Embed Size (px)
Citation preview

ROULEMENT SANS GLISSEMENTVITESSE DE
CONDITIONS DE
RAPPEL DE COURSETUDE DE CAS
EXERCICESMETHODE ANALYTIQUE
11/04/23 1Rappel de cours, roulement sans glissement
ICAM NANTES

ROULEMENT ET GLISSEMENT
SOL
S1
x
y x1
RAYON R
x
(t)
(t)
P
I
Si on s’intéresse à la vitesse de INulle ? Voir la trajectoire si la roue roule sans glisser)°(t) x ????
Rappel de cours, roulement sans glissement
11/04/23 2

SOL
S1
x
y x1
RAYON R
x
(t)
(t)
P
I
Si on s’intéresse à la vitesse de INulle ? Voir la trajectoire si la roue roule sans glisser)°(t) x ????
Il y a 3 points I :
I, point de contact entre les deux solides. Ce point n’appartient à aucun solide. On l’appelle aussi point coïncidant ou point géométrique. C’est la vitesse que l’on obtient si on dérive le vecteur OI = (t) x.
VI/0 = [dOI/dt]0
C
11/04/23 3Rappel de cours, roulement sans glissement

SOL
S1
x
y
x1
RAYON R
x(t)
(t)
I
Si on s’intéresse à la vitesse de INulle ? Voir la trajectoire si la roue roule sans glisser)°(t) x ????
I, point du solide S1. Avant, ce point s’appelait P. Quand ce point est au contact de l’autre solide, il s’appelle I. Son vecteur position est OI = (t) x + r y – r x1 avec x1 confondu avec – y, ce qui nous interdit de dériver pour trouver VI1/0 ;
la dérivée d’une fonction nulle à l’instant t (r y – r x1), n’est pas nulle.
On utilise alors l’équiprojectivité des vecteurs vitesse des points du solide S1/S0
VI1/0 = VC1/0 + IC 1/0.
I, point du solide S0. Dans ce cas, cette vitesse est nulle.
C
11/04/23 4Rappel de cours, roulement sans glissement

La vitesse du point de contact s’obtient par dérivation. VI/0 = [dOI/dt]0
La vitesse de I, point du solide 1, se calcule par équiprojectivité à partir d’un autre point dont on peut calculer la vitesse. VI1/0 = VA1/0 + IA 1/0
La vitesse de I, point du solide 2, se calcule par équiprojectivité à partir d’un autre point dont on peut calculer la vitesse. VI2/0 = VB2/0 + IB 2/0
VI1/2 s’appelle la vitesse de glissement entre les deux solides.
A
B OI
C
11/04/23 5Rappel de cours, roulement sans glissement
1
2CONCLUSION

La vitesse du point de contact s’obtient par dérivation du vecteur unitaire : VI/0 = [dOI/dt]0
La vitesse de glissement se calcule par composition des vitesse des points des solides en présence :
VI1/2 = VI1/0 - VI2/0
Ou bien par composition des vitesse des points géométriques (méthode plus compliquée)
VI/1 = VI/2 + VI1/2Avec :VI/1 = [dAI/dt]1 avec A point fixe de 1 VI/2 = [dBI/dt]2 avec B point fixe de 2
Et :La vitesse de glissement est TOUJOURS dans le plan tangent de contact. On l’exprimera en fin de calcul selon des vecteurs unitaires appartenant à ce plan tangent de contact.
A
B
I
1
2
11/04/23 6Rappel de cours, roulement sans glissement
VI1/
2 CONCLUSION

EXERCICES TYPES
• Transformation de mouvement : pompe à essence
• Réducteur train d’engrenages axes parallèles• Odomètre• Elévateur
11/04/23 7

Transformation de mouvement
Pompe à essence
11/04/23 8

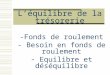
Le dispositif représenté ci-dessous modélise la transformation de mouvement dans un mécanisme de pompe à essence.
L’excentrique S1 est en liaison pivot d’axe (O, z0) avec le bâti.Le poussoir S2 est en liaison pivot glissant d’axe (O, x0) avec le bâti.L’excentrique S1 est en contact avec poussoir S2 au point I.
S1S2
x0
y0
I
OC = e. x1
(t) =(x0, x1)Rayon de S1 : R
x1
Transformation de mouvement, pompe à essence
11/04/23 9
CO

