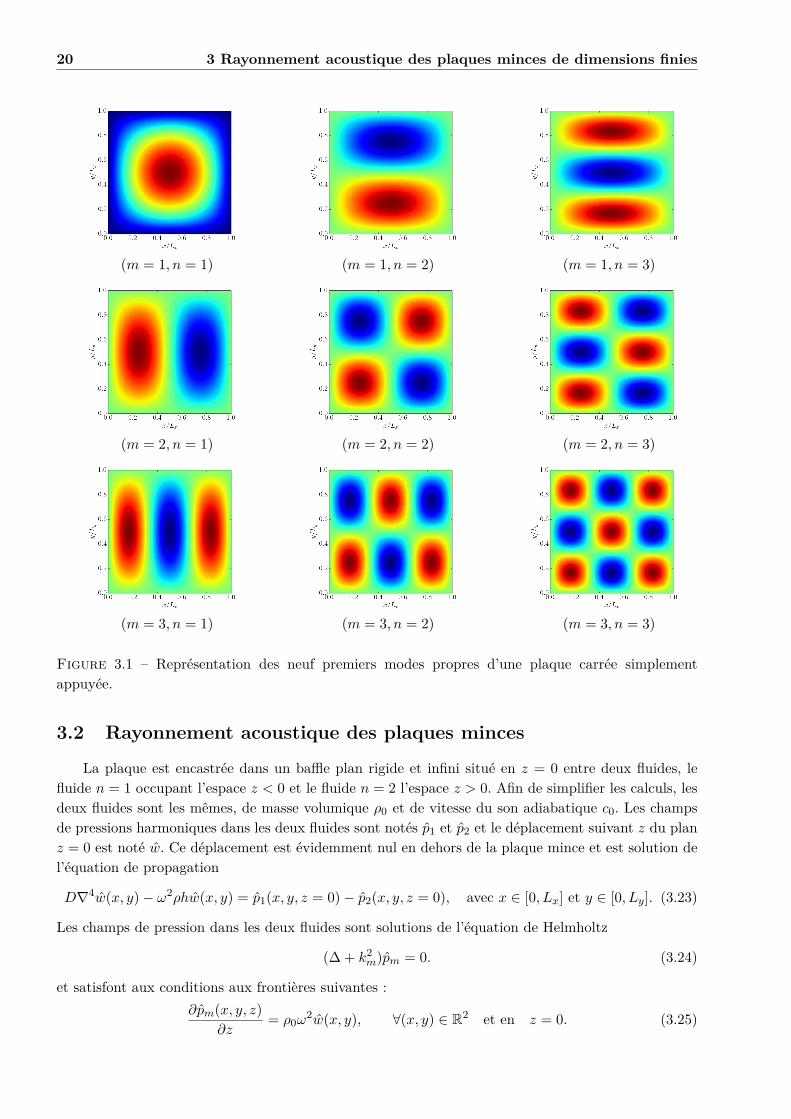
Les neuf premiers modes propres de la plaque simplement appuyee dans le vide sont representes surla figure 3.1.
20 3 Rayonnement acoustique des plaques minces de dimensions finies
(m = 1, n = 1) (m = 1, n = 2) (m = 1, n = 3)
(m = 2, n = 1) (m = 2, n = 2) (m = 2, n = 3)
(m = 3, n = 1) (m = 3, n = 2) (m = 3, n = 3)
Figure 3.1 – Representation des neuf premiers modes propres d’une plaque carree simplementappuyee.
3.2 Rayonnement acoustique des plaques minces
La plaque est encastree dans un baffle plan rigide et infini situe en z = 0 entre deux fluides, lefluide n = 1 occupant l’espace z < 0 et le fluide n = 2 l’espace z > 0. Afin de simplifier les calculs, lesdeux fluides sont les memes, de masse volumique ρ0 et de vitesse du son adiabatique c0. Les champsde pressions harmoniques dans les deux fluides sont notes p1 et p2 et le deplacement suivant z du planz = 0 est note w. Ce deplacement est evidemment nul en dehors de la plaque mince et est solution del’equation de propagation
D∇4w(x, y)− ω2ρhw(x, y) = p1(x, y, z = 0)− p2(x, y, z = 0), avec x ∈ [0, Lx] et y ∈ [0, Ly]. (3.23)
Les champs de pression dans les deux fluides sont solutions de l’equation de Helmholtz
(∆ + k2m)pm = 0. (3.24)
et satisfont aux conditions aux frontieres suivantes :∂pm(x, y, z)
∂z= ρ0ω
2w(x, y), ∀(x, y) ∈ R2 et en z = 0. (3.25)

3.2 Rayonnement acoustique des plaques minces 21
La pression acoustique dans les deux fluides et le deplacement dans la plaque sont recherches par unedouble transformee de Fourier spatiales
ϕ(kx, ky, z) =∫ +∞
−∞
∫ +∞
−∞ϕ(x, y, z)e−j(kxx+kyy) dx dy. (3.26)
Dans l’espace (kx, ky, z), l’equation de Helmholtz (3.24) se reduit a l’equation
∂2pm(kx, ky, z)∂z2 + k2
z pm(kx, ky, z) = 0, (3.27)
aveck2
0 = k2x + k2
y + k2z , (3.28)
et les solutions repondant egalement a la condition de Sommerfeld ont pour expressionsp1(kx, ky, z) = Aejkzz,
p2(kx, ky, z) = Be−jkzz.(3.29)
Compte tenu des conditions aux frontieres (3.25), les amplitudes A et B ont pour expressionsrespectives :
A = −j ρ0ω2
kzw(kx, ky),
B = jρ0ω
2
kzw(kx, ky).
