Embed Size (px)
Citation preview

Introduction Les signaux discrets La modelisation des systemes lineaires discrets
Systemes et asservissements lineaires echantillonnes
Frederic Gouaisbaut
LAAS-CNRSTel : 05 61 33 63 07
email : [email protected]: www .laas.fr/ ∼ fgouaisb, fredgouaisbaut.free.fr
February 28, 2008

Introduction Les signaux discrets La modelisation des systemes lineaires discrets
Sommaire
1 IntroductionOriginesProblematique
2 Les signaux discretsTransformee en ZTheoreme de Shannon
3 La modelisation des systemes lineaires discretsDefinition des systemes lineaires discretsUn systeme vu comme un produit de convolutionLes equations aux recurrenceLa Fonction de transfert en ZLa Fonction de transfert echantillonnee

Introduction Les signaux discrets La modelisation des systemes lineaires discrets
Origines
- Depuis 30 ans, commandes implantees sur un calculateur numerique.
- Mode de regulation appelee numerique par opposition a la commandeanalogique.
- En general, processus continu (variables evoluant d’une manierecontinue), exemples : avion, lanceur, dirigeable, etc...
- Systemes intrinsequement discrets (economie, finance ...)
Pour/contre
- Souplesse d’emploi, precision, insensibilite aux bruits, fiabilite.
- Pertes de performances dynamiques, problemes de compatibilite,necessite des conversions analogiques, numeriques.
Utilisation des commandes continues : discretisationTheorie appropriee a la nature numerique

Introduction Les signaux discrets La modelisation des systemes lineaires discrets
Principe de la regulation “numerique”
- Processus a asservir : generalement a temps continu.
Algorithme de resolution implante sur un calculateur numerique qui varealiser une commande numerique (suite de nombre cadencee a uneperiode d’echantillonnage).
C.A.N : Echantillonnage des variations mesurees sur le processuscontinu, transmis au calculateur.
C.N.A : transforme le signal discret en signal continu (transmis auprocessus continu).

Introduction Les signaux discrets La modelisation des systemes lineaires discrets
Exemple
Example
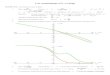
Soit le systeme G (p) = 23p+23 asservi par l’intermediaire d’un correcteur
integral K (p) = 1p . La loi de commande a concevoir est ainsi u(t) = ε(t).
Celle ci est soit realisee de maniere analogique a l’aide d’A.O., soit realiseepar l’intermediaire d’un calculateur.Dans ce dernier cas, on discretise la loi decommande en choisissant que u(t) = u(t)−u(t−T )
T . Nous obtenons alors lesdifferentes courbes de simulation:
0 1 2 3 4 5 6 7 8 9 100
0.2
0.4
0.6
0.8
1
1.2
1.4
temps
ampl
itude
commande analogique
commandenumerique
T=0.1
commandenumerique
T=0.5
0 1 2 3 4 5 6 7 8 9 100
0.2
0.4
0.6
0.8
1
1.2
1.4
temps
ampl
itude
de
la c
omm
ande
commande analogique
commande numerique, T=0.1
commande numerique, T=0.5

Introduction Les signaux discrets La modelisation des systemes lineaires discrets
Exemple
Probleme du choix de T
Probleme du choix de la methode de discretisation du correcteur.
D’une maniere plus generale, probleme de la synthese de correcteursadaptes au numerique.
Probleme du melange entre les signaux discrets et continus.
→ Consequence sur les reponses temporelles,sur les performances du systeme asservi.

