Embed Size (px)
Citation preview
PSI* Lycée P.Corneille tp_equation_mvt.doc
_Page 1_
TP de dynamique Détermination de l’équation de mouvement du gyromètre
Ø Temps alloué 2 heures. Ø Vous disposez du capteur gyroscopique (ou gyromètre) monté sur sa plate forme d’essai
(le robot 6 axes). Ø D’un ordinateur avec le logiciel de pilotage de la plate forme et de mesure de la réponse
du capteur. Ø D’une roue de vélo pour « ressentir » l’effet gyroscopique qui est à la base du
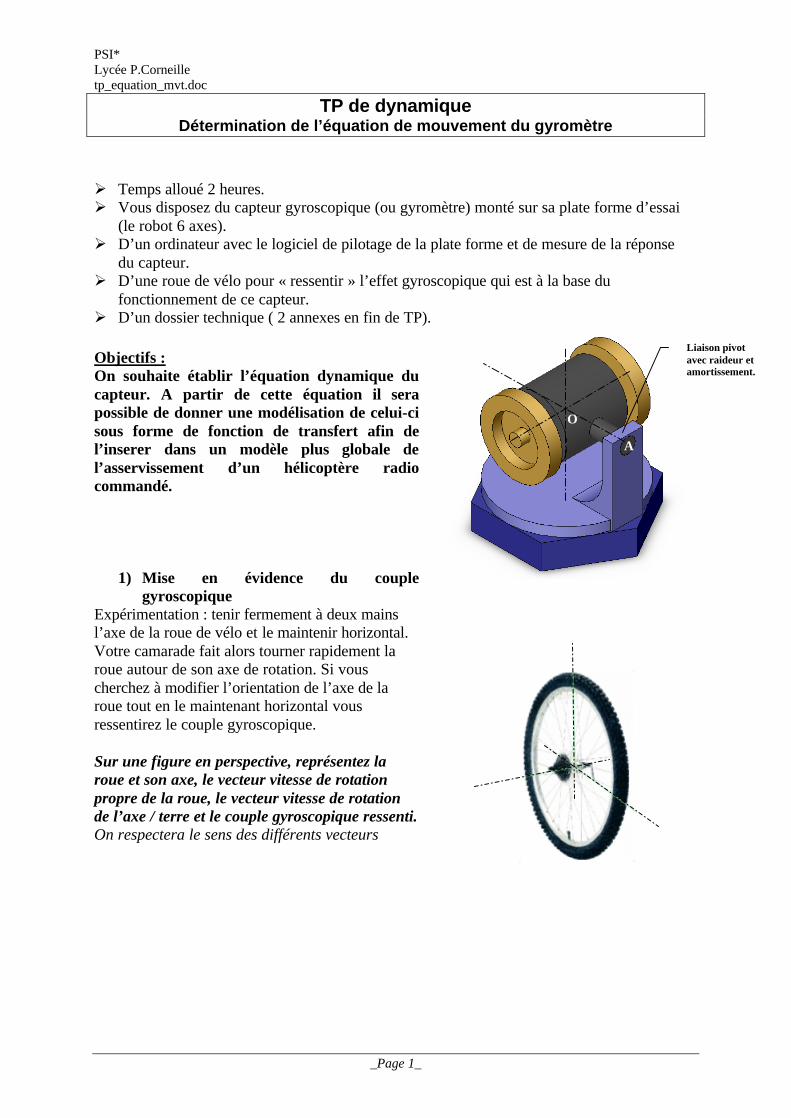
fonctionnement de ce capteur. Ø D’un dossier technique ( 2 annexes en fin de TP). Objectifs : On souhaite établir l’équation dynamique du capteur. A partir de cette équation il sera possible de donner une modélisation de celui-ci sous forme de fonction de transfert afin de l’inserer dans un modèle plus globale de l’asservissement d’un hélicoptère radio commandé.
