Embed Size (px)
Citation preview

Mathieu Grossard - UPMCVendredi 14 octobre 2011 1/64
Séminaire
Synthèse optimale de structures flexibles à transduction piézoélectrique intégrée
–Applications en micromanipulation
Mathieu GROSSARD
CEA List, Fontenay-aux-RosesLaboratoire de Robotique Interactive

Mathieu Grossard - UPMCVendredi 14 octobre 2011 2/64
Intégration en mécatronique
� Mécatronique� domaine scientifique interdisciplinaire� robotique : domaine pionnier
� Evolution vers le concept d’adaptronique� éléments fonctionnels d’une
régulation classique dans un seul système
� intégration fonctionnelle
� Concept de « Smart structure »PVDF
PZT
Fibres optiques
1. Introduction générale
PZT
AMF
Electrostatique
Système de contrôle
Actionneur Structure Capteur
Haut degré d’intégration
Mathieu Grossard - UPMCVendredi 14 octobre 2011 3/64
Intégration en mécatronique
� Mécatronique� domaine scientifique interdisciplinaire� robotique : domaine pionnier
� Evolution vers le concept d’adaptronique� éléments fonctionnels d’une
régulation classique dans un seul système
� intégration fonctionnelle
� Concept de « Smart structure »
1. Introduction générale
Actionneur Capteur
Contrôleur
Structure mécanique
Matériau actif

Mathieu Grossard - UPMCVendredi 14 octobre 2011 4/64
La microrobotique, un champ privilégié
� Microrobot� fonctionnalités du robot…
� action sur l’environnement� fonction de perception � traitement de l’information
� …et spécificités du micromonde� taille� objectifs dimensionnels de la tâche
[Clévy 02]
[EPFL 05]micromanipulation
1µm1nm 10nm 100nm
nanomanipulationmanipulation
atomique robotique conventionnelle
meso
1mm10µm 100µm 1m10mm 100mm
1. Introduction générale

Mathieu Grossard - UPMCVendredi 14 octobre 2011 5/64
Particularités de conception des microrobots
� Conception mécatronique� mécanismes flexibles
� avantages du monolithisme• fabrication,• maintenance simplifiée
� ni jeu, ni frottement� fonctions d’actionnement et de mesure
� faible encombrement mais grande résolution� technologies à base de matériaux actifs
� Commande des microrobots� effets d’échelle
� écriture de modèle dynamique difficile� difficulté d’intégration des capteurs� influence et variabilité de l’environnement
� comportement non-linéaire des matériaux
� Conception pluridisciplinaire� cahier des charges complexe� conception non-intuitive
[Huang 06]
[Nah 07]
1. Introduction générale
bimorphe piézoélectrique
[Agnus 02]
[Shacklock 05]

Mathieu Grossard - UPMCVendredi 14 octobre 2011 6/64
Petit aparté sur les systèmes flexibles
� Terminologie anglo-saxonne de “compliance”
1. Introduction générale
Tendre vers le MONOLITHISME(structure, actionneur, capteur)
Structure compliante :Transmettre une action mécanique (mouvement, force) par déformation
élastique
Mécanisme articulé Mécanisme flexible

Mathieu Grossard - UPMCVendredi 14 octobre 2011 7/64
Rappels1. Introduction générale
� Modélisation de système flexible
� Définition de “mécanisme flexible”� Système LTI à paire de pôles complexes conjugués faiblement amortis� Exercice : mise en équation
• Cas monovariable : système masse-ressort-amortisseur• Cas multivariable : représentation d’état
� Problèmatique liée à la commande amortissante de cels systèmes� Amortissement du comportement vibratoire lors du régime transitoire� Lieux des pôles du système en boucle fermée
ReSens de déplacement des pôles
Zone d’instabilité
Im
0

Mathieu Grossard - UPMCVendredi 14 octobre 2011 8/64
Démarche d’analyse et de synthèse
Modèle dynamique Identification
Analyse et simulation
Synthèse du correcteur
Implémentation
Evaluation du système boucle fermée
Objectifs de performances
Itérations possibles
Equations discrétisées du comportement
entrée/sortie
Géométrie du système
Loi constitutive du matériau
Conditions aux limites
Réduction de modèle
Commandabilité Observabilité
Actionneur
Capteur
1. Introduction générale

Mathieu Grossard - UPMCVendredi 14 octobre 2011 9/64
Outils d’aide à la conception optimale de structure s actives
� Optimisation basée sur l’expérience du concepteur� structure mécanique et actionnement simultanément� intégration plus ou moins intuitive
� Méthodes systématiques de synthèse optimale� structure mécanique seule� intégration fonctionnelle de matériau actif
� Nécessité d’une aide à la conception� intégration physique des actionneurs et capteurs
couplage multiphysique
� placements des actionneurs et capteursperformances sur le comportement mécanique et le correcteur
Dim. 13 ×××× 13 ×××× 0.4
1. Introduction générale
[Bellouard 02]
[Lemaire 08]
[Breguet 97]
[Allaire 02]
[Rubio 06]
Mathieu Grossard - UPMCVendredi 14 octobre 2011 10/64
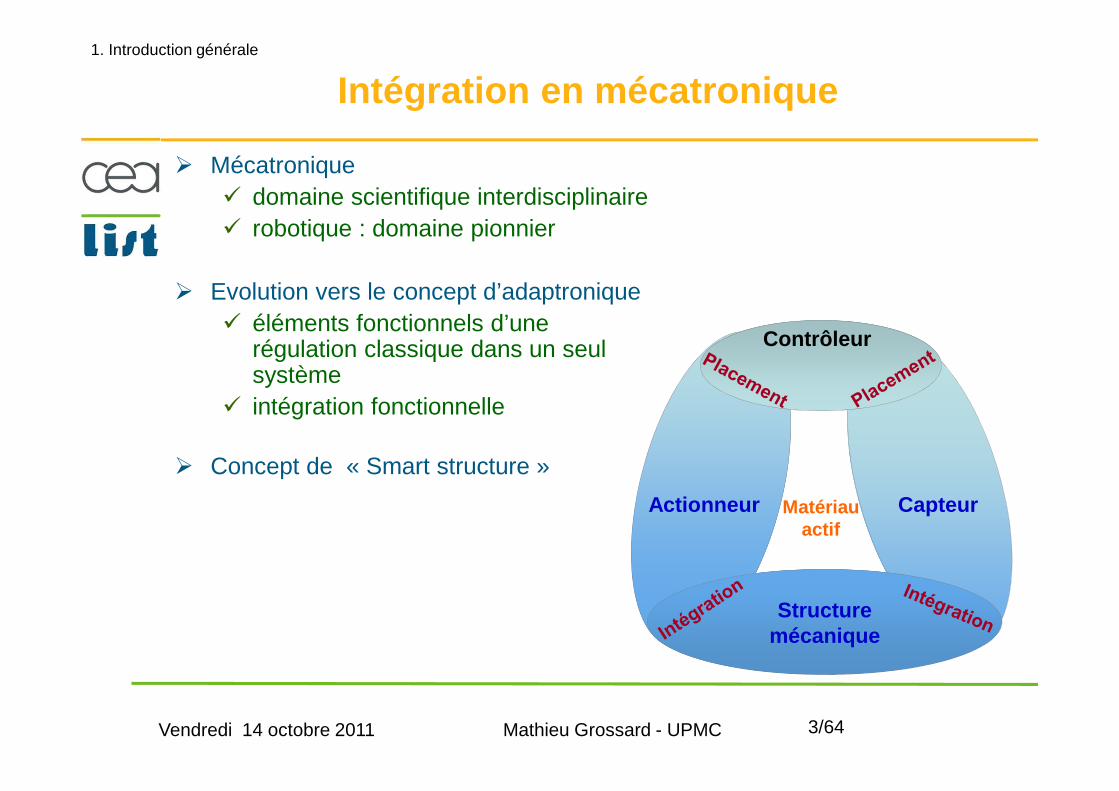
Objectifs de recherche (1/2)
� Développements d’une méthode de synthèse optimale
� conception de systèmes monolithiques flexibles 2D à actionnement et mesure intégrés� intégration structure-actionneur-capteur
� choix du matériau piézoélectrique� bonnes performances au sens
micromécatroniquerésolution, force, bande passante, …
� comportement électromécanique connu• quasi-linéarité• formulation EF mixte
� grandeur de commande électrique� réalisation technologique
Optimisation multi-critères
Fo1
Fo2
1. Introduction générale

Mathieu Grossard - UPMCVendredi 14 octobre 2011 11/64
Objectifs de la recherche (2/2)
� Intégration de la dynamique dans la méthode� description par un modèle dynamique
� prédiction de la réponse fréquentielle
� ajouts de nouveaux critères� orientation de la réponse fréquentielle
� Mise en œuvre de la méthode � conception de micromanipulateurs optimaux
• structure / actionnement• comportement fréquentiel• structure / actionnement / mesure
� caractérisation et commande
1. Introduction générale
Microsystème
Déplacement δPerturbations
Entrée de commande
Correcteur

Mathieu Grossard - UPMCVendredi 14 octobre 2011 12/64
Plan
1. Présentation de la méthode des blocs
2. Synthèse optimale de structures à actionnement inté gré
3. Synthèse optimale de structures à actionnement et m esure intégrés
4. Autre exemple d’utilisation de la méthode
5. Conclusion et perspectives

