Embed Size (px)
Citation preview
RETOUR TACTILE ET EXPLORATION
DE DONNÉES SCIENTIFIQUES
Xavier LepaulÉquipeI3D
GRAVIR / INRIA Rhô[email protected]
18 juin 2004
Table desmatières
Intr oduction 4
1 État de l’art 61.1 Périphériquestactiles . . . . . . . . . . . . . . . . . . . . . . . . 6
1.1.1 Retourthermique. . . . . . . . . . . . . . . . . . . . . . 61.1.2 Retourpneumatique . . . . . . . . . . . . . . . . . . . . 71.1.3 Matricesd’aiguilles. . . . . . . . . . . . . . . . . . . . . 81.1.4 Vibro-tactile . . . . . . . . . . . . . . . . . . . . . . . . 81.1.5 Retourelectrocutané. . . . . . . . . . . . . . . . . . . . 101.1.6 Systèmesàfluideselectro-rhéologiques. . . . . . . . . . 10
1.2 Utilisationsdu retourtactile. . . . . . . . . . . . . . . . . . . . . 111.2.1 Rendudesurface . . . . . . . . . . . . . . . . . . . . . . 111.2.2 Amélioration/remplacementd’un retourdeforce . . . . . 121.2.3 Applicationsdesparadigmes. . . . . . . . . . . . . . . . 12
1.3 Visualisation scientifiqueet retourhaptique . . . . . . . . . . . . 131.3.1 Visualisationpure. . . . . . . . . . . . . . . . . . . . . . 131.3.2 Exploration multi-sensorielle. . . . . . . . . . . . . . . . 15
2 Contexte 172.1 StringedHapticWorkbench. . . . . . . . . . . . . . . . . . . . . 172.2 Amira . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
3 Contrib ution 213.1 Problématique. . . . . . . . . . . . . . . . . . . . . . . . . . . . 213.2 Périphériquesenvisagés. . . . . . . . . . . . . . . . . . . . . . . 223.3 Paradigmesd’interaction . . . . . . . . . . . . . . . . . . . . . . 233.4 Modesd’exploration . . . . . . . . . . . . . . . . . . . . . . . . 23
3.4.1 Contraintesursurface . . . . . . . . . . . . . . . . . . . 243.4.2 Retourdedirection . . . . . . . . . . . . . . . . . . . . . 253.4.3 Exploration temporelle. . . . . . . . . . . . . . . . . . . 26
3.5 Configurationsdela main . . . . . . . . . . . . . . . . . . . . . . 28
1
Perspectiveset Conclusion 30
Bibliographie 32
2

Table desfigures
1.1 UnecelluledePeltier . . . . . . . . . . . . . . . . . . . . . . . . 71.2 Unematriced’aiguille (ForschungszentrumKarlsruhe) . . . . . . . . . 81.3 Le gantCyberTouch. . . . . . . . . . . . . . . . . . . . . . . . . 91.4 Localisationdescapteurs. . . . . . . . . . . . . . . . . . . . . . 91.5 Le principedu retourelectrocutané. . . . . . . . . . . . . . . . . 101.6 Le périphériqueréaliséparProvancher. . . . . . . . . . . . . . . 111.7 Tenseursreprésentéssousformedeboîtesrectangulaires . . . . . 141.8 Limitationdessolutions visuelles. . . . . . . . . . . . . . . . . . 15
2.1 Le WorkBench . . . . . . . . . . . . . . . . . . . . . . . . . . . 182.2 Le Spidarsurle Workbench. . . . . . . . . . . . . . . . . . . . . 192.3 L’interfaced’Amira . . . . . . . . . . . . . . . . . . . . . . . . . 20
3.1 Le vibreurélaboréà l’ INRIA . . . . . . . . . . . . . . . . . . . . 223.2 Un plandecoupedanslesdonnées(la boulecorrespondà la po-
sitiondela main) . . . . . . . . . . . . . . . . . . . . . . . . . . 243.3 Lesconfigurationsdeplacementdeplanet d’explorationcontrainte 253.4 La configurationpourle retourdedirection . . . . . . . . . . . . 253.5 La configurationd’explorationtemporelle . . . . . . . . . . . . . 273.6 L’interfaced’explorationtemporelle . . . . . . . . . . . . . . . . 273.7 Le trackerPolhemusfixé surle gant . . . . . . . . . . . . . . . . 28
3
Intr oduction
Lescodesdecalculscientifiquesontdeplusenplusperformantset permettentle traitementet la générationde donnéescomplexes et volumineuses.D’impor-tantsvolumesde donnéessontaussiissusde capteurs(sondes,satellitesmétéo,. . .), dont lesrésolutionstemporelleset spatialessontdeplusenplusfines,et lesdimensionsélevées.La visualisation scientifiqueintervientenaval decescalculsoudecesrelevés,pourpermettrel’analyseet la compréhensiondedonnées.
Cettevisualisationestsouvent réaliséesurstationde travail avec affichageendeuxdimensions.Mais cesaffichagesnesontpasadaptésà l’explorationdedon-nées3D. De réelsprogrèsdansla capacitéà appréhendercetypededonnéesontétéréalisésgrâceà la réalitévirtuelle [22], progrèsréalisésgrâceà l’améliorationdesaffichage,maisaussil’exploitationdenosautressens.
La réalité virtuelle est un domainede recherchetrès large, cherchantà tirerparti de tousnossenspour résoudrele paradoxe poséparsonnom: donneruneillusion deréalitédansunenvironnementvirtuel. Parmi lesbénéficesdela réalitévirtuelle,on peutciter : unevision stéréoscopique,despossibilités d’interactionsmulti-sensorielles directes(superposition de l’espaceréel et de l’espacevirtuel)qui permettentuneimmersionpropiceà la compréhensionrecherchée.
Parmilesdifférentsretourssensorielsenvisageablespourinteragiravecunmondevirtuel, lesaspectsvisuelset sonoressontrelativementbienconnuset maîtrisés.D’un autrecôté, la stimulation d’autressenstels le goût ou l’odorat en esten-coreauxrecherchespréliminaires.Ainsi, l’exploitationdu retourhaptiqueappa-raît commeunevoiederechercheintéressante.
Le retourhaptiquesediviseendeuxcatégoriesquesontle retourd’effort (ouretourkinesthésique)et le retourtactile.La majoritédestravauxexistantssesontconcentréssurle retourd’effort.
Le retourtactile,grâceà la communicationd’informationsdetoucher, permetd’exploiterdescanauxsensorielssupplémentaire.Deplus,lespériphériquesexis-tantssontsouvent moinsencombrantsetmoinschers,mêmesi leursperformancessontencorelimitées.
4
L’objectif de ce projet est à mi-chemindesdeux domainesd’activités cités,la visualisation scientifiqueet l’haptique tactile. Nous avons cherchéà définiret mettreen placedesparadigmesd’interactiontactile avec desdonnéesscien-tifiques,afind’enaméliorerl’exploitation.
Dansunepremièrepartie,ce rapportdresseraun étatde l’art du retourtactileet de la visualisationscientifique.Aprèsunedescriptiondesoutils utiliséspourla réalisationdece stage,nousaborderonsplusprécisémentlescontributionsaudomainedela visualisationscientifiqueproposéesdansle cadredecestage.
5
Chapitr e 1
État de l’art
Cetétatdel’art sediviseentroisparties,qui correspondentauxtroisaspectsdela rechercheeffectuéelors deceprojet.La premièrepartieconcernelespériphé-riques,qui sontlesélémentsdéterminantsdel’interaction,puisqu’ils déterminentquellessensations tactilespourrontêtrerendueset leslimitesdecerendu.
Dansunedeuxièmepartie,nousnousintéresseronsauxapplications existantesdu retourtactile.
Enfin,la troisièmepartieprésentele domainedela visualisation scientifique,enparticulierles techniquesdéveloppéesdanscedomaine,techniquesqui ont servidebaseà la reflexion engagéesurle sujetdeceprojet.
1.1 Périphériques tactiles
Le retourde force est le moded’interactionprivilégié despériphériqueshap-tiquesà l’heureactuelle.Cependant,denombreuxpériphériquesderetourtactileontétédéveloppés,exploitantdiversmodesd’interactionavecl’utilisateur [18].
1.1.1 Retour thermique
Unestimulation thermiquede la peaupeutêtreréaliséegrâceà desradiations(infra-rougesoumicro-ondes),parconvection(d’air oudeliquide)ouparconduc-tion (pompesàchaleurthermo-électriques).
La plupartdespériphériquesdéveloppéssontà basedecellulesà effet Peltier(CEP)(fig. 1.1),qui permettentun contrôleefficacedela température,aussibienen réchauffementqu’en refroidissement.A titre d’exemple, lesperformancesdugant haptiquede l’Uni versité Salford [2] sont de l’ordre de 20 ˚C/secdanslagammedetempérature-5/+50˚C.
