Embed Size (px)
Citation preview

REPUBLIQUE ALGERIENNE DEMOCRATIQUE ET POPULAIRE
MINISTERE DE L’ENSEIGNEMENT SUPERIEUR ET DE LA RECHERCHE SCIENTIFIQUE
UNIVERSITE MENTOURI DE CONSTANTINE
FACULTE DES SCIENCES DE L’INGENIEUR DEPARTEMENT ELECTRONIQUE
N° de série :……. N° d’ordre :……..
THESE
Présentée pour l’obtention du diplôme de Docteur d’Etat
Spécialité : Electronique
Par
MOHAMED ARROUF
Ingénieur d’Etat en Electrotechnique, U.S.T.O Master of Sciences in Power Electronics, U.Bradford, U.K
OPTIMISATION DE L’ENSEMBLE ONDULEUR, MOTEUR ET POMPE
BRANCHE SUR UN GENERATEUR PHOTOVOLTAIQUE
Soutenue le 25/12/2007
Devant le jury : Président : Bader-Eddine Marir Professeur U.Mentouri Constantine Rapporteur : Nour-Eddine Bouguechal Professeur Université de Batna Examinateurs : Hocine Benalla Professeur U.Mentouri Constantine Kamel Srairi Professeur Université de Biskra Abdelhamid Benakcha M.C Université de Biskra Abdelmelek Khazzar M.C U.Mentouri Constantine

REMERCIMENTS
ACKNOWLEDGEMENTS
I wish to express my sincere gratitude to Prof. Nour-Eddine Bouguechal for his
excellent supervision and encouragement throughout this work. I would like to extend my thanks to Examiner’s Jury composed of: - Prof. B.Marir, Université de Constantine
-Prof. H. Benalla, Université de Constantine. - Prof. K.Srairi, Université de Biskra
- Dr. A.Benakcha, Université de Biskra - Dr. A. Khazzar, Université de Constantine My thanks also go to all colleagues from the University of Batna who encouraged me to finish this work

Table of Contents
SOMMAIRE
INTRODUCTION………………………………………………………...…...………1
Chapitre 1
ENERGIE DU SOLEIL 1.1-INTRODUCTION…………………………………….……………….……………………..…...4
1.2-LES RÉSERVES D'ÉNERGIE MONDIALE…………….………………….. ………........4 1.3-TENDANCE D'ÉNERGIE MONDIAL …………………………… …….…….………….4 1.4- LES INSTALLATIONS PHOTOVOLTAIQUES AU MONDE…………………………………5 1.5- LES PREVISIONS MONDIALES EN PHOTOVOLTAIQUE …………………..…...…………7 1.6- PRODUCTION MONDIALES DES CELLULES SOLAIRES…………………..………..……8 1.7- LES AVANTAGES ET LES INCONVÉNIENTS……………………………………………10
1.7.1-LES AVANTAGES.……………………..…………………….…...………………10 1.7.2-LES INCONVÉNIENTS.………….……………………………………………….10
1.8- ÉNERGIE DU SOLEIL SUR L’ALGÉRIE………………………..…………………………..12 1.9-LES APPLICATIONS DE L’ÉNERGIE SOLAIRE …………………..……………….….….…..14
1.9.1-EN VILLE ………....……………………………………………………………….………….14 1.9.2-DANS LES RÉGIONS ISOLEES ………………………...……………………….………….15
1.9.2.1-SYSTÈMES DE POMPAGE PHOTOVOLTAÏQUES………………………..…....………..16 1.9.2.1.1-SPPh AVEC MOTEUR A COURANT CONTINU …………………….………..…17
1.9.2.1.2- SPPh AVEC MOTEUR A COURANT ALTERNATIF….……..….………...….19 1.10-CONCLUSION…………………….……………………………………………….…..………20 1.11-REFERENCES…………………….……………………………………………….….……….21
Chapitre 2
GENERATEUR PHOTOVOLTAIQUE 2.1- CELLULES SOLAIRES………………………………………………………...…………………….23 2.2- MODÈLE DE CELLULES SOLAIRES ………………..………………………………………...23
2.2.1- MODELE SIMPLIFIE A UNE DIODE …………………………..……………………….24 2.2.2- CARACTERISTIQUES COURANT TENSION ……………...………………..…..25
2.2.3- PARAMETRES DE LA CELLULE SOLAIRE …………….……………..………………26 2.2.3.1- COURANT DE COURT CIRCUIT, Icc ……………..……………………...……26 2.2.3.2- TENSION DE CIRCUIT OUVERT, Voc ………………..……………….…….…26 2.2.3.3- FACTOR DE REMPLISSAGE, FF ………….……………………………..……….26
2.2.3.4- LE RENDEMENT DE LA CELLULE ,η…………………………..…………..27

Table of Contents
2.3- MODULE PHOTOVOLTAIQUE……………………………………………………………..27
2.3.1- EFFET DE L’ENSOLEILLEMENT SUR LA CARACTERISTIQUES I-V…..…......….27 2.3.2- EFFET DE LA TEMPERATURE SUR LA CARACTERISTIQUES I-V………….....…..28 2.3.3- MODULES EN SERIE…….………………………….……...……….….……….…...29 2.3.4- MODULES EN PARALLELE …………………...……………………………..…….…......29
2.4- GENERATEUR PHOTOVOLTAIQUE ….……..………………………….…….….………30 2.4.1- EFFET DE L’ENSOLEILLEMENT ET DE TEMPÉRATURE SUR LA
CARACTÉRISTIQUE I-V………………………………………………………..……….……….….31 2.4.2- CARACTÉRISTIQUES (P-V): PUISSANCE-TENSION ………………………………31
2.5- SYSTEMES PHOTOVOLTAIQUES……………………………………...…………………..32 2.6- SUIVEUR DE POINT DE PUISSANCE MAXIMUM (SPPM)…….……….……….………...33
2.6.1- CONVERTISSEUR DC-DC POUR SPPM ………………………….…….……..…34
2.6.1.1- CONVERTISSEUR BOOST ………….……………………………………34
2.6.1.2- CONVERTISSEUR BUCK …..……………….………..……………..……36
2.6.1.3- AVANTAGE DU CONVERTISSEUR BOOST ………………………….….37 2.6.2- CLASSIFICATION DES ALGORITHMES DE POURSUITE ……….….……………38
2.6.2.1- LE CONTROLE INDIRECT “QUASI- SUIVEUR”…….…………..…….…...38 2.6.2.1.1- GENERATEUR PHOTOVOLTAIQUE A CIRCUIT OUVERT….38 2.6.2.1.2- TECHNIQUE AVEC CELULLE TEST A CIRCUIT OUVERT...39
2.6.2.2- CONTROLE DIRECT: THE “TRUE TRACKING”……………..….……..….40 2.6.2.2.1- TECHNIQUES D’ECHANTILLONNAGE ……………..……….40
2.6.2.2.1.1- TECHNIQUE DE CONTRE REACTION DE TENSION
(COURENT)..............................................................................................................41
2.6.2.2.1.2- TECHNIQUE DE PERTURBATION ET
D’OBSERVATION (“P&O”) …………………………………..………………....42 2.6.2.2.1.3-TECHNIQUE DE L’INCREMENTATION DE
CONDUCTANCE (I.C)…………………………………………………………...43 2.6.2.3- TECHNIQUES PAR MODULATION………………..……………...…….….…46
2.7 CONCLUSION…………………………………………………………………………..………48 2.8 REFERENCES…………………………………………..………………………….……………………49

Table of Contents
Chapitre3
MODELISATION ET SIMULATION DE L’ENSEMBLE: G.Ph, ONDULEUR, MOTEUR ET POMPE
3.1-INTRODUCTION…………………………………………………….…………………..51 3.2- SCHEMA SYNOPTIQUE ……………………………………………….………………51 3.3- MODELISATION DU GÉNÉRATEUR Ph........................................................……………51 3.4- MODELISATION DE L’ONDULEUR ……………………………… …..….……..……52 3.5- MODELISATION DU MOTEUR À INDUCTION………………………...……….…….………52 3.6- MODELISATION DE LA POMPE CENTRIFUGE………………………….….….…..………..54
3.6.1-PRINCIPE DE FONCTIONNEMENT ET CONSTRUCTION……………….……..…..….54
3.6.2- CARACTÉRISTIQUES DE LA POMPE CENTRIFUGE……..…..…………………...….56
3.6.2.1- CARACTÉRISTIQUES H(Q)……………………...…………... ….…..56 3.6.2.2- PUISSANCE HYDRAULIQUE...….……………………..………………56
3.6.2.3- CARACTERISTIQUES DU COUPLE………………..………………..…57 3.6.2.4- RENDEMENT DE LA POMPE…………………………………....….…57
3.7- MODELISATION ET SIMULATION DE L’ENSEMBLE: G.Ph, ONDULEUR, MOTEUR ET POMPE ………………………………………………....57
3.7.1- LE MODELE SIMULINK DU G.Ph………….…………..……….………..………...…57 3.7.1.1-SIMULATION………………………………………………...………....57
3.7.2- LE MODÈLE SIMILUNK DU G.Ph ET MPPT………………..……………….58 5.7.2.1-SIMULATION………………………………………………………..…59
3.7.3- LE MODÈLE SUMILINK DE L’ONDULEUR, G.Ph ET MPPT………………….....….59 5.7.3.1-SIMULATION……………………………………….………………………...……61
3.7.4- E MODELE SIMULINK DU MOTEUR -POMPE ………………..………….…...…61 5.7.4.1-SIMULATION………………………………………………………………………62
3.7.5- LE MODELE SIMULINK DE L’ENSEMBLE (G.Ph, ONDULEUR, MOTEUR
ET POMPE)……………………………….. …………………………………………….……………..…….63
3.7.5.1-SIMULATION……………………………….…………………………………...…63
3.8-CONCLUSION………………………………………………………….…………….….64 3.9-REFERENCES…………………………………………………...………………………………….....64

Table of Contents
Chapitre 4
OPTIMISATION DU FONCTIONNEMENT DU GENERATEUR PHOTOVOLTAIQUE
4.1-INTRODUCTION………………………………………..……….………….……………….…...…….65 4.2- CONCEPTION ET REALISATION D’UN SPPM……………….…………….…..…..…….65
4.2.1- SECTION PUISSANCE (CONVERTISSEUR DC-DC).………… ……. ……. . .……….66 4.2.1.1-CIRCUIT D’AIDE A LA COMMUTATION ……………….…………………..68 4.2.1.2- LES PERTES DU CONVERTISSEUR ……………...…………...……………69
4.2.2-SECTION CONTROLE ………………….……….……………………………………70
4.2.2.1- CIRCUIT D’INTERFACE ………………………………….…………71 4.2.2.1.1- CAPTEUR DE COURANT …………………………….….…71 4.2.2.1.2-ISOLATION DU CAPTEUR DE COURENT.…………….………..71 4.2.2.1.3-CIRCUIT D’AMPLIFICATION DU COURANT ………….....…72 4.2.2.1.4-CAPTEUR DE TENSION………….…………………….……………73
4.2.2.2- CIRCUIT DE GACHETTE……………….……………………….……..………73 4.2.2.3-TECHNIQUE DE POURSUITE ………...………………..……………………..75
4.2.3- RESULTATS EXPERIMENTAUX ……………………………………….………….………..…79 4.2.3.1- RENDEMENT DU CONVERTISSEUR BOOST …………………………….…..79 4.2.3.2- PUISSANCE DE SORTIE DU CONVERTISSEUR BOOST ….…………..……….79 4.2.3.3- PERFORMANCE DU SPPM ……..……………………………………..….…..80 4.2.3.4-VALIDATION DE LA POURSUITE DE PUISSANCE MAXIMALE.….…..…….……82
4.3-CONCLUSION………………………………………….…………………………………………….….88 4.4-REFERENCES……………………………………………………………………………….…………..89
Chapter 5
OPTIMISATION DU FONCTIONNEMENT DU MOTEUR ASYNCHRONE
5.1-INTRODUCTION………………………………………………….……………………..90 5.2-TECHNOLOGIE DES MOTEURS………………………………...……………………..90
5.2.1-MOTEUR A COURANT CONTINU……………………….………………………91 5.2.2-MOTEUR SANS BALAIS………………………………….…….……….……….91 5.2.3-MOTEUR A COURANT ALTERNATIF…………………….…………..…………92
5.3- PRINCIPE DE FONCTIONNEMENT DU MOTUR ASYNCHRONE…………………..…..93 5.3.1- TECHNIQUE DE CONTROLE DU MOTEUR…………….……………….….…………..94

Table of Contents
5.4-ONDULEUR…………………….……………………….………………………….……………………97 5.4.1- PRINCIPE DE FONCTIONNEMENT……………………..……...……………….97 5.4.2- L’ONDULEUR REALISE………………………………..…………………….…………….98
5.4.2.1- PARTIE PUISSANCE ………….…………..………………………….98 5.4.2.2- PARTIE CONTROLE ………………………………………………..…………..99 5.4.2.2.1-EV80C196 MCS EVALUATION BOARD ………………………………..99 5.4.2.2.2-GENERATEUR DES SIGNAUX (WFG)…………..………..….……..……..100 5.4.2.2.3-CONVERTISSEUR ANALOGIQUE NUMERIQUE……...………..…...…101
5.5 –GENERATION DES SIGNAUX PWM …….….…………………………..…….……..103 5.5.1-TEMPS MORT.……….…………………………………………..………….….……...……104 5.5.2-TABLEAU DES DONNEES………….….………..……....….….…….……….……………105
5.6-CIRCUIT D’INTERFACE……………………………...….……………….…….…………….……105 5.7-RESULTATS EXPERIMENTAUX ……………..………………….…………………..…..……....106 5.8-CONCLUSION……………………………………………………...……………………………..……110 5.9-REFERENCES…………………………………………………………………...…...…...…………...111
CONCLUSION ………………………………………………..……………………...……………112

Introduction
1
INTRODUCTION
L'utilisation de la conversion photovoltaïque de l'énergie solaire pour faire fonctionner
les pompes à eau est aujourd'hui une technologie en développement, caractérisée par des coûts graduellement en baisse et une association croissante avec la technologie. Depuis la première installation à la fin des années '70, les systèmes de pompage solaires de l'eau pour fournir des approvisionnements domestiques, bétail et irrigation en eau dans des régions éloignées, ont gagné énormément d'acceptation, fiabilité et performance et de nos jours ils appartiennent à la plupart des applications significatives d'énergie photovoltaïque. Ceci est attribué principalement au fait qu'il n'est pas viable économiquement de connecter de tels sites éloignés au réseau électrique national. On estime maintenant que plus de 12000 unités de pompage photovoltaïque composées de différentes configurations ont été utisé dans le monde entier.
La barrière principale à l'utilisation des systèmes de pompage photovoltaïque continue à être leur coût initial élevé. Le coût de l'eau de ces systèmes est directement lié au coût, rendement et à la fiabilité des différents composants de systèmes et au niveau de l'ensoleillement solaire. Tandis que l'amélioration des techniques de fabrication photovoltaïques rentables de module est sans interruption recherchées, leur existence demeure toujours un besoin clair de développement vers des valeurs améliorées de fiabilité et rendement des sous-système de pompage solaires afin d'extraire la puissance maximal du générateur solaire à tout moment. Donc, l’adaptation des composants de système a été d'intérêt à beaucoup de chercheures pendant les dix dernières années.
L’énergie solaire en Algérie représente un potentiel significatif. En effet, le pays reçoit plus que 3000h de soleil par an avec un niveau d’ensoleillement élevé. La moyenne annuelle d'ensoleillement solaire quotidienne varie de 5 à 7 KWh/m2 dans la mesure où des surfaces inclinées aux angles optima sont considérées.
La distribution des systèmes photovoltaïque est due aux programmes nationaux qui ont été entrepris et financiers par le gouvernement. Le premier programme qui a été lancé en 1985 s'appelle ‘le grand programme du sud d'énergie solaire’. Son but était d'installer les unités photovoltaïques autonomes pour différentes applications. La réalisation de ce programme a permis ce qui suit:
- L'électrification de petits villages isolés dans le désert du Sahara. - L’installation des systèmes photovoltaïques de pompage de l'eau. - L’alimentation des répéteurs de télécommunication par des modules photovoltaïques
dans les emplacements lointains.

Introduction
2
Le deuxième programme qui a commencé en 1995 est ‘le programme du sud d'électrification’. Cela fait partie du programme national d'électrification qui a couvert la période: 1995-1998. Le but de ce programme était de fournir de l’électricité aux 216.000 maisons rurales recueillies à 4000 centres. En outre ce programme a visé à fournir de l’électricité a 300 emplacements agricoles placer près des centres considérés. En 1999, le programme national d'énergie renouvelable pour la recherche a été adopté. L'énergie photovoltaïque fait partie significative de ce programme. Les matières principales sont:
- Technologie des cellules solaires cristallines. - Systèmes photovoltaïques et ces composants. - Applications photovoltaïques.
La première génération des systèmes de pompage solaires, en particulier ceux pour les applications à des hauteurs basses et moyennes incorporent des moteur a courant continu a aimant permanant. Ces dernières années, le moteur asynchrone alimenté par un convertisseur de fréquence variable, est devenu le moteur standard pour des applications de pompages solaires dues principalement à sa simplicité, robustesse et faible prix comparé au moteur à courant continu.
Des pompes centrifuges à simple- étage sont fréquemment utilisées pour des hauteurs de moins de 10 mètres. Pour les hauteur élevées, les multi étages centrifuges ou les types a déplacement positifs (piston ou cavité progressive) sont les plus efficaces. Si la pompe est a la surface ou flottante, elle est habituellement fermée, couplée au moteur; submergée, si submergée, la pompe peut être couplée à un moteur submersible ou être tourné par un axe vertical.
La recherche faite dans le travail actuel, traite l'optimisation de l'ensemble: onduleur, moteur et pompe branché sur un générateur photovoltaïque. Comme la croissance rapide des semi-conducteurs et de la technologie numérique, principalement dans la commande des dispositifs et de l'électronique de puissance, a amélioré légèrement le rendement des systèmes photovoltaïques et a réduit son coût. L'optimisation de l'ensemble est basée sur:
- La conception et la réalisation d’un système de poursuite de point de puissance maximal afin d'extraire la puissance maximale du générateur photovoltaïque quelles que soient les variations atmosphériques (ensoleillement et température).
- La conception et la réalisation d'un onduleur fiable et à rendement élevé. - La réalisation de la technique non compliquée et efficace de commande du moteur à
asynchrone couplé à une pompe centrifuge.

Introduction
3
Chapitre 1 traite l'énergie solaire du point de vue installation photovoltaïque dans le monde ces dernières années, l'évolution des technologies des cellules solaires, la production des cellules solaires dans le monde et des installations photovoltaïques futures dans le monde.
Chapitre 2 décrit la cellule solaire, le module, et les panneaux dont le générateur photovoltaïque se compose. Modélisation et simulation des caractéristiques I-V et P-V du générateur photovoltaïque, sont faites dans l'environnement de programmation Matlab/simulink. L'effet de l'ensoleillement et de la température a été considéré. En outre, une classification des techniques d'algorithme de poursuite de point de puissance maximale est présentée avec suffisamment de détail.
Chapitre 3 est concerné par la modélisation et la simulation dans l'environnement de programmation Matlab/simulink de l'ensemble générateur photovoltaïque, onduleur, moteur asynchrone et de la pompe.
Chapitre 4 présente la conception et la réalisation du circuit de poursuite de point de puissance maximale; qui est basé sur le circuit de puissance d’un convertisseur élévateur et l'algorithme de technique de commande Hill Climbing. L'algorithme est mis en application avec le EV 80C196MCS microcontrôleur évaluation board. En outre, les résultats pratiques et simulés du MPPT réalisé, étaient présentés. La validité de l'algorithme développé pour la poursuite du point de la puissance maximale est vérifiée. Chapitre5 traite la technique de commande du moteur asynchrone aussi bien que la réalisation d’un onduleur de tension en PWM. Ce dernier est réalisé sur les bases du module de puissance Mitsubishi des transistors IGBT’s. Le contrôle technique de l'algorithme choisi pour la commande du moteur asynchrone, est développé en langage " C " et mis en application avec EV80C196 MCS. En outre, les résultats expérimentaux qui justifient la validité du programme réalisé de la technique de commande du moteur asynchrone Le manuscrit se termine avec une conclusion générale et des perspectives.