Mathieu Grossard - UPMCVendredi 14 octobre 2011 13/64
Approche générale
� Conception de structures flexibles
Représentation curviligne de structures
Découpage en briques élémentaires de construction :
� blocs flexibles élémentaires� conditions aux limites d’actionnement� contacts� conditions aux limites d’encastrement� sortie mécanique
[Bernardoni 04]
mouvement de l’actionneur
contacts internes
base fixe
sorties mécaniques (mouvement de
fermeture)
Représentation CAO
1. Présentation de la méthode des blocs
2mm

Mathieu Grossard - UPMCVendredi 14 octobre 2011 14/64
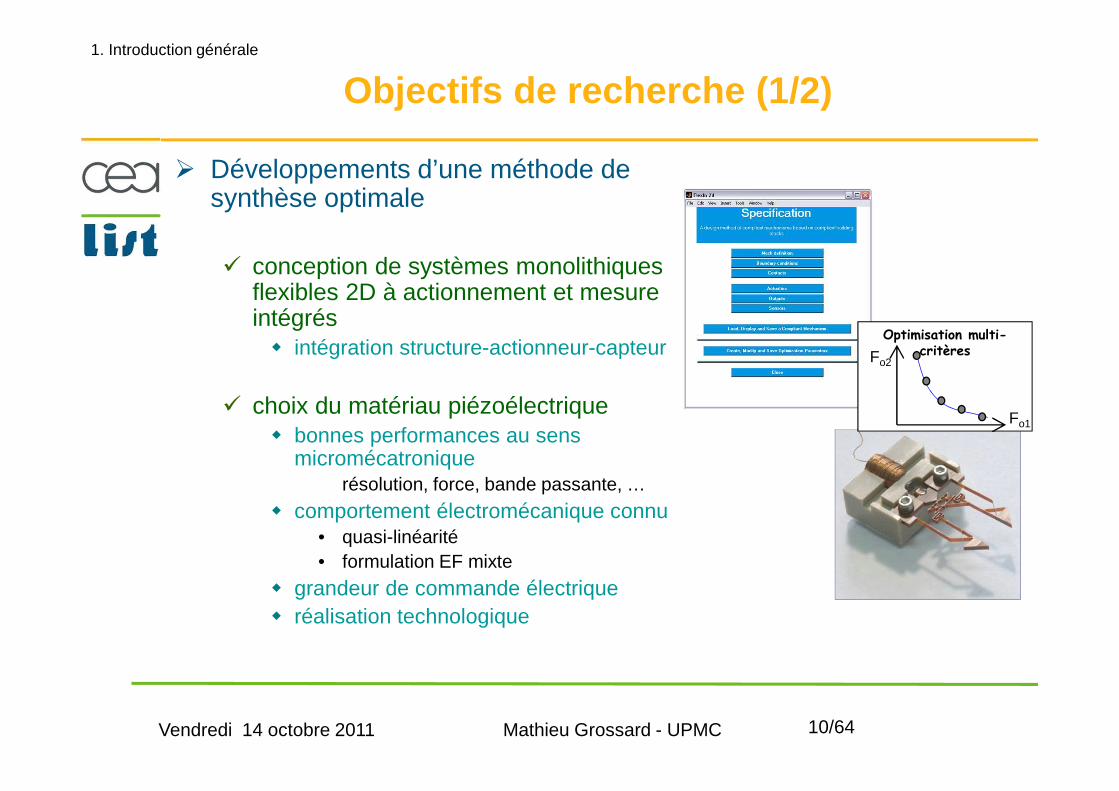
� Décomposition du domaine de conception
Méthode des blocs
Spécification du problème d’optimisation(blocs, domaine, critères, contraintes)
Algorithme d’optimisation multi-objectifs
Interprétation de l’assemblage de blocs flexibles
Choix d’un compromis
Fo1
Fo2
ValidationsSimulations/Prototypage
1. Présentation de la méthode des blocs
b1 b2 b3 b4
a 1a 2
nœud du maillage
exemple d’un emplacement rectangulaire
pour bloc élémentaire
domaine de conception
(structure à optimiser)
Mathieu Grossard - UPMCVendredi 14 octobre 2011 15/64
� Décomposition du domaine de conception
� Bibliothèque de blocs flexiblesélémentaires� topologies de 36 blocs� ddl multiples et couplés
Méthode des blocs
Spécification du problème d’optimisation(blocs, domaine, critères, contraintes)
Algorithme d’optimisation multi-objectifs
Interprétation de l’assemblage de blocs flexibles
Choix d’un compromis
Fo1
Fo2
ValidationsSimulations/Prototypage
1. Présentation de la méthode des blocs

Mathieu Grossard - UPMCVendredi 14 octobre 2011 16/64
� Décomposition du domaine de conception
� Bibliothèque de blocs flexiblesélémentaires� topologies de 36 blocs� ddl multiples et couplés
� Conception optimale� fronts de Pareto� validation� réalisation
Méthode des blocs
Spécification du problème d’optimisation(blocs, domaine, critères, contraintes)
Algorithme d’optimisation multi-objectifs
Interprétation de l’assemblage de blocs flexibles
Choix d’un compromis
Fo1
Fo2
ValidationsSimulations/Prototypage
1. Présentation de la méthode des blocs

Mathieu Grossard - UPMCVendredi 14 octobre 2011 17/64
� Décomposition d’un bloc élementaire
Méthode des blocs1. Présentation de la méthode des blocs

Mathieu Grossard - UPMCVendredi 14 octobre 2011 18/64
� Modélisation élements finis 2D des poutres� Hypothèses d’Euler-Bernoulli� Matrices EF
� Transformation de repère� Assemblage des poutres : modèle bloc� Assemblage des blocs : modèle structure
Méthode des blocs1. Présentation de la méthode des blocs
Mathieu Grossard - UPMCVendredi 14 octobre 2011 19/64Mathieu Grossard - UPMCVendredi 14 octobre 2011
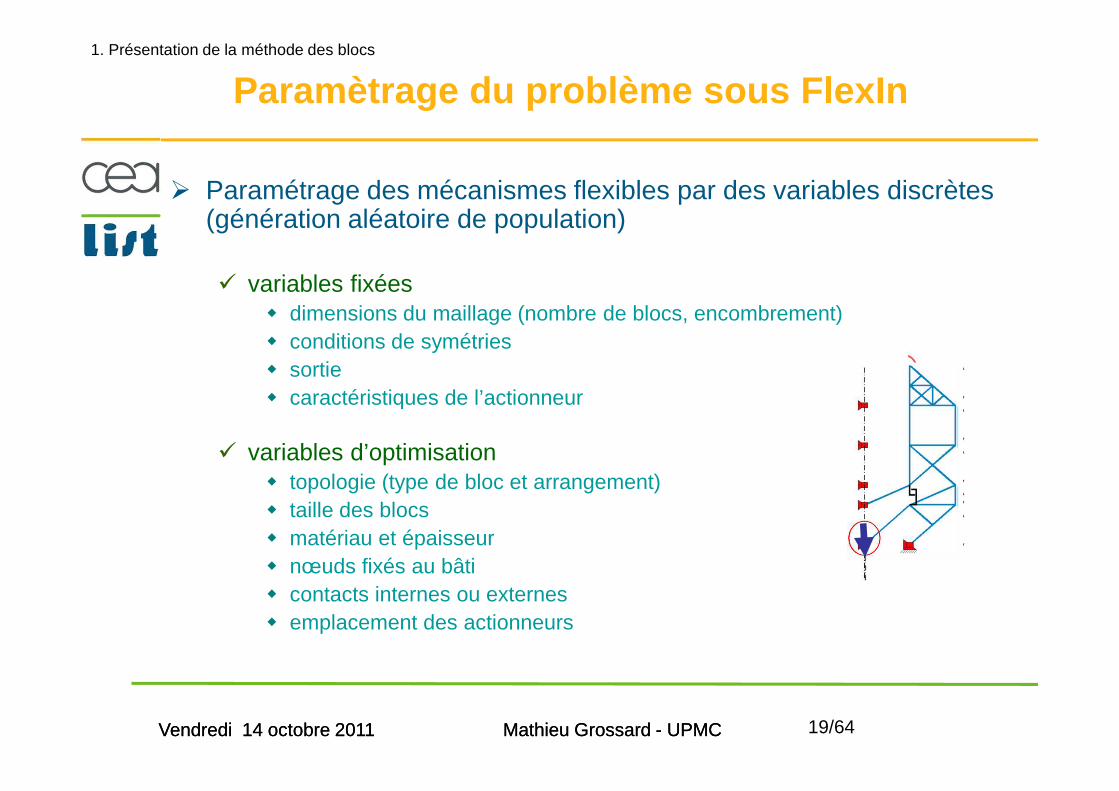
Paramètrage du problème sous FlexIn
� Paramétrage des mécanismes flexibles par des variables discrètes (génération aléatoire de population)
� variables fixées� dimensions du maillage (nombre de blocs, encombrement)� conditions de symétries� sortie� caractéristiques de l’actionneur
� variables d’optimisation� topologie (type de bloc et arrangement)� taille des blocs� matériau et épaisseur� nœuds fixés au bâti� contacts internes ou externes� emplacement des actionneurs
1. Présentation de la méthode des blocs
Mathieu Grossard - UPMCVendredi 14 octobre 2011 20/64Mathieu Grossard - UPMCVendredi 14 octobre 2011
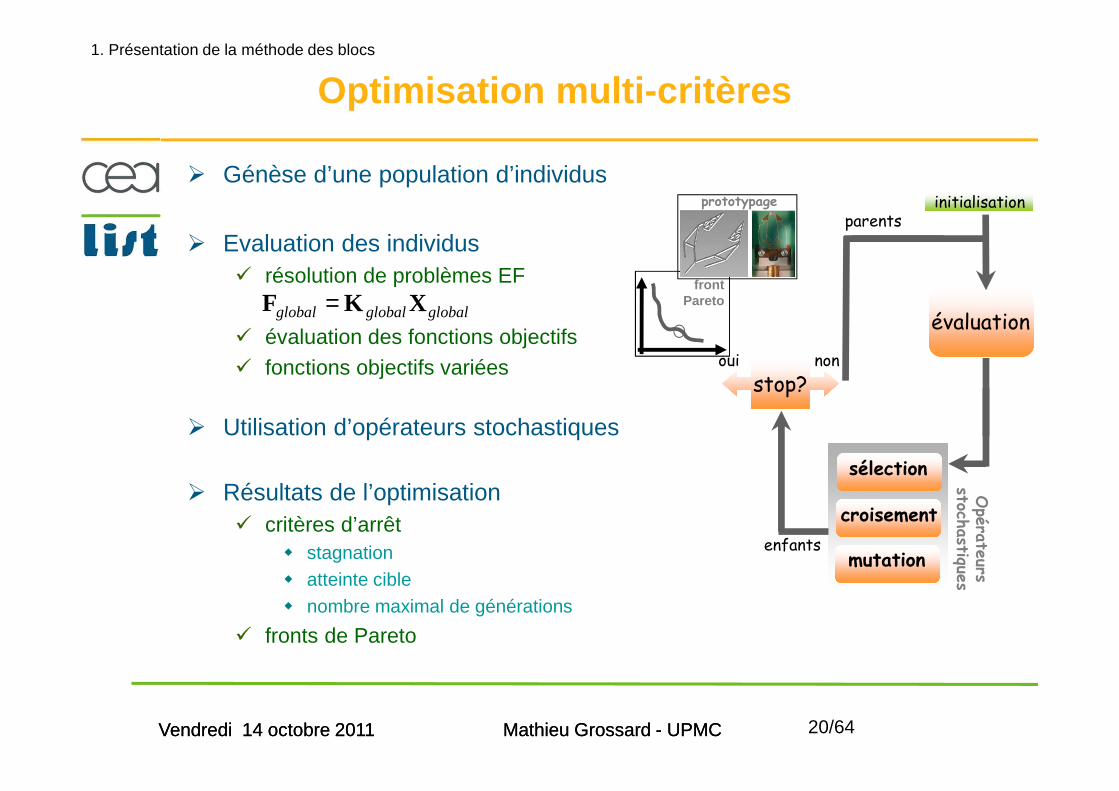
Optimisation multi-critères
� Génèse d’une population d’individus
� Evaluation des individus� résolution de problèmes EF
� évaluation des fonctions objectifs� fonctions objectifs variées
� Utilisation d’opérateurs stochastiques
� Résultats de l’optimisation� critères d’arrêt
� stagnation� atteinte cible� nombre maximal de générations
� fronts de Pareto
1. Présentation de la méthode des blocs
global global global=F K X
parents
oui
enfants
Opé
rate
urs stoch
astique
s
sélection
mutation
croisement
stop?non
initialisation
frontPareto
prototypage
évaluation