6
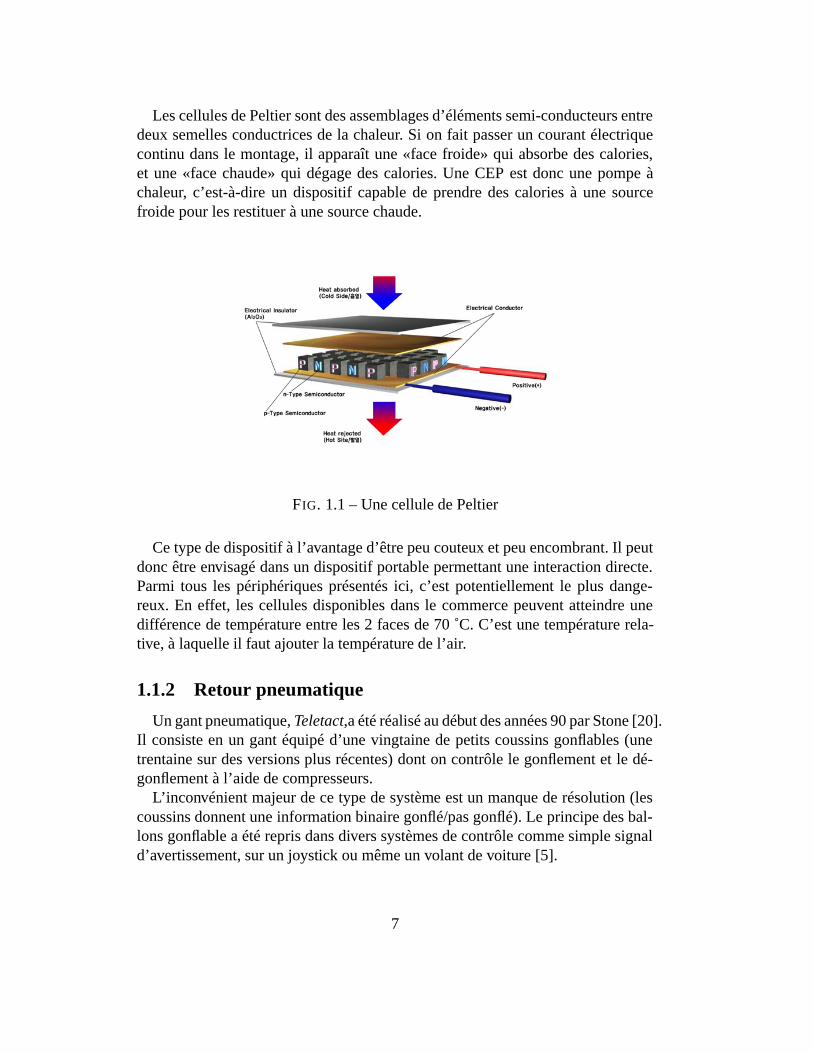
LescellulesdePeltiersontdesassemblagesd’élémentssemi-conducteursentredeuxsemellesconductricesde la chaleur. Si on fait passerun courantélectriquecontinudansle montage,il apparaîtune«facefroide» qui absorbedescalories,et une«facechaude»qui dégagedescalories.Une CEP estdoncunepompeàchaleur, c’est-à-direun dispositif capablede prendredescaloriesà une sourcefroidepourlesrestitueràunesourcechaude.
FIG. 1.1– UnecelluledePeltier
Cetypededispositif à l’avantaged’êtrepeucouteuxetpeuencombrant.Il peutdoncêtreenvisagédansun dispositif portablepermettantuneinteractiondirecte.Parmi tous les périphériquesprésentésici, c’est potentiellement le plus dange-reux. En effet, les cellulesdisponibles dansle commercepeuvent atteindreunedifférencedetempératureentreles2 facesde70 ˚C. C’estunetempératurerela-tive,à laquelleil fautajouterla températuredel’air.
1.1.2 Retour pneumatique
Ungantpneumatique,Teletact,aétéréaliséaudébutdesannées90parStone[20].Il consisteen un gantéquipéd’une vingtainede petitscoussinsgonflables(unetrentainesurdesversionsplus récentes)donton contrôlele gonflementet le dé-gonflementà l’aide decompresseurs.
L’inconvénientmajeurdece typedesystème estun manquederésolution (lescoussinsdonnentuneinformationbinairegonflé/pasgonflé).Le principedesbal-lonsgonflablea étéreprisdansdiverssystèmesdecontrôlecommesimplesignald’avertissement,surun joystick oumêmeunvolantdevoiture [5].
7

1.1.3 Matrices d’aiguill es
Il existeplusieursmisesenœuvredesmatricesd’aiguilles[9, 10]. Le principecommunestd’avoir unezonerempliedepetitesaiguillesquel’on peutactionnerorthogonalementaudoigt,à l’image dessystèmesdelecturedu braille (fig. 1.2).Certainssystèmesutilisentuneligned’aiguillesquel’on peutdéplacerle longdudoigt.
FIG. 1.2– Unematriced’aiguille (ForschungszentrumKarlsruhe)
Cessystèmespermettentuned’obtenir résolutionfine du stimulus,autorisantun rendutactile précis.Leur inconvénientmajeurest l’encombrement.En effet,cessolutions requièrentun moteurpour chaqueaiguille, et le système résultantestrarementportable,mêmedansle casoù lesmoteurssontéloignésdesaiguilles(transmission dudéplacementpardescables).Cetinconvénientinterdituneinter-actiondirecte.
1.1.4 Vibr o-tactile
Lessystèmesàbasedevibreurssontlesplusrépandus,sansdouteparcequ’ilssontlesplusfacilesàmettreenœuvre.Despetitsvibreurssontplacésàdifférentsendroitssur la mainde l’util isateur(le boutdesdoigts,la paume,. . .) et peuventêtrecontrôlésenamplitudeet/oufréquence.
Parmi les périphériquesexistants, le CyberTouch (fig. 1.3) est un gantcom-mercialiséparla sociétéImmersion1. Il réunideuxfonctions: gantdedonnéesetpériphériquetactileàvibreurs.
Pourla partiegantdedonnées,il estéquipéde18capteurs,placéssurlesprin-cipalesarticulationsde la main (fig. 1.4). Pourchaquedoigt saufle pouce,on a2 capteurssurlesdeuxpremièresarticulations(*MPJ et *PIJ). Il existeun ganta22 capteurs,qui rajouteles4 capteursdesarticulationsterminales.On a ensuite4 capteurs,placésentrelesdoigts, et mesurantl’angle entreceux-ci(tA, mA, rAet pA). Le pouceestéquipéde3 capteurs: deuxpour lesarticulations du poucemême(tMPJet tIJ), et un pour la rotationdu pouceautourde la paume(TMJ).Il
1http ://www.immersion.com
8

FIG. 1.3– Le gantCyberTouch
restedonc3 capteurspour la paume.Deuxdétectentlesrotationsdu poignet(wpet wy), et le dernierla flexion propredela paume(pMPJ).
FIG. 1.4– Localisationdescapteurs
Poursapartiegantderetourtactile, le cyberTouchestéquipéde6 vibreurs,5placésau-dessusdechaquedoigtet undansle creuxdela paume.
9
1.1.5 Retour electrocutané
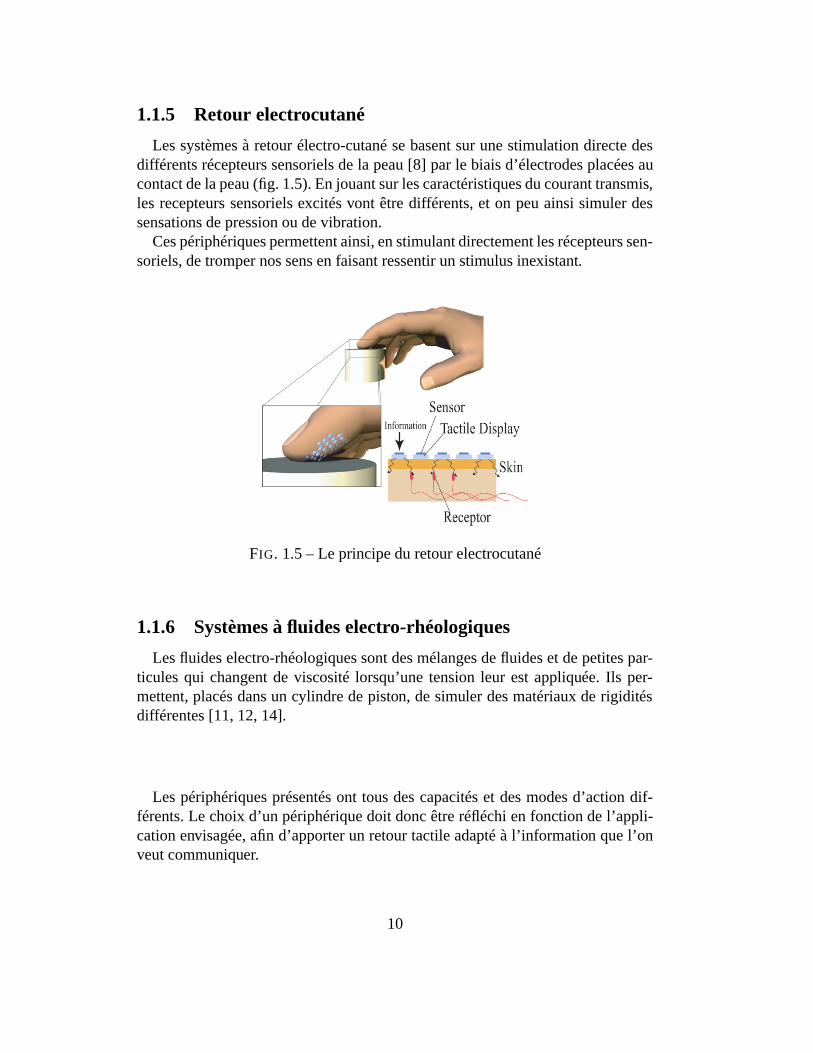
Lessystèmesà retourélectro-cutanésebasentsurunestimulationdirectedesdifférentsrécepteurssensorielsdela peau[8] par le biaisd’électrodesplacéesaucontactdela peau(fig. 1.5).Enjouantsurlescaractéristiquesducouranttransmis,les recepteurssensorielsexcitésvont êtredifférents,et on peuainsi simulerdessensationsdepressionoudevibration.
Cespériphériquespermettentainsi,enstimulantdirectementlesrécepteurssen-soriels,detrompernossensenfaisantressentirunstimulusinexistant.
FIG. 1.5– Le principedu retourelectrocutané
1.1.6 Systèmesà fluideselectro-rhéologiques
Lesfluideselectro-rhéologiquessontdesmélangesdefluideset depetitespar-ticulesqui changentde viscositélorsqu’unetensionleur estappliquée. Ils per-mettent,placésdansun cylindre depiston, desimuler desmatériauxde rigiditésdifférentes[11, 12,14].