Déterminer la vitesse de glissement en I entre S1 et S2.Déterminer l’accélération du point M appartenant au poussoir par rapport au bâti. Application numérique : N1/0 = 3000tr/min ; R = 20mm ; e = 7mm. Pour quelle position de S1 la vitesse de glissement est-elle la plus grande ?
S1S2
x0
y0
I
OC = e. x1
(t) =(x0, x1)Rayon de S1 : R
x1
CO
(t)
M
11/04/23 10Transformation de mouvement, pompe à essence

S1S2
x0
y0
I
OC = e. x1
(t) =(x0, x1)Rayon de S1 : R
x1
CO
VIS1/S2 = VIS1/S0 - VIS2/S0
VIS1/S2 =[ VOS1/S0 + IO S1/S0 ] - (t)° x0
VIS1/S2 =[ 0 + ( e x1 + R x0 ) (t)° z ] - (t)° x0
VIS1/S2 = ( e (t)° y1 + R (t)° y - (t)° x0
or
(t) = R + e cos (t)(t)° = - e (t)°sin (t)
(t)
11/04/23 11Transformation de mouvement, pompe à essence

S1S2
x0
y0
I
OC = e. x1
(t) =(x0, x1)Rayon de S1 : R
x1
CO
VIS1/S2 = e (t)° y1 + R (t)° y0 - (t)° x0
or
(t) = R + e cos (t)(t)° = - e (t)°sin (t)
y1 = cos (t) y0 - sin (t) x0
VIS1/S2 = [ e cos (t) + R ] (t)° y0
(t)
La vitesse de glissement est bien dans le plan tangent de
contact.
11/04/23 12Transformation de mouvement, pompe à essence

Déterminer l’accélération du point M appartenant au poussoir par rapport au bâti. M/R = (t)°° x0
avec (t) = R + e cos (t)
(t)° = - e (t)°sin (t) (t)°° = - e (t)°°sin (t) – e (t)°² cos (t)
S1S2
x0
y0
I
OC = e. x1
(t) =(x0, x1)Rayon de S1 : R
x1
CO
(t)
M
11/04/23 13Transformation de mouvement, pompe à essence

Autre problème
REDUCTEUR A AXES FIXESAXES PARALLELES
Réducteur axes fixes et parallèles, roues de friction ou engrenages
11/04/23 14

Le réducteur est composé• d’une roue motrice 1, de rayon r1 ,de centre O1
• d’une double roue intermédiaire 2, de petit rayon r2, de grand rayon R2 ,de centre O2
• d’une roue réceptrice 3, de rayon R3 ,de centre O3
Les trois roues sont en liaison pivot en leur centre avec le bâti. 1/0 = 1/0 z2/0 = 2/0 z3/0 = 3/0 z
Calculer la vitesse de glissement en I et J. Si ces vitesses de glissement sont nulles, déterminer la loi entrée sortie 3/0 / 1/0 Si la puissance d’entrée est égale à P = Cm m, si le rendement est égal à 1, en déduire le couple de sortie en N.m.s1
s2
s3
I
J
O1
O2
O3
x
y
u
11/04/23 15Réducteur axes fixes et parallèles, roues de friction ou engrenages