Mathieu Grossard - UPMCVendredi 14 octobre 2011 21/64
Plan
1. Présentation de la méthode des blocs
2. Synthèse optimale de structures à actionnement inté gré
3. Synthèse optimale de structures à actionnement et m esure intégrés
4. Autre exemple d’utilisation de la méthode
5. Conclusion et perspectives

Mathieu Grossard - UPMCVendredi 14 octobre 2011 22/64Mathieu Grossard - UPMCVendredi 14 octobre 2011
Intégration d’une bibliothèque active
� Blocs actifs de topologie variée� assemblage de poutres élémentaires� mode actionneur� actionnement plan distribué� commandés en tension électrique Up
UpUp
2. Synthèse optimale de structures à actionnement intégré
Bloc 14
Bloc 3 Bloc 4 Bloc 5 Bloc 9 Bloc 11Bloc 10
Bloc 12 Bloc 13Bloc 15 Bloc 16 Bloc 29
Bloc 31
Bloc 30
Bloc 32 Bloc 33 Bloc 34 Bloc 35
Bloc 2 Bloc 3Bloc 1 Bloc 4 Bloc 5 Bloc 6
Bloc 7 Bloc 8 Bloc 9
Bloc 10
Bloc 11 Bloc 12 Bloc 13
Bloc 15
Bloc 14
Bloc 16 Bloc 17 Bloc 19 Bloc 20Bloc 18 Bloc 21
Bloc 22 Bloc 23 Bloc 24 Bloc 26 Bloc 27Bloc 25 Bloc 28
Bloc 29 Bloc 30 Bloc 31 Bloc 32Bloc 33 Bloc 35Bloc 34
Bloc 36
Bloc 36
Blo
cs p
assi
fsB
locs
act
ifs

Mathieu Grossard - UPMCVendredi 14 octobre 2011 23/64Mathieu Grossard - UPMCVendredi 14 octobre 2011
Modélisation d’une poutre piézoélectrique élémentair e2. Synthèse optimale de structures à actionnement intégré
� A propos de la piézoélectricité� Apparition de charges électriques sous l’effet d’une
contrainte mécanique : effet direct� Déformation de la maille cristalline sous l’effet de
l’apparition de charges électriques : effet inverse
� Relations de la piézoélectricité� Cas de la céramique PZT de la classe hexagonale

Mathieu Grossard - UPMCVendredi 14 octobre 2011 24/64Mathieu Grossard - UPMCVendredi 14 octobre 2011
Modélisation d’une poutre piézoélectrique élémentair e
� Choix du mode de déformation� travail en traction/compression� effet piézoélectrique inverse
� Approche variationnelle� principe de Hamilton généralisé� contributions électromécaniques� hypothèses cinématiques
� Formulation EF dynamique� relations matricielles du comportement poutre� force d’origine électromécanique Fp
e
mp p p p p p pM X K X G V F+ = +&&
hpolarisation
PZT
électrode supérieure
φ1
φ2
ep
L
électrode inférieure
( )ep 1 2F φ φ∝ −
2. Synthèse optimale de structures à actionnement intégré

Mathieu Grossard - UPMCVendredi 14 octobre 2011 25/64
Implémentation sous FlexIn
� Blocs actifs élémentaires� validation comportementale en
statique � chargement électromécanique aux
noeuds externes
� Codage d’une structure complète� structure monolithique par assemblage
des blocs actifs et passifs� topologie active/passive
coude
triangle
carré
Nœuds externes
Nœuds internesmatrice d’entiers
topologie active / passive
1 3 3
5 6 12
0
33
2. Synthèse optimale de structures à actionnement intégré
blocs PZTpoutre

Mathieu Grossard - UPMCVendredi 14 octobre 2011 26/64
électrodes
électrodes
Exemple applicatif : le cas du MMOC
� Microprehensile Microrobot On Chip [Agnus 02]
PZT PIC151
L=13mm
zxy
y
z
x
PZT
+Vy -Vy
-Vy +Vy
E1 E2
2. Synthèse optimale de structures à actionnement intégré
bimorphe piézoélectrique
Section d’un doigt actionneur

Mathieu Grossard - UPMCVendredi 14 octobre 2011 27/64
� Mécanisme monolithique symétrique� PIC 151� maillage (3 3)
� Paramètres d’optimisation� V= 100V� topologie active/passive
� Optimisation multi-critères� déflexion δ� force F
� Légendebloc à déterminerddl souhaité pour le noeud de sortienœuds bloqués en rotation Rz et translation Xy
nœuds autorisés pour être complètement bloqués (optimisation A)nœuds autorisés pour être complètement bloqués (optimisation B)
Spécifications du problème
7,5mm
13mm
Sortie
???
???
???
b
a
7,5mm
Axe
de
sym
étrie
?
2. Synthèse optimale de structures à actionnement intégré
Mathieu Grossard - UPMCVendredi 14 octobre 2011 28/64
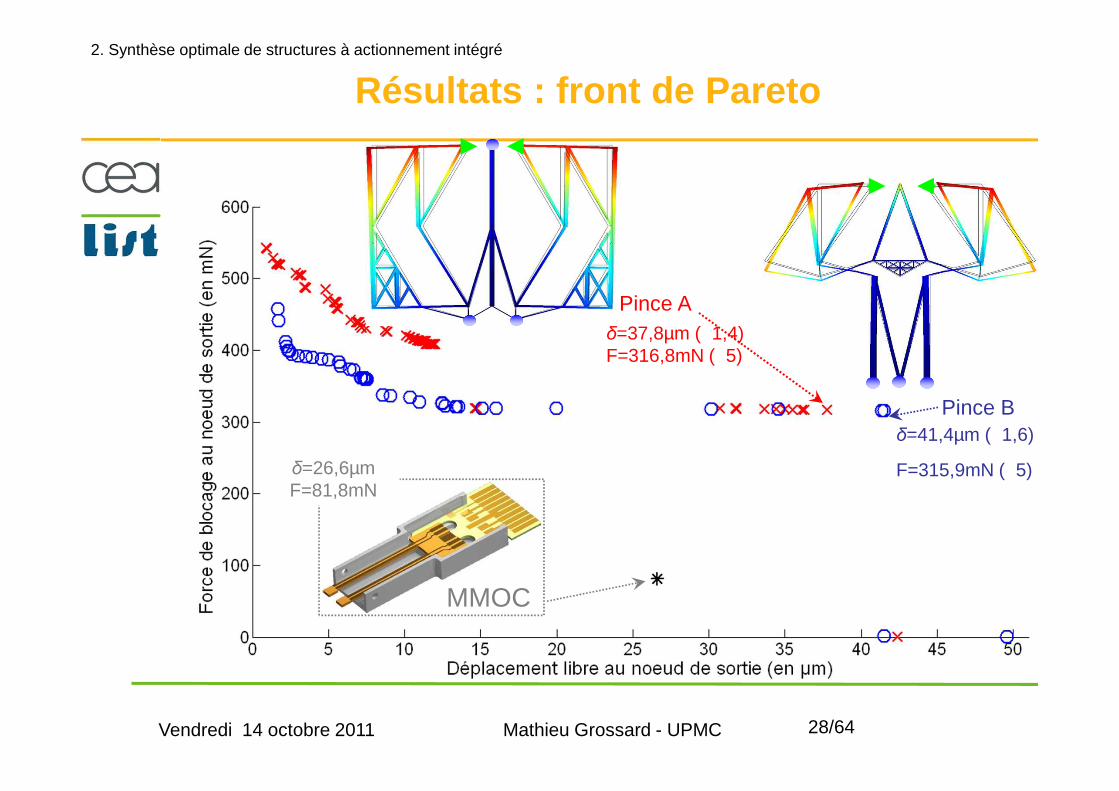
Résultats : front de Pareto
MMOC
δ=26,6µm F=81,8mN
Pince Bδ=41,4µm ( 1,6)
F=315,9mN ( 5)
Pince Aδ=37,8µm ( 1,4)F=316,8mN ( 5)
2. Synthèse optimale de structures à actionnement intégré