1) Mise en évidence du couple gyroscopique
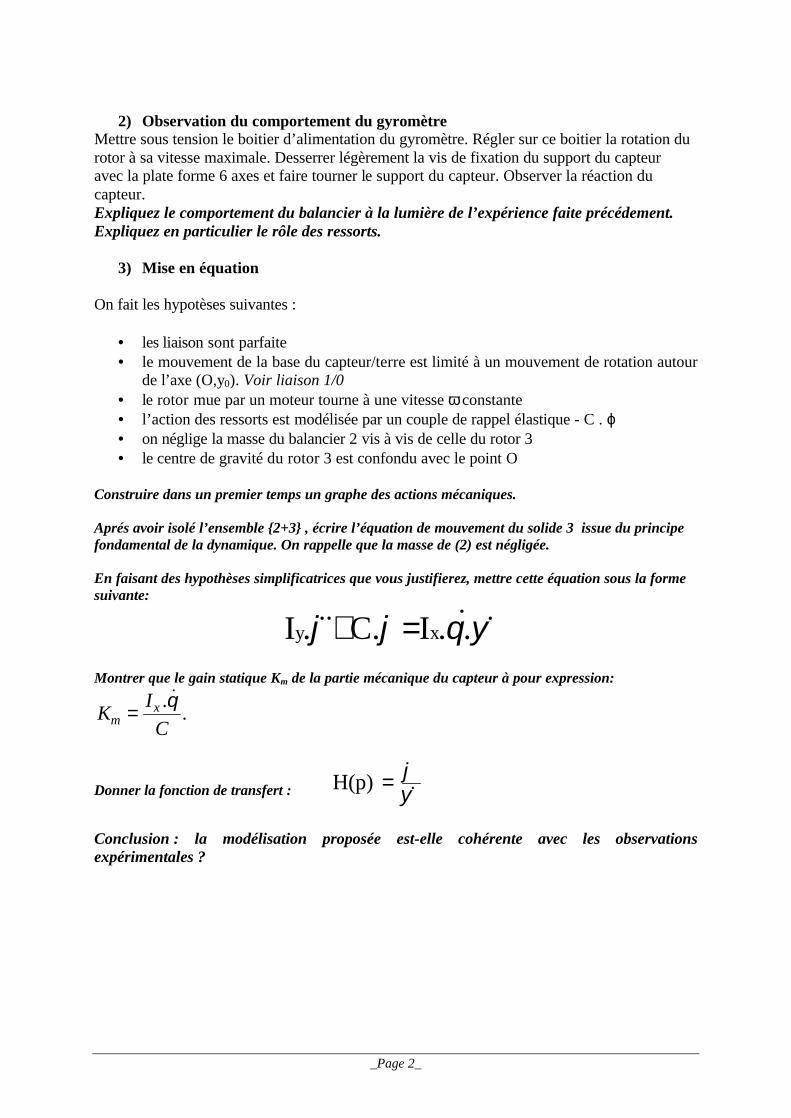
Expérimentation : tenir fermement à deux mains l’axe de la roue de vélo et le maintenir horizontal. Votre camarade fait alors tourner rapidement la roue autour de son axe de rotation. Si vous cherchez à modifier l’orientation de l’axe de la roue tout en le maintenant horizontal vous ressentirez le couple gyroscopique. Sur une figure en perspective, représentez la roue et son axe, le vecteur vitesse de rotation propre de la roue, le vecteur vitesse de rotation de l’axe / terre et le couple gyroscopique ressenti. On respectera le sens des différents vecteurs
Liaison pivot avec raideur et amortissement.
A
O
_Page 2_
2) Observation du comportement du gyromètre
Mettre sous tension le boitier d’alimentation du gyromètre. Régler sur ce boitier la rotation du rotor à sa vitesse maximale. Desserrer légèrement la vis de fixation du support du capteur avec la plate forme 6 axes et faire tourner le support du capteur. Observer la réaction du capteur. Expliquez le comportement du balancier à la lumière de l’expérience faite précédement. Expliquez en particulier le rôle des ressorts.
