-
Universit de Tunis
cole Suprieure des Sciences et Techniques de Tunis
THSE
Prsente en vue de l'obtention du
DIPLME DE DOCTORAT
en Gnie lectrique
Par
Habib HAMDI
Matrise en Gnie lectrique
Mastre en Automatique - Productique
Approche Multi-Modle
pour l'Observation d'tat et le Diagnostic
des Systmes Singuliers non Linaires
Soutenue le 24 Novembre 2012 devant le jury d'examen compos de
:
M. Farhat FNAIECH Professeur l'ESSTT Prsident
M. Nabil DERBEL Professeur l'ENIS Rapporteur
M. Fayel BEN HMIDA Matre de Confrences l'ESSTT Rapporteur
M. Mickael RODRIGUES Matre de Confrences UCBL-Lyon1
Examinateur
M. Naceur BENHADJ BRAIEK Professeur l'ESSTT Directeur de
thse
The`se preparee au Laboratoire des Syste`mes Avances - LSA a`
lEcole Polytechnique de Tunisie
tel-0
0757
821,
ver
sion
1 - 2
7 No
v 20
12
-
i mes parents, mes frres et ma sur.
tel-0
0757
821,
ver
sion
1 - 2
7 No
v 20
12
-
ii
tel-0
0757
821,
ver
sion
1 - 2
7 No
v 20
12
-
Avant Propos
Ce travail a t ralis au sein de Laboratoire des systmes avancs
(LSA) de l'cole
Polytechnique de Tunisie.
Je tiens d'abord remercier Monsieur Naceur Benhadj Braiek,
Professeur l'cole
Suprieure des Sciences et Techniques de Tunis et Directeur du
LSA l'cole Polytech-
nique de Tunisie pour m'avoir accueilli au sein de son quipe et
pour avoir accept de
diriger ma thse. Son soutien, ses conseils clairs et son aide
m'ont t d'un grand ap-
port pour la concrtisation de ce travail. Qu'il trouve ici le
tmoignage de ma profonde
gratitude.
Je voudrais remercier galement Monsieur Michael Rodrigues, Matre
de Confrences
au Laboratoire d'Automatique et Gnie des Procds (LAGEP) de
l'Universit de Claude
Bernard Lyon pour l'intrt qu'il a port notre travail de thse et
sa contribution ma-
nifeste son succs. Ses conseils scientiques et son aide prcieuse
m'ont t d'un grand
apport. Je lui exprime ma reconnaissance et je le remercie
d'avoir accept de faire partie
du jury de ma soutenance.
Je tiens aussi remercier vivement Monsieur Chokri Mechmeche,
Maitre Assistant
l'cole Suprieure des Sciences et Techniques de Tunis (ESSTT) et
membre du Labora-
toire LSA pour l'aide qu'il m'a apporte et les conseils qu'il ma
prodigus.
Je tiens exprimer mes remerciements les plus sincres Monsieur
Farhat Fnaiech,
Professeur l'cole Suprieure des Sciences et Techniques de Tunis
(ESSTT) pour l'hon-
neur qu'il m'a fait en acceptant de prsider le jury de ma
soutenance.
Monsieur Nabil Derbel, Professeur l'Ecole Nationale d'Ingnieurs
de Sfax (ENIS),
m'a honor en acceptant d'valuer mon travail de thse et d'en tre
le rapporteur. Qu'il
trouve ici l'expression de mes remerciements les plus vifs.
J'adresse mes remerciement les plus sincres Monsieur Fayel Ben
Hmida, Matre
de Confrences l'cole Suprieure des Sciences et Techniques de
Tunis (ESSTT) pour
l'intrt qu'il a bien voulu porter mon travail, en acceptant d'en
tre le rapporteur.
Je tiens rendre hommage l'esprit d'quipe qui rgne au laboratoire
LSA et ex-
primer tous ses membres ainsi qu' tous ceux qui ont contribu de
prs ou de loin
l'laboration de ce travail mes remerciements les plus vifs.
iii
tel-0
0757
821,
ver
sion
1 - 2
7 No
v 20
12
-
iv Avant Propos
tel-0
0757
821,
ver
sion
1 - 2
7 No
v 20
12
-
Table des matires
Avant Propos iii
Notations xi
Introduction gnrale 1
Chapitre 1
Sur la reprsentation et l'analyse des systmes singuliers
1.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . 9
1.2 Dnition d'un systme singulier . . . . . . . . . . . . . . .
. . . . . . . . 10
1.3 Exemples de systmes singuliers . . . . . . . . . . . . . . .
. . . . . . . . . 11
1.3.1 Problmes des Contraintes Variationnelles . . . . . . . . .
. . . . . 11
1.3.2 Systmes dynamiques singuliers de Leontief . . . . . . . .
. . . . . 12
1.3.3 Robot manipulateur trois bras : Skywash . . . . . . . . .
. . . . . 12
1.3.3.1 Description du systme : . . . . . . . . . . . . . . . .
. . . 12
1.3.3.2 Modlisation du systme : . . . . . . . . . . . . . . . .
. . 13
1.4 Les systmes singuliers linaires . . . . . . . . . . . . . .
. . . . . . . . . . 16
1.4.1 Rgularit et Impulsivit des systmes singuliers linaires . .
. . . . 17
1.4.2 Equivalence entre systmes singuliers . . . . . . . . . . .
. . . . . . 18
1.4.2.1 Forme quivalente par dcomposition de
Kronecker-Weierstrass 18
1.4.2.2 Forme quivalente par dcomposition en valeurs singulires
19
1.4.3 Rponse temporelle . . . . . . . . . . . . . . . . . . . .
. . . . . . . 20
1.4.3.1 Rponse temporelle du sous-systme lent . . . . . . . . .
. 20
1.4.3.2 Rponse temporelle du sous-systme rapide . . . . . . . .
20
1.4.4 Stabilit des systmes singuliers linaires . . . . . . . . .
. . . . . . 22
1.4.5 Admissibilit des systmes singuliers linaires . . . . . . .
. . . . . 23
1.4.6 tat atteignable . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . 23
v
tel-0
0757
821,
ver
sion
1 - 2
7 No
v 20
12
-
vi Table des matires
1.4.7 Observabilit des systmes singuliers . . . . . . . . . . .
. . . . . . 24
1.4.8 Dtectabilit des systmes singuliers . . . . . . . . . . . .
. . . . . 27
1.5 Systme singulier linaire paramtres variants (LPV) . . . . .
. . . . . . 29
1.5.1 Reprsentation des systmes singuliers (LPV) . . . . . . . .
. . . . 29
1.5.1.1 Systme singulier (LPV) ane . . . . . . . . . . . . . . .
30
1.5.1.2 Systme singulier (LPV) polytopique . . . . . . . . . . .
. 30
1.5.1.3 Reprsentation linaire fractionnaire (LFR) . . . . . . .
. 31
1.6 Systme singulier non linaire . . . . . . . . . . . . . . . .
. . . . . . . . . 31
1.6.1 Solvabilit des systmes singuliers . . . . . . . . . . . .
. . . . . . . 31
1.6.2 Indice des systmes singuliers . . . . . . . . . . . . . .
. . . . . . . 32
1.6.2.1 Indice de direntiation . . . . . . . . . . . . . . . . .
. . 32
1.6.2.2 Exemple 1 (Indice 1) . . . . . . . . . . . . . . . . . .
. . . 32
1.6.2.3 Exemple 2 (Indice 2) . . . . . . . . . . . . . . . . . .
. . . 33
1.6.2.4 Indice de perturbation . . . . . . . . . . . . . . . . .
. . . 34
1.6.3 Rduction d'indice . . . . . . . . . . . . . . . . . . . .
. . . . . . . 34
1.6.4 Application : Rduction d'indice du modle singulier qui
dcrit un
Pendule . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . 35
1.7 Stabilit des systmes singuliers . . . . . . . . . . . . . .
. . . . . . . . . . 36
1.7.1 Stabilit aux sens de Lyapunov . . . . . . . . . . . . . .
. . . . . . 36
1.8 Observabilit des systmes singuliers non linaires . . . . . .
. . . . . . . . 37
1.9 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . 39
Chapitre 2
Modlisation et observation d'tat multi-modles des systmes
singuliers
2.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . 43
2.2 Modlisation par approche multi-modle . . . . . . . . . . . .
. . . . . . . 44
2.2.1 Zone de fonctionnement . . . . . . . . . . . . . . . . . .
. . . . . . 45
2.2.2 Variable de dcision . . . . . . . . . . . . . . . . . . .
. . . . . . . . 46
2.2.3 Fonction d'activation . . . . . . . . . . . . . . . . . .
. . . . . . . . 46
2.2.4 Structures multi-modle . . . . . . . . . . . . . . . . . .
. . . . . . 46
2.2.4.1 Structure couple . . . . . . . . . . . . . . . . . . . .
. . . 47
2.2.4.2 Structure dcouple . . . . . . . . . . . . . . . . . . .
. . 47
2.3 Modle singulier ou de type Takagi-Sugeno . . . . . . . . . .
. . . . . . . 48
2.4 Mthodes d'obtention des multi-modles pour les systmes
singuliers . . . . 50
2.4.1 Obtention des multi-modles par linarisation . . . . . . .
. . . . . 50
tel-0
0757
821,
ver
sion
1 - 2
7 No
v 20
12
-
vii
2.4.2 Obtention des multi-modles par la mthode de transformation
des
non linarits . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . 51
2.4.3 Exemple illustratif : Disque roulant . . . . . . . . . . .
. . . . . . . 53
2.5 Reprsentation polytopique des systmes singuliers linaires
paramtres
variants . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . 57
2.6 Stabilit des systmes multi-modles . . . . . . . . . . . . .
. . . . . . . . 59
2.6.1 Stabilit quadratique . . . . . . . . . . . . . . . . . . .
. . . . . . . 59
2.6.2 Stabilit relaxe . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . 60
2.7 Estimation d'tat des multi-modles singuliers . . . . . . . .
. . . . . . . . 60
2.7.1 Observateur multi-modle Proportionnel entres inconnues . .
. . 61
2.7.1.1 Structure du multi-observateur . . . . . . . . . . . . .
. . 62
2.7.1.2 Conditions d'existence du multi-observateur . . . . . .
. . 64
2.7.1.3 Procdure de synthse du multi-observateur . . . . . . . .
64
2.7.2 Estimation des entres inconnues . . . . . . . . . . . . .
. . . . . . 67
2.7.3 Multi-Observateur Proportionnel Intgral entres inconnues .
. . 67
2.7.3.1 Synthse du multi-observateur PI . . . . . . . . . . . .
. . 68
2.7.3.2 Dtermination du multi-observateur PI . . . . . . . . . .
. 70
2.7.4 Exemple illustratif : Estimation des tats du disque
roulant . . . . . 71
2.7.4.1 Dtermination des paramtres du multi-observateur Pro-
portionnel entres inconnues . . . . . . . . . . . . . . . .