Mathieu Grossard - UPMCVendredi 14 octobre 2011 29/64Mathieu Grossard - UPMCVendredi 14 octobre 2011
Implémentation de la dynamique
� Modèle dynamique matriciel du 2nd ordre
� comportement non-dissipatif� calcul des matrices masse des blocs� validation fréquentielle en simulation� assemblage matriciel des blocs
� introduction de l’amortissement� écriture dans la base modale� hypothèse d’amortissement diagonal
� matrice de transfert
� simulation de la réponse fréquentielle entrée(s)/sortie(s)
( ) ( )2 tg i i g i g g2ξ ω ω+ + =q diag q diag q Q E u&& &
g g=y F Qq
tpg i i g
2 2i 1 i i is 2ξ ω s ω=
=+ +∑F Q Q E
y u
2. Synthèse optimale de structures à actionnement intégré
g g g g g
g g
+ ==
M X K X E u
y F X
&&
N mode
Fréquence (kHz)
1 2 3
2
4
6
8
10
FlexIn
Comsol

Mathieu Grossard - UPMCVendredi 14 octobre 2011 30/64
Problématique de l’identification des structures fl exibles
� Réduction du nombre de modes dominants
Nbre de ddl d’un modèle discrétisé trop important
Modèle EF Structure complexe
Réduction de modèle(Troncature dans la base de représentation modale)
Proposition d’un nouveau critère JJJJ1111dans la méthode d’optimisation
(répartition des autorités de contrôle modales)
2. Synthèse optimale de structures à actionnement intégré
Compromis entre ordre et précision de représentation,
spillover

Mathieu Grossard - UPMCVendredi 14 octobre 2011 31/64
� Réduction dans la base modale� méthode de Moore dans la base
modale diagonale� reflet du degré de
commandabilité/observabilité joint� troncature directe dans la base
modale
� Ecriture du critère numérique J1k
� choix du nombre k de modes dominants� maximisation des autorités de
contrôle des k premiers modes� minimisation des modes hors
bande-passante
� interprétation graphique par la norme ║. ║∞ (SISO)
ω (rad/s)
Amplitude (dB)Pics importants
Pics diminués
ωk
Bande passante
u ySous-système dominant
Sous-système faible
Modèle réduit obtenu par troncature
2. Synthèse optimale de structures à actionnement intégré
Problématique de l’identification des structures fl exibles

Mathieu Grossard - UPMCVendredi 14 octobre 2011 32/64
Problématique de la commande des structures flexibl es
� Analyse des propriétés fréquentielles des structures flexibles
Synthèse de la commande sur le modèle de connaissance
2. Synthèse optimale de structures à actionnement intégré
Proposition d’un second critère J2(insensibilité aux variations locales des pôles
et zéros)
Ecart entre les modèles de simulation et d’expérimentation
Variabilité des paramètres du système(pôles, zéros,…)
Imperfections des techniques de représentation (modèle simplifié, schématisation du comportement…)
Obtention d’un correcteur :
robustesse en stabilité
facile à synthétiser

Mathieu Grossard - UPMCVendredi 14 octobre 2011 33/64
� Influence du gain de retour g� schéma de commande par rétroaction� trajectoire des pôles en boucle fermée� propriété d’alternance pôle/zéro
boucles de stabilité en boucle fermée
� Ecriture du critère numérique J2k’
� critère exprimé à partir de l’expansion modal du transfert entrée/sortie
� choix du nombre k’ de modes considérés pour l’alternance
yc u+
-
gK(s)
ySystème
Correcteur
Re
Sens de déplacement des pôles
Zone d’instabilité
Im
0
g: 0 →+∞
ω (rad/s)
Amplitude (dB)
alternance pôle/zéro
2. Synthèse optimale de structures à actionnement intégré
Problématique de la commande des structures flexibl es

Mathieu Grossard - UPMCVendredi 14 octobre 2011 34/64Mathieu Grossard - UPMCVendredi 14 octobre 2011
Conception d’une micropince monolithique
� Optimisation multi-critères� mécanique en régime statique
� force de blocage F� déflexion libre δ
� orientée commande J12 et J22
� paramètres d’optimisation� 1 ≤ N blocs actifs ≤ 4� Up = 200V� 1 ≤ N nœuds bloqués ≤ 3
Bloc brut
PZT PIC151
20mm
20mm
2. Synthèse optimale de structures à actionnement intégré
électrode
Fin
Mathieu Grossard - UPMCVendredi 14 octobre 2011 35/64Mathieu Grossard - UPMCVendredi 14 octobre 2011
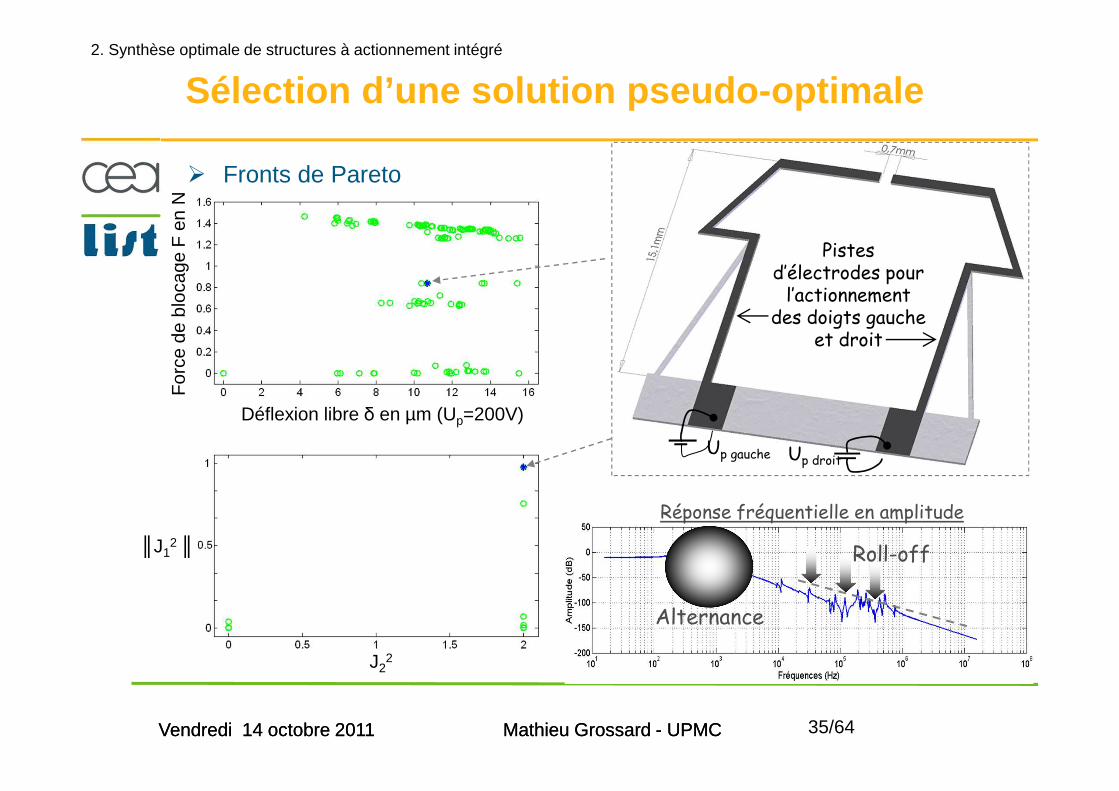
Sélection d’une solution pseudo -optimale
� Fronts de Pareto
Roll-off
Alternance
Réponse fréquentielle en amplitude
Pistes d’électrodes pour
l’actionnement des doigts gauche
et droit
Up droitUp gauche
Déflexion libre δ en µm (Up=200V)
For
ce d
e bl
ocag
e F
en
N
║J12 ║
J22
2. Synthèse optimale de structures à actionnement intégré