(3.30)
Ainsi, en appliquant la double transformee de Fourier spatiale inverse
ϕ(x, y, z) = 14π2
∫ +∞
−∞
∫ +∞
−∞ϕ(kx, ky, z)ej(kxx+kyy) dkx dky, (3.31)
les champs de pression peuvent etre mis sous les formesp1(x, y, z) = −j ρ0ω
2
4π2
∫ +∞
−∞
∫ +∞
−∞
w(kx, ky)kz
ejkzzej(kxx+kyy) dkx dky,
p2(x, y, z) = jρ0ω
2
4π2
∫ +∞
−∞
∫ +∞
−∞
w(kx, ky)kz
e−jkzzej(kxx+kyy) dkx dky.(3.32)
Afin de quantifier le rayonnement acoustique des plaques minces, il est necessaire de determinerles champs de pression sur les surfaces de la plaque. Ces champs de pression etant dependant dudeplacement w, ils peuvent etre recherches sous la forme d’un developpement modal
pm(x, y, z = 0) =∑p,q
B(m)pq ψpq(x, y), (3.33)
dont les amplitudes B(m)pq sont donnees par les relations
B(m)pq =
∫ Lx
0
∫ Ly
0pm(x, y, z = 0)ψpq(x, y) dx dy. (3.34)
Le champ de deplacement dans la plaque est recherche sous la forme du developpement modal (3.8)qui devient dans l’espace (kx, ky, z) :
w(kx, ky) =∑p,q
Apqψpq(kx, ky). (3.35)

22 3 Rayonnement acoustique des plaques minces de dimensions finies
Compte tenu des expressions (3.32), (3.34) et (3.35), les coefficients B(m)pq peuvent etre mis sous les
formesB(m)rs = (−1)mjω
∑p,q
ApqZpqrs, (3.36)
ou l’impedance intermodale Zpqrs est definie par la relation,
Zpqrs = k0Z04π2
∫ Lx
0
∫ Ly
0ψrs(x, y)
[∫∫ +∞
−∞
ψpq(kx, ky)kz
ej(kxx+kyy) dkx dky
]dx dy (3.37)
ou encoreZpqrs = k0Z0
4π2
∫∫ +∞
−∞
ψpq(kx, ky)ψrs(−kx,−ky)kz
dkx dky. (3.38)
L’impedance intermodale est une matrice de dimension infinie dont les termes non diagonauxrepresentent le couplage entre les modes de la plaque dus a l’interaction entre la plaque et les fluides.Ces couplages sont toutefois negligeables dans le cas de fluides legers. De plus, cette impedance estgeneralement mise sous la forme
Zpqrs = Rpqrs + jXpqrs (3.39)ou Rpqrs et Xpqrs sont evidemment les parties reelle et imaginaire de l’impedance intermodale. Leschamps de pression peuvent donc etre mis sous la forme
pm(x, y, z = 0) = (−1)mjω∑p,q
∑r,s
ApqZpqrsψrs(x, y). (3.40)
De plus, la puissance acoustique rayonnee dans chaque fluide ayant pour expression
Pm = (−1)m+1
2
∫∫S<e [jωpm(x, y, z = 0)w?(x, y)] dS, (3.41)
et compte tenu des expressions (3.25) et (3.8) et de l’orthogonalite des fonctions propres, la puissancepeut alors etre mise sous la forme
Pm = ω2
2∑p,q
∑r,s
<e [ApqZpqrsA?rs] . (3.42)
Dans le cas de fluides legers, les couplages de modes etant negligeables, la puissance rayonnee peutetre donnee par l’expression approchee
Pm = ω2
2∑p,q
Rpqpq|Apq|2. (3.43)
Dans ce cas, le facteur de rayonnement a pour expression
σm =
ω2
2∑p,q
Rpqpq|Apq|2
Z0S < V 2 >, (3.44)
avec< V 2 >= 1
2S
∫S|jωw|2 dS = ω2
2S∑p,q
|Apq|2. (3.45)
Le facteur de rayonnement peut alors etre mis sous la forme
σm =
∑p,q
Rpqpq|Apq|2
Z0∑r,s
|Ars|2=
∑p,q
σpq|Apq|2∑r,s
|Ars|2, (3.46)
ou le facteur de rayonnement du mode (m, p) a pour expression
σpq = RpqpqZ0
. (3.47)

Chapitre 4
Transparence acoustique de plaques minces
L’interaction d’une onde plane incidente avec une interface separant deux fluides donne naissancea une onde plane reflechie et a une onde plane transmise. Si l’interface est une plaque mince, lesmecanismes de reflexion et transmission sont les memes, mais l’interaction de l’onde plane avec laplaque induit en plus la mise en vibration de cette derniere modifiant ainsi les ondes reflechie ettransmise. L’objectif de cette partie est alors d’etudier ce phenomene de ”transparence acoustique”d’une plaque placee dans un seul et meme fluide. Les resultats presentes dans ce chapitre peuventevidemment etre generalises a des fluides differents.