Introduction Les signaux discrets La modelisation des systemes lineaires discrets
differentes architectures
modele dynamique a temps continu :
+_
e(t)CAN
e(k)calculateur
u(k)
horloge
u(t) y(t)
régulateur
procédé continu
r(t)(B0Z)CNA
modele dynamique a temps discret (echantillonne)
calculateurprocédé continu CAN
+_
r(k) e(k) u(k) u(t) y(t) y(k)
procédé discrétisé
horloge
CNA(B0Z)

Introduction Les signaux discrets La modelisation des systemes lineaires discrets
Definitions d’un signal analogique
Fonction de f : R → R.
x :
{R → R
t �→ x(t)
t
f(t)

Introduction Les signaux discrets La modelisation des systemes lineaires discrets
Definitions d’un signal discret
Un signal discret correspond a un signal qui ne prend des valeurs que pourdes instants discrets, c’est a dire en des points distincts.
x :
{I → R
i �→ x(i)
ou I est un ensemble prenant des valeurs discretes I = {1, 2, 3, 4, 5, 6...} ouI = {1.1, 3.3, 5.5, 7.7, 9.9, ...}. Remarquons que ce signal n’est pas definipour des valeurs differentes de tk .

Introduction Les signaux discrets La modelisation des systemes lineaires discrets
Definitions d’un signal echantillonne
Signal continu observe a des instants discrets I = {tk , k ∈ N}, on obtient unsignal discret. Dans ce cas, on parle plutot de signaux echantillonnes, c’est adire provenant de l’echantillonnage d’un signal continu.
t1 t2 t3 t4 t6 t7 t8t5
f(t)
t
Un signal echantillonne : l’observation ades instants discrets f : tk , k ∈ Z → R designaux continus. Signal discret
xe :
{N → Ri �→ x(ti ) = xi

Introduction Les signaux discrets La modelisation des systemes lineaires discrets
Les instants discrets sont appeles instants d’echantillonnage.En general, la duree entre 2 instants d’echantillonnage est constante:
tk+1 − tk = T
ou T est appelee periode d’echantillonnage. Dans la suite du cours, onconsiderera ainsi que
tk = kT
et on notera sans ambiguite x(tk) = x(kT ) = x(k) = xk

Introduction Les signaux discrets La modelisation des systemes lineaires discrets
Description temporelle des signaux discrets
Par convention l’echantillonnage d’une impulsion est defini par le poids del’impulsion.Ainsi, par exemple : l’echantillonnage de x(t) = xk0δ(t − tk0) avec δ(t − tk0),la distribution de Dirac a l’instant tk0 donne :
xk = xk0δ(k − k0) avecδ(k − k0) = 0 si k �= k0 et δ(k − k0) = 1 si k = k0
k
kx
xk0
1 k02 30

Introduction Les signaux discrets La modelisation des systemes lineaires discrets
Description temporelle des signaux discrets
Un signal discret quelconque peut donc etre represente par une suited’impulsion :
{xk} =+∞∑k=0
xiδ(k−i) =+∞∑k=0
(xi − xi−1)Γ(k−i) avec
Γ(k − i) = 0 si k < i et Γ(k − i) = 1 si k � i

Introduction Les signaux discrets La modelisation des systemes lineaires discrets
La transformee en Z
Definition
La description qui utilise la transformee en z est equivalente pour les signauxdiscrets a la representation frequentielle (basee sur la transformee deLaplace) utilisee pour les signaux continus. Elle est parfois appelee par abusde language “representation frequentielle”.
Definition
La transformee en z du signal discret xk (ou x(KT )) est notee Z(xk) et estdefinie par :
Z(xk) =+∞∑k=0
xkz−k

Introduction Les signaux discrets La modelisation des systemes lineaires discrets
Description d’un signal echantillonnee
0 T kTt t
T
CAN
u(t)
u(t) u*(t)
u*(t)
1 La suite uk correspond au signal u∗(t) (echantillonne de u(t) a laperiode T ) et est defini par:
u∗(t) = u(t)δT (t) =+∞∑k=0
u(kT )δ(t − kT )
2 Sa transformee de Laplace s’ecrit : U∗(p) = L[u∗(t)] =+∞∑k=0
u(kT )e−kTp
3 En posant z = eTp on reconnaıt la Transformee en z :
U(z) =+∞∑k 0
u(kT )z−k

