Embed Size (px)
Citation preview

Using Nano-wireless Communications in Micro-RobotsApplications
Nicolas BOILLOTInstitut FEMTO-ST∗
UMR CNRS 6174Université de Franche-ComtéCentre National de Recherche
Scientifique (CNRS)25200 Montbéliard, FRANCEnicolas.boillot@femto-
st.fr
Dominique DHOUTAUTInstitut FEMTO-STUMR CNRS 6174
Université de Franche-ComtéCentre National de Recherche
Scientifique (CNRS)1 Cours Leprince-Ringuet
Julien BOURGEOISInstitut FEMTO-STUMR CNRS 6174
Université de Franche-ComtéCentre National de Recherche
Scientifique (CNRS)1 Cours Leprince-Ringuet
ABSTRACTThe emergence of nano-electromagnetic communications ba-sed on graphene nano-antennas has opened new perspec-tives for communications between small things, referred asto the internet of micro-things or even as the internet ofnano-things. However, these antennas make use of the Ter-ahertz band which raises many problems like the absorptionof entire range of the available bandwidth by any molecule.Meanwhile, recent advances have been made in the designand fabrication of micro-robots enabling formation of micro-robots networks. Nano-antennas are an interesting way ofcommunicating between micro-robots. We envision two typesof benefits using integrated nano-antennas in micro-robots.First, nano-wireless communications could enhance exist-ing applications enabling a greater communication distancein an ensemble and broadcasting facilities. Second, nano-wireless communications can create new usage and new ap-plications. This article presents a simulation framework formicro-robots using nano-wireless communications and anapplication being developed within our simulator.
Keywordsnano-wireless communications, simulation, MEMS micro-robots
1. INTRODUCTIONThese last years, different works have opened new perspec-tives for nano-electromagnetic communications. First stud-ies have defined the research challenges and possible applica-tions of nano-communications using carbon nano-tubes [14]
∗This work has been funded by the Labex ACTION pro-gram (contract ANR-11-LABX-01-01) and ANR/RGC (con-tracts ANR-12-IS02-0004-01 and 3-ZG1F) and ANR (con-tract ANR-2011-BS03-005)
or nano-wireless communications [5] while some others havedefined the basis of nano-wireless communications using gra-phene nano-antennas [6]. These works have changed theperspectives for communicating between small things. Theinternet of things (IoT) changed his scale to go micro withthe internet of micro-things [10] or even smaller with theinternet of nano-things [28].
However, these antennas make use of the Terahertz bandwhich raises many problems like the absorption of entireranges of the available bandwidth by interactions with allmolecules [25] or proposing an energy-efficient physical layer[29, 40]. These properties are varying regarding to the en-vironment and the application. Absorption is indeed notthe same if the transmission is made in an open environ-ment composed of air, in a body or inside an ensemble ofmicro-robots. The huge bandwidth of the Terahertz bandoffers many different possibilities for the design of the phys-ical layer and diversity of potential applications will havedifferent needs ranging from multimedia transmission [16,28], micro-robots communications [9], distributed intelligentmicro-electro-mechanical-systems (MEMS) [11, 12], to re-placement of bus for core to memory communications [3].We therefore think that a cross-layer approach is neededin the design of the communication layers of nano-wirelesscommunications.
Recent advances in the field of MEMS, are enabling the de-sign and fabrication of distributed intelligent MEMS (Di-MEMS). A node in a DiMEMS system is basically com-posed of actuators, sensors, a processing unit and commu-nication capabilities, which makes it a micro-robot. It isthe interconnection of these micro-robots that triggers theemergence of a global behavior. All the current projectson DiMEMS systems are using wired or communications bycontact [13, 21]. If nano-antennas are integrated in DiMEMSsystems, it would be an interesting way of communicate be-tween micro-robots. We envision two types of benefits usingintegrated nano-antennas within a micro-robots ensemble.First, nano-wireless communications could enhance exist-ing applications, enabling a greater communication distancein an ensemble as well as broadcasting possibilities. Sec-ond, nano-wireless communications can create new usageand new applications. In a previous work [9], we have stud-
ied the integration of wireless capabilities in micro-robots ofthe Claytronics project, showing the enhancement createdby wireless communications, but nano-wireless communica-tions was out of the scope of this former article.
This article presents a simulation framework for micro-robotsusing nano-wireless communications as well as several appli-cations being developed within this simulator.
