Embed Size (px)
Citation preview
Position du problème et modélisation Méthodes numériques Quelques exemples Conclusions et perspectives
Solveur itératif pour la résolution desystèmes couplés fluide structure
Couplage Code_Saturne Code_Aster Salomé YACS
Elisabeth Longatte
EDF R&DCollaboration MFEE / SINETICS / AMA / LaMSID
Novembre 2010
Position du problème et modélisation Méthodes numériques Quelques exemples Conclusions et perspectives
Objectifs
1 Position du problème et modélisation
2 Méthodes numériques
3 Quelques exemples
4 Conclusions et perspectives
Position du problème et modélisation Méthodes numériques Quelques exemples Conclusions et perspectives
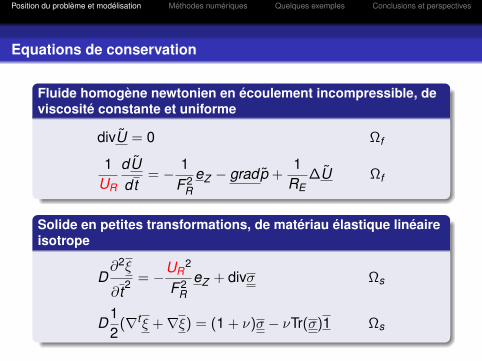
Equations de conservation
Fluide homogène newtonien en écoulement incompressible, deviscosité constante et uniforme
divU = 0 Ωf
1UR
dUdt
= − 1F 2
ReZ − gradp +
1RE
∆U Ωf
Solide en petites transformations, de matériau élastique linéaireisotrope
D∂2ξ
∂t2 = −UR2
F 2R
eZ + divσ Ωs
D12(∇tξ +∇ξ) = (1 + ν)σ − νTr(σ)1 Ωs
Position du problème et modélisation Méthodes numériques Quelques exemples Conclusions et perspectives
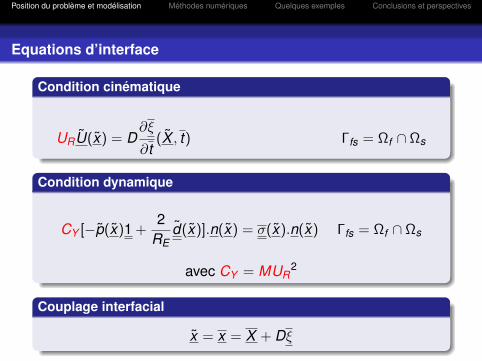
Equations d’interface
Condition cinématique
URU(x) = D∂ξ
∂t(X , t) Γfs = Ωf ∩ Ωs
Condition dynamique
CY [−p(x)1 +2
REd(x)].n(x) = σ(x).n(x) Γfs = Ωf ∩ Ωs
avec CY = MUR2
Couplage interfacial
x = x = X + Dξ
Position du problème et modélisation Méthodes numériques Quelques exemples Conclusions et perspectives
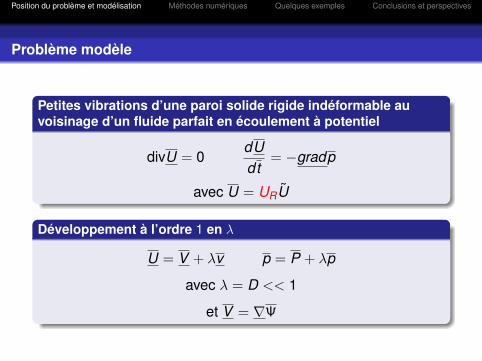
Problème modèle
Petites vibrations d’une paroi solide rigide indéformable auvoisinage d’un fluide parfait en écoulement à potentiel
divU = 0dUdt
= −gradp
avec U = URU
Développement à l’ordre 1 en λ
U = V + λv p = P + λp
avec λ = D << 1
et V = ∇Ψ
Position du problème et modélisation Méthodes numériques Quelques exemples Conclusions et perspectives
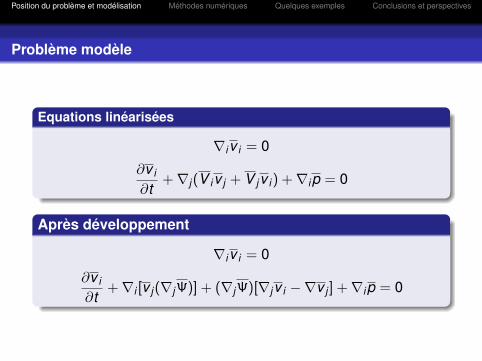
Problème modèle
Equations linéarisées
∇iv i = 0
∂v i