71
2.7.4.2 Dtermination des paramtres du multi-observateur PI . .
71
2.7.4.3 Comparison des performances des deux multi-observateurs
72
2.7.4.4 Estimation des entres inconnues . . . . . . . . . . . .
. . 74
2.8 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . 74
Chapitre 3
Approche multi-modle pour le diagnostic des systmes
singuliers
3.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . 79
3.2 Terminologies et critres de performance relatifs un systme
de diagnostic 80
3.2.1 Les terminologies de diagnostic . . . . . . . . . . . . .
. . . . . . . 80
3.2.2 Critres de performance d'un systme de diagnostic . . . . .
. . . . 81
3.3 Principe du diagnostic base de modles . . . . . . . . . . .
. . . . . . . . 81
3.3.1 Systme multi-modle singulier avec dfauts . . . . . . . . .
. . . . 82
3.3.1.1 Systme multi-modle singulier avec dfauts actionneurs .
82
3.3.1.2 Systme multi-modle singulier avec dfauts capteurs . . .
83
tel-0
0757
821,
ver
sion
1 - 2
7 No
v 20
12
-
viii Table des matires
3.3.1.3 Systme multi-modle singulier avec dfauts systme . . .
83
3.3.2 Localisation des dfauts . . . . . . . . . . . . . . . . .
. . . . . . . 84
3.3.2.1 Localisation des dfauts actionneurs . . . . . . . . . .
. . 85
3.3.2.2 Localisation des dfauts capteurs . . . . . . . . . . . .
. . 86
3.4 Dtection et localisation des dfauts des systmes singuliers
multi-modles 86
3.4.1 Gnration de rsidus par optimisation multi-objectifs . . .
. . . . . 87
3.4.1.1 Synthse du gnrateur de rsidus . . . . . . . . . . . . .
. 87
3.4.1.2 Formulation des ingalits matricielles linaires . . . . .
. 91
3.4.2 Gnration de rsidus base de multi-observateurs . . . . . .
. . . 92
3.4.2.1 Conditions de convergence . . . . . . . . . . . . . . .
. . . 93
3.4.2.2 Synthse du gnrateur de rsidus . . . . . . . . . . . . .
. 94
3.4.2.3 Analyse de la stabilit . . . . . . . . . . . . . . . . .
. . . 95
3.4.3 Application : Dtection et isolation des dfauts d'un robot
manipu-
lateur trois bras . . . . . . . . . . . . . . . . . . . . . . .
. . . . . 100
3.4.3.1 Modle du robot dans un systme de coordonnes cart-
siennes . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. 100
3.4.3.2 Reprsentation multi-modle . . . . . . . . . . . . . . .
. 102
3.4.3.3 Estimation des tats en prsence des dfauts . . . . . . .
. 105
3.4.3.4 Gnration des rsidus par banc de multi-observateurs . .
108
3.5 Mthodes d'estimation de dfauts . . . . . . . . . . . . . . .
. . . . . . . . 109
3.5.1 Estimation des dfauts par un multi-observateur tendu . . .
. . . . 110
3.5.2 Estimation des dfauts par un multi-observateur entres
inconnues 112
3.5.3 Application : Estimation des dfauts du robot manipulateur
. . . . 113
3.6 Dtection et estimation des dfauts des systmes singuliers LPV
. . . . . . 114
3.6.1 Structure polytopique des systmes singuliers paramtres
variants 114
3.6.2 Structure polytopique de l'observateur proportionnel
intgral . . . . 115
3.6.2.1 Synthse de l'OPIEI . . . . . . . . . . . . . . . . . . .
. . 116
3.6.2.2 Convergence exponentielle de l'observateur
proportionnel
intgral polytopique . . . . . . . . . . . . . . . . . . . . .
117
3.6.3 Dtection et isolation des dfauts pour les systmes
singuliers LPV 120
3.6.3.1 Gnration de rsidus par l'OPIEI polytopique . . . . . .
120
3.6.3.2 Localisation des dfauts actionneurs . . . . . . . . . .
. . 122
3.6.4 Exemple illustratif . . . . . . . . . . . . . . . . . . .
. . . . . . . . 123
3.6.4.1 Synthse de l'OPIEI polytopique . . . . . . . . . . . . .
. 124
tel-0
0757
821,
ver
sion
1 - 2
7 No
v 20
12
-
ix
3.6.4.2 Simulation . . . . . . . . . . . . . . . . . . . . . . .
. . . 125
3.6.4.3 Diagnostic des dfauts par l'OPIEI polytopique . . . . .
. 126
3.7 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . 129
Conclusion Gnrale et perspectives 131
Bibliographie 135
Publications personnelles sur les travaux de cette thse 147
tel-0
0757
821,
ver
sion
1 - 2
7 No
v 20
12
-
x Table des matires
tel-0
0757
821,
ver
sion
1 - 2
7 No
v 20
12
-
Notations
Les notations suivantes sont dnies au fur et a mesure de leur
utilisation dans le
prsent mmoire et sont conserves tout au long de celui-ci.
Matrices et vecteurs
M > 0 (M 0) Matrice M symtrique, dnie positive (resp.
symtrique, semi dnie positive)M < 0 (M 0) Matrice M symtrique,
dnie ngative (resp. symtrique, semi dnie ngative)In (I) Matrice
identit de dimension n (resp. de dimension approprie)MT Le
Transpose de la matrice MM1 L'Inverse de la matrice MM+ Le Pseudo
inverse de la matrice MkMk Norme euclidienne de la matrice Mkxk
Norme euclidienne du vecteur x
Ensembles
R Ensemble des nombres relsR+ Ensemble des nombres rels
positifsRn Espace rel euclidien de dimension nRnn L'ensemble de
toute les matrices de dimension n nC Ensemble des nombres
complexesdet(M) Dterminant de la matrice Mdim(M) Dimension de la
matrice Mrang(M) Rang de la matrice Mtr(M) trace de la matrice
Mmin(M) Valeur propre minimale de la matrice Mmax(M) Valeur propre
maximale de la matrice Mmin(M) Valeur singulire minimale de la
matrice Mmax(M) Valeur singulire maximale de la matrice M(M)? Le
complment orthogonal de la matrice MIm(M) Espace image de la
matrice MKer(M) Espace noyau de la matrice Mspan(M) Le sous-espace
engendr par les colonnes de la matrice M
Notations des relations et manipulations
=) Implique
xi
tel-0
0757
821,
ver
sion
1 - 2
7 No
v 20
12
-
xii Notations
2 Appartient Un sous espace de8 Choisie arbitrairement
Notations supplmentaires
diag(d1; d2; :::; dn) Matrice diagonale avec les lments (d1; d2;
:::; dn) sur la diagonale Fin d'un thorme Fin d'une dmonstration ou
d'une dnition
Acronyms
EAD Equation Algbro-DirentielleEDO Equation Direntielle
OrdinaireFDI Dtection et Isolation des DfautsLMI Ingalit
Matricielle LinaireLTI Linaire Temps InvariantLPV Linaire paramtre
variantPIO Observateur Proportionnel IntegralUIO Observateur Entres
Inconnues
tel-0
0757
821,
ver
sion
1 - 2
7 No
v 20
12
-
Introduction gnrale
La recherche sur les systmes dynamiques exige souvent une
modlisation mathma-
tique du comportement du systme. La complexit croissante de ces
processus conduisent
alors, au dveloppement des programmes machine produisant des
systmes d'quations,
tels que les systmes multi-corps, ou une dcomposition du
processus global, telle que les
systmes interconnects. Le comportement dynamique de chaque
sous-modle est rgi par
des quations direntielles. L'accouplement de ces sous-modles se
fait par des quations
algbriques. En eet, le modle mathmatique est reprsent par des
relations dynamiques,
ainsi que des relations statiques. Cette augmentation permet de
conserver aux variables
d'tats leur signication physique ainsi que de modliser des
processus prsentant des
comportements impulsifs (des drives en entres et en sorties) et
plus gnralement les
systmes non causaux.
Une grande classe de systmes physiques peut tre modlise par des
Equations Algbro-
Direntielles (EADs). Le papier de Newcomb et al. [Newc 89] donne
plusieurs exemples
pratiques comprenant des rseaux lectriques, des robots
manipulateurs avec des contraintes,
des processus chimiques, etc. A titre d'exemple, dans le cas des
processus chimiques, les
quations direntielles rsultent des quilibres dynamiques de la
masse et de l'nergie,
alors que les quations algbriques rsultent des relations
d'quilibre thermique. Pour les
systmes mcaniques, les quations dynamiques sont dcrits par les
relations des mou-
vements, alors que les quations algbriques modlisent les
contraintes mcaniques. Tous
ces systmes et autres sont dcrits par des quations
algbro-direntielles (EADs) non-
linaires.
Selon le domaine d'tude, les systmes algbro-direntiels admettent
direntes nomen-
clatures dans dirents champs. Par exemple, les thoriciens de
commande et les ma-
thmaticiens les avaient longtemps appels les systmes singuliers
[Newc 89], puisque la
matrice sur la driv des variables d'tat est gnralement
singulire, ou parfois ils em-
ploient par terminologie les systmes d'espace l'tat gnraliss
[Dai 89]. D' autre part,
les systmes nomms descriptors sont employs frquemment dans les
systmes cono-
miques, puisqu'ils donnent une description normale du systme,
alors que les analystes
1
tel-0
0757
821,
ver
sion
1 - 2
7 No
v 20
12
-
2 Introduction gnrale
numriques appellent leurs descriptions des quations
algbro-direntielles [Mull 00], ou
des quations avec contraints algbriques. Dans le secteur des
circuits le nom originel tait
le pseudo-tat [Dai 89].
Il existe plusieurs raisons de considrer les systmes sous forme
algbro-direntielle
ou singulier, plutt qu'on essaie de les rcrire comme des systmes
ordinaires gouverns
seulement par des quations direntielles. En eet, pour simuler
des systmes physiques,
les quations algbro-direntielles (EADs) reprsentent un ensemble
de relations entre
des contraintes algbriques et certains drivs des variables
d'tat. Ces variables, ont une
signication physique. La transformation de ce type de modle en
un modle ordinaire peut
produire des variables d'tat moins signicatives. D'autre part,
l'utilisation des modles
ordinaires est trs utile, mais les variables d'tat prsentes ne
fournissent pas souvent
un sens physique [Marx 03], [Mull 00]. En outre, quelques
phnomnes physiques, comme
l'impulsion et l'hysteresis qui sont importants dans la thorie
des circuits, ne peuvent
tre traits correctement dans les modles ordinaires [Sjb 06]. La
reprsentation algbro-
direntielle fournit une manire approprie de traiter de tels
problmes. Cette reprsen-
tation est trs utilise dans la modlisation des processus
physiques [Boul 08], [Luen 77].
En fait, les modles algbro-direntiels semblent plus commodes que
les modles ordi-
naires dans la description des systmes grande chelle, des
systmes conomiques, des
rseaux lectriques, des systmes neuraux et autres.
L'analyse et la synthse des systmes singuliers ont fait l'objet
de plusieurs travaux
de recherche. De ce fait, une thorie d'existence et d'unicit
pour les quations algbro-
direntielles non linaires a t dveloppe par S:Reich [Reic 91] en
exploitant leurs
structure gomtrique direntielle. Rcemment, V enkatasubramanian
et al: [Venk 95]
ont tudi intensivement les rgions de faisabilit pour les systmes
algbro-direntiels.
La notion des rgions de faisabilit fournit un passage usuel la
thorie de la stabilit des
quations algbro-direntielles (EADs).
Cependant, la linarit des tudes constitue une hypothse forte qui
limite la perti-
nence des rsultats que l'on peut obtenir. L'extension directe
des mthodes de commande
et d'estimation dveloppes dans le contexte des modles linaires
au cas des modles
non linaires est dlicate. En revanche pour les systmes non
linaires sans contraintes
algbriques, des rsultats intressants ont t obtenus pour une
dmarche de modlisation
qui s'appuie sur l'utilisation d'une approche globale base sur
un ensemble de modles
tel-0
0757
821,
ver
sion
1 - 2
7 No
v 20
12
-
3de structures simples, chaque modle dcrit le comportement du
systme dans une zone
de fonctionnement particulire (dnie, par exemple, par les
valeurs des entres ou de
l'tat du systme). Cette approche, dite multi-modles, est une
reprsentation polytopique
convexe qui peut tre obtenue soit directement par une
transformation du modle math-
matique non linaire en un ensemble de modles anes en l'tat [Rodr
05'], [Kard 04],
[Chad 02] ou par linarisation autour de dirents points de
fonctionnement soit partir
de donnes sur les entres et les sorties. Cette approche a
produit des rsultats intressants
en commande, en observation et diagnostic pour les systmes non
linaires ordinaires.
