-
8/14/2019 Salto Alexander
1/15
Leg Design and Jumping Technique for Humans, other Vertebrates
and InsectsAuthor(s): R. McN. AlexanderSource: Philosophical
Transactions: Biological Sciences, Vol. 347, No. 1321 (Feb. 28,
1995), pp.235-248Published by: The Royal SocietyStable URL:
http://www.jstor.org/stable/55945
Accessed: 21/11/2008 12:00
Your use of the JSTOR archive indicates your acceptance of
JSTOR's Terms and Conditions of Use, available
athttp://www.jstor.org/page/info/about/policies/terms.jsp. JSTOR's
Terms and Conditions of Use provides, in part, that unless
you have obtained prior permission, you may not download an
entire issue of a journal or multiple copies of articles, and
you
may use content in the JSTOR archive only for your personal,
non-commercial use.
Please contact the publisher regarding any further use of this
work. Publisher contact information may be obtained at
http://www.jstor.org/action/showPublisher?publisherCode=rsl.
Each copy of any part of a JSTOR transmission must contain the
same copyright notice that appears on the screen or printed
page of such transmission.
JSTOR is a not-for-profit organization founded in 1995 to build
trusted digital archives for scholarship. We work with the
scholarly community to preserve their work and the materials
they rely upon, and to build a common research platform that
promotes the discovery and use of these resources. For more
information about JSTOR, please contact [email protected].
The Royal Society is collaborating with JSTOR to digitize,
preserve and extend access to Philosophical
Transactions: Biological Sciences.
http://www.jstor.org
http://www.jstor.org/stable/55945?origin=JSTOR-pdfhttp://www.jstor.org/page/info/about/policies/terms.jsphttp://www.jstor.org/action/showPublisher?publisherCode=rslhttp://www.jstor.org/action/showPublisher?publisherCode=rslhttp://www.jstor.org/page/info/about/policies/terms.jsphttp://www.jstor.org/stable/55945?origin=JSTOR-pdf
-
8/14/2019 Salto Alexander
2/15
Leg design and jumping technique for humans, othervertebrates
and insectsR. McN. ALEXANDERDepartmentf Pure andAppliedBiology,
University f Leeds,LeedsLS2 9JT, U.K.
SUMMARYHumans, bushbabies, frogs, locusts, fleas and other
animals jump by rapidly extending a pair of legs.Mathematical
models are used to investigate the effect muscle properties, leg
design and jumpingtechnique have on jump height. Jump height
increases with increased isometric force exerted by legmuscles,
their maximum shortening speeds and their series compliances. When
ground forces are smallmultiples of body mass (as for humans),
countermovement and catapult jumps are about equally high,and both
are much better than squat jumps. Vertebrates have not evolved
catapult mechanisms and usecountermovement jumps instead. When
ground forces are large multiples of body mass, catapult jumps(as
used by locusts and fleas) are much higher than the other styles
ofjump could be. Increasing leg massreduces jump height, but the
proximal-to-distal distribution of leg mass has only a minor
effect. Longerlegs make higherjumps possible and additional leg
segments, such as the elongated tarsi of bushbabies andfrogs,
increase jump height even if overall leg length remains unchanged.
The effects of muscle momentarms that change as the leg extends,
and of legs designed to work over different ranges of joint angle,
areinvestigated.
1. INTRODUCTIONA wide variety of animals, including humans,
makestanding jumps by rapidly extending a pair of legs.Species that
have been studied include fleas (Bennet-Clark & Lucey 1967),
locusts (Bennet-Clark 1975),frogs (Calow & Alexander 1973;
Hirano & Rome1984; Lutz & Rome 1994) bushbabies and
otherprosimians (Guinther 1985; Gtinther et al. 1991) andhumans
(Bobbert & van Ingen Schenau 1988; Pandyet al. 1990; Dowling
& Varmos 1993). Recognizedadaptations for jumping include long,
muscular legs,sometimes with additional segments formed by
elonga-tion of tarsal bones (frogs, bushbabies) or by mobilityof
the sacro-iliac joint (frogs) (Emerson 1985). At leasttwo
techniques are used to improve jumping per-formance by taking
advantage of elastic elements inseries with the muscles. Humans
make a countermove-ment, bending the legs immediately before
extendingthem. Komi & Bosco (1978) have shown that thisenables
them to jump higher than they otherwisecould. Jumping insects use
catapult mechanisms,storing elastic strain energy and then
releasing itsuddenly to power the jump (Bennet-Clark
1976).Bennet-Clark & Lucey (1967) showed that the jumpsof small
insects require much higher power outputs perunit mass than any
known muscle can provide.Catapult mechanisms enable work done
relativelyslowly by muscles to be released much more rapidly
attake-off.The aim of this paper is to improve our under-standing
of leg design in jumping animals and of thetechniques used for
standing jumps. How does jumpperformance depend on muscle
properties, on thedistribution of mass in the legs and on the
number ofPhil. Trans. R. Soc. Lond. B (1995) 347, 235-248Printed in
Great Britain
leg segments? To what angle should the joints bend,
inpreparation for a jump? Can an advantage be gainedby having
muscles whose moment arms change, as thejoint extends? In what
circumstances can a counter-movement improve a jump and when will a
catapultmechanism be more effective?These questions will be tackled
by mathematicalmodelling. A model will be described that is
generalenough to be applied to jumpers of all sizes and taxa;from
fleas to humans. Muscle properties, other aspectsof leg design and
jumping technique will be varied andthe effects on jump height
determined. Only verticaljumps will be considered.2. THEORY(a)
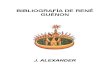
Model with two leg segmentsThe model used for most of the
calculations is shown infigure 1a. It jumps by extending its legs.
The jump ispowered by knee extensor muscles which exert
equalmoments about the two knees: the properties of thesemuscles
are described in ?2c. The model starts fromrest and its symmetry
ensures that the jump is vertical.Each leg consists of two
segments, each of length s.The point of contact of each foot with
the ground isvertically below the corresponding hip, and at time
tthe angle of each knee is 20. The hips are at height yfrom the
ground and the knees are x lateral to them.Thusy = 2s sin0,y = 2sB
cos0,x = s' os 0,x = - s' sin 0 = - y' tan0,and from equation 20 =
(' sec0)/2s.
(1)(2)(3)(4)(5)
? 1995 The Royal Society35
-
8/14/2019 Salto Alexander
3/15
236 R. McN. Alexander Leg design andjumping technique(c)
force, Fm, F,, iso2-
- 0.5 0 0.5 1.0rate of shortening ( - a / amax
Figure 1. Models of bipedal jumperswith: (a) two segments; and
(b) three segmentsin each leg. (c)The force-velocityrelationshipfor
the models' muscles,describedby equations (22). The force
isexpressedas a multiple of the isometricforce (i.e. as F/Fm iso)
and the rate of shortening as a multiple of the maximum shortening
speed (as -?d/max).We will obtain an equation of motion by
consideringenergy balance. At time t, the knee muscles are
exerting moments T about the knees, each of which isextending at
a rate 20. The rate at which the kneemuscles are doing work must
equal the sum of the ratesof increase of the potential energy P and
kinetic energyK of the model4T0 =P+K. (6)
The trunk has mass m1, the two thighs together m2and the two
lower legs together m3. Each leg segmentis a uniform rod, so its
centre of mass is midway alongits length. Thus these centres of
mass are at heights3y/4, y/4, and the potential energy of the model
isP = (gy/4) (4m, + 3m2+ m3), (7)(g is the gravitational
acceleration). The equationimplies that the centre of mass of the
trunk is at theheight of the hip joints, but this assumption has
noeffect on the analysis because we will be using thederivative of
the potential energy, rather than thepotential energy itself.The
trunk moves vertically with velocity y. Thecentres of mass of the
thighs and lower legs havevertical components of velocity 3//4,y//4
and hori-zontal components +?/2, ?+/2. Each thigh hasmoment of
inertia m2 2/24 about its centre of mass, andangular velocity + 0:
and each lower leg has moment ofinertia m3s2/24 and the same
angular velocity. Thusthe total kinetic energy of the model isK =
(2/32) (16m +9m2+m3) + (2/8) (m2+ m3)
+ (s202/24) (m2+ 3),=(2/24) [12m + 7m2+m3+tan20(m2+m3)], (8)
(using equations (4) and (5) to substitute for x and 6and
remembering that sec2 0 = I + tan2 0)It will be convenient to
writem4= m2+ m3, (9)
m5= 4m1+ 3m2+ m3m =- 12m + 7m2 + m,so that equations (7) and (8)
becomeP = gym5/4,K = (y2/24) (m6+ 4tan2 0).By differentiating with
respect to timeP = g9m5/4,K= (yy/12) (m6+ m4 tan2 o)
+ (g2/24) (2m46 an 0 sec2 0).By substituting equations (14) and
(15) in (6),using (5) to eliminate 62 Tsec 0/s = gm5/4+ (y/ 12) (m+
m4 an2 0)
+ (mi4 2/24s) tan 0sec3 0,y = (48 Tsec 0-6m5 gs- m4 2 tan 0 sec3
0)
/[2s(m6 + m4tan2 0)].