∂t+∇j(V iv j + V jv i) +∇ip = 0
Après développement
∇iv i = 0
∂v i
∂t+∇i [v j(∇jΨ)] + (∇jΨ)[∇jv i −∇v j ] +∇ip = 0
Position du problème et modélisation Méthodes numériques Quelques exemples Conclusions et perspectives
Problème modèle
La solution est de la forme
v i = xi avec v i = −∇i π
π fonction potentielle à moyenne nulle solution de :
∆π = 0
−π − (∇jΨ)(∇j π) + p = 0
Expression de la pression fluctuante
p = π + V .∇π
Position du problème et modélisation Méthodes numériques Quelques exemples Conclusions et perspectives
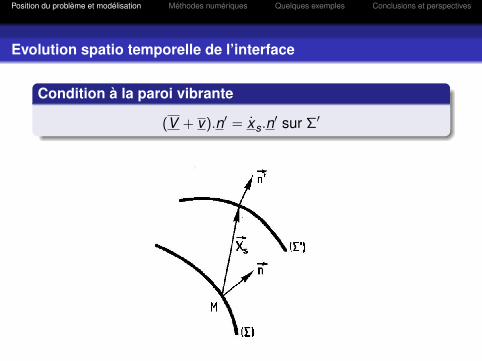
Evolution spatio temporelle de l’interface
Condition à la paroi vibrante
(V + v).n′ = xs.n′ sur Σ′
Position du problème et modélisation Méthodes numériques Quelques exemples Conclusions et perspectives
Condition à la paroi vibrante
Ordre 0
V .n = 0 sur Σ
Ordre 1
[(V + v).n′]|Σ′ =
V (M).n + V (M).(n′ − n) + [V (M ′)− V (M)].n + (v .n)|Σ
D’où
v .n|Σ = xs.n + V (M).∇Σ(xs.n) + (divΣV )(xs.n)
∂π
∂n |Σ= −xs.n − (divΣV )xs.n − V .∇Σ(xs.n)
Position du problème et modélisation Méthodes numériques Quelques exemples Conclusions et perspectives
Effet du fluide en écoulement sur les mouvements de la structure
Soit une base de modes propres (sans fluide) Xi(r)
xs = Σai(t)X i(r)
Expression de la pression fluctuante
xfi = −∇iπ p = π + V .∇π
∂π
∂n= ˙xs.n − (divV )xs.n − V .∇(xs.n)
implique p(r , t) = Σ[ajΦ1j (r) + ajΦ
2j (r) + ajφ
3j (r)]
Matrice de couplage
F = −[mij ]A + [m′ij ]VA + ([m
′′
ij ]V2o + [m
′′′
ij ]P)A
Position du problème et modélisation Méthodes numériques Quelques exemples Conclusions et perspectives
Résolution du système couplé
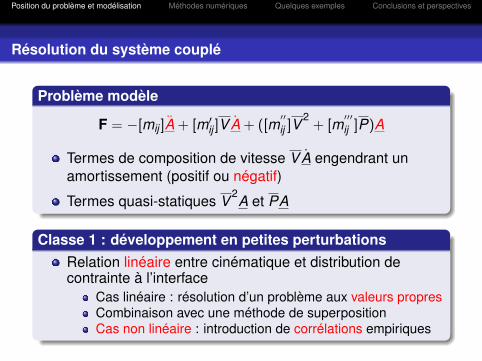
Problème modèle
F = −[mij ]A + [m′ij ]VA + ([m
′′
ij ]V2
+ [m′′′
ij ]P)A
Termes de composition de vitesse VA engendrant unamortissement (positif ou négatif)
Termes quasi-statiques V2A et PA
Classe 1 : développement en petites perturbationsRelation linéaire entre cinématique et distribution decontrainte à l’interface