4.1 Transparence acoustique d’une plaque mince infinie
L’objet de cette partie est de modeliser la transparence acoustique d’une plaque mince infinie dansdeux fluides adjacents. La plaque mince est situee en z = 0. Les fluides sont caracterises par la massevolumique ρ0 et la celerite du son c0.
4.1.1 Determination des amplitudes des ondes
On s’interesse dans un premier temps a la reflexion et la transmission d’une onde plane incidentese propageant dans la direction u = (sin θ cosϕ, sin θ sinϕ, cos θ). La pression acoustique harmoniqueassociee a cette onde de nombre d’onde k0 = k0.u a pour expression
pi(x, y, z) = Ae−jk0(sin θ cosϕx+sin θ sinϕy+cos θz). (4.1)
Compte tenu de la loi de Snell-Descartes, les composantes tangentielles des vecteurs d’ondes sontegales dans chaque milieu. Ainsi, les champs de pressions harmoniques dans les deux fluides ont pourexpressionsp1(x, y, z) = pi(x, y, z) + pr(x, y, z) = Ae−jk0(sin θ cosϕx+sin θ sinϕy)
(e−jk0 cos θz + rejk0 cos θz
),
p2(x, y, z) = pt(x, y, z) = tAe−jk0(sin θ cosϕx+sin θ sinϕy)e−jk0 cos θz,
(4.2)ou r et t sont respectivement les coefficients de reflexion et de transmission en amplitude.
Le deplacement suivant z dans la plaque a pour expression
w(x, y) = AWe−jk0(sin θ cosϕx+sin θ sinϕy), (4.3)
ou le produit AW represente l’amplitude de l’onde dans la plaque. Afin de determiner les coefficientsde reflexion et de transmission, il est necessaire de reporter les expressions des champs de pression
23

24 4 Transparence acoustique de plaques minces
dans les fluides et celle du champ de deplacement dans la plaque dans l’equation de propagation desondes dans la plaque (2.14) et dans les conditions aux frontieres (2.23) :
[D(k0 sin θ)4 − ω2ρh
]W = 1 + r − t
jk0 cos θ(r − 1) = ρ1ω2W,
−jk0 cos θt = ρ2ω2W.
(4.4)
La resolution de ce systeme d’equation conduit ensuite a l’expression des coefficients r, t et W :
W =
2D
(k0 sin θ)4 − k4p + 2jωZ0
D cos θr =
(k0 sin θ)4 − k4p
(k0 sin θ)4 − k4p + 2jωZ0
D cos θ
,
t =2jω Z0
D cos θ(k0 sin θ)4 − k4
p + 2jωZ0D cos θ
.