Les périphériquesprésentésont tousdescapacitéset desmodesd’action dif-férents.Le choix d’un périphériquedoit doncêtreréfléchienfonctiondel’appli-cationenvisagée,afin d’apporterun retourtactileadaptéà l’information quel’onveutcommuniquer.
10
1.2 Utilisat ions du retour tactile
Le retour tactile est un domainede rechercherelativement jeune,de part larelative raretédespériphériques,et ausside part les difficultésrencontréespourreproduiredessensationstactiles.Si cecanalsensorielaétépeuexploitédansuncadredevisualisationscientifique,denombreusesapplicationsdansdesdomainesdiversontutiliséle retourtactile.La plupartdecestravauxs’attachentàreproduiredessensationsprochesdu réel.
Nousprésentonsici quelquesunesdecesapplications,parmilesplusreprésen-tativesdel’état desrecherchessurle retourtactile.
1.2.1 Rendu desurface
L’utili sationla plusnaturelleduretourtactileestsansdoutele rendudesurface.C’esteneffet la sensationtactilela pluscommune.En touchantunesurface,nousla reconnaissonsgrâceàcertainespropriétés(rugosité,formelocale,température)quel’on peutchercherà reproduire.
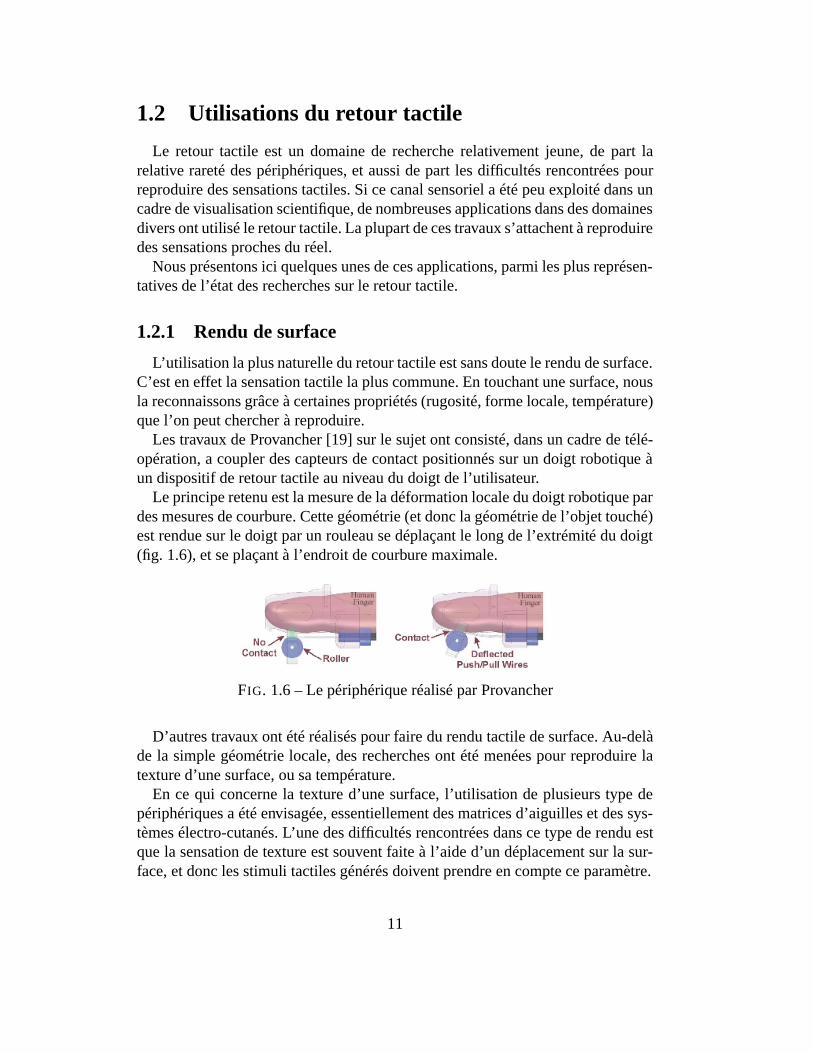
LestravauxdeProvancher[19] surle sujetont consisté,dansun cadredetélé-opération,a couplerdescapteursdecontactpositionnéssurun doigt robotique àundispositif deretourtactileauniveaududoigtdel’util isateur.
Le principeretenuestla mesuredela déformationlocaledudoigtrobotiquepardesmesuresdecourbure.Cettegéométrie(etdoncla géométriedel’objet touché)estrenduesurle doigtparun rouleausedéplaçantle longdel’extrémité dudoigt(fig. 1.6),et seplaçantà l’endroit decourburemaximale.
FIG. 1.6– Le périphériqueréaliséparProvancher
D’autrestravauxontétéréaliséspourfairedurendutactiledesurface.Au-delàde la simple géométrielocale,desrecherchesont étémenéespour reproduirelatextured’unesurface,ousatempérature.
En ce qui concernela texture d’une surface,l’utilisation de plusieurstype depériphériquesaétéenvisagée,essentiellementdesmatricesd’aiguilleset dessys-tèmesélectro-cutanés.L’une desdifficultésrencontréesdanscetypederenduestquela sensationdetextureestsouventfaiteà l’aide d’un déplacementsur la sur-face,et donclesstimuli tactilesgénérésdoivent prendreencompteceparamètre.
11
1.2.2 Amélioration/r emplacementd’un retour de force
Le retourtactile(enparticulierparvibration)peutêtreutilisépouraméliorerlessensationsrenduesvia undispositif àretourdeforce,enparticulierlorsducontactavecunesurfacesolide (non-déformable).
Eneffet,si lespériphériquesderetourdeforcepermettentd’«arrêter»lemouve-mentdel’utili sateur, ils nedonnentpasnécessairementunesensationdecontact.L’adjonctiond’un retourtactilepermetdedonnerplusderéalismeà la simulationde contact.Le stimulus tactile serapar exemple unevibration,étantdonnéquelors d’un chocavecunesurface,desvibrationssontcréées.
Avecdesdispositifs classiquesde retourde force, lessurfacesduressontren-dues,pour desquestionsde stabilité,en plaçantun ressortet un amortissementvirtuelsentrela surfacedel’objet et la main,cequi donneunesensationd’elasti-cité.
Destravaux[15,16] ontpermisdeconstruiredesmodèlesdesvibrationsreçueslors ducontactavecdifférentessurfaces,dansle casparticulierdetapotementsurla surface.Les vibrations fourniespar le modèle,en addition avec un retourdeforceclassique,améliorentla sensationd’un contact«dur»surunesurface.
Enraisond’unemiseenplaceplussimpleetmoinschère,le retourvibro-tactilepeutaussiêtreutilisépourremplacertotalementunretourdeforce.Desétudes[3,13] ont montré,dansun cadrede manipulation d’objets virtuels, que le retourtactile(accompagnéd’un retourauditif),permettait,souscertainesconditions, uneinteractioncomparableenefficacitéavecun retourdeforce.
Mais on s’éloignedèslors d’une tentative de reproductionfidèle du réel. Lesignaltactileestdanscecasune«alarme»qui prévientducontactvirtuel.
1.2.3 Applicationsdesparadigmes
Les travauxprésentésci-dessuspourraientêtrequalifiésd’util isations«debasniveau»despériphériquesderetourtactile,dansle sensoùcesontdesrecherchesmenéespourtenterdereproduiredessensationsréelles,maishorsd’un cadreap-plicatif. Lestravauxsuivantssontd’uneautrenature.La reflexion surl’utili sationdu retourtactileaétémenéeenpartantdel’application, desutilisateursfinaux.
Ainsi, desdispositifs effectuentunetransformationvisuel-tactile [8] pour, parexemple,un rendubraille à partir d’un imprimé ou pour «toucher»desimages.Celapeutpermettreàdespersonnesdéficientesvisuellesd’avoir accèsàungrandnombrededocumentssansavoir à lesadapterà leurhandicap.
Desaugmentationsde stimuli tactilesont aussiétéenvisagés,pour permettred’étendrevirtuellementnoscapacitéssensoriellespropres,enfaisantressentirdeschosesqui sontcaptéesà uneéchelleinaccessiblesànossens,pourpermettrepar
12
exemplela vérificationde qualitéde produit, domainedanslequel l’homme nepeuxpastoujoursressentirdesdéfautsassezfinset la machinen’a pasla capacitédejugementnécessaireà la tâche.
Unedernierexempleestl’utilis ationdu tactilecommealarme,parexempleauniveaud’un volantdevoiture[5], ouunretourtactilepeutvenirenremplacementdesclassiquesvoyants,qui n’attirentpasforcémentl’attention duconducteur.
Lespériphériquestactilestrouvent doncdenombreusesapplications,dansdesdomainestrèsdivers.Leur utilisationdansun cadrede visualisationscientifiquea ététrèspeuexplorée,et c’estpourquoiil nousa sembléintéressantd’effectuerdesrecherchesdanscettedirection.
1.3 Visualisation scientifique et retour haptique
Ceprojetavait pourbut d’amenerl’utili sationderetourtactiledansle domaineparticulierdela visualisation scientifique,le terme«visualisation»étantalorsprisausenslarge,puisquele canalvisueln’estplusle seulexploité.
Une condition nécessaireà la mise en place de paradigmesadaptésà cetteexplorationde donnéesest la compréhensiondesproblématiquesauxquelssontconfrontéslesgensdumétier, ainsiquel’analysedessolutionsexistantes.
Voici doncquelquesélémentspermettantd’introduirela réflexion qui vasuivresurl’exploration tactilededonnéesscientifiques.
1.3.1 Visualisationpure
Commesonnoml’indique, la basedu domaine dela visualisationscientifiqueestuneexploration visuelledesdonnées.Cettereprésentationestsouvent richeeninformation. De nombreusessolutionssontdisponiblespour l’exploitation vi-suellededonnéesoudeproblèmesscientifiques[6].