3) Mise en équation On fait les hypotèses suivantes :
• les liaison sont parfaite • le mouvement de la base du capteur/terre est limité à un mouvement de rotation autour
de l’axe (O,y0). Voir liaison 1/0 • le rotor mue par un moteur tourne à une vitesse ω constante • l’action des ressorts est modélisée par un couple de rappel élastique - C . ϕ • on néglige la masse du balancier 2 vis à vis de celle du rotor 3 • le centre de gravité du rotor 3 est confondu avec le point O
Construire dans un premier temps un graphe des actions mécaniques. Aprés avoir isolé l’ensemble 2+3 , écrire l’équation de mouvement du solide 3 issue du principe fondamental de la dynamique. On rappelle que la masse de (2) est négligée. En faisant des hypothèses simplificatrices que vous justifierez, mettre cette équation sous la forme suivante:
ψθϕϕ &&&& ..I.C.I xy =+
Montrer que le gain statique Km de la partie mécanique du capteur à pour expression:
K ICmx=. &θ
.
Donner la fonction de transfert : ψϕ&=)p(H
Conclusion : la modélisation proposée est-elle cohérente avec les observations expérimentales ?
_Page 3_
ANNEXES Présentation du GYROMETRE : Le gyromètre est un capteur de vitesse de rotation basé sur l’effet gyroscopique. Il mesure la composante du vecteur vitesse de rotation du bâti du capteur 1 par rapport à la terre 0
(référentiel galiléen) suivant la direction yo. On note cette composante : ψ&rr=Ω 0y).Rg/1(
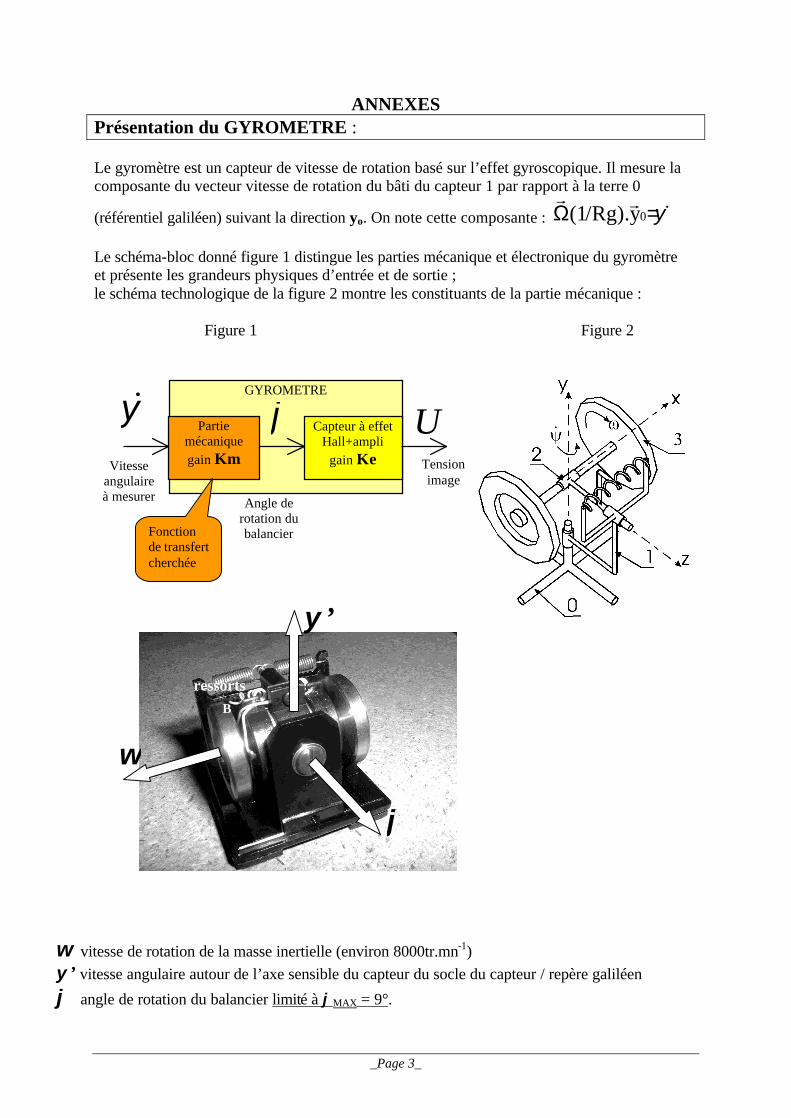
Le schéma-bloc donné figure 1 distingue les parties mécanique et électronique du gyromètre et présente les grandeurs physiques d’entrée et de sortie ; le schéma technologique de la figure 2 montre les constituants de la partie mécanique :
Figure 1 Figure 2
ω vitesse de rotation de la masse inertielle (environ 8000tr.mn-1) ψ’ vitesse angulaire autour de l’axe sensible du capteur du socle du capteur / repère galiléen ϕ angle de rotation du balancier limité à ϕMAX = 9°.