Plusieurs catgories de multi-modles existent dans la littrature,
notamment les systmes
linaires paramtres variant dans le temps (LPV) [Zera 09] ou les
systmes quasi LPV,
appels encore systmes de Takagi-Sugeno (T-S) [Taka 85].
L'approche multi-modles pos-
sde une proprit d'approximation universelle des systmes anes en
la commande et
prsente l'avantage de pouvoir reprsenter de manire exacte un
modle de connaissance
non linaire sur un compact de l'espace d'tat. De ce fait, la
phase de modlisation est
donc essentielle pour un processus physique, mais n'est pas une
n en soi. La phase prin-
cipale pour un processus est de garantir une production en
quantit et en qualit. Pour
assurer cette production, il faut que toute anomalie de
fonctionnement soit rapidement
dtecte puis prise en compte dans la stratgie de conduite du
systme considr. Cette
anomalie peut avoir comme origine de dfauts de systmes, de
capteurs, d'organes de
commande (actionneurs), des bruits, ...
Le diagnostic, suscite depuis les annes 1970 un intrt croissant
tant au niveau du
monde industriel que de la recherche scientique. Parce que les
systmes industriels de-
viennent de plus en plus complexes et sophistiqus, il est
lgitime de leur associer un
module ecace de surveillance an d'accrotre leur abilit et leur
disponibilit, et d'am-
liorer la scurit du personnel. Les mthodes de diagnostic
reposent essentiellement sur la
connaissance d'un modle cens reprsenter le comportement du
systme physique sur-
veiller. Elles s'appuient sur la connaissance, entire ou
partielle, de l'tat d'un systme.
Ces tats sont fournis par un systme dynamique auxiliaire appel
observateur d'tat
(multi-observateur pour les systmes reprsents par des
multi-modles).
Dans ce mmoire, le thme propos concerne l'observation et le
diagnostic des systmes
gouverns par des quations algbro-direntielles non linaires
aectes par des dfauts
et des perturbations. La mthode propose consiste utiliser
l'approche multi-modles
comme outil d'approximation linaire de ce type de systmes. Cette
approche est base
sur l'utilisation d'un ensemble de modles structures simples ;
chaque modle dcrit le
tel-0
0757
821,
ver
sion
1 - 2
7 No
v 20
12
-
4 Introduction gnrale
comportement du systme dans une zone de fonctionnement
particulire. Dans ce mmoire
on a pu aussi tudier les systmes singuliers LPV polytopique.
Cette classe de systme
permet de reprsenter de manire exacte les modles non linaires
sur un compact de
l'espace d'tat. Le comportement dynamique du systme singulier
LPV est donn sous
une forme polytopique, qui permet de dcrire le systme originel
en tant que combinaison
convexe de sous-modles dnis par les sommets d'un polydre
convexe. Ces sous-modles
sont ensuite combins en utilisant des fonctions de pondration
convexes pour dcrire le
modle global.
Peu de travaux ont t publis concernant l'estimation des tats des
systmes singuliers
multi-modles. De plus, les travaux existants sont principalement
ddis l'estimation
d'tat des multi-modles variables de dcision mesurables,
c'est--dire des variables de
dcision lies aux entres ou aux sorties des systmes. Nanmoins,
dans beaucoup de si-
tuations, ces variables de prmisse sont dnies par les variables
d'tat qui peuvent ne
pas tre accessible la mesure. Ceci nous a conduit envisager
l'tude de la conception
d'observateurs pour les systmes singuliers dcrits par des
multi-modles variables de
prmisse mesurables et variables de prmisse non mesurables et
aects par des entres
inconnues. De mme, et dans le cadre d'amliorer la reconstruction
des tats et des en-
tres inconnues, nous envisageons d'utiliser l'observateur de
type proportionnel intgral
qui permet d'oprer une estimation simultane de l'tat et des
entres inconnues du sys-
tme.
Par ailleurs, nous nous proposons de considrer la problmatique
du diagnostic des sys-
tmes singuliers en utilisant le principe de gnrateurs de rsidus
base d'observateurs
entres inconnues pour le cas des systmes singuliers multi-modles
variables de pr-
misse mesurables et variables de prmisse non mesurables. Dans ce
cadre une approche
multi-modle de dtection et d'isolation des dfauts des systmes
singuliers non linaires
est dveloppe. Nous proposons aussi d'tendre cette approche de
diagnostic aux systmes
singuliers paramtres variants (LPV). L'observateur conu dans ce
sens comprend en
plus de l'action proportionnelle, une action intgrale pour
permettre d'estimer conjointe-
ment les grandeurs d'tat et les dfauts ventuels.
L'ensemble de nos contributions est synthtis dans ce mmoire
organis en trois cha-
pitres :
Le premier chapitre prsente un tat de l'art sur le sujet trait.
Il s'intresse in-
troduire la classe des systmes singuliers. Ces systmes
constituent un puissant outil de
tel-0
0757
821,
ver
sion
1 - 2
7 No
v 20
12
-
5modlisation dans la mesure o ils peuvent dcrire des processus
rgis la fois par des
quations dynamiques et des quations statiques. Ce formalisme est
ainsi particulirement
adapt l'tude des systmes interconnects, soumis des contraintes
physiques statiques
et prsentant des comportements impulsifs. Plusieurs rsultats
fondamentaux relatifs la
localisation et l'analyse des systmes singuliers linaires,
paramtres variants ou non
linaires sont ainsi rappels.
Le deuxime chapitre est consacr au problme d'approximation des
systmes singu-
liers paramtres variants et non linaires par une reprsentation
multi-modle. Cette
approche permet de prsenter un processus dynamique non linaire
comme une combi-
naison d'un ensemble de modles linaires ou anes valables dans
des zones de fonction-
nement. Les direntes structures les plus utilises (modles locaux
coupls et dcoupls)
sont dcrites. L'analyse de la stabilit des multi-modles a t
considre. Une mthode
de synthse de deux types d'observateurs pour les systmes
singuliers multi-modles et
LPV polytopique est aussi introduite.
Le problme de diagnostic des systmes singuliers non linaires par
approche multi-
modles et des systmes singuliers paramtres variants polytopiques
est abord dans le
troisime chapitre. Trois mthodes base d'observateurs sont alors
proposes. La premire
approche repose sur l'utilisation d'un multi-observateur entres
inconnues assurant un
dcouplage partiel de l'estimation des dfauts. La deuxime mthode
est inspire du pro-
blme standard de commande H1. Elle est base sur la minimisation
de l'inuence des
entres inconnues et la maximisation de l'inuence des dfauts sur
les rsidus, ce qui
revient l'tude d'un problme multiobjectifs. La troisime mthode
est base sur l'uti-
lisation d'un multi-observateur Proportionnel Intgral (PI).
Cette approche est utilise
avec les systmes singuliers paramtres variants. Elle permet
moyennant un banc de
gnrateurs de rsidus, de fournir directement une estimation des
dfauts et par suite leur
dtection et localisation.
tel-0
0757
821,
ver
sion
1 - 2
7 No
v 20
12
-
tel-0
0757
821,
ver
sion
1 - 2
7 No
v 20
12
-
Chapitre 1
Sur la reprsentation et l'analyse des
systmes singuliers
Sommaire
1.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . 9
1.2 Dnition d'un systme singulier . . . . . . . . . . . . . . .
. . 10
1.3 Exemples de systmes singuliers . . . . . . . . . . . . . . .
. . 11
1.3.1 Problmes des Contraintes Variationnelles . . . . . . . . .
. . . 11
1.3.2 Systmes dynamiques singuliers de Leontief . . . . . . . .
. . . 12
1.3.3 Robot manipulateur trois bras : Skywash . . . . . . . . .
. . 12
1.3.3.1 Description du systme : . . . . . . . . . . . . . . . .
12
1.3.3.2 Modlisation du systme : . . . . . . . . . . . . . . . .
13
1.4 Les systmes singuliers linaires . . . . . . . . . . . . . .
. . . . 16
1.4.1 Rgularit et Impulsivit des systmes singuliers linaires . .
. 17
1.4.2 Equivalence entre systmes singuliers . . . . . . . . . . .
. . . 18
1.4.2.1 Forme quivalente par dcomposition de Kronecker-
Weierstrass . . . . . . . . . . . . . . . . . . . . . . . .
18
1.4.2.2 Forme quivalente par dcomposition en valeurs singu-
lires . . . . . . . . . . . . . . . . . . . . . . . . . . .
19
1.4.3 Rponse temporelle . . . . . . . . . . . . . . . . . . . .
. . . . . 20
1.4.3.1 Rponse temporelle du sous-systme lent . . . . . . .
20
1.4.3.2 Rponse temporelle du sous-systme rapide . . . . . .
20
1.4.4 Stabilit des systmes singuliers linaires . . . . . . . . .
. . . . 22
1.4.5 Admissibilit des systmes singuliers linaires . . . . . . .
. . . 23
1.4.6 tat atteignable . . . . . . . . . . . . . . . . . . . . .
. . . . . 23
1.4.7 Observabilit des systmes singuliers . . . . . . . . . . .
. . . . 24
1.4.8 Dtectabilit des systmes singuliers . . . . . . . . . . . .
. . . 27
1.5 Systme singulier linaire paramtres variants (LPV) . . .
29
1.5.1 Reprsentation des systmes singuliers (LPV) . . . . . . . .
. . 29
1.5.1.1 Systme singulier (LPV) ane . . . . . . . . . . . . .
30
1.5.1.2 Systme singulier (LPV) polytopique . . . . . . . . .
30
7
tel-0
0757
821,
ver
sion
1 - 2
7 No
v 20
12
-
8 Chapitre 1. Sur la reprsentation et l'analyse des systmes
singuliers
1.5.1.3 Reprsentation linaire fractionnaire (LFR) . . . . . .
31
1.6 Systme singulier non linaire . . . . . . . . . . . . . . . .
. . . 31
1.6.1 Solvabilit des systmes singuliers . . . . . . . . . . . .
. . . . . 31
1.6.2 Indice des systmes singuliers . . . . . . . . . . . . . .
. . . . . 32
1.6.2.1 Indice de direntiation . . . . . . . . . . . . . . . . .
32
1.6.2.2 Exemple 1 (Indice 1) . . . . . . . . . . . . . . . . . .
. 32
1.6.2.3 Exemple 2 (Indice 2) . . . . . . . . . . . . . . . . . .
. 33
1.6.2.4 Indice de perturbation . . . . . . . . . . . . . . . . .
. 34
1.6.3 Rduction d'indice . . . . . . . . . . . . . . . . . . . .
. . . . . 34
1.6.4 Application : Rduction d'indice du modle singulier qui
dcrit
un Pendule . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . 35
1.7 Stabilit des systmes singuliers . . . . . . . . . . . . . .
. . . 36
1.7.1 Stabilit aux sens de Lyapunov . . . . . . . . . . . . . .
. . . . 36
1.8 Observabilit des systmes singuliers non linaires . . . . . .
37
1.9 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . 39
tel-0
0757
821,
ver
sion
1 - 2
7 No
v 20
12
-
1.1. Introduction 9
Les systmes singuliers ou algbro-direntiels surgissent dans une
varit d'applica-
tions. Par consquent leur analyse et traitement numrique jouent
un rle trs important
dans les mathmatiques modernes. Dans ce chapitre, nous
rcapitulons quelques dnitions
de base et des rsultats prliminaires qui seront employs
ultrieurement. Des exemples
de modles singuliers ou descriptors, sont considrs pour montrer
leur importance dans
la modlisation des problmes pratiques. Plusieurs concepts de
stabilit et d'observabilit
sont introduits.