Introduction Les signaux discrets La modelisation des systemes lineaires discrets
Theoreme de Shannon
Theorem (Theoreme de Shannon)
Un signal continu u(t) de frequence maximale f0 est equivalent a sarepresentation echantillonnee si la frequence d’echantillonnage fe est ledouble de f0. La pulsation ωN = 2π
feest appelee pulsation de Nyquist.
fe � 2f0

Introduction Les signaux discrets La modelisation des systemes lineaires discrets
Utilisation du theoreme de Shannon
Remarque
Pour que l’observation echantillonnee d’un signal soit significative, il estnecessaire que la frequence d’echantillonnage soit suffisamment elevee. Eneffet, si la periode d’echantillonnage est trop elevee, l’information contenuedans le signal analogique peut etre irremediablement detruite.
Remarque
En pratique, on prefere un rapport de frequence, au moins superieur a 10entre la frequence d’echantillonnage et la frequence de coupure du signalanalogique. En temporelle, on choisira une periode d’echantillonnage aumoins 10 fois inferieure au temps de monte du signal analogique.

Introduction Les signaux discrets La modelisation des systemes lineaires discrets
Quelques definitions
Definition
Un systeme est dit discret ssi ces entrees et ses sorties dont discrets. Il estdit dynamique si la valeur de la sortie y(k) depend non seulement de l’entreea l’instant k mai aussi des valeurs passees de l’entree. (possiblement desvaleurs futures)
Definition
Un systeme est dit lineaire si celui ci respecte les proprietes de linearite et desuperposition.
Definition
UN systeme discret est dit causal si sa sortie y(k) au temps kT ne dependque des valeurs prises par l’entree pour des instants inferieures a kT

Introduction Les signaux discrets La modelisation des systemes lineaires discrets
Exemples
Example
Soit l’integrateur numerique :
y(k + 1) = y(k) + u(k)T
ou
y(kT + T ) = y(kT ) + u(kT )T
Ce systeme definit un systeme discret lineaire, causal.

Introduction Les signaux discrets La modelisation des systemes lineaires discrets
La reponse impulsionnelle
Soit l’impulsion unite defini par :
δ(k) = δk =
{1 si k = 00 sinon
On definit par ailleurs l’impulsion de Dirac a l’instant k0 par
δ(k − k0) = δk−k0 =
{1 si k = k0
0 sinon
Definition
La reponse d’un systeme discret a une impulsion unite injectee a l’instant k0
est appelee reponse impulsionnelle et est notee
g(k, k0) = g(kT , k0T )
On peut remarquer que la reponse impulsionnelle est une suite qui depend dedeux variables, la premiere concerne le temps d’observation du signal. Laseconde concerne l’instant d’application de l’impulsion unite.

Introduction Les signaux discrets La modelisation des systemes lineaires discrets
Example
Soit l’integrateur numerique :
y(k + 1) = y(k) + u(k)T
ou
y(k) =k−1∑i=0
u(i)T
si y(0) = 0. Or u(i) =
{1 si i = k0
0 sinonet donc nous obtenons
g(kT , k0T ) =
{T si k � k0 + 10 sinon

Introduction Les signaux discrets La modelisation des systemes lineaires discrets
Stationnarite d’un systeme lineaire discret
Definition
Un systeme est dit stationnaire si
g(kT , k0T ) = g(kT + dT , k0T + dT )
On peut alors montrer que la reponse impulsionnelle peut s’ecrire
g(kT , k0T ) = g(kT − k0T ) = g(k − k0)

Introduction Les signaux discrets La modelisation des systemes lineaires discrets
Theorem
Soit un systeme discret, lineaire, causal, stationnaire, alors sa sortie s’exprimecomme un produit de convolution entre l’entree et sa reponse impulsionnelle
y(kT ) =k∑
l=0
u(lT )g(kT − lT )
Example
Calculons la reponse d’un integrateur numerique :
y(kT ) =k∑
l=0
u(lT )g(kT − lT )
or
g(kT − lT ) =
{T si l � k − 10 sinon
et donc y(kT ) =k−1∑l=0
u(lT )T On retrouve bien la formule de l’integrateur.