ω
ψ’
ϕ
ressorts B
GYROMETRE
Partie mécanique gain Km
Capteur à effet Hall+ampli
gain Ke
&ψ
ϕ UVitesse
angulaire à mesurer
Tension image
Angle de rotation du balancier Fonction
de transfert cherchée
_Page 4_
Description de la partie mécanique du gyromètre : (voir la figure 2) Le schéma de la partie mécanique du gyromètre (Voir figure 2 ) fait apparaître 4 solides:
0: Solide de référence, immobile par rapport à la terre 1: Support du gyromètre 2: Pièce intermédiaire (masse négligeable) 3: Toupie
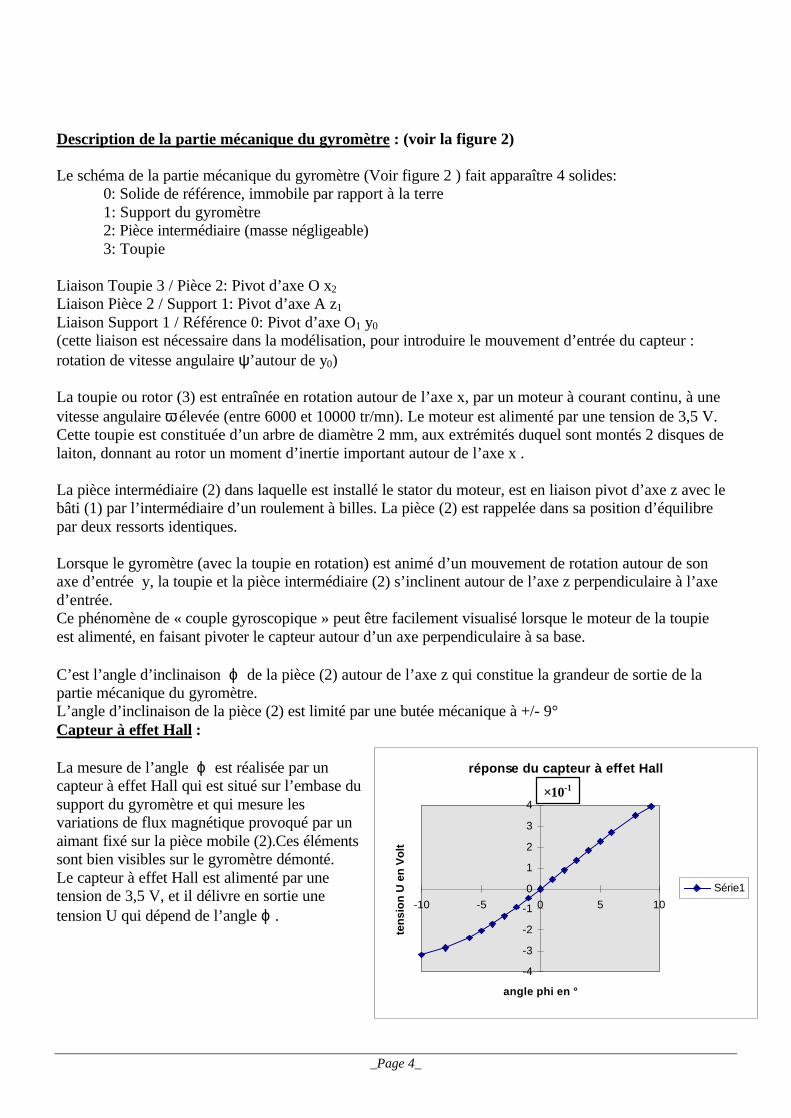
Liaison Toupie 3 / Pièce 2: Pivot d’axe O x2 Liaison Pièce 2 / Support 1: Pivot d’axe A z1 Liaison Support 1 / Référence 0: Pivot d’axe O1 y0 (cette liaison est nécessaire dans la modélisation, pour introduire le mouvement d’entrée du capteur : rotation de vitesse angulaire ψ’autour de y0) La toupie ou rotor (3) est entraînée en rotation autour de l’axe x, par un moteur à courant continu, à une vitesse angulaire ω élevée (entre 6000 et 10000 tr/mn). Le moteur est alimenté par une tension de 3,5 V. Cette toupie est constituée d’un arbre de diamètre 2 mm, aux extrémités duquel sont montés 2 disques de laiton, donnant au rotor un moment d’inertie important autour de l’axe x . La pièce intermédiaire (2) dans laquelle est installé le stator du moteur, est en liaison pivot d’axe z avec le bâti (1) par l’intermédiaire d’un roulement à billes. La pièce (2) est rappelée dans sa position d’équilibre par deux ressorts identiques. Lorsque le gyromètre (avec la toupie en rotation) est animé d’un mouvement de rotation autour de son axe d’entrée y, la toupie et la pièce intermédiaire (2) s’inclinent autour de l’axe z perpendiculaire à l’axe d’entrée. Ce phénomène de « couple gyroscopique » peut être facilement visualisé lorsque le moteur de la toupie est alimenté, en faisant pivoter le capteur autour d’un axe perpendiculaire à sa base. C’est l’angle d’inclinaison ϕ de la pièce (2) autour de l’axe z qui constitue la grandeur de sortie de la partie mécanique du gyromètre. L’angle d’inclinaison de la pièce (2) est limité par une butée mécanique à +/- 9° Capteur à effet Hall : La mesure de l’angle ϕ est réalisée par un capteur à effet Hall qui est situé sur l’embase du support du gyromètre et qui mesure les variations de flux magnétique provoqué par un aimant fixé sur la pièce mobile (2).Ces éléments sont bien visibles sur le gyromètre démonté. Le capteur à effet Hall est alimenté par une tension de 3,5 V, et il délivre en sortie une tension U qui dépend de l’angle ϕ .