(10)(11)
(12)(13)
(14)(15)and
(16)This equation is used to calculate the motion of themodel
during take-off. The height y of the hips isobtained by numerical
integration and from it the kneeangle 20 by using equation (1). The
force Fg on theground is the sum of the weight of the body and
theforces needed to give the segments their verticalcomponents of
acceleration(17)g= mg+m5 /4,
where m is the total mass of the bodym = m +m2+m3.
When y > 2s or Fg< 0, the feet have left the ground.At the
instant when they leave the ground, y = yoff andy = Soff' The
centre of mass of the model is thenrising at a rate m5yOff/4m(this
is P/mg, equation (14)).A projectile fired vertically with velocity
v rises to aheight v2/2g, so the centre of mass will rise
bym5yoff/32m2g after the feet have left the ground. If thePhil.
Trans. R. Soc. Lond. B (1995)
(18)
(a) (b)
-
8/14/2019 Salto Alexander
4/15
Leg design andjumping technique R. McN. Alexander 237joints
remained fixed at the angles they had when thefeet left the ground,
the hips would rise to a heightYoff m5yoff/32m2g at the peak of the
jump. However,they will rise a little higher if the legs
becomecompletely straight, moving the centres of mass ofthighs and
lower legs distances (2s-yoff)/4 and3(2s-yoff)/4 further below the
hips. Thus the dif-ference of height between the hips and the
centre ofmass of the whole body is increased by(m2+3m3)
(2s-yo,,)/4m. The height of the jump,defined as the height of the
hipjoints above the groundat the peak of the jump, is thush = yoff
+ (mnyo2f/32m2g) + (m2+ 3m) (2s-yOff)/4m. (19)(b) Model with three
leg segments
Some calculations will be presented for the modelshown in figure
1b, which has three segments in eachleg instead of two. These are a
thigh of length s/2, ashank of length s and a metatarsal segment of
lengths/2. The distributionof massalong the length of the legis the
same as for the previous model; thus the thighand metatarsal
segment are uniform rods of massesm2/4,m3/4 and the shank
consistsof two uniformrods,each of length s/2, joined end to end;
the proximalhalfof the shank has mass m2/4 and the distal half
m3/4.The twojoints in each leg are constrained always tohave equal
angles, perhaps by a parallel rule mech-anism (not represented n
the diagram). The muscularmoment T may all be applied at one of the
joints, inwhich case a moment is transmittedto the other by
thelinking mechanism. Alternatively, moments totallingTmay be
applied to the twojoints by separatemuscles.The mathematical
analysis is the same, in either case.The equation of motion can be
obtained by a similarargument to the one presentedfor the model
with onlytwo leg segments, in ?2a. The more concise argumentthat
follows leads to the same conclusion.Mass in this model is
distributed over height inpreciselythe same way as in the
previousmodel, so atany given hip height y the potential energiesof
the twomodels are equal. Also, at any given hip velocity y
thevertical components of velocity of particles in cor-responding
positions in the two models are equal:therefore, the kinetic
energies associated with verticalcomponents of velocity are equal.
However, particlesin the legs of this model are on average only
half as farfrom the vertical line from hip to foot, as in the
othermodel. Therefore the transverse displacements thatoccur as the
leg straightens are halved, transversecomponentsof velocity are
halved and kinetic energiesassociated with transversecomponents of
velocity areonly one quarter as much as in the previousmodel.
Inequation (13), thesekinetic energiesare representedbythe term in
m4. It follows that we can obtain theequation of motion for the
model with three segmentsin each leg by dividing by four those
termsin equation(16) which include m4. Equivalently, we can
multiplyby four the terms on the right which do not include m4y =
(192TsecO-24m5gs-m4y2 tan 0 sec3 0)/ [2s(4m6 + ,4tan2 0)]. (20)
(c) Muscle propertiesThe extensor muscle which powers the jump
consistsof a contractile element in series with an elasticelement.
Any change 80 in the half-angle of the knee
requires a change 2r 60 in the overall length of themuscle,
where r is the moment arm of the muscle aboutthe joint. This is the
sum of length changes 8a in thecontractile element and 8b in the
elastic element.2r' 80 = 6a+ b. (21)
The contractile element has force-velocity propertiesexpected to
be realistic for striated muscle. Morespecifically, the force Fm
that the muscle exerts isrelated to the rate of change of length a
of thecontractile elementfor -a < 0
Fm= Fm,so[ .8 - 0.8(ma - )/(max + 23a)], (22a)for 0 dmax Fm= 0,
(22c)(see figure I c). Here Fmiso is the force exerted inisometric
contraction and amax is the maximum rate ofshortening of the
contractile element. Equation (22b)is Hill's (1938) equation for
muscle shortening, withsome signs changed because shortening is a
negativelength change. Similarly, equation (22a) is Otten's(1987)
equation for stretching of active muscle. Inthese equations, the
constant describing the curvatureof the force-velocity relationship
(a/Po in Woledge et al.1985; k in Otten 1987) is given the value
0.33. Thisvalue is typical for fast skeletal muscle (Woledge et
al.1985).The elastic element is a linear spring of complianceC,
which undergoes extension b when force Fmacts onitFm = bC. (23)At
every stage in take-off, the forces given by equations(22) and (23)
must be equal.We will see, in section 5 (a), how forcible
stretchingof the muscle in a countermovement can enable it toexert
increased force in a subsequent contraction. Thisresults from
interaction of the series compliance withthe force-velocity
properties of the contractile ele-ments. No attempt is made in the
model to reproducean additional effect of an initial stretch,
'potentiation'of the contractile machinery itself. This effect
seemsrelatively unimportant (Ettema et al. 1990).The moment arm r
is related to the angle 20 of thejoint by the equationr = ro[l +
(6k/() (0-1/3)]. (24)When k = 0 (as in most of the calculations
that will bepresented) the moment arm has a constant value ro.When
it has other values, the moment arm changeslinearly from ( - k)
rowhen 0 = r/6 to (1 + k) rowhen0 = n/2. Note that the mean moment
arm, over thisrange, is always ro. In most of the simulations
presentedin this paper, including all those in which r varies,
theminimum value of 0 is 71/6. When the leg is fullyextended, 0 =
n/2.
Phil. Trans.R. Soc.Lond.B (1995)
-
8/14/2019 Salto Alexander
5/15
238 R. McN. Alexander Leg design andjumping techniqueThe moment
T exerted by the extensor muscleabout the joint is
T= Fmr.Thus the unit of time is (s/g) . The followingparameters
will be used to describe muscle properties:
(25) the isometric force parameter
3. COMPUTATIONThe equations given above were incorporated in
aprogram run on a desk-top computer. This simulatedjumps starting
from rest, following the model's move-ments by numerical
integration until the feet left theground. Equation (16) or (20),
as appropriate, wasused to calculate the changes of velocity y and
hipheight y during each time increment. Hence joint anglewas
calculated using equation (1). The increment ofjoint angle was
partitioned between the contractile andseries elastic elements of
the muscle by stipulating thatthe muscle forces given by equations
(22) and (23)must remain equal. The force so obtained was used
asthe muscle force for the next time increment.
Integration ceased when the force on the ground(equation (17))
fell to zero. The height of the jump wasthen calculated, using
equation (19). Halving the timeincrements in a sample of runs
altered jump heights byless than 1 o.Simulations were performed for
three jumpingtechniques. In the following description, 20min is
theminimum angle to which the knee bends in preparationfor the
jump.1. Squat jumps. The simulation starts at rest, withknee angle
20min. Initially force Fm s zero and the kneeis prevented from
bending further by a passive stop asoccurs, for example, when a
person is squatting withthe posterior surface of the thigh resting
on the calf.The muscle is activated and contracts, stretching
theseries elastic elements and building up a moment. Nomovement
occurs until the acceleration given byequation (16) or (20) becomes
positive, at whichinstant the legs start extending.2. Catapultumps.