Energie du soleil
4
Chapitre 1
ENERGIE DU SOLEIL
1.1-INTRODUCTION
Pratiquement, toutes les énergies utilisées par l’être humain sont originaires du soleil. L’énergie solaire est absorbée et stockée par les plantes. On utilise cette énergie lorsqu’on brûle le bois ou on mange de la nourriture. Les coups du vent sont dus aux différences de la température de masse de l'air. L'énergie solaire a fourni la puissance de réchauffer l'air. Le soleil propulse aussi les cycles de la chute de pluie qui remplissent des rivières desquelles nous extrayons l'hydroélectricité. Même le pétrole, le charbon et le gaz ont été produits dans les temps préhistoriques par les organismes, en convertissant la lumière du soleil en énergie chimique. Mais nous pouvons aussi recueillir l'énergie du soleil directement pour des fins de chauffage et de production de l’électricité. Dans ce chapitre, on présente les informations essentielles sur l’énergie solaire, particulièrement son échelle, utilisation actuelle et future. 1.2- LES RÉSERVES D'ÉNERGIE MONDIALE
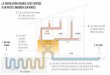
Les réserves des ressources naturelles d’énergie mondiale tel que l’Uranium, le gaz, le pétrole et le charbon par rapport à la demande annuelle sont limités comme l’indique la figure1 [1]. Pour répondre au besoin mondial d’énergie, de nouveaux procédés de recherche sur l’énergie alternative sont accentués. L’un des énergies alternatives qui répond à cette demande, pour le moment, est l’énergie solaire. L’énergie solaire est disponible partout sur la planète, à des degrés divers et entièrement renouvelable. Son apport est variable avec les jours et les saisons, mais elle est relativement prévisible. L'énergie que reçoit la terre est énorme et durable à tel point que l’énergie totale consommée annuellement par le monde entier, est fournie dans un temps aussi court qu’une demi-heure. Pour une journée ensoleillée, les radiations solaires sur terre atteignent 3000 Watts par mètre carré selon l'emplacement. Sur la figure1, en constatant l’énergie annuelle qu’on reçoit du soleil, il est très clair de dire qu’on doit utiliser cette énorme énergie. 1.3-TENDANCE D'ÉNERGIE MONDIALE
Le monde est fortement convaincu par le fait que l’unique énergie alternative à l’énergie naturelle conventionnelle est l’énergie renouvelable, en particulier l’énergie solaire. Par conséquent, la plupart des pays du monde ont introduit l’énergie solaire dans leur politique énergétique. La figure 2 montre la tendance mondiale en matière d’énergie [1], on

Energie du soleil
5
peut constater sur la figure que pour l’an 2050, environ 50% de la production d’énergie, est de type renouvelable et 25% de cette énergie renouvelable sera de l’énergie solaire. Pour l’année 2100, environ 90% de la production d’énergie, sera renouvelable, 70 % de ce pourcentage est de type solaire. On ce basant sur les deux pourcentages mentionnés précédemment, on peut dire que le marché de production d’énergie s’oriente dans la direction de l’énergie photovoltaïque.
Figure1: Les réserves d’énergie mondiale par rapport à la demande annuelle [1].
1.4- INSTALLATIONS PHOTOVOLTAIQUES AU MONDE
Les installations photovoltaïques dans le monde entre 1993 et 2005, sont montrées sur la figure3 [1]. Sur la figure, les courbes expliquent l’évolution des installations photovoltaïques en MW pour les états comme le Japon, l’Allemagne et les Etats-Unis. On constate que ces trois pays sont en première position par rapport au reste du monde. On peut aussi observer sur la figure que les installations commencent par la croissance rapide à partir de l’année 2000, par exemple, l’Allemagne en tête du monde avec 600MW. Au centre de la figure, on constate que les installations annuelles dans le monde atteignent un total de 1223 MW. Les installations anticipées par les pays leaders pour 2010, sont illustrées sur la figure 4. Le Japon en tête du monde avec 4820 MW après l’Europe avec 3000MW et les Etats-Unis avec 2100 MW.
Uranium Natural
Gas
Oil
Coal
Annual Energy from the Sun
Annual Demand
Equ
ival
ent
Sto
ck o
f E
nerg
y S
ourc
e
Sun
Uranium
NaturalGas
Oil
Coal
AnnualDeman
World Energy

Energie du soleil
6
Figure2: La tendance mondiale en énergie [1]
Figure 3 : Les installations photovoltaïques (1993-2005) [1]
Primar
y Energy Supply [EJ/Y]
WBGU: German Advisory Council on Global Change
2080 2090 21002100
Geothermal Other REs
Solar heat
Solar l t i it
Wind Biomass adv
Nuclear PW Coal
Oil
Biomass tradHydro-PW
1,600
1,400
1,200
1,000
800
600
400
200
02000 2010 2020 2030 2040 2050
YEAR
WBGU: German Advisory Council on Global Change
50%
Renewabl 2050 Abou 2100 90%Abou
t
PV
25%
70%
Energ
WBGU’s World Energy Vision 2100 World Energy Trending
Pri
mar
y E
nerg
y S
uppl
y [E
J/Y
]

Energie du soleil
7
Figure 4: les installations photovoltaïques, objectif pour l'année 2010 [1]
1.5- LES PREVISIONS MONDIALES EN PHOTOVOLTAIQUE
La demande mondiale en énergie est en croissance rapide. Les ressources naturelles d’énergie sont en décroissance en raison d'une grande diffusion et développement de l'industrie ces dernières années. L'énergie alternative qui peut accomplir la demande mondiale jusqu'à maintenant c’est énergie solaire. La figure 5 illustre les prévisions du besoin de la demande mondiale d’énergie solaire jusqu’à l'année 2020. On peut constater sur la figure que l’Asie mène le monde avec 15,7 GW suivie par l'Europe avec 12.7GW et les Etats-Unis avec 8.3 GW. La demande totale en énergie photovoltaïque pour l’année 2020 est estimée à 49GW comme mentionné sur le fond de la figure. En plus des pays mentionnés ci-dessus, cette estimation prend en considération le Japon et le reste du monde.
Austral350MW
China500M
South Korea
Japan4,820M
Taiwa21MW
USA 2,100M
Italy 300M
Netherlan1,500MW
Austri70MW
Greec700M
Spain400M
Finlan40MW
Portug150M
Switzerla
31MW
USA 2,100MW
Japan4,820MW
EU 3,000MW
Major Market2010
Cumulative PV Installation Target
Source: NEDO / Marketbuzz 2006 / KC Modified

Energie du soleil
8
Global Demand2020
8.3GW
Market Trending
KSE
KMX
EUROPEJPN
ROWASIAUSA
2005 2010 2015 20201.5GW 3.6GW 26.4GW 49GW
KTSE2020
12.7GW
20205.9GW
202015.7GW
EUROPE
JPN USA
ASIA
KFG
KTST
KSCKC
KAP
KSP
KSB
KSI
1. Markets: PV Demand Forecast 2020
Global Demand2020
8.3GW
Market Trending
KSE
KMX
EUROPEJPN
ROWASIAUSA
2005 2010 2015 20201.5GW 3.6GW 26.4GW 49GW
KTSE2020
12.7GW
20205.9GW
202015.7GW
EUROPE
JPN USA
ASIA
KFG
KTST
KSCKC
KAP
KSP
KSB
KSI
1. Markets: PV Demand Forecast 2020
Figure 5: Les prévisions mondiales de la demande en énergie photovoltaïque pour l’an 2020.
1.6- PRODUCTION MONDIALE DES CELLULES SOLAIRES
La plupart des cellules solaires disponibles sur le marché mondial, sont à base de silicium, soit du type mono ou polycristallin. D'autres types de cellules solaires, qui peuvent être moins chères, ont été récemment développés ou en cours de développement. Il y a eu des avances significatives du développement des techniques qui emploient les couches minces des matériaux de semi-conducteurs tels que le silicium amorphe. D'autres techniques efficaces employant des cellules de couche mince sont intensivement recherchées, en tant que figure 6 par exemple, de Cuivre-indium-Diselenide (CIS) ou de cadmium-telluride (CdTe). La technologie de PVP tirera bénéfice certainement de ces développements à l'avenir.
La fabrication mondiale des cellules solaires se développe plus rapidement ces dernières années, particulièrement par des compagnies Japonaises. Par exemple, la figure 7 montre l’évolution des cellules solaires fabriquées dans le monde de 2001 à 2005. Les pourcentages à droite de la figure indiquent que le Japon est le premier jusqu'ici avec 47 % du total de production de cellule solaire dans le monde. La compagnie Japonaise Kyocera a fabriqué les cellules polycristallines dans l'année 2006 avec un rendement de 18,5% [1].

Energie du soleil
9
Figure6 : Classification des technologies photovoltaïques [1].
Figure7: Production mondiale des cellules solaires (2001-2005) [1]
a-Si Micromorph
Tandem
Organic
Silicon
CompoundSemi
Poly Single
Thin Film Si
CIS / CdTe
DSC
Ribbon
Crystalline
Si
PV Technologies Classification

Energie du soleil
10
1.7- LES AVANTAGES ET LES INCONVÉNIENTS 1.7.1- LES AVANTAGES
1-Le soleil est une source d'énergie propre et renouvelable, qui ne produit ni le gaz ni le déché toxique par son utilisation.
2- Le processus photovoltaïque est complètement à semi-conducteurs et d'un seul bloc. Il n'y a aucune pièce mobile et aucun matériau n'est consommé ou émis.
3- Les systèmes photovoltaïques ont les avantages suivants par rapport aux options de concurrence de puissance:
ils ne font pas de pollution, sans émissions ou odeurs discernables.
ils peuvent être des systèmes autonomes qui actionnent sûrement sans
surveillance pendant de longues périodes.
ils ne consomment aucun carburant, leur carburant est abondant et libre.
ils peuvent être combinés avec d’autres sources d'énergie pour augmenter
la fiabilité de système.
ils n'exigent aucun raccordement à une source d'énergie ou à un
approvisionnement en carburant existant.
1.7.2- LES INCONVÉNIENTS
prix: les cellule solaires sont encore lointaines pour produire une fraction significative de l'énergie du monde requise en raison de la charge de placement initiale. Cependant, le prix diminue considérablement par rapport à la puissance maximale en Watt, depuis les années '70, comme montré sur la figure 8 [2]. rayonnement du soleil: l’intensité d’irradiance du rayonnement du soleil en un
jour, toujours, change et flotte. La figure 9 [3] est un exemple de l'irradiation du mauvais temps. L'irradiation commence autour de 6 heures et augmente à la valeur maximale (se rapproche de 900 W/m2) à 12 AM après que 11 AM, l'irradiation flotte parce que le ciel est plus tardif, nuageux et pluvieux. Ensuite l'intensité d’ensoleillement diminue graduellement. Autour 18 h l’ensoleillement est nulle. Le rayonnement du soleil est une source principale pour le système photovoltaïque, ainsi l'exécution du système photovoltaïque dépend de l'intensité d’ensoleillement Rendement: le rendement de la cellule solaire est relativement bas, 15 % [3] pour le silicium monocristalin et 12 % pour le silicium poly-cristal. En conséquence, pour obtenir la grande capacité

Energie du soleil
11
du générateur solaire, le grand secteur de la cellule solaire et les endroits sont nécessaires. De nouveaux matériels et processus sont recherchés pour remplacer le silicium qui est le matériel principal pour la cellule en silicium mais reste toujours à prix élevé et rendement bas.
Figure8: Tendances de la fabrication des cellules solaire [2]
Figure 9: Intensité du rayonnement du soleil en un jour [3].

Energie du soleil
12
1.8- ÉNERGIE DU SOLEIL EN L’ALGÉRIE L'Algérie est l’un des pays qui ont une diversité de cites dus à son grand secteur,
environ 2,4 millions du kilomètre carré limité par la mer au nord et par le Sahara au sud. Le rayonnement de la région près de la mer est influencé par les saisons. Les zones du nord de l'Algérie sont à ciel - couvert plus que ceux du sud. Les régions Sahariens reçoivent une quantité plus grande d'énergie mais sont caractérisées par une température de l'air plus élevée. En raison de cette diversité dans le climat, l'ensoleillement moyen global au plan horizontal reçu varie entre 4,5 et 7.5 KWh/m2.
En tenant compte de cette diversité, l'Algérie peut être divisée en 8 zones climatiques qui ont approximativement un ensoleillement homogène comme indiqué sur la figure10.
Fig.10: Zones climatiques de l'Algérie [4]
Le site de Batna (zone 3), en Algérie, est l'un des sites où un certain nombre de
projets solaires tels que le pompage, les systèmes d'éclairage, sont déjà mis en application [4]. La durée du soleil est illustrée sur la figure 11. La valeur minimale de la durée de soleil est 9h40 min et la valeur maximale est 14h 22 min. Sur la surface orientée au sud avec un angle d’inclination égal à l’attitude ( 3335.=ϕ ), l'énergie solaire de ce site pour un
ensoleillement moyen d’une journée, est montrée sur figure12. Pour chaque heure, les valeurs l'énergie solaire pour deux mois extrêmes; les mois maximaux et minimaux par an, sont illustrées sur le figure 13.

Energie du soleil
13
02
46
810
1214
16
1 2 3 4 5 6 7 8 9 10 11 12
Months
Dur
atio
n of
day
(hou
rs)
Figure11: Durée du soleil [4]
0
1
2
3
4
5
6
7
1 2 3 4 5 6 7 8 9 1 0 1 1 1 2
Fig.12. Énergie solaire quotidienne ( 33.35=ϕ ) [4]
0100200300400500600700800900
1 2 3 4 5 6 7 8 9 10 11 12
Fig.13: Énergie solaire par heure pour deux mois extrêmes [4] (pour un ensoleillement moyen par jour).Location: Batna.
Months
Hours
August December
Sol
ar e
nerg
y (W
h/m
2 )
Sola
r ene
rgy
(kW
h/m
2 /day
)

Energie du soleil
14
1.9- LES APPLICATIONS D’ÉNERGIE SOLAIRE 1.9.1- EN VILLE
Pour les communautés modernes, l'énergie électrique est la demande de base. Dans les grandes villes et pays, l'énergie électrique est fournie par plusieurs centrales avec des sources d’énergies différentes: fossile, hydraulique, nucléaire et générateur thermique, etc. Le générateur solaire peut également être utilisé comme générateur de puissance. Pour des raisons prix cher, le bas rendement du module photovoltaïque et les fluctuations de l’énergie de sortie, le générateur solaire peut être utilisé seulement en tant que générateur alternatif. Ces générateurs sont généralement connectés ensemble comme indiqué sur la figure14.
IN THE CITY (GRID CONNECTION)
Figure 14 : Interconnections entre le générateur solaire et les autres générateurs
Photovoltaic Generator
Interconnection
Power Plant: -Hydro -Fossil
-Nuclear
Consumers: -Industry -Building
-House -Office

Energie du soleil
15
1.9.2- DANS LES RÉGIONS ISOLEES
Dans le secteur rural [3] et l'espace, l'énergie solaire convient comme source d'énergie
principale parce que les autres sources d'énergies sont limitées. L'intensité de l'irradiation
flotte fortement comme mentionné ci-dessus et la connection au réseaux de service ne peut
pas être employée dans le secteur rural, le stockage d'énergie à temps est inévitable pour
assortir la variation de la demande énergétique. Sur la figure 15, le schéma illustre le
générateur solaire comme le seul générateur électrique principal avec quelques charges.
Comme stockage électrique commun, la batterie est utilisée mais la taille de la batterie est
trop grande comparée avec sa capacité et elle n'est pas amicale à l'environnement.
IN THE RURAL AREA (STAND ALONE) .
Photovoltaic Generator
Direct Use Indirect Use
Load: -Pump -Refrigerator
Matching with Storage -Battery -Tank
Load: -House/Lighting -TV -Communication -Refrigerator -Pump

Energie du soleil
16
En ville, l'énergie solaire est convertie en électricité par les générateurs solaires et
connectée aux réseaux d'électricité, par contre dans le secteur rural, comme illustré sur le
schéma 16, l'énergie solaire est stockée dans le réservoir d’eau et puis employée pour
l'irrigation et d'autres fins.
figure16: Village de campagne [3] 1.9.2.1- SYSTÈMES DE POMPAGE PHOTOVOLTAÏQUES
L'utilisation du photovoltaïque comme source d'énergie pour le pompage d’eau est considérée un des domaines les plus prometteurs d'application de l’énergie solaire. Les systèmes photovoltaïques de pompage d'eau exigent seulement qu'il y ait suffisamment de soleil et une source de l'eau. L'utilisation de l’énergie photovoltaïque pour le pompage d'eau est appropriée, car il y a souvent un rapport normal entre la disponibilité de l'énergie solaire et la demande de l'eau. La demande de l'eau augmente pendant des périodes de temps chaudes où l'intensité du rayonnement solaire est élevée et le rendement des modules solaire est maximal. D' autre part, la demande de l'eau diminue quand le temps est frais et la lumière du soleil est moins intense.
Les systèmes photovoltaïques de pompage d'eau sont particulièrement appropriés à l'approvisionnement en eau dans des régions isolées où aucun approvisionnement de l'électricité n'est disponible. L'eau peut être pompée pendant le jour et stockée dans les réservoirs, pour assurer l’approvisionnement en l'eau la nuit ou quand elle est nuageuse. L'eau pompée peut être employée dans beaucoup d'applications telles que l'utilisation domestique, l’approvisionnement des villages et l'irrigation. Les avantages d'utiliser des pompes d'eau actionnées par les systèmes photovoltaïques incluent le minimum d’entretien, facilité d'installation, fiabilité, et l'assortiment entre la puissances générateur et besoin

Energie du soleil
17
d'utilisation de l'eau. En outre, les réservoirs d'eau peuvent être employés au lieu des batteries dans les systèmes de pompage photovoltaïques. Les éléments habituels d'un système photovoltaïque de pompage de l'eau sont:
Les panneaux solaires pour assurer l’alimentation en électricité du motopompe. Cette alimentation peut être en courant continu comme en courant alternatif, obtenu par la conversion du courant continu en courant alternatif.
Moteur et pompe. Batterie de stockage si nécessaire, pour le stockage de l’électricité et permet le
pompage la nuit et dans des conditions nuageuses. Réservoir de stockage de l’eau. Suiveur de point de puissance maximal (MPPT).
1.9.2.1.1- SPPh AVEC MOTEUR A COURANT CONTINU Le système de pompage photovoltaïque (SPPh) avec moteur à courant continu, dans le cas de couplage direct des panneaux solaires au système moteur-pompe est montré sur la figure17. Ce système est simple et fiable, mais ne fonctionne pas d’une manière continue à son point optimum; cela est du à la variation continue de l’ensoleillement solaire. Pour remédier à cet inconvénient, une batterie de stockage est introduite dans le système comme le montre la figure 18. Dans ce système, la batterie est connectée entre les modules photovoltaïques et le moteur à courant continu. Donc, le moteur fonctionne sous une tension constante et par conséquent, le moteur à courant continu fonctionne au voisinage de son point optimum. Ce système a deux avantages par rapport à celui directement couplé:
L’eau peut être pompée jour et nuit, ainsi la décharge de l'eau est plus grande. Le moteur à courant continu fonctionne à son point optimum; par conséquant, le
rendement du système est amélioré. L’inconvénient majeur d'un tel système c’est le coût supplémentaire et le manque de fiabilité du à la batterie.
Appelbaum [5] a analysé le démarrage et les caractéristiques du régime permanant du moteur à courant continu alimenté par des cellules solaires. Il à été trouvé que le temps de démarrage de n’importe quel type de machine à courant continu alimenté par la source photovoltaïque est plus large. En plus, pour des caractéristiques constantes de charge, le système commence à tourner seulement à niveau d’ensoleillement élevé. Pour les charges aérodynamiques (pompe centrifuge), le système demande des caractéristiques de couple relativement faible et le système commence à tourner pour un niveau d’ensoleillement inférieur. Appelbaum et Sarm [6] ont examiné le démarrage d’un moteur à courant continu

Energie du soleil
18
couplé avec une pompe et alimenté par des modules photovoltaïques avec et sans suiveur de point de puissance maximum. Alghuwainem [7] a étudié le fonctionnement, en régime permanent, du moteur à excitation séparé avec un convertisseur élévateur fonctionnant comme un suiveur de point de puissance maximal (MPPT). Anis et al [8] ont trouvé que la charge se compose du moteur à courant continu couplé avec une pompe à volume constant considéré comme une charge non assorti pour les modules photovoltaïques. Weigner et Al [11] ont étudié l’optimisation du rendement global d’un système de pompage photovoltaïque basé sur un moteur à courant continu. Dans [12], Altas et al ont proposé un algorithme expérimental qui détermine le point de puissance maximale pour les modules photovoltaïques pour n’importe quel ensoleillement et température. Dans [13], Langridge et al ont étudié le fonctionnement d'un système de pompage photovoltaïque direct basé sur un moteur à courant continu sans balais conduisant une pompe à rotor hélicoïdal et la puissance maximale des modules est rendue disponible par une commande appropriée. La tension de référence des modules est basée sur une fraction de la tension à circuit-ouvert. Les performances dynamiques d’un moteur à aimant permanant sans balais alimenté par des modules photovoltaïques, ont été étudiées par Swamy et al [14]. La conception et la réalisation d’un moteur sans balais pour les applications solaires, ont été étudiées par Azoui [15].
Figure17. Système de pompage couplé directement à la source solaire
Photovoltaic Generator
Motor
Pump
Tank

Energie du soleil
19
1.9.2.1.2-SPPh AVEC MOTEUR A COURANT ALTERNATIF
Comme l'utilisation des moteurs à aimant permanent sans balais, est limitée à des systèmes photovoltaïques à faible puissance due à leur coût élevé. Plusieurs systèmes de pompage photovoltaïques basés sur le moteur à induction alimenté, soit par une source de tension ou source de courant ont été proposés, avec des stratégies de commande scalaire et de vecteurs. Ces travaux ont traité de diverses approches d'optimisation, telles que l’amélioration du rendement d'utilisation du module, ou maximiser le débit de la pompe. Bhat et al [16] ont analysé la commande vectorielle d’un moteur asynchrone alimenté à travers un onduleur de tension contrôlé en courant. Le moteur a été commandé ainsi pour améliorer le rendement du système. La puissance maximale du module est arrachée en continu par le hacheur élévateur. Yao et al [17] ont proposé de réaliser une valeur optimale permanente d'efficacité de moteur pour n'importe quel niveau d'ensoleillement avec une commande appropriée de fréquence de l’onduleur de tension. Dans [18], Eskander et al ont étudié le cas où un système de pompage photovoltaïque a basé sur le moteur à induction. Pour une opération brute maximum de transmission mécanique par la commande d'un inverseur de source de tension alimente le moteur. Olorunfini[19] a proposé la coupure et les analyses d'état d'équilibre du moteur à induction alimentées de la source photovoltaïque par un source-inverseur courant et où l'énergie électrique extraite est correctement commandée par le rapport de hachage du convertisseur. Pour l'état d'équilibre, coupant la fréquence de rapport et de glissade de l'inverseur, ont été manoeuvrés pour réaliser une efficacité
Figure18. Système de pompage solaire avec batterie de stockage
Photovoltaic Generator
Motor
Pump
Tank
Battery
Regulator

Energie du soleil
20
maximale. L'analyse de la petite perturbation de signal a prouvé que le système est légèrement atténué pour les tensions de fonctionnement de la rangée qui sont inférieures cela de la tension de rangée correspondant à la puissance maximum de rendement de rangée et au système présente a non - réponse de phase minimum. Dans [20], Nayar et al décrit deux arrangements d'un système de pompage solaire de l'eau à l'aide d'un moteur à induction conduisant une pompe submersible. Dans le premier arrangement, la tension de sortie de panneau a été convertie en A.C. par l’onduleur triphasé PWM. La tension de sortie est amplifiée par un transformateur triphasé avant qu’il soit connecté au moteur. Dans le deuxième arrangement, la tension de panneau a été amplifiée par un convertisseur DC-DC commandé par microcontrôleur. La tension de sortie du convertisseur DC-DC a été, alors, convertie en A.C par l'onduleur PWM. Les principaux systèmes de commande impliqués dans le système, doivent aboutir un fonctionnement V/f. constant. D'autres travaux ont traité le fonctionnement du moteur asynchrone biphasé [21] ou monophasé dans le système de pompage photovoltaïque. 1.10-CONCLUSION
Des informations essentielles sur l'énergie solaire au sujet de son utilisation dans le présent et au futur, dans le monde, ont été présentées dans ce chapitre. Comparée aux actions de l'énergie dans le monde, l'énergie solaire est considérée la seule énergie renouvelable qui peut couvrir la demande mondiale de l'énergie pour aussi longtemps que l'existence du globe. La technologie des cellules solaires se développe rapidement mais le prix de la production est encore élevé par conséquent, l'exploitation de l'énergie solaire jusqu'ici est limitée dans le monde entier. Néanmoins, le Japon, l'Europe et les Etats-Unis poussent pour atteindre une quantité fixe de production d’énergie solaire vers la fin du 21ème siècle.
Le circuit équivalent du générateur solaire et la simulation de ses caractéristiques seront le centre du prochain chapitre.