Il y aprincipalementtroistypesdedonnéesauxquellessontconfrontéslesutili-sateursdesystèmedevisualisationscientifique: leschampsdescalaires,donnéesà unedimension, leschampsdevecteurset lestenseurs,quel’on peutdécrirera-pidementcommedeschampsd’opérateurssurdesvecteurs,qui sontdesdonnéesdedimensions supérieuresà3.
Pour un champde scalaires,on peut principalementutiliser un renduvolu-mique,ouuncalculd’iso-surface.Le renduvolumiqueconsisteàattribueràchaquepoint desdonnéesune valeur de transparence,l’image résultanteétantun vo-lume plus opaquedansles zonesde forte valeursdu scalaire.Les iso-surfaces
13
permettentdevisualiserla répartitiond’unevaleurdonnéesduscalairedansl’es-pacedesdonnées.On peutaussienvisagerl’explorationd’un champde ce typepar le placementd’un plan decoupedansles données,plande coupesur lequellesvaleursserontreprésentéesenniveauxdegris,ouselonunetabledecouleurs.
Pourles champsde vecteurs,donnéestri-dimensionnelles,plusieurssolutionssontenvisageables.La premièreestdereprésenterla valeurduchampauxnoeudsd’unegrille sousformedeflèchesdontla taille etl’orientationindiquela valeurduchamp.Mais celaposedesproblèmespourdeschampscomplexes,pourlesquelson peutpasserà côtéde variationslocalesimportantessi ellessetrouvententredesnœudsdela grille. Onpeutrésoudrecesproblèmesparunegrille à résolutionnon-uniforme.On peutaussireprésentercestypesde champà l’aide de lignes.Ceslignespeuventavoir dessensdifférents.Ellespeuventêtreissud’un «lachédeparticules»dansle champ,chaquelignereprésentantunedestrajectoires(path-line). Ellespeuventêtreaussidéfiniesplusmathématiquementcommedeslignesétantenchaquepoint tangenteauvecteur(streamline).
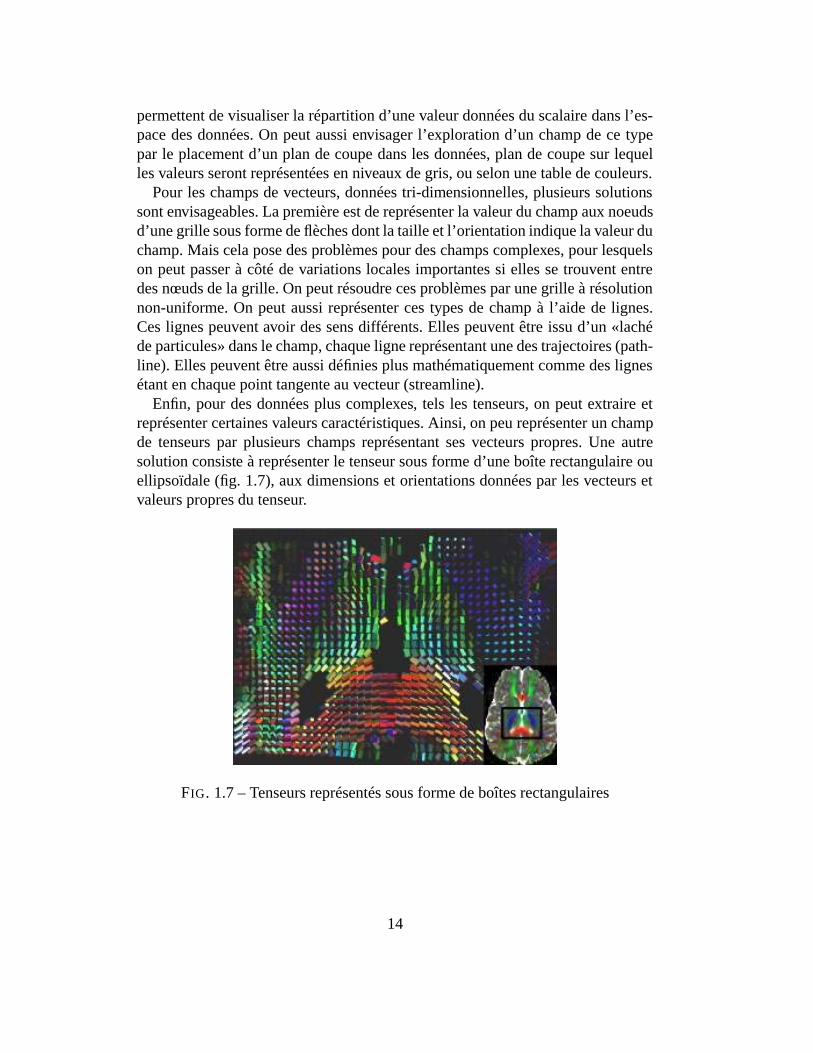
Enfin, pour desdonnéesplus complexes, tels les tenseurs,on peutextraire etreprésentercertainesvaleurscaractéristiques.Ainsi, onpeureprésenterunchampde tenseurspar plusieurschampsreprésentantsesvecteurspropres.Une autresolutionconsiste à représenterle tenseursousformed’uneboîterectangulaireouellipsoïdale(fig. 1.7),auxdimensionset orientationsdonnéespar lesvecteursetvaleurspropresdu tenseur.
FIG. 1.7– Tenseursreprésentéssousformedeboîtesrectangulaires
14
1.3.2 Exploration multi-sensorielle
Lors de l’exploration de donnéestrèscomplexes,l’espacevisuelpeutdevenirencombrépardetropnombreusesinformations(fig. 1.8),notammentsi le nombrededimensionsdesdonnéesestgrand.Dèslors,onperdl’intérêt dela visualisationqui estdepermettreunmeilleurecompréhension desdonnées.
FIG. 1.8– Limitationdessolutionsvisuelles
De plus,si le canalvisuel estefficacepour appréhenderla globalité desdon-nées,il estmaladaptéàuneexplorationpluslocale,qui peutêtrenécessairedanscertainestâches,commeparexemplela rechercheprécised’un extremumlocal.
C’est pour cesraisonsque l’on chercheà utiliser d’autrescanauxsensorielspour l’exploration dedonnées.En effet, l’exploitationdecescanauxpermetà lafois desoulagerle canalvisuelet deproposerdenouvellesmanièresd’appréhen-derlesdonnées.
Le retourhaptiqueestunedecessolutionsalternativesqui sontexploréesdansle cadrede la visualisationscientifique.Parmi les travaux les plus connusdanscedomaine,on peutciter le VisualHapticWorkbench[1], qui serapprochedelaconfigurationWorkbench& Spidarà notredisposition. Il s’agit d’un Workbenchà écranuniquehorizontal,au-dessusduquelestplacéun PHANToM . Il permetuncouplagevisuel/haptiqueeninteractiondirecte.
D’autresréalisationsutilisentle PHANToM, commel’applicationdeDurbeck[4]qui couplele PHANToM àunaffichage2dsurstationdetravail, pourl’explorationdechampsdevecteurs.
De nombreusestechniquesd’exploration haptiquespar retour de force sontconnues[17]. On peut,pour cestechniques,reprendrela classificationutilisée
15
pourla visualisationpure.Pourla représentationdechampscalaires,onpeutciter la créationd’un champ
depseudo-gravité, attribuantà chaquepoint del’espaceun poidsproportionnel àla valeurdu champencepoint. Le retourde forceassociéentraineainsi la mainde l’util isateurversles zonesde forte densité.Une autresolution, quel’on peutrapprocherde la solutionvisuelle du renduvolumique,consisteà interpréterlesvaleursduchampcommedesvaleursdeviscosité,lamainayantainsiplusdediffi-cultéàsedéplacerdansleszonesdefortesvaleurs.Unedernièresolutionexploiteunplandecoupe,autourduquellessvaleurssonreprésentéesentantquehauteur.Celapermet,comparéauxplansdecoupevisuels,d’éviter leserreursd’interpré-tation quepeuvent créerles tablesde couleursdanslesquellesla discriminationdesgrandeset petitesvaleurspeutnepasêtreaisée.
Pourun champde vecteurs,l’interaction la plus évidenteestd’appliqueruneforce de valeurproportionnelle au champ,et dansla directionde celui-ci. Uneautresolution estdelaisserle mouvemententranslationlibre, etdeforcerle péri-phériqueàs’orienterdansla directionduchamp.Onpeutaussicréeruneviscositévirtuelles’opposantaudéplacementtransversauxàladirectionduchamp.Lamainestalorslibre desedéplacerle longdu champ,et horsdel’opposition auxforcesappliquées,la main«dessine»unelignedecourant.
Commeonapule voir, touteunecollectiondesolutionsexistepourexplorerlesdonnées,tantdemanièrepurementvisuellequegrâceà du retourde force.Maisla complexité desdonnéesestsanscessecroissante,et toutescestechniquesseheurtentà desproblèmesdesurcharge du canalsensorielutilisé. C’estpourquoil’utilisation d’autrescanauxpeutpermettrede mieux appréhenderdesdonnéespluscomplexes.
16
Chapitr e 2
Contexte
Dansle domaineparticulierdel’haptique,le matérielàunrôlecentral.Eneffet,si leslimitationsdespériphériquessontunobstacletechniqueà certainsdévelop-pement,la reflexion menéesur les techniqueset métaphoresd’interactionss’ap-puiesurlescaractéristiquespropresdesdifférentspériphériqueset estinfluencéeparcelles-ci.
2.1 Stringed Haptic Workbench
L’équipe I3D est équipéed’un dispositif uniquecouplantun plan de travailvirtuel (le «Workbench»)et un Spidar, qui estun systèmeà retourd’effort. Cetensembleformele «StringedHapticWorkBench».
Le Plan de Travail Virtuel (fig. 2.1) est une solution de visualisationà basede projectionsur grandsécrans.Il estmuni de deuxécransperpendiculaires,unhorizontalet unvertical.
L’installation estmunie d’un système actif de vision stéréoscopique.Ce sys-tèmeutilisedeslunettesqui permettentdemasqueralternativementchaqueœil àl’aide deverresencristauxliquides.Cemasquageestsynchroniséavecl’affichagesur les écrans,qui fournissentdoncsuccessivementuneimagepour chaqueœil,cecipermettantdereconstruirel’image tri-dimensionnelle.