Again, the model is initially at restwith knee angle 20min. The
muscle is active, exerting itsisometric force Fm iso, but the joint
is prevented fromextending by some other means. For example, the
kneeextensor muscle in locusts develops tension prior to ajump,
while extension is prevented by an antagonist(Bennet-Clark 1975).
The joint is suddenly released (inlocusts, the antagonist relaxes
very rapidly) and take-off starts.3. Countermovementjumps. The
model is initially atrest with the legs straight and the muscle
inactive. Itfalls for a while under gravity according to
equation(16) or (20), with Fm fixed at zero. At some stageduring
its fall, the muscle is suddenly activated. Amoment is developed at
the knee, decelerating the falland then accelerating the model
upwards to take off.The time at which the muscles are activated is
variedin successive trails to find by trial and error the
timerequired to make the minimum knee angle reached inthe
simulation equal the chosen value 20min.The results obtained in
this study will be presentedin dimensionless form using body mass m
as the unit ofmass, leg segment length s as the unit of length
andgravitational acceleration g as the unit of acceleration.
(26)m,.iso Fm so o/gs,the shortening speed parameterdmax=
(amax/o) (S/g),and the compliance parameterC= CFm,iso/ro.
(27)
(28)4. VALUES FOR PARAMETERSThe models presented in this paper
are designed tothrow light on jumping by animals ranging fromhumans
to small insects. Our choice of parameters willbe guided
principally by data for humans (body massapproximately 70 kg),
bushbabies (Galago senegalensisand moholi, 0.3 kg) and locusts
(Schistocercagregaria,2 g).The total mass of the two thighs is 20
?/ of body massboth in humans and in Galago (Winter 1990;
Grand1977). The mass of the two lower legs and feet is 12 ?/of body
mass in humans and 10% in Galago (samesources). A reasonably
realistic model of jumpingmammals can therefore be obtained by
taking m=0.7m, m2= 0.2m and m3=0.1m; these segment masseshave been
used except where it is stated otherwise.Note, however, that at
least some insects have relativelylighter legs. The two femora of
Schistocerca otal only140% of body mass and the two tibiae and
tarsi only3 ? (Bennet-Clark 1975).The minimum knee angle, in the
countermovementprior to jumping, is about 75? in humans (Bobbert
&Van Ingen Schenau 1988) and 30? in Galago (Gunther1985). An
intermediate value of 60? will be used as theminimum knee angle
(20m,,) in this study, except whenthe effects of varying this angle
are being investigated.Note that the chosen angle is much too large
to berealistic for Schistocerca,which bends the knee almost to0? in
preparation for jumping (Heitler 1977).Peak ground forces in
standing jumps are generally2-3 times body mass for humans (Dowling
& Vamos1993), up to 13 times body weight in Galago
(Gunther1985), about 18 times body weight in
Schistocerca(Bennet-Clark 1975) and up to at least 135 times
bodyweight in fleas (Bennet-Clark & Lucey 1967). Isometricforce
parameters Fm iso of one, five and 25, respectively,will be used in
simulations designed to represent jumpsby humans, bushbabies and
insects. When the musclesexert these forces at knee angles (20) of
60?, the groundforces (exerted by the two feet together) are 2.3,
12 and58 times body weight, respectively. The peak forcesexerted in
simulated jumps may be somewhat more orless than these values,
depending on the jumpingtechnique (see figure 2).
Maximum shortening speeds of muscles are usuallyexpressed in
terms of muscle fascicle lengths per second.To select realistic
values of dmax for investigation, wemust first estimate the resting
length of the musclefascicles. In most of the simulations, the knee
willextend from a minimum angle of 60? so its workingrange, from
the minimum to full extension, is 120? orPhil. Trans.R. Soc. Lond.B
(1995)
-
8/14/2019 Salto Alexander
6/15
Leg design andjumping technique R. McN. Alexander 2392.1
radians. A muscle with a moment arm ro, movingthe joint through
that angular range, must shorten by2.1 r0. Studies of rabbit leg
muscles (Dimery 1985) andbird wing muscles (Cutts 1986) indicate
that theworking range of length of muscles is commonly aboutone
quarter of the resting length, so a muscle requiredto shorten by
2.1 ro can be expected to have fasciclesabout 8.4ro long. For a
muscle shortening at e lengthsper second, the shortening speed can
thus be estimatedas 8.4roe.In this paper, muscle shortening speeds
are repre-sented by the dimensionless parameter (a/ro) (s/g)which,
by the argument of the previous paragraph,equals 8.4U(s/g)2. Leg
segment length s would be about450 mm for humans, 66 mm for Galago
(Grand 1977)and 25 mm for Schistocerca(Bennet-Clark 1975).
Thecorresponding values of (s/g)2 are 0.21 s for humans,0.08 s for
Galago and 0.05 s for Schistocerca.
The maximum shortening speed for fast fibres fromhuman deltoid
muscles is 4.9 lengths per second (less intrained swimmers; Fitts
et al. 1989), and it seems likelythat knee extensor muscles would
be about equally fast.I have no data for bushbaby muscle, but
bushbabiesare similar in mass to rats in which a fast leg
muscle(extensor digitorum longus) has a maximum short-ening speed
of about 15 lengths per second (Woledge etal. 1985). These data
give shortening speed parameters(8.4e(s/g)2, see above) of nine for
humans and ten forbushbabies. However, Tihanyi et al. (1982) give
themaximum shortening speed of human knee muscles interms of the
angular velocity of the knee, as 18 rad persecond for subjects with
predominantly fast fibres. Thisis dmax/ro, implying that the
shortening speed par-ameter is only 18 x 0.21 = 4. These data
indicate thatthe parameter is likely to be in the range 4-10,
forhumans and bushbabies. Most of the graphs in thispaper show data
for a shortening speed parameter of 8,but the effects of variations
in the range 2-32 havebeen investigated.
Orthopteran wing muscles have maximum short-ening speeds up to
16 lengths per second (Josephson1984). If locust knee extensor
muscles were as fast asthis, their shortening speed parameter would
be8.4 x 16 x 0.05 = 7, about the same as for humans andbushbabies.
The shortening speed seems actually to bemuch lower than this,
about 1.8 lengths per second(Bennet-Clark 1975), giving a
shortening speed par-ameter of only 0.8. It seems probable that
theparameter is also small for smaller insects. For a flea,segment
length s, would be of the order of 1 mm,making (s/g)2 about 0.01 s.
The fastest muscles thathave been investigated have shortening
speeds of about25 lengths per second (Woledge et al. 1985). Even
withmuscles as fast as this, the shortening speed parameterof a
flea would be only 8.4 x 10 x 0.01 = 1.7. For someof the insect
simulations, the parameter will be given avalue of 1.We must take
account of the force the muscle canexert, in selecting values for
series compliance. Sarco-meres are stretched about 1.5 / by their
isometricforce (Huxley & Simmons 1971). Thus the lowestlikely
value for the series compliance of a muscle oflength 8.4r, (see
above) is 0.015 x8.4rO/Fm, so=
0.13ro/F, io. At the other extreme, we may imagine amuscle whose
tendon stretched elastically by 2.1 ro (ourestimate of the muscle's
working range of length) whenthe muscle exerted its isometric
force. In that case thecompliance would be 2.1r/Fmi,,o. Results
will bepresented for compliance parameters CFm,s,/r rangingfrom
0.125 to 2.The strain energy stored by elastic structures prior
tothe jump in locusts exceeds the energy of the jump,implying that
the compliance parameter is a little morethan 2 (Bennet-Clark
1975). Realistic values formammals are harder to estimate.
Isometric muscleforces impose stresses around 50 MPa on
highly-stressed tendons such as the human gastrocnemius(Ker et al.
1988), stretching them by about 4 % of theirlength (see figure 1.6
in Alexander 1988). Suppose thatthe total length of tendon or
aponeurosis in series witheach muscle fascicle is twice the length
of the fascicle,a value within the commonly found range for
pennatemuscles. Then if the length of the fascicles is 8.4ro
(asalready estimated) the extension of the tendon is2 x 8.4 x
0.04ro = 0.7ro and the compliance parameteris 0.7.