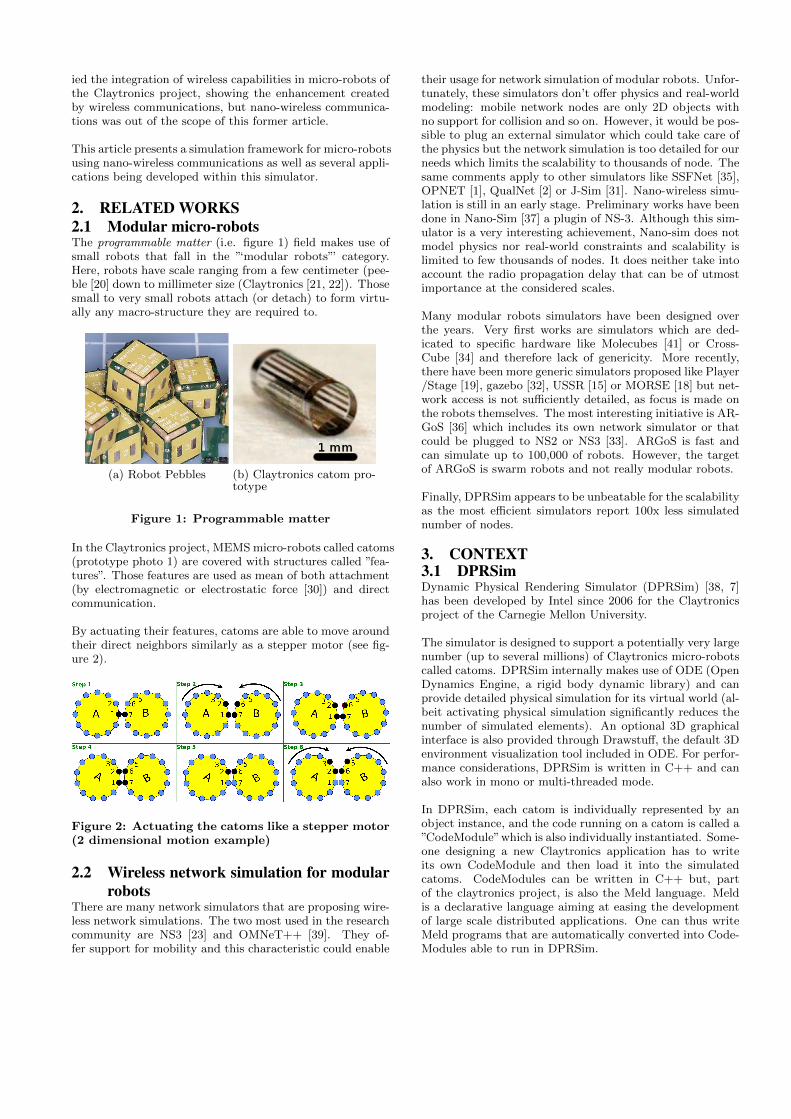
2. RELATED WORKS2.1 Modular micro-robotsThe programmable matter (i.e. figure 1) field makes use ofsmall robots that fall in the ”‘modular robots”’ category.Here, robots have scale ranging from a few centimeter (pee-ble [20] down to millimeter size (Claytronics [21, 22]). Thosesmall to very small robots attach (or detach) to form virtu-ally any macro-structure they are required to.
(a) Robot Pebbles (b) Claytronics catom pro-totype
Figure 1: Programmable matter
In the Claytronics project, MEMS micro-robots called catoms(prototype photo 1) are covered with structures called ”fea-tures”. Those features are used as mean of both attachment(by electromagnetic or electrostatic force [30]) and directcommunication.
By actuating their features, catoms are able to move aroundtheir direct neighbors similarly as a stepper motor (see fig-ure 2).
Figure 2: Actuating the catoms like a stepper motor(2 dimensional motion example)
2.2 Wireless network simulation for modularrobots
There are many network simulators that are proposing wire-less network simulations. The two most used in the researchcommunity are NS3 [23] and OMNeT++ [39]. They of-fer support for mobility and this characteristic could enable
their usage for network simulation of modular robots. Unfor-tunately, these simulators don’t offer physics and real-worldmodeling: mobile network nodes are only 2D objects withno support for collision and so on. However, it would be pos-sible to plug an external simulator which could take care ofthe physics but the network simulation is too detailed for ourneeds which limits the scalability to thousands of node. Thesame comments apply to other simulators like SSFNet [35],OPNET [1], QualNet [2] or J-Sim [31]. Nano-wireless simu-lation is still in an early stage. Preliminary works have beendone in Nano-Sim [37] a plugin of NS-3. Although this sim-ulator is a very interesting achievement, Nano-sim does notmodel physics nor real-world constraints and scalability islimited to few thousands of nodes. It does neither take intoaccount the radio propagation delay that can be of utmostimportance at the considered scales.