De plus,les lunettessontéquipéesd’un systèmeélectromagnétiqued’enregis-trementdesmouvements,qui permetde calculeruneimagedépendantdu pointdevuedel’utilisateur. Ainsi, si l’on sedéplaceautourdel’objet visualisé,celui-ciresteau mêmeendroit.Ceci permetuneinteractiondirecte,c’est-à-direunesu-perpositionconstantedel’espacevirtuel et del’espaceréel.
Le Spidar[21] estundispositif deretourdeforceàbasedefils. Danssaversion
17

FIG. 2.1– Le WorkBench
à trois degrésde liberté,on disposede 4 fils attachésà desmoteursaux 4 coinsd’un tetraèdreet qui se regroupenttous sur une baguedanslaquelleon glissesondoigt. Celapermetd’avoir un retourde force en position (ainsi qu’un suividesmouvements,grâceà unemesuredela longueurdesfils) dansle tétraèdrededimensionvariabledélimitéparla positiondesmoteurs(onaugmentel’espacedetravail simplementenéloignantlesmoteurs).
Une versionà six degrésde liberté du spidarexiste,permettantde donnerunretourdeforceà la fois entranslationet enrotation.
2.2 Amira
Amira estun logiciel devisualisationscientifiquecommercialiséparTGS1.Initialementdéveloppé pour la visualisationsur stationde travail classique,
Amira aensuiteévoluépourprendreencomptedesenvironnementsimmersifs.Cetteévolution explique que l’interfaced’Amira est une interfaceclassique
de logiciel de station de travail, où l’interaction sefait par le biais de menusetde widgetsclassiques.Le fonctionnementd’Amira est à basede modules quel’on connecteaux donnéesdésiréespour accéderaux différentestechniquesde
1http ://www.tgs.com
18
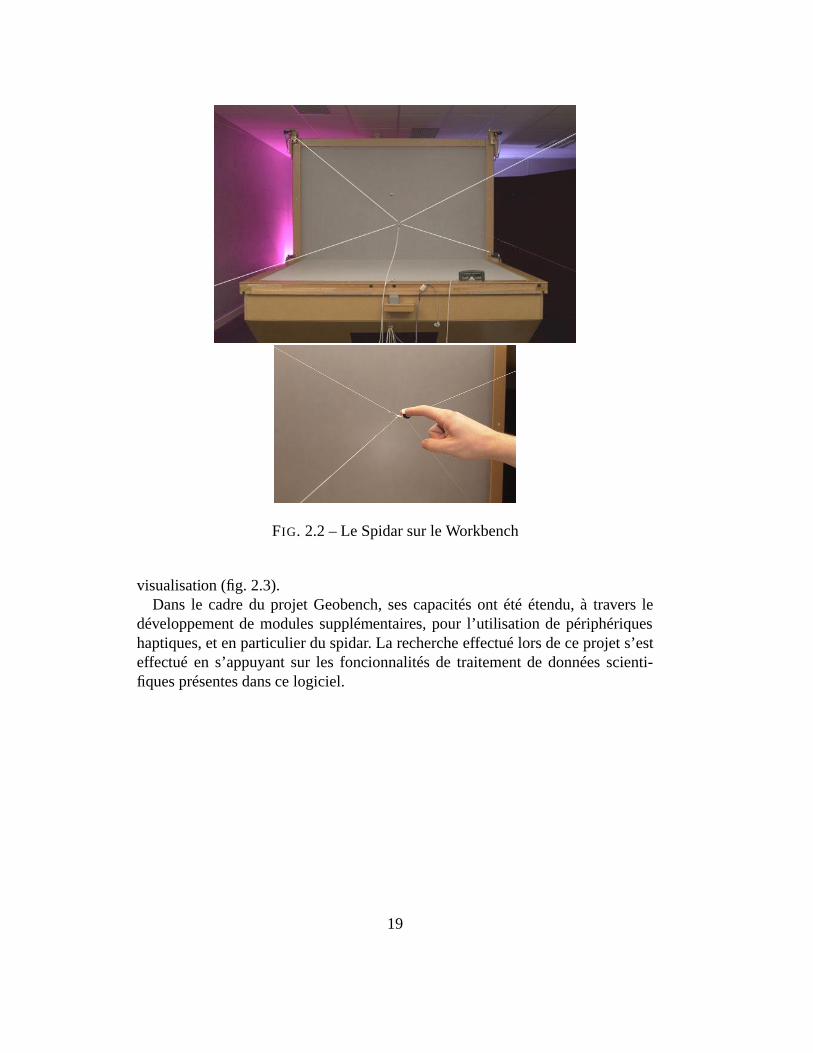
FIG. 2.2– Le Spidarsurle Workbench
visualisation (fig. 2.3).Dansle cadredu projet Geobench,sescapacitésont été étendu,à travers le
développementde modules supplémentaires,pour l’util isationde périphériqueshaptiques,et enparticulierduspidar. La rechercheeffectuélors deceprojets’esteffectuéen s’appuyantsur les foncionnalitésde traitementde donnéesscienti-fiquesprésentesdanscelogiciel.
19
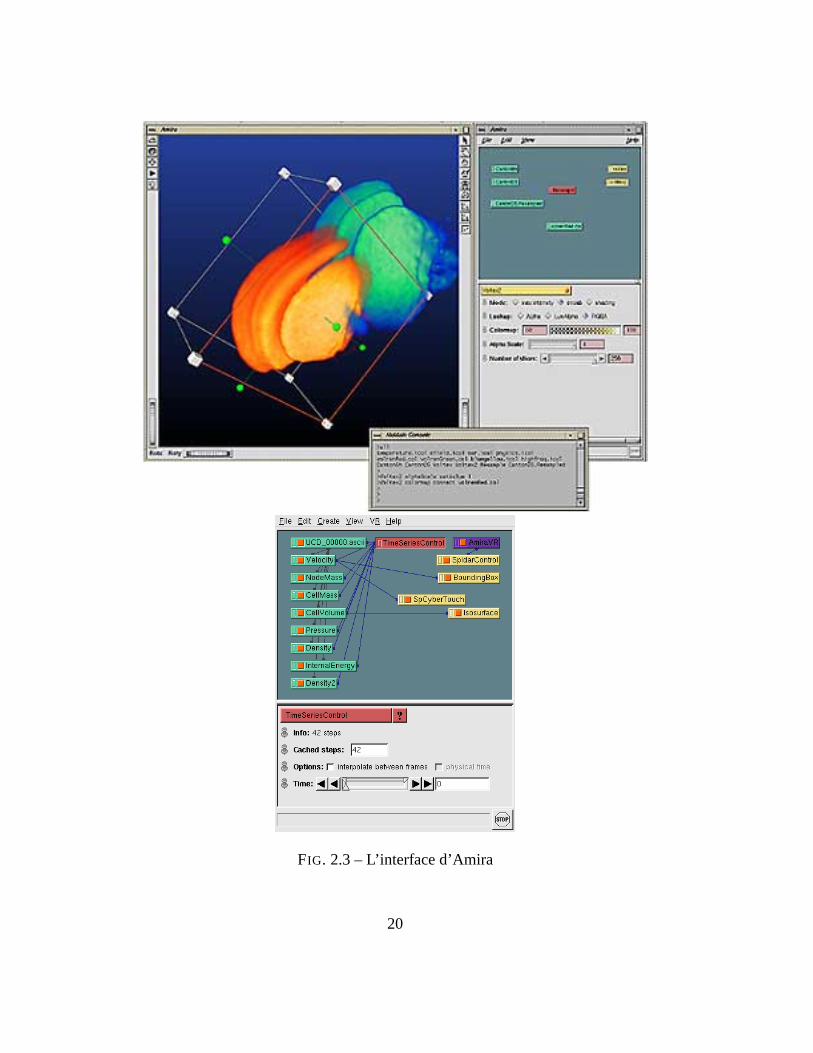
FIG. 2.3– L’interfaced’Amira
20
Chapitr e 3
Contrib ution
Ce projet s’inscrit dansle projet RNTL Geobench,en collaborationavec leBRGM (Bureaude RecherchesGéologiqueset Minières),le CEA (Commissa-riat à l’Energie Atomique), le LIFO (Laboratoired’InformatiqueFondamentaled’Orléans)et TGS.Pourl’interactiontactile,nousavonsprincipalementtravailléavecle CEA, autantencequi concernelesdonnéesexploitéesquepour le retourutilisateursurlestechniquesdéveloppées.
3.1 Problématique
Commenousl’avonsvu dansla premièrepartie,le domainedela visualisationscientifiqueà desbesoinsentermedetechniquesd’explorationdesdonnéespourpallierauxproblèmesdesurchargedescanauxsensorielsutilisés.
L’idéededépartétaitdoncdefourniruneinteractionavecdesdonnées(géo)scientifiques,interactiondanslaquellele retourd’information àl’utili sateurseraitdenaturetac-tile, pours’ajouterauxautresaspectsdéjàprésents(retoursvisuelset retoursdeforce).
Un autreproblèmeabordéestcelui desinterfacesdecontrôledanslesenviron-nementsvirtuels.Commenousl’avonsvu, Amira, commela plupartdeslogicielsde visualisation scientifique,offre une interfacetypiquede logiciels «2D». Cesinterfacessontmaladaptéesauxenvironnementsimmersifs,neserai-cequeparcequ’ils forcentl’utilisateurà«sortir»del’environnementpourrevenirauxpériphé-riquesclassiquesquesontle clavier et la souris.
Il devient doncévidentqu’il y a unenécessitéde développerdestechniquespermettantd’agir surlesdonnéesenrestantdansl’environnementvirtuel.