Cas linéaire : résolution d’un problème aux valeurs propresCombinaison avec une méthode de superpositionCas non linéaire : introduction de corrélations empiriques
Position du problème et modélisation Méthodes numériques Quelques exemples Conclusions et perspectives
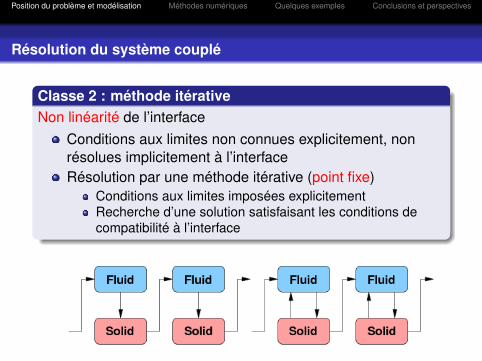
Résolution du système couplé
Classe 2 : méthode itérativeNon linéarité de l’interface
Conditions aux limites non connues explicitement, nonrésolues implicitement à l’interfaceRésolution par une méthode itérative (point fixe)
Conditions aux limites imposées explicitementRecherche d’une solution satisfaisant les conditions decompatibilité à l’interface
Position du problème et modélisation Méthodes numériques Quelques exemples Conclusions et perspectives
Opérateur de Dirichlet Neumann
Méthode itérativeFormulation non linéaireRelaxation, stabilité conditionnelle
Fonction du module de couplageAvancée en temps (convergence, point fixe)Transferts de champs entre modèles fluide et solide(cinématique et contraintes à l’interface)
FFF f = F(uuuifs)
uuuifs = U(FFF f )
uuuifs = U F(uuuifs)
Position du problème et modélisation Méthodes numériques Quelques exemples Conclusions et perspectives
Avancée en temps
Méthode de point fixePrédiction du déplacement de l’interface
uuun+1,kfsi = uuufsi
(uuun+1,k−1
s , uuun+1,k−1s
)Résolution du système fluide
pn+1,k = p(pn,vvvn
f ,uuun+1,kfsi
)vvvn+1,k
f = vvv(pn,vvvn
f ,uuun+1,kfsi
)Calcul des contraintes exercées par le fluide sur la paroisolide
FFF n+1,kf = FFF
(pn+1,k ,vvvn+1,k
f )
Position du problème et modélisation Méthodes numériques Quelques exemples Conclusions et perspectives
Avancée en temps
Méthode de point fixeRésolution du système solide
uuun+1,ks = uuu
(uuun
s , uuuns , uuu
ns ,FFF
n+1,kf
)Convergence sur le déplacement∥∥∥uuun+1,k
s − uuun+1,k−1s
uuun+1,0s
∥∥∥ ≤ ε
Passage à l’itération suivante ou sous itération
Position du problème et modélisation Méthodes numériques Quelques exemples Conclusions et perspectives