Energie du soleil
21
1.11-REFERENCES [1] Yakawa.I, ‘Power spirit, JAAUBAS’, Vol 4. 2007 [2] J.M.Koo, ‘Development of a flat-plat solar collector design program’, Master Thesis, University of Wisconsin, 1999. [3] H.Hadi, ‘Photovoltaic water pump system’, PhD thesis university of Kochi, 2003. [4] B.Azoui et al, ‘Sizing and optimization models for photovoltaic pumping system using BLDCM Motor’, AMSE, pp55-69, 2003. [5] J.Appelbaum, ‘ Starting and steady state characteristics of DC motor powered by solar cell generator’, IEEE Trans. On Enrg .Conv.,Vol 1, N° 1,1986 , pp17-25 [6] J. Appelbaum M.S Sarme, ‘The operation of a permanent magnet DC motors powered by a common source solar cells’, IEEE Trans. on energy.conv, Vol 4, pp635-642,1989 [7] S.M .Alghuwainem , ‘ Steady state operation of DC motors supplied from photovoltaic generator with step up converters’, IEEE trans.on Energ. Conv..Vol 7, N°2 pp267-271, 1992. [8] W.R Anis et al, ‘Coupling of a volumetric pump to a photovoltaic array’, Solar cells, Vol.14, pp27-42, 1985. [9] M.M.Said , ‘Matching of a DC motor to photovoltaic generator for maximum daily cross mechanical enrgy , IEEE Trans. On Energ. Conv, vol.3, N°3, 1988, pp465-171. [10] M. Akbaba et al , Matching of Separably excited DC motors to photovoltaic Generators for maximum power output’, Solar Energy, Vol.63 N°6 , 1998,pp:375-385. [11] D.weigner and at levinson ‘Watt pumping optimal operation ’, Electrical Machines and power system, Electric machines and components, Vol 24,N°3, pp277-288,1996. [12] I.H .Altas, A.M Sharaf, A novel on –ligne MPP search algorithm for PV array, IEEE Trans on Energ.Conv., Vol 11, N°4, pp 748-754, 1996. [13] D.Langridge et Al , ‘ Developpement of a photovoltaic pumping system using brushless DC motor and helical rotor pump’, Solar energy, Vol 56,N°2, pp151-160,1996. [14] C.L.P .Swamy and al ‘ Dynamic Performance of a permanent Magnet Brushless DC Motor Powered by a PV Array for water pumping ‘, Solar Energy Materials and solar cells , Vol. 36, 1995, pp:187-200. [15] Azoui.B’Concept and realisation of a three-phase brushless DC motor for solar application’ Docteur d’Etat Es-Science, University of Batna 2002 .[16] S.R.Bhat et al, ‘Performance optimization of induction motor-pump system using photovoltaic energy source ‘, IEEE Tran. On Ind .App ., Vol.23, N° 6, 1987. [17] Y.Yao, P.Bustamente and R.S.Rashaw , ‘ Improvement of induction motor drive systems supplied by photovoltaic array with frequency control’, IEEE tans. On Energ .Conv, Vol9, N°2, 1994

Energie du soleil
22
[18] M.N.Eskander, A.M.Zaki, ‘A Maximum efficiency photovoltaic- induction motor pump system renewable energy’, vol.10, N°.1, 1997. [19] O. Olorumfini , ‘ Analysis of current source induction motor drive fed from photovoltaic energy source’, IEEE Trans .on Energ. Conv., Vol.6 N°1 1991. [20] M. Nayer et al, ‘A grid- interactive photovoltaic uninterruptible power supply using battry storage and buck up diesel generator., IEEE Trans.On Energ.conv., Vol15,N°3, 2003. [21] R.Smith et al, ‘Analysis and performance of novel two phase-drive for Fan and water- pumping application ‘, IEEE Trans on Ind. App., Vol36, N°4, November 1989.

Générateur photovoltaïque
23
Chapitre 2
GENERATEUR PHOTOVOLTAIQUE
2.1-CELLULES SOLAIRES
Les cellules photovoltaïques convertissent les radiations solaires en énergie électrique. Cependant la conversion est limitée par le spectre de la radiation solaire qui peut être utilisée. Afin d'être protégé contre l'eau, le tiret, l'humidité et la chaleur, les cellules solaires sont placées dans une encapsulation en verre plat, simple ou double. A l’heure actuelle, fondamentalement, trois types de technologie sont employés dans la production des cellules solaires: silicium monocristallin, polycristallin et amorphe, avec des rendements qui s’étendent de 15%, 13% et 7% respectivement [1]. 2.2-MODÈLE DE CELLULES SOLAIRES
Les circuits équivalents traditionnels de la cellule solaire, représentés par une source de courant parallèlement à une ou deux diodes sont montrés sur le schéma1. Le modèle simple de diode comprend quatre composants: une source de courant-photo, une diode
parallèle à la source, une résistance en série sR et une résistance de shunt pR . Comme montré
dans figure1 (b), le modèle de double diode inclut une diode additionnelle pour un meilleur ajustement de courbes. Ce modèle exige la connaissance de quatre paramètres aux conditions standards de l’ensoleillement et de la température. Les paramètres sont généralement donnés par le fabricant ou peuvent être obtenus à partir des essais de module sous trois conditions:
courant à court-circuit ( scI ), tension à circuit ouvert ( ocV ) et la tension ( mppV ) et le courant
( mppI ) au point maximum de puissance. Des coefficients de la température sont également
nécessaires dans cette technique de modélisation pour considérer l'effet de la température sur les paramètres importants de la cellule solaire.
D Rp
Rs
Iph ID
+
-
I
IRp V
(a)

Générateur photovoltaïque
24
D1Rp
Rs
D2Iph ID1
+
-
I
IRp VID2
(b)
Figure 1 Circuits équivalents de cellules:(a)modèle simple-diode;(b) modèle double-diode 2.2.1- MODELE SIMPLIFIE A UNE DIODE
Comme montré dans figure.2, le circuit équivalent de la cellule solaire utilisée dans cette étude est encore simplifié en négligeant la résistance shunt. La relation du courant en fonction de la tension peut être approximativement exprimée par des équations(1) à (6) [2, 3]:
D
Rs
Iph ID
+
-
I
V
Figure 2: Modèle simplifié de diode d’une cellule solaire
⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛−⎟⎟
⎠
⎞⎜⎜⎝
⎛−= 1exp1
21
ocsc VC
VCII (1)
Où
⎟⎟⎠
⎞⎜⎜⎝
⎛ −⎟⎟⎠
⎞⎜⎜⎝
⎛−=
oc
mp
sc
mp
VCV
II
C2
1 exp1 (2)
⎟⎟⎠
⎞⎜⎜⎝
⎛−
−=
sc
mp
oc
mp
II
VV
C1ln
1
2 (3)
Pour d'autres niveaux d’ensoleillement G (W/m2) et des températures T (°C), le
modèle décale n'importe quel point ( refref IV , ) des courbes de référence ( )VI − à un nouveau
point ( )IV , sur la base des équations (4) à (8).
refTTT −=Δ (4)

Générateur photovoltaïque
25
screfref
IG
GTG
GI ⎟⎟⎠
⎞⎜⎜⎝
⎛−+Δ⎟
⎟⎠
⎞⎜⎜⎝
⎛=Δ 1α (5)
α : est défini comme un coefficient courant de changement de la température à la référence
ensoleillement [Amp/°C].
IRTV sΔ−Δ−=Δ β (6)
β : est défini en tant que coefficient de tension de changement de la température [V/°C]. III refnew Δ+= (7)
VVV refnew Δ−= (8)
2.2.2-CARACTERISTIQUES COURANT-TENSION
La caractéristique courant-tension (I-V) de la cellule solaire qui présente comment la cellule photovoltaïque réagie à toutes les charges possibles sous des conditions particulières d’ensoleillement et de température, est montrée sur le schéma 3. En observant la caractéristique, on peut voir qu'il y a trois points importants:
Point un (1) correspond au courant maximum que peut fournir la cellule solaire à la tension zéro (courant à court-circuit).
Point trois (2) correspond à la tension maximale de la cellule solaire sans charge; conditions (circuit ouvert).
Point deux (3) correspond à la puissance maximale que peut délivrer la cellule solaire.
0 100 200 300 400 500 6000
100
200
300
400
500
600
700
800
voltage (mV)
curre
nt (m
A)
1
2
3
I II III
Le schéma 3: Caractéristique courant-tension (I-V) d’une cellule solaire.

Générateur photovoltaïque
26
Sans tenir compte de la tension courant (I-V), la caractéristique peut être divisée en trois
intervalles différents:
L’intervalle où, dans une cellule solaire, est considéré en tant que source courant ; comme le courant est constant alors la tension est variable (Intervalle I).
L‘intervalle, où dans une cellule solaire, n’est ni considéré comme source de courant ni une source de tension (intervalle II).
L’intervalle où dans une cellule solaire, est considéré comme une source tension, comme la tension est variable, le courant st constant (intervalle III).
Une fois qu'une cellule solaire est chargée avec une charge résistive constante, la charge est présentée avec un point quelque part sur la caractéristique de cellules d'I-V. Quand la charge augmente, le point de fonctionnement se déplace le long de la caractéristique vers la droite. Cependant, une diminution de la charge fait monter le point de fonctionnement de la caractéristique vers la gauche de la direction. 2.2.3-PARAMETRES DE LA CELLULE SOLAIRE
La cellule solaire est caractérisée par le rendement de conversionη , une tension à
circuit ouvert ocV , un courant à court-circuit ccI et un facteur de suffisance ff . Ces paramètres
sont déterminés à partir des caractéristiques courant-tension. Leurs déterminations permettent les comparaisons de différentes cellules éclairées en conditions identiques. 2.2.3.1-COURANT DE COURT-CIRCUIT, Icc
Le courant de court-circuit est le courant obtenu quand les bornes de cellules sont peu circuitées (V=0 sur le schéma 2). Il augmente linéairement avec l'intensité d'illumination de la cellule et est relié sur la surface éclairée, le spectre du rayonnement solaire et la température. 2.2.3.2-TENSION DE CIRCUIT OUVERT, Voc
La tension de circuit ouvert est obtenue quand le courant de cellules est nul. Il est lié à la résistance de shunt et à la barrière d'énergie. Sa valeur diminue avec la température et change peu avec l'insolation.
2.2.3.3-FACTOR DE SUFFISANCE, FF
Le facteur de suffisance d'une cellule solaire est défini comme le rapport d'une puissance maximale à la puissance calculée en multipliant la tension de circuit-ouvert par le courant de court-circuit. Cela reflète combien de résistances en série et peu de résistances

Générateur photovoltaïque
27
shunt dans la cellule solaire. Pendant que la cellule solaire se dégrade avec l'âge, sa résistance en série tend à augmenter le résultat en un facteur inférieur de suffisance.
ocscopop VIIVFF = (9)
2.2.2.4-RENDEMNT DE LA CELLULE,η
Le rendement d'une cellule solaire est défini comme le rapport de la puissance maximale fournie par la cellule à la puissance lumineuse d'incident.
GAIV opopS =η (10)
A est la surface génératrice en m2 et G l’ensoleillement en W/m2
2.3-MODULE PHOTOVOLTAIQUE
Le module photovoltaïque se compose d'un certain nombre de cellules solaires, qui est installé en série et en parallèle dans une armature comme est représenté sur le schéma 3. Comme le module se compose de groupe de cellules, le modèle d'un module photovoltaïque est basé sur le modèle de cellule solaire. Un nombre important de techniques ont été employés pour simuler la cellule solaire et chaque technique a une certaine simplification et particularité des applications. Dans cette étude, la technique de modélisation est basée sur les données de spécifications fournies dans les « datasheets » des fabricants.
Figure 4: Module photovoltaïque
2.3.1- EFFET DE L’ENSOLEILLEMENT SUR LES CARACTERISTIQUES I-V La figure 5 présente la caractéristique I-V d'un module photovoltaïque pour différents
ensoleillements à la température fixe. Comme on peut voir sur la figure, le courant du module est proportionnel à l’ensoleillement, tandis que la tension de circuit-ouvert change légèrement avec l’ensoleillement.

Générateur photovoltaïque
28
0 5 10 15 20 250
0.5
1
1.5
2
2.5
Voltage(V)
Cur
rent
(A)
1000W/m2
800W/m2
600W/m2
400W/m2
200W/m2
Figure 5: Effet de l’ensoleillement sur la caractéristique du module I-V à T=25°C (marques
en signes croix sur la puissance maximale)
2.3.2-EFFET DE TEMPERATURE SUR LES CHARACTERISTIQUES I-V
On peut observer l'effet de la température sur la caractéristique I-V du module sur la figure 6.Comme est montré sur la figure, la température a un léger effet sur le courant, mais une augmentation de la température cause une diminution apparente sur la tension de circuit- ouvert.
0 5 10 15 20 250
0.5
1
1.5
2
2.5
Voltage(V)
Cur
rent
(A)
T=25°C
T=32°C
T=40°C
Figure 6: Effet de la température sur la caractéristique du module I-V à un ensoleillement
constant (1000W/m2)

Générateur photovoltaïque
29
2.3.3-MODULES EN SERIE
Dans un cas idéal, quand le nombre (n) des modules photovoltaïques identiques sont reliés en série, la tension de circuit-ouvert est égale à la nième tension du module individuel.
La tension de sortie SGV du générateur solaire et du circuit ouvert OCV peut être donnée par
les relations:
nn nSG VVVVVVV +++++== ∑ ...........43211 ( )0fI (11)
OCnOCOCOCSG nVnVnVnVV ===== .....321 ( )0=I (12)
Les caractéristiques courant-tension de N modules identiques en série sont présentées sur la figure 7.
0 50 100 150 200 2500
1
2
3
4
5
6
voltage (V)
curre
nt (A
)
Np=2, Ns=11
Np=2, Ns=8
Np=2, Ns=5
Figure 7: Caractéristiques IV des modules en série aux conditions standards 2.3.4-MODULES EN PARALLELE
Le nombre (n) de modules identiques sont joints en parallèle. La tension résultante
GSV est la même pour chaque module et le courant résultant SGI est la somme des courants
respectifs 1I jusque à nI du module.
nn nSG IIIIII ++++== ∑ .......3211 (13)
nSG VVVVV ===== ......321 (14)
Les caractéristiques courant - tension de N modules identiques en parallèle sont présentées sur la figure 8.

Générateur photovoltaïque
30
0 50 100 150 200 2500
1
2
3
4
5
6
7
8
voltage (V)
curre
nt (A
)Ns=11, Np=1
Ns=11, Np=2
Ns=11, Np=3
Figure 8: Caractéristiques IV de différents modules parallèles pour des cellules à une
température et un ensoleillement constant.
2.4-GENERATEUR PHOTOVOLTAIQUE
Un générateur photovoltaïque se compose d'un certain nombre de modules formés par un certain nombre de cellules photovoltaïques, connectées ensemble en série et en parallèle pour fournir le courant et la tension nécessaires. La performance du générateur dépend de la variabilité des modules que comprend le générateur et les cellules comprises par les modules. La tension de sortie du générateur photovoltaïque dépend du nombre de modules en série alors que le courant de sortie dépend du nombre de modules en parallèle. L'ensemble intégré des modules photovoltaïques ainsi que la structure de soutènement est défini comme rangée photovoltaïque, voir figure 9.
Figure 9: champ photovoltaïque

Générateur photovoltaïque
31
Le courant et la tension de sortie du générateur solaire dans une rangée photovoltaïque sont:
nn nout VVVVVVV .......43211
++++== ∑ (15)
mm mout IIIIIII .......43211
++++== ∑ (16)
La puissance de sortie du générateur solaire (Pout) est donnée par:
( )( )mnm mn nout IIIIIVVVVVIVP .......... 4321432111
+++++++== ∑∑ (17)
2.4.1-EFFET DE L'ENSOLEILLEMENT ET DE TEMPÉRATURE SUR LES CARACTÉRISTIQUES I-V
L'effet double de l’ensoleillement et de la température de cellules sur les caractéristiques I-V, est montré sur la figure 10. On peut observer que la tension de circuit- ouvert diminue légèrement avec l'augmentation de la température de cellules de 25°C à 55°C, tandis que le courant augmente à mesure que l'ensoleillement augmente de 200 W/m2 à 1000 W/m2.
0 50 100 150 200 2500
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
Voltage(V)
Cur
rent
(A)
G=1000W/m2 T=55°C
G=800W/m2 T=44°C
G=600W/m2 T=40
G=400W/m2 T=32°C
G=200W/m2 T=25°C
Figure 10: Variation des caractéristiques I-V avec l'ensoleillement et la température des
cellules
2.4.2-CARACTÉRISTIQUES PUISSANCE-TENSION (P-V) Sans tenir compte des caractéristiques I-V, le générateur photovoltaïque peut être
défini avec ses caractéristiques de tension-puissance (P-V). Figure11(a) montre les caractéristiques photovoltaïques P-V de générateur pour des valeurs différentes d’ensoleillement à une température fixe, alors que la figure11(b) présente les caractéristiques P-V pour différentes valeurs de températures à un ensoleillement fixe.

Générateur photovoltaïque
32
0 50 100 150 200 2500
100
200
300
400
500
600
700
800
900
1000
Voltage(V)
power
(w)
G=1000W/m2
G=800W/m2
G=600W/m2
G=400W/m2
G=200W/m2
a
0 50 100 150 200 2500
100
200
300
400
500
600
700
800
900
1000
Voltage(V)
Pow
er (W
)
25 °C
32 °C
40 °C
b
Figure11: Caractéristiques P-V du générateur pour: différents ensoleillements (a) et
différentes températures de la cellule (b)
De la figure 11(a) et 11(b), on peut observer que la caractéristique P-V a des changements considérables par la variation du niveau d’ensoleillement alors que le changement est légèrement peu avec la variation de la température.
2.5-SYSTEMES PHOTOVOLTAIQUES Les systèmes photovoltaïques peuvent être divisés en trois catégories: autonome,
raccordé au réseau et systèmes hybrides. Pour les endroits qui sont loin du système de production d'électricité conventionnel, des systèmes autonomes d'alimentation en d'énergie photovoltaïque ont été considérés comme une meilleure alternative.

Générateur photovoltaïque
33
Dans ces systèmes, l'exécution du système P-V se fond sur les conditions de fonctionnement. Puis, la puissance maximale extraite à partir du générateur PV dépend fortement de trois facteurs: ensoleillement, impédance de charge et température de cellules; le rendement des cellules est supposée fixe. Néanmoins, les systèmes P-V devraient être conçus pour fonctionner à leurs niveaux de puissance maximum de rendement pour n'importe quelle température et niveau solaire d'irradiation à tout moment. Le dernier facteur significatif qui détermine la puissance de sortie P-V est l'impédance de la charge. Cependant, on devrait noter qu'une telle impédance n'est pas constante. Quand un générateur P-V est directement relié à la charge, le système fonctionnera à l'intersection de la ligne de courbe et de charge I-V qui peut être loin du point maximum de puissance (MPP). La production de puissance maximale est basée sur l'ajustement de ligne de charge sous changement de conditions atmosphériques. D'ailleurs, la charge, dans beaucoup de cas, exige un niveau de puissance qui est maintenue constante. 2.6- SUIVEUR DE POINT MAXIMUM DE PUISSANCE (MPPT)
Afin de surmonter les effets peu désirés sur la puissance de sortie P-V et dessiner sa puissance maximale, il est possible d’insérer un convertisseur DC/DC entre le générateur PV et la charge, qui peuvent commander le suiveur du MPP, sans compter d'inclure les fonctions typiques assignées aux contrôleurs. Ces convertisseurs sont normalement appelés en tant que traqueurs maximum de point de puissance (MPPTs). Ils se composent d'un circuit de topologie et de commande où il y aura un algorithme de suiveurs de MPP. Comme montré sur la figure12, l'entrée de convertisseur DC/DC est la rangée P-V et la sortie est la charge. Le rôle du MPPT est d'assurer le fonctionnement du générateur P-V à son MPP, extrayant la puissance disponible maximale.
PHOTOVOLTAIC GENERATOR
LOADDC/DC CONVERTER Z
+
-
I0
Vpv
+
-
DVpv
Ipv I0
V0
PWMCONTROL
Ipv
Figure12: Schéma fonctionnel général du système P-V avec MPPT.

Générateur photovoltaïque
34
2.6.1-CONVERTISSEURS DC-DC POUR MPPT [4]
Un MPPT peut être conçu baser sur les topologies buck ou boost. Le convertisseur buck est généralement employé pour abaisser la tension de sortie et le convertisseur boost est employé pour obtenir des tensions de sortie plus élevées.
2.6.1.1-CONVERTISSEUR BOOST
Quand le commutateur T est fermé, la diode est polarisée en inverse, le courant traverse l'inducteur L, l'alimentation d'énergie (rangée de cellule solaire) chargeant de ce fait le moteur asynchrone. En même temps, la charge reçoit sa puissance du condensateur éteint C. Quand T est ouvert, le courant découle de l'alimentation de puissance par le moteur asynchrone et la diode D pour recharger le condensateur de sortie, et simultanément, pour assurer la puissance à la charge, figure13. Pour des analyses simplifiées, les prétentions suivantes sont faites:
Tous les éléments sont idéals. Le temps de commutation est beaucoup plus court que la constante électrique
de temps du circuit, donc une approximation linéaire peut être employée. Des formes d'ondes typiques peuvent être vues sur la figure14.
L
T
D
CSolarcellArray
1 2
5
4
VoutVin
IL
Laod
Figure 13: Convertisseur boost

Générateur photovoltaïque
35
Ton Toff
TIL
Ipv Ipv
VLVpv
Vout-Vpv
Vc
Vout Vout
Vswitch
t
t
t
t 13: Formes typiques d'onde du convertisseur boost
Equation de la tension de sortie.
Lors du fonctionnement du convertisseur en régime permanant, la tension moyenne du
moteur synchrone est nulle sur une pleine période T de commutation. En général;
( ) offpvoutonpv tVVtV −= (18)
Et ainsi,
pvoff
offonout V
ttt
V+
= (19)
Où
offon ttT += (20)
Le rapportTton s'appelle le rapport cyclique α et donc
Tton=α . De l’équation (19), la tension
de sortie peut être dérivée:
α−
=1
pvout
VV (21)
Où:
outV : est tension de sortie.
pvV : est la tension d’entré (cellule solaire).

Générateur photovoltaïque
36
ont : est la durée de temps quand le commutateur est fermé.
Charge résistive
Le rapport entre la puissance d'entrée et la puissance de sortie dépend du rapport cyclique. Supposant que le rendement %100=η , alors:
outoutpvpv IVIV = (22)
Et la charge optimale peut être obtenue de l’équation (23)
2)1( α−=
pv
pvload I
VR (23)
2.6.1.2-CONVERTISSEUR BUCK
Une bonne acceptation de l'opération de convertisseur est que la tension d'ondulation de sortie est beaucoup plus petite que la tension de sortie, par conséquent, le courant de charge peut être pris constant et le courant d'ondulation produit par le moteur asynchrone coule dans le condensateur duquel la tension d'ondulation peut être calculée. Le circuit de convertisseur buck est montré sur le schéma 14 alors que la tension typique et les formes d’ondes du courant sont montrées sur le schéma 15.
LT
CSolarcellArray
VoutVin
IL
Laod
41
D
3
2
Figure 14: convertisseur buck

Générateur photovoltaïque
37
Ton Toff
TIL
Iin IL
VL
Vin
Vin-Vout
Vc
Vout
Vswitch
t
t
t
t Figure 15: signaux typiques de convertisseur buck
Equation de la tension de sortie Comme dans l'analyse de convertisseur boost, la tension moyenne du moteur asynchrone est nulle sur une pleine période T de commutation, ainsi nous pouvons écrire:
αinout VV = (24)
Le rapport entre la puissance d'entrée et la puissance de sortie dépend du rapport cyclique. Supposant que le rendement %100=η , donc:
outoutinin IVIV = (25)
et la charge optima peut être obtenue selon:
αint
int
IV
Rload = (26)
2.6.1.3-AVANTAGE DE CONVERTISSEUR BOOST
Malgré le rendement inhérent élevé du convertisseur buck dans les systèmes avec des sources de puissance conventionnelles, le convertisseur boost peut être plus approprié aux systèmes photovoltaïques avec le suiveur du point de puissance maximale (MPPT) puisque le

Générateur photovoltaïque
38
convertisseur fonctionne au mode de courant continu extrayant autant de puissance que possible à partir des cellules solaires. Par conséquent le rendement énergétique du convertisseur boost peut être plus grand que le convertisseur buck. Le convertisseur boost est généralement employé pour obtenir une tension plus élevée de sortie, tandis que le convertisseur buck est employé pour abaisser la tension de sortie. 2.6.2-CLASSIFICATION DE L’ALGORITHME DU SUIVEUR
La classification des algorithmes du suiveur peut être basée sur la fonction des techniques ou des stratégies de commande utilisées. Ainsi, deux catégories peuvent être présentées: méthodes directes et indirectes. 2.6.2.1-LE CONTROLE INDIRECT “QUASI-TRACKERS”
Les techniques indirectes sont basées sur l'utilisation de la base de données des paramètres et des données des courbes typiques du générateur de P-V pour différents irradiances et températures, ou sur l'utilisation des fonctions mathématiques obtenues à partir des données empiriques pour estimer le MPP. Dans la plupart des cas, une évaluation antérieure du générateur de P-V est alors exigée, ou bien elle est basée sur le rapport mathématique obtenu à partir des données empiriques, qui ne rencontrent pas toutes les conditions climatologiques. Les techniques suivantes appartiennent à cette catégorie: courbe-ajustage de précision, table de look-up, générateur ouvert de tension, générateur de P-V de court-circuit et la cellule de circuit-ouvert. 2.6.2.1.1- GENERATEUR PHOTOVOLTAIQUE A CIRCUIT OUVERT
Cet algorithme, utilisé dans [6,7] est basé sur la tension du générateur PV au MPP, qui est approximativement linéaire et proportionnel à sa tension de circuit-ouvert, Voc. La constante de proportionnalité, k1, dépend de la technologie de cellules solaires de technologies de fabrication, du facteur de suffisance et des conditions météorologiques, principalement.
1.1 <≅= constVVK
OC
MPP (27)
Cette propriété peut être mise en application au moyen de l'organigramme montré sur la figure16. Ainsi, la tension du circuit-ouvert du générateur PV est mesurée en interrompant l'opération normale du système avec une certaine fréquence stockant la valeur mesurée. Plu tard, le MPP est calculé selon l'équation (27) et la tension d'opération est ajustée sur le point maximum de tension. Ainsi, ce processus sera répété périodiquement. Bien que cette méthode soit apparemment simple, il est difficile de choisir une valeur optimale du k1 constant.