Lesrechercheseffectuéesdansceprojetsesontdoncconcentréessurcesdeux
21

aspects: retourtactileetcontrôledirectdesdonnées.La solution envisagéeestdecouplersuruneseulemainunsystèmedecontrôledesdonnéesetunpériphériquederetourtactile.Ainsi, lesdeuxfonctionsnécessairesà l’exploration desdonnéespeuventsefaireenun mêmelieu, et engardantunemaindelibre, cequi permetéventuellementd’ajouterd’autresmoyensd’explorations.
3.2 Périphériques envisagés
Lorsdesrecherchespréliminairesaudéveloppementdesparadigmesd’interac-tion, nousavonsenvisagél’utilis ationdeplusieurspériphériques.
Nousavions la possibilité d’utiliser un systèmematriciel vibro-tactile, déve-loppéeauCEA. Mais cepériphériqueimposait d’êtrefixe. Celaimpliquait doncà la fois la mobilisationdesdeuxmains(unepour l’exploration,l’autre pour leressenti)et,conséquencedela premièrecondition,uneinteractionindirecte,étantdonnéquela sensationcorrespondantà la position d’unemainseraitdéportéesurl’autremain.
Ledeuxièmepériphériquedisponibleétaitunvibreurélaboréàl’ INRIA (fig. 3.1). Il s’agitd’unepetiteplaquevibrantepouvant êtreplacéeauboutd’un doigt,donton contrôlel’amplitudedesvibrations(sur6 niveauxdiscrets).C’estun périphé-rique léger(quelquesgrammes)et portable,qui a déjàétéutilisé pouruneamé-liorationdesensationdecontact,encouplageavecle retourdeforcedonnéparlespidar. Mais sesperformancessontassezfaibles,surtoutenmatièrederésolutiondustimulus.
FIG. 3.1– Le vibreurélaboréà l’ INRIA
Le troisième périphériqueestcelui qui a étéutilisé pour le projet. Il s’agit duCyberTouch(voir 1.1.4pourla descriptionduCyberTouch).
22
Les caractéristiquesde ce périphérique(à la fois gantde donnéeset gantderetourtactile)permettentd’effectueruneinteractiondirecteaveclesdonnées,cetteinteractions’effectuantà une main, permettantainsi de garderl’autre main etd’autrescanauxsensoriels(visuels,auditifs, . . .) libres,cequi correspondbienàla problématiqueduprojet.
3.3 Paradigmesd’interaction
Suiteà desdiscussionsaveclespartenairesdu projet,nousavonscernélesbe-soinsenmatièred’exploration desdonnées,et partantde là, nousavonsimaginéet développé les paradigmesd’interactioncorrespondants,en exploitant les pro-priétésdupériphérique.
Les besoinspremiersqui ont étéexprimésconcernaientl’explorationtempo-relle dedonnéesfournissantplusieurspasdetemps,avec l’observation conjointed’un pointd’intérêtprédeterminéetfixe.Ils nousestégalementapparuquel’util i-sationdeplansdecoupeétaienttrèsrépandue,surtoutdansle cadred’explorationdedonnéesscalaires.Enfin,il asemblépertinentd’essayerd’imaginerdesmoyensd’explorerdesdonnéesvectoriellesavecunpériphériquetactile.
Les interactionssebasentsur la navigation entreplusieursmodesd’explora-tion, navigationcontrôléepardifférentesconfigurationdela main.On prendraicil’expression«configurationdela main»dansle sensd’uneposturedela maindes-criptible en quelquesmots.Par exemple,les configurationsexploitéessont: «lepoingfermé»,«l’index tendu»,«touslesdoigtsécartés».
L’utili sationde cesdifférentesconfigurationsestà la basede toutesles inter-actionsdéveloppées.Elles permettentd’avoir un contrôlesur l’application sansdevoir passerparl’interface2D existante.
Lesdifférentscontrôlesimaginéspermettentdedéclencherunretourtactiledé-pendantdesdonnéesexplorées.On a ainsiaccèsa desreprésentationsvibratoiresdechampsdescalaires,maisaussidechampsvectoriels.Maisils permettentaussile contrôledel’applicationàdifférentsniveaux,autantpourle chargementdedon-néesquepourla gestiondemoyensvisuelsd’explorationdesdonnées.
3.4 Modesd’exploration
Grâceàla détectiondesconfigurations,onpeutcontrôlerl’exploration desdon-néesen faisantcorrespondreà chaqueconfigurationun moded’exploration desdonnées.Cesmodesd’exploration répondentà desproblèmesrencontréspar lesutilisateurslorsdela visualisationdedonnées.
23

3.4.1 Contrainte sur surface
Cemodepermetdecontraindrela mainde l’utilis ateursurunesurface,et en-suitededonnerun retourtactilecorrespondantauxdonnéessurcettesurface.
La contraintesurunesurfacesejustifie paruneconstatation surla manipulationde donnéesen trois dimensions : il estquasimentimpossible de suivre un ligne,ou derestersurunesurfaceenl’absencederetourdeforce.Or, l’util isateurpeutvouloir selimiter à l’explorationdesdonnéessurunesurfacedonnée.Dèslors,unretourd’effort estnécessaire.
Le paradigmed’interactionretenuestceluidela contraintesurunplandecoupedesdonnées(fig. 3.2). C’est en effet un outils largementutilisé en visualisationscientifique.Mais on peutcependantimaginerd’étendrela contraindreà unesur-facequelconque(isosurface,champdehauteur, ...).
FIG. 3.2 – Un plandecoupedanslesdonnées(la boulecorrespondà la positiondela main)
La techniquenécéssitedeuxétapes.Lapremière,leplacementduplandecoupe,tiens plus du contrôled’applicationque du retour haptique.On rentredanscemodeenplaçantsamainà plat (fig. 3.3).On contrôlealorsun plandecoupequisuit le plandela main.
Pour fixer le plan, il suffit de se placer dansla configurationd’explorationcontrainte(fig. 3.3). Le plan de coupene bougeplus, et l’explorationdesdon-néesest limitéeà ce plan par l’adjonction d’un retourde force, le Spidarétantalorsaccrochéauboutdel’index. La forceestcalculéeenplaçantunressortetunamortissements virtuelsentrela mainet saprojectionsurle plan.
24
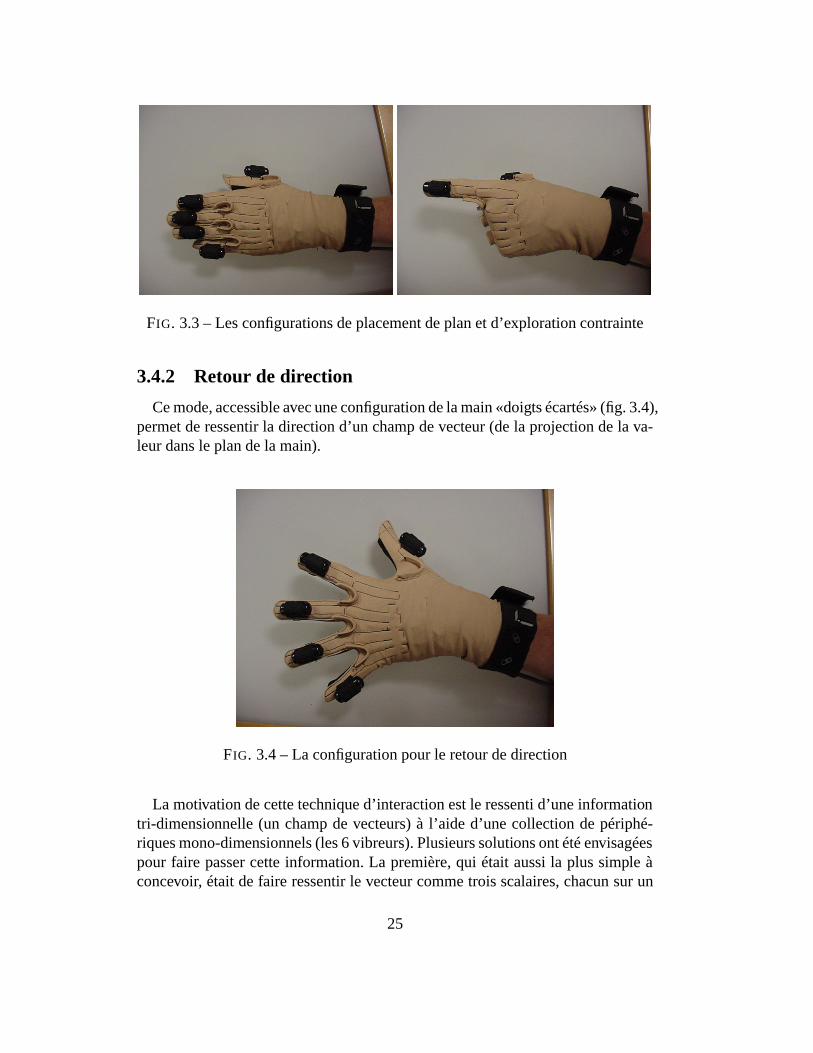
FIG. 3.3– Lesconfigurationsdeplacementdeplanet d’explorationcontrainte
3.4.2 Retour de dir ection
Cemode,accessibleavecuneconfigurationdelamain«doigtsécartés»(fig. 3.4),permetderessentirla directiond’un champdevecteur(dela projectiondela va-leurdansle plandela main).
FIG. 3.4– La configurationpourle retourdedirection
La motivationdecettetechniqued’interactionestle ressentid’uneinformationtri-dimensionnelle(un champde vecteurs)à l’aide d’une collectionde périphé-riquesmono-dimensionnels(les6 vibreurs).Plusieurssolutionsontétéenvisagéespour faire passercetteinformation.La première,qui était aussila plus simple àconcevoir, étaitdefaire ressentirle vecteurcommetrois scalaires,chacunsurun
25
doigt.Maiscettesolutionposeunproblèmemajeur: l’interprétationdetroisvibra-tionsn’estpasaisée,d’autantplusquelesvibrationssontdifficiles à discriminer(parexemple,si lesvibreursdel’index et du majeurfonctionnentà unniveauas-sezélevé, il estimpossibledediresi celuidumajeurestenaction).