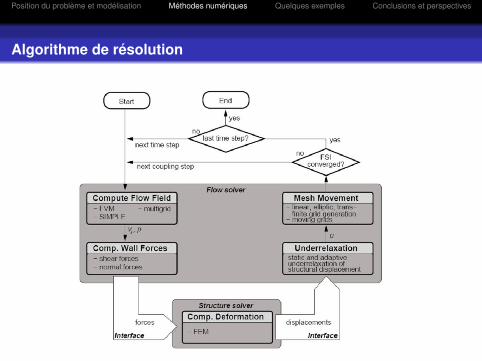
Algorithme de résolution
Position du problème et modélisation Méthodes numériques Quelques exemples Conclusions et perspectives
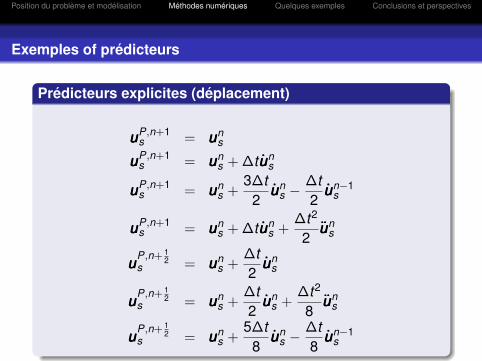
Exemples of prédicteurs
Prédicteurs explicites (déplacement)
uuuP,n+1s = uuun
s
uuuP,n+1s = uuun
s + ∆tuuuns
uuuP,n+1s = uuun
s +3∆t
2uuun
s −∆t2
uuun−1s
uuuP,n+1s = uuun
s + ∆tuuuns +
∆t2
2uuun
s
uuuP,n+ 1
2s = uuun
s +∆t2
uuuns
uuuP,n+ 1
2s = uuun
s +∆t2
uuuns +
∆t2
8uuun
s
uuuP,n+ 1
2s = uuun
s +5∆t
8uuun
s −∆t8
uuun−1s
Position du problème et modélisation Méthodes numériques Quelques exemples Conclusions et perspectives
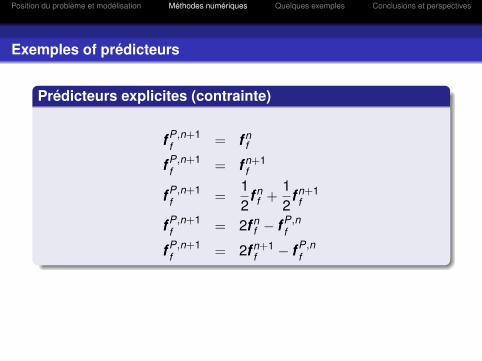
Exemples of prédicteurs
Prédicteurs explicites (contrainte)
fff P,n+1f = fff n
f
fff P,n+1f = fff n+1
f
fff P,n+1f =
12
fff nf +
12
fff n+1f
fff P,n+1f = 2fff n
f − fff P,nf
fff P,n+1f = 2fff n+1
f − fff P,nf
Position du problème et modélisation Méthodes numériques Quelques exemples Conclusions et perspectives
Exemples of prédicteurs
Prédiction correction (déplacement initial)
uuuP,n+1s = uuun
s +3∆t
2uuun
s −∆t2
uuun−1s
Prédiction correction (boucle itérative)
uuuP,n+1,ks = uuun+1,k−1
s
Position du problème et modélisation Méthodes numériques Quelques exemples Conclusions et perspectives
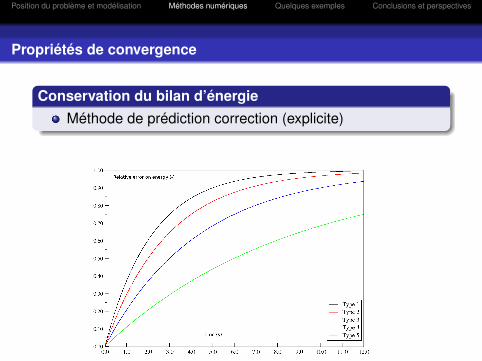
Propriétés de convergence
Conservation du bilan d’énergieMéthode de prédiction correction (explicite)
Position du problème et modélisation Méthodes numériques Quelques exemples Conclusions et perspectives
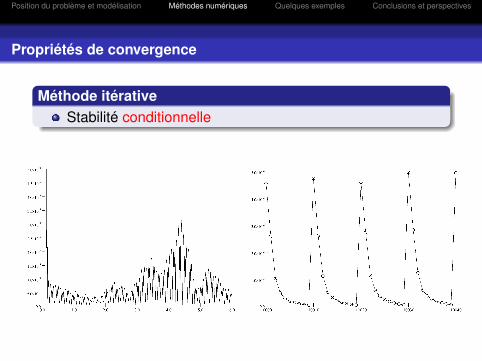
Propriétés de convergence
Méthode itérativeStabilité conditionnelle
Position du problème et modélisation Méthodes numériques Quelques exemples Conclusions et perspectives
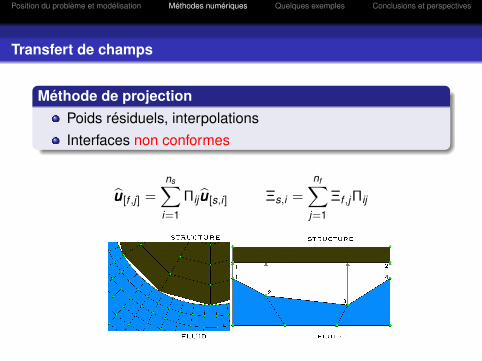
Transfert de champs
Méthode de projectionPoids résiduels, interpolationsInterfaces non conformes
uuu[f ,j] =ns∑
i=1
Πijuuu[s,i] Ξs,i =
nf∑j=1
Ξf ,jΠij