(4.5)
4.1.2 Indice d’affaiblissement dans le cas des ondes planes
La transparence acoustique d’une plaque mince se calcule a partir du rapport entre la puissancePt portee par l’onde transmise et la puissance Pi portee par l’onde incidente :
τ(ω, θ, ϕ) = PtPi. (4.6)
Il a ete vu precedemment que le calcul de la puissance acoustique fait intervenir la pression et la vitessenormale associees a chaque onde. Le fluide etant le meme de part et d’autre de la plaque, les lois deSnell-Descartes imposent que l’onde incidente et l’onde transmise sont toutes les deux orientees selonla direction u. En tenant compte de l’equation d’Euler (2.21), la vitesse particulaire acoustique peutetre exprimee en fonction de la pression acoustique par la relation
vi,t = pi,tZ0
u, (4.7)
et ainsi la puissance acoustique a pour expression
Pi,t = 12
∫∫S<e[pi,tv?i,t.n] dS = 1
2Z0u.n
∫∫S|pi,t|2 dS. (4.8)
La normale a la plaque ayant pour expression n = ez et compte tenu des expressions des champsde pressions acoustiques associes aux ondes incidente et transmise, les puissances Pi et Pt ont pourexpressions respectives
Pi = 12Z0
cos θ|A|2S,
Pt = 12Z0
cos θ|tA|2S,(4.9)
et ainsi la transparence acoustique de la plaque est donnee par la relation
τ(ω, θ, ϕ) = |t|2 = (2ωZ0)2
D2 cos2 θ[(k0 sin θ)4 − k4
p
]2+ (2ωZ0)2
. (4.10)

4.1 Transparence acoustique d’une plaque mince infinie 25
Ainsi, la transparence acoustique de la paroi ne depend pas de l’angle ϕ. Apres avoir defini la frequencede coıncidence
ωco = c20
sin2 θ
√ρh
D= c2
0sin2 θ
k2p
ω, (4.11)
la transparence acoustique peut etre mise sous la forme
τ(ω, θ, ϕ) = 1
1 +(ρωh cos θ
2Z0
)2( ω2
ω2co
− 1)2 . (4.12)
Afin d’etudier la transparence acoustique sur une large bande de frequence, l’indice d’affaiblissement,defini par la relation
R = 10 log10
(1τ
)= 10 log10
1 +(ρωh cos θ
2Z0
)2( ω2
ω2co
− 1)2 , (4.13)
est plus souvent utilise. Si la plaque est transparente, c’est-a-dire si la puissance incidente Pi est egalea la puissance transmise Pt, alors l’indice d’affaiblissement est nul. A l’inverse, si la plaque est opaque,c’est-a-dire si la puissance transmise Pt est nulle, l’indice d’affaiblissement tend alors vers l’infini.
L’indice d’affaiblissement R est trace sur la figure 4.1 en fonction de la frequence pour quatreangles d’incidence θ = 0, θ = π
6 , θ = π4 et θ = π
3 . Le materiau utilise est du verre d’epaisseur h = 1 cm.
101 102 103 104
f (Hz)
0
2
4
6
8
10
12
14
16
R
θ = 0θ = π/6θ = π/4θ = π/3
Figure 4.1 – Evolution de l’indice d’affaiblissement R en fonction de la frequence pour quatre anglesd’incidence θ = 0 (—), θ = π
6 (...), θ = π
4 (- -) et θ = π
3 (-.-).
Le comportement asymptotique de cette courbe peut etre deduit analytiquement selon les valeursde ω par rapport a la pulsation de coıncidence ωco.
? Si ω � ωco :L’indice d’affaiblissement a pour expression approchee
Rmin = 10 log10
[1 +
(ρωh cos θ
2Z0
)2]≈ 20 log10
[ρh cos θ
2Z0
]+ 20 log10 ω. (4.14)
26 4 Transparence acoustique de plaques minces
Il croıt donc de 6 dB par octave (doublement de frequence). Cette loi est connue sous le nom de loi demasse car elle ne fait intervenir que la masse surfacique Ms = ρh de la plaque. Tout se passe commesi la plaque etait une simple masse.
? Si ω = ωco :L’indice d’affaiblissement est nul et donc la plaque est parfaitement transparente. Ce phenomene peuts’averer tres penalisant en terme d’isolation acoustique. En pratique, l’indice d’affaiblissement n’estjamais nul. Pour modeliser ce fait, il est necessaire de prendre en compte dans la modelisation despertes structurelles dans la plaque.