5. RESULTS AND INTERPRETATIONThis section presents results and
tries to explain inwords why the mathematical models behave as
theydo. Discussion of the light thrown by the models on thedesign
and jumping techniques of real animals isdeferred to the next
section.
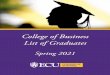
(a) Predicted forcesFigure 2 shows sample simulations, one for
each ofthe three jumping techniques. The chosen isometricforce
(1.Omgs/ro) gives peak ground forces in the range2-3 mg which is
typical of human jumping.Figure 2 a shows a squat jump. Initially,
the force onthe ground equals body mass and the muscle isinactive.
At time, t = 0, the muscle is activated and itscontractile element
starts to shorten, stretching theseries elastic element and
building up tension. By t =0. 14(s/g)2 it is exerting enough moment
to startextending the knee. The muscle force continues to riseas
the series elastic elements are stretched further: butnever reaches
the isometric value because the con-tractile elements are
shortening throughout take-off.Later, the muscle force falls
because the contractileelements' rate of shortening is increasing,
allowing theseries elastic elements to recoil. Eventually, the
muscleis exerting too little moment to maintain the
angularacceleration of the leg segments that would be neededto keep
the feet on the ground while the trunkcontinues to rise. The feet
leave the ground at a kneeangle (in this simulation) of 146?.Figure
2b represents a catapult jump. In this casethe muscle is active
from the start, exerting its isometricforce, and the series elastic
element is correspondinglystretched. The knee is prevented from
extending untilt = 0, when it is suddenly released. The force on
the
ground rises abruptly and the body accelerates to take-off. As
the knee extends, the series elastic elementsPhil. Trans.R. Soc.
Lond.B (1995)
-
8/14/2019 Salto Alexander
7/15
(a)anglegroundmuscleforce force(b) (c)
% groundI \ force1I^ \
I muscle iI force
angle" , ,
0 10 -1 0 1time time timeFigure2. Examplesof simulatedjumps: (a)
representsa squatjump; (b) a catapult jump; and (c) a
countermovementjump. The force exerted on the ground (expressed as
F/mg), the force exerted by the knee extensor muscles(expressedas
Fm/Fm,o) and the knee angle (20) are plotted against the time
parameter t(g/s)05. These arejumps bythe model with two-segment
legs (see figure 1a) with muscles exerting human-like forces
(isometricforce parameterFn o= 1.0). The shortening speed parameter
d,mais 8, the compliance parameter C is 1.0 and segment masses
arem1= 0.7m, m2 = 0.2m, m3= 0.1m.
(b) (c)16
-3C)
14I 2
.1 2 - 2.2
i . 0 .. ---0.125 0.25 0.5
16uc 8.5.S 4E
._ 2x' 2 0 1 - I I .,1 2 0.125 0.25 0.5 1
compliance compliance
4-' 8 )X20\
1510
2 I'aiI I l2 0.125 0.25 0.5
complianceFigure 3. Contour plots showing the dependence of jump
height on the maximum shortening speed of the musclesand their
seriescompliance: (a) refers to countermovementjumps with
human-likeforces (isometricforce parameterF iso= 1); (b) to
countermovementjumps with bushbaby-like forces (F iso= 5); and (c)
to catapult jumps withinsect-likeforces (Fm,,o= 25). The axes show
the shorteningspeed parameteramax nd the compliance parameter C,and
the contours give relative jump height his. The legs have two
segments, and segment masses are m, = 0.7m,m2= 0.2m and m3= 0.lm,
throughout.
recoil, the contractile elements shorten progressivelyfaster and
the muscle force falls.Figure 2c represents a countermovement
jump.Initially the leg is straight; the muscles are inactive butthe
feet rest on the ground exerting a force whichdiminishes as the
body falls under gravity. The legbends until, at t = 0 (when the
knee angle, in thisexample, is 96?), the muscles are activated.
Tensionbuilds up and the fall is decelerated until at t=0.8(s/g)2
(in this example), when the knee angle is 60?,
the fall is halted and the body begins to rise again.Immediately
prior to this the muscle was beingstretched and the force in it had
risen a little above theisometric value (to 1.08Fm,is). In the very
early stagesof knee extension, the force is still above the
isometricvalue: the contractile elements are still being
stretchedbut the series elastic elements are shortening faster
(by
elastic recoil) and the muscle, as a whole, is shortening-
extending the knee. Only when the elastic recoil hasproceeded far
enough for the muscle force to dropbelow F, iso do the contractile
elements begin toshorten.
(b) Effects of muscle propertiesFigure 3 shows how the height of
ajump depends onthe maximum shortening speed of the muscles and
the
series compliance: (a) for human-like ground forces;(b) for
bushbaby-like ground forces; and (c) for insect-like ground forces.
The simulations are of counter-movement jumps in figure 3 a, b and
a catapult jump infigure 3 c, in accordance with the jumping
techniquesused by humans, bushbabies and insects,
respectively.Comparison of figure 3 a and 3 b shows, as
expected,Phil. Trans.R. Soc. Lond.B (1995)
240 R. McN. Alexander Leg design andjumping technique
1800 -
2
120 -
- 1.0
- 0.5
60? n .
(a)
2
1
i
-
8/14/2019 Salto Alexander
8/15
Legdesignand umping echniqueR. McN. Alexander 241
// catapult
countermovt.
- --' ~ sqjuat
I I II I .t.. .1$1ta10tI I O t t,0.125 0.25 0.5 1 2 0.125
0.25compliance
0.5compliance
1 2 0' ,,["0.125 0.2: 0.5
compliance1 2
Figure 4. A comparison of threejumping techniques. In each graph
relativejump height h/s is plotted against thecompliance parameter
C, for: (continuous line) squat jumps; (short dashes)
countermovement jumps; and (longdashes) catapult jumps. Isometric
forces are (a), human-like (Fm = 1); (b), bushbaby-like (Fmo = 5);
and (c),insect-like (Em,iso 25). In every case the shortening speed
parameter imaxs 8 and segment masses are m1= 0.7m;m2= 0.2m; and m3
= 0.lm. The legs have two segments.that larger muscle forces give
higher jumps. Both thesegraphs refer to countermovement jumps, but
isometricforce (expressed as a multiple of body mass) is larger inb
than in a, and jump heights (as multiples of leglength) are also
larger. Examination of the contours oneach graph shows that for
constant isometric force,faster muscles and higher compliances
given higherjumps. Faster muscles can exert more force, at
givenrates of shortening. Series elastic elements can shortenby
elastic recoil at unlimited rates. Also, series elasticelements
make it possible for muscle forces that aregreater than the
isometric force, developed during acountermovement, to persist into
the early stages of legextension. This was explained in ?5a.By how
much might increased compliance beexpected to improve jump height?
In many cases, thepeak force exerted by the muscles during takeoff
isclose to their isometric force F, iso (see figure 2). Thisforce,
acting on compliance C, stores strain energy-F 2iC in each leg, a
total of Fz C. By equations(26) and (28) this equals Fmiso Cmgs,
enough to raisethe animal's centre of mass by F.,so Cs. Thus if all
thestored strain energy were converted to gravitationalpotential
energy in the jump, an increase in C from0.125 to 2 (the range
investigated in figure 3) wouldimprove jump height by 1.9s when
Fm,iso = 1; by 9.4swhen Fmso= 5; and by 47s when F so = 25.
Theimprovements predicted by the model are substantiallyless than
this, as can be seen by comparing jumpheights for compliance
parameters of 0.125 and 2, forany chosen value of the shortening
speed parameter, infigure 3a, b or c. Reasons for this include peak
forcesbeing less than isometric for squat jumps (see figure 2 a)and
some countermovement jumps; and to someenergy being required to
give kinetic energy to the legs(see ?5d).In countermovement jumps
(see figure 3a, b) jumpheight is more sensitive to the speed of the
muscles than
to the series compliance: an increase of (say) 10 % inmuscle
shortening speed generally increases jumpheight more than a 10%/
increase in compliance. Incatapult jumps (see figure 3 c), however,
jump height ismore sensitive to compliance than to the speed of
themuscles, except when compliance is very low.The catapult jumps
of figure 3c involve much largerisometric forces (relative to body
mass) than do thecountermovement jumps of figures 3a, b. The
state-ments of the previous paragraph nevertheless remaintrue, when
comparisons are made between counter-movement and catapult jumps
with equal isometricforces.
