Embed Size (px)
Citation preview

The Rubik’s ProjectMickael Montassier
Departement Informatique IUT Bordeaux [email protected]
PresentationQui n’est pas reste devant son Rubik’s Cubeas’arracher les cheveux pour mettre en place lesderniers cubiks ?
L’id ee de ce projet est la realisation d’un logicielpermettant :
1. la modelisation 3D d’un rubik’s cube et samanipulation;
2. l’acquisition rapide d’un rubik’s cube avec uneWebCam;
3. la resolution d’un rubik’s cubeetape paretape.
Mots-clefs•programmation 3D : Java3D, OpenGL
•acquisition video
•algorithmique de traitement d’images
•algorithmique et programmation
Lienshttp://trucsmaths.free.fr/rubik.htmhttp://www.labri.fr/perso/montassi/rubik.php
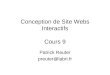
Modelisation 3D et manipulationCe module presente un rubik’s cube virtuel dansun espace 3D et permet de le manipuler commedans la realite.
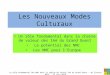
Acquisition par WebCamLe but de ce module est de pourvoirinitialiserrapidement notre rubik’s cube virtuel avec lescouleurs de notre rubik’s cube physique.
Problemes• plateforme systeme utilisee : windows, linux,
MacOSX
•materiel : WebCam + driver
• bibliotheque d’analyse d’images
• conditions d’eclairage
Resolution
Un peu de mathNombre de combinaisons possibles :
43.252.003.274.489.856.000
Un peu de manipulationa, p,g,d,h etb : manipulation qui consiste en unquart de tour dans le sens des aiguilles d’unemontre de la face (resp. avant, posterieur,gauche, droite, haut, bas).a′, p′,g′,d′
,h′ etb′ :manipulation qui consiste en un quart de tourdans le sens inverse des aiguilles d’une montrede la face.a2, p2,g2,d2,h2 etb2 : manipulationqui consiste en un demi-tour de la face.
Quelques generateurs:
Mise en place de la double-couronne
h′a′hahdh′d′ hdh′d′h′a′ha
Mise en place des cubes aretes
ahdh′d′a′ adhd′h′a′ p′d′h′dhp p′h′d′hdp
dp′d′ph2ph2p′ ph2p′h2p′dpd′ h2d′h2dhd′hd d2hap′d2a′phd2
ha′h′g′hga dg′bh′dhb′a2gd′b d2h2d2h2d2h2
Orienter les cubes aretes
h′ad′ha′dg′hp′dh′pd′g d′h2d2hd′h′d′h2gada′g′
Mise en place des cubes sommets
g′hdh′ghd′h′ hdh′g′hd′h′g a(dhd′h′)3a′
Orienter les cubes sommets
d′bdb′d′bdh′d′b′dbd′b′dh hp′h′g′p′ga2g′pghph′a2 (ad′a′d.dh′d′h.ha′h′a)2
Pour aller plus loinCreation d’un robot qui resout tout seul lerubik’cube
RemerciementsMerci a tous mesetudiants pour leur excellenttravail :
Promo DUT 2007Jean-Philippe Arne, Nicolas Comet, Ugo DeMarco, Brice Ducardonnoy, MohamedKerbouche, Quentin Luquet, Soumia Malih,Maxime Ohayon, Bruno Perel, Johanna Royer,Thibaut Sagi, Remy Saint Louboue, PierreTamisier, Baptiste Tricoire
Promo Licence Pro 2007Sebastien Alfaiate, Samuel Duclou, RaphaelRenaudon
Pour venir a l’IUT,Dept. informatique
Contactsweb :
http://www.info.iut.u-bordeaux1.frcourriel :
[email protected]@iut.u-bordeaux1.fr
tel : 05 56 84 57 85