Générateur photovoltaïque
39
Isolate Photovoltaic generator
Record Open-circuit voltage
Calculate Vmpp from Voc
Wait
Cependant, la littérature [7, 8] signale que la valeur k1 s'étend de 0,73 à 0,80 pour les modules polycristallins de PV aussi bien qu'un intervalle typique du prélèvement de 15ms [7]. Figure16:Organigramme photovoltaïque d'algorithme de générateur de tension du circuit-
ouvert.
Comme l'ajustement de la tension de référence de Voc est choisi comme fraction fixe, supposant qu'il reste constant pour une grande variation de la température et de l’ensoleillement et ne change pas sensiblement avec le vieillissement du champ photovoltaïque, cette technique ne peut pas intégrer dans un des ‘vraie technique du suiveur MPP’. L'exactitude de l'ajustement de la tension d'opération à la tension maximale, MPP, lie au choix de cette fraction, comparé avec la relation réale qui existe entre Vmpp Voc .
Par conséquent, cette technique a comme avantage qui est simple et à bas prix. Elle emploie seulement une boucle de retour. Néanmoins, son inconvénient est que l'exploitation du système interrompu rapporte des pertes de puissance en balayant la gamme de commande entière. Ainsi, la vraie puissance extraite n'est pas considérée comme des panneaux. C'est-à-dire, en tant qu'elle est supposé que pour la tension donnée du circuit-ouvert. Le point maximum est déterminé si le point d'opération est incorrect ou légèrement inexact; la puissance extraite ne sera pas le maximum. 2.6.2.1.2- TECHNIQUE AVEC CELULLE TEST A CIRCUIT OUVERT
Afin d'éviter des inconvénients possibles liés à l'interruption fréquente du système, Z.Salameh[17] a proposé, comme alternative, une utilisation additionnelle d'un essai de cellules. Ainsi, la tension du circuit-ouvert du générateur PV est mesurée à partir de la cellule, qui est électriquement indépendante du reste de la rangée de PV. Les valeurs résultantes k2 seront appliquées au générateur principal de PV.

Générateur photovoltaïque
40
1,,
2 <≅= ConstV
VktestcellOC
MPP (28)
L'avantage de cette méthode c'est qu’elle est simple et économique; elle emploie seulement une commande de boucle de rétroaction. D'ailleurs, elle évite les problèmes provoqués par l'interruption de l'opération de PV présentée dans la technique précédente. Comme inconvénient, on suppose que la cellule d'essai a des convenances identiques à chaque cellule de la force de générateur PV. Par conséquent, Voc de la cellule d'essai est considéré proportionnelle à Voc de l'unité de PV utilisée dans le choix du MPP. Si la supposition est incorrecte, la puissance maximale ne sera pas calculée. Et, en conclusion, cette technique est peu convenable pour des applications avec surfaces de limitation extérieure. 2.6.2.2- CONTROLE DIRECT: THE “TRUE TRACKING”
Les techniques directes incluent ces techniques qui emploient la tension PV et/ou les mesures des courants. À partir de ceux-ci et en tenant compte des variations du point de fonctionnement de générateur PV, le point optimum de fonctionnement est obtenu. Ces algorithmes ont l'avantage d'être indépendants d'une connaissance antérieure des caractéristiques de générateur PV. Ainsi, le point de fonctionnement est indépendant de l'isolement, de la température ou des niveaux de dégradation. Les problèmes sont des erreurs indésirables qui affectent fortement l'exactitude de suiveur. Les techniques appartenant à ce groupe incluent la différentiation, la rétroaction (courant), P&o, I.C, auto-oscillations aussi bien que la logique floue, entre d'autres. D'autres types de classifications qui distinguent l'échantillon et les techniques de modulation peuvent être inclus avec ce groupe. 2.6.2.2.1-TECHNIQUES D'ÉCHANTILLONNAGE
Dans ces procédures, un échantillon est fait de la tension et du courant de générateur PV. Après, en utilisant des stratégies diverses, dans chaque prélèvement de la puissance PV, la puissance, Ppv (t) est recueillie. Un tel prélèvement a un objectif pour la détermination de l'évolution relative de temps de la variable mentionnée ci-dessus. Ainsi, premièrement, le Ppv (t) est calculé. À l'étape deux, la puissance PV Ppv(t+Δt) est calculée encore. Après avoir recueilli l'information passée et présente sur le Ppv, le contrôleur prend une décision sur la localisation du point de fonctionnement. Ce processus de suivi se répète indéfiniment jusqu'à ce que la puissance maximale soit atteinte. À ce principe, les techniques suivantes peuvent être conformes distinguées.

Générateur photovoltaïque
41
2.6.2.2.1.1 TECHNIQUE DE CONTRE REACTION DE TENSION (CURRENT)
S’il n'y a aucune batterie dans le système, afin d'attacher la tension d'autobus à un niveau presque constant, une commande simple peut être appliquée [9]. Ainsi, le feedback de la tension PV (courant) et la comparaison avec une tension constante (courant) peuvent être employés pour ajuster sans interruption du rapport cyclique (d) d'un convertisseur de DC/DC, pour actionner le panneau PV à un point prédéfini de fonctionnement, près de MPP, figure17.
Z
PWMK-
+
Vref
Vpv
Vpv-
+ DC/DCCONVERTER
PHOTOVOLTAICGENERATOR
Figure 17: Tension-feedback avec la modulation PWM
Les inconvénients de cette configuration sont les mêmes que pour la méthode de connection directe (générateur PV + charge de profil). C'est-à-dire, le système ne peut pas s'adapter aux conditions variables d'environnement, telles que l'irradiance et la température. Cependant, si les batteries sont présentes dans le système, une technique commune doit rivaliser avec une tension constante de référence où on le suppose qu'il correspond au VMPP, dans des conditions d'environnement spécifiques. La différentiation résultante de signal (signal d'erreur) est employée pour commander le convertisseur de DC/DC. Bien que l'exécution de cette variante ne soit pas relativement simple, aussi bien elle n'accomplit pas l'objectif proposé parce qu'elle ne tient pas compte des effets des variations d'irradiation et de température.
Les avantages de cette technique sont identiques aux techniques précédentes: c'est une technique simple et économique et emploie seulement une commande de boucle de feedback. Néanmoins, comme a été mentionné avant, elle présente les inconvénients suivants: elle ne peut pas être appliquée d'une mode généralisée dans les systèmes qui ne considèrent pas l'effet des variations de l'irradiation et de la température des panneaux de PV. Elle ne peut pas être appliquée au système avec des batteries.

Générateur photovoltaïque
42
2.6.2.2.1.2- TECHNIQUE DE PERTURBATION ET D’OBSERVATION (“P&O”)
La technique "P&O" est la plus généralement employée dans la pratique par la majorité d'auteurs [10,11]. C'est une technique itérative pour obtenir MPP. Elle mesure les caractéristiques de rangée Ppv et puis perturbe le point de fonctionnement du générateur PV pour rencontrer la direction de changement. Le point maximum est atteint quand dPpv/dVpv=0. Il y a beaucoup de variétés, du simple au complexe. Un exemple d’organigramme d'algorithme de la forme la plus fondamentale est montré sur la figure18.
Figure18: Organigramme conventionnel d'algorithme de perturbation et d'observation, X est
l'étape de la perturbation.
Faisant ceci, la tension de fonctionnement du générateur PV est perturbée par un petit
incrément ΔVpv et le changement résultant ΔPpv de la puissance est mesuré. Si ΔPpv est positif, la perturbation de la tension de fonctionnement devrait être dans la même direction de l'incrément. Cependant, s’il est négatif, le point de fonctionnement du système obtenu s’éloigne de MPPT et la tension de fonctionnement devrait être dans la direction opposée de l'incrément. La logique de cet algorithme est expliquée dans le tableau 1 et 1a figure18, la figure19 montre l'exécution possible.
Vref(t3)=Vref(t2)-X
Beginning
Mesure:Vpv(t1),Ipv(t1) Vref(t1)=Vpv(t1)
Ppv(t1)=Vpv(t1).Ipv(t1)
Mesure:Vpv(t2),Ipv(t2) Vref(t2)=Vpv(t2)
Ppv(t2)=Vpv(t2).Ipv(t2)
ΔPpv(t2)=Ppv(t2)-Ppv(t1)
ΔPpv(t2)>0 YesNo
Vref(t3)=Vref(t2)+X

Générateur photovoltaïque
43
ΔPpv(t2) ΔVpv(t3)
>0 +
<0 -
Table.1 table vraie associée à la perturbation de la technique de perturbation et d'observation
PHOTOVOLTAICGENERATOR
DC/DCCONVERTER
Z
+
-
PWM CONTROL
D/A
DSP CONTROLLATOR
A/D
LOAD
+
-Vpv
Ipv
Figure.19: Exemple de système d’implantation de perturbation et d'observation
Selon table.2, si la puissance PV a augmenté, le point de fonctionnement devrait être aussi bien augmenté. Cependant, si la puissance PV a diminué, la tension devrait être identique. Néanmoins, un inconvénient de cette technique, décrit dans [12], apparaît dans le cas d'une augmentation brusque de l'irradiance, figure11, où l'algorithme réagit comme si l'augmentation s'est produite en raison de la perturbation précédente et de la tension de fonctionnement. L'avantage de cette technique peut être récapitulé comme suit:
Une connaissance des caractéristiques de générateur PV précédente n'est pas exigée; c’est une technique relativement simple néanmoins, sous leur forme plus simple, à un état d'équilibre, le point de fonctionnement oscille autour du MPP, provoquant le gaspillage d'une certaine quantité d'énergie disponible. En outre, c'est une technique peu convenable avec changement rapide des conditions atmosphériques. Cependant, leur réaction peut être améliorée en augmentant la vitesse de l'exécution de l'algorithme de commande ou en présentant une optimisation [13] et [14].
2.6.2.2.1.3-TECHNIQUE PAR INCREMENTATION DE CONDUCTANCE ("I. C ")
Hussein [12] a proposé une alternative technique à " P&O ", développant la technique de "I.C " Il est basé sur l'équation (29). C'est-à-dire, différenciant la puissance PV par rapport à la tension et plaçant le résultat à zéro, le schéma 20 montre la trajectoire de la technique.

Générateur photovoltaïque
44
0=+=+=dVdIVI
dVdIV
dVdVI
dVdP (29)
dVdI
VI=− (30)
Figure 20: Trajectoire par Incrémentation de Conductance
Le côté de main gauche de l'équation (30) représente l'opposé de la conductance instantanée, G=Ipv/Vpv alors que le côté droit de l'équation (30) représente sa conductance par incrémentation. D'autre part, la variation par incrémentation dVpv et dIpv peut être rapprochée par les incréments des deux paramètres, ΔVpv, et ΔIpv dans le but de mesurer la valeur réelle Vpv et Ipv avec les valeurs mesurées en instant précédent, les expressions (31) et (32), respectivement. dVPV(t2)≈ΔVPV(t2)=VPV(t2)-VPV(t1), (31) dIPV(t2)≈ΔIPV(t2)=IPV(t2)-IPV(t1). (32) Par conséquent, l'analyse du dérivé peut examiner si le générateur PV fonctionne à son MPP ou loin de ça, voir les équations (33), (34) et (35). En outre, la figure 21 montre, comme exemple, l'organigramme mis en application dedans [12].
0>pv
pv
dVdP
pour MPPpv VV < (33)
0=dVdP
0pdVdP 0pdVdP
V
P

Générateur photovoltaïque
45
0=pv
pv
dVdP
pour MPPpv VV = (34)
0<pv
pv
dVdP
pour MPPpv VV > (35)
Figure 21 : Organigramme de conductance par incrémentation L'avantage principal de cet algorithme est qu'il offre une bonne technique de
rendement sous changement rapide des conditions atmosphériques. En outre, il réalise l'oscillation inférieure autour du MPP que la technique de P&O, quoique, quand la technique
Beginning
Measure: Vpv(t1),Ipv(t1)
Measure: Vpv(t2),Ipv(t2)
dVpv=Vpv(t2)-Vpv(t1) dIpv(t2)=Ipv(t2)-Ipv(t1)
dVpv=0
dIpv=0
dIpv/dVpv> -Ipv/Vpv
dIpv/dVpv= -Ipv/Vpv
dIpv/dVpv> -Ipv/Vpv
Vref(t3)= Vref(t2)-X
Vref(t3)= Vref(t2)-X
Vref(t3)= Vref(t2)+X
Vref(t3)= Vref(t2)+X
YesYes
YesYes
No No
No No
No
Yes

Générateur photovoltaïque
46
de P&O est optimisée, les rendements de MPPT de la conductance par incrémentation et de l'algorithme P&O de MPPT soient, essentiellement, identiques [13] et [15]. Néanmoins, il a des inconvénients qu'il exige, le circuit de commande complexe qui pourrait avoir eus comme conséquence un système des coûts élevés, il y a 10 ans. Cependant, aujourd'hui il y a beaucoup d'options pour le faire avec un meilleur marché. 2.6.2.2-TECHNIQUES PAR MODULATION
Dans les techniques discutées plus tôt, les techniques d'échantillonnage, l'ajustement approprié pour le point maximum de tension mène un point près de l'oscillation autour du point maximum. Ces oscillations sont produites automatiquement par la commande de feedback utilisée. Cependant, il y a beaucoup d'autres techniques qui ajoutent une oscillation. Ces algorithmes sont connus en tant que technique d'oscillation forcée. Plusieurs articles ont traité ce sujet [16]. Par exemple; la référence [16] présente une petite tension, 100Hz qui est ajouté à la tension de la tension d'opération du générateur PV.Ceci mène à l'ondulation d’une puissance, dont la phase et l'amplitude dépendent de l'endroit relatif du point d'opération au MPPT, figure22. Si cette modulation se produit dans la zone " A ", le côté gauche sur le MPP la tension d'ondulation de la puissance aura lieu parfaitement dans la phase. Cependant, si la modulation se produit dedans nommé de l'opération de la zone " B ", au bon côté du MPP, le bordage de la puissance au cas où ce l'opération serait exactement le MPP, le bordage du rendement de puissance aura deux fois la fréquence du bordage de la tension, avec une amplitude très petite.
L'avantage de cette technique est que l'analyse de l'amplitude et de la phase fournit des informations sur l'endroit du MPP. En outre, le signal de sortie converge lentement vers zéro quand le point d'opération s’approche du MPP. Ceci permet à la tension de fonctionnement d'être ajustée lentement sur la tension de MPP. Avec lui, il n'y aura aucune oscillation continue autour du MPP provoqué par une largeur fixe de passage du convertisseur MPPT. La seule oscillation qui se produit avec cette technique de modulation de l'opération de tension est 100Hz. Néanmoins, il a comme inconvénient la grande complexité de son exécution aussi bien que l'évaluation des signaux très haute amplitude.

Générateur photovoltaïque
47
Figure 22: La courbe P-V pour un générateur PV avec l'ondulation de puissance provoquée par le
point photovoltaïque " A " de modulation de tension dénote le domaine de l'opération, du côté gauche
du MPP et le point " B " le secteur du côté droit du MPP.
A B
Power ripple (W)
Output voltage (V)
Voltage ripple (V)
Output power (W)
0 20 40 60 80 100 120
300 250 200 150 100 50

Générateur photovoltaïque
48
2.7-CONCLUSION Dans ce chapitre, le comportement électrique du module, générateur et cellule solaire
photovoltaïque, est présenté. Les simulations des caractéristiques principales du générateur photovoltaïque, à savoir I-V et P-V, ont montrées l'influence de l’ensoleillement et de la température de façon différente.
En ce chapitre également, les algorithmes MPPT ont été couverts en détail. Comme ont été faits connaître, il y a beaucoup de manières de distinguer et de grouper les techniques pour suivre le MPP au générateur PV. Cependant, en ce chapitre, les techniques directes et indirectes étaient choisies et développées en détail. Les techniques indirectes ‘ quasi-trackers’ ont le dispositif particulier de l'obtention, mais plutôt l’estimation de la puissance maximale soit l’ensoleillement, soit la température. Ils doivent mesurer une partie de la tension, du courant du générateur PV, l'ensoleillement ou employer des données empiriques par des expressions mathématiques d'approximation numérique pour estimer le MPP du générateur spécifique de PV installé dans le système. Bien que, dans beaucoup de cas, ils puissent être simples et peu coûteux, ils ne sont pas totalement souples. En ce qui concerne le profil de charge; aucun d'eux ne peut obtenir le MPP exactement à partir du PV en aucune condition atmosphérique. Plus tard, il est connu en tant que " quasi-suiveur ". D'autre part, la technique directe peut être également distinguée, " technique de vrai-suiveur" qui offre les avantages suivants: ni une grande base de données, ni une grande mémoire n'est nécessaire pour calculer le MPP; elle est totalement souple en ce qui concerne le profil de charge; le suiveur de MPP est indépendant de la variation des paramètres du générateur PV. De même, le circuit de commande ne doit pas être adapté pour un générateur spécifique ou il doit mettre à jour quand on change leurs paramètres et il n'est pas nécessaire de savoir le niveau d'incident de l’ensoleillement. Néanmoins, dans toutes les techniques, jusqu'ici, la mesure de la tension et du courant du générateur PV sont nécessaires.

Générateur photovoltaïque
49
2.8 REFERENCES [1] Duzat, R. Analytic and Experimental Investigation of a Photovoltaic Pumping System PhD thesis. 2000 Oldenburg University. [2] Weidog .Xiao, A novel modelling method for photovoltaic cells, 35th annual IEEE Power Electronics Specialists conference, Aachen, Germany 2004, pp 1950-1956 [3] Weiner.D An optimal design of a photovoltaic D.C motor coupled water pumping system. IEEE, conference, 1990, pp 268-274. [4] Advantage of boost VS. Back topology for maximum power point tracker in photovoltaic systems IEEE , pp 355-358. [5] Ibrahim. H.E- S, A Microcomputer controlled buck regulator for maximum power point tracker for DC pumping system operates from photovoltaic systems, Fuzzy system conference , FUZZ-IEEE’99, pp.406-411. [6] Museums. M.A.S, Construction and testing of a voltage-based maximum power point tracker (VMPPT) for small satellite power supply, in: 13th Annual AIAA/USU Conference, Small Satellite, 1999. [7] Schoeman. J.J, A simplified maximal power controller for terrestrial photovoltaic panel arrays, IEEE Power Electronics Specialists Conference. PESC ‘82 Record. New York, NY, 1982, pp. 361–367. [8] Abou El Ela. M, Optimization of the function of a photovoltaic array using a feedback control system. Solar. Cells: Their Science, Technology, Applications and Economics 13 (1984) (2), pp. 185–195. [9] Hua .Ch. Comparative study of peak power tracking techniques for solar storage system, in: IEEE Applied Power Electronics Conference and Exposition (APEC’98), vol. 2, 1998, pp. 679–685. [10] Kim .Y, A new peak power tracker for cost-effective photovoltaic power systems, IEEE Proc. Energy Conversion Eng. Conf. IECEC 96 3 (1996) (1), pp. 1673–1678. [11] Hua .Ch. Implementation of a DSP-controlled PV system with peak power tracking, IEEE Trans. Ind. Electron. 45 (1998) (1), pp. 99–107. [12] Hussein .K.H., Maximum photovoltaic power tracking: an algorithm for rapidly changing atmospheric conditions, IEE Proc.Generation Transmission Distrib. 142 (1995) (1), pp.59–64. [13] Liu. X, An improved perturbation and observation maximum power point tracking algorithm for PV arrays, in: Power Electronics Specialists Conference, 2004, PESC 04. 2004, IEEE 35th Annual vol. 3, 2004, pp 2005–2010. [14] Femia .N, Optimization of perturb and observe maximum power point tracking method, IEEE Trans. Power Electron. Vol.20 N°4 2005, pp. 963–973.

Générateur photovoltaïque
50
[15] Hohm .D.P Comparative study of maximum power point tracking algorithms, Prog. Photovolt: Res. Appl. 11 (2003), pp. 47–62 [16] Tse .K.K A novel maximum power point tracking technique for PV panels, in: IEEE Power Electronics Specialists Conference, 2001, PESC. 2001 IEEE, vol. 4, 1970–1975. [17]Z. Salameh, F. Dagher and W. Lynch, Step-down maximum power point tracker for photovoltaic systems, Solar Energy Vol 46. N° 5, 1991, pp. 279–282.