Position du problème et modélisation Méthodes numériques Quelques exemples Conclusions et perspectives
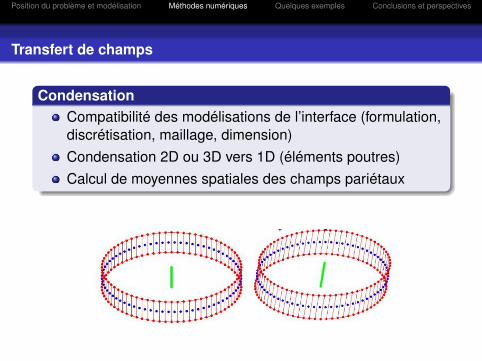
Transfert de champs
CondensationCompatibilité des modélisations de l’interface (formulation,discrétisation, maillage, dimension)Condensation 2D ou 3D vers 1D (éléments poutres)Calcul de moyennes spatiales des champs pariétaux
Position du problème et modélisation Méthodes numériques Quelques exemples Conclusions et perspectives
Module de couplage
Position du problème et modélisation Méthodes numériques Quelques exemples Conclusions et perspectives
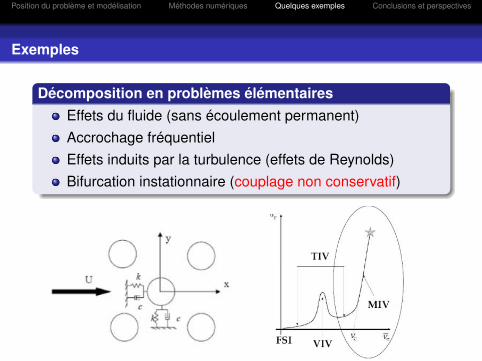
Exemples
Décomposition en problèmes élémentairesEffets du fluide (sans écoulement permanent)Accrochage fréquentielEffets induits par la turbulence (effets de Reynolds)Bifurcation instationnaire (couplage non conservatif)

Position du problème et modélisation Méthodes numériques Quelques exemples Conclusions et perspectives
Exemple 1
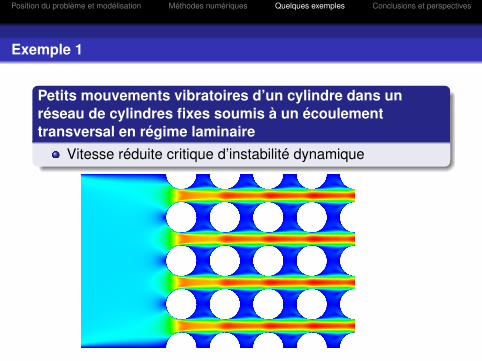
Petits mouvements vibratoires d’un cylindre dans unréseau de cylindres fixes soumis à un écoulementtransversal en régime laminaire
Modélisation
Position du problème et modélisation Méthodes numériques Quelques exemples Conclusions et perspectives
Exemple 1
Petits mouvements vibratoires d’un cylindre dans unréseau de cylindres fixes soumis à un écoulementtransversal en régime laminaire
Vitesse réduite critique d’instabilité dynamique
Position du problème et modélisation Méthodes numériques Quelques exemples Conclusions et perspectives
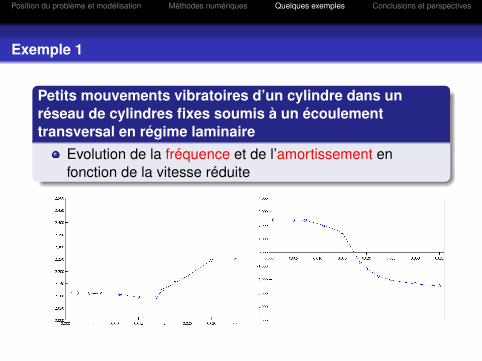
Exemple 1
Petits mouvements vibratoires d’un cylindre dans unréseau de cylindres fixes soumis à un écoulementtransversal en régime laminaire
Evolution de la fréquence et de l’amortissement enfonction de la vitesse réduite
Position du problème et modélisation Méthodes numériques Quelques exemples Conclusions et perspectives
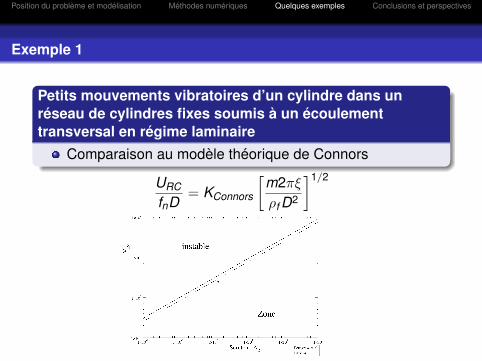
Exemple 1