réponse du capteur à effet Hall
-4
-3
-2
-1
0
1
2
3
4
-10 -5 0 5 10
angle phi en °
tens
ion
U e
n Vo
lt
Série1
×10-1
_Page 5_
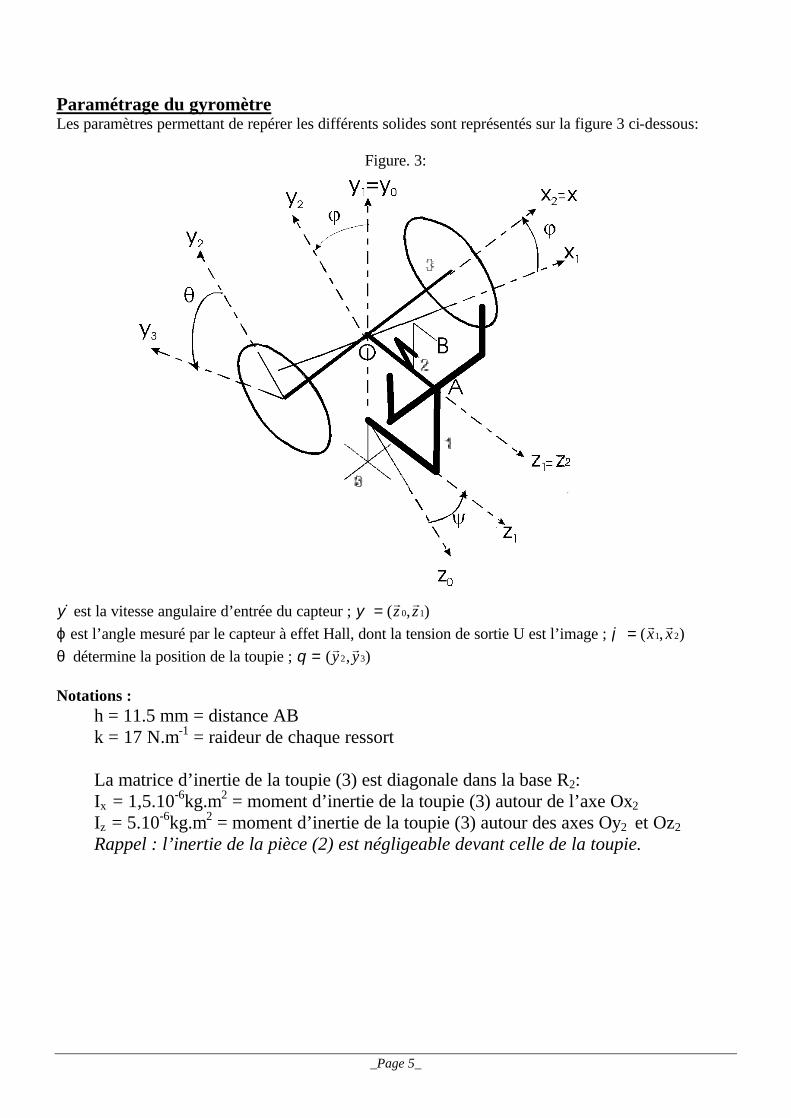
Paramétrage du gyromètre Les paramètres permettant de repérer les différents solides sont représentés sur la figure 3 ci-dessous:
Figure. 3:
&ψ est la vitesse angulaire d’entrée du capteur ; ψ = ( , )r rz z0 1 ϕ est l’angle mesuré par le capteur à effet Hall, dont la tension de sortie U est l’image ; ϕ = ( , )r rx x1 2 θ détermine la position de la toupie ; θ = ( , )r ry y2 3 Notations :
h = 11.5 mm = distance AB k = 17 N.m-1 = raideur de chaque ressort La matrice d’inertie de la toupie (3) est diagonale dans la base R2: Ix = 1,5.10-6kg.m2 = moment d’inertie de la toupie (3) autour de l’axe Ox2 Iz = 5.10-6kg.m2 = moment d’inertie de la toupie (3) autour des axes Oy2 et Oz2 Rappel : l’inertie de la pièce (2) est négligeable devant celle de la toupie.
_Page 6_
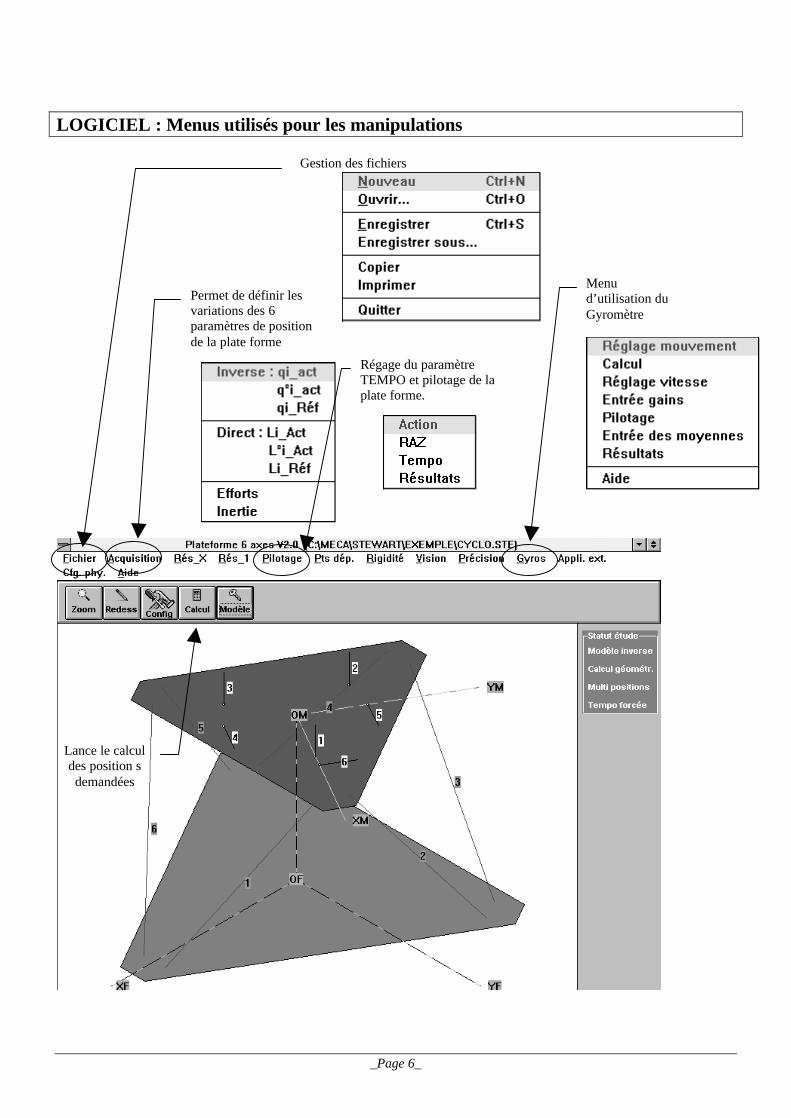
LOGICIEL : Menus utilisés pour les manipulations
Lance le calcul des position s demandées
Permet de définir les variations des 6 paramètres de position de la plate forme
Régage du paramètre TEMPO et pilotage de la plate forme.