Many modular robots simulators have been designed overthe years. Very first works are simulators which are ded-icated to specific hardware like Molecubes [41] or Cross-Cube [34] and therefore lack of genericity. More recently,there have been more generic simulators proposed like Player/Stage [19], gazebo [32], USSR [15] or MORSE [18] but net-work access is not sufficiently detailed, as focus is made onthe robots themselves. The most interesting initiative is AR-GoS [36] which includes its own network simulator or thatcould be plugged to NS2 or NS3 [33]. ARGoS is fast andcan simulate up to 100,000 of robots. However, the targetof ARGoS is swarm robots and not really modular robots.
Finally, DPRSim appears to be unbeatable for the scalabilityas the most efficient simulators report 100x less simulatednumber of nodes.
3. CONTEXT3.1 DPRSimDynamic Physical Rendering Simulator (DPRSim) [38, 7]has been developed by Intel since 2006 for the Claytronicsproject of the Carnegie Mellon University.
The simulator is designed to support a potentially very largenumber (up to several millions) of Claytronics micro-robotscalled catoms. DPRSim internally makes use of ODE (OpenDynamics Engine, a rigid body dynamic library) and canprovide detailed physical simulation for its virtual world (al-beit activating physical simulation significantly reduces thenumber of simulated elements). An optional 3D graphicalinterface is also provided through Drawstuff, the default 3Denvironment visualization tool included in ODE. For perfor-mance considerations, DPRSim is written in C++ and canalso work in mono or multi-threaded mode.
In DPRSim, each catom is individually represented by anobject instance, and the code running on a catom is called a”CodeModule”which is also individually instantiated. Some-one designing a new Claytronics application has to writeits own CodeModule and then load it into the simulatedcatoms. CodeModules can be written in C++ but, partof the claytronics project, is also the Meld language. Meldis a declarative language aiming at easing the developmentof large scale distributed applications. One can thus writeMeld programs that are automatically converted into Code-Modules able to run in DPRSim.

In [9], we expanded DPRSIM by adding a wireless communi-cation capability to the simulated catoms. Allowing wirelesstransmission in such an environment open the path to newarea of thrilling applications. This expansion to DPRSIMhad to integrate well with the inner working of the simulator,especially with the time-division system.
DPRSim uses a time-slicing approach, with an atomic dura-tion step (called a ”tick”), and processes the whole simulationstep by step. A tick is not a divisible duration and this hasmany repercussions, especially on the messaging system.
If activated, the physical simulation (ODE library) uses itsown time-slicing - which is independent but has to be con-figured conjointly with the main DPRSim’s time-slicing.
We developed a new simulator component called ”Vouivre”able to handle the radio channel and the its concurrent ac-cess. Vouivre can be used as a standalone wireless networksimulator, but can also be used as a library in a slightlymodified DPRSIM or other network simulator. Vouivre isdiscrete-event based, and proposes an adaptable tradeoff be-tween complexity and realism of the network. Going for mil-lions of nodes sharing a medium is not possible at this time,but it is still possible to tune it to go largely over the fewthousands most dedicated and detailed network simulatorscan do.