Petits mouvements vibratoires d’un cylindre dans unréseau de cylindres fixes soumis à un écoulementtransversal en régime laminaire
Comparaison au modèle théorique de Connors
URC
fnD= KConnors
[m2πξ
ρf D2
]1/2
Position du problème et modélisation Méthodes numériques Quelques exemples Conclusions et perspectives
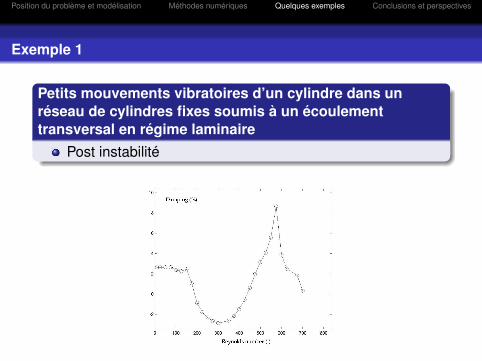
Exemple 1
Petits mouvements vibratoires d’un cylindre dans unréseau de cylindres fixes soumis à un écoulementtransversal en régime laminaire
Post instabilité
Position du problème et modélisation Méthodes numériques Quelques exemples Conclusions et perspectives
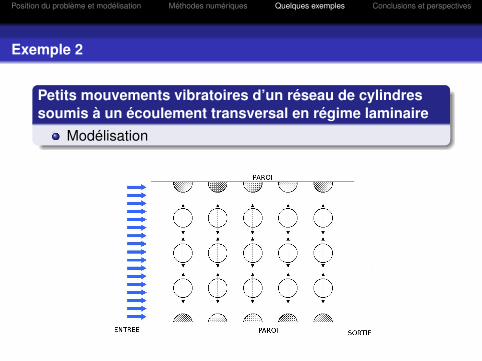
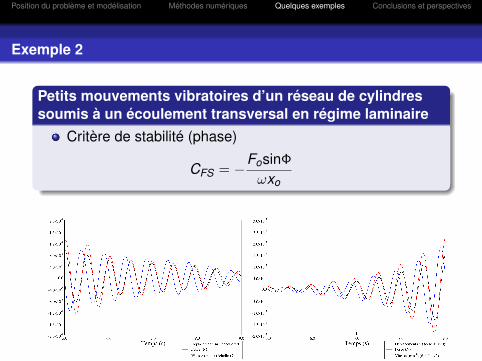
Exemple 2
Petits mouvements vibratoires d’un réseau de cylindressoumis à un écoulement transversal en régime laminaire
Modélisation
Position du problème et modélisation Méthodes numériques Quelques exemples Conclusions et perspectives
Exemple 2
Petits mouvements vibratoires d’un réseau de cylindressoumis à un écoulement transversal en régime laminaire
Critère de stabilité (phase)
CFS = −FosinΦ
ωxo
Position du problème et modélisation Méthodes numériques Quelques exemples Conclusions et perspectives
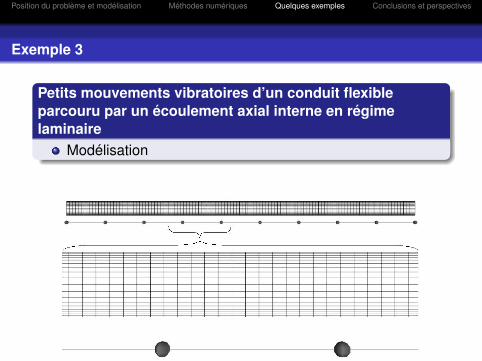
Exemple 3
Petits mouvements vibratoires d’un conduit flexibleparcouru par un écoulement axial interne en régimelaminaire
Modélisation
Position du problème et modélisation Méthodes numériques Quelques exemples Conclusions et perspectives
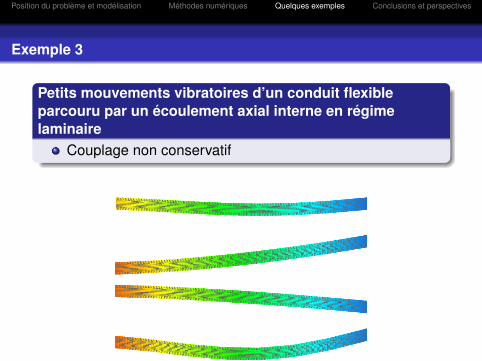
Exemple 3
Petits mouvements vibratoires d’un conduit flexibleparcouru par un écoulement axial interne en régimelaminaire
Couplage non conservatif
Position du problème et modélisation Méthodes numériques Quelques exemples Conclusions et perspectives
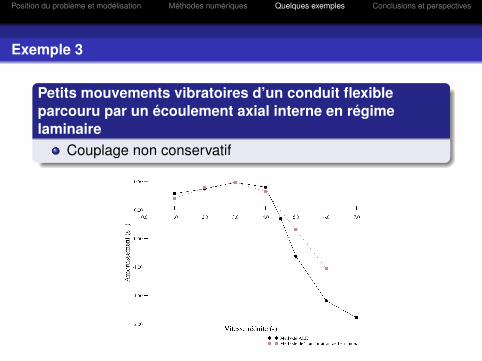
Exemple 3
Petits mouvements vibratoires d’un conduit flexibleparcouru par un écoulement axial interne en régimelaminaire
Couplage non conservatif