Mathieu Grossard - UPMCVendredi 14 octobre 2011 36/64
Protocole expérimentale
� Prototype piézoélectrique� consigne en boucle ouverte� couplage du mouvement X/Y
� Chaîne d’acquisition pour la commande en déflexion
[CEA List/Femto-st, 07]PC + Labview
Microactionneur commandé
Filtre anti-repliementAmplificateur de tension
fe=20kHz
2. Synthèse optimale de structures à actionnement intégré
X
Y
δlibre= 10,69µm
Fblocage=840mN
Tension Vp= 100V
X
Y
Mathieu Grossard - UPMCVendredi 14 octobre 2011 37/64Mathieu Grossard - UPMCVendredi 14 octobre 2011
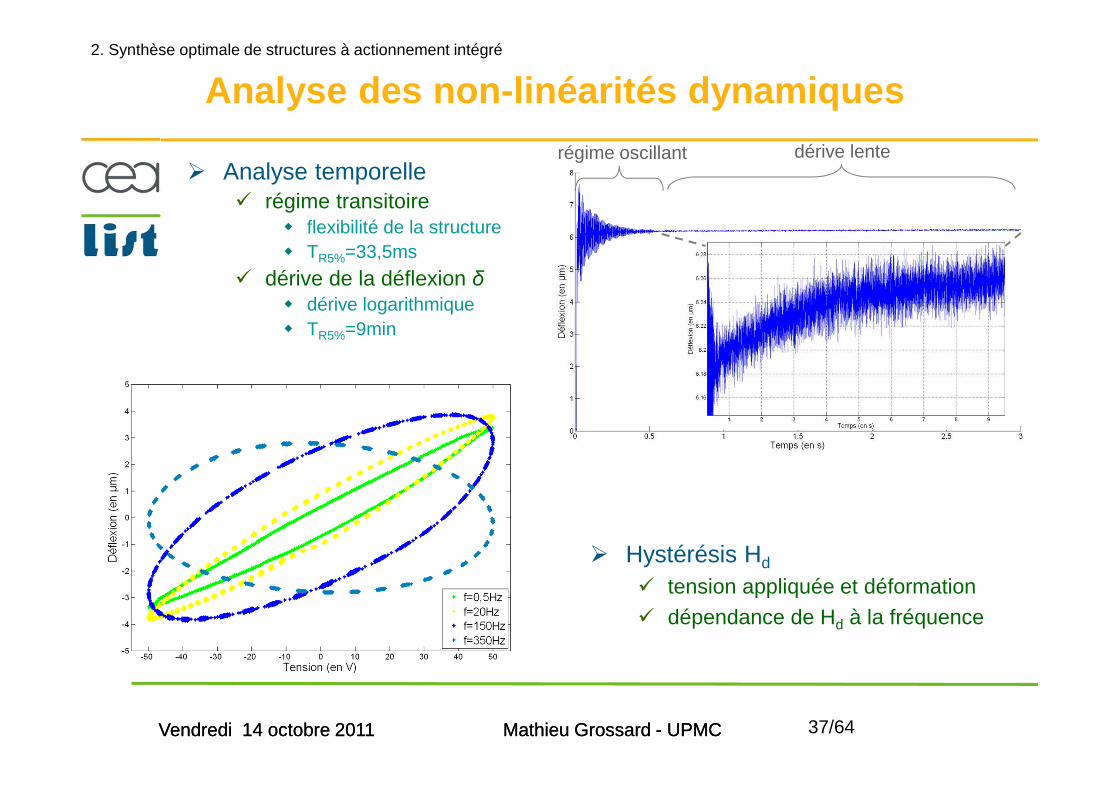
Analyse des non -linéarités dynamiques
� Analyse temporelle� régime transitoire
� flexibilité de la structure� TR5%=33,5ms
� dérive de la déflexion δ� dérive logarithmique� TR5%=9min
� Hystérésis Hd
� tension appliquée et déformation� dépendance de Hd à la fréquence
régime oscillant dérive lente
2. Synthèse optimale de structures à actionnement intégré

Mathieu Grossard - UPMCVendredi 14 octobre 2011 38/64
Hystérésis quasi-statique
Modélisation de l’hystérésis H d
� Validation du principe de séparation
Dynamique vibratoire (4ème ordre)
Hystérésis Hd
U δ
δHystérésis statique H s
Partie transitoire
DU
2. Synthèse optimale de structures à actionnement intégré
Intérêt de J1

Mathieu Grossard - UPMCVendredi 14 octobre 2011 39/64Mathieu Grossard - UPMCVendredi 14 octobre 2011
� Approximation multilinéaire de l’hystérésis statique Hs� modélisation simple� consommation faible en coûts de calculs� incertitudes bornées
αm≤ αSystème≤ αM
� Perturbations additives Q(s)� dérive� décalage de l’hystérésis Hs
� force extérieure de préhension
Modélisation du transfert : tension U / déflexion δ
D(s) F(s)α0Up(s)
Q(s)
δ(s)
δ(t)
Up(t)
2. Synthèse optimale de structures à actionnement intégré
Déf
lexi
on (
en µ
m)
Tension (en V)
Courbe expérimentale d’hystérésis à 0.5Hz
Approximation quadrilatérale
αm=0.052µm/V
αM=0.076µm/V
[Rakotondrabe 06]
Mathieu Grossard - UPMCVendredi 14 octobre 2011 40/64
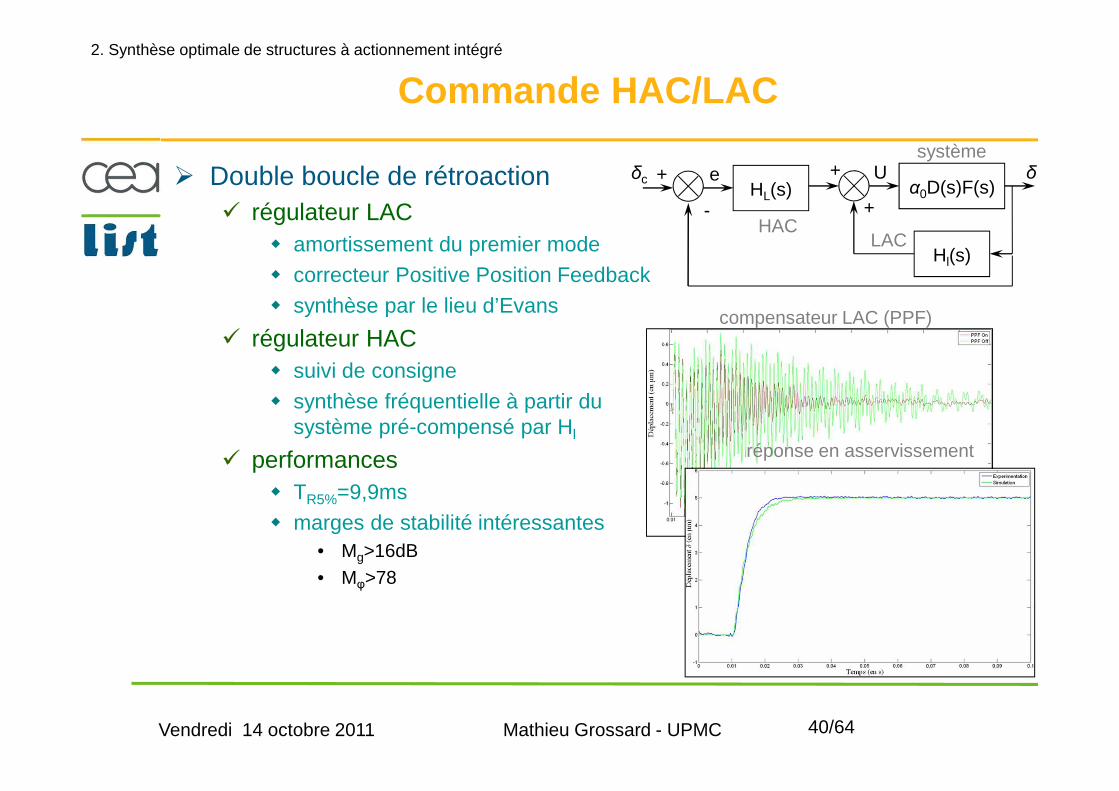
Commande HAC/LAC
� Double boucle de rétroaction� régulateur LAC
� amortissement du premier mode� correcteur Positive Position Feedback� synthèse par le lieu d’Evans
� régulateur HAC� suivi de consigne� synthèse fréquentielle à partir du
système pré-compensé par Hl
� performances� TR5%=9,9ms� marges de stabilité intéressantes
• Mg>16dB• Mφ>78
compensateur LAC (PPF)
réponse en asservissement
HL(s)+
-
δc e
HAC
δUα0D(s)F(s)
système
2. Synthèse optimale de structures à actionnement intégré
Hl(s)LAC
+
+

Mathieu Grossard - UPMCVendredi 14 octobre 2011 41/64
Commande par placement de pôles robustes
� Structure RST� spécifications des pôles en
boucle fermée
� synthèse du correcteur� paramètres haut-niveau
• choix d’un horizon de commande et de filtrage
• choix d’amortissements
� validation en simulation
� performances� TR5%=10,5ms� marges de stabilité
intéressantes• Mg>23dB• Mφ>82
réponse en asservissement
2. Synthèse optimale de structures à actionnement intégré
1/S+
-
δc eB/A
+
+U
δ
q
R
T

Mathieu Grossard - UPMCVendredi 14 octobre 2011 42/64
� Choix du correcteur K(s)
� résolution du problème H∞ standard� pondérations des signaux� système augmenté� mise sous forme standard
� choix des gabarits fréquentiels
� performances� TR5%=9,0ms� stabilité intéressante
• Mg>18dB• Mφ>86
Commande robuste H∞
standard
réponse en asservissement
K(s)+
-
δc eα0D(s)F(s)
+
+U
δ
W1(s) W2(s) W3(s)
e1 e2 d
2. Synthèse optimale de structures à actionnement intégré