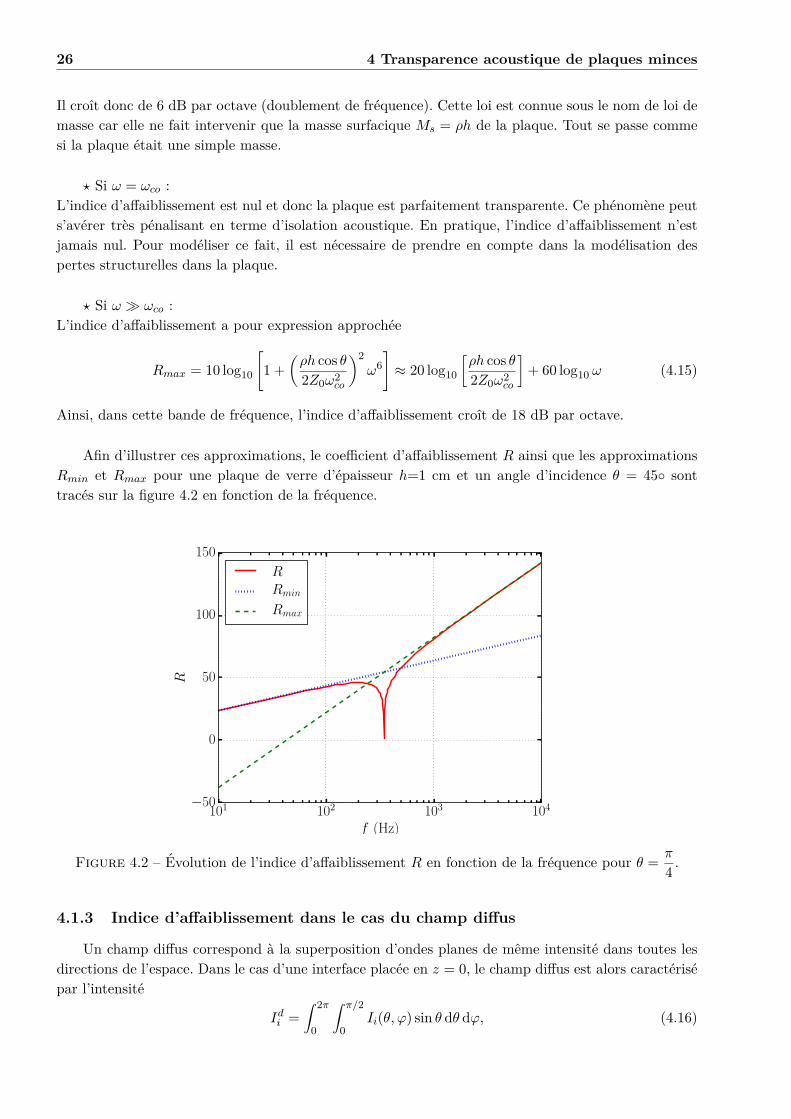
? Si ω � ωco :L’indice d’affaiblissement a pour expression approchee
Rmax = 10 log10
[1 +
(ρh cos θ2Z0ω2
co
)2ω6]≈ 20 log10
[ρh cos θ2Z0ω2
co
]+ 60 log10 ω (4.15)
Ainsi, dans cette bande de frequence, l’indice d’affaiblissement croıt de 18 dB par octave.
Afin d’illustrer ces approximations, le coefficient d’affaiblissement R ainsi que les approximationsRmin et Rmax pour une plaque de verre d’epaisseur h=1 cm et un angle d’incidence θ = 45◦ sonttraces sur la figure 4.2 en fonction de la frequence.
101 102 103 104
f (Hz)
−50
0
50
100
150
R
RRmin
Rmax
Figure 4.2 – Evolution de l’indice d’affaiblissement R en fonction de la frequence pour θ = π
4 .
4.1.3 Indice d’affaiblissement dans le cas du champ diffus
Un champ diffus correspond a la superposition d’ondes planes de meme intensite dans toutes lesdirections de l’espace. Dans le cas d’une interface placee en z = 0, le champ diffus est alors caracterisepar l’intensite
Idi =∫ 2π
0
∫ π/2
0Ii(θ, ϕ) sin θ dθ dϕ, (4.16)
4.1 Transparence acoustique d’une plaque mince infinie 27
ou Ii(θ, ϕ) est l’intensite selon la direction z d’une onde plane se propageant dans la directionu = (sin θ cosϕ, sin θ sinϕ, cos θ). En reprenant les expressions pour le cas de l’excitation par uneonde plane, il vient
Idi =∫ 2π
0
∫ π/2
0
12pi(vi.ez)
? sin θ dθ dϕ =∫ 2π
0
∫ π/2
0
12Z0