La solutionà ce problèmeestd’utili ser les vibreursdansleur ensemble,pourcréerun ou des«zone(s)»de la main danslaquelle il y a desvibrations. Dèslors, en exploitant la configuration«doigtsécartés»,on peutcommuniquer uneinformationdedirectionsurtout l’arc decerclecouvert parla main.
Deuxpossibilités sontenvisagées: le fait quela mainsoitdansla bonnedirec-tion peutêtre indiqué soit par desvibrationssur le(s) doigt(s)dansla directiondu champ,soit par l’arrêt desvibrations.La premièresolutionsemblaitla plusévidente.Mais aprèsavoir utilisé le gantpendantplusieurssemaines,il devenaitévidentquel’expositionauxvibrationsdevientfatiganteàla longue.La deuxièmesolutionapparaîtdonccommedesvibrationsindiquantla «résistance»duchamp,la directionduchampétantuneposition deconfort(carsansvibrations)pourl’uti-lisateur.
Le retourdedirectionn’estpasfait dansla directionréelledesdoigts,à causede la calibrationpeuefficacedu gantdisponible dansl’application fournie avecle gant.Nouscalculonsdonc les vibrationscommesi les doigtscouvraientundemi-cercle,chaquedoigtayantentreeuxunanglede ����� .
Cetteapproximation, bien que loin d’être vraie, se révèleefficace,au vu destestsinformelsréalisés.Eneffet, l’utilis ateurcherche,parun mouvementde«ba-layage»,à placersamaindansle sensdu champ,et reçoit doncun retoursur lemajeur, qui estle doigtpourlequell’approximation estla meilleure.
3.4.3 Exploration temporelle
Une des demandespour l’exploration de donnéesétait de pouvoir regarderl’evolution temporelled’unedonnéeenun point. Celanécessitedepouvoir suc-cessivement:
– sedéplacerdanslesdonnéesjusqu’aupointd’intérêt;– semaintenirsurcepoint;– pouvoir naviguerdanslespasdetemps.Le fait deplacerla maindansla configurationcorrespondantàcetteexploration
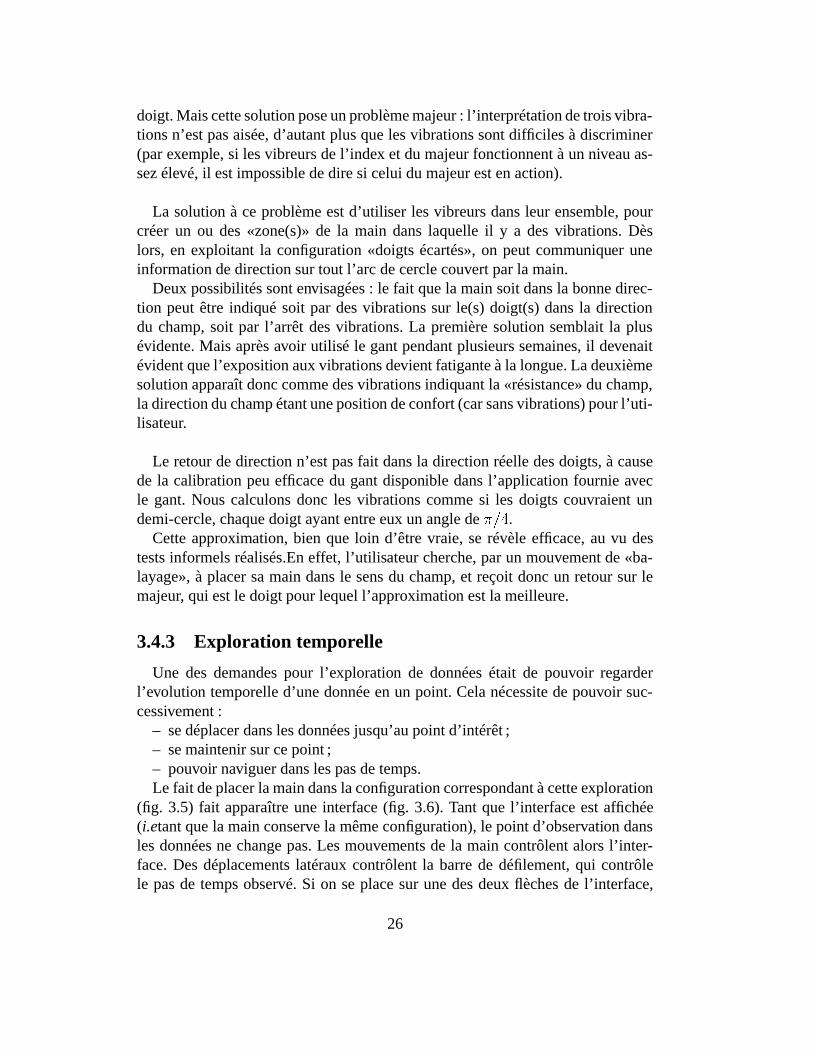
(fig. 3.5) fait apparaîtreuneinterface(fig. 3.6). Tant quel’interfaceestaffichée(i.etantquela mainconserve la mêmeconfiguration),le pointd’observation dansles donnéesne changepas.Les mouvementsde la main contrôlentalorsl’inter-face.Desdéplacementslatérauxcontrôlentla barrede défilement,qui contrôlele pasde tempsobservé.Si on seplacesur unedesdeuxflèchesde l’interface,
26
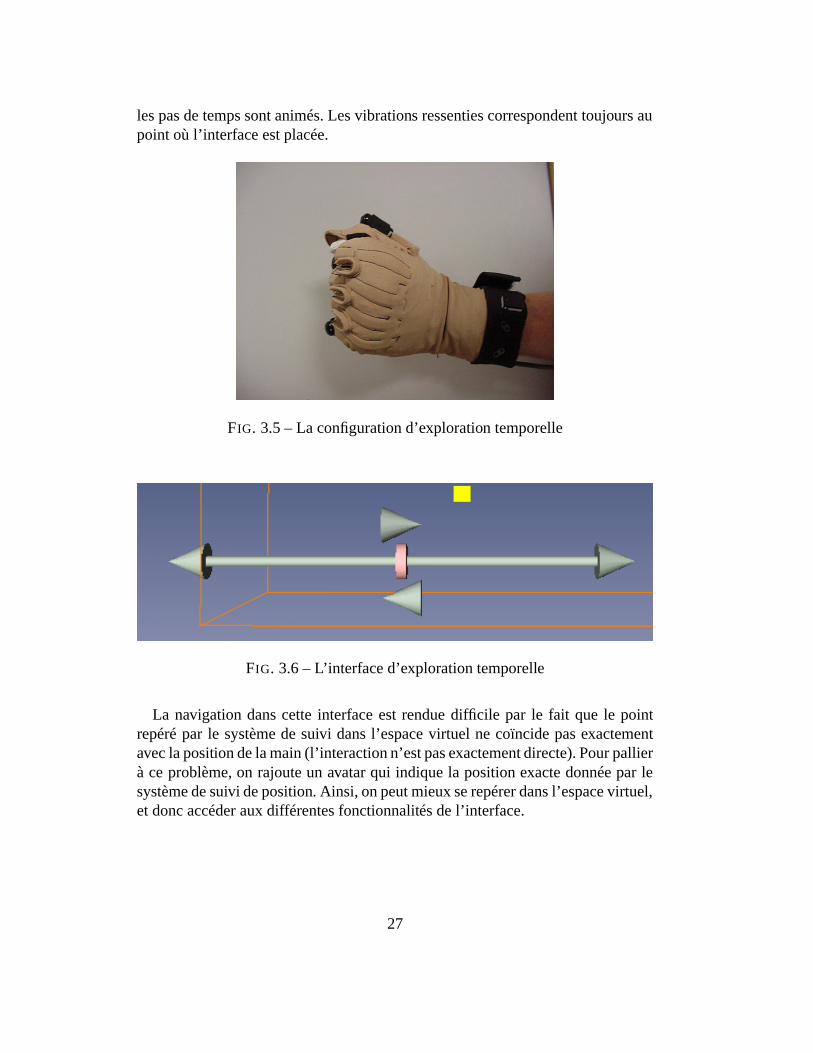
lespasdetempssontanimés.Lesvibrations ressentiescorrespondenttoujoursaupointoù l’interfaceestplacée.
FIG. 3.5– La configurationd’exploration temporelle
FIG. 3.6– L’interfaced’explorationtemporelle
La navigation danscetteinterfaceest renduedifficile par le fait que le pointrepérépar le systèmede suivi dansl’espacevirtuel ne coïncidepasexactementaveclapositiondelamain(l’interactionn’estpasexactementdirecte).Pourpallierà ce problème,on rajouteun avatarqui indiquela positionexactedonnéepar lesystèmedesuivi deposition. Ainsi, onpeutmieuxserepérerdansl’espacevirtuel,et doncaccéderauxdifférentesfonctionnalitésdel’interface.
27
3.5 Configurations de la main
Le gantde donnéesa étéoriginellementdéveloppépour permettrede recons-truire facilementun modèlede la mainpourpermettreuneanimation réalistedemainvirtuelle,ouuneinteractionprécisedansunescènederéalitévirtuelle.Il estd’ailleurscommercialiséavecun logiciel qui gèrecemodèledela main.
Maisle problèmemajeurestl’interprétationdesdonnéesrenvoyéesparlescap-teurspourreconstruirele modèledela main.Eneffet, la procéduredecalibrationfournieavec le gantparaîtsuffisantepouruneutilisationvisuellede la mainvir-tuelle,maisdansle cadred’une interactionhaptique,uneplus grandeprécisionestrequise.
Pourcela,desprocéduresdecalibrationont étédéveloppéespourlespositionsprécisesdupouceetdel’index [7].