Mathieu Grossard - UPMCVendredi 14 octobre 2011 43/64
Comparaisons de performances
� Performances comparables en asservissement� temps de réponse � marges de stabilité
� Intérêts de l’approche HAC/LAC� ordre réduit du correcteur (ordre 4)
� correcteur H∞
ordre 13
� correcteur RSTordre 9
� synthèse plus directe
� Intérêts des critères proposés
Temps (s)
Déf
lexi
on (
µm
)
RST
HAC/LAC
H∞
2. Synthèse optimale de structures à actionnement intégré
[Femto-st/CEA LIST 07]

Mathieu Grossard - UPMCVendredi 14 octobre 2011 44/64
Plan
1. Présentation de la méthode des blocs
2. Synthèse optimale de structures à actionnement inté gré
3. Synthèse optimale de structures à actionnement et m esure intégrés
4. Autre exemple d’utilisation de la méthode
5. Conclusion et perspectives
Mathieu Grossard - UPMCVendredi 14 octobre 2011 45/64Mathieu Grossard - UPMCVendredi 14 octobre 2011
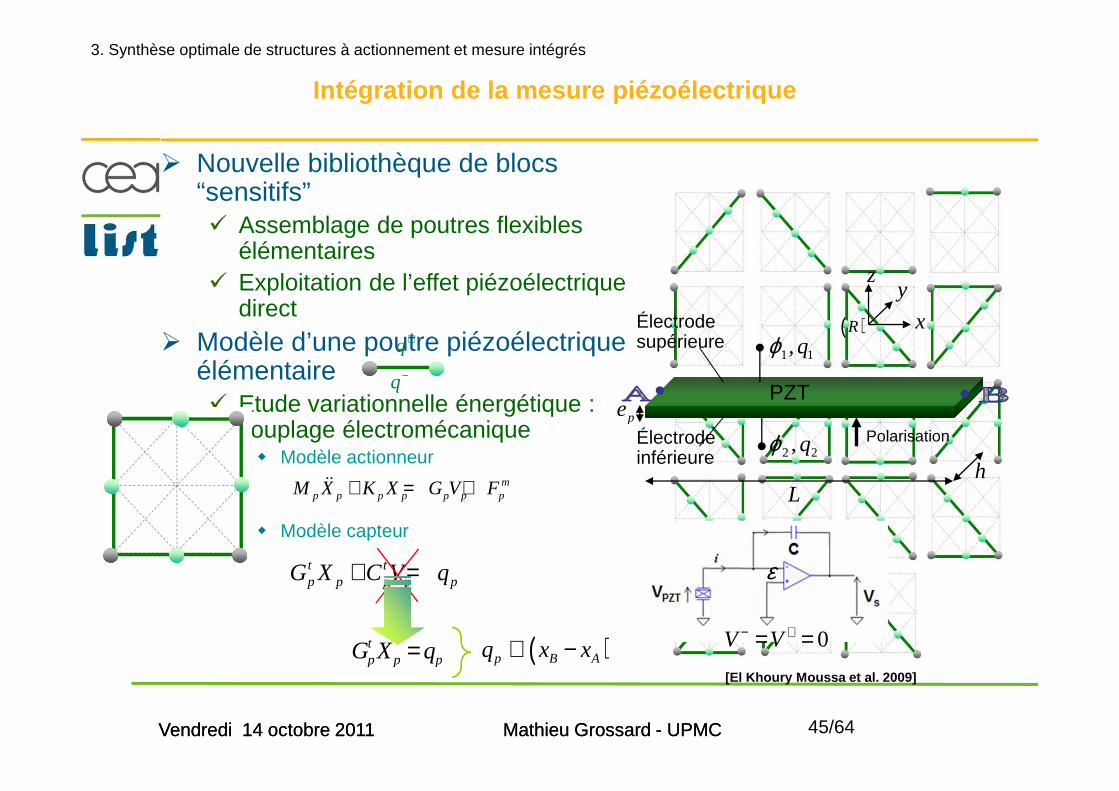
� Nouvelle bibliothèque de blocs “sensitifs”� Assemblage de poutres flexibles
élémentaires� Exploitation de l’effet piézoélectrique
direct� Modèle d’une poutre piézoélectrique
élémentaire� Etude variationnelle énergétique :
couplage électromécanique� Modèle actionneur
� Modèle capteur
Intégration de la mesure piézoélectrique
q+
q−
mp p p p p p pM X K X G V F+ = +&&
t tp p p p pG X C V q+ =
0V V− += =
ε
tp p pG X q= ( )p B Aq x x∝ −
PZT
1 1,qϕ
2 2,qϕ Polarisation
Électrode supérieure
Électrode inférieure
Lh
pe
( )R x
yz
[El Khoury Moussa et al. 2009]
3. Synthèse optimale de structures à actionnement et mesure intégrés

Mathieu Grossard - UPMCVendredi 14 octobre 2011 46/64
� ObjectifEstimation de la sortie mécanique à partir de la mesure de la sortie électrique
Codage topologies
Matrice d’entiers
10 30 31
30 32 4
g
g
g
E
F
L
g g g g
co g
ob g g
M X K X u
y X
y q X
δ + =
= = = =
&&
δ
/ active / sensitivepassive
actV gq
� Modèle de la structure complète� Structure monolithique
par assemblage de blocs� passif� actif� Sensitif
� Concaténation de matrices
Intégration de la mesure piézoélectrique
3. Synthèse optimale de structures à actionnement et mesure intégrés
Mathieu Grossard - UPMCVendredi 14 octobre 2011 47/64
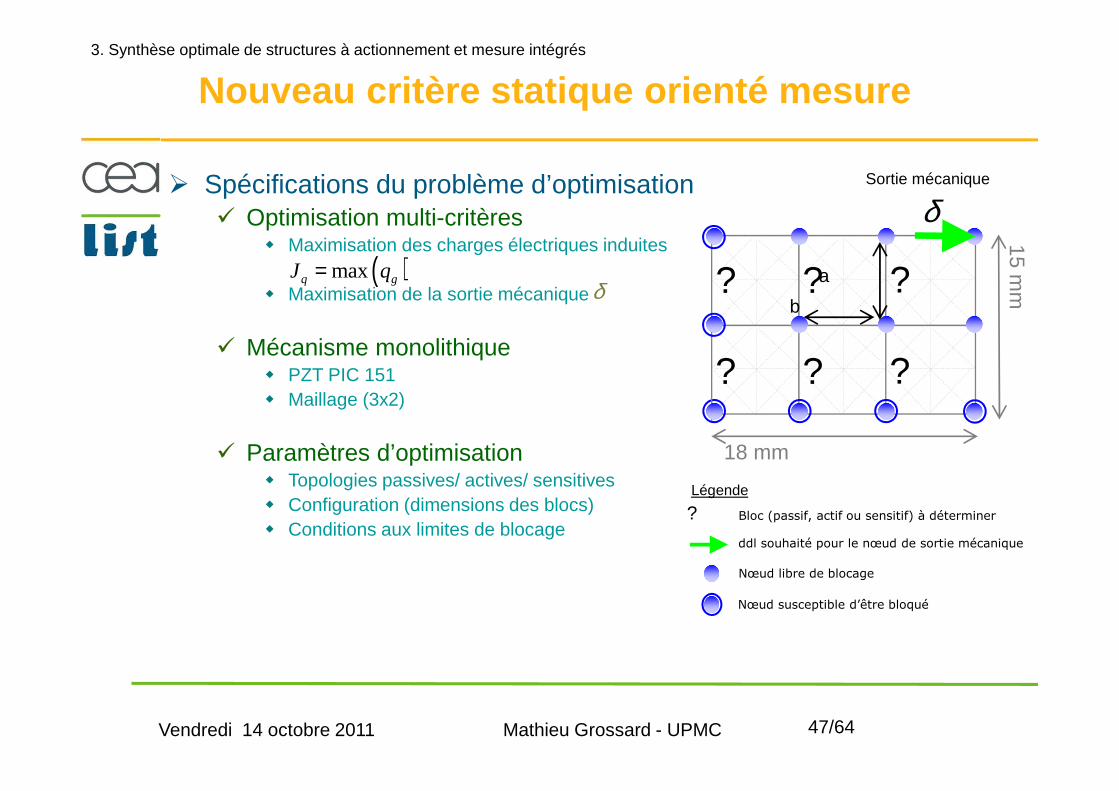
Nouveau critère statique orienté mesure
� Spécifications du problème d’optimisation� Optimisation multi-critères
� Maximisation des charges électriques induites
� Maximisation de la sortie mécanique
� Mécanisme monolithique� PZT PIC 151� Maillage (3x2)
� Paramètres d’optimisation� Topologies passives/ actives/ sensitives� Configuration (dimensions des blocs)� Conditions aux limites de blocage
( )maxq gJ q=δ
7,5mm
15 mm
Sortie mécanique
???
???
b
a
18 mm
ddl souhaité pour le nœud de sortie mécanique
? Bloc (passif, actif ou sensitif) à déterminer
Nœud susceptible d’être bloqué
Nœud libre de blocage
Légende
δ
3. Synthèse optimale de structures à actionnement et mesure intégrés

Mathieu Grossard - UPMCVendredi 14 octobre 2011 48/64
� Résultats du problème d’optimisation
δ δδ
9
9,3
2,65 10g
m
q C
δ µ−
== × 10
9,4
8,80 10g
m
q C
δ µ−
== × 9
23,9
8,00 10g
m
q C
δ µ−
== ×
� Intérêt du critère statique : ordre de grandeur des charges électriques acceptable pour la mesure
Blocs passifsBlocs actifsBlocs sensitifs
Nouveau critère statique orienté mesure3. Synthèse optimale de structures à actionnement et mesure intégrés