1.1 Introduction
Les systmes singuliers dsigns galement sous le nom de systmes
algbro-direntiels,
implicites, descriptor systems ou singular systems (appellation
anglo-saxone) [Marx 03],
constituent une classe importante de systmes d'intrt thorique et
pratique. Ils sont utili-
ss dans la modlisation des systmes mcaniques, robotiques avec
des contraintes cinma-
tiques [Sjb 06], des rseaux lectriques [Kapr 92] et des
applications chimiques [Boul 08].
Ils peuvent tre considrs comme une gnralisation des systmes
dynamiques ordinaires.
L'tude des systmes algbro-direntiels a permis de nombreuses
recherches depuis le d-
but des annes 1970 car ce formalisme permet l'analyse et la
commande des systmes pour
lesquels la reprsentation d'tat usuelle n'est pas satisfaisante.
D'aprs Luenberger 1977
[Luen 77], les principales classes de systmes relevant de cette
approche sont les systmes
interconnects de grandes dimensions tels que les rseaux
lectriques ou hydrauliques, les
systmes rectangulaires, et les systmes non causaux. Depuis une
vingtaine d'annes, de
nombreux points de la thorie de la commande des systmes
dynamiques ont t tendus
aux systmes singuliers tels que le placement robuste de ples
[Xiao 97], la commande
optimale [Sjb 06],... ainsi que la synthse des observateurs
[Mull 99], [Daro 96], [Mull 93]
et la dtection des dfauts [Kim 01]. Le progrs dans l'tude des
systmes singuliers li-
naires et les avances dans l'analyse et la synthse des systmes
non-linaires ordinaires
[Benh 99], [Boua 06], ont stimul une activit de recherche
croissante sur la commande et
l'observation des systmes singuliers non linaires. cet gard,
plusieurs proprits telle
que l'existence et l'unicit des solutions, l'analyse de la
stabilit en utilisant des techniques
de Lyapunov [Tanig 00], la commandabilit [Joha 06] et
l'observabilit [Terr 01], ont t
tudies pour cette classe de systmes non linaires.
Dans ce chapitre, nous dnissons d'abord, l'origine des systmes
singuliers. Ensuite, nous
rappellerons quelques rsultats fondamentaux pour la classe
linaire de ces systmes ainsi
que les systmes singuliers paramtres variants. Nous prsenterons
par la suite la classe
tel-0
0757
821,
ver
sion
1 - 2
7 No
v 20
12
-
10 Chapitre 1. Sur la reprsentation et l'analyse des systmes
singuliers
gnrale des systmes singuliers non linaires sur lesquels nous
nous focaliserons, tout
en passant en revue les concepts de la solubilit, les notions
d'indice et de la rduction
d'indice. Les proprits de stabilit et d'observabilit des systmes
singuliers seront aussi
tudies.
1.2 Dnition d'un systme singulier
La description mathmatique d'un systme se dcompose souvent d'un
ensemble d'qua-
tions direntielles ou dynamiques, qui font intervenir des
variables agissant sur l'volution
du systme au cours du temps [Dai 89]. La forme gnrale du modle
mathmatique s'crit
alors, sous la forme suivante : F ( _x(t); x(t); u(t)) =
0G(x(t); u(t); y(t)) = 0(1.1)
avec x(t) 2 Rn le vecteur des variables d'tat du systme, u(t) 2
Rp l'entre de com-mande et y(t) 2 Rm le vecteur des sorties
mesurables. F et G sont deux fonctionsdirentiable de dimensions
appropries. Les quations (1.1) donnent une reprsentation
d'tat d'un systme dynamique non linaire. Une forme spciale des
galits (1.1) peut se
mettre sous la forme suivante :E _x(t) = f(x(t); u(t)); Ex(0) 2
ImEy(t) = g(x(t); u(t)); t 0 (1.2)
E =
Ir 00 0
est une matrice singulire et x =
xT1 x
T2
T = (x1; ::::; xn)
Test le vec-
teur d'tat de dimension n 1. Ce vecteur d'tat est dvis en une
partie dynamique etune partie statique. Le modle dcrit par (1.2)
reprsente la forme gnrale d'un systme
singulier non linaire.
Les systmes singuliers sont capables de dcrire les comportements
des systmes qui ne
peuvent pas tre expliciter par les systmes ordinaires (les
systmes gouverns seulement
par des quations direntielles). En outre, il y a plusieurs
raisons de modliser les pro-
cessus physiques sous la forme dnie par (1.2), que de les dcrire
seulement par des
quations direntielles ordinaires (EDO). En eet, lors de la
simulation des processus
physiques, le modle est souvent rgi par des quations
direntielles faisant intervenir
les variations des variables au cours du temps et des relations
algbriques exprimant les
relations entre les variables d'tat. Cette reprsentation donne
une signication physique
[Fang 93] ces variables d'tat.
Au-del-de a, plusieurs phnomnes physiques, comme les impulsions
et les hysteresis
qui sont importants dans la thorie des circuits, ne peuvent pas
tre traits correctement
tel-0
0757
821,
ver
sion
1 - 2
7 No
v 20
12
-
1.3. Exemples de systmes singuliers 11
dans les modles ordinaires. La reprsentation algbro-direntielle
fournit une manire
approprie pour traiter de tels problmes [Lewi 86].
1.3 Exemples de systmes singuliers
La modlisation par des quations algbro-direntielles joue un rle
essentiel, entre
autre, pour les circuits lectriques, les systmes mcaniques avec
contraintes et les proces-
sus conomiques. Dans cette section, nous donnerons des exemples
de processus dcrits
par des modles singuliers.
1.3.1 Problmes des Contraintes Variationnelles
Le premier exemple concerne l'tude d'un problme avec des
contraintes variationnelles
[Dai 89]. Considrons un systme mcanique contrainte de position
x(t), de vitesse
v(t) = _x(t) d'nergie cintique T (x(t); v(t)), sous l'inuence
d'une force extrieure f(x(t); v(t); t)
et sous la contrainte (x(t)) = 0. La formulation de
Lagrange-Euler du systme peut se
mettre sous la forme suivante :8
-
12 Chapitre 1. Sur la reprsentation et l'analyse des systmes
singuliers
1.3.2 Systmes dynamiques singuliers de Leontief
Le modle dynamique fondamental de Leontief [Luen 77] des systmes
conomiques est un
systme singulier. Son modle de description est :
x(k) = Ax(k) +B[x(k + 1) x(k)] + d(k) (1.5)
avec x(k) un vecteur de dimension n qui correspond au niveau de
production de n secteurs
au moment k et A 2 Rnn la matrice d'entre-sortie appele aussi
matrice de production.Ax(k) reprsente une partie de la production
exige comme entre pour la production
courante, B 2 Rnn est la matrice des coecients de stock. B[x(k +
1) x(k)] est laquantit pour l'expansion des capacits qui apparat
souvent sous la forme de capital.
Le vecteur d(k) reprsente les niveaux de la production qui sont
demands. Les modles
conomtriques
1
de ce type ont t examins par Leontief dans [Leon 53], dans
lequel les
deux cas temps discret et temps continu ont t considrs.
Gnralement, la plupart des lments dans la matrice B sont nulles
d'o B est souvent
singulire. C'est parce que les productions dans un secteur
n'exigent pas de capital en
stock de tous les autres secteurs. La reprsentation (1.5) peut
tre rcrite sous la forme
suivante :
Bx(k + 1) = (In A+B)x(k) d(k) (1.6)Cette quation (1.6)
correspond la forme d'un systme singulier. La reprsentation
sin-
gulire peut surgir naturellement en modlisant un systme
dynamique pratique.
1.3.3 Robot manipulateur trois bras : Skywash
Dans cette section, on se propose de prsenter un modle singulier
d'un robot manipulateur
trois bras, utilis en tant que robot de nettoyage. Le mouvement
de ce robot est limit
par la surface de nettoyage, ce qui conduit aux contraintes de
singularit.
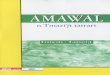
1.3.3.1 Description du systme :
La gure ci-dessous montre un robot manipulateur trois bras
nettoyant la faade d'un
haut btiment [Wann 86]. Le dveloppement de ce genre de
manipulateur fait partie de
plusieurs projets de recherche dans lesquels plusieurs
institutions de recherche sont im-
pliqus [Wann 90], [Hill 94]. Ce manipulateur mobile appel
Skywash appartient une
1. L'conomtrie est une branche de la science conomique qui a
pour objectif d'estimer et de tester
les modles conomiques, partir de donnes issues de l'observation
du fonctionnement rel de l'conomie
ou provenant d'expriences contrles.
tel-0
0757
821,
ver
sion
1 - 2
7 No
v 20
12
-
1.3. Exemples de systmes singuliers 13
classe important de robots de service largement utiliss dans la
construction, les services
publiques, et la protection de l'environnement [Schr 93].
La tche de ce manipulateur est de nettoyer la rgion entre les
points A et B.
A
B
l1
l2
l3
1
2
3
y
x
gure 1.1 Robot manipulateur trois bras
Ce robot accomplit cette tche en dplaant le terminal du
manipulateur du point A vers
le point B plusieurs reprises avec une force de contact
spcique.
Avant d'entamer la modlisation, on suppose que la surface plane
nettoyer est un corps
rigide et que l'extrmit du troisime bras est plate, lisse et
rigide. Ainsi, il y a deux
contraintes sur le mouvement du robot :
La restriction sur le mouvement dans la direction de x, toujours
donne par x 1m=s. L'orthogonalit du troisime bras sur la surface de
nettoyage peut tre dcrite par :
1 + 2 + 3 = 0
Ces deux contraintes doivent tre vries pendant la phase de
nettoyage.
1.3.3.2 Modlisation du systme :
La dynamique du robot peut tre prsente travers des quations de
mouvement en
utilisant l'approche de d'Euler-Lagrange [Crai 86]. L'criture
matricielle des quations du
tel-0
0757
821,
ver
sion
1 - 2
7 No
v 20
12
-
14 Chapitre 1. Sur la reprsentation et l'analyse des systmes
singuliers
mouvement sous une fonction de contraintes donne le modle
dynamique du manipulateur
trois bras gure 1.1. Ce modle est dcrit par les quations
suivantes [Guan 10] :M() = C(; _)G() + F T + u () = 0(1.7)
avec 2 R3, _ 2 R3, 2 R3 reprsentent respectivement les
positions, les vitesseset les acclrations articulaires, u 2 R3
dsigne le vecteur des couples de commandeappliqus aux
articulations, F =
@ @est la Jacobienne de la fonction des contraintes
(), 2 R2 reprsente le vecteur des multiplicateurs lagrangien, F
T est le vecteur desforces gnralises. La fonction des contraintes
() est donne par :
() =
l1 cos(1) + l2 cos(1 + 2) + l3 cos(1 + 2 + 3) l
1 + 2 + 3
M() 2 R33 est la matrice d'inertie du systme, et est donne par
:
M() =
24 m11 m12 m13m21 m22 m23m31 m32 m33
35avec :
m11() = m1l21 +m2(l
21 + l
22 + 2l1l2 cos(1)) +m3(l
21 + l
22 + 2l1l2 cos(2))
+m3(2l2l3 cos(3) + 2l2l3 cos(2 + 3));
m12() = m2(l22 + 2l1l2 cos(2)) +m3(l
22 + l
23 + 2l1l2 cos(2) + 2l2l3 cos(3)
+m3(l1l3 cos(2 + 3));
m22() = m2l22 +m3(l
22 + l
23 + 2l2l3 cos(3);
m23() = m3(l23 + l2l3 cos(3);
m33() = m3l23; m21 = m12; m32 = m23; m13 = m31 = 0
C(; _) 2 R3 est le vecteur des forces et/ou des couples dus aux
acclrations centrifugeet de Coriolis, qui est donn par :
C(; _) = CI()N + CII()s (1.8)
avec : CI() est la matrice des couples de Coriolis, CII() est la
matrice des couples
centrifuges.