To link DPRSim with our new network simulator, 3 majorschanges have been brought to DPRSim:
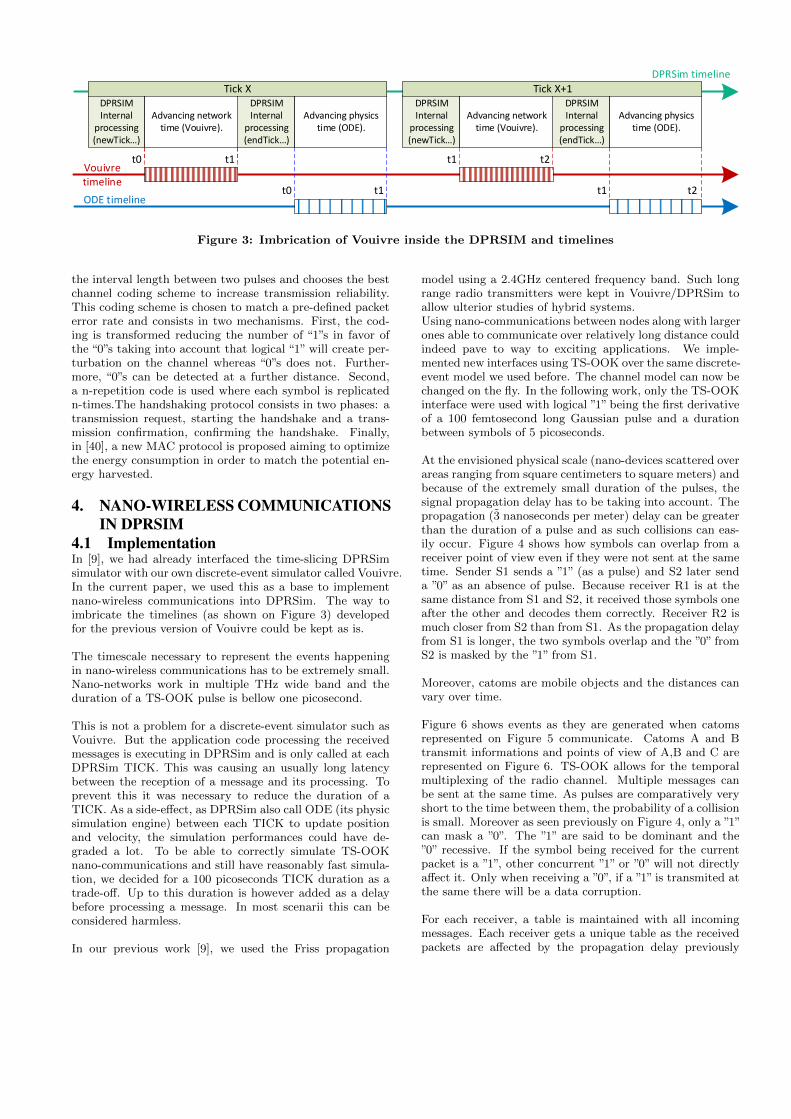
The first one and most important for the work later pre-sented in this paper is to invoke at each Tick, a progression ofthe simulated network time (see figure 3). From the point ofview of Vouivre, the duration of a DPRSim’s tick is definedas constant. It is important to configure this time jumpingduration to be the same as the duration of the intra-tick timeinterval defined for the physics engine ODE. Consequently,in the figure 3, the duration between t0 and t1 is the samefor Vouivre and ODE. Failing to do so, the network timewould flow slower or faster than the physics time and thedata rates of network interfaces would not have sense any-more. During each tick processing, DPRSim lets Vouivreprocess the discrete events which have been scheduled forthis time interval. From a different perspective, we shouldconsider that the network simulation is periodically stalledto allow DPRSim to simulate CodeModules of catoms andto allow ODE to simulate physics.
The second change was to deactivate the previous algorithmdedicated to communications on wired interfaces. The ex-isting mailbox system of DPRSim has still been preservedto keep compatibility with already existing CodeModulesand Meld applications. To avoid the synchronism barrier in-duced by the time-slicing operating mode, the existing mail-box callback system have to be used in ”live mode” insteadof ”delayed” mode. This allows for multiple small messagesto be exchanged back and forth during the same DPRSimtick. A new type of interface has been added, as the Wire-lessNetworkAdapter, which enables access to a shared ra-dio channel. NetworkAdapters corresponding to the normalwired interfaces have also been modified to be managed byour network simulator. allowing simulations of wired com-
munication over shared mediums such as wired buses.
The last important change is a mapping between DPRSimstructures representing catoms and the corresponding Vouivrenetwork nodes. Each network node can have several networkinterfaces. They can be wired or wireless interfaces. Thismapping is build at the creation of the DPRSim simulationuniverse called ”CatomWorld”.