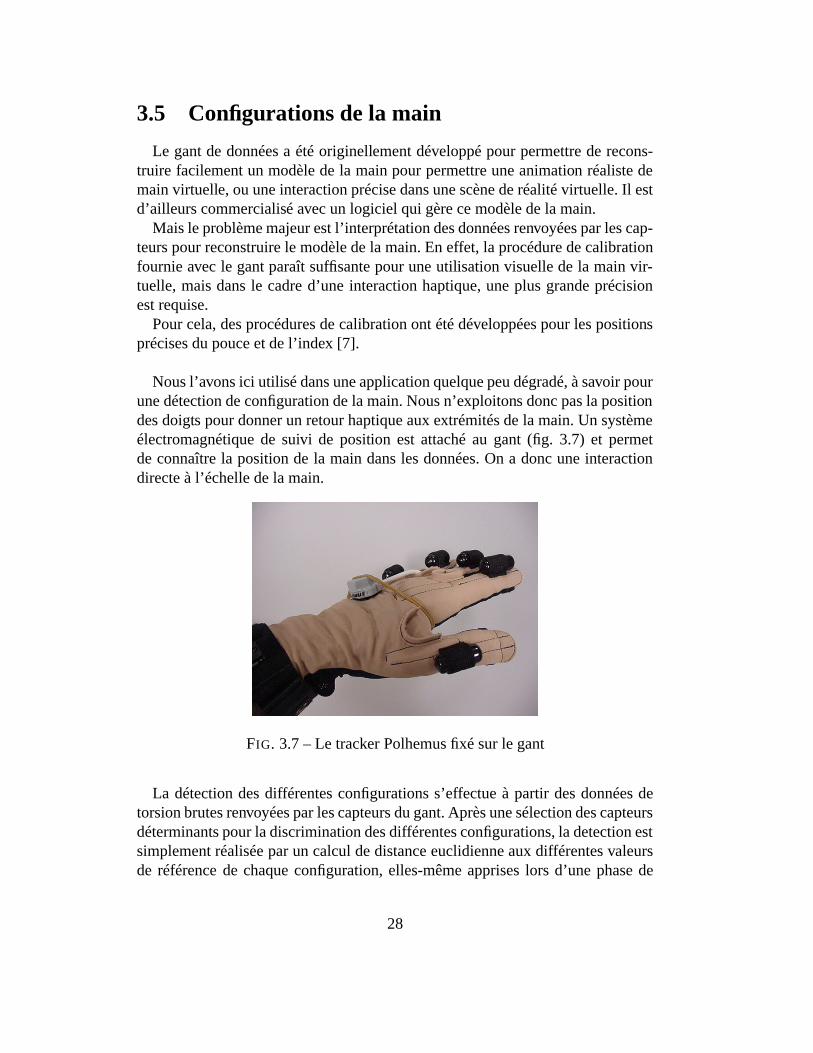
Nousl’avonsici utilisédansuneapplicationquelquepeudégradé,àsavoir pourunedétectiondeconfigurationdela main.Nousn’exploitonsdoncpasla positiondesdoigts pourdonnerun retourhaptiqueauxextrémitésdela main.Un systèmeélectromagnétiquede suivi de position est attachéau gant (fig. 3.7) et permetde connaîtrela positionde la main dansles données.On a doncuneinteractiondirecteà l’échelledela main.
FIG. 3.7– Le tracker Polhemusfixé surle gant
La détectiondesdifférentesconfigurationss’effectueà partir desdonnéesdetorsionbrutesrenvoyéesparlescapteursdugant.Aprèsunesélectiondescapteursdéterminantspourla discriminationdesdifférentesconfigurations,la detectionestsimplementréaliséeparun calculdedistanceeuclidienneauxdifférentesvaleursde référencede chaqueconfiguration,elles-mêmeappriseslors d’une phasede
28

calibration.Cettecalibrationconsiste simplementà placersamaindansla confi-gurationà apprendrependantun courslapsde temps.Pourchacundescapteursdéterminants,la valeurmoyennedesdonnéesrécupéréespendantle tempsdecali-brationserviradevaleurderéférence.Le systèmeestsimpleetrobuste,ets’adaptebienà l’application.
29

Perspectiveset Conclusion
Ceprojetapermisdejeterlesbasespourle développementdetechniquesd’in-teractiontactilesen visualisation scientifique,domainede rechercheencorepeuexploré.
En effet, si lesparadigmespour le retourdeforcesontbienconnus,il n’en vapasde mêmepour le retourtactile,et les domainessontassezéloignéspour nepaspouvoir sebasersurlesrésultatsobtenusavecle retourdeforce.
Il a doncfallu, au-delàde la compréhensionet de l’appropriationdesproblé-matiquesde la réalitévirtuelle, de l’haptique enparticulieret de la visualisationscientifique,imaginerl’util isationquel’on pouvait fairedespériphériquesànotredisposition.
Maislespremièresapprochesenvisagéessemblentdonnerdesrésultatsconcluants,mêmesi unevalidation formelleseraitnécessairepour justifier de la qualité desinteractionsdéveloppées.
De plus, l’exploration d’autrestypesde retour tactile (variation de tempéra-ture,matricesd’aiguilles,. . .) devrait permettred’enrichir fortementlespossibili-tésd’interactionricheavecdesdonnées.
De nombreusespistessontdoncà explorer, dansle cadred’une thèse,notam-mentla miseenplacedeprocéduresdevalidation.Enparticulier, il sembleévidentqu’unemeilleurecompréhensiondenoscapacitéssensoriellesseraitun plusnonnégligeabledansla conceptiondeparadigmesadaptésànossens.
De même,unecollaborationencoreplus étroiteavec les utilisateursde la vi-sualisationscientifiquepermettraitdemieuxcomprendrelesproblématiquesaux-quellesils sontconfrontés,et doncdemieuxy répondre,l’intérêt desparadigmesdéveloppésétantfortementlié aucontexteapplicatif.
30
Bibliographie
[1] J.Brederson,M. Ikits, C. Johnson,andC. Hansen.Thevisualhapticwork-bench,2000.
[2] D.G. Caldwell,O. Kocak,andU. Andersen.Multi-armeddexterousmani-pulatoroperationusingglove/exoskeletoncontrolandsensoryfeedback.InInternational Conferenceon IntelligentRobotsandSystems-Volume2, page2567,1995.
[3] Li-Te Cheng,Rick Kazman,andJohnA. Robinson.Vibrotactilefeedbackin delicatevirtual reality operations.In ACM Multimedia, pages243–251,1996.
[4] L. Durbeck,N. Macias,D. Weinstein,C. Johnson, andJ.Hollerbach.Scirunhapticdisplay for scientificvisualization, 1998.
[5] Mario Enriquez,Oleg Afonin, BrentYager, andKaronMaclean.A pneuma-tic tactilealertingsystemfor thedrivingenvironment.
[6] R.S.Gallagher. ComputerVisualization : GraphicsTechniquesfor ScientificandEngineeringAnalysis. CRCPress,BocaRaton,1995.
[7] W.B. Griffin, R.P. Findley, M.L. Turner, and M.R. Cutkosky. Calibrationand mappingof a humanhandfor dexteroustelemanipulation. In ASMEIMECE2000SymposiumonHaptic Interfacesfor Virtual EnvironmentsandTeleoperator Systems.
[8] M. KawakamiH. Kajimoto, M. Inami andS. Tachi. Smarttouch- augmen-tationof skinsensationwith electrocutaneousdisplay. In Proceedingsof the11thSymposium on Haptic Interfacesfor Virtual EnvironmentandTeleope-rator Systems, 2003.
[9] RobertHowe. Pin-basedtactileshapedisplays.In JournéeScientifique In-ternationale IRCICA, 2004.
[10] Y. Ikei, K. Wakamatsu,andS.Fukuda.Imagedatatransformationfor tactiletexturedisplay. In Virtual RealityAnnualInternationalSymposium, page51,1998.
31
[11] Melli-HuberJ.,WeinbergB.,FischA., NikitczukJ.,MavroidisC.,andWam-pler C. Electro-rheologicalfluidic actuatorsfor hapticvehicularinstrumentcontrols. In 11thSymposiumon Haptic Interfacesfor Virtual EnvironmentandTeleoperator Systems(HAPTICS’03), 2003.
[12] Mavroidis Pfeiffer Lennon. Modeling anddesignof anelectro-rheologicalfluid basedhapticsystemfor tele-operationof spacerobots.
[13] M.J. Massimino and T.B. Sheridan. Sensorysubstitution for force feed-backin teleoperation.Presence: Teleoperators and Virtual Environments,2(4) :344–352, 1993.
[14] C. Mavroidis, C. Pfeiffer, J. Celestino,and et al. Controlledcompliancehapticinterfaceusingelectro-rheologicalfluids.
[15] A. Okamura,M. Hage,J.Dennerlein,andM. Cutkosky. Improving reality-basedmodelsfor vibrationfeedback,2000.
[16] Allison M. Okamura,Mark R.Cutkosky, andJackTigh Dennerlein.Reality-basedmodelsfor vibrations feedbackin virtual environments, 2001.
[17] Lucy Y. Paoandet al. Synergistic visual/hapticcomputerinterfaces.
[18] Jean-Paul PapinandPhilippeFuchs.Le traité dela rálité virtuelle, Volume1, chapter9. Pressesdel’Ecole desMinesdeParis,secondedition,2003.
[19] W. R. Provancher. On Tactile SensingandDisplay. PhDthesis,StandfordUniversity, 2003.
[20] R. J. Stone. Virtual reality & telepresence– a uk iniative. In 1st AnnualConferenceonVirtual Reality, pages40–45.
[21] N. Tarrin,S.Coquillart,S. Hasegawa, L. Bouguila,andM. Sato.Thestrin-gedhapticworkbench: a new hapticworkbenchsolution. In Eurographics2003Proceedings.
[22] A. van Dam, A. S. Forsberg, D. H. Laidlaw, J. J. LaViola Jr., and R. M.Simpson.Immersivevr for scientificvisualization: A progressreport.IEEEComputerGraphicsandApplications, pages26–52,dec2000.
32





