(c) Comparison of jumping techniquesFigure 4 shows results of
simulations of the threejumping techniques, with the isometric
muscle forceschosen to represent: (a) human jumping; (b)
bushbabyjumping; and (c) insect jumping. Results are shown ineach
case for a range of series compliances, for onemaximum shortening
speed.With zero series compliance, the three techniqueswould give
jumps of identical height for the followingreasons. In a squat
jump, muscle force would riseinstantaneously to the isometric value
when the musclewas activated; and in a countermovement jump,muscle
force would fall to the isometric value at the
instant when the knee ceased bending and started toextend. Thus
knee extension would start in every casewith 0 = Omin, = 0 and m =
Fm,isoAs compliance increases, all three techniques givehigher
jumps but squat jumping is less successful thanthe others because
muscle force is less than the isometricvalue when knee extension
starts. The relative merits of
catapult and countermovement jumping depend onthe isometric
force. In the human simulations the twotechniques give similar jump
heights (see figure 4a).
Phil. Trans.R. Soc. Lond.B (1995)
(a) (b)10.0
.1 2.5Io
(c)40 -
squat
catapult//
countermovt.
_ 0 squat
30 -
5 20
10
-
8/14/2019 Salto Alexander
9/15
242 R. McN. Alexander Leg design and umping technique(a)
3.5
3.0istk52.5
2.5
(b)10
zJP5.I
(c)50
40
30
20
10
2.0 . ' I 0 I i I 1 0 1 X 10.125 0.25 0.5 1 2 0.125 0.25 0.5 1 2
0.125 0.25 0.5 1 2compliance compliance compliance
Figure 5. The effects onjump height of the mass and structureof
the legs. Relativejump height h/s is plotted againstthe compliance
parameter C. Mass distributions are: masslesslegs: m1= m, m2= 0,
m3= 0; insect-like legs: m1=0.83m, m2= 0.14m, m3= 0.03m;
mammal-like legs and 3-segment legs m1= 0.7m, m2= 0.2m, m3= 0.lm;
heavy feetm1= 0.7m, m2= 0.lm, m3= 0.2m.Three segment legs are as
shown in figure 1b; others as in figure 1a. (a) shows theheights of
countermovement umps with human-likeforces ( ,iso= 1.); (b),
countermovement umps with bushbaby-like forces (Fmiso = 5); and
(c), catapult jumps with insect-like forces (m,Jso = 25). The
shortening speed parameterdmax is 8 in all cases.
With moderate compliances, countermovement jumpsare a little
higher than catapult jumps because themaximum muscle forces are
greater than isometric (seefigure 2 c). If the compliance is very
high, however, thepotential energy lost in the body's fall in a
counter-movement is not enough to build up so much force inthe
series elastic elements, and catapult jumps arehigher.In the
bushbaby and insect simulations (see figure4b, c), isometric muscle
force is not attained incountermovement jumps except when the
series com-pliance is very low. Consequently, catapult jumps
arehigher than countermovement jumps over a widerange of
compliances. In the insect case (see figure 4c)a countermovement
gives very little advantage over asquat jump.A simple calculation
will give a rough indication ofthe circumstances in which a
countermovement jumpcan be expected to be higher than a catapult
jump. Insimulations like those offigure 4, in which the minimumknee
angle is 600, the trunk falls a distance s in acountermovement
which starts with the legs straight.The leg segments fall smaller
distances, so the potentialenergy lost in the fall is a little less
than mgs. When amuscle is exerting its isometric force, strain
energyCFU iso is stored in its series elastic element. For
thepotential energy lost to supply enough strain energy toraise the
force in the series elastic elements of bothmuscles to Fm,smgs >
CFm,iso,C < 1/F, iso. (29)
The right-hand side of this inequality is 1.0, 0.2 and0.04 for
the human, bushbaby and insect simulations,respectively. These are
the maximum values of thecompliance parameter C at which
countermovementjumps might be expected to be higher than
catapultjumps. However, it should be noted that some of thestrain
energy may be supplied as work done by the
muscles, especially if the maximum shortening speed ishigh.(d)
Mass distribution in the legs
Figure 5 compares jumps by animals with differentdistributions
of mass in their legs. As in previousfigures, the isometric forces
have been chosen torepresent: (a) humans; (b) bushbabies; and (c)
insects.In each case, the highest jumps were achieved whenthe legs
were given no mass. Mass in the legs reducesthe height of the jump
because some of the work doneby the muscles is required to provide
internal kineticenergy (energy associated with movement of parts
ofthe body relative to the centre of mass). Unlike theexternal
kinetic energy (associated with movement ofthe centre of mass),
this energy does not becomepotential energy as the animal rises to
the peak of thejump, so does not contribute to the jump's
height.Some of the internal kinetic energy is associated
withdifferences in the vertical component of velocity attake-off,
between the leg segments and the trunk (seediscussion of the effect
of foot mass on jumping,Alexander 1988). The rest is due to the
horizontalcomponents of velocity given to parts of the legs, as
thelegs straighten in take-off.The total mass of the legs seems
more importantthan the distribution of mass within the legs.
Amammal-like mass distribution, with the thighs twiceas heavy as
the lower leg ('mammal-like', figure 5a)gives only slightly higher
jumps than when the massesof thighs and lower legs are reversed
('heavy feet').This seems to be due to the part of the internal
kineticenergy at take-off due to transverse components ofvelocity
being larger than the part due to differences invertical velocity.
The former part is the same for bothmass distributions (for given
trunk velocity) but thelatter part is greater when the lower leg is
the heaviersegment.
Phil. Trans.R. Soc.Lond.B (1995)
-
8/14/2019 Salto Alexander
10/15
Legdesignand umping echnique R. McN. Alexander 243
10leg length2 _
leg length2
1 *5 L _51'. 505
00.12... I .- I 0 I25 0.25 0.5 1 2 0.125 0.25 0.5
.. 0 ' I '1 2 0.125 0.25 0.5compliance compliance compliance
Figure 6. The effect of leg length on jump height. In each
graph, relative jump height h/s, is plotted against thecompliance
parameter C for three different relative leg lengths s'/s: (a)
refers to countermovement jumps withhuman-like forces ( = 1); (b)
to countermovement jumps with bushbaby-like forces (Fm,iso 5); and
(c) tocatapult jumps with insect-like forces (F ,iso = 25). Other
details are as in figure 4, and as explained in the text.
The leg segments of jumping insects such as locust?are much
smaller fractions of body mass than are thoseof humans and
bushbabies (see ?4). Figure 5c showsthat even their mass reduces
jump height appreciably,in comparison with hypothetical massless
legs.(e) Number ofjoints
Figure 5a, b also shows results for a model withthree-segment
legs (figure 1b). This jumps higher thanthe mammal-like two-segment
model although it hasthe same distribution of mass along the legs.
Thereason is that the joints of the three-segment leg areinitially
closer to the vertical line through the hip.Therefore, the
transverse displacements and transversevelocities that occur, as
the leg straightens, are smallerfor the three-segment leg. It was
shown in thederivation of equation (20) that at the same
verticalvelocity y, the kinetic energy associated with
transverseleg movement is only one quarter as much for
three-segment legs, as for two-segment legs.(f) Leg Length
To discover the effect of changing leg length we willcompare
animals with equal masses of leg muscle: thatimplies those with
equal values of Fmiso ro, as F, iso isproportional to the
cross-sectional area of the muscleand (as explained in ?4) r, can
be expected to beproportional to muscle fibre length. The leg
muscles, ofthe animals to be compared, will be capable ofshortening
at equal numbers of lengths per second:hence, as explained in ?4,
they have equal values of&max/ro. Thus we will compare a
standard animal with
leg segments of length s, with an isometric forceparameter F,
iso and a shortening speed parameterdmax; with a modified animal
with legs of length s', withan isometric force parameter Fm,io
(s/s') and a short-ening speed parameter damax(s'/s) (see equations
(26)and (27)). The compliance parameter (see equation(28)) is not
affected by the change of leg length. Jump
height will be expressed as a multiple of the standardleg length
(i.e. as h/s). Because leg muscles are generallymore massive than
the leg skeleton, we will ignore anyincrease of leg skeleton mass
that may be madenecessary by increased leg length.Results are shown
in figure 6, calculated for isometricforces representing : (a)
humans; (b) bushbabies; and(c) insects. In every case, longer legs
give higherjumps.This is partly because longer-legged animals start
ajump with the centre of mass higher above the ground.When the feet
are on the ground with the knees bent at60? (the starting angle in
every case, in figure 6) thehips and centre of mass are a height
1.0s above theground when relative leg length s'/s is 1.0, but
2.0sabove the ground when s'/s = 2.0. In addition, longerlegs
enable the animal to accelerate over a greaterdistance, so the
muscles do not have to shorten in soshort a time, to accelerate the
animal to given speed.Their rate of shortening can be lower so they
can exertmore force (see figure 1c) and do more work.Notice that
for catapult jumps simulating those ofinsects (figure 6c), leg
length has little effect on jumpheight when compliance is high. The
reasons are thatjump heights are large multiples of leg length, so
theinitial height of the centre of mass from the ground
isrelatively unimportant; and the work done by elasticrecoil is the
same, whether the recoil is fast or slow.