3.2 Nano-wireless communicationsThe first idea of nano-wireless communications was pre-sented in [5]. This article defines the different kinds ofnanonetworks media (nanomechanical, acoustic, electromag-netic and chemical or molecular) and defines the nanoma-chines in a similar way to Berlin in [8] but extended it to abio-hybrid approach. In this article, the molecular commu-nication is preferred to as the electromagnetic one. In fol-lowing articles, Jornet, Akyildiz and al. present the conceptof CNT-based nano-antennas in [27] together with a first at-tempt to define its characteristics [4]. In [24], a model of thepath loss is proposed using HIgh resolution TRANsmissionmolecular absorption database (HITRAN). HITRAN mea-sure the absorption electro-magnetic radiation for differentfrequencies transmitted in different gas. Started in the 60s,with only seven gas in the infrared, they have now a widerange of gas and frequencies. The different molecules ab-sorb the transmitted frequencies in discrete fashion whichmeans that each absorption can be calculated in isolation ofthe rest. The total absorption can therefore be computedas the sum of absorption of the different molecules presenton the transmission path. The noise, in the terahertz band,is mainly introduced by the molecular noise created by theabsorption of the signal which is, in turn, exciting molecules.That is why short pulses should be preferred for transmit-ting information. These conclusions are confirmed and moredetailed in [25]. In the mean time, the idea of nano-wirelesssensor networks is investigated in [6] giving a first view ofpossible hardware and potential applications. Given thatshort pulses would give better results, a new communica-tion scheme called Time Spread On-Off Keying (TS-OOK)is introduced in [26]. TS-OOK uses very short pulses in therange of femtoseconds where each pulse transmits a “1” andthe absence of pulse transmits a “0” which is called on-offkeying. Pulses have to be transmitted using a period of timemuch bigger than the duration of a pulse. This ensure anefficient medium sharing as well as reducing the possible in-terferences and noise creation. It has to be noted that thetransmission of “0” has to be preferred to “1” as it does notcreate any perturbation of the channel and it is also pos-sible to detect it at a greater distance. Two ameliorationof TS-OOK are proposed. First, using a low-weight chan-nel coding allows to reduce the influence of interference be-tween concurrent transmissions leading to better aggregatedbandwidth [26]. Second, Rate Division TS-OOK is proposedin [29] where the time interval between pulses can vary be-tween transmitters. This is done to avoid series of collisionsbetween two nodes. Indeed, in TS-OOK as the interval isa pre-determined fixed value, if two nodes are emitting atthe same time, all their transmissions would in collision. To-gether with RD TS-OOk, a medium access control (MAC)is proposed. PHysical Layer MAC Protocol for Electromag-netic nanonetworks (PHLAME) main proposition is a hand-shaking protocol which allows multiple receptions, defines
DPRSIMInternal
processing (newTick…)
DPRSIMInternal
processing (endTick…)
Advancing network time (Vouivre).
Advancing physics time (ODE).
Tick XDPRSIMInternal
processing (newTick…)
DPRSIMInternal
processing (endTick…)
Advancing network time (Vouivre).
Advancing physics time (ODE).
Tick X+1
DPRSim timeline
Vouivretimeline
ODE timeline
t0
t0
t1
t1 t1
t2
t2
t1
Figure 3: Imbrication of Vouivre inside the DPRSIM and timelines
the interval length between two pulses and chooses the bestchannel coding scheme to increase transmission reliability.This coding scheme is chosen to match a pre-defined packeterror rate and consists in two mechanisms. First, the cod-ing is transformed reducing the number of “1”s in favor ofthe “0”s taking into account that logical “1” will create per-turbation on the channel whereas “0”s does not. Further-more, “0”s can be detected at a further distance. Second,a n-repetition code is used where each symbol is replicatedn-times.The handshaking protocol consists in two phases: atransmission request, starting the handshake and a trans-mission confirmation, confirming the handshake. Finally,in [40], a new MAC protocol is proposed aiming to optimizethe energy consumption in order to match the potential en-ergy harvested.
4. NANO-WIRELESS COMMUNICATIONSIN DPRSIM
4.1 ImplementationIn [9], we had already interfaced the time-slicing DPRSimsimulator with our own discrete-event simulator called Vouivre.In the current paper, we used this as a base to implementnano-wireless communications into DPRSim. The way toimbricate the timelines (as shown on Figure 3) developedfor the previous version of Vouivre could be kept as is.
The timescale necessary to represent the events happeningin nano-wireless communications has to be extremely small.Nano-networks work in multiple THz wide band and theduration of a TS-OOK pulse is bellow one picosecond.
This is not a problem for a discrete-event simulator such asVouivre. But the application code processing the receivedmessages is executing in DPRSim and is only called at eachDPRSim TICK. This was causing an usually long latencybetween the reception of a message and its processing. Toprevent this it was necessary to reduce the duration of aTICK. As a side-effect, as DPRSim also call ODE (its physicsimulation engine) between each TICK to update positionand velocity, the simulation performances could have de-graded a lot. To be able to correctly simulate TS-OOKnano-communications and still have reasonably fast simula-tion, we decided for a 100 picoseconds TICK duration as atrade-off. Up to this duration is however added as a delaybefore processing a message. In most scenarii this can beconsidered harmless.