Modélisation et simulation de l’ensemble : g.ph, onduleur, moteur et pompe
51
Chapitre 3
MODELISATION ET SIMULATION DE L’ENSEMBLE: G.Ph, ONDULEUR, MOTEUR ET POMPE
3.1-INTRODUCTION
La philosophie de la simulation digitale c’est que les expériences, qui, normalement devraient être réalisées sur des systèmes réels sous des conditions: prix de revient élevé et une durée consommée longue, peuvent être faits numériquement sur des machines en un temps très court, réduisant ainsi le temps et les investissements. La simulation digitale sert afin de comprendre le comportement opérationnel de ces composants et les interactions entre eux. Depuis la simulation de la performance d’un système, on peut tracer toutes les étapes de la conversion d’énergie et identifier en détail les pertes à travers le système. Comme la simulation sur ordinateur permet la variation d’une gamme de paramètres d’un système l’investigation comme fonction de ces paramètres, de caractéristiques opérationnelles, du procédé du projet de tel système. Une autre utilisation de la simulation assistée par ordinateur est la stratégie de l’évaluation des opérations pour le contrôle de système. 3.2-SCHEMA SYNOPTIQUE
La figure1 montre l’ensemble composé d’un générateur photovoltaïque, traqueur de point de puissance maximal, onduleur, moteur asynchrone et pompe.
~
PV GNERATOR MPPT INVERTER
IM
PUMP
Figure1: Schéma synoptique de l’ensemble 3.3-MODELISATION DU GÉNÉRATEUR Ph
Un générateur photovoltaïque se compose d'un certain nombre de modules formés par un certain nombre de cellules photovoltaïques, connectés ensemble en série et en parallèle

Modélisation et simulation de l’ensemble : g.ph, onduleur, moteur et pompe
52
ψ εq
idiq
ic
d b
c
a
ia
εa
ε
εd εc
εb
2π/3
pour fournir le courant et la tension nécessaires. La performance du générateur dépend de la variabilité des modules que comprend le générateur et les cellules comprises par les modules. La tension de sortie du générateur photovoltaïque dépend du nombre de modules en série, alors que le courant de sortie dépend du nombre de modules en parallèle.
La modélisation du générateur photovoltaïque est déjà étudiée dans le sous paragraphe 2.2.1 du chapitre 2.
3.4-MODELISATION DE L’ONDULEUR
L’onduleur génère un système de tension triphasé, variable en amplitude et en fréquence qui fonctionne avec des charges variables. Le courant est modulé sinusoïdalement afin d’obtenir un grand rendement La tension de phase peut être exprimée comme suit [1]:
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−−−−−
=⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
3
2
1
211121112
3CCC
CV
VVV
pv
cn
bn
an
Avec pvCV est la tension d’entré, 1C , 2C et 3C sont les signaux de contrôle MLI.
3.5-MODELISATION DU MOTEUR AYNCHRONE
Le moteur asynchrone est présenté par le modèle ramené à un système d’axes (d,q) obtenu par la transformation de Park d’un système à trois phases en un système de deux phases[2] comme est montré sur la figure 2. Figure: 2 Système à trois phases (Oabc) et système biphasique (Odq)
Dans le but d’une simplification, on pose [P] = [P(ψ)].
[P(ψ)]: est connue sous le nom de matrice de Park donnée par la relation suivante:

Modélisation et simulation de l’ensemble : g.ph, onduleur, moteur et pompe
53
Par application de la transformation linéaire [P (ψ)], nous obtenons:
[P]-1[Vdqo]=[R]. [P]-1.[idqo]+ (d/dt).[P]-1.[φdqo] (2) Après simplification, l’équation (2) devient:
[Vdqo]=[R][idqo]+(d/dt)[φdqo]+[P].(d[P]-1/dt.[φdqo] (3) Où:
[ ] [ ] [ ] )/.(000001010
)./..( 1 dtddtPdP dqo Ψ⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡ −=− φ (4)
Ainsi les équations de Park qui constituent un modèle dynamique pour les bobines biphasé sont données par:
qddd dtddtdirV φφ )./(/. Ψ−+= (5)
dqqq ).dt/d(dt/di.rV φΨφ ++= (6)
dtdirV ooo /. φ+= (7)
On suppose que l’axe d est interdépendant de l’axe aOr
, d’où: Ψ = 0, ainsi les équations (5), (6) et (7) deviennent:
dtdirV ddd /. φ+= (8)
dtdirV qqq /. φ+= (9)
dtdirV ooo /. φ+= (10)
V0 composant est supprimé quand le système est équilibré, c.-à-d. la somme des composants (a, b, c) est nulle. Après l'établissement des relations entre le flux, les courants des axes (d,q) et les axes (a, b, c) [4], nous avons:
⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
rq
rd
sq
sd
rq
rd
sq
sd
iiii
LrMLrM
MLsMLs
.
0000
0000
φφφφ
(11)
Où: LS, Lr et M sont respectivement inductance de stator, inductance du rotor et l'inductance mutuelle entre le stator et le rotor. Les équations de tension du moteur asynchrone dans le système des axes (d,q) sont données comme suit:
dtdiRsV sdsdsd /. φ+= (12)
dtdiRsV sqsqsq /. φ+= (13)

Modélisation et simulation de l’ensemble : g.ph, onduleur, moteur et pompe
54
0)./()/(. =−+= rqrrdrdrd dtddtdiRrV φθφ (14)
0).dt/d()dt/d(i.RrV rdrrqrqrq =++= φθφ (15)
θr: L'angle électrique du rotor relativement avec l'axe d.
Dans ce modèle θr est nul (θr = 0), c.-à-d. le cas de l'étude des tailles du stator. Après avoir développé le flux comme fonction des courants, le modèle final de la machine asynchrone est représenté par les équations suivantes:
)/.()/.(. dtdiMdtdiLsiRsV rdsdsdsd ++= (16)
)/.()/.(. dtdiMdtdiLsiRsV rqsqsqsq ++= (17)
)i..Mi..Lr()dt/di.(M)dt/di.(Lri.RrV0 sqrrqrsdrdrdrd ωω ++−+== (18)
sdrrdrsqrqrqrq iMiLrdtdiMdtdiLriRrV ....()/.()/.(.0 ωω ++−+== ) (19)
Le couple électromagnétique est donné par:
Ω= .eCPm (20)
Où:
eC : est le couple électromagnétique.
pr /ω=Ω (Ω: vitesse angulaire de rotation).
ωr: vitesse angulaire du rotor. P: nombre de pairs de pôles. L'expression scalaire du couple électromagnétique est donné par:
[ ]sdrqrdsqe iiiipMC ... −= (21)
3.6-MODELISATION DE LA POMPE CENTRIFUGE
Les principes des pompes centrifuges sont la technologie la plus utilisée dans les systèmes de pompage photovoltaïques. Les pompes centrifuges sont conçues pour une tête fixe et leur rendement en eau augmente avec la vitesse de rotation. Les pompes centrifuges sont simples, à prix réduit et sont disponibles pour une large gamme de débit [3]. Dans la présente étude, le principe de base d'opération de la pompe centrifuge et le modèle mathématique sont développés pour décrire son comportement opérationnel. 3.6.1 PRINCIPE DE FONCTIONNEMENT ET CONSTRUCTION
Les pompes centrifuges utilisent un ensemble de palettes de roue à aubes tournant dans une enveloppe de volute formée pour donner l'énergie aux liquides. Les principales pièces de la pompe centrifuge sous sa forme plus simple, sont montrées sur la figure 3.

Modélisation et simulation de l’ensemble : g.ph, onduleur, moteur et pompe
55
Le liquide est forcé par une forme atmosphérique ou autre forme de pression dans le centre de la roue à aubes où il est accéléré par la rotation des palettes de roue à aubes autour et à l'extérieur par la force centrifuge dans la volute d'extension. L'expansion convertit l'énergie du fluide en mouvement en énergie de pression à la décharge. Comme la masse du fluide elle-même crée la pression dans la pompe par la force centrifuge, la pression est proportionnelle à la densité du fluide (masse par unité de volume). L’expression de la force centrifuge est:
rMvF 2= (22)
Où: F: force sur l’élément fluide à la périphérie de la roue à aubes. M: mass d l’élément du fluide. v: vitesse périphérique de la roue à aubes. r: rayon de la roue à aubes. En outre, est proportionnelle à la densité du fluide la pression exercé par un poids de ce fluide sur une colonne verticale. Par conséquent, la longueur d'une colonne statique du fluide fonctionnel équivalent à la pression produite par les formes de pompe par mesure commode des capacités de pompe centrifuge au travail contre une pression différentielle.
Figure 3: Coupe de la construction de base d'une pompe centrifuge.
discharge
rotation
Cut water
Volute
Half--section
A Back shroud
Drive shaft Impelier
Eye
Flow
Seat
Front shroud
Vanes

Modélisation et simulation de l’ensemble : g.ph, onduleur, moteur et pompe
56
3.6.2-CARACTÉRISTIQUES DE LA POMPE CENTRIFUGE
3.6.2.1- CARACTÉRISTIQUES H(Q)
Les pompes sont généralement décrites par leurs caractéristiques H (Q). H (en mètre), est la charge hydraulique appliquée sur le fluide par la roue à aubes et Q (m3/s) est le débit de la pompe. La dépendance d'une tête de roue à aubes à l’égard du débit et la révolution a été exprimée par la formule analytique de " Pleiderer et de Peterman " [4] notamment:
22 cQQbaH −+= ωω (23)
Les constante a, b et c sont déterminées selon les données de la mesure du fabricant.
Figure 4: la caractéristique H(Q) de la pompe [7]
3.6.2.2- PUISSANCE HYDRAULIQUE Une pompe est une machine qui convertie la puissance mécanique d'entrée en puissance de fluide de sortie. Elle est couplée directement au moteur et est caractérisé par couple, vitesse et le débit. Une bonne adaptation entre la pompe et le moteur mène à de bons résultats. Une formule générale de la puissance hydraulique en Watt, est donnée par:
gQHPH ρ= (24)
Une autre valeur d'expression à considérer, la puissance en Watt consommée par la pompe c.-à-d. la puissance mécanique nécessaire de conduire la pompe qui est donnée par:
pHQP η/.81.9= (25)
pη : Rendement de la pompe
ρ : Masse volumique (1000Kg/m3)

Modélisation et simulation de l’ensemble : g.ph, onduleur, moteur et pompe
57
3.6.2.3-CARACTERISTIQUES DU COUPLE
Le couple de la pompe centrifuge est donné par [5]:
02 TCT +Ω= (26)
Où: C : le facteur de proportionnalité [Nm/rads-1] T0 : le couple statique Ω : la vitesse de rotation 3.6.2.4-RENDEMENT DE LA POMPE
Le rendement hydraulique d’une pompe est donné par:
shqft
hydraulicH P
P=η (27)
3.7-MODELE SIMULINK ET SIMULATION DE L’ENSEMBLE: G.Ph, ONDULEUR,
MOTEUR ET POMPE
3.7.1-LE MODELE SUMILINK DU G.Ph Sur la base du modèle mathématique du générateur photovoltaïque développé dans le sous paragraphe 2.2.1 du chapitre2, le bloc schématique de Simulink est montré sur la figure 4 pour une insolation et une température données. Le même bloc schématique de simulink peut être employé pour plusieurs insolations et températures.
alphadel I
del V Ns
Np
2
Inew
1
Vnew
25
Tref
Vref
Iref
Subsystem
0.7
RsProduct3
Product2
Product1Product
11/2
Ns/Np
2.41
Isc
1000
Gref
4
35
-K-
-K-
Beta
1
1
2
G
1
T
Figure 4: Schéma bloc simulink du générateur photovoltaïque 3.7.1.1-SIMULATION
Les résultats de simulation du bloc simulink sont montrés sur les schémas 5 et 6. Le schéma 5 représente les caractéristiques I-V du générateur de photovoltaïque pour l'insolation

Modélisation et simulation de l’ensemble : g.ph, onduleur, moteur et pompe
58
1000W/m2 et de température 25°C. Le schéma 6 illustre les caractéristiques de P-V du générateur photovoltaïque.
0 100 200 300 400 500 600 700 8000
1
2
3
4
5
6
voltage(V)
curre
nt (A
)
Figure 5: Caractéristiques I-V du générateur photovoltaïque
0 100 200 300 400 500 600 700 8000
500
1000
1500
2000
2500
3000
voltage(V)
pow
er (W
att)
Figure 6: Caractéristiques P-V du générateur photovoltaïque 3.7.2 LE MODÈLE SUMILINK DU G.Ph ET MPPT La figure 7 illustre le bloc schématique de simulink du générateur photovoltaïque et avec le cheminement maximum de point de puissance. L’utilisation de la fonction Matlab max() permet la détermination du point maximum de la puissance pour chaque insolation.

Modélisation et simulation de l’ensemble : g.ph, onduleur, moteur et pompe
59
25
T
SubSystem
Scope3
Scope1
T
G
Vnew
Inew
PVG
v g
ig
v max
imax
MPPT
1000
G
Figure 7: Générateur photovoltaïque avec MPPT 3.7.2.1-SIMULATION
Les résultats de la simulation du générateur photovoltaïque avec MPPT sont montrés sur les figures 5 et 6. Les signes croix sur les figures marquent le point de puissance maximum. 2.7.3- LE MODÈLE SUMILINK DE L’ONDULEUR, G.Ph ET MPPT L’ensemble est composé d’un générateur photovoltaïque, point de la puissance maximale et un inverseur, le tout est présenté sur la figure 8.

Modélisation et simulation de l’ensemble : g.ph, onduleur, moteur et pompe
60
25
T
SubSystem
Scope4
Scope3
Scope1
T
G
Vnew
Inew
PVG
In1
In2
Out1
Out2
Out3
Onduleur
v g
ig
v max
imax
MPPT
1000
G
Figure 9: PVG-MPPT and Inverter schematic block
3.7.3.1-SIMULATION La tension de sortie de l’onduleur obtenue après la simulation du schéma bloc simulink de la figure 8 est montrée sur la figure 9. On peut voir de la figure que la longueur d’onde PWM est obtenue avec ce modèle. Figure 1 montre la tension de sortie de l’onduleur après filtrage.
0 0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018 0.02-600
-400
-200
0
200
400
600
Time(s)
Vol
tage
(V)
Figure 9 Tension de sortie de l’onduleur

Modélisation et simulation de l’ensemble : g.ph, onduleur, moteur et pompe
61
0 1000 2000 3000 4000 5000 6000-400
-300
-200
-100
0
100
200
300
400
Time(s)
Vol
tage
(V)
Figure: 10 Tension de sortie de l’onduleur filtré 3.7.4- LE MODELE SIMULINK DU MOTEUR - POMPE
Le modèle simulink du moteur - pompe est présenté sur la figure 11. Ce bloc schématique est construit sur la base du modèle mathématique du moteur asynchrone et pompe développée dans ce chapitre.
N
p
H[m]
Q [m3/s]
Tres
solar pump
Tem
WrP
Tem
Torque EM
t
Time
Wr
Speed Wr
N
Speed NUa
Ub
Uc
Inverter outputs
H
High
Q
Flowrate
Clock
Ua
Ub
Uc
Tres
N [rps]
Wr [rad/s]
Torque [N.m]
Induction motor
Figure 11 Le modèle simulink du moteur-pompe

Modélisation et simulation de l’ensemble : g.ph, onduleur, moteur et pompe
62
3.7.4.1-SIMULATION
Les résultats de la simulation du modèle simulink montrés sur la figure 11, sont illustrés sur les figures 12 et 13.
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.1-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5
Time(s)
Sta
tor C
urre
nt(A
)
Figure 12: Courant du stator
0 1 2 3 4 5 6 7-4
-2
0
2
4
6
8
10
12
Time (Sec)
Torq
ue(N
.m)
Figure13 Couple du moteur

Modélisation et simulation de l’ensemble : g.ph, onduleur, moteur et pompe
63
3.7.5-LE MODELE SIMULINK DE L’ENSEMBLE (G.Ph, ONDULEUR, MOTEUR ET
POMPE)
Le modèle simulink[8] présenté dans la figure 14 représente le groupement du modèle simulink du générateur photovoltaïque, un inverseur, moteur et pompe à induction.
Tem
WrP t
Time
25
T
SubSystem
N
Speed (rpm)
Wr
Speed (r/s)
N
p
H[m]
Q [m3/s]
Tres
Solar pump
T
G
Vnew
Inew
PVG
v g
ig
v max
imax
MPPT
In1
In2
Out1
Out2
Out3
Inv erter
Ua
Ub
Uc
Tres
N [tour/S]
Wr [rad/s]
Torque [N.m]
Induction Motor
H
Hight
1000
G
Q
Flowrate
Clock
Tem
Em Torque
Figure 14: Groupement des modèles simulink 3.7.5.1-SIMULATION
La figure 15 montre la vitesse du moteur et la valeur du débit de la pompe, on voit qu le débit de la pompe st proportionnel à la vitesse du moteur.
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5-500
0
500
1000
1500
2000
2500
3000
Time(s)
Spe
ed(rp
m)
Motor Speed
Pump flow(m3/h)x1000
Figure 15: Vitesse du moteur et débit de la pompe

Modélisation et simulation de l’ensemble : g.ph, onduleur, moteur et pompe
64
3.8-CONCLUSION
Dans ce chapitre, la modélisation de l’ensemble composé de : générateur photovoltaïque, inverseur, moteur à induction et pompe est présenté. Les modèles simulink sont construit sur la base des modèles mathématiques. Les résultats de la simulation, voir les différentes figures illustrent la performance d’un model simulink individuel. La simulation a été effectuée dans l'ordre que nous déduire des idées évidentes sur le
fonctionnement du générateur photovoltaïque, l’onduleur, le moteur asynchrone et la pompe.
En outre, les courbes obtenues sur les figures 9, 12 et 15 du chapitre 5 sont semblables aux
résultats obtenus en référence [6].
3.9-REFERENCES [1] G.Seguier, ‘les convertisseurs de l’électronique de puissance, la conversion continu alternatif, T4, Technique et documentation, France, 1987. [2 ] J.P.Caron, J.P. Hautier : Modélisation et commande de la machine asynchrone 2eme Edition 1995 [3]A.A. Ghoniem “design optimization of photovoltaic powered photovoltaic pumping system”. Energy Conversion and Management. 47(2006). pp1449-1463 [4] D.Weiner and A.Levinson. ‘An optimal operation design of a photovoltaic dc motor coupled water pumping system. Electric machine and power system, Vol.24 N°24(1996) pp 277-288. [5] C.Hamouda , B. Azoui , R, Hanitch and H.Seikman ‘ Experimental and theoretical investigation for solar pump and other solar system in a Algeria’ photovoltaic solar energy conference Freimburg, PP.1069-1072,1989. [6] M.Jraidi, “Modelling, simulation and optimization of PV pumping systems installed in Tunisia. 19th European photovoltaic solar energy conference, 7-11 June 2004, Paris, France [7] A. Batka, ‘Perspective for the sake of photovoltaic pumping development in the south’ Doctorat d’Etat , University of Batna 2004. [8] Matlab/ Simulink toolbox manual.

Optimisation du fonctionnement du générateur photovoltaïque Conditions du générateur photovoltaïque
65
Chapitre 4
OPTIMISATION DU FONCTIONNEMENT DU GENERATEUR PHOTOVOLTAIQUE
4.1-INTRODUCTION
La génération d’énergie photovoltaïque (Ph) prend l'importance accrue comme source renouvelable due aux avantages tels que l'absence du coût du carburant, minimum d'entretien et l'absence des pièces mobiles. Cependant deux facteurs importants limitent l'implantation des systèmes photovoltaïques, c.-à-d. le coût et le faible rendement de conversion d'énergie. En raison du coût élevé des cellules solaires, il est nécessaire de faire fonctionner le générateur photovoltaïque au point de puissance maximum (MPP).
Etant donné que le générateur photovoltaïque est une source d'énergie non linéaire, la puissance de sortie dépend de la tension de charge et des conditions atmosphériques, qui sont imprévisibles. Afin d'optimiser le rapport entre la puissance de sortie et le coût d'installation, les systèmes photovoltaïques sont censés d’utiliser le maximum de puissance du générateur photovoltaïque et d’une manière continue, indépendamment des conditions atmosphériques ou de la tension de charge. Les suiveurs de point de puissance maximale des systèmes font fonctionner le générateur photovoltaïque de sorte que la puissance maximum puisse être obtenue.
La recherche du point de puissance maximum est le travail essentiel dans l'optimisation des systèmes photovoltaïques car il y a un problème d’adaptation entre les caractéristiques de charge et le point de puissance maximum du générateur photovoltaïque. L'optimisation traite les paramètres électriques de fonctionnement du générateur solaire.
Ce chapitre traite la conception et la réalisation expérimentale d'un suiveur de point de puissance maximal en temps réel (MPPT), qui est un convertisseur DC-DC de rendement élevé, fonctionnant en mode conduction continu avec une technique particulière de commande appelée la technique de Hill Climbing (HC).
4.2- CONCEPTION ET REALISATION D’UN SPPM
Suiveur de point de puissance maximum veut dire que le générateur photovoltaïque est toujours supposé de fonctionner à la valeur maximale de tension/courant. Le suiveur de point maximum de puissance (MPPT) est un système électronique qui change le point de fonctionnement électrique du générateur photovoltaïque de sorte qu'il puisse fournir la puissance maximale indépendamment de la charge. La figure 1 montre le système proposé. Le

Optimisation du fonctionnement du générateur photovoltaïque Conditions du générateur photovoltaïque
66
système est directement connecté au générateur photovoltaïque et se compose d'une section de puissance et d'une unité de commande. La section de puissance est généralement un convertisseur DC-DC tandis que l'unité de commande peut être construite par l'électronique logique ou analogue.
current sensor
voltagesensorPV
Array
L
IRF840 C
D
voltagesensor
MOSFETDrivingCircuit
2
3
1 7
Vpv Vout
Ipv Iout
4
EV80C196MCS MICROCONTROLLEREVALUATION BOARD
Isolation andAmplification Circuits
6
Figure1: Schéma synoptique du MPPT
4.2.1-PARTIE PUISSANCE (CONVERTISSEUR DC-DC)
Le convertisseur DC-DC fonctionne comme suiveur de point de puissance maximum
et règle la tension de sortie du générateur photovoltaïque.
Deux types de topologies des convertisseurs DC-DC, convertisseur Buck ou convertisseur boost sont les plus généralement employés par la majorité des concepteurs du suiveur de puissance maximum. Dans le travail actuel, le convertisseur boost est choisi puisqu'il a d'excellentes caractéristiques telles que les possibilités des tensions élevées et de rendement important, la petite taille et le bas prix [1]. Le convertisseur est capable d’extraire le maximum de puissance du générateur
photovoltaïque pour un ensoleillement donné et la température ambiante par l’ajustement du
rapport cyclique du convertisseur. En plus, un circuit passif d’aide à la commutation est
utilisé de sorte que la commutation améliorée du convertisseur puisse être obtenue. Le
convertisseur boost est employé pour vraiment suivre le point maximum de puissance plutôt
que de maximiser la tension. Le circuit de base du convertisseur boost conçu, est

Optimisation du fonctionnement du générateur photovoltaïque Conditions du générateur photovoltaïque
67
expérimentalement mis en application est montré sur la figure2; là où le transistor MOSFET
est utilisé comme élément de commutation en raison de sa facilité de commande, de
rendement élevé et de commutation rapide. Aussi une diode de puissance qui peut supporté
les courant de peak extrême de la bobine est utilisé. La bobine d’entrer est bobine un noyau
de ferrite avec un entrefer pour empêcher la saturation de noyau qui pourrait être provoquée
par une grande valeur composante continu du courant. En plus du circuit de puissance de
convertisseur, deux sondes, sonde de courant et sonde de tension sont placées a l’entré et à la
sorte au convertisseur pour que la puissance instantanée puisse être calculée par le
microcontrôleur a travers la lecture du courant et de la tension.
On a démontré au chapitre 2 que le rapport entre la tension d'entrée et la tension de
sortie du convertisseur boost est donné par:
PVout VVα−
=1
1 (1)
Où Tton=α est défini comme rapport cyclique du convertisseur. Ceci signifie que la
tension de sortie du convertisseur peut être simplement commandée par la variation du
rapport cyclique. Le rapport cyclique est changé sans interruption afin de suivre le point de
puissance maximum du générateur photovoltaïque. La valeur de l’inductance, L, exigé pour
permettre le mode de conduction continu du convertisseur est calculé tels que le courant
maximal d'inducteur à la puissance maximum de sortie n'excède pas l'estimation courante de
commutateur de puissance.
Par conséquent, L est calculé comme: pvS
pv
IfV
LΔ
≥α
(2)
Où KHzTf SS 201 == est la fréquence de commutation,α est le rapport cyclique à la
puissance de sortie maximale du convertisseur, pvV la tension de sortie et pvIΔ est la valeur
d'ondulation du courant crête à crête de la bibine. Le choix de la valeur de la bibine du
convertisseur et de la fréquence de commutation est un compromis entre le rendement du
convertisseur, le coût, possibilités de puissance et le poids dans le travail actuel. La fréquence
de fonctionnement est choisie égale à 20 KHz. La valeur de condensateur de sortie calculée
pour donner la valeur crête à crête des ondulations désirées de la tension du condensateur:
outS
out
VfI
CΔ
≥α
(3)