Introduction Les signaux discrets La modelisation des systemes lineaires discrets
Les equations recurrentes
Modeliser : etablir un modele mathematique reliant les entrees et les sortiesd’un systeme.
k kΣDiscret
{u } {y }
Definition
Un systeme lineaire a temps discret peut etre decrit par un ensembled’equations recurrentes, definit comme suit a l’ordre n (m � n, les sortiesdependent uniquement des evemements passes) :
any(k) + an−1y(k−1) + · · · + a0y(k−n) = bmu(k+m−n) + · · · + b0u(k−n)

Introduction Les signaux discrets La modelisation des systemes lineaires discrets
Formulation adaptee au calcul numerique
Remarque
Le systeme peut etre entierement defini et l’equation recurrente peut etreresolue si l’on precise les condtions initiales : y0, y1, · · · , yn−1, u0, · · · , um−1
Exemples
- Integrateur : yk = yk−1 + Tuk−1 yk0 = y0 +
k0−1∑k=0
ukT
- Retard pur : yk = uk−d

Introduction Les signaux discrets La modelisation des systemes lineaires discrets
La fonction de transfert
Proprietes des transformees en Z
- Linearite : Z(axk + byk) = aX (z) + bY (z), ∀a, b ∈ �- Retard : Z(x(k−1)) = z−1
Z(xk)Generalisation : Z(x(k−r)) = z−r
Z(xk)
- Avance : Z(x(k+1)) = zX (z)− zx0
- Theoreme de la valeur initiale : limz→∞X (z) = x0
- Theoreme de la valeur finale : limz→1
(z − 1)X (z) = x∞
- Theoreme de la somme :∞∑0
x(k) = limz→1
X (z)
- Convolution discrete : Z(∞∑i=0
x(i)y(k−i)) = X (z)Y (z)

Introduction Les signaux discrets La modelisation des systemes lineaires discrets
D‘’efinitions de la fonction de Transfert en Z
Equivalent de la fonction de transfert en continu.
Operateur retard : z , transformee en z :Y (z) = Z[yk ]U(z) = Z[ul ]
Z
F(z)Y(z)U(z)
y(k)u(k) Suite recurrente
yk → Y (z)yk−i → z−iY (z)ul → U(z)ul−j → z−jU(z)
En appliquant le theoreme de convolution :
Y (z) = F (z)U(z)

Introduction Les signaux discrets La modelisation des systemes lineaires discrets
Le lien entre la fonction de transfert et l’equ. recu.
Rappel Eq. Rec.
any(k) + an−1y(k−1) + · · · + a0y(k−n) = bmu(k+m−n) + · · · + b0u(k−n)
Transformee en z :
anY (z)+an−1Z(y(k−1))+· · ·+a0Z(y(k−n)) = bmZ(u(k+m−n))+· · ·+b0Z(u(k−n))
et donc
(an + an−1z−1 + · · · + a0z
−n)Y (z) = (bmzm−n + · · · + b0z−n)U(z)
Fonction de transfert en z :
F (z) =Y (z)
U(z)=
bmzm + · · · + b0
anzn + · · · + a0
Fonction de transfert en z−1 :
F (z) =Y (z)
U(z)=
bmzm−n + · · · + b0z−n
an + · · · + a0z−n