N =
24 _1 _2_1 _3_2 _3
35 ; s =24 _21_22
_23
35
tel-0
0757
821,
ver
sion
1 - 2
7 No
v 20
12
-
1.3. Exemples de systmes singuliers 15
et
CI() =
24 cI;11 cI;12 cI;13cI;21 cI;22 cI;23cI;31 cI;32 cI;33
35 ; CII() =24 cII;11 cII;12 cII;13cII;21 cII;22 cII;23cII;31
cII;32 cII;33
35o
cI;11() = 2m2l1l2 sin(2) 2m3l1(l2 sin(2) + l3 sin(2 +
3));cI;12() = 2m3l3(l2 sin(3) + l1 sin(2 + 3));cI;13() =
cI;12()
cI;21() = cI;32() = cI;33() = 0
cI;22() = cI;23() = cI;31() = 2m3l2l3 sin(3)cII;11() = cII;22()
= cI;33() = 0
cII;21() = cI;12() = (m2 +m3)l1l2 sin(2) +m3l1l3 sin(2 +
3);cII;31() = cI;13() = m3l3(l2 sin(3) + l1 sin(2 + 3));cII;32() =
cI;23() = m3l2l3 sin(3)
et G() 2 R3 est le vecteur des forces et/ou couples dus aux
forces de gravitation. Il estdonne par :
GT () =g1() g2() g3()
avec :
g1() = gm1l1 cos(1) + gm2(l1 cos(1) + l2 cos(1 + 2))
+gm3(l1 cos(1) + l2 cos(1 + 2) + l3 cos(1 + 2 + 3));
g2() = gm2l2 cos(1 + 2) + gm3(l2 cos(1 + 2) + l3 cos(1 + 2 +
3));
g3() = gm3l3 cos(1 + 2 + 3)
Si l'on choisit comme vecteur d'tat, le vecteur dni par :
xT =T _T T
Tavec =
1 2 3
Tet =
1 2
Tet comme vecteur de sorties, le vecteur
y(t) =1 3 1 2
T, alors le systme (1.7) peut tre dcrit par le modle
singulier
non linaire suivant : E() _x(t) = A()x(t) +B()u(t)y(t) =
Cx(t)(1.9)
o
E() =
24 I3 0 00 M() 00 0 0
35 ; A() =24 0 I3 0G() C(; _) F T
F 0 0
35 ; B() =24 0I3
0
35
tel-0
0757
821,
ver
sion
1 - 2
7 No
v 20
12
-
16 Chapitre 1. Sur la reprsentation et l'analyse des systmes
singuliers
Notons que plusieurs autres applications et processus peuvent
tre formules par des qua-
tions algbro-direntielles ou systmes singuliers. De ce fait,
l'tude et le dveloppement
des mthodologies d'analyse et de synthse des systmes singuliers
est d'une importance
grandissante dans divers domaines.
1.4 Les systmes singuliers linaires
L'utilisation des lois de la physique qui rgissent ou dcrivent
les comportements des
systmes, sont souvent reprsents par des fonctions non linaires.
La linarisation de ces
fonctions autour d'un point d'quilibre permet d'aboutir un
comportement localement
linaire du systme originel. En eet, considrant le modle
singulier suivant :E _x(t) = Ax(t) +Bu(t)y(t) = Cx(t)
+Du(t)(1.10)
Ce systme (1.10), est obtenu aprs la linarisation de (1.2)
autour d'un point d'quilibre
(x; u) = (0; 0) avec :
E =@f
@ _x
x=0u=0
; A =@f
@x
x=0u=0
; B =@f
@u
x=0u=0
; C =@g
@x
x=0u=0et D =
@g
@(u)
x=0u=0
Dans la description (1.10) ; x(t) 2 Rn est le vecteur des
variables d'tat, u(t) 2 Rpreprsente l'entre de commande et y(t) 2
Rm est le vecteur des sorties mesurables.E, A 2 Rnn, B 2 Rnp, C 2
Rnm et D 2 Rmp sont des matrices constantes.Les systmes singuliers
linaires ont t tudis principalement par L. Dai [Dai 89] et F.
L.
Lewis [Lewi 86]. Les auteurs ont discut plusieurs proprits de
cette classe de systmes
telles que les notions de rgularit, d'observabilit et de
commandabilit ainsi que les
direntes stratgies de commande et d'observation. Ces tudes ont
donn naissance
l'analyse numrique des systmes d'quations
algbro-direntielles.
Avant d'entamer l'tude des proprits des systmes singuliers, il
est intressant de noter
que ces systmes peuvent admettre une structure base sur le
concept de la matrice de
transfert qui fournit un rapport entre les entres et les sorties
du systme. Le concept
de la matrice de transfert permet de reprsenter le comportement
dynamique du systme
(1.10) de manire algbrique tel que :
G(s) = C(sE A)1B +D (1.11)
Pour un systme dynamique, la fonction de transfert existe si la
matrice (sE A) estnon singulire. La non-singularit de cette matrice
est dnie par la rgularit du sys-
tme originel. Dans la suite, on se propose d'tudier la rgularit
et l'impulsivit des
tel-0
0757
821,
ver
sion
1 - 2
7 No
v 20
12
-
1.4. Les systmes singuliers linaires 17
systmes singuliers linaires ainsi que les leurs formes
quivalentes. Dans les paragraphes
qui suivent, certaines caractristiques particulires des systmes
singuliers linaires rgu-
liers sont introduites. Il s'agit notamment de la solvabilit, la
stabilit, l'atteignabilit
ainsi que l'observabilit des systmes singuliers linaires.
1.4.1 Rgularit et Impulsivit des systmes singuliers linaires
La rgularit est une proprit trs importante pour les systmes
singuliers linaires. Elle
garantit l'existence et l'unicit des solutions pour cette classe
de systmes. Considrant
le systme singulier linaire (1.10), la rgularit de ce systme
concerne seulement les
matrices E et A.
Dnition 1.1 (Rgularit) Le couple matriciel (E;A) du systme
(1.10) est dit rgulier
[Dai 89] si et seulement si le polynme :
det(sE A) 6= 0
o s dsigne l'oprateur de Laplace.
Dans le cadre des systmes standards, la notion de rgularit est
toujours vrie dans
la mesure o pour toute condition initiale x(0) et une commande
u(t) connue sur un
intervalle [0; t], la sortie y(t) du systme existe et est
unique. En revanche, dans le cadre
des systmes singuliers, la sortie est unique pour une condition
initiale dnie et une loi
de commande connue si le couple (E;A) est rgulier. De plus,
l'impulsivit des systmes
physiques reprsente un phnomne indsirable et soulve un problme
lors de l'tude de
la stabilit et de la stabilisation. En eet, il est important de
vrier a priori si le systme
tudier n'est pas impulsif. De ce fait, un systme est dit
non-impulsif impulse free si
sa rponse temporelle reste continue pour toute condition
initiale et quelque soit le signal
de commande u(t).
Dnition 1.2 (Systme non impulsif) Un systme est dit non impulsif
[Marx 03] c'est-
-dire n'admet pas de modes impulsifs si pour toute condition
initiale x0 et toute commande
u(t) de classe , la solution x(t) est continue.
Le thorme suivant rsume certaines conditions de base pour qu'un
systme singulier
linaire soit non-impulsif.
tel-0
0757
821,
ver
sion
1 - 2
7 No
v 20
12
-
18 Chapitre 1. Sur la reprsentation et l'analyse des systmes
singuliers
Thorme 1.1 [Dai 89] Le systme singulier linaire rgulier (1.10)
est non-impulsif (le
couple (E;A) est non impulsif) si est seulement si la condition
suivante est vrie :
rang
E 0A E
= n+ rang(E) (1.12)
1.4.2 Equivalence entre systmes singuliers
Le choix des variables d'tat utilises pour dcrire un processus
singulier donn (E;A;B;C)
n'est pas gnralement unique et par consquent le modle qui le
dcrit n'est pas unique.
Il existe deux formes quivalentes de reprsentation d'tat des
systmes singuliers linaires
qui sont :
La forme de Kronecker-Weierstrass qui existe que lorsque la
paire (E;A) est rgulire. La dcomposition en valeurs singulires.Ces
formes sont utilises pour l'analyse et la synthse des systmes
singuliers.
1.4.2.1 Forme quivalente par dcomposition de
Kronecker-Weierstrass
La dcomposition de Kronecker-Weierstrass [Dai 89] est obtenue
par l'utilisation du r-
sultat suivant :
Pour tout systme de la forme (1.10) qui admet un couple (E;A)
rgulier, il existe deux
matrices non singulires U1 et U2, telles que :
U1EU2 =
In1 00
et U1AU2 =
A1 00 In2
Le systme (1.10) est quivalent :
_x1(t) = A1x1(t) +B1u(t) (1.13)
_x2(t) = x2(t) +B2u(t) (1.14)
y(t) = C1x1(t) + C2x2(t) (1.15)
o x1 2 Rn1 , x2 2 Rn2 , n1 + n2 = n et est une matrice
nilpotente [Guan 10], i.e.,toutes ses valeurs propres sont
nulles.
est d'indice de nilpotence ( dim()) tel que 1 6= 0 et = 0.
U1B =
B1B2
; CU2 =
C1 C2
et U12 x =
x1x2
La dynamique du sous-systme (1.13) est xe par les valeurs
propres de la matrice A1.
Le modle (1.13) est appel souvent sous-systme causal ou lent,
tandis que le modle
(1.14) est appel sous-systme non causal ou rapide.
tel-0
0757
821,
ver
sion
1 - 2
7 No
v 20
12
-
1.4. Les systmes singuliers linaires 19
Dnition 1.3 (Systme causal) [Marx 03] Le systme (1.10) o le
triplet (E;A;B) est
dit causal si pour chaque condition initiale x0 et u(t)
admissible (x0 = x(0)), le systme
admet une solution qui peut tre crite sous une forme ne
contenant pas la driv de u(t).
D'une faon gnrale, les matrices U1 et U2, qui transforment un
systme singulier en sa
forme quivalente dnie par (1.13)-(1.15), ne sont pas uniques.
Cela revient dire, qu'il
existe d'autres formes quivalentes du systme singulier.
1.4.2.2 Forme quivalente par dcomposition en valeurs
singulires
La seconde forme quivalente est fonde sur la dcomposition en
valeurs singulires [Guan 10]
de la matrice E. En eet, pour toute matrice E 2 Rnn il existe
deux matrices non sin-gulires V1 et V2 telle que :
V1EV2 =
Ir 00 0
L'utilisation de ces deux matrices permet de reprsenter le
systme (1.10) sous la forme
suivante :
_x1(t) = A11x1(t) + A12x2 +B1u(t) (1.16)
0 = A21x1(t) + A22x2 +B2u(t) (1.17)
y(t) = C1x1(t) + C2x2(t) (1.18)
avec V1AV2 =
A11 A12A21 A22
; V1B =
B1B2
; CV2 =
C1 C2
; V
12 x =
x1x2
,
x1 2 Rr et x2 2 Rnr, o r = rang(E).La description dnie par
(1.16)-(1.18) reprsente la deuxime forme quivalente du sys-
tme singulier (1.10). Dans cette transformation, les matrices V1
et V2 ne sont pas uniques,
ce qui implique l'existence d'autre formes quivalentes. La
dcomposition en valeurs sin-
gulires, rete la signication physique des systmes singuliers.