Mathieu Grossard - UPMCVendredi 14 octobre 2011 49/64
� Absence de capteur extéroceptif� Estimation de la sortie mécanique
à partir de la mesure de la sortie électrique
� Observabilité du comportement vibratoire
� Procédure itérative� Réduction du modèle du transfert
de la sortie à commander à «k» modes dominants
� Bonne observabilité par des «k» modes dominants
δ
gq
C1
C2 pulsations (rad/s)
x
u
δ
Bonne autorité de contrôle pour les k=2 premiers modes
0
pulsations (rad/s)
gq
u
Bonne observabilité des k=2 premiers modes
0
1ω 2ω
Nouveau critère dynamique orienté mesure3. Synthèse optimale de structures à actionnement et mesure intégrés

Mathieu Grossard - UPMCVendredi 14 octobre 2011 50/64
� Troncature dans la base modale [Moore 1981]
� Transfert de la sortie mécanique à commander
� Degré de l’autorité de contrôle du mode «i»
� Commandabilité/observabilité jointes� Valeur singulière de Hankel
� Élaboration du critère dynamique� Réécriture du modèle du système
� Écriture du modèle dans la base modale� Représentation d’état dans la base modale
g
g
g
E
F
L
g g g g
co g
ob g g
M X K X u
y X
y q X
δ+ =
= =
= =
&&
( ) ( )2g
g
g
2 E
F
L
ti i i
co
ob g
z diag z diag z u
y z
y q z
ξ ω ω
δ
+ + = Ψ
= = Ψ
= = Ψ
&& &
( )1 1 1
t
m m mx z z z zω ω= & &L
co co
ob g ob
x Ax Bu
y C x
y q C x
δ = + = = = =
&
co co
ob g ob
x Ax Bu
y C x
y q C x
δ = + = = = =
&
iσ
iα
C1
obiiOW gqétat xi
iiCWucoii
OW δétat xi
iieqWδ
� Observabilité correspondante du mode «i»� Transfert de la sortie électrique à mesurer� Élément du grammien d’observabilité
C2
Nouveau critère dynamique orienté mesure3. Synthèse optimale de structures à actionnement et mesure intégrés

Mathieu Grossard - UPMCVendredi 14 octobre 2011 51/64
� Élaboration du critère dynamique� Écriture numérique du critère
� Approche par procédure
C2
ratio seuil≥
pulsations (rad/s)
x
u
δ
Bonne autorité de contrôle pour les k=2 premiers modes
0
pulsations (rad/s)
gq
u
Bonne observabilité des k=2 premiers modes
0
1ω 2ω
C1
min1
max1
i k
j k m
If seuilσ
σ= →
= + →
≥
min1
max max11 1
nk
i k iob i
ij k m j k
Then Jσ σα
σ σ= →
== + → = →
= ⋅
∑
end
Nouveau critère dynamique orienté mesure3. Synthèse optimale de structures à actionnement et mesure intégrés

Mathieu Grossard - UPMCVendredi 14 octobre 2011 52/64
� Optimisation multi-critères� Critère mécanique (J1) : déflexion de sortie� Critère électrique (J2) : charges de mesure induites � Critère dynamique (J3) : observabilité de la sortie à commander
� Paramètres d’optimisation � 1 ≤ Nblocs actifs ≤ 4� 1 ≤ Nblocs sensitifs ≤ 4� 1 ≤ Nnoeuds bloqués ≤ 4� Vact = 200V
δ
Domaine d’optimisation
xδ δ=
gxr
gyr
gzr
Bloc brut PZT18mm
15mm
20mm (largeur du bloc PZT)
20m
m (
haut
eur
du b
loc
PZ
T)
Zone réservée à l’encastrement
gqactV
7,5mm
15 mm???
???
b
a
18 mm
Domaine d’optimisation
ddl souhaité pour le nœud de sortie mécanique
? Bloc (passif, actif ou sensitif) à déterminer
Nœud susceptible d’être bloqué
Légende
Hauteur et largeur variables du bloc(a,b)
Cahier des charges du problème d’optimisation3. Synthèse optimale de structures à actionnement et mesure intégrés
Bloc brut
PZT PIC151
20mm
20mm
Mathieu Grossard - UPMCVendredi 14 octobre 2011 53/64
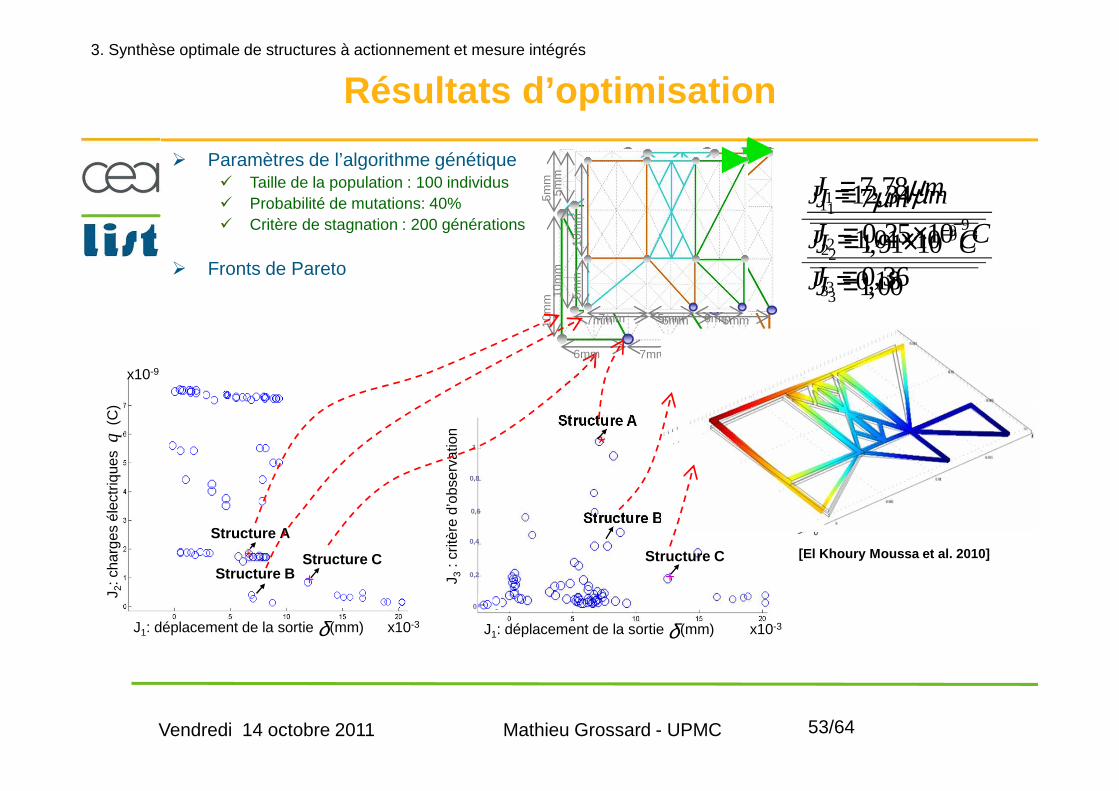
� Paramètres de l’algorithme génétique� Taille de la population : 100 individus� Probabilité de mutations: 40%� Critère de stagnation : 200 générations
� Fronts de Pareto
J1: déplacement de la sortie (mm) x10-3
J 2: c
harg
es é
lect
rique
s q
(C)
x10-9
+ +
*
J1: déplacement de la sortie (mm) x10-3
Structure A
Structure A
Structure BStructure C
Structure B
Structure C
J 3: c
ritèr
e d’
obse
rvat
ion
0
1
0,2
0,4
0,6
0,8
δ δ
5mm
10
mm
7mm 5mm 6mm
1
92
3
12,34
1,01 10
0,18
J m
J C
J
µ−
=
= ×=
7mm 5mm 6mm
5mm
10
mm
1
92
3
7,78
0,25 10
0,36
J m
J C
J
µ−
=
= ×=
7mm 5mm 6mm
5mm
10
mm
1
92
3
7
1,91 10
1,00
J m
J C
J
µ−
=
= ×=
[El Khoury Moussa et al. 2010]
Résultats d’optimisation3. Synthèse optimale de structures à actionnement et mesure intégrés

Mathieu Grossard - UPMCVendredi 14 octobre 2011 54/64
� Analyse des performances dynamiques
Pulsation (rad/s)
Pulsation (rad/s)
Amplitude (dB)
Amplitude (dB)
( )( )s
u s
δ
( )( )
gq s
u s
Dominance des k=2 modes satisfaite pour les 3 structuresC1
C2 Observabilité des modes dominants reflétée par la valeur de :obJ
( )3CJ ( )
3BJ< ( )
3AJ<
Analyse fréquentielle3. Synthèse optimale de structures à actionnement et mesure intégrés

Mathieu Grossard - UPMCVendredi 14 octobre 2011 55/64Mathieu Grossard - UPMCVendredi 14 octobre 2011
� Post-traitement
� Performances� Sortie en déplacement
� Charges électriques induites
� Comportement fréquentiel préservé
/ 12,04%FlexIn Comsolécart =
/ 15,11%FlexIn Comsolécart =
2ω1ωPulsation (rad/s)
Pulsation (rad/s)
Validation en simulation3. Synthèse optimale de structures à actionnement et mesure intégrés