pip?i cos θ sin θ dθ dϕ, (4.17)
d’ouIdi = π|pi|2
2Z0. (4.18)
Le champ acoustique transmis au travers de l’interface est aussi un champ diffus caracterise parl’intensite
Idt =∫ 2π
0
∫ π/2
0It(θ, ϕ) sin θ dθ dϕ = |pi|
2
2Z0
∫ 2π
0
∫ π/2
0τ(ω, θ, ϕ) cos θ sin θ dθ dϕ. (4.19)
La transparence acoustique dans le cas d’une excitation par un champ diffus est alors defini par larelation
τd = IdtIdi
= 2∫ 2π
0
∫ π/2
0τ(ω, θ) cos θ sin θ dθ dϕ = 2
∫ π/2
0τ(ω, θ) sin θ cos θ dθ. (4.20)
et l’indice d’affaiblissement a pour expression
Rd = 10 log10
( 1τd
). (4.21)
Si la frequence est tres inferieure a la frequence de coıncidence, la transparence acoustique peutetre donnee par l’approximation
τd = 2∫ π/2
0
1
1 +(ρωh cos θ
2Z0
)2 sin θ cos θ dθ. (4.22)
En posant le changement de variable
z = 1 +(ρωh cos θ
2Z0
)2, (4.23)
il vient immediatement
τd =( 2Z0ρωh
)2ln[1 +
(ρωh
2Z0
)2]. (4.24)
En posant R0 = R(ω, θ = 0) et en tenant compte de la relation
log10(x) = ln(x)ln(10) , (4.25)
l’indice d’affaiblissement peut etre mis sous la forme
Rdmin = R0 − 10 log10
( ln(10)10 R0
)≈ R0 − 10 log10 (0, 23R0) . (4.26)
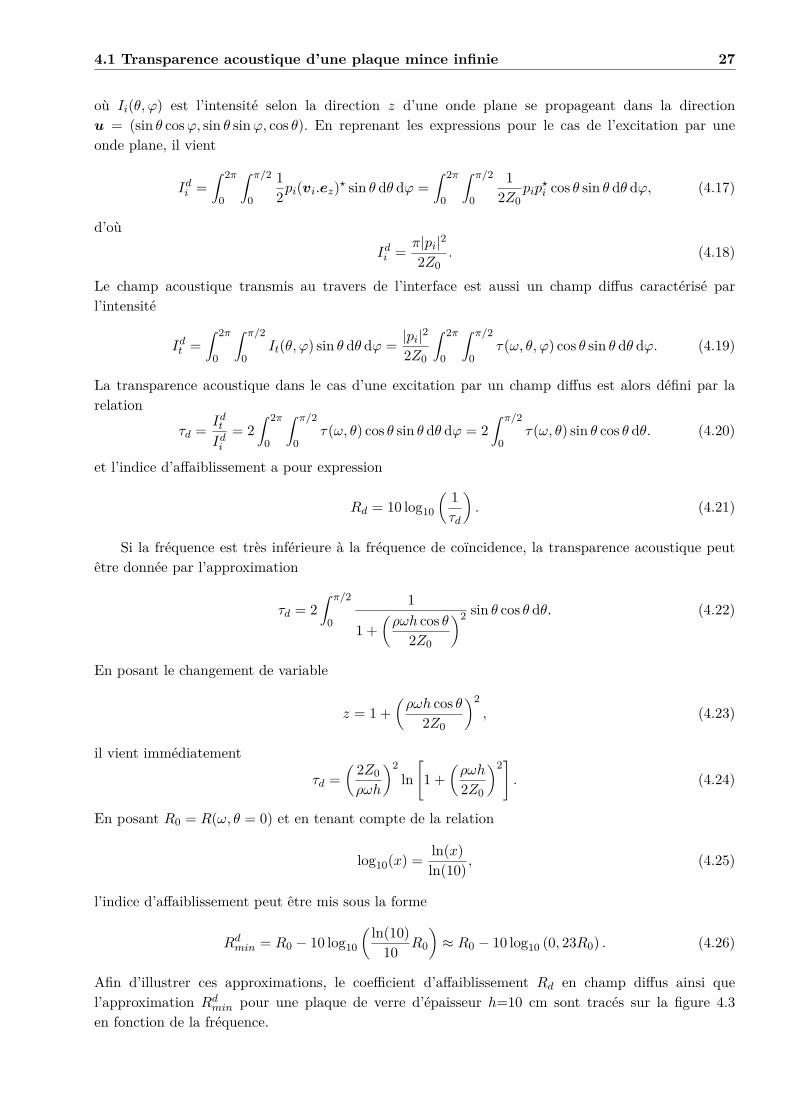
Afin d’illustrer ces approximations, le coefficient d’affaiblissement Rd en champ diffus ainsi quel’approximation Rdmin pour une plaque de verre d’epaisseur h=10 cm sont traces sur la figure 4.3en fonction de la frequence.