Optimisation du fonctionnement du générateur photovoltaïque Conditions du générateur photovoltaïque
68
Où SS Tf 1= est la fréquence de commutation, outI est le courant de sortie et outVΔ est la valeur de l’ondulation de tension sortie crête à crête du condensateur. Le schéma électrique et les datasheet des composant sont donné en annexe A.
L
MOSFET
D
CPV
1 2
5
4
VoutVpv
Ipv
Laod
MPPTControl
Figure.2: Convertisseur Boost
4.2.1.1-CIRCUIT D’AIDE A LA COMMUTATION
Afin d'améliorer l'opération de commutation du convertisseur boost, un circuit de d’aide à la commutation est introduite. Le circuit d’aide à la commutation proposé est montré
sur le figure 3, l’inductance sL réduit le maximum dtdi / durant ‘turn on’ et le
condensateur sC limite l’augmentation du rapport de tension dtdv / durant ‘turn off’
MOSFET
Ls
Rs
Rp
Ds
Dp
Cs
45
Vrail
Ground
Ground
6
1
Vrail
Figure .3 Circuit d’aide à la commutation

Optimisation du fonctionnement du générateur photovoltaïque Conditions du générateur photovoltaïque
69
4.2.1.2-LES PERTES DU CONVERTISSEUR Les pertes de convertisseur sont la somme de pertes de divers composants du convertisseur [2]. La première étape du calcul des pertes est de calculer les courants efficaces dans les différent composant du circuit. Les valeurs crête, pour faire une pointe du des ondulation du courant de la bobine, peut être obtenue à partir de la relation (1).
L
Vti pv
onL += (1)
Le courant efficace de la bobine RMSLI , est calculé à partir du courant moyen de la
bobine qui est le courant d’entrer du convertisseur et le courant d'ondulation de la bobine est donné parla relation (2).
⎟⎟⎠
⎞⎜⎜⎝
⎛+=
12
22
,L
pvRMSLi
II (2)
Le courant efficace du transistor RMSTI , est le courant calculé en fonction du rapport cyclique
et est obtenu de la formule (3).
( )α.2,, RMSLRMST II = (3)
Le courant efficace de la diode RMSDI , est également calculé comme fonction du rapport
cyclique et est calculé à partir de la formule (4).
( )( )α−= 1.2,, RMSLRMSD II (4)
Le courant efficace du condensateur de sortie RMSCI , dépend du courant de sortie du
convertisseur et est donné par la relation (5).
( )22,, oRMSDRMSC III −= (5)
Après avoir calculé le courant efficace dans divers composants du circuit de puissance de convertisseur avec l’hypothèse de conduction on mode continu, les pertes dans chaque composant sont calculées comme suit:
• Les pertes de conduction de la bobine LRMSLL RIP .2,= (6)
• Les pertes de conduction de transistor MOSFET DSonRMSTCT RIP .2,, = (7)
Les pertes de commutation de transistor MOSFET STP , dépendent du courant d'entrée,
de la tension de sortie, de la fréquence de commutation, du temps de commutation ‘on’ et

Optimisation du fonctionnement du générateur photovoltaïque Conditions du générateur photovoltaïque
70
‘off’, avec l’hypothèse qu'une croissance linéaire du courant et après la décroissance de la tension pendant la période d’amorçage et vice versa pendant la période du blocage.
( )offswonswopvST ttfVIP ,,, ....5.0 += (8)
Les pertes du circuit de gâchette du transistor MOSFET gTP , sont calculées en notant
que pendant chaque cycle de commutation que la gâchette du transistor MOSFET est
chargée à la tension d’alimentation du circuit de gâchette du transistor MOSFET ggV après
ce déchargé dans la masse Ceci représente un courant moyen de fQg . qui circule de la
tension du circuit de gâchette ggV . Les pertes du circuit de gâchette du transistor MOSFET
sont données par: ggggT VfQP .., = (9)
Les pertes de diode DP dépendent de la chute de tension, du courant d'entrée pvI et du rapport cycliqueα . ( )α−= 1.. pvfwdD IVP (10)
Les pertes de condensateur de sortie CoRMSCoCo RIP .2,= (11)
Les pertes total du convertisseur sont données par
gTCoDSTCTLlossesConv PPPPPPP ,,,, +++++= (12)
En utilisant ces équations, les pertes de puissance et le rendement du convertisseur ‘boost’ sont simulées et comparées aux résultats expérimentaux. Les caractéristiques des composants utilisés pour le calcul des pertes sont données dans l'annexe.
4.2.2-SECTION CONTROLE
Le circuit de commande de système représenté sur la figure 4 est basé sur ‘EV80C196MCS Microcontrôleur Evaluation Board’[3]. Le circuit de commande se compose de: 1) Circuits d'interface qui contient des sondes et des conditionneurs de signal reliés au convertisseur A/D du microcontrôleur; 2) Intel’s 80C196MCS a faible consommation de puissance, CMOS microcontrôleur avec EPROM et RAM externes. 3) Quadripôle différentiel de conducteur de ligne. 4) IC pour la conduction du transistor MOSFET de puissance.

Optimisation du fonctionnement du générateur photovoltaïque Conditions du générateur photovoltaïque
71
Interface circuits
80C196MCS
Alghorithm MC3487 IR2110
Vpv
Ipv
PWM
Gate
Figure 4: Circuit de commande
4.2.2.1 CIRCUIT D’INTERFACE
Les circuits d'interface se composent de capteur de courant, de capteur de tension,
d'isolement et de circuit d'amplification.
4.2.2.1.1-CAPTEUR DE COURANT Dans le but de mesurer la puissance de sortie du générateur photovoltaïque, deux paramètres
sont mesurés instantanément: le courant de sortie et la tension de sortie ; pour cette raison, un
capteur de courant sur phase d’enté du convertisseur est montré sur la figure 1. Une résistance
de 0.2 Ω avec haute précision comme une alternative à un composant LEM (capteur a Effet
Hall) qui couvert généralement le courant du convertisseur en tension avec un offset. Le
choix est justifié par l’élimination du problème offset.
4.2.2.1.2-ISOLATION DU CAPTEUR DE COURANT
Comme le capteur du courant est placé sur phase supérieur d’alimentation du convertisseur,
un circuit d’isolation est nécessaire jusqu’à ce le problème va disparaître. Cette tâche est
accomplie avec un circuit HCPL-7840 appelé amplificateur analogue d'isolement comme
représenté sur le schéma 6, qui est relié directement aux courants du capteur. Une fois utilisée
avec une résistance shunt dans le chemin du courant, l’isolement analogue d'amplificateur
offre la fiabilité, la rentabilité et la taille comparée avec la solution traditionnelle telle que
(capteur a Effet Hall).

Optimisation du fonctionnement du générateur photovoltaïque Conditions du générateur photovoltaïque
72
Figure 6 : HCPL-7840 4.2.2.1.3-CIRCUIT D’AMPLIFICATION DU COURANT Comme le courant du générateur photovoltaïque est capté et est converti en tension, le capteur doit être relié au convertisseur numérique analogue du microcontrôleur et l'alimentation en bout est +5V. Par conséquent, le gain d'amplification est calculé dans telles directions où le courant maximum fourni par le générateur photovoltaïque ne devrait pas excéder +5V. Le circuit d'amplification est montré sur le schéma 2.
HCPL-7840
VIN+
VIN-
VCC
R5
1.0kΩ
OUT+
OUT-1
2
-
+
VCC
VCC
5
3
R11.0kΩ
4
0
VCC
+5V
+15V
-15V
VoutR
Ipv 6
7
R3
2.0kΩ
R2
2.0kΩ
Figure5 Circuit d'amplification du courant.
Les essais subis sur le convertisseur DC-DC prouvent que le courant photovoltaïque
de sortie du générateur ou le courant d’entré du convertisseur DC–DC correctement capté
comme illustré sur le schéma 6. Sur la figure, on peut voir que le courant est très lisse; ceci
signifie que l'inducteur bobiné sur le noyau en ferrite avec un fil de ‘Ritz’ est correctement
conçu. La tension de drain source à travers le transistor MOSFET pendant des périodes
d’amorçage et de blocage est une tension à oscillation basse et à pic.
Figure 6 : Courant d’entrer du convertisseur Boost et tension du transistor MOSFET VDS
IPV VDS
+
- + -
SHIELD
1
2
3
4
8
7
6
5
VDD2
VOUT+
VOUT-
GND2
IDC1 IDD2 VDD1
VIN+
VIN-
GND1

Optimisation du fonctionnement du générateur photovoltaïque Conditions du générateur photovoltaïque
73
4.2.2.1.4-CAPTEUR DE TENSION
Le capteur de tension est placé parallèlement au générateur photovoltaïque, qui est
l'entrée du convertisseur boost. Ce capteur se compose d'une série de résistances utilisées
comme diviseur de tension et calculé de sorte que l'image de la tension maximum d'entrée de
convertisseur doive être égale à +5V. C'est parce que la tension de sortie du capteur est reliée
au convertisseur numérique analogue du microcontrôleur, qui convertit les signaux de la
grandeur entre 0 et +5V. Dans le but de la mesure de la tension de sortie du convertisseur de
boost, un capteur semblable est placé à la sortie de convertisseur. Le schéma 7 montre le
circuit de capteurs de tension.
R1
R2
1
0
Vpv
Vpv
Vout
Figure 7: Circuit des capteurs de tension.
4.2.2.2-CIRCUIT DE GACHETTE Un circuit de Gâchette de transistor MOSFET s’amorce avec une impulsion de tension
En conséquence, le constructeur recommande toujours un circuit push-pull pour conduire
mieux le circuit de Gâchette MOSFET pour le convertisseur réalisé .Nous avons employé le
composant IR2110 comme circuit de Gâchette de transistor pour la raison simple qu’il
contienne un push-pull dans le côté et est particulièrement conçu pour circuit de Gâchette
MOSFET, plus de détail comme représenté sur le schéma 8, nous pouvons trouver sur des
fiches techniques. Le résultat des essais effectués sur le convertisseur boost pendant le
changement en marche et en arrêt du transistor MOSFET aussi bien que le signal appliqué au
circuit de Gâchette avec le rapport cyclique de 46% sont montrés sur le schéma 9.

Optimisation du fonctionnement du générateur photovoltaïque Conditions du générateur photovoltaïque
74
Figure8: Schéma fonctionnel d'IR2110 (fiche technique)
a b c Figure 9 IDS et VDS MOSFET On (a), IDS et VDS MOSFET off (b) et signal de porte avec le
rapport cyclique de 46%(c).
IDS
VDS
VDS
IDS

Optimisation du fonctionnement du générateur photovoltaïque Conditions du générateur photovoltaïque
75
4.2.2.3-TECHNIQUE DE POURSUITE Une technique très répandue de poursuite de MPPT, est basée sur la puissance
‘feedbuck’, qui fait la mesure de la puissance du générateur photovoltaïque et l'emploie
comme variable de ‘feedbuck’. Trois techniques basé la puissance ‘feedbuck’ qui sont
largement répandues dans les systèmes photovoltaïques. Elles sont la technique de
perturbation et d'observation (P&O) [4], la technique incrémentation de conductance (I&C)
[5] et la technique Hill Climbing (H.C) [6].
Les deux techniques perturbation et l'observation, et l’incrémentation de conductance
sont basées sur la même technologie en réglant la tension du générateur photovoltaïque de
parcouru un point optimal qui représente la tension de fonctionnement a point de puissance
maximum. Ce point est continuellement suivi et renouvelé pour satisfaire une équation
mathématique simple 0/ =dVdP , où P et V représentent la puissance et la tension de sortie
du générateur photovoltaïque. En étudiant la relation tension puissance du générateur
photovoltaïque typique représenté sur le figure 10, 0/ =dVdP est le point de puissance
maximum peut toujours être suivi si nous conservons 0/ =dVdP pour n'importe quelle
ensoleillement et température.
0 50 100 150 200 2500
100
200
300
400
500
600
700
800
900
1000
Voltage(V)
pow
er(w
)
G=1000W/m2
G=800W/m2
G=600W/m2
G=400W/m2
G=200W/m2
Figure 10: Caractéristiques tension puissance d'un générateur photovoltaïque pour
différentes valeurs d'ensoleillement à température constante (25°C). (Le signe croix marque le point de puissance maximum)

Optimisation du fonctionnement du générateur photovoltaïque Conditions du générateur photovoltaïque
76
Dans la plupart des applications, le convertisseur du type DC-DC à PWM est employé
comme interface de puissance entre le générateur photovoltaïque et la charge [6]. Le rapport
cyclique de commutation est la variable de commande de ce genre de topologie.
Par conséquent une autre approche [7] à MPPT est basée sur la relation entre la puissance du
générateur photovoltaïque et le rapport cyclique de commutation. La figure 11 montre les
courbes de formes de colline, où P représente la puissance du générateur photovoltaïque et
α le rapport cyclique du convertisseur DC-DC. Mathématiquement les locaux des points de
puissance maximum peuvent être suivis si αddP / est forcé à zéro par la commande.
Figure 11: P-α courbe caractéristique Ce genre de technologie de MPPT est également défini comme technique de Hil Climbing
[8], qui simplifie la structure de commande de système à une boucle de contrôle comme
représenté sur la figure 12.
Figure12 Block diagramme de la technique Hill Climbing
0=αd
dP
0fαd
dP 0pαd
dP
α
P
PhotovotaicG enerator
PowerMeasurement
Switching DC/DCC onverter
SwitchingDuty cycle
Load
MPPTContro ler
PowerDel ivery

Optimisation du fonctionnement du générateur photovoltaïque Conditions du générateur photovoltaïque
77
Dans la technique proposée, un EV80C196MCS microcontrôleur est utilisé comme outil de
la commande de puissance de sortie du générateur photovoltaïque et le rapport cyclique du
convertisseur de DC\DC. Ceci est faite à travers la lecture de la tension (ou courant)
instantané(e) de sortie du générateur et puis la puissance est calculée et comparée à la
puissance précédente de sortie du générateur photovoltaïque.
Selon le résultat de comparaison, le rapport cyclique est ajusté en conséquence et le
processus est répété jusqu'à ce que le point de puissance maximum été atteint. La technique
proposée peut être facilement mise en application également avec les circuits analogiques, au
lieu de EV80C196MCS microcontrôleur, mais l'utilisation d’une tel carte a l'avantage qu'elle
peut en outre produire des signaux MLI de commande de l’onduleur. D'ailleurs, elle permet
la modification facile si des sources d'énergie renouvelable additionnelles sont employées Ce
type de microcontrôleur a été choisi parce qu'il a les dispositifs nécessaires pour le système
proposé, tel qu'un convertisseur analogique numérique, des sorties MLI, l'architecture de 16
bits, la fréquence de base élevée, la faible consommation d'énergie et le bas prix.
L'organigramme de la technique de Hill Climbing [9] est illustré sur le schéma 13.
L'incrément d'étape du rapport cyclique est représenté avec la lettre ‘d’, qui est un nombre
constant entre 0 et 1. L'augmentation ou le décrémentation du rapport cyclique α représenté
par ( )d+ ou ( )d− indique la direction qui doit être suivie sur la courbe de rapport α−P , où
P représente la puissance photovoltaïque de sortie du générateur et α est le rapport cyclique
d'un mode de commutation de convertisseur de DC/DC. Puisqu'un registre de 8 bits d'unité
centrale de traitement est utilisé pour stocker le rapport cyclique de PWM dans
l'application actuelle, la valeur de est rendue égale à 1/256. Au début, le rapport cyclique est
incrémenté avec la valeur ( )d+ . Dans chaque itération, la tension et le courant d'entrée de
convertisseur de DC/DC sont mesurés et la puissance d'entrée est calculée. La puissance
d'entrée est comparée à sa valeur calculée dans l'itération précédente et selon le résultat de la
comparaison; le rapport cyclique α est incrémenté ou décrémenté avec le nombre d . Puis, le
rapport cyclique de PWM est changé en conséquence Le processus de MPPT est montré sur
le schéma 14. Le point de départ change selon les conditions atmosphériques, alors que le
rapport cyclique est changé sans interruption, selon l'algorithme mentionné ci-dessus, ayant
pour résultat l'opération d'état d'équilibre de système autour du point maximum de puissance.

Optimisation du fonctionnement du générateur photovoltaïque Conditions du générateur photovoltaïque
78
Read: V(N), I(N)
Calculate the power P(N) = V(N).I(N)
P(N) =P(N-1)
P(N) > P(N-1) Alpha(N) = Alpha(N) + d
P(N-1) = P(N)
Alpha(N) = Alpha(N) - d
NO YES
NO
Initialization
YES
Figure 13 Organigramme de la technique de Hill Climbing.
Figure 14: Processus de suiveur MPPT
Duty Cycle
Pmax
PV Output Power
Possible starting points
Steady state Operation

Optimisation du fonctionnement du générateur photovoltaïque Conditions du générateur photovoltaïque
79
4.2.3-RESULTATS EXPERIMENTAUX
4.2.3.1-RENDEMENT DU CONVERTISSEUR BOOST Au-delà de l'exactitude du suiveur, le rendement du convertisseur est un autre paramètre
important en impact avec la puissance qui peut être extraite à partir du générateur
photovoltaïque. Pour les résultats expérimentaux obtenus avec la topologie utilisée du
convertisseur, le rendement peut arriver jusqu' à 94%. La figure15 révèle la puissance
d'entrée vis-à-vis du rendement. Sur la figure, les résultats expérimentaux sont comparés au
rendement simulé et on peut voir que les deux courbes sont relativement identiques aux
basses charges, le rendement est petit mais peut atteindre 92% avec la puissance du sortie de
20W, le rendement se maintient en valeur autour de 94% aux charges moyennes et élevées et
est très constante dans une large gamme de puissance.
0 20 40 60 80 100 120 140 160 180 2000.8
0.82
0.84
0.86
0.88
0.9
0.92
0.94
0.96
0.98
1
input pwer (w)
Effi
cinc
y
Experimental
Simulated
Figure15. Résultats expérimental et simulé du rendement
4.2.3.2 PUISSANCE DE SORTIE DU CONVERTISSEUR BOOST
La figure 16 illustre la puissance de sortie du convertisseur en fonction de l'évolution
du rapport cyclique. En outre, la puissance d'entrée est aussi bien tracée sur la même figure en
fonction du rapport. On peut voir de la figure que les pertes de convertisseur, qui présentent la
différence entre les courbes de la puissance d'entrée et la puissance de sortie, varient en
fonction du rapport cyclique. Au rapport cyclique 0,5, les pertes correspondantes sont plus
importantes que toutes les autres valeurs du rapport cyclique.

Optimisation du fonctionnement du générateur photovoltaïque Conditions du générateur photovoltaïque
80
0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.540
60
80
100
120
140
160
180
200
Duty cycle
Pow
er-W
-
Input Power "o"Output Power "*"
Figure 16 Puissance de sortie du convertisseur vis à vis du rapport cyclique.
4.2.3.3 PERFORMANCE DU SPPM
Un arrangement d’un laboratoire a été mis en application afin de vérifier la performance du suiveur maximum de point de puissance proposé dans le travail actuel. Deux groupes de panneaux ont été ajustés, chacun d'eux est composé par sept séries de modules de PV reliés en série. Un groupe est relié directement à une charge résistive et l'autre reliée à une charge résistive semblable, mais le SPPM est placé entre les modules et la charge, comme représenté sur la figure17. En un jour ensoleillé, où l'irradiation solaire moyenne est 1000 W/m2, 12 sessions de mesure ont été effectuées. Les résultats des expositions, figure18, représentant des données rassemblées. Le panneau relié à la charge par le SPPM, fournit 40% plus d'énergie à la charge que l'autre. La figure18 illustre les résultats pour des données rassemblées de l'insolation différente et à température constante.

Optimisation du fonctionnement du générateur photovoltaïque Conditions du générateur photovoltaïque
81
Photovoltaicgenerator
R
W
2 a
Photovoltaicgenerator
R
W1
3
MPPT
5
B
Figure17. Arrangement expérimental: Circuit sans MPPT (a), Circuit avec MPPT (b).
Figure 18: Données collectées
0306090
120150180210
1 2 3 4 5 6 7 8 9 10 11 12
sample
pow
er (W
)
pow er w ithout MPPT(W)pow er w ith MPPT(W)insolation(W/m2)/20

Optimisation du fonctionnement du générateur photovoltaïque Conditions du générateur photovoltaïque
82
4.2.3.4-VALIDATION DE LA POURSUITE DE PUISSANCE MAXIMALE Le programme développé pour le maximum point de puissance du suiveur en langage
C est appelé : tableau microcontrôleur d’évaluation EV80C196MCS. Le programme exécuté
est visualisé sur l’écran du PC, où les changements en valeurs ……..réservés pour des
variables peuvent être lus facilement. Le signal de contrôle PWM généré par le
microcontrôleur et appliqué au convertisseur DC/DC MOSFET GATE est visualisé sur
écran.
Sur les figures de 19 (a) à 23 (a), on peut lire respectivement le changement en valeur
du tableau du rapport cyclique de la table ALPHA. Ce changement en valeur du rapport
cyclique est du à la variation de la valeur de puissance qui est affecté par la variation de la
valeur du courant et de tension. Regardant la variation des valeurs du rapport cyclique, aussi
bien que la variation des valeurs de la puissance. On peut conclure que la variation est celle
dans la direction de Hill Climbing, cela veut dire que l’algorithme du suiveur maximum de
puissance suit la trajectoire montrée sur la figure 14.
Sur les figures de 19 (b) à 23 (b), nous pouvons observer respectivement la variation de la
pulsation du signal la plus large, qui veut dire la variation du rapport cyclique du ‘MOSFET
gate’.

Optimisation du fonctionnement du générateur photovoltaïque Conditions du générateur photovoltaïque
83
a
b

Optimisation du fonctionnement du générateur photovoltaïque Conditions du générateur photovoltaïque
84
Figure 19: programme MPPT exécuté, vu sur l’écran du PC (a), variation du déclencheur du signal du rapport cyclique (b)
a
b

Optimisation du fonctionnement du générateur photovoltaïque Conditions du générateur photovoltaïque
85
Figure 20: programme MPPT exécuté, vu sur l’écran du PC (a), variation du déclencheur du signal du rapport cyclique (b)
a
b

Optimisation du fonctionnement du générateur photovoltaïque Conditions du générateur photovoltaïque
86
Figure 21: programme MPPT exécuté, vu sur l’écran du PC (a), variation du déclencheur du signal du rapport cyclique (b))
a
b

Optimisation du fonctionnement du générateur photovoltaïque Conditions du générateur photovoltaïque
87
Figure 22: programme MPPT exécuté, vu sur l’écran du PC (a), variation du déclencheur du signal du rapport cyclique (b)
a
b Figure 23: programme MPPT exécuté, vu sur l’écran du PC (a), variation du déclencheur du signal du rapport cyclique (b)

Optimisation du fonctionnement du générateur photovoltaïque Conditions du générateur photovoltaïque
88
4.3. CONCLUSION
Dans ce chapitre, qui est réservé à la conception et la réalisation du point maximum de la puissance du suiveur, une étude du profil de la puissance et du profil de contrôle du MPPT est faite afin d’une optimisation des paramètres du générateur photovoltaïque. La technique de contrôle Hill Climbing est choisie pour la recherche du point maximum de puissance parce qu’elle nécessite uniquement une seule boucle de contrôle. Le choix de l’accroissement du convertisseur est justifié par le rendement élevé du convertisseur aussi bien que l’amplification de la tension de sortie.
Les résultats expérimentaux subis au niveau du laboratoire sont trouvés satisfaits au but fixe de ce travail comparé aux travaux réalisés dans ce domaine. Le rendement du convertisseur réalisé Est trouvé plus que 94%, soit par simulation ou expérimentalement. Le générateur photovoltaïque se pourvoie à 40% plus d’énergie à la charge avec le maximum point de puissance comme est montré sur la figure 17. Par conséquent, les paramètres électriques du générateur photovoltaïque sont optimisés avec attention au rendement et au coût des cellules solaires.