(g) Moment armsSuppose a given volume of muscle of given
propertiesis required to operate a joint. Anatomical
consider-ations may make it convenient to have a long-fibredmuscle
with a large moment arm, or a short-fibredmuscle with a short
moment arm. But if fibre length ismade proportional to moment arm,
these two musclearrangements will have precisely the same
mechanicaleffect: they can exert the same moment and move the
joint at the same angular velocity (Alexander 1981).Because
muscle volume is assumed constant, longerfibres imply a smaller
physiological cross-sectionalPhil. Trans.R. Soc. Lond.B (1995)
(a) (b)
4
(c)
2 -
40
2a200.5?---
2
-
8/14/2019 Salto Alexander
11/15
244 R. McN. Alexander Leg design andjumping technique
50 -
compliance2.00.5
0.125
40
C" ) max = 2, massless
max --
30 -
20 -
10 -
I I I.0 -0.5 0 0.5 -1.0 I I I-0.5 0 0.5
momentrm actor moment rmactor momentrm actorFigure 7. The effect
of changing moment arms on jump height. Relative jump height h/s is
plotted against themoment arm parameter k (equation 24): (a) shows
the heights of countermovementjumps with human-like forces(F'm so=
1) for threedifferentvalues of the compliance parameterC; (b)shows
the heightsof countermovementjumpswith bushbaby-like forces (Fm so=
5), for the same three values of the compliance parameter; and (c)
shows theheights of catapult jumps with insect-likeforces (Fm i,o =
25) for two values of the shortening speed parameter. In (a)and (b)
the shortening speed parameter is 8. In (c) the compliance
parameter is 2. The legs have two segments.Segment mass are mI =
0.7m, m2 = 0.2m, m3= O.lmexcept in the case of the broken line in
(c), for which m1= m,m2 = m3 = 0.
(a) (b)1.00.8 -
0.6 -0.4 -
0.2n
Imoment rmfactor .5 /1
! I . I, I
1.00.8 -
0.6 -
(c)1.00.8 -
moment rm0.4 -
0.2 -0
0.6 -0.4 -
I/I II III I I
0.2u02 v0.2 0.4 0.6 0.8 1.0 0.2 0.4 0.6 0.8 1.0 0.2 0.4 0.6 0.8
1.0muscleength muscleength muscleength
Figure8. Graphsof muscleforce (Fm/Fm,o) against musclelength,
forselected umps with muscles of zero compliance.Muscle length is
expressedas a fraction of the working range, so that it is zero
when the leg is fully extended and 1.0when the knee is bent to its
minimum angle. (a) and (b) compare jumps with different moment arm
factors k, forjumps with bushbaby-like forces (F, iso = 5) and (a)
slow muscles, dmax 4 and (b) fast muscles dmax 16. (c)compares
jumps with different starting angles 20min for jumps with
human-like forces (Fm,s = 1) and a shorteningspeed parameter of 8.
All graphs refer to two-segment legs with ml = 0.7m, m2= 0.2m, m3=
0. m.
area. For this reason, we will not investigate the effectof
changing the mean moment arm ro.There may, however, be an advantage
in having amoment arm that changes, as the joint extends. This
isachieved in the models by giving the factor k (equation(24)) a
non-zero value. When k is positive the momentarm increases as the
joint extends. The mean momentarm, over the range of knee angles
from 60? to 180?,equals ro for all values of k.Figure 7a shows that
for countermovement jumpswith isometric forces representative of
humans, thelowest values of k give the highest jumps. Figure
7cshows that the same is true of catapult jumps withinsect-like
forces. Figure 7b, however, shows that forcountermovement jumps
with bushbaby-like groundforces, the highest jumps may be obtained
with thehighest values of k (for the higher compliances in this
figure) or with intermediate values (for low compli-ances). In
these simulations, the muscles were given amaximum shortening speed
which is believed to berealistic for small mammals such as
bushbabies (see?4). Simulations with faster muscles gave the
highestjumps for the lowest values of k, as in figure 7a.To explain
these confusing results we must considerboth the force-velocity
properties of the muscles andthe influence of leg mass. To see the
effects of theforce-velocity properties clearly, we will
comparejumps with zero series compliance. As already ex-plained
(see ?5c) such jumps are identical whether asquat, catapult or
countermovement technique is used.In figure 8a, b, muscle force is
plotted against musclelength for jumps with different values of k.
In all cases,the muscle initially exerts its isometric force, but
theforce falls as the muscle shortens at an increasing rate.
Phil. Trans.R. Soc. Lond.B (1995)
(a) (b)10 -.0
' 2.5 :
2.0-1
compliance2.0
__- 0.5
0.125
to.) 5
I I I Ol0.5 0 0.5 - 1.0
C)
0C~SEi
(c
L.
I
n
-
8/14/2019 Salto Alexander
12/15
Legdesignand umping echnique R. McN. Alexander 245(c) amax= 2,
masslessI - - _ _10 50
40
30
Aa M.max 8maxamax=2
20 -
10
0 o0 300 60? 90? 1200 300 60? 90? 1200 300 60? 90?
12(startingngle startingngle startingngleFigure9. The effectsof
starting angle onjump height, when the musclesare adapted to the
starting angle as explainedin the text. Relative jump height hfs is
plotted against starting angle 2mi,, for countermovement jumps
with:(a) human-like; (b) bushbaby-like forces; and (c) catapult
jumps with insect-like forces. Other details are as forfigure
7.
At first it falls faster for negative values of k. This
isbecause negative values of k give moment arms whichare initially
high, requiring the muscle to shorten fasterfor any given angular
velocity of the joint. Later,however, muscle force falls more
slowly for negativevalues of k (for which the moment arm is
decreasing)than for positive values (for which it is
increasing).Consequently, the graphs for negative and
positivevalues of k cross, and the negative values give thehigher
muscle forces in the later stages of take-off.The areas under the
graphs in figure 8 represent thework done by the muscles. In figure
8a the maximumshortening speed of the muscle is low and the
muscledoes 8 ?/ less work for k =-- 1 than for k = + 0.5. Infigure
8 bhowever, a faster muscle does 18 % moreworkfor k = - 1 than for
k = + 0.5. These simulations usedbushbaby-like muscle forces, as
did the simulations infigure 6b in which the maximum shortening
speed ofthe muscles has an intermediate value.