Par consquence, l'qua-
tion (1.16) est une quation direntielle qui constitue la mmoire
du systme. La relation
(1.17) est une equation statique qui voque l'interconnection des
variables d'tat. Ainsi,
un systme singulier peut tre reprsent comme un systme compos de
plusieurs sous-
systmes interconnects.
tel-0
0757
821,
ver
sion
1 - 2
7 No
v 20
12
-
20 Chapitre 1. Sur la reprsentation et l'analyse des systmes
singuliers
1.4.3 Rponse temporelle
Nous avons signal dans la section (1.4.1) qu'un systme singulier
linaire a une solution
unique pour une certaine condition initiale si et seulement si
il est rgulier. Dans cette
section, nous allons montrer que la rponse d'un systme singulier
linaire [Mull 00] est
la somme des rponses du sous-systme lent (1.13) et du
sous-systme rapide (1.14).
Le dveloppement est bas sur la forme quivalente par dcomposition
de Kronecker-
Weiestrass du systme singulier (1.10).
1.4.3.1 Rponse temporelle du sous-systme lent
La rponse du sous-modle dynamique (1.13) voluant sous l'eet
d'une entre u(t) peut
tre dtermine partir des conditions initiales donnes en calculant
sparment l'eet
des conditions initiales et de l'entre. En eet, ce sous-systme
admet une solution unique
pour toute entre u(t) connue sur un intervalle [0; t] et pour
toute condition initiale x10.
Cette solution est donne par :
x1(t; u; x10) = x1i(t; x10) + x1u(t; u)
avec x1i(t; x10) est la rponse due la condition initiale x10 qui
est dnie par :
x1i(t; x10) = eA1tx10
et x1u(t; u) est la rponse due l'entre de commande u(t) qui est
dnie par :
x1u(t; u) =
Z t0
eA1(t)B1u()d
D'o, la solution temporelle devient alors :
x1(t) = eA1:tx10 +
Z t0
eA1:(t)B1u()d (1.19)
1.4.3.2 Rponse temporelle du sous-systme rapide
Le lemme (1) suivant donne la rponse temporelle du sous-modle
rapide (1.14) du systme
singulier.
Lemme 1 [Dai 89] Considrons le modle statique (1.14) u(t) 2 C
(de classe ), avec est l'indice de nilpotence de la matrice . Alors
le sous systme (1.14) admet une rponse
temporelle de la forme :
y2(t) = C21X=0
B2u()(t) (1.20)
tel-0
0757
821,
ver
sion
1 - 2
7 No
v 20
12
-
1.4. Les systmes singuliers linaires 21
Pour garantir la continuit de x2(t) par rapport au temps t, il
faut que la commande u(t)
soit au moins de classe . Dans ce sens, la quantit joue un rle
important dans la
thorie des quations algbro-direntielles linaires rgulires. Pour
nir, l'tat x(t) et la
rponse y(t) du systme singulier (1.10) sont donns par :
x(t) = U2
In10
x1(t) + U2
0In2
x2(t)
ce qui est quivalent :
x(t) = U2
In10
(eA1:tx10 +
Z t0
eA1:(t)B1u()d) U2
0In2
1X=0
B2u()(t) (1.21)
et par suite :
y(t) = CU2
In10
(eA1:tx10+
Z t0
eA1:(t)B1u()d)CU2
0In2
1X=0
B2u()(t) (1.22)
La condition initiale qui vrie la contrainte suivante :
pour t ! 0+ x(0+) = U2In10
x10 U2
0In2
1X=0
B2u()(0+) (1.23)
est appele condition initiale admissible
2
. Donc un systme singulier a une trajectoire
unique lorsque la condition initiale x(0) est admissible et que
la commande u(t) est
( 1) fois continment drivable par morceaux [Marx 03]. Pour
s'aranchir des hypo-thses portant sur l'entre de commande u(t) et
la condition initiale x(0), les auteurs
[Cobb 83] et [Verg 81] ont suggr que les systmes singuliers
devraient adopter une solu-
tion gnralise en utilisant la thorie de distributions. Rappelons
que, la drive au sens
des distributions, note f 0 d'une fonction f continue par
morceaux, prsentant des sauts
d'amplitude fi au point i pour i = 1; :::; est donne par [Marx
03] :
f 0(x) = fx +X
k=1
fk(x i)
avec fx est la drive de f par rapport la variable x et (t) est
l'impulsion unitaire. En ef-
fet, pour u(t) une fonction continue par morceaux de classe ,
l'quivalence distributionnel
du sous systme non causal (1.14) devient alors :
_x02 x2(0)(t) = x2(t) +B2u(t) (1.24)2. Le terme admissible est
utilis pour dcrire les conditions initiales qui donnent naissance
une
solution unique.
tel-0
0757
821,
ver
sion
1 - 2
7 No
v 20
12
-
22 Chapitre 1. Sur la reprsentation et l'analyse des systmes
singuliers
En utilisant l'expression de l'tat x2(t) de (1.20), on obtient
alors :
x2(t) = 1X=1
(1(t)x2(0)1X=0
B2u()(t) (1.25)
C'est la forme gnrale de la solution du sous systme rapide
(1.14) aux sens de distribu-
tions. Cette solution est appele solution de distribution, dans
lequel les termes impulsifs
apparaissent. Il rsulte de (1.19) et (1.25) que la rponse gnrale
de l'tat est donne
par :
x(t) = U2
In10
(eA1:t
In1 0
U12 x(0) +
Z t0
eA1:(t)B1u()d)
U2
0In2
(1X=1
(1(t)0 In2
U12 x(0) +
1X=0
B2u()(t)) (1.26)
D'aprs l'expression (1.26), la rponse d'un systme singulier
admet une forme complique.
Il comporte non seulement une partie exponentielle, qui dpend
des valeurs propres de A1,
de la condition initiale x10 et de l'entre u(t) sur [0; t]
(rponse du sous systme causal),
mais aussi une partie qui dpend des drivs de l'entre de commande
(rponse du sous
systme non causal). Cette dirence fondamentale entre les deux
sous systmes est
l'origine des appellations des sous systmes lent et rapide.
1.4.4 Stabilit des systmes singuliers linaires
La stabilit est la proprit qui permet un systme de revenir son
tat d'quilibre
en un temps ni lorsque l'eet de la perturbation a cess. Cette
proprit est essentielle
pour garantir le fonctionnement sr d'un systme dynamique. Dans
ce paragraphe, nous
tudions la stabilit des systmes singuliers . Ce concept est une
extension de la stabilit
des systmes ordinaires.
Dnition 1.4 [Wu 94] Soit B une rgion ouverte de rayon , i.e., B=
fx 2 Rn; kxk < g,et x = x(t; t0;Ex(0)) la solution du systme
(1.2). Le point d'quilibre x = 0 du systme
(1.2) est dit stable si pour chaque > 0, et t0 2 R+, il
existe = (; t0) > 0 tel que six(0) 2 B, alors :
kx(t; t0; Ex(0))k < 8 t t0
Note : La condition initiale est donne sous la forme de Ex(0) 2
ImE, i.e., c'est unecondition initiale consistante que satisfait le
systme singulier correspondant [Wang 06].
tel-0
0757
821,
ver
sion
1 - 2
7 No
v 20
12
-
1.4. Les systmes singuliers linaires 23
Rappelons qu'une condition initiale donne dans l'espace de E est
appele consistante,
dans le sens que les solutions seront continuellement dpendantes
de celle-ci.
De mme, les dnitions de la stabilit uniforme et de la stabilit
asymptotique pour les
systmes ordinaires peuvent tre gnralises aux systmes
singuliers.
Dnition 1.5 [Wang 06] Le point d'quilibre x = 0 du systme (1.2)
est dit asymptoti-
quement stable si il est stable et, il existe un 0(t0) > 0
tel que si
x(0) 2 B0 ) limt!1
kx(t; t0; Ex(0))k = 0
La dnition mentionne ci-dessus est aussi valable pour le cas des
systmes singuliers
linaires.
On dmontre que dans le cas linaire un systme singulier caractris
par la paire (E; A)
(1.10) est asymptotiquement stable si les ples de det(sE A) = 0
sont partie rellengative [Wang 06]. Dans ce cas on convient de dire
que le couple (E;A) est dit stable.
1.4.5 Admissibilit des systmes singuliers linaires
Dans le cadre des modles singuliers, il est plus adquat de
parler de l'admissibilit plutt
que de la stabilit [Dai 89]. En eet, dans la plupart des
situations, les termes impulsifs
ne sont pas souhaitables, car ils peuvent saturer la rponse de
l'tat ou mme dtruire le
systme. De ce fait, et pour que le systme singulier soit stable
et non-impulsif impulse
free , on dnit une notion supplmentaire appele admissibilit.
Dnition 1.6 (Admissibilit) Le systme singulier (1.10) est dit
admissible [Wang 06]
si et seulement si le couple (E;A) est rgulier, non-impulsif et
stable.
Par la suite, et pour tudier l'observabilit des systmes
singuliers, nous allons commencer
par la caractrisation de l'ensemble des tats atteignables depuis
une condition initiale
donne.
1.4.6 tat atteignable
Contrairement aux systmes ordinaires, un systme singulier ne
peut atteindre gnrale-
ment tous les tats possibles dans le sous-espace de dimension n.
Ce concept est gnralis
dans la thorie des systmes singuliers comme l'ensemble des tats
accessibles ou attei-
gnables [Dai 89].
tel-0
0757
821,
ver
sion
1 - 2
7 No
v 20
12
-
24 Chapitre 1. Sur la reprsentation et l'analyse des systmes
singuliers
Dnition 1.7 (tat atteignable) [Dai 89] : un tat xa(t) 2 Rn est
dit atteignable, s'ilexiste une condition initiale x(0) et une
entre de commande admissible u(t) et tf > 0
telles que x(tf ) = xa(t)
Notons par R(0) l'ensemble des tats atteignables depuis une
condition initiale nulle
x(0) = 0. R(0) est alors dni par :
R(0) = ImB1 A1B1 An111 B1
Im B2 NB2 N11 B2 avec dsigne la somme directe des espaces
vectoriels.
1.4.7 Observabilit des systmes singuliers
Le problme fondamental de l'analyse de l'observabilit d'un
systme physique est de pou-
voir dire si l'tat du systme peut tre dtermin en fonction des
entres et des sorties.
Dans l'armative, la thorie de l'estimation fournit des outils
pour reconstruire cet tat ;
nous rappelons que la connaissance des composantes de l'tat non
mesures est en gnral
ncessaire pour rgler un systme ou pour dtecter les dfauts d'un
systme. La valeur
initiale de l'tat d'un systme est en gnral inconnue. On peut
alors se poser la question :
sous quelles conditions l'tat du systme peut-il tre dtermin
partir des sorties et des
entres ? Ce problme est appel problme d'observabilit.
Contrairement aux systmes ordinaires, il y a plusieurs concept
d'observabilit pour les
systmes singuliers. Dans cette section, nous allons rappeler les
dirents concepts inter-
venant dans l'analyse de l'observabilit de cette classe des
systmes.
Dnition 1.8 (Observabilit) [Marx 03] :
Le systme (1.10) est dit observable si la condition initiale
x(0) peut tre dtermine de
manire unique par u(t) et y(t) pour t 2 [0;+1[.
Le thorme suivant caractrise l'observabilit du systme singulier
(1.10) avec ses sous-
modles dynamique (1.13) et statique (1.14).