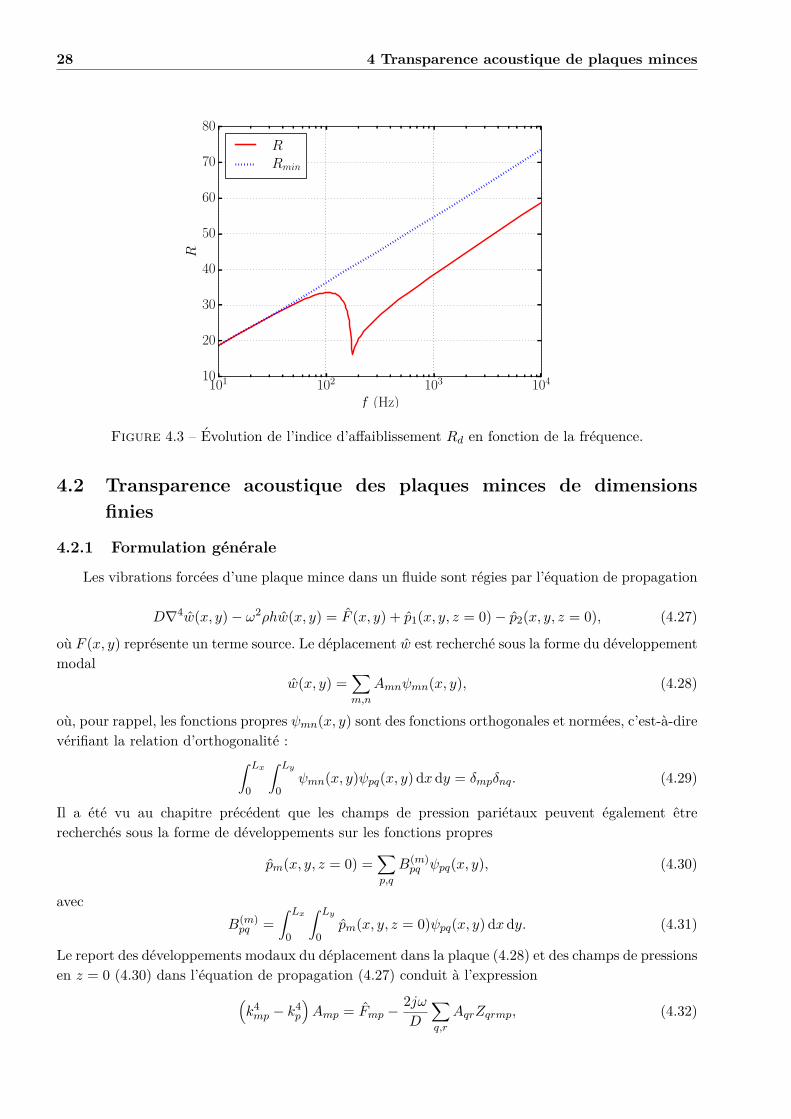
28 4 Transparence acoustique de plaques minces
101 102 103 104
f (Hz)
10
20
30
40
50
60
70
80
R
RRmin
Figure 4.3 – Evolution de l’indice d’affaiblissement Rd en fonction de la frequence.
4.2 Transparence acoustique des plaques minces de dimensionsfinies
4.2.1 Formulation generale
Les vibrations forcees d’une plaque mince dans un fluide sont regies par l’equation de propagation
D∇4w(x, y)− ω2ρhw(x, y) = F (x, y) + p1(x, y, z = 0)− p2(x, y, z = 0), (4.27)
ou F (x, y) represente un terme source. Le deplacement w est recherche sous la forme du developpementmodal
w(x, y) =∑m,n
Amnψmn(x, y), (4.28)
ou, pour rappel, les fonctions propres ψmn(x, y) sont des fonctions orthogonales et normees, c’est-a-direverifiant la relation d’orthogonalite :∫ Lx
0
∫ Ly
0ψmn(x, y)ψpq(x, y) dx dy = δmpδnq. (4.29)
Il a ete vu au chapitre precedent que les champs de pression parietaux peuvent egalement etrerecherches sous la forme de developpements sur les fonctions propres
pm(x, y, z = 0) =∑p,q
B(m)pq ψpq(x, y), (4.30)
avecB(m)pq =
∫ Lx
0
∫ Ly
0pm(x, y, z = 0)ψpq(x, y) dx dy. (4.31)
Le report des developpements modaux du deplacement dans la plaque (4.28) et des champs de pressionsen z = 0 (4.30) dans l’equation de propagation (4.27) conduit a l’expression(
k4mp − k4
p
)Amp = Fmp −
2jωD
∑q,r
AqrZqrmp, (4.32)

4.2 Transparence acoustique des plaques minces de dimensions finies 29
avecFmp = 1
D
∫ Lx
0
∫ Ly
0F (x, y)ψmp(x, y) dx dy. (4.33)
En theorie, les developpements modaux utilises dans ce chapitre sont des sommes d’une infinite demodes de plaques. Neanmoins, en pratique ces series sont tronquees, car en fonction de la frequenceseul certains modes ont une influence non negligeable dans la description des vibrations de ce systemefluide-structure. Ainsi, l’equation (4.32) peut etre mise sous forme matricielle
∆A = F , (4.34)
avec∆qrmp =
(k4mp − k4
p
)δmqδpr + 2jω
DZqrmp, (4.35)
et dont les solutions ont pour expression
A = ∆−1F . (4.36)
La resolution de cette equation conduit a la determination des amplitudes des modes de vibrationsde la plaque qui dependent evidemment de la source d’excitation F . Neanmoins, pour les frequencesproches des resonances des modes le determinant de la matrice ∆qrmp tend vers 0 et le problemene peut plus etre resolu numeriquement. Une maniere de contourner ce probleme est de prendre encompte la viscoelasticite de la plaque dans la modelisation. En regime harmonique, cela se resume autiliser un module d’Yolung complexe donne par un modele de Kelvin-Voigt [7]
E = E + jωη, (4.37)
ou η est un terme de viscosite.Il est important de noter que dans le cas des fluides legers, en negligeant les termes de couplage
dans l’expression de l’impedance intermodale, les amplitudes des modes de la plaque sont directementdonnees par l’expression :
Amp = Fmp
k4mp − k4
p + 2jωD
Zmpmp
. (4.38)
4.2.2 Cas d’une excitation par une onde plane
La plaque etant de dimensions finies, l’interaction d’une onde plane incidente avec l’interface z = 0est plus difficile a modeliser que dans le cas d’une plaque infinie. Une bonne approximation de ce typed’excitation est de considerer le terme source F (x, y) comme etant la somme de la pression pi de l’ondeincidente et de la pression pr d’une onde reflechie a une paroi parfaitement rigide :
