Embed Size (px)
Citation preview

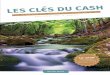
Robot manipulateur

1 2
4
3
5
6
7
Coude
V1
V2
Pivot (A,z)
Pivot (G,z)
Pivot (O,z)
Pivot (B,z)
Pivot (C,z)
Pivot (D,z)
Pivot (E,z) Pivot
(E,z)
Pivot (F,z)
Pivot (I,z)
Pivot (J,z)
Pivot (L,y)
Pesanteur
Moteur8
Graphe des liaisons
Pivot (H,z)

1 2
4
3
5
6
7
Coude
V1
V2
Pivot (A,z)
Pivot (G,z)
Pivot (O,z)
Pivot (B,z)
Pivot (C,z)
Pivot (D,z)
Pivot (E,z) Pivot
(E,z)
Pivot (F,z)
Pivot (I,z)
Pivot (J,z)
Pivot (L,y)
Pesanteur
Moteur8
On isole tous les solides ou groupes de solides soumis à 2 glisseurs
Pivot (H,z)

∆F4->coude
On isole 4

1 2
4
3
5
6
7
Coude
V1
V2
Pivot (A,z)
Pivot (G,z)
Pivot (O,z)
Pivot (B,z)
Pivot (C,z)
Pivot (D,z)
Pivot (E,z) Pivot
(E,z)
Pivot (F,z)
Pivot (I,z)
Pivot (J,z)
Pivot (L,y)
Pesanteur
Moteur8
On isole tous les solides ou groupes de solides soumis à 2 glisseurs
Pivot (H,z)

∆F4->coude
∆FV1->2
On isole V1

1 2
4
3
5
6
7
Coude
V1
V2
Pivot (A,z)
Pivot (G,z)
Pivot (O,z)
Pivot (B,z)
Pivot (C,z)
Pivot (D,z)
Pivot (E,z) Pivot
(E,z)
Pivot (F,z)
Pivot (I,z)
Pivot (J,z)
Pivot (L,y)
Pesanteur
Moteur8
On isole tous les solides ou groupes de solides soumis à 2 glisseurs
Pivot (H,z)

∆F4->coude
∆FV1->2
∆FV2->2
On isole V2

1 2
4
3
5
6
7
Coude
V1
V2
Pivot (A,z)
Pivot (G,z)
Pivot (O,z)
Pivot (B,z)
Pivot (C,z)
Pivot (D,z)
Pivot (E,z) Pivot
(E,z)
Pivot (F,z)
Pivot (I,z)
Pivot (J,z)
Pivot (L,y)
Pesanteur
Moteur8
On isole tous les solides ou groupes de solides soumis à 2 glisseurs
Pivot (H,z)

∆F4->coude
∆FV1->2
∆FV2->2
∆F5->6 On isole 5

1 2
4
3
5
6
7
Coude
V1
V2
Pivot (A,z)
Pivot (G,z)
Pivot (O,z)
Pivot (B,z)
Pivot (C,z)
Pivot (D,z)
Pivot (E,z) Pivot
(E,z)
Pivot (F,z)
Pivot (I,z)
Pivot (J,z)
Pivot (L,y)
Pesanteur
Moteur8
On isole 6+7, soumis à 3 glisseurs- Un entièrement connu- Un dont la direction est connue
Pivot (H,z)

On isole 6+7∆F4->coude
∆FV1->2
∆FV2->2
∆F5->6
∆P
∆F3->6

∆F4->coude
∆FV1->2
∆FV2->2
∆F5->6
∆P
∆F3->6 PF5->6
F3->6
On isole 6+7
F5->6=6000 daN
F3->6=5100 daN

1 2
4
3
5
6
7
Coude
V1
V2
Pivot (A,z)
Pivot (G,z)
Pivot (O,z)
Pivot (B,z)
Pivot (C,z)
Pivot (D,z)
Pivot (E,z) Pivot
(E,z)
Pivot (F,z)
Pivot (I,z)
Pivot (J,z)
Pivot (L,y)
Pesanteur
Moteur8
On isole 3, soumis à 3 glisseurs- Un entièrement connu- Un dont la direction est connue
Pivot (H,z)