Thorme 1.2 [Dai 89]
1: Le sous-systme causal (1.13) est observable si et seulement
si
rang
sE A
C
= n; 8 s 2 C
2: Les propositions suivantes sont quivalentes.
tel-0
0757
821,
ver
sion
1 - 2
7 No
v 20
12
-
1.4. Les systmes singuliers linaires 25
2 a: Le sous-systme statique (1.14) est observable.
2 b: rang CT2 TCT2 (1)TCT2 T = n2.2 c: rang T CT2 T = n2.2 d:
rang[ET CT ]T = n.
3: Les propositions suivantes sont quivalentes.
3 a: Le systme singulier est observable.
3 b: Les sous-systmes dynamique (1.13) et statique (1.14) sont
observables.
3c: rang CT1 AT1CT1 (An111 )TCT1 T=n1 et rang CT2 TCT2 (1)TCT2
T=n2.3 d: rang[sET AT CT ]T = n et rang[ET CT ]T = n.
3 e: La matrice
O =
266666666666664
A EA E.
.
.
A EA
CC.
.
.
C
377777777777775(n+r1)nn2
est de plein rang colonne.
L'observabilit rete la capacit de reconstruire l'tat entier
partir de la sortie mesure
et l'entre du systme. Pour tudier l'observabilit du sous-systme
causal, on dnit
le concept de R-observabilit qui caractrise la capacit de
reconstruire seulement l'tat
atteignable partir des donnes sur les entres et les sorties.
Dnition 1.9 (R-Observabilit) [Marx 03] : Le systme (1.10) est
dit R-observable s'il
est observable dans l'ensemble atteignable.
tel-0
0757
821,
ver
sion
1 - 2
7 No
v 20
12
-
26 Chapitre 1. Sur la reprsentation et l'analyse des systmes
singuliers
Thorme 1.3 [Dai 89]
Les propositions suivantes sont quivalentes.
1: Le systme singulier (1.13)- (1.14) est observable.
2: Le sous-systme (1.13) est observable
3: rang
sE A
C
= n; 8 s 2 C:
4: La matrice
O =
266666666666664
A EA E.
.
.
A EA
CC.
.
.
C
377777777777775(n+r1)nn2
est de plein rang colonne.
La proposition 3 permet de verier la R-observabilit du systme
singulier linaire.
La R-observabilit ne concerne que l'tat atteignable, donc ne
rete pas l'observabilit des
termes impulsifs. L'observabilit de ces termes revient tudier
l'observabilit impulsive
ou Impo-observabilit [Daro 95].
Dnition 1.10 (Observabilit Impulsive) [Dai 89] : Le systme
(1.10) est dit Impo-
observable si les termes impulsifs de l'tat peuvent tre dtermins
de manire unique
partir de y(t) et u(t).
Thorme 1.4 [Dai 89] On considre le modle de la forme quivalente
(1.13)-(1.14),
les propositions suivantes sont quivalentes.
1: Le systme (1.13)-(1.14) est Impo-observable.
2: Le sous modle non causal (1.14) est Impo-observable.
3: rang
24 E A0 E0 C
35 = n+ rang(E), et rang EC
= n.
4: KerT
Ker C2T
Im = f0g.
tel-0
0757
821,
ver
sion
1 - 2
7 No
v 20
12
-
1.4. Les systmes singuliers linaires 27
Pour un systme singulier donn, l'observabilit, la R-observabilit
et l'observabilit im-
pulsive prcisent la capacit de construire les variables d'tat.
Un systme est Impo-
observable s'il est observable, l'inverse n'est pas vraie. La
relation entre ces trois concepts
d'observabilit peut tre illustre par le diagramme suivant :
E; A; C) observable ,
8>>>:(In1; A1; C1)
observable ,(E;A;C)
R observable
(; In2; C2)
observable )(E;A;C)
impo observable
1.4.8 Dtectabilit des systmes singuliers
Pour les systmes linaires ordinaires, le concept de dtectabilit
est plus faible que l'ob-
servabilit. La dtectabilit est la condition minimale pour qu'un
systme ordinaire peut
avoir un observateur d'tat. Ce concept peut galement tre gnralis
au cas des systmes
singuliers linaires.
La dtectabilit assure que les ples nis instables sont
observables, ou les ples non
observables sont stables.
Dnition 1.11 (Dtectabilit des modes non impulsifs) : [Boul 08]
Les modes non im-
pulsifs du systme linaire singulier (1.10) sont dtectables si la
relation suivante est
satisfaite
rang
sE A
C
= n 8 s 2 C avecRe(s) 0 (1.27)
Dnition 1.12 (Dtectabilit des modes impulsifs) : [Boul 08] Les
modes impulsifs du
systme linaire singulier (1.10) sont dtectables si la relation
suivante est satisfaite
rang
24 E A0 E0 C
35 = n+ rangE (1.28)
tel-0
0757
821,
ver
sion
1 - 2
7 No
v 20
12
-
28 Chapitre 1. Sur la reprsentation et l'analyse des systmes
singuliers
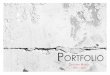
Exemple 1 : Circuit lectrique :
Considrons le circuit lectrique reprsent par la gure suivante
[Marx 03] :
R1
R2
q(t)C
L
u(t)
i1(t) i2(t)
i3(t)
gure 1.2 circuit lectrique
Le circuit est command par une tension u(t). Les courants i1(t)
et i2(t) traversant respec-
tivement les deux rsistances R1 et R2 sont considrs comme des
variables de sorties. La
charge au bornes du condensateur de capacit C est note q(t) et L
dsigne une inductance
pure. Si l'on choisit comme variables d'tat q(t), i2(t) et
i3(t), on a alors les quations
dynamiques et algbriques suivantes :
dq(t)dt
= u(t)=R11=(CR1)q(t)i2(t) : L'intensit qui traverse le
condensateur. Ldi2(t)
dt= 1
Cq(t)R2i2(t) : La tension aux bornes de l'inductance.
1Cq(t)+R1i1(t)u(t) = 0, 1C q(t)+R1i2(t)+R1i3(t)u(t) = 0 :
L'quation algbriqueCes quations peuvent se mettre sous la forme
d'un systme singulier comme suit :24 1 0 00 1 0
0 0 0
3524 _q(t)_i2(t)_i3(t)
35 =24 1=(CR1) 1 01=(LC) R2=L 0
1=C R1 R1
3524 q(t)i2(t)i3(t)
35+24 1=R10
1
35u(t)y(t) =
0 1 10 1 0
24 q(t)i2(t)i3(t)
35(1.29)
Le modle singulier (1.29) peut tre crit sous la forme quivalente
de Kronecker-Weierstrass
(1.13)-(1.15) avec :
U1 =
24 1 0 00 1 00 0 0
35 ; U2 =24 1 0 00 1 0
0 1 1
35 ; A1 = 1=(CR1) 11=(LC) R2=L
= 0; B1 =
1=R10
; B2 = 0; C1 =
0 00 1
; C2 =
10
tel-0
0757
821,
ver
sion
1 - 2
7 No
v 20
12
-
1.5. Systme singulier linaire paramtres variants (LPV) 29
Pour tudier l'observabilit du circuit lectrique dcrit par
(1.29), vrions la condition
3 c: du thorme (1.2),rang
C1C1A1
= n1 = 2 et rang
C2
= 1.
Le systme tudi est donc observable.
1.5 Systme singulier linaire paramtres variants (LPV)
Les systmes singuliers linaires paramtres variants (LPV) [Hamd
09] reprsentent
une gnralisation de la classe des systmes singuliers temps
variant (LTV).
La principale dirence provient de la particularit que pour les
systmes LPV, la dpen-
dance temporelle est dissimule dans les paramtres variables dans
le temps (t) 2 Rl.Ces systmes sont dcrits par une reprsentation
d'tat de la forme suivante :
E _x(t) = A((t))x(t) +B((t))u(t)y(t) = C((t))x(t)(1.30)
L'utilisation du terme LPV suggre que les paramtres peuvent tre
connus en temps
rel alors que le terme LTV signie que le systme est non
stationnaire (modle linaire
coecients variables dans le temps). De ce fait, un systme
singulier LTV est un cas
spcial d'un systme LPV quand le vecteur des paramtres variants
dans le temps est gal
au temps, i.e.
(t) = t; l = 1
D'un point de vue pratique, les systmes singuliers LPV peuvent
tre considrs comme
tant des systmes singuliers linaires temps-invariant (LTI) aects
par une incerti-
tude paramtrique temps variant (t) ou des modles rsultant de la
linarisation des
processus non linaires le long d'une trajectoire de paramtre
(t).
Il est possible de rapprocher des systmes singuliers non
linaires par une classe spcique
de systmes LPV appel quasi-LPV (qLPV) lorsque certains lments
des paramtres va-
riants (t) sont choisis comme tant des signaux du systme. Ces
systmes sont obtenus
via une transformation LPV directe [Bria 08] ou en utilisant la
reprsentation de Takagi-
Sugeno [Taka 85].
1.5.1 Reprsentation des systmes singuliers (LPV)
Les systmes singuliers LPV peuvent tre classs en plusieurs
familles selon la faon dont
les paramtres agissent sur le systme. Parmi la grande varit de
ces systmes LPV, il
est possible de distinguer trois types principaux qui sont
couramment utiliss pour faire
face des systmes LPV.
tel-0
0757
821,
ver
sion
1 - 2
7 No
v 20
12
-
30 Chapitre 1. Sur la reprsentation et l'analyse des systmes
singuliers
1.5.1.1 Systme singulier (LPV) ane
La reprsentation ane des systmes singuliers LPV est la forme la
plus simple qui peut
tre rencontre. Les matrices de l'espace d'tat du systme (1.30)
dpendent des para-
mtres variants. Leurs expressions gnrales sont donnes par :
A((t)) = A0+1(t)A1+ +l(t)AlB((t)) = B0+1(t)B1+ +l(t)BlC((t)) =
C0+1(t)C1+ +l(t)C l(1.31)
Notons que le paramtre (t) varie dans un polytope de sommets i
[Rodr 05] tels que
i 2 = f1; :::; lg. Chaque paramtre i varie entre les bornes
limites connues de (t).i 2 [i; i]
1.5.1.2 Systme singulier (LPV) polytopique
Le passage entre la reprsentation ane et polytopique des systmes
singuliers LPV est
possible car chaque matrice reprsentant le systme est une
combinaison barycentrique
de plusieurs matrices :
A((t)) =1((t))A1+2((t))A2+ +h((t))AhB((t)) =1((t))B1+2((t))B2+
+h((t))BhC((t)) =1((t))C1+2((t))C2+ +h((t))Ch(1.32)
La forme polytopique du systme singulier LPV est rgie par les
expressions suivantes :8>>>:E _x(t) =
hPi=1
i((t))(Aix(t) +Biu(t))
y(t) =hPi=1
i((t))Cix(t
(1.33)
avec :
i() 0;hXi=1
i((t)) = 1 (1.34)
et
h = 2l
Le terme polytopique vient du fait que le vecteur(t) volue dans
un polytope dni par :
=
(((t)) 2 Rh; i((t)) 0; 8 i;
hXi=1
i((t)) = 1
)(1.35)
Il est important de noter que tout systme paramtres variants
peut tre exprim comme
un systme polytopique. La modlisation LPV polytopique ore un
cadre adquat pour
aborder le problme d'observation et de diagnostic des systmes
singuliers notamment
l'aide de l'outil LMI.
tel-0
0757
821,
ver
sion
1 - 2
7 No
v 20
12
-
1.6. Systme singulier non linaire 31
1.5.1.3 Reprsentation linaire fractionnaire (LFR)
Cette reprsentation est l'interconnexion d'un systme dynamique
linaire avec une ma-
trice (un systme statique) dpendant des paramtres. Tout type de
systme LPV dont
les matrices d'tat dpendent rationnellement de paramtres, peut
tre mis sous la forme
de LFR [Bria 08]. Cependant il n'est pas toujours ais de trouver
une reprsentation LFR
d'ordre minimale, c'est dire avec une matrice de taille
minimale.