VI1/2 = VI1/0 - VI2/0 VI1/2 = [VO11/0 + IO1 1/0 ] - [VO22/0 + IO2 2/0 ] VJ2/3 = VJ2/0 - VJ3/0 VJ2/3 = [VO22/0 + JO2 2/0 ] - [VO33/0 + JO3 3/0 ]
s1
s2
s3
I
J
O1
O2
O3
x
y
uSi les vitesses de glissement sont nulles :
IO1 1/0 - IO2 2/0 = 0JO2 2/0 – JO3 3/0 = 0
-r1 y 1/0 z – R2 y 2/0 z = 0
-r2 u 2/0 z – R3 u 3/0 z = 0
-r1 1/0 – R2 2/0 = 0 et r2 2/0 + R3 3/0 = 0
En éliminant 2/0 des deux expressions, on obtient :3/0 r1 * r2
------ = ---------------1/0 R2 * R3
11/04/23 16Réducteur axes fixes et parallèles, roues de friction ou engrenages

s1
s2
s3
I
J
O1
O2
O3
x
y
uSi les vitesses de glissement sont nulles :
3/0 r1 * r2
------ = ---------------1/0 R2 * R3
La relation générale s’écrit : (avec p le nombre de contacts extérieurs )
SORTIE/0 (rayons des roues menantes)----------- = ( -1)p -----------------------------------------------ENTREE/0 (rayons des roues menées)
11/04/23 17Réducteur axes fixes et parallèles, roues de friction ou engrenages

ODOMETRE
11/04/23 18

Véhicule
s1
s4
s2
s3
y1
z1
C
I
B
y2
(t)
(t)
y4
h
(t)
Inspiré du CC6 2009
2010
A quoi est égale la cote (hauteur à la verticale) de B par rapport au sol ? En dérivant cette expression, déterminer la relation liant les paramètres (t) et (t), et leur dérivées.
VB/0 = °(t) y1
Rayon roue 4 : r
° sin + ° cos = 0
11/04/23 19

Véhicule
s1
s4
s2
s3
y1
z1
C
I
B
y2
(t)
(t)
y4
h
(t)
Inspiré du CC6 2009
2010
Calculer la vitesse du point I, point de contact entre S4 et S0, I point géométrique, dans son mouvement par rapport à S0.Montrer que cette vitesse est bien portée uniquement par y1.
VB/0 = °(t) y1
(t)
Rayon roue 4 : r
11/04/23 20

Véhicule
s1
s4
s2
s3
y1
z1
C
I
B
y2
(t)
(t)
y4
h
(t)
Inspiré du CC6 2009
2010
Calculer la vitesse de glissement en I entre S4 et S0, sachant que S1 a un mouvement de translation rectiligne de vitesse ° y1. Montrer que cette vitesse est bien portée uniquement par y1. En déduire alors les conditions de roulement sans glissement, ° en fonction des autres paramètres.
VB/0 = °(t) y1
Rayon roue 4 : r
11/04/23 21

Véhicule
s1
s4
s2
s3
y1
z1
C
I
B
y2
(t)
(t)
y4
h
(t)
Inspiré du CC6 2009
2010
VI4/0 = VC4/0 + IC4/0 (en dérivant OI on obtiendrait VI/0) VC4/0 = là on peut dériver ! = [dOC/dt]0 = (°- °cos + ° sin ) y1
IC4/0 = r z1(°+°) x1 = r (°+°)y1
VI4/0 = (°- °cos + ° sin + r (°+°)) y1
Conditions de roulement sans glissement : °- °cos + ° sin + r (°+°) = 0
VB/0 = °(t) y1
Rayon roue 4 : r
11/04/23 22

Elévateur
11/04/23 23

11/04/23 24
S3
S2
S1
S0
y1
x
y
y2
(t)
(t)
(t)
Crémaillère
Pignon
Un élévateur de charge est motorisé par : un motoréducteur fixé sur le bâti agit sur le bras S1 en Oun motoréducteur fixé en bout de bras S1 agit sur le pignon S2 en C
Le solide S3 est en liaison glissière avec le bâti S0
Le solide S2 est en liaison pivot (C,z) avec le solide S1
Le solide S1 est en liaison pivot (O,z) avec le solide S0
En I, il y a engrènement du pignon S2 sur la crémaillère S3
O
C
I
OC = LPignon rayon r
Déterminer, en utilisant la condition de roulement sans glissement, la liaison entre les deux paramètres (t) et (t).
A