On isole 3Bilan des actions mécaniques extérieures
𝐹6→3ሬሬሬሬሬሬሬሬሬԦ= −5000.𝑥Ԧ− 1000.𝑦Ԧ 𝐹𝑉2→3ሬሬሬሬሬሬሬሬሬሬሬԦ= 𝐹𝑉2→3. 𝐷𝐻ሬሬሬሬሬሬԦ
ฮ𝐷𝐻ሬሬሬሬሬሬԦฮ = 𝐹𝑉2→3 × ሺ690.𝑥Ԧ+ 195.𝑦Ԧሻ717
𝐹𝑐𝑜𝑢𝑑𝑒→3ሬሬሬሬሬሬሬሬሬሬሬሬሬሬሬሬሬሬԦ= 𝑋𝑐𝑜𝑢𝑑𝑒→3.𝑥Ԧ+ 𝑌𝑐𝑜𝑢𝑑𝑒→3.𝑦Ԧ Théorème de la résultante projeté sur 𝑥Ԧ et 𝑦Ԧ
−5000+ 𝐹𝑉2→3 × 690717+ 𝑋𝑐𝑜𝑢𝑑𝑒→3 = 0
−1000+ 𝐹𝑉2→3 × 195717+ 𝑌𝑐𝑜𝑢𝑑𝑒→3 = 0

On isole 3Théorème du moment écrit en E projeté sur 𝑧Ԧ
𝑀𝐸൫𝐹6→3ሬሬሬሬሬሬሬሬሬԦ൯ሬሬሬሬሬሬሬሬሬሬሬሬሬሬሬሬሬሬሬሬԦ.𝑧Ԧ+ 𝑀𝐸൫𝐹𝑉2→3ሬሬሬሬሬሬሬሬሬሬሬԦ൯ሬሬሬሬሬሬሬሬሬሬሬሬሬሬሬሬሬሬሬሬሬሬሬԦ.𝑧Ԧ= ൫𝐸𝐽ሬሬሬሬԦ∧𝐹6→3ሬሬሬሬሬሬሬሬሬԦ+ 𝐸𝐻ሬሬሬሬሬሬԦ∧𝐹𝑉2→3ሬሬሬሬሬሬሬሬሬሬሬԦ൯.𝑧Ԧ= 0
ቈሺ1,47.𝑥Ԧ− 0,655.𝑦Ԧሻ∧ሺ−5000.𝑥Ԧ− 1000.𝑦Ԧሻ+ሺ0,44.𝑥Ԧ− 0,25.𝑦Ԧሻ∧ቆ𝐹𝑉2→3 × ሺ690.𝑥Ԧ+ 195.𝑦Ԧሻ717 ቇ .𝑧Ԧ= 0
⇒−1470− 3275+ 𝐹𝑉2→3 × ሺ0,12+ 0,24ሻ= 0
Détermination des inconnues
⇒𝐹𝑉2→3 ×= 47450,36 = 13180 𝑑𝑎𝑁⇒𝑋𝑉2→3 = 12684 𝑑𝑎𝑁𝑌𝑉2→3 = 3585 𝑑𝑎𝑁
⇒𝑋𝑐𝑜𝑢𝑑𝑒→3 = 5000− 𝐹𝑉2→3 × 690717 = −7684 𝑑𝑎𝑁
⇒𝑌𝑐𝑜𝑢𝑑𝑒→3 = 1000− 𝐹𝑉2→3 × 195717 = −2585 𝑑𝑎𝑁

∆FV2->2FV2-> 3
Fcoude->3
On isole 3
F6->3

1 2
4
3
5
6
7
Coude
V1
V2
Pivot (A,z)
Pivot (G,z)
Pivot (O,z)
Pivot (B,z)
Pivot (C,z)
Pivot (D,z)
Pivot (E,z) Pivot
(E,z)
Pivot (F,z)
Pivot (I,z)
Pivot (J,z)
Pivot (L,y)
Pesanteur
Moteur8
On isole le coude, soumis à 4 glisseurs- Deux entièrement connu: F3->coude et F5->coude- Un dont la direction est connue: F4->coude
Pivot (H,z)

∆F4->coudeF3->coude
On isole le coude
F5->coude
On travaille avec un glisseurs équivalentF3+5->coude appliqué au point M
Pour se ramener à un problème à 3 glisseurs
+M
F5->coude
F3+5->coude

∆F4->coudeOn isole le coude
On travaille avec un glisseurs équivalentF3+5->coude appliqué au point M
Pour se ramener à un problème à 3 glisseurs
+M
F3+5->coude
∆F3+5->coude
∆F2->coude

∆F4->coudeOn isole le coude
F4->coude=5700 daNF2->coude=11500 daN
+M
F3+5->coude
∆F3+5->coude
∆F2->coude
F2->coude
F4->coude