The optimum value of k in countermovement jumpsdepends mainly on
the force-velocity properties of themuscles, though series
compliance also has an effect, asfigure 7 b shows. The heights of
catapult jumps withinsect-like muscle forces and high series
compliancesdepend very little on the force-velocity properties of
themuscles (see figure 3 c), and in such cases we must lookfor a
different explanation of the dependence of jumpheight on k.An
explanation is suggested by a comparison infigure 7c, between the
continuous lines (for legs withmass) and the broken one (for legs
of zero mass). Theformer show lower jump heights for the reason
given in?5 d; some of the work done by the muscles is requiredto
provide internal kinetic energy associated withmovement of leg
segments relative to the centre ofmass. Another difference between
the continuous andbroken lines is that the former show jump
heightdecreasing as k increases, but the latter shows heightsthat
are almost independent of k. The reason that legmass makes jump
height dependent on k is that a major
part of the internal kinetic energy at take-off (repre-sented by
the term m4tan20, in equation (13)) isproportionalto tan20 which
approachesinfinity as theleg straightens. Consequently, less work
is needed toaccelerate the body to a given speed if it reaches
thisspeed while the legs are still considerablybent, than ifit does
not reach it until the legs are almost straight.Anegative value of
k makes the moment arm initiallyhigh, enabling the elasticrecoilof
the seriescomplianceto do most of its work early in the process of
legextension.(h) Joint angles
So far we have assumed that the minimum kneeangle occurring in
the jump (20,,i) is 60?; the workingrange, from this to full
extension, is 120?.We will nowask whether there would be an
advantage in workingover a different range, for example from 0? to
fullextension (a range of 180?) or from 120? to fullextension (a
range of 60?). Assume that the volume ofthe muscle and the
propertiesof its constituent fibresare constant. Then to adapt the
muscle to work over arange of 180? (forexample) instead of 120?,the
lengthof its fascicles should be multiplied by 1.5 and
theirphysiological cross-sectional area by 0.67. Its maxi-mum
shortening rate would then be 1.5 times, and itsisometric force
0.67 times, the values for 120? range.More generally, if the range
is to be multiplied by afactor n, amax is multiplied by n and
F,misos divided byn.Also, if the serieselastic element is to be
stretched bythe same fraction of muscle fascicle length, when
themuscle exertsits isometricforce,the complianceC mustbe
multiplied by n2.These adjustmentswere made in the
calculationsforfigure 9, which shows jump heights for
differentminimumknee angles. Jump height is greaterfor
lowerminimumknee angles except in figure 9a, which
showsintermediate angles giving the highest jumps.Figure 8c will
help us to understand these results.
Phil. Trans.R. Soc.Lond.B (1995)
(a) (b)3.0
to013= 2.5
2.000
-
8/14/2019 Salto Alexander
13/15
246 R. McN. Alexander Leg design and umping techniqueLike the
other parts of this figure it shows muscle forceplotted against
length, for a muscle with no seriescompliance. The greater the
minimum angle, the fastermuscle stress falls as the body
accelerates and the lesswork does the muscle do. (Remember that
work isrepresented by the areas under the graphs.)Our assumptions
imply that the muscle has the samevolume in every case and is, in
principle, capable ofperforming the same amount of work in a
contraction.However, when the minimum angle is larger, thedistance
over which the body has to be accelerated totake-off speed is less,
so it has to be accelerated in lesstime to reach the same speed.
Consequently, themuscles shorten faster and can exert less force,
whenthe minimum angle is high.The argument so far suggests that the
lowestminimum angles should give the highest jumps.However, figure
9 a shows that for jumps with human-like isometric forces a minimum
angle of 40? gives ahigher jump than does one of 0?. The muscles do
22 %less work, but the resulting jump is higher. Theexplanation is
that with a minimum angle of 0? thehips start at ground level, but
if the angle is 400 theystart at a height 2s sin 40 = 0.68s.This
effect can only be significant if jump height isquite small,
compared to leg length. The difference ofstarting height is too
small to counteract the advantageof a very low minimum angle, in
the simulations withbushbaby-like muscle forces (see figure
9b).There is another advantage of low minimum angleswhich has
limited importance in the simulations ofmammal jumps but
predominates injumps with insect-like muscle forces (see figure
8c). This is that the lowerthe minimum angle, the more of the
muscle's work canbe done while the leg is still quite strongly
bent, and thelower the proportion of this work that is lost as
internalkinetic energy. The argument in ?5f, relating to theterm
m4tan20 in equation (13), applies again here.Simulations with
insect-like muscle forces and legs ofzero mass give jump heights
almost independent ofminimum angle.6. DISCUSSIONThe models
presented in this paper are highlysimplified. Their anatomies
resemble those of realanimals only in broad outline. Many
simplifyingassumptions have been made: for example, thatmuscles are
fully activated instantaneously and that, ifthere are several
extensor muscles, they are activatedsimultaneously. These
assumptions were avoided byPandy et al. (1990) in an optimal
control model ofhuman jumping. There is much uncertainty about
thevalues of muscle properties such as maximum short-ening speed
and series compliance, which would berealistic for any particular
species. The results never-theless may help us to understand the
principles ofjumping.They show us that different jumping techniques
areappropriate for animals exerting forces that aredifferent
multiples of body mass. As a general rule,larger animals exert
forces that are smaller multiples ofbody weight (Alexander 1985):
humans making
standing jumps exert forces on the ground of 2-3 timesbody
weight, and fleas over 100 times body weight (see?4). However,
frogs exert maximum forces of onlyabout 3.5 times body weight
(Hirano & Rome 1984).Despite the difference in size between
them andhumans, the maximum forces they exert are not muchgreater,
relative to body weight.Figure 4a tells us that with human-like
muscleforces, countermovement and catapult jumps arehigher than
squat jumps. Humans use the counter-movement technique and healthy
young men jumpabout 5 cm higher with a countermovement than theycan
in a squat jump (Komi & Bosco 1978). For them,leg segment
length s is about 45 cm, so the advantagein jump height that a
countermovement gives is 0. s.This matches the advantage given by
the simulationsfor a compliance parameter of 1.0. It was argued in
?4(admittedly on sparse evidence) that a complianceparameter of 0.7
might be realistic for mammals.Figure 4 b shows that for animals
exerting bushbaby-like forces, catapult jumps could be much higher
thancountermovement jumps, which in turn can be higherthan squat
jumps. Mammals seem not to have evolvedcatapult mechanisms, so the
options available to themare countermovement jumping and squat
jumping.The larger prosimians make a countermovement beforejumping,
as is shown by forces falling below body massin records of jumps by
Lemurcatta (2.4 kg) and Galagogarnetti (0.8 kg: see figure 6 of
Gunther etal. 1991). Thesmall bushbaby Galagomoholisometimes makes
a smallhop which may function as a countermovement, beforejumping
(Ginther et al. 1991).Figure 4c shows that catapult jumping is by
far themost effective jumping technique for animals
exertinginsect-like ground forces. A variety of catapults
haveevolved in insects including the resilin springs of
fleas(Bennet-Clark & Lucey 1967) and the apodemes andsemilunar
processes of locusts (Bennet-Clark 1975).The compliances of these
catapults are high, enough inthe locust for their elastic recoil to
move the kneethrough its whole angular range (Bennet-Clark
1975).Figure 3c shows that for catapult jumps with such
highcompliances, the maximum shortening speed of themuscle makes
little difference to the height of the jump.The knee extensor
muscles of locusts seem to be slow,with maximum shortening speeds
of only 2 lengths persecond (Bennet-Clark 1975). It is probably
inevitablethat they should be fairly slow, as their sarcomeres
arelong, with 5.5 jum-thick filaments. They exert highisometric
stresses, of about 0.7 MPa. Muscles with longthick filaments can
exert high stresses because largenumbers of cross-bridges connect
each thick filament toa neighbouring thin one, but they tend to be
slowbecause high cross-bridge cycling rates are needed tomake the
muscle contract at any given strain rate(Ruigg 1968). The long
sarcomeres of locust kneeextensor muscle allow it to exert high
stresses, enablinga given volume of muscle to do a large quantity
of workas it shortens to deform the catapult springs. The
goodeffect of this on jump performance must far outweighthe small
disadvantage of the muscles' being slow.Figure 5 shows that jump
height is reduced by heavylegs. However, if the jump is powered by
a leg muscle
Phil. Trans. R. Soc. Lond. B (1995)
-
8/14/2019 Salto Alexander
14/15
Leg design andjumping technique R. McN. Alexander 247(as in
locusts) that muscle must be large to power astrong jump, and the
leg cannot be very light.Comparison of the simulations with
mammal-like legproportions in figure 5a with those with thigh
andlower leg masses reversed shows that the total mass ofthe leg
influences jumping ability more than thedistribution of the mass.
This is in contrast to running,for which it is particularly
important that the distalparts of the limbs should be light, to
minimize thekinetic energy required for each forward or backwardleg
swing (Fedak et al. 1982). Jumping vertebrates donot have the very
light feet found in ungulates.The finding that legs with more than
two segmentsmake higher jumps possible is striking (see figure5a,
b). It seems to throw light on the evolution of theelongated tarsal
bones of bushbabies and frogs (illu-strated in Rogers 1986) which,
in effect, add a segmentto the lower leg. The long ilia of frogs,
with theirmoveable iliosacral joints, add a further
functionalsegment to frog legs.When humans jump, the forefoot
presses on theground and the heel rises off the ground, so
themetatarsals form an additional short leg segment. Theimportance
of this was stressed by Bobbert & vanIngen Schenau
(1988).Figure 6 shows that longer legs can be expected tomake
higher jumps possible. Accordingly, manyjumping vertebrates have
longer legs than relatedanimals of similar mass, that do not jump
(Emerson1985). Figure 6c suggests that for small insects
usingcatapult mechanisms, the advantage of long legs mightbe small.