Introduction Les signaux discrets La modelisation des systemes lineaires discrets
Introduction
G(p)T
T
u(t)
U(p) U*(p)
u*(t) y(t)
Y(p)
Y*(p)
y*(t)
La sortie :
Y (p) = G (p)U∗(p) = G (p)+∞∑k=0
u(kT )e−(kT )p = G (p)
+∞∑k=0
u(kT )z−k
Probleme pour manipuler cette expression avec a la fois des p et des zTheoreme de convolution discrete
y(t) = $−1[Y (p)] =+∞∑k=0
u(kT )g(t − kT )
et aux instants d’echantillonnage :
y(nT ) =+∞∑k=0
u(kT )g((n − k)T )

Introduction Les signaux discrets La modelisation des systemes lineaires discrets
F.T. Echantillonnee
Remarque:
- Fonction de transfert : G (p)
- Reponse impulsionnelle : g(t) = L−1[G (p)]
- Fonction de transfert discrete :
G (z) = Z[L−1[G (p)]]
Utilisation du Theoreme de Shannon
Recommandation : fe = 6 a 24 fois fc , fc etant la frequence coupure duprocede.
Exemple : G (p) = 11+τp
Frequence de coupure : fc = 12πτ
62πτ < 1
T < 624πτ

Introduction Les signaux discrets La modelisation des systemes lineaires discrets
Conv. Numerique Analogique (C.N.A) - Bloqueur d’ordre 0
1 Le signal fourni par le calculateur est un signal en escalier.
2 Le systeme commande par l’intermediaire d’un echantilloneur bloqueur.
3 Le but : conserver l’information du signal pendant une periode.
La fonction de transfert B0(p) du bloqueur d’ordre 0 represente latransformee de Laplace de sa reponse impulsionnelle.Soit Γ(t), un echelon de position unitaire :
B0(t) = Γ(t) − Γ(t − T ), (B∗0 (t) = δ(t) − δ(t − T ))
B0(p) =1 − e−Tp
p
Representation en z : B0(z) = 1 − z−1 = z−1z

Introduction Les signaux discrets La modelisation des systemes lineaires discrets
Conv. Numerique Analogique (C.N.A)
B (p)0
k
k
0 k1 2 3 4 50 k1 2 3 4 5
u
u u(t)
u(t)
Bloqueur d’ordre 1
B1(p) =(1 + Tp)(1 − e−Tp)2
Tp2
B (p)1
k
0 k1 2 3 4 5
k
0 k1 2 3 4 5
u
u u(t)
u(t)

Introduction Les signaux discrets La modelisation des systemes lineaires discrets
Fonction de transfert : bloqueur+processus
0
Z [B (p)G(p)]=G(z)0
T
G(p)B (p)U*(p) U(p) Y(p)
Y*(p)
G (z) = Z[B0(p)G (p)] = Z
[1 − e−Tp
pG (p)
]
G (z) = (1 − z−1)Z[
G(p)p
]= z−1
z Z
[G(p)
p
]

Introduction Les signaux discrets La modelisation des systemes lineaires discrets
Exemple
kk
1yu
T
0B (p) p(p+1)
G (z) = Z[B0(p)Gc(p)] =z − 1
zZ
[Gc(p)
p
]decomposition en elements simples
Gc(p)
p=
1
p2(p + 1)=
−1
p+
1
p2+
1
p + 1
Utilisation d’un tableau de transformees elementaires
G (z) =z − 1
z
[− z
z − 1+
Tz
(z − 1)2+
z
z − e−T )
]
G (z) = K(z−b)(z−1)(z−a) , K = e−T − 1 + T , a = e−T , b = 1 − T (1−e−T )
e−T−1+T

Introduction Les signaux discrets La modelisation des systemes lineaires discrets
Composition de F.T.
Theorem
La transformee en z d’un groupement d’elements ne peut etre definiequ’entre deux echantillonneurs.
1G (p)T T T
G (p)2U*(p) Y*(p)
Y (z) = G2(z)G1(z)U(z) = G (z)U(z)
G (p)T
1G (p) 2
T
G (p)G (p)=G(p)
U*(p) Y*(p)
12
Y (z) = G (z)U(z) = Z[G2(p)G1(p)]U(z)