Mathieu Grossard - UPMCVendredi 14 octobre 2011 56/64
� Protocole expérimental
1cm
x
y z
Connexion électrique de mesure
Connexion électrique d’actionnement
Encastrement isolant
Capteur Laser
Filtres anti-repliement
Acquisition
Commande
Tension d’actionnement
Amplificateur de tension
δ
gqactV
Circuit de mesure
Protocole expérimental3. Synthèse optimale de structures à actionnement et mesure intégrés
Fréquence (rad/s)
Am
plitu
de (
dB)
Transfert de charges mesuré
Transfert de déflexion mesuré
Fréquence (rad/s)
Am
plitu
de (
dB)
1nω
2nω
Mathieu Grossard - UPMCVendredi 14 octobre 2011 57/64
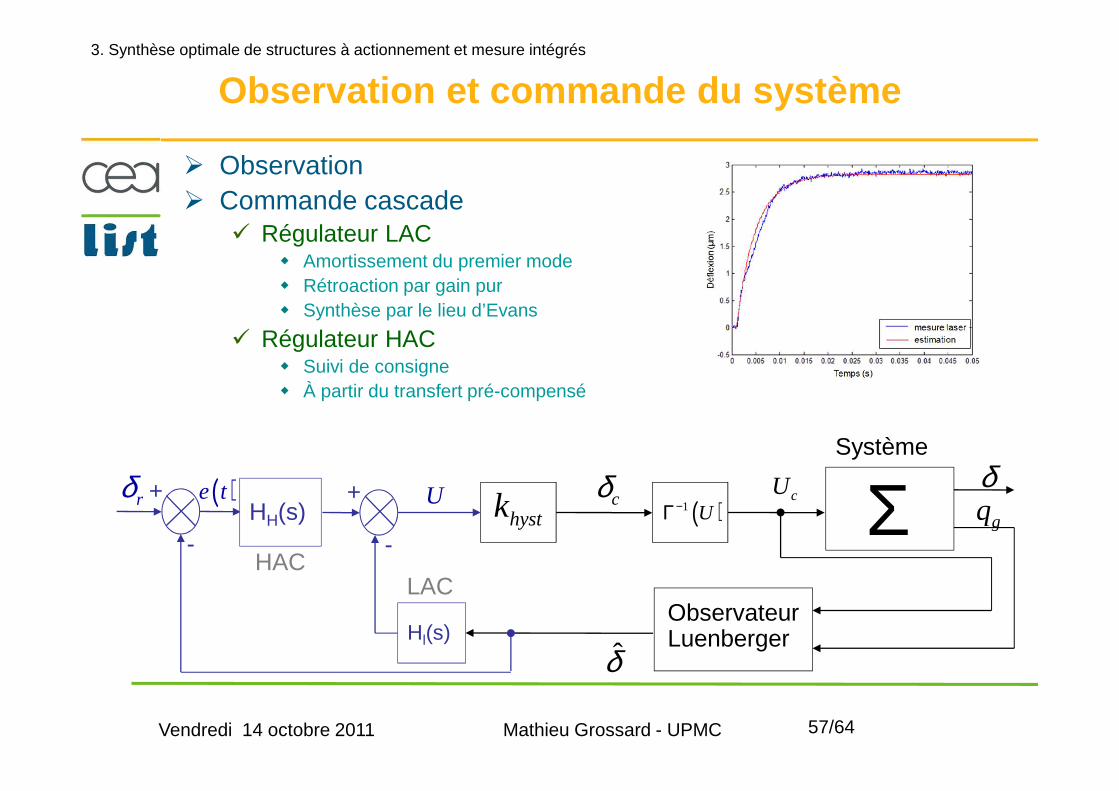
Observation et commande du système3. Synthèse optimale de structures à actionnement et mesure intégrés
� Observation� Commande cascade
� Régulateur LAC� Amortissement du premier mode� Rétroaction par gain pur� Synthèse par le lieu d’Evans
� Régulateur HAC� Suivi de consigne� À partir du transfert pré-compensé
( )1 U−Γ
Observateur Luenberger
cδ δgq
cU
δ̂
ΣSystème
hystk
Hl(s)
+
-
U
LAC
+HH(s)
-
rδ ( )e t
HAC

Mathieu Grossard - UPMCVendredi 14 octobre 2011 58/64
� Performances
� tr5% = 11,7ms� Robustesse
Temps (s)
Déf
lexi
on
(µm
)
mesure laser
estimation corrigée
Temps (s)D
éfle
xion
(µm
)
mesure laser
estimationréférence
26
77
gM dB
Mϕ
>
> o
Observation et commande du système3. Synthèse optimale de structures à actionnement et mesure intégrés

Mathieu Grossard - UPMCVendredi 14 octobre 2011 59/64
Plan
1. Présentation de la méthode des blocs
2. Synthèse optimale de structures à actionnement inté gré
3. Synthèse optimale de structures à actionnement et m esure intégrés
4. Autre exemple d’utilisation de la méthode
5. Conclusion et perspectives

Mathieu Grossard - UPMCVendredi 14 octobre 2011 60/64
16,38
1
4,15
14,70
1
C
B
A
Optimisation de micro -amplificateurs flexibles
� Methodologies existantes � expériences du concepteur� méthodes topologiques
� statique� régime harmonique prédéfini
� Optimisation de la réponse dynamique� conception de systèmes opérant en
boucle ouverte� amplification du débattement� ajout de critères sur le positionnement
et l’amplitude des résonances� rejet de modes résonants entrée/sortie� filtrage mécanique passif des vibrations
support/sortie
5. Autre exemple d’utilisation de la méthode
Mathieu Grossard - UPMCVendredi 14 octobre 2011 61/64Mathieu Grossard - UPMCVendredi 14 octobre 2011
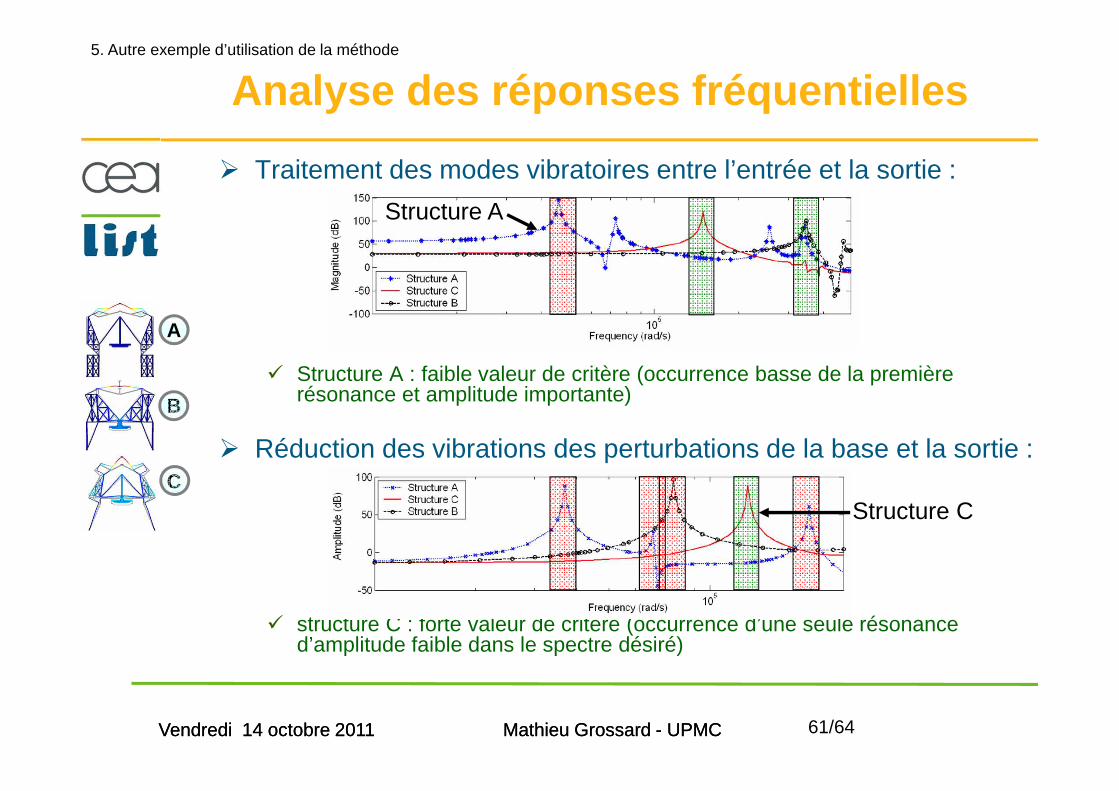
� Traitement des modes vibratoires entre l’entrée et la sortie :
� Structure A : faible valeur de critère (occurrence basse de la première résonance et amplitude importante)
� Réduction des vibrations des perturbations de la base et la sortie :
� structure C : forte valeur de critère (occurrence d’une seule résonance d’amplitude faible dans le spectre désiré)
C
B
A
Analyse des réponses fréquentielles5. Autre exemple d’utilisation de la méthode
Structure A
Structure C

Mathieu Grossard - UPMCVendredi 14 octobre 2011 62/64
Plan
1. Présentation de la méthode des blocs
2. Synthèse optimale de structures à actionnement inté gré
3. Synthèse optimale de structures à actionnement et m esure intégrés
4. Autre exemple d’utilisation de la méthode
5. Conclusion et perspectives

Mathieu Grossard - UPMCVendredi 14 octobre 2011 63/64
Conclusion
� Nouvel outil de conception optimale pluridisciplinaire prenant en compte simultanément des considérations mécanique et automatique
� Vers les “systems on chip”
6. Conclusion et perspectives
[Femto-st/CEA LIST 07]
Mathieu Grossard - UPMCVendredi 14 octobre 2011 64/64
Synthèse optimale de structures flexibles à transdu ction piézoélectrique intégrée
–Applications en micromanipulation
Séminaire
Mathieu GROSSARD