Optimisation du fonctionnement du générateur photovoltaïque Conditions du générateur photovoltaïque
89
3.4-REFERENCES
[1] Ziyad .S, Step-up maximum power point tracker for photovoltaic array , Solar Energy vol.44.N° 1. pp 57-61.1990. [2] Geoffrey.R, Cascaded DC-DC converter connection of photovoltaic modules, IEEE, Transaction on power electronics Vol 10 N°. 4. 2004 [3] Intel User’s manual. EV80C196MCS Microcontroller Evaluation Board. 1992. [4] C.Hua, J.Lin and C.Shen “ Implementation of a DSP- controlled photovoltaic system with peak power tracking”, IEEE Trans .Industrial Electronics, Vol 45, pp 99-107, feb 1998 [5] K.H. Hussein, I.Muta , T.Hoshino and M Osakada, “Maximum photovoltaic power tracking : an Algorithm for rapidly changing atmospheric Conditions” IEE, Generation Transmission and Distribution Vol 142, pp 59-64, Jan 1995. [6] J.M. Enrique, “Theoretical assessment of maximum power point tracking efficiency of photovoltaic facilities with different converters topologies”, Solar Energy, volume 81, Issue, 1, pp31-38, January 2007. [7] K. Koutroulis and K. Kalitsakis “Development of microcontroller based photovoltaic maximum power point tracking control system” IEEE Trans in Power Electronics , Vol 16, pp46-54 , Jan 2001. [8] T.Senjyu, ‘Maximum power point tracker using Fuzzy control for photovoltaic array’, IEEE Int. Conference Industrial Technology, pp 143-147, 1994 [9] Arrouf.M, ‘Optimization of photovoltaic pumping system controlled by EV80C196MC Microcontroller Evaluation Board’ JAAUBAS, pp192-201, 2007.

Optimisation du fonctionnement du moteur asynchrone
90
Chapitre 5
OPTIMISATION DU FONCTIONNEMENT DU MOTEUR ASYNCHRONE
5.1-INTRODUCTION
Le fonctionnement d'une pompe exige une machine qui peut produire la rotation. La plupart des pompes sont tourné par les moteurs électriques. Pour conduire les systèmes de pompe photovoltaïques, soit des moteurs à courant continu ou des moteur à courant alternatif, sont actuellement le meilleur choix. Le système de pompage photovoltaïque est caractérisé par le fonctionnement à vitesse variable. Cette caractéristique exige une commande de réglage de la vitesse qui peut contrôlé d’une manière précise et continu la vitesse et le couple avec des transitions performantes et un rendement élevé. Par conséquent, un système de pompage basé sur un moteur asynchrone peut être une proposition attractive où la fiabilité et le fonctionnement sans entretien sont importants. D'ailleurs, en raison croissant du rapport performance/cout des dispositifs à semi-conducteurs et des circuits logique, l'utilisation d'un moteur asynchrone rigide et moi chère devient également une alternative économique au système de pompage avec moteur à courant continu. Par conséquent dans le travail actuel un moteur asynchrone a été étudié et l'analyse a été effectuée du point de vue l'optimisation du système. Les résultats analytiques obtenus ont été employés dans la réalisation pratique du travail actuel. C’est connu que le moteur asynchrone alimenté à partir d’une source de tension normale fonction avec un rendement maximum pour la charge et la vitesse nominal. Mais quand le même moteur est alimenté du réseau d’un système d'alimentation solaire, son fonctionnement devient non optimal. Ceci dû au changement du niveau de l’ensoleillement solaire. 5.2- TECHNOLOGIE DES MOTEURS
On ce qui concerne la technologie des moteur, il y a trois types de moteur actuellement utilisés pour des applications de pompage photovoltaïques.
Moteur à courant continue Moteur à courant continu à aiment permanant sans balais. Moteur à courant alternatif.

Optimisation du fonctionnement du moteur asynchrone
91
5.2.1-MOTEUR A COURANT CONTINU En termes de simplicité le moteur à courant continu est une option attractive parce que le générateur photovoltaïque produit du courant continu, et moins d'équipement spécialisé sont nécessaire pour traitement de puissance. Pour un moteur à courant continu conventionnel les pertes d'énergie qui se produisant dans les enroulements est élevé, par conséquence le rendement global est faible. Si des aimants permanents sont utilisés pour produire le champ magnétique, aucune puissance ne sera consommée dans les bobines d'excitation et par conséquent des rendements plus élevés seront obtenu. Cette augmentation de rendement est très appropriée aux systèmes de pompage photovoltaïques. Le problème avec le moteur à courant continu c’est qu'il a besoin des balais pour la commutation. Les balais détériorent avec le temps et doivent être remplacées après approximativement 1000 heures de l'opération [1], ce qui est très incommode parce que ceci signifie un supplément l'entretien et des coûts 5.2.2-MOTEUR A COURANT CONTINU SANS BALAIS
Ces dernières années, il y a eu une croissance rapide de l'utilisation du moteur à courant continu sans balais en tant que machine rotative pour les systèmes de pompe photovoltaïques.
Un moteur a courant continu sans balai est une machine électrique tournante où le stator est un stator classique triphasé comme celui d'un moteur asynchrone et le rotor a les aimants permanents montés extérieurs. À cet égard, le moteur à courant continu sans balais est équivalant a un moteur à courant continu avec les commutateur sont inversé où l’aiment tourne tandis que les conducteurs restent stationnaires. Dans les moteurs à courant continu avec commutateur, la polarité du courant est changé par les commutateur est les balais. Par contre, dans les moteur à courant continu sans balais l'inversion de polarité est assuré par les transistors de puissance commutant en synchronisation avec la position de rotor. Donc, les moteurs les moteur à courant continu sans balais incorporent souvent les sondes de position internes ou externes pour sensé la position réelle du rotor [2].
Les moteur à courant continu sans balais nécessite une excitation avec un onduleur triphasé de fréquence et amplitude variable. L’onduleur est généralement assure la commutation électronique et la régulation du courant.

Optimisation du fonctionnement du moteur asynchrone
92
5.2.3-MOTEUR A COURANT ALTERNATIF
Les moteurs a courant alternative comme le moteur asynchrone ; sont des moteur sans balais avec un rotor de construction robuste qui permet le fonctionnement fiable et sans entretien. La simplicité de la construction du rotor a également comme conséquence la basse du prix du moteur et un rapport puissance /poids plus élevé. C'est l'avantage principal des moteurs asynchrone sur les moteur à courant continu et l’un des raisons pour lesquelles ce type de moteur est le plus utilisée dans les systèmes de pompage photovoltaïques. Néanmoins, le moteur à induction sous sa format standard, contrairement au moteur a courant continu, sont inconvenant majeur est d'être inflexible dans la variation de vitesse. Ce type de moteur à courant alternatif tourne à une vitesse l’égerment inférieur à la vitesse de synchronisme et sa vitesse et déterminé par la fréquence de source d’alimentation et le nombre de pôles du stator. Donc une gamme de variation de la vitesse du moteur asynchrone et seulement possible lorsque la fréquence de la source d’alimentation est possible. Cela signifie que l’utilisation du moteur asynchrone dans les applications photovoltaïque de pompage nécessite un circuit électronique de commande à fréquence variable (onduleur) pour commander la vitesse, et ceci ajoute un coût de plus au système. L’inclusion de l’onduleur dans le système permettre des performances excellentes à la vitesse de rotation du moteur. Tableaux.1 résume les avantages et les inconvénients des moteurs mentionner ci-dessus. Dans le but de ce travaille le moteur asynchrone sera étudier avec plus de détail dans la section suivante
Type du moteur Les advantages Les inconvenient
Moteur à courant continu -Simple et efficace pour les faible charge. -Ne nécessitant pas un circuit de commande compliqué
-Les balais doivent être remplacé périodiquement
Moteur à courant continu sans balais
Un bon rendement Ne demande pas de maintenance
-La commutation électronique ajoute des dépenses de plus et avec le risque de défaillance
Moteur à courant alternative Des larges gammes disponibles pour des larges gammes de charge Moins cher que le moteur à courant continu
-Moins efficace que le moteur à courant continu -Necessities un onduleur.
Tableaux 1: resume les avantages et les inconvenient des different types des moteurs généralement utilisé dans des applications photovoltaïques

Optimisation du fonctionnement du moteur asynchrone
93
5.3- PRINCIPE DE FONCTIONNEMENT DU MOTUR ASYNCHRONE
Les enroulements du stator sont alimentés par un system de tension triphasé équilibré, qui produit des tensions induit dans les enroulements du rotor due au principe des transformateurs. La distribution des enroulements du stator est arrangée de façon que il y a an effet des multiples pôles qui produit plusieurs périodes de force magnétomotrice autour de l’entrefer. Ce champ établit une distribution spatiale sinusoïdale de la densité du flux dans
l’entrefer. La vitesse de rotation du champ est appelé la vitesse de synchronisme ( sω or sn ),
qui est définie par :
pfsrads /4)/( πω = or pftns /120min)/( = (1)
où f est la fréquence de la source d’alimentation et p le nombre des pôles [3,4]. Un paramètre utile dans les étude des moteur asynchrone est le glissement s :
s
s
s
s
nnn
s−
=−
=ω
ωω (2)
où ω ou n est la vitesse du rotor Le circuit équivalant par phase du moteur asynchrone est illustré sur la figure1a.
L’expression du couple en fonction du glissement du moteur asynchrone peut être obtenu par l’application du théorème de Thevenin’s au model du circuit du figure1b [5]. Le circuit du rotor, référée au stator, peut être considéré comme étant attaché à un générateur équivalent au de Thevenin comme illustré sur la figure 2b. Sur la figure1 la tension ente les bornes 1 et 2 du
circuit ouvert sera la fraction phV apparaître à travers mjX .
21
21 )( m
mPhTh
XXR
XVV
++= (3)
Vph
R1 JX1
JXm
1
5
2
VTh
6
9
10
JX'2
R'2/s
4
3
7
8
JX'2
R'2/s
ZThI1 I'2
Figure.1 : (a) Le circuit équivalent par phase d’un moteur asynchrone triphasé. (b) Application du théorème Thevenin’s au model du circuit du moteur asynchrone. Vph, la tension au bornes d’une phase ; VTh, tension Thevenin; R1, résistance du stator; X1, réactance du stator; Xm, réactance magnétisation ; R’2 , résistance du rotor référé au stator; X’2, réactance du rotor référé au stator; ZTh, impédance de Tevenin.

Optimisation du fonctionnement du moteur asynchrone
94
L’impédance du générateur de Thevenin sera l’impédance qui apparaît entre les
bornes 1et 2 lorsque le générateur PhV est court circuit :
ThThm
mTh jXR
XXjRjXRjX
Z +=+++
=)(
)(
11
11 (4)
21
21
21
)(.
m
mTh XXR
XRR
++= et
[ ]2
12
1
112
1
)()(
m
mmTh XXR
XXXRXX
++++
= (5)
Une expression de '2I peut être obtenu on introduisant les quantités du générateur
Thevenin:
2'2
2'2
'2
)()/( XXsRR
VI
ThTh
Th
+++= (6)
Après le couple électromagnétique est donné par [1]
2'2
2'2
'2
2'2'
2 )()/()/(33
XXsRRsRV
sRIT
ThTh
Th
ssem +++
==ωω
(7)
Puisque de l’équation (3) ThV est proportionale à la tension aux bornes du moteur,
notant que pour n’importe quelle vitesse le couple est proportionnel au carré de la tension d’alimentation.
Il y a un couple maximum maxT dans la gamme de fonctionnement du moteur, appelé
pull-out torque, qui est donné par [3].
2'2
2
2
max)(2
3XXRR
VT
ThThTh
Th
s +++=
ω (8)
5.3.1-TECHNIQUE DE CONTROLE DU MOTEUR
La vitesse des moteurs asynchrone peut être commandée par la variation de la fréquence de la source, mais la tension d’alimentation peut être considéré proportionnel au produit de la fréquence et le flux. Si la tension est maintenue fixe à sa valeur nominale tandis que la fréquence est réduite au-dessous de sa valeur nominale, le flux augmentera. Cela provoque la saturation du flux de l’entrefer. Pour les fréquences faibles, la réactance va décroître et le courant du moteur va augmenté. Pour évité la saturation et minimisé les pertes, le moteur est commandé par le flux de l’entrefer de manière que on fait varies la fréquence et la tension de la source d’alimentation pour maintenir le rapport tension fréquence presque constant ou bien pour maintenir le couple constant [6,7].

Optimisation du fonctionnement du moteur asynchrone
95
Si la fréquence est augmenté au delà de sa valeur nominal, le flux et le couple diminueraient.
Si la vitesse de synchronisme correspond a nf est considéré comme vitesse de base
snω ou snn la vitesse de synchronisme pour n’importe qu’elle fréquence devient [8]
sns kωω = ou sns knn = (9)
Avec nffk /= (10)
L’expression des ThR et ThX de l’équation (5) devient :
2
12
1
2
1
⎟⎟⎠
⎞⎜⎜⎝
⎛ ++⎟⎟
⎠
⎞⎜⎜⎝
⎛
⎟⎟⎠
⎞⎜⎜⎝
⎛
=
n
m
n
m
Th
fXX
fR
fX
RR et 2
12
1
112
1
⎟⎟⎠
⎞⎜⎜⎝
⎛ ++⎟⎟
⎠
⎞⎜⎜⎝
⎛
⎟⎟⎠
⎞⎜⎜⎝
⎛ +⎟⎟⎠
⎞⎜⎜⎝
⎛+⎟⎟
⎠
⎞⎜⎜⎝
⎛
⎟⎟⎠
⎞⎜⎜⎝
⎛=
n
m
n
m
n
n
mth
fXX
fR
fXX
fX
fR
fX
fX (11)
En remplacent les équations (5), (11) et (13) dans l’équation (10), le rapport vfK de la tension
de phase ( )LV et la fréquence ( )f peuvent être déterminé pour un couple maximum constant
par l’équation suivant :
fVfX
fX
fR
fR
fXX
fR
kT
K LNn
ThThTh
n
m
mvf /
2'2
'2''2
12
1max =⎥⎥
⎦
⎤
⎢⎢
⎣
⎡
⎟⎟⎠
⎞⎜⎜⎝
⎛++⎟⎟
⎠
⎞⎜⎜⎝
⎛+
⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛ ++⎟⎟
⎠
⎞⎜⎜⎝
⎛= (12)
= fVLN / pour nff p
avec sn
mm
Xk
ω2
2
= (13)
où ( )phLN VV 3= la tension nominal du moteur . Donc, l’expression du couple de l’équation
(7) devient.
( )2'
2'2'
2'
'2
2
12
1
2 /2
⎟⎟⎠
⎞⎜⎜⎝
⎛++⎟⎟
⎠
⎞⎜⎜⎝
⎛ +⎟⎟⎠
⎞⎜⎜⎝
⎛ ++⎟⎟
⎠
⎞⎜⎜⎝
⎛=
n
ThTh
n
m
vfmem
fX
fX
sfRsR
sfR
fXX
fR
KkT (14)
Tem est aussi appelé le couple développé par le processus de la conversion d’ énergie électromagnétique entre le stator et le rotor du moteur . Donc, l’énergie électromagnétique est définie comme suit [6,7].
( ) LKmechemsnemem PPTskTP +=−== 1ωω (15)

Optimisation du fonctionnement du moteur asynchrone
96
où mechP est la puissance mécanique de sortie LkP les pertes constante (la plupart
rotationale). En remplacent emT de l’équation (14) dans l’équation (15), le glissement s peut
être déterminé par la racine de l’équation quadratique suivante :
0212
21 =++ Rsksk (16)
1
211
222
24
kRkkk
s−−−
= (17)
avec
( ) 23020
'1 fkkRk Th ++= ; 2
30'2
'2 2 fkRRk Th −= ;
( ) ( )( )21
21
2
10 // nm
vf
fXXfR
Kk
++= ;
2'
20 ⎟⎟⎠
⎞⎜⎜⎝
⎛+=
n
mTh
fX
fX
k ; emn
snm
PfRkk
kω'210
302
= . (18)
A partir du model du circuit de la figure 1(a) et en utilisant l’équation (10), l’impédance
équivalente d’entré inZ est donné par
ininin jXRZ += (19)
avec
( )( ) ( )2'
222'
2
'2
2
1/
/
m
min
XXksR
sRXkRR
+++= ;
( ) ( )( ) ( )2'
2'2
2'2
'2
'2
2'2
1/
/
m
mmin
XXkXsR
XXkXsRkXkXX
++
+++= ;
( )inin RX /tan 1−=ϕ . (20)
Le courant de phase du stator LI1 peut être calculé par :
inphL ZVI /1 = (21)
La puissance électrique d’entré du moteur inP est donné par :
ϕcos3 1LLin IVP = (22)
Donc le rendement du moteur est définie par :
in
mechm P
P=η (23)

Optimisation du fonctionnement du moteur asynchrone
97
5.4- ONDULEUR
L’alimentation du moteur asynchrone dans un système photovoltaïque par un générateur solaire, nécessite l’utilisation de l’onduleur qui peut transformé la tension continu produit par le générateur solaire en tension alternatif triphasé avec l’amplitude et la fréquence variable. En pratique, il y a deux types essential d’onduleurs : L’onduleur alimenté par un courant contrôlé à partir d’une source de courant continu (onduleur de courant) et l’onduleur alimenté a partir de la source de tension continu (onduleur de tension). Pour l’application dans les systèmes photovoltaïque, l’onduleur de tension est considéré comme bon choix [9]. Autres type d’onduleur tel que l’onduleur multi nivaux [10] qui est bien adapté pour une telle application peuvent être utilisé.
5.4.1-PRINCIPE DE FONCTIONNEMENT
L’onduleur de tension utilisé pour la finalisation de ce travaille est branché sur un générateur photovoltaïque à travers un adapter d’impédance (MPPT). Donc, l’onduleur de tension est indirectement branché sur le générateur photovoltaïque.
La figure 1 montre le circuit de base de configuration du type généralement utilisé dans les system photovoltaïque. La capacité branché a l’entré des borne de l’onduleur, a pour rôle de lisser la tension de sortie de la source continu et de réduire l’impédance de la source. Les bornes de sortie cotée puissance est composé de l’arrangement en pont de trois phases. La sortie triphasée est obtenue en préservant un décalage mutuel de phase de 120 degrés entre les séquences d’amorçage des transistors dans les trois bras de l’onduleur. Si l’onduleur alimente une charge inductive, les diodes de récupération branchée en parallèle avec chaque transistor, assurent le chemin pour le courant inverse qui permit le retour de l’énergie a travers l’onduleur vers la source continu. La tension de sortie de l’onduleur est commandée par en modulation de largeur d’impulsion sinusoïdale (MLI) ; basé sur la comparaison d’une onde rectangulaire de haute fréquence avec une onde de modulation de référence sinusoïdale à la fréquence de sotie comme illustrée sur la figure8. Les instants d’amorçage sont déterminés par l’intersection des deux ondes.
Les signaux de la commande (MLI) sont générés par un microcontrôleur d’une manière que le rapport entre la tension et la fréquence de sortie de l’onduleur est maintenu constant. En raison de la fluctuation de la puissance maximum d’entrée, généré par le générateur photovoltaïque a travers le SPPM selon le niveau de la température et le rayonnement solaires, la puissance de sortie de l’onduleur est variable.

Optimisation du fonctionnement du moteur asynchrone
98
1A 1B 1CC
1
3
4gate driving and interfacing circuit
EV80C196MCS MicrocontrollerEvaluation Board
2
5
Figure1 : Configuration du circuit de base de l’onduleur de tension 5.4.2-L’ONDULEUR REALISE
L’onduleur réalisé est composé de deux parties ; partie puissance et partie commande. La partie puissance est basé sur a MITSIBISHI Intelligent Power Module (PM10CSJ060) [11], tendis que la partie commande est basé sur une carte Intel Microcontrôleur EV80C196MCS. Les deux parties sont connectées l’un à l’autre par un circuit d’interface.
5.4.2.1-PARTIE PUISSANCE
La partie puissance est développée avec l’onduleur de type Intelligent Power Module (PM10CSJ060). L’onduleur PM10CSJ060 c’est une matrice a base isolé conçu pour les applications de puissance avec une fréquence de fonctionnement peut aller jusqu'à 20Khz ,un circuit de commande et de protection pour les IGBT’s et les diodes de récupération de puissance comme illustré sur la figure3(a). Figure 3(b) montre le circuit interne de la matrice intelligent power module, les six IGBT’s et leur diode de roue libre connecté en parallèle. Les IGBT’s de la partie supérieur du circuit sont commandé par un circuit de gâchette de haute tension intégré (HVICs), et les IGBT’s de la partie inférieur sont commandé par des circuit intégré de basse tension (LVIC’s). En plus, il y a un circuit de protection logic contre les courts circuits, sur intensité, l’augmentation de la température et la basse de tension d’alimentation [12]. La matrice intelligent de puissance est spécialement conçu pour la commande des moteur avec vitesse variable et caractérisé par un fonctionnement à rendement et à fréquence élevé. Le schéma électrique de l’onduleur réalisé est donné en Annexe A

Optimisation du fonctionnement du moteur asynchrone
99
(a) (b) Figure3: Partie puissance : (a) Matrice intelligent de puissance (PM), (b) circuit interne [13]. 5.4.2.2-PARTIE CONTROLE
Dans ce travaille, le moteur asynchrone est commandé en boucle ouvert a rapport tension fréquence constant. Cela parce que, il est opérationnelle seulement dans un seul quadrant et la précision et la réponse de vitesse sont modestes dans ce travalille [16]. Etant donné que le moteur asynchrone est alimenté par l’onduleur de tension réalisé, la partie commande de l’onduleur est réalisé de façon que le rapport entre la tension et la fréquence de la sortie de l’onduleur soit toujours constant. La partie commande de l’onduleur est réalisé sur la base d’une carte microcontrôleur EV80C196 MCS. 5.4.2.2.1-EV80C196 MCS EVALUATION BOARD
Le MCS96 c’est microcontrôleur de grand performance avec 16-bit CPU et au moins 230 bytes de RAM. C’est une machine de registre -a- registre, donc l’accumulateur n’est pas nécessaire, est la plupart des opérations peuvent être rapidement exécuté à partir d’un registre à l’autre. En outre, les opérations de registre peuvent commander les nombreux périphériques qui sont disponibles sur les circuits intégrés. Ces périphériques incluent un port série, un convertisseur analogique digital, sortie MLI, plus que 48 lignes entrées sortie (I/O) et un sous système entré sortie a grand vitesse qui possède deux 16-bit timer/conters, un 8-nivaux entré capture FIFO et 8-entrie programmable générateur de sortie .
La machine peut être divisée en quatre sections [14] afin de décrire son opération; un schéma fonctionnel est montré sur la figure 4. Il y a l’unité CPU et architecture, l’ensemble d’instruction, les périphériques et l’unité des bus.