1.6 Systme singulier non linaire
Un systme singulier non linaire est un ensemble d'quations
(direntielles et al-
gbriques) non linaires, dcrivant l'volution temporelle des
variables constitutives d'un
processus sous l'action d'un nombre ni de variables indpendantes
appeles entres ou
variables de commande, ou simplement commandes, que l'on peut
choisir librement pour
raliser certains objectifs. L'quation d'tat d'un systme
singulier non linaire est :E _x(t) = f(x(t); u(t))y(t) = g(x(t);
u(t))(1.36)
avec f et g sont deux fonctions non linaires de dimensions
appropris. Cependant, bien
qu'il y ait des thories compltes pour le traitement analytique
et numrique des systmes
ordinaires, la situation est beaucoup plus complexe dans le cas
des systmes singuliers non
linaires. En eet, plusieurs problmes sont encore sans
rponse.
Cette section prsente quelques proprits des systmes singuliers
non linaires concernant
la rsolution et le concept d'indice [Sjb 06] pour cette classe
de systmes.
1.6.1 Solvabilit des systmes singuliers
La solvabilit [Venk 95] signie qu'il existe une solution qui
satisfait les quations
dynamiques et statiques du modle singulier (1.36) pour un tat
initial donn.
La dnition d'une solution classique est adopte par He-Sheng Wang
et al. [Wang 06] et
est formule comme suit.
Dnition 1.13 Considrons le modle singulier (1.2) et soit T R un
sous-intervallede temps
Le vecteur d'tat x(t) : T 7! Rn est dit une solution de (1.36),
si x(t) est continu etdrivable et satisfait (1.36).
tel-0
0757
821,
ver
sion
1 - 2
7 No
v 20
12
-
32 Chapitre 1. Sur la reprsentation et l'analyse des systmes
singuliers
Dans la suite, un problme est dit solvable s'il admet au moins
une solution. Cette dni-
tion semble normale mais il convient de noter que dans la
majeure partie de la littrature,
le terme solvabilit est employ seulement pour les systmes qui
ont une solution unique
quand les conditions initiales consistantes sont fournies.
1.6.2 Indice des systmes singuliers
Le traitement analytique et numrique des systmes singuliers est
tout fait dirent
et plus compliqu que les systmes ordinaires. La recherche sur ce
type de modles ma-
thmatiques, exige une classication approprie selon certains
degrs de dicult. Cette
condition mne au dveloppement (indpendant) de plusieurs concepts
d'indice [Sjb 06]
pour la classication de dirents types de systmes singuliers. Le
concept d'indice joue
un rle principal dans l'analyse numrique des systmes singuliers.
L'indice d'un modle
singulier fournit une mesure de dicult dans l'tude analytique
aussi bien que dans la
rsolution numrique. Les concepts d'indice les plus couramment
employs dans la littra-
ture, sont l'indice de direntiation et l'indice de perturbation.
Dans la suite nous allons
tudier les notions de ces deux types d'indice.
1.6.2.1 Indice de direntiation
L'indice direntiel est le nombre minimal des direntiations
requises pour obtenir un
systme quivalent base des quations ordinaires.
1.6.2.2 Exemple 1 (Indice 1)
Considrons le systme singulier suivant :_x1(t) = f(x1(t);
x2(t))0 = g(x1(t); x2(t))(1.37)
avec f et g : Rn Rn 7! RnOn suppose que g(x1(t); x2(t)) et x2(t)
sont de mmes dimensions et que les conditions
initiales sont consistantes (x(0) = 0 et g(x1(0); x2(0)) =
0).
Le problme dans le modle prcdent est que la drive de l'tat x2(t)
n'apparat pas
explicitement, ce qui nous oblige chercher comment passer d'un
systme singulier (1.37)
un systme ordinaire rgi seulement par des quations direntielles.
Pour rpondre
cette question, on eectue la direntiation des contraintes
algbriques par rapport au
temps de la faon suivante :
gx1(x1(t); x2(t)) _x1(t) + gx2(x1(t); x2(t)) _x2(t) = 0
tel-0
0757
821,
ver
sion
1 - 2
7 No
v 20
12
-
1.6. Systme singulier non linaire 33
gx1(x1(t); x2(t))f(x1(t); x2(t)) + gx2(x1(t); x2(t)) _x2(t) = 0
(1.38)
avec gx1 et gx2 sont respectivement les matrices Jacobienne
dnies par rapport aux va-
riables d'tat x1 et x2. Si la solution obtenue est inversible,
le systme singulier (1.37)
peut s'crire sous la forme :_x1(t) = f(x1(t); x2(t))_x2(t) =
g1x2 (x1(t); x2(t))gx1(x1(t); x2(t))f(x1(t); x2(t))(1.39)
Le systme ordinaire (1.39) est obtenu aprs une seule
direntiation par rapport au
temps, on dit alors que le systme algbro-direntiel (1.37) est
d'indice 1.
1.6.2.3 Exemple 2 (Indice 2)
Considrons le systme singulier suivant :_x1(t) = f(x1(t);
x2(t))0 = g(x1(t))(1.40)
Pour les mmes conditions initiales de l'exemple 1, si on
direncie le systme une seule
fois, on se ramne : _x1(t) = f(x1(t); x2(t))0 =
gx1(x1(t))f(x1(t); x2(t))(1.41)
Le systme obtenu est encore de type algbro-direntiel. On ralise
nouveau la di-
rentiation du systme (1.41) on obtient alors :
0 = gx1x1(x1(t))f(x1(t); x2(t))f(x1(t); x2(t)) +
gx1(x1(t))fx1(x1(t); x2(t)) _x1(t)+gx1(x1(t))fx2(x1(t); x2(t))
_x2(t)
De la mme manire que l'exemple 1, si gx1fx2 est une matrice
inversible, alors le systme
singulier (1.40) peut s'crire sous la forme ordinaire suivante
:8
-
34 Chapitre 1. Sur la reprsentation et l'analyse des systmes
singuliers
La motivation pour cette dnition est base sur le procd de
rsolution des quations
algbriques (en utilisant leurs drivs si ncessaire) en
transformant le systme singulier
en un systme ordinaire. Il existe aussi un autre type d'indice
pour les systmes algbro-
direntiels ; il s'agit de l'indice de perturbation qui
correspond une mesure de la sensi-
bilit des solutions par rapport aux perturbations du systme.
L'indice de direntiation
et l'indice de perturbation ne sont pas toujours gaux.
1.6.2.4 Indice de perturbation
L'indice de perturbation est une mesure de la sensibilit aux
perturbations d'un systme
singulier de la forme (1.36).
Dnition 1.15 [Hair 89] Soit x(t) une solution de (1.36) sur un
intervalle [t0; T ]. L'in-
dice de perturbation de (1.36) est le plus petit entier p tel
que pour toute fonction x^(t)
de classe C1 vriant :
f( _^x(t); x^(t); u(t)) = (x(t))
il existe une majoration de la forme
kx^(t) x(t)k C0@kx^(t0) x(t0)k+ sup
2[t0; T ]
Z
t0
(t)dt
+p1Xj=0
sup2[t0; T ]
(j)()
1Avalable pour toute fonction de drives susamment petites et o C
est une constante
ne dpendant que de f et de t0 T .
1.6.3 Rduction d'indice
L'indice de direntiation mesure aussi d'une certaine faon la
dicult qu'il y a pour
rsoudre un systme. En eet, la direntiation est une opration qui
introduit des insta-
bilits numriques, donc plus on ralisera de direntiations,
c'est--dire plus l'indice de
direntiation sera lev, plus le systme sera numriquement dicile
rsoudre.
Les solveurs des systmes d'quations direntielles implicites
et/ou d'quations algbro-
direntielles ne savent en gnral rsoudre que les systmes d'indice
1 et quelques sys-
tmes d'indice 2. Lorsque l'on a des systmes d'indice plus lev,
comme dans l'exemple 2
du paragraphe prcdent, il faudra rduire l'indice. L'outil
principale de rduction d'indice
est la direntiation des contraintes algbriques [Kunk 01] pour un
systme singulier.
tel-0
0757
821,
ver
sion
1 - 2
7 No
v 20
12
-
1.6. Systme singulier non linaire 35
1.6.4 Application : Rduction d'indice du modle singulier qui
dcrit un Pendule
Considrons le modle mathmatique du pendule [Sjb 06] reprsent sur
la gure sui-
vante :
xx1
2
gure 1.3 Un pendule
Les quations dcrivant ce modle sont :
_x1(t) = x3(t) (1.42)
_x2(t) = x4(t) (1.43)
_x3(t) = x1(t)x5(t) bx23(t) (1.44)_x4(t) = x2(t)x5(t) bx24(t) g
(1.45)0 = x21(t) + x
22(t) L2 (1.46)
Comme il est reprsent sur la gure 1.3, x1 et x2 sont
respectivement les positions hori-
zontale et verticale du pendule. De plus, x3 et x4 reprsentent
les vitesses horizontale et
verticale du pendule, x5 est la tension de la tige qui est
considre inextensible et sans
masse, la constante b reprsente la force de frottement avec
l'air et g est le champ de
pesanteur. L est la longueur de la tige. Dans la suite et
travers l'exemple du pendule,
nous dvelopperons le concept de rduction d'indice pour le systme
d'quations (1.42) -
(1.46). La direntiation de l'quation algbrique (1.46) par
rapport au temps donne :
2x1(t) _x1(t) + 2x2(t) _x2(t) = 0
Remplaons _x1(t) par x3(t) et _x2(t) par x4(t), nous obtenons
:
x1(t)x3(t) + x2(t)x4(t) = 0 (1.47)
Direncions la dernire quation algbrique (1.47),
( _x1(t)x3(t) + x1(t) _x3(t)) + ( _x2(t)x4(t) + x2(t) _x4(t)) =
0
tel-0
0757
821,
ver
sion
1 - 2
7 No
v 20
12
-
36 Chapitre 1. Sur la reprsentation et l'analyse des systmes
singuliers
De la mme manire, si l'on remplace _x1(t) par x3(t) et _x2(t)
par x4(t), on obtient alors,
(x23(t) + x1(t) _x3(t)) + (x22(t) + x2(t) _x4(t)) = 0 (1.48)
En substituant une autre fois (1.44) et (1.45) dans (1.48), on
obtient :
(x23(t) x1(t)(x1(t)x5(t) + bx23(t)) + (x22(t) x2(t)(x2(t)x5(t) +
bx24(t) + g)) = 0 (1.49)
Si l'on remplace l'quation (1.43) par (1.47) et l'quation (1.45)
par (1.49) le modle du
pendule devient alors :
_x1(t) = x3(t) (1.50)
0 = x1(t)x3(t) + x2(t)x4(t) (1.51)
_x3(t) = x1(t)x5(t) bx23(t) (1.52)0 = 1
L2x23(t) bx1(t)x23(t) x2(t)(bx24(t) + g))
x5(t) (1.53)0 = x21(t) + x
22(t) L2 (1.54)
Le modle obtenu, est d'indice 1. Cette reduction prouve que
seulement x1 et x3 sont
dtermines par des quations direntielles. Les autres variables
sont donnes par les
quations algbriques. Par consquent, la dynamique du systme est
dnie par x1 et x3
alors que x2, x4 et x5