1 2
4
3
5
6
7
Coude
V1
V2
Pivot (A,z)
Pivot (G,z)
Pivot (O,z)
Pivot (B,z)
Pivot (C,z)
Pivot (D,z)
Pivot (E,z) Pivot
(E,z)
Pivot (F,z)
Pivot (I,z)
Pivot (J,z)
Pivot (L,y)
Pesanteur
Moteur8
On isole 2, soumis à 4 glisseurs- 2 entièrement connu: F coude ->2 et FV2->2- Un dont la direction est connue: FV1->2
Pivot (H,z)

On isole 2
NFcoude->2
FV2-> 2
∆FV1->2
On travaille avec un glisseurs équivalentFcoude+V2->2 appliqué au point N
Pour se ramener à un problème à 3 glisseurs
+
FV2-> 2Fcoude+v2->2

On isole 2
N
∆FV1->2
On travaille avec un glisseurs équivalentFcoude+V2->2 appliqué au point N
Pour se ramener à un problème à 3 glisseurs
+
Fcoude+v2->2

On isole 2Bilan des actions mécaniques extérieures
𝐹𝑐𝑜𝑢𝑑𝑒+𝑉2→2ሬሬሬሬሬሬሬሬሬሬሬሬሬሬሬሬሬሬሬሬሬሬሬሬሬԦ= −2380.𝑥Ԧ− 9100.𝑦Ԧ 𝐹𝑉1→2ሬሬሬሬሬሬሬሬሬሬሬԦ= 𝐹𝑉1→2. 𝐵𝐶ሬሬሬሬሬԦ
ฮ𝐵𝐶ሬሬሬሬሬԦฮ = 𝐹𝑉1→2 × ሺ50.𝑥Ԧ+ 430.𝑦Ԧሻ433
𝐹0→2ሬሬሬሬሬሬሬሬሬԦ= 𝑋0→2.𝑥Ԧ+ 𝑌0→2.𝑦Ԧ Théorème de la résultante projeté sur 𝑥Ԧ et 𝑦Ԧ
−2380+ 𝐹𝑉1→2 × 50433+ 𝑋0→2 = 0
−9100+ 𝐹𝑉1→2 × 430433+ 𝑌0→2 = 0

On isole 2Théorème du moment écrit en O projeté sur 𝑧Ԧ
𝑀𝑂൫𝐹𝑐𝑜𝑢𝑑𝑒+𝑉2→2ሬሬሬሬሬሬሬሬሬሬሬሬሬሬሬሬሬሬሬሬሬሬሬሬሬԦ൯ሬሬሬሬሬሬሬሬሬሬሬሬሬሬሬሬሬሬሬሬሬሬሬሬሬሬሬሬሬሬሬሬሬሬሬሬԦ.𝑧Ԧ+ 𝑀𝑂൫𝐹𝑉1→2ሬሬሬሬሬሬሬሬሬሬሬԦ൯ሬሬሬሬሬሬሬሬሬሬሬሬሬሬሬሬሬሬሬሬሬሬሬԦ.𝑧Ԧ= ൫𝑂𝑁ሬሬሬሬሬሬԦ∧𝐹𝑐𝑜𝑢𝑑𝑒+𝑉2→2ሬሬሬሬሬሬሬሬሬሬሬሬሬሬሬሬሬሬሬሬሬሬሬሬሬԦ+ 𝑂𝐶ሬሬሬሬሬԦ∧𝐹𝑉1→2ሬሬሬሬሬሬሬሬሬሬሬԦ൯.𝑧Ԧ= 0
ቈሺ1,055.𝑥Ԧ+ 0,83.𝑦Ԧሻ∧ሺ−2380.𝑥Ԧ− 9100.𝑦Ԧሻ+ሺ0,25.𝑥Ԧ+ 0,43.𝑦Ԧሻ∧ቆ𝐹𝑉1→2 × ሺ50.𝑥Ԧ+ 430.𝑦Ԧሻ433 ቇ .𝑧Ԧ= 0
⇒−9600+ 1975+ 𝐹𝑉1→2 × ሺ0,25− 0,05ሻ= 0
Détermination des inconnues
⇒ 𝐹𝑉2→3 ×= 76250,2 = 38125 𝑑𝑎𝑁⇒ 𝑋𝑉2→3 = 4400 𝑑𝑎𝑁𝑌𝑉2→3 = 37861 𝑑𝑎𝑁 ⇒𝑋0→2 = 2380− 𝐹𝑉1→2 × 50433 = −2020 𝑑𝑎𝑁
⇒ 𝑌0→2 = 9100− 𝐹𝑉1→2 × 430433 = −28761 𝑑𝑎𝑁