Optimisation du fonctionnement du moteur asynchrone
100
Figure 4 : schéma fonctionnel du MCS 96
5.4.2.2.2 GENERATEUR DES SIGNAUX (WFG)
L’unique caractéristique de EV80C196MCS Microcontrôleur Evaluation Board c’est le circuit générateur des signaux [15]. Le générateur des signaux a trois parts principales un générateur de base de temps, phase drive channels(canaux transmission de phase) et des circuits de commande. Le générateur de base de temps établit la période de la porteuse, phase drive channels détermine le rapport cyclique, et les circuits de commande déterminent le mode de fonctionnement et commandent la génération d'interruption.
Ce périphérique simplifie la partie hardware utilisé pour générer les signaux MLI synchronisées. Le WFG a trois models MLI synchronisés, chacun avec un registre comparateur phase, un générateur de temps mort et deux sorties complémentaires programmables. Le WFG permet la génération de trois paires complémentaires indépendantes de MLI. Cependant, les MLI partage la même fréquence de porteuse, un temps mort et le mode de fonctionnement. Le WFG exige l'intervention d'unité centrale seulement pour changer le rapport cyclique de LMI. Un schéma fonctionnel du générateur de forme d'onde est montré en figure 6.
Le WFG est divisé en trois sections fondamentaux: Le générateur de base de temps, phase drive channel et l’unité de commande
Vref AnGnd
A/D Converter
S / H
MUX
C P U
232 byte
Registers
ALU
Microcoded sequenser
Frequency Ref
Clock Gen
Interrupt Controller
8 k byte On-chip EPROM
Memory Controller
Queue
Control Signals
Port 3
A/D Bus
Port 4
Port 0
Watchdog Timer
Serial Port
Baud Rate Gen.
T2 Capt
Timer 2 Timer 1
Port 2 Multiplexer PWM High Speed
1/0
Hold Hlda Breq
Port
A/D Port 0 Port 2 Alternate Function
HSI HSO Port 1
16
8

Optimisation du fonctionnement du moteur asynchrone
101
Le générateur de base de temps établit la période de la porteuse pour les MLI. Cette période est déterminée par la valeur de registre WG_ RELOAD, avec le mode de fonctionnement. Le générateur de base de temps fonctionne en 2 modes différents, génération des signaux MLI centered or edge aligned.
Dans le travail actuel le mode MLI centered edge est employé pour entraîner le moteur asynchrone, car les signaux obtenus contiennent le minimum d’harmonique. En conséquence un fonctionnement plus efficace du circuit de puissance et du moteur. En plus, la fréquence porteuse est efficacement doublée comparée au mode aligné edge.
Les canaux d'entraînement de phase déterminent le rapport cycliquedu MLI. Il y a trois canaux indépendants d'entraînement de phase, chacun avec deux sorties programmables. Chaque conducteur de phase contient un générateur programmable de temps - mort, qui empêche les sorties complémentaire d'être affirmé en même temps.
L'unité de commande contient les registres qui déterminent le mode de fonctionnement et toute autre information de configuration
5.4.2.2.3-CONVERTISSEUR ANALOGIQUE NUMERIQUE
Le convertisseur analogique numérique peut convertir une tension analogique en résultat de 8 ou 10 bits digital et active l'interruption d’attente analogique -numérique lorsque il stocke le résultat. Il peut surveillent également l’entrée et active l'interruption d’attente analogique -numérique lorsque la tension d'entrée augmente au-dessus ou sous de la tension de seuil programmée. Comme représenté sur la figure 7, le système de convertisseur possède un multiplexeur de 8 canaux, un échantillonneur, et la prise de 10 bit d'approximation successive de conversion analogique numérique. La conversion peut être exécutée sur un de huit canaux. Une conversion peut être faite dans de aussi peu que les 91 état de temp.
Le convertisseur analogue numérique emploie un algorithme d'approximation successif pour exécuter la conversion analogue numérique. Le convertisseur se compose de chaîne de 256 résistances, d'un comparateur, des condensateurs d'accouplement et d'un registre de10-bit d'approximation successive avec la logique qui guident le processus. La chaîne de résistance assures les étapes de 20mv (V référence = 5.12), alors que
l'accouplement capacitif crée les étapes de 5mv dans les tensions de la chaîne de 20mv. Par conséquent, 1024 tensions internes de références sont disponibles pour la comparaison avec l'entrée analogique pour produire des résultats d'une conversion 10-bit. Dans le mode de conversion de 8 bits, seulement la chaîne résistive est employée, fournissant 256 niveaux de tensions de référence internes. Le convertisseur analogue numérique décrit au-dessus est un des ports d'entré /sortie du carte microcontrôleur EV80C196MC . Ce port est employé pour convertir l'image de la tension d'entrée d’onduleur de sorte qu'il puisse être employé dans le

Optimisation du fonctionnement du moteur asynchrone
102
programme pour la génération du rapport tension fréquence constante de l’alimentation du moteur.
Figure 6: block diagramme du générateur des signaux
CPU BUS
TIME BASE GENERATOR
WG-RELOAD BUFFER WG_RELOAD
UPDATE WG_RELOAD LD
RELOAD COMPARATOR
WG_COUNT=1 WG INTERRUPT
WG_COUNT=WG_RELOAD
TO OTHER PHASE DRIVER CHANNELS
PHASE DRIVER ONE OF THREE CHANNELS
PHASE COMPARATOR
DEAD TIME & OUTPUT CIRCUITRY
P6.0/WG1
P6.0/WG1
WG_OUT BUFFER
UPDATE WG_OUT
OUTPUT CONTROL
WG_CON BUFFER
WG_PROTECT PROTECTION CIRCUITRY
OUTPUT DISABLE
WG_OUT
WG_COMP BUFFER
WG_COMP UPDATE WG_COMP
MODE CONTROL SIGNALS AND DEAD TIME
WG_COUNT
LD
LD
CONTROL
EXTINCT INTERRUPT VECTOR
EXTINT INPUT PIN

Optimisation du fonctionnement du moteur asynchrone
103
Figure7: A/D block diagramme 5.5-GENERATION DU SIGNAUX PWM
Le microcontrôleur est utilisé pour la génération des signaux de commande MLI de l’onduleur. Les créneaux du signal MLI sont obtenus par l’intersection par intersection de la porteuse de haute fréquence et l’onde de référence modulatrice (un signal sinusoïdal de basse fréquence) comme représenté sur la figure 8. La fréquence de la tension de sortie est la même que la fréquence de l’onde sinus, et la tension de sortie proportionnelle à son amplitude. Le générateur des signaux de EV80C196MCS microcontrôleur permet la génération de trois paires complémentaires indépendantes de MLI.
Comme représenté sur le figure 6, le registre à 16 bits WG_RELOAD représente la valeur maximum qui atteignent un compteur comptant en haut et en bas entre 1 et cette valeur avec une vitesse constante. La valeur courante du compteur est WG_COUNT, qui constamment est intérieurement comparé avec les valeurs WG_COMP1, WG_COMP2 et WG_COMP3 registres images des données des valeurs instantanées de tension pour chacune des trois phases.
Le résultat binaire des comparaisons est trouvé a la sortie aussi bien que sa valeur complémentaire.
VREF A
NA
LOG
INPU
TS
ANGND
START CONVERSION
HSO COMMAND ‘’F’’
CHANNEL GO
AD
_CO
MM
AN
D
SAMPLE AND
HOLD
8 TO 1 ANALOG
MULTIPLEXER
BUSY
RES
ULT
AD
_RES
ULT
_HI
A
D_R
ESU
LT_L
O
SUCCESSIVE APPROXIMATION
A/D CONVERTER
CONTROL LOGIC
7 6 5 4 3 2 1
7 6 3 2 1 0
3 2 1
0

Optimisation du fonctionnement du moteur asynchrone
104
La formule pour le calcul de la période de porteur est comme suit
XTALc F
RELOADWGT _.4=
où WG_RELOAD= 16 –bit value FXTAL=processor clock frequency on MHz Tc = carrier period in µs
Le MLI est généré sur le périphérique de générateur des signaux(WFG) selon un programme développé on le langage C pour cette tâche voir l'annexe.
5.5.1-TEMPS-MORT
Le temps mort est défini comme le temps pendant lequel les deux les transistors du bras supérieur et inférieur sont bloqué, comme représenter sur la figure 9. Le temps mort est mis en application de protéger le module de transistor de puissance contre le courant quand les deux transistors d'une phase sont mis en marche.
2. XTALFTeadVALUEDT =−
where DT-VALUE= the 10 bit value loaded into WG_CON
TDEAD = dead-time in µs.
Figure 8: 3 phase MLI
Carrier Frequency Modulating waveform
120° phase In from
each other
VDC
VDC
VDC
120° U
V
w
120°

Optimisation du fonctionnement du moteur asynchrone
105
FXTAL= clock input frequency, MHz
Figure 9: temp mort
5.5.2 TABLEAU DES DONNEES
La forme d'onde de modulation qui peut être employée par le programme principal afin pour être comparée à la fréquence porteuse a appelé un sinus recherche la table contient 1500 mots que des entrées est produites par un programme appelé SIN[i]. Cette table est stockée dans une mémoire ROM et intégrée comme fichier standard de C dans le programme.
L'organigramme de la commande de programme générale de l’onduleur r- moteur asynchrone est montré sur la figure10.
5.6- CIRCUIT D’INTERFACE
Le circuit d'interface est réalisé avec le photocoupleur HCPL2730 et le conducteur de ligne différentiel quadruple MC3487. Le but de l'utilisation du conducteur MC3487 est de transformer les six sorties des signaux du microcontrôleur relativement à la masse à des signaux différentiels. En fait, de cette façon chaque signal est séparé de la masse et les autres signaux. Ceci assure la protection au bruit nécessaire pour le transport des signaux par l'intermédiaire d'un connecteur. Le transport avec des fils pour de longue distance affaiblit les signaux; leur amplitude diminue. Par conséquent, ces drivers amplifient nos signaux. Pour éviter la réaction courante de la partie puissance sur la partie commande, l'isolation galvanique entre les deux parties est réalisée avec le photocoupleur HCPL2730 voir annexe A.

Optimisation du fonctionnement du moteur asynchrone
106
Figure10: organigramme du programme de la commande du moteur asynchrone. 5.7- RESULTATS EXPERIMENTAUX
Les essais faite au niveau du laboratoire sur le système réalisé ont montré le bon fonctionnement des sous-ensembles tels que l’onduleur et la technique de commande du moteur. Les essais sont intervenus sur le coeur de la commande de système qui régit l’onduleur et le moteur asynchrone. Ceci est fait avec l'exécution du programme développé sur EV80C196 MC microcontrôleur évaluation Board. On peut observer le programme courant mis en application sur EV80C196MC microcontrôleur évaluation Board sur l'écran de PC montré sur les figures 11a, 11b et 1ç. Comme en peut observé la valeur des registres wg_comp1, wg_comp2 et wg_comp3 changements de tel sorte de produire les signaux MLI appliqués au gâtes des transistor de l’onduleur.
Programme principal
Initialisation des variables
Autorisation de l’ iT
Acquisition consigne de fréquence
Acquisition pentes d’accélération
Limitation de l’échelon de fréquence
Calcul de l’increment du tableau
Routine d’interruption
Calcul la consigne d’amplitude
(rapport V/f constant)
Calcul de WG-COMP1
Calcul de WG_COMP2
Calcul de WG_COMP3

Optimisation du fonctionnement du moteur asynchrone
107
La figure12 montre la forme d’onde MLI de la tension de sortie de l’onduleur qu’alimentant le moteur asynchrone, il est claire de la figure que l’onduleur fonctionne correctement.
La figure13 montre le courant de ligne du moteur asynchrone alimenté à partir de l’onduleur MLI, de la figure on peut dire que le courant du moteur est sinusoïdal.
a

Optimisation du fonctionnement du moteur asynchrone
108
b
c
figure11: Shows the running program on the EV80C196MCMicrocontroller Evaluation Board

Optimisation du fonctionnement du moteur asynchrone
109
Figure 12 : Tension composé aux bornes du moteur asynchrone
Figure13: courant de phase du moteur asynchrone
Figure : 14 Le système réalisé
INVERTER
MPPT
MICROCONTROLLER

Optimisation du fonctionnement du moteur asynchrone
110
5.8-CONCLUSION
In this chapter the optimization of the induction motor is based on the control technique voltage to frequency ration constant i.e the induction motor operate at constant flux. This control technique is achieved by the realization of the intelligent power model inverter which control the induction motor operation. The inverter output voltages are obtained by the algorithm implemented on the EV80C196MC Microcontroller Evaluation Board that generates the switching pattern signals of the inverter. In addition to the inverter control, the EV80C196MC Microcontroller Evaluation Board controls the MPPT.
In figure 11(a), (b), (c) we can see clearly the variation of the values of the registers wg_comp1, wg_comp2 and wg_comp3 corresponding to the inverter output voltages. Given that the inverter is controlled with a sinusoidal PMW technique and the inverter controls the induction motor. Consequently, the voltage applied to the induction motor terminals is a sinusoidal PWM as shown in figure 12. The induction motor line current is shown in figure13.The line current is sinusoidal which indicate that the algorithm implemented on the microcontroller generate the correct inverter switching signals.

Optimisation du fonctionnement du moteur asynchrone
111
5.9-REFERENCES [1].Barlow, R and A. Derrick. Solar Pumping An Introduction and Update on the technology, Performance Costs and Economics. World Bank Technical Paper Number 168.London: Intermediate technology Publication, 1993 [2] B. Lee and M. Ehsani, Advanced simulation model for brushless dc motor drives, Electric Power Compon. Syst 31 (2003), pp. 841–868. [3] Hindmarsch J. Electrical machine and their applications, 4th ed. New York: Pergamon press; 1984. [4] Bose B.K .Power electronics and AC Drives. Prentice-Hall; 1987. [5] Leonhard w. Control of electrical drives. Berlin: Springer; 1990. [6] Dubey G.K. Fundamentals of electrical drives. Narosa Publishing House; 1995. [7] Hindmarsch J. Electrical machine and drives, worked examples, 2nd ed . New York: Pergamon press; 1985. [8] Abdel-Karim, D.(2005) Solar Powered Induction motor-driven Water Pump operating on a desert Well, simulation and field tests, Renewable Energy, pp701-714. [9] Duzat, R. (2000) Analytic and experimental investigation of a photovoltaic pumping system, PhD- work, Oldenburg University Dissertation. [10] S.Sirisukprasert, ‘Optimized harmonic stepped- waveform for multilevel inverter ‘ Master Thesis,Virginia University, 1999. [11] H.Iwamoto,E.Motto, J.Achhammer, M.Iwaasaki “New intelligent power module for appliance motor control”, Proc .of 2000 PCIM Europe. [12] S.Noda, S, Yamada, G, Majumdar “ A Novel Supper Contact Intelligent Power Module”, proc. Of 1997 PCIM Europe, Numberg, Germany, Power ConversionVol1, pp.1-10. [13] Mitsubishi Intelligent Power Module, Data sheets. [14] Intel User’s manual. EV80C196MC Microcontroller Evaluation Board. 1992 [15] Gary Harris ‘Embedded control application note, AP-483’ 1993. [16] Arrouf. M ‘Optimisation of photovoltaic pumping system controlled by EV 80C196MCS Microcontroller Evaluation Board’, JAAUBAS N°4 .pp192-2001.2007

Conclusion
112
CONCLUSION
La demande mondiale en énergie évolue rapidement et les ressources naturelles de
l'énergie telles que l'uranium, le gaz et le pétrole diminuent en raison d'une grande diffusion et
développement de l'industrie ces dernières années. Pour couvrir les besoins en énergie, des
recherches sont conduits à l'énergie renouvelable. Une des énergies renouvelables qui peut
accomplir la demande du monde jusqu'à maintenant, est l’énergie solaire, qui est libre et
abondante dans la plupart des régions du monde, et est avéré une source économique.
L'utilisation d'énergie solaire comme source alternative d'énergie, souffre du coût élevé des
cellules solaires, du faible rendement et de puissance intermittent selon la fluctuation des
conditions atmosphériques. Par conséquent, n'importe quelle conception de système
d'application d'énergie solaire, devrait prendre en compte ces inconvénients. Cette thèse est
une contribution à l'optimisation de l'ensemble composé de: l'onduleur, le moteur et la pompe
qui sont reliés à un générateur solaire.
Cette étude couvre, en détail, les caractéristiques du générateur photovoltaïque et de
ses applications dans un secteur rural tel que les systèmes autonomes ou dans la ville comme
dans le cas des systèmes connectés au réseau. Plusieurs techniques d'algorithme
d'optimisation du générateur solaire, ont été étudiées. La perturbation et l'observation (P&o),
et les méthodes par incrémentation de conductance, sont généralement utilisées par les
concepteurs de suiveur de point de puissance maximum (MPPT), mais les deux méthodes
souffrent de quelques inconvénients, du point de vue de l'exécution ou dans le processus de
poursuite.
En outre, la modélisation et la simulation de différents sous-ensembles de l'ensemble composé
de: l'onduleur, le moteur asynchrone et la pompe branché sur un générateur photovoltaïque,
dans l'environnement de programmation de Matlab / Simulink ont été développées. Les
résultats de simulation ont montré l'évolution de tous les paramètres de chaque sous-ensemble
aussi bien que le système entier. En outre, les courbes obtenues sur les figures 9, 12 et 15 du
chapitre 5, sont semblables aux résultats obtenus par la référence [6].
La technique Hill Climbing de poursuite du point de puissance maximum proposée,
est conçue et mise en application sur la base du EV80C196MCS microcontrôleur d'évaluation

Conclusion
113
board. Les essais subis sur (MPPT) réalisé au niveau de laboratoire, ont montré la
performance de l'algorithme proposé du processus de poursuite et de la maximisation de la
puissance de sortie de l'énergie solaire de générateur jusqu' à 40% comparé au générateur
solaire directement utilisé.
L’onduleur triphasé représente un sous-ensemble important pour entrainer le moteur
asynchrone alimenté par un générateur photovoltaïque. L'onduleur réalisé est basé sur la
matrice IGBT's de puissance, régi par d'EV80C196MCS microcontrôleur évaluation board.
Plusieurs techniques des commandes de l'onduleur existent dans la littérature pour la
commande d'onduleur. Pour l'optimisation de l'onduleur conçu et réalisé, une technique MLI
sinusoïdale est adoptée puisqu'elle n'est pas difficile a mettre en application. L'onduleur
réalisé est testé au niveau de laboratoire, le fonctionnement robuste et efficacité a été observée
dans toutes expériences.
L'optimisation du moteur à induction est basée sur la technique de conduite utilisée.
Différents auteurs dans la littérature du moteur à induction ont proposé plusieurs techniques
conduisant, chaque méthode est utile pour une application spécifique. Dans l'armature de ce
travail, une tension constante au rapport de fréquence conduisant la technique de commande
est adoptée, puisque la charge de moteur n'exige pas un couple et une vitesse d’entré
spécifiques. La tension constante au rapport de fréquence (V/f = constante) conduisant la
méthode est mise en application sur le comité d'évaluation de microcontrôleur. Les essais
réalisés au niveau de laboratoire ont prouvé que le moteur à induction fonctionne selon la
technique de commande mise en application.
L’EV80C196 microcontrôleur évaluation board est une machine à 16 bits qui a sur
périphérique un générateur (WFG) et un port MLI. La machine peut être programmée en
assembleur ou en langue " C ". Dans de ce travail, un programme qui gouverne le point de
puissance maximum, c.-à-d. l'optimisation du générateur solaire et de la commande du moteur
asynchrone à travers l'onduleur est développé en " C " et mis en application sur le
microcontrôleur.

ملخض
منابع الطاقة الطبيعية في العالم مئل اليورانيوم ، الفحم، البترول و الغاز آميتها وزالعالم وخاصة الدول المتقدم صناعيا منها طلباتها متزايدة مع مر. محدودة الى حد اآلن
من بينها أصبح محل أهتمام العالم و المتجددة الطاقات أستعمالالسنبن لذلك فان البحث عن .الطاقة اشمسية
نظرا للتطور السريع في إنتاج الصفائح الشمسية وانخفاض سعرها، ونظرا للتقدم في التحكم اإللكتروني في الكترونيك القدرة، تضاعف االهتمام بتطبيقات الطاقة الشمسية
خصائضمن. توزيع الطافة شبكة أو تغذية وخاصة استعمالها لضخ المياه في المناطق النائية غير خطية ألن الطاقة المنتجة تتأثر بالعوامل الطبيعية مثل حدة أنهامولدات الطاقة الشمسية
. ودرجة الحرارة اإلشعاع
ة دم جمل ذا البحث يق ات ه ي تطبيق تعمال ف سية لالس ة الشم لالطاق ي مث اه ف ضخ المية مال شغيل مكيف هوائى أو ناطق النائي ة حتى ت ا تغيرت العوامل الطبيعي ة تتكون . مهم الجمل
ن تغالل الطا:م از الس ا جه ن أن ينتجه ي يمك صوى الت ة الق دق ةمول سي الطاق ول ة الشم ، محشغل مضخة يك القدرة لكترونإ ائي ي ة أو مكيف هوائى للتيار الكهربائي، محرك آهرب ،الجمل
وفر األقصى يتحكم فيها حاسوب خاص من أجل استعمال ة المت ا .ةللطاق ك قمن من أجل ذل . بالمخبر بجامعة باتنة تصميم وانجاز الجملة المذآورةبدراسة ،
ة ات المفتاحي در : الكلم ك الق وترمحول الكتروني د ة للت ائي، مضخة ، مول ، محرك آهرب .آهروضوئي

ABSTRACT
As conventional energy sources are decreasing fast with a consequent rise in cost, considerable attention is being paid to other alternative sources. Solar energy which is free and abundant in most parts of the world has proven to be an economical source of energy in many applications. The energy the earth receives from the sun is so enormous and so lasting that the total energy consumed annually by the entire world is supplied in as short time as a half hour. On a clear day the sun’s radiation on the earth can be 3000 watts per square meter depending on the location. The sun is a clean and renewable energy source, which produces neither green- house effect gas nor toxic waste through its utilization.
Photovoltaic is a technology in which radiant energy from the sun is converted to direct current electricity. The process is completely solid state and self contained. There are no moving parts and no materials are consumed or emitted. Although the scientific basis of the photovoltaic effect has been known for nearly 150 years, the modern photovoltaic cell was not developed until 1954. Unfortunately solar cells are still far to produce a significant fraction of the world’s energy needs because of the initial investment cost. However, per watt of peak power price considerably decreasing since the seventies. This leads to a wide application of photovoltaic systems in several promising area. Algeria is one of the developing countries where PV systems are implemented for several applications in the mountains and in the Sahara for lighting and water pumping and other applications. Algeria is geographically well located, with respect to the incident solar radiation. At a receiving horizontal plan, high daily average global insolations, which vary between 5 to7 KWh /m2 is received. Besides, the dispersion of some Algerian population over many mountains and remote sites encourages the use of solar energy. Batna zone is one of the zones, which is concerned for solar applications especially in water pumping used for the irrigation of agriculture area between 0.5 to 2ha.
The present work deals with the optimization of the set: inverter, induction motor and pump supplied by photovoltaic generator. Since the fast growth of semi- conductor and digital technologies, mainly in power electronics devices and control, can improve slightly the photovoltaic cells efficiency and bring down the cost of photovoltaic systems. The optimization is based on:
-The design and realization of the maximum power point in order to extract the maximum power from the photovoltaic generator for all atmospheric variations (insolation and temperature).
-The design and realization of an efficient and reliable inverter. -The realization of uncomplicated and efficient control technique of the induction
motor loaded with a centrifugal pump. The obtained practical results show that the efficiency of the realized MPPT reaches
94% and can provide 40% more energy to the load from the solar generator. Moreover, the

program developed for constant voltage/ frequency ratio control technique implemented on the EV80C196KC Microcontroller Evaluation Board is operating properly as observed on the inverter output voltage applied to the induction motor.




ANNEXE : A