F (x, y) = pi(x, y, z = 0) + pr(x, y, z = 0) ≈ 2pi(x, y, z = 0). (4.39)
Le vecteur u = (sin θ cosϕ, sin θ sinϕ, cos θ) represente la direction de propagation de l’onde incidente.La pression acoustique harmonique associee a cette onde de nombre d’onde k0 = k0.u a pour expression
pi(x, y, z) = Ae−jk0(sin θ cosϕx+sin θ sinϕy+cos θz) (4.40)
et le terme source de l’equation de propagation peut alors etre mis sous la forme
F (x, y) = 2Ae−jk0(sin θ cosϕx+sin θ sinϕy). (4.41)

30 4 Transparence acoustique de plaques minces
La transparence acoustique de la paroi a pour expression
τ(ω, θ, ϕ) = PtPi, (4.42)
avecPt = ω2
2∑p,q
Rpqpq|Apq|2 = ω2
2∑p,q
Rpqpq|Apq|2. (4.43)
etPi = 1
2Z0cos θ|A|2S. (4.44)
On en deduit l’expression generale de la transparence acoustique :
τ(ω, θ, ϕ) = Z0ω2
cos θS∑m,p
Rmpmp
∣∣∣∣∣ FmpA∆mpmp
∣∣∣∣∣2
. (4.45)
Chapitre 5
Conclusion
Dans le cas du rayonnement acoustique des plaques minces de dimensions finies, il n’existe pasde modelisation analytique autre que dans le cas de plaques simplement appuyees sur les bords.Neanmoins, les calculs du rayonnement acoustique et de la transparence acoustique peuvent etremenes a bien en considerant le developpement modal du deplacement vertical de la plaque. Ainsi,pour un probleme donne de vibrations de plaques minces de dimensions finis dans un fluide leger, lesetapes cles de la modelisation sont les suivantes.
1. Determination des fonctions propres.Comme enonce precedemment, seul le cas des plaques simplement appuyees peut etre traitede maniere analytique et donc pour les cas differents (plaques encastrees, encastrees-libres,encastrees-appuyees, ...), les fonctions propres sont determinees de maniere numerique.
2. Calcul de l’impedance intermodale.Lorsque les fonctions propres sont connues, l’impedance intermodale Zmpqr doit etre calculeepar l’intermediaire de l’expression (3.38).
3. Calcul des facteurs de rayonnement des modes :A partir de l’impedance intermodale, le facteur de rayonnement de la plaque peut etredetermine par la relation (3.46), mais egalement les facteurs de rayonnement de chaque modepar la relation (3.47).
4. Calcul de la transparence acoustique de la plaque :Afin de calculer la transparence acoustique de la paroi, il est necessaire de calculer lesamplitudes des termes sources Fmp par l’intermediaire de l’equation (4.33), puis les amplitudesAmp des modes de la plaque par l’expression (4.38).
31

Bibliographie
[1] C. Lesueur, Rayonnement acoustique des structures, Editions Eyrolles, 1988.[2] A. Chaigne, Ondes acoustiques, Editions de l’Ecole Polytechnique, 2011.[3] R. Marchiano, Rayonnement acoustique des structures, 2011.[4] A. Chaigne et J. Kergomard, Acoustique des instruments de musique, Belin, 2013.[5] P.-O. Mattei, Cours de Vibroacoustique, 2007.[6] J.-C. Pascal, Vibroacoustique des structures planes, 2007.[7] R. Christensen, Theory of Viscoelasticity, Dover Publications Inc., 2nd edition, 2003.
33





