Locusts have remarkably long hind legs but(as Dr R. F. Ker has
pointed out to me) flea beetles(Phyllotreta) do not.Figure 7a, c
indicates that, to be most effective forjumping, the moment arms of
the knee extensormuscles of humans and insects should decrease as
thejoint extends. The reverse is found both in humans andin
locusts. The kinematics of the human knee iscomplicated by the
effect of the patella (Bishop 1977),but Lindahl & Movin's
(1967) graphs of quadricepselongation against knee angle show that
the muscles'effective moment arm is 80 %? reater when the knee
isnear full extension than when it is bent to 90?. Theexplanation
here may be that the leg is principallyadapted for walking and
running, in which maximumforces act when the knee is much
straighter than whenbent in preparation for a jump.The moment arm
about the knee of the extensortibiae muscle of locusts is very
small when the knee isfully flexed and increases as the knee
extends (Bennet-Clark 1975). This is an essential feature of the
catapultmechanism because it enables the small flexor tibiaemuscle
to hold the knee flexed while tension builds upin the extensor. The
requirements of the catapultrelease mechanism apparently override
the advantage(indicated by figure 7 c) of a moment arm that
decreasesas the joint extends.Lutz & Rome (1994) found that the
semimembra-nosus muscles of frogs shorten at a constant rateduring
take-off for a jump, presumably a consequenceof moment arms that
fall as the leg extends.Figure 9 suggests that humans should not
bend their
legs as much as bushbabies and insects, when preparingto jump.
This is observed; humans bend the knee toabout 75? (Bobbert &
van Ingen Schenau 1988),Galago to 30? (Guinther 1985) and locusts
almost to 0?(Heitler 1977). I am not inclined to attach
muchsignificance to this correspondence between theory
andobservation because human legs are not principallyadapted for
jumping.Jumping is a relatively simple process, performed insimilar
ways by a wide variety of animals. An objective(to jump as high or
as far as possible) is easily defined.These features make jumping a
peculiarly attractivesubject for investigations such as this one,
which hasexplored the effects of muscle properties, leg design
andtechnique on jumping performance.REFERENCESAlexander, R.McN.
1981 Mechanics of skeleton andtendons. In Handbookf physiology
thenervousystem(ed.V. B. Brooks), edn 2, vol. 2, pp. 17-42.
Bethesda, Mary-land: American Physiological Society.Alexander,
R.McN. 1985 The maximum forces exerted byanimals. J. exp.Biol. 115,
231-238.Alexander, R.McN. 1988 Elastic mechanismsn
animalmovement.ambridge University Press.Bennet-Clark,H.C. 1975 The
energetics of the jump of thelocust Schistocercaregaria.J.
exp.Biol. 63, 53-83.Bennet-Clark,H.C. 1976 Energy storageinjumping
insects.In The nsectntegumented. H. R. Hepburn), pp.
421-443.Amsterdam: Elsevier.Bennet-Clark,H.C. & Lucey, E.C.A.
1967 The jump of the
flea: a study of the energetics and a model of themechanism. J.
exp.Biol. 47, 59-76.Bishop, R.E.D. 1977 On the mechanics of the
human knee.Engng.Med. 6 (2), 46-52.Bobbert, M.F. & van Ingen
Schenau, G.J. 1988 Co-ordination in verticaljumping. J.
Biomechan.1, 249-262.Calow, L.J. & Alexander, R.McN. 1973 A
mechanicalanalysis of a hind leg of a frog (Ranatemporaria)..
Zool.171, 293-321.Cutts, A. 1986 Sarcomere length changes in the
wingmuscles during the wing beat cycle of two bird species.J.
Zool.A209, 183-185.Dimery, NJ. 1985 Muscle and sarcomere lengths in
thehind leg of a rabbit (Oryctolagus uniculus)during agalloping
stride. J. Zool.A205, 373-383.Dowling, JJ. & Vamos, L. 1993
Identification of kineticand temporalfactors related to
verticaljump performance.J. appl.Biomechan., 95-110.Emerson, S.B.
1985 Jumping and leaping. In Functionalvertebrateorphologyed. M.
Hildebrand, D. M. Bramble &K. F. Liem), pp. 58-72. Cambridge,
Massachussetts:Belknap Press.Ettema, GJ.C., Huijing, P.A., van
Ingen Schenau, G.J. & deHaan, A. 1990 Effects of prestretch at
the onset ofstimulation on mechanical work output of rate
medialgastrocnemius muscle-tendon complex. J. exp.Biol.
152,333-351.Fedak, M.A., Heglund, N.C. & Taylor, C.R.
1982Energetics and mechanics of terrestrial locomotion. II.Kinetic
energy changes of the limbs and body as a functionof speed and body
size in birds and mammals. J. exp.Biol.97, 23-40.Fitts, R.H.,
Costill, D.L. & Gardetto, P.R. 1989 Effect ofswim exercise
training on human muscle fiber function.J. appl.Physiol.66,
465-475.
Phil. Trans.R. Soc.Lond.B (1995)
-
8/14/2019 Salto Alexander
15/15
248 R. McN. Alexander Leg design andjumping techniqueGrand, T.I.
1977 Body weight: its relation to tissuecomposition, segment
distribution and motor function. I.Interspecific comparisons. Am.
J. phys. Anthrop.47,211-240.Gunther, M.M. 1985 Biomechanische
Voraussetzungenbeim Absprung des Senegalgalagos. Z.
Morph.Anthrop.5,
287-306.Guinther,M.M., Ishida, H., Kumakura, H. & Nakano,
Y.1991 The jump as a fast mode of locomotion in arborealand
terrestrialbiotopes. Z. Morph.Anthrop. 8, 341-372.Heitler, W.J.
1977 The locust jump. III. Structuralspecializations of the
metathoracic tibiae. J. exp.Biol. 67,29-36.Hill, A.V. 1938 The heat
of shortening and the dynamicconstants of muscle. Proc.R. Soc.
LondB 126, 136-195.Hirano, M. & Rome, L.C. 1984 Jumping
performance offrogs (Rana pipiens) s a function of muscle
temperature.J. exp.Biol. 108, 429-439.Huxley, A.F. & Simmons,
R.M. 1971 Mechanical proper-ties of the crossbridges of frog
striated muscle. J. Physiol.,Lond.218, 59P-60P.Josephson, R.K. 1984
Contraction dynamics of flight andstridulatorymuscles of
tettigoniid insects. J. exp.Biol. 108,77-96.Ker, R.F., Alexander,
R.McN. & Bennett, M.B. 1988 Why
are mammalian tendons so thick? J. Zool., Lond.
216,309-324.Komi, P.V. & Bosco, C. 1978 Utilization of stored
elasticenergy in leg extensor muscles by men and women.
Med.Scienta.Sports10, 261-265.Lindahl, O. & Movin, A. 1967 The
mechanics of extensionof the kneejoint. Actaorthop. candinav.8,
226-234.Lutz, G.J. & Rome, L.C. 1994 Builtforjumping: the
designof the frog muscular system. Science,Wash.263, 370-372.Otten,
E. 1987 A myocyberneticmodel of thejaw system ofthe rat. J.
Neurosci.Meth.21, 287-302.Pandy, M.G., Zajac, F.E., Sim, E. &
Levine, W.S. 1990 Anoptimal control model for maximum-height
humanjump-ing. J. Biomechan.3, 1185-1198.Rogers, E. 1986 Looking t
vertebrates. arlow: Longman.Ruegg,J.C. 1968 Contractilemechanismsof
smooth muscle.Symp.Soc.exp.Biol. 22, 45-66.Tihanyi, J., Apor, P.
& Fekete, Gy. 1982 Force-velocity-power characteristicsand
fibercompositionin human kneeextensor muscles. Eur.J.
appl.Physiol.48, 331-343.Winter, D.A. 1990 Biomechanicsnd
motorcontrolof humanmovement,dn. 2, New York: Wiley.Woledge, R.C.,
Curtin, N.A. & Homsher, E. 1985 Energeticaspects f muscle
ontraction. ondon: Academic Press.Received 6 May 1994; accepted8
August1994
Phil. Trans.R. Soc.Lond.B (1995)