Position du problème et modélisation Méthodes numériques Quelques exemples Conclusions et perspectives
Exemple 4
Vibrations induites par le sillage d’un cylindre rigidesoumis à un écoulement transverse turbulent
Modélisation LES (Re = 3900)
Position du problème et modélisation Méthodes numériques Quelques exemples Conclusions et perspectives
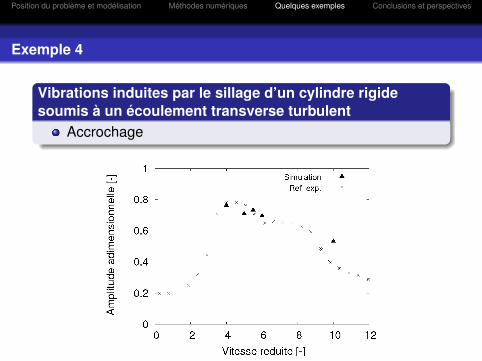
Exemple 4
Vibrations induites par le sillage d’un cylindre rigidesoumis à un écoulement transverse turbulent
Accrochage
Position du problème et modélisation Méthodes numériques Quelques exemples Conclusions et perspectives
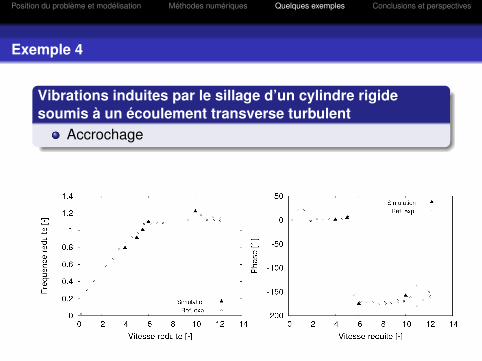
Exemple 4
Vibrations induites par le sillage d’un cylindre rigidesoumis à un écoulement transverse turbulent
Accrochage
Position du problème et modélisation Méthodes numériques Quelques exemples Conclusions et perspectives
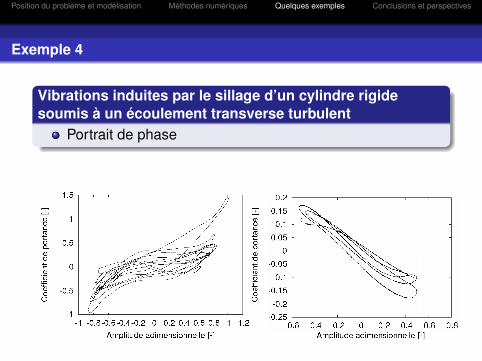
Exemple 4
Vibrations induites par le sillage d’un cylindre rigidesoumis à un écoulement transverse turbulent
Portrait de phase

Position du problème et modélisation Méthodes numériques Quelques exemples Conclusions et perspectives
Exemple 5
Petits mouvements vibratoires d’un réseau de cylindressoumis à un écoulement transverse turbulent
Modélisation
Position du problème et modélisation Méthodes numériques Quelques exemples Conclusions et perspectives
Conclusions et perspectives
SynthèseModule de couplage
Démonstrateur prototypeAdhérence aux versions de développement deCode_Saturne, Code_Aster et SaloméPerformance, CPU, parallélisme
Verrous à leverPassage à l’échelle réelle
Réduction de modèleHomogénéisationCouplage de modèles (micro macro, hybride RANS LES)




![Élimination des conditions aux limites dualisées...L'élimination des conditions aux limites est réalisée soit par l'utilisation du mot-clef ELIM_LAGR dans SOLVEUR [U4.50.01],](https://img.pdfslide.fr/doc/110x75/5e8de3a8011c9f3d124fb1ac/limination-des-conditions-aux-limites-dualises-llimination-des-conditions.jpg)