11/04/23 25
S3
S2
S1
S0
y1
x
y
y2
(t)
(t)
(t)
Crémaillère
Pignon
O
C
I
La vitesse de glissement en I est définie par VI3/2On utilise la composition VI3/2 = VI3/0 + VI0/2 = VI3/0 - VI2/0Il ne faut surtout pas dériver pour trouver les vitesses des point I appartenant aux solides !Il faut utiliser le champ distributif des vecteurs vitesses des points d’un solide (équiprojectivité)VI3/2 = [ VA3/0 + IA3/0] - [ VC2/0 + IC2/0] VI3/2 = [ °(t) y+ IA0] - [ VC2/0 + IC2/0] VI3/2 = °(t) y – [ - L° x1 + (-r y) (°+°) z] = °(t) y + L° x1 + r (°+°) x Il faut maintenant vérifier que cette vitesse de glissement est bien sur x
A
x1
(t)
On remarque que :
(t) = L cos + rEn dérivant par rapport au temps :°(t) = - L ° sin
et : x1 = cos x + sin y

11/04/23 26
S3
S2
S1
S0
y1
x
y
y2
(t)
(t)
(t)
Crémaillère
Pignon
O
C
I
VI3/2 = °(t) y + L° x1 + r (°+°) x °(t) = - L ° sin x1 = cos x + sin y
Il faut maintenant vérifier que cette vitesse de glissement est bien sur xVI3/2 = - L ° sin y + L° (cos x + sin y) + r (°+°) x VI3/2 = (L° cos + r (°+°)) x Les conditions de roulement sans glissement sont : L° cos + r (°+°) = 0
A
x1
(t)

LANCEUR DE PIGEON D’ARGILE
11/04/23 27

11/04/23 28
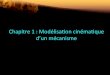
Un lanceur de pigeon d’argile est un dispositif permettant de lancer des « assiettes » en terre cuite lors des ball-traps. L’inclinaison est constante. On arme le dispositif puis on lâche. Les forces d’inertie expulsent le projectile vers l’extérieur et les frottements lui appliquent un mouvement de rotation propre. A la fin du lancement, il s’élance en l’air avec une vitesse initiale et un mouvement de rotation (comme un frisbee).

11/04/23 29
SCHEMA
(t)
(t)
(t)
IC
O
Ecrire la liaison entre les 3 paramètres de position.
S1
S2
http://www.youtube.com/watch?v=Sq0XFihdC7Q&NR=1http://www.youtube.com/watch?v=af4eK-gicns&NR=1
assemblage CAO d'un lanceur, sur you yube

11/04/23 30
(t)
(t)
S2
(t)
C
I
O
e
Rayon r
S1
SCHEMA
La vitesse de glissement en I est définie par VI1/2On utilise la composition VI1/2 = VI1/0 + VI0/2 = VI1/0 - VI2/0Il ne faut surtout pas dériver pour trouver les vitesses des point I appartenant aux solides !Il faut utiliser le champ distributif des vecteurs vitesses des points d’un solide (équiprojectivité)VI1/2 = [ VO1/0 + IO1/0] - [ VC2/0 + IC2/0] VI1/2 = [ O + (- x1 + e y1)°z] - [ VC2/0 + r y1 (°+°)z] VC2/0 = ° x1 + ° y1 - (r-e) ° x1 VI1/2 = ° y1 + e °x1 - [° x1 + ° y1 - (r-e) ° x1 + r (°+°)x1]
VI1/2 = - ( ° + r ° ) x1
x1
x
y

11/04/23 31
(t)
(t)
S2
(t)
C
I
O
e
Rayon r
S1
SCHEMA
La vitesse de glissement en I est définie par VI1/2Mais on aurait pu faire beaucoup plus vite!En remarquant que l’on connait VC2/1 = ° x1 et donc VC1/2 = - ° x1 VI1/2 = VC1/2 + IC1/2 (1/2 = - 2/1 = - ° z)VI1/2 = - ° x1 + r y1 - ° z
VI1/2 = - ( ° + r ° ) x1
VI2/1 = + ( ° + r ° ) x1
Les conditions de roulement sans glissement sont donc : ° = - r °
x1
x
y