Menu d’utilisation du Gyromètre
Gestion des fichiers
_Page 7_
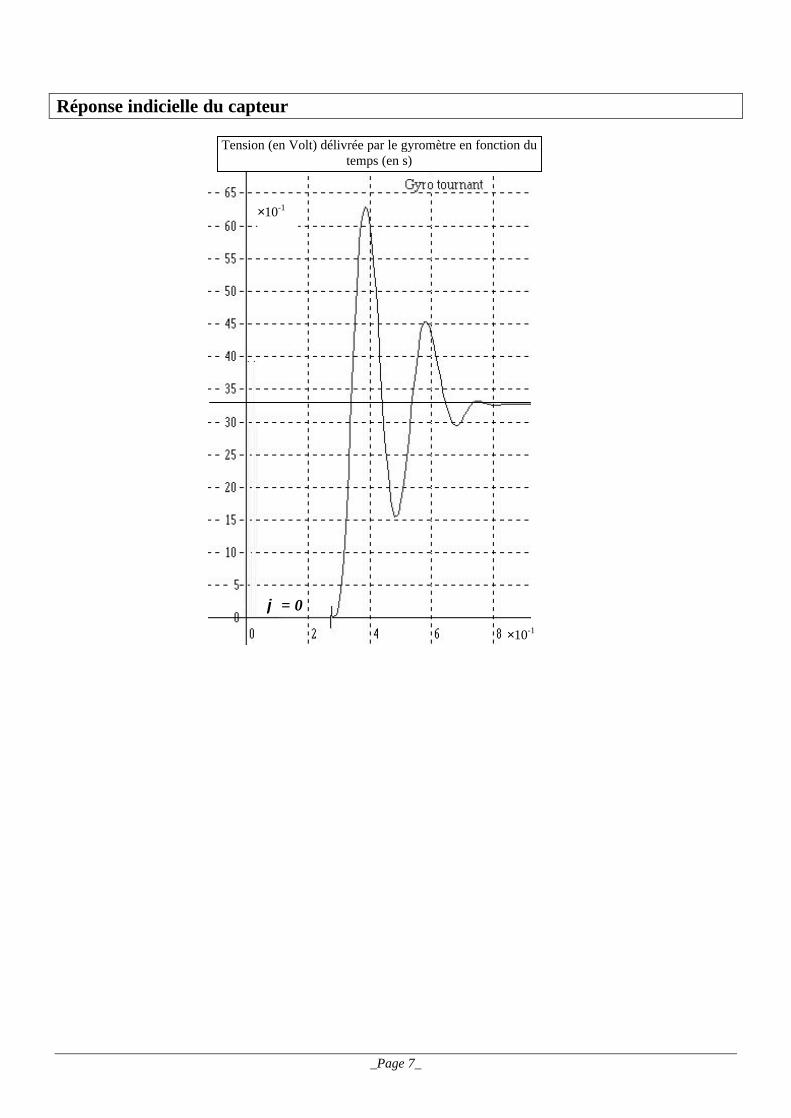
Réponse indicielle du capteur
Tension (en Volt) délivrée par le gyromètre en fonction du temps (en s)
×10-1
×10-1
ϕ = 0





