In our previous work [9], we used the Friss propagation
model using a 2.4GHz centered frequency band. Such longrange radio transmitters were kept in Vouivre/DPRSim toallow ulterior studies of hybrid systems.Using nano-communications between nodes along with largerones able to communicate over relatively long distance couldindeed pave to way to exciting applications. We imple-mented new interfaces using TS-OOK over the same discrete-event model we used before. The channel model can now bechanged on the fly. In the following work, only the TS-OOKinterface were used with logical ”1” being the first derivativeof a 100 femtosecond long Gaussian pulse and a durationbetween symbols of 5 picoseconds.
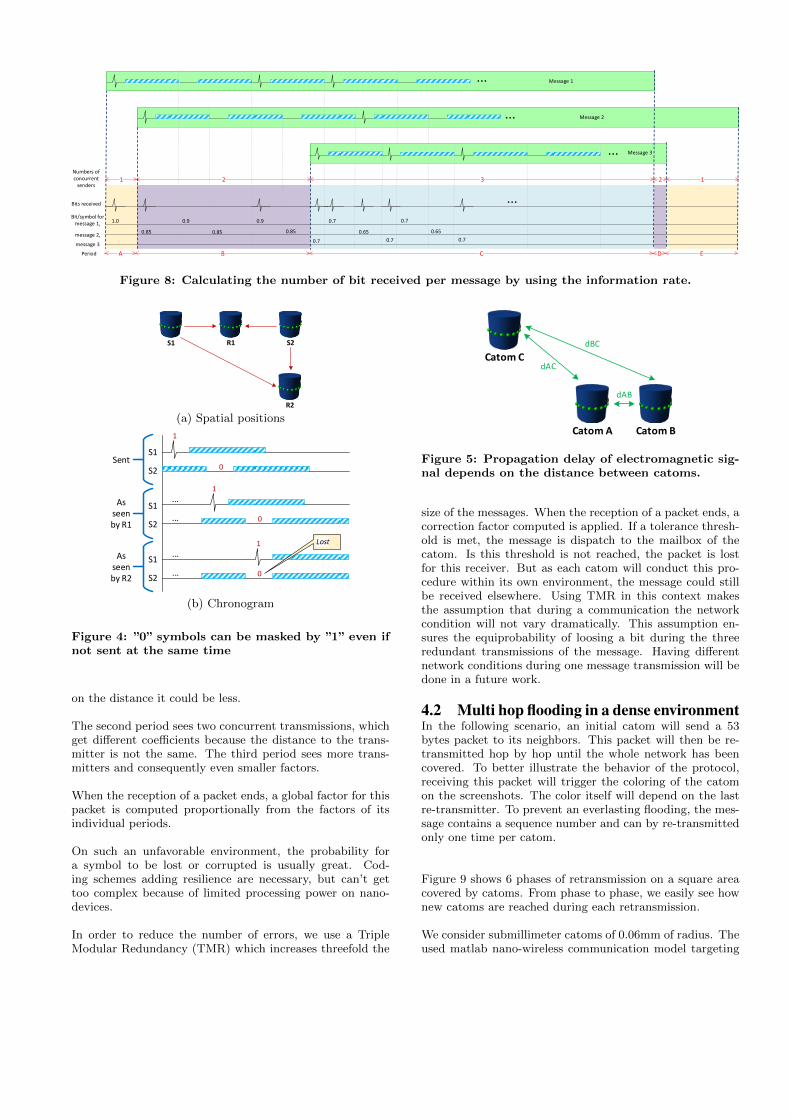
At the envisioned physical scale (nano-devices scattered overareas ranging from square centimeters to square meters) andbecause of the extremely small duration of the pulses, thesignal propagation delay has to be taking into account. Thepropagation (3 nanoseconds per meter) delay can be greaterthan the duration of a pulse and as such collisions can eas-ily occur. Figure 4 shows how symbols can overlap from areceiver point of view even if they were not sent at the sametime. Sender S1 sends a ”1” (as a pulse) and S2 later senda ”0” as an absence of pulse. Because receiver R1 is at thesame distance from S1 and S2, it received those symbols oneafter the other and decodes them correctly. Receiver R2 ismuch closer from S2 than from S1. As the propagation delayfrom S1 is longer, the two symbols overlap and the ”0” fromS2 is masked by the ”1” from S1.
Moreover, catoms are mobile objects and the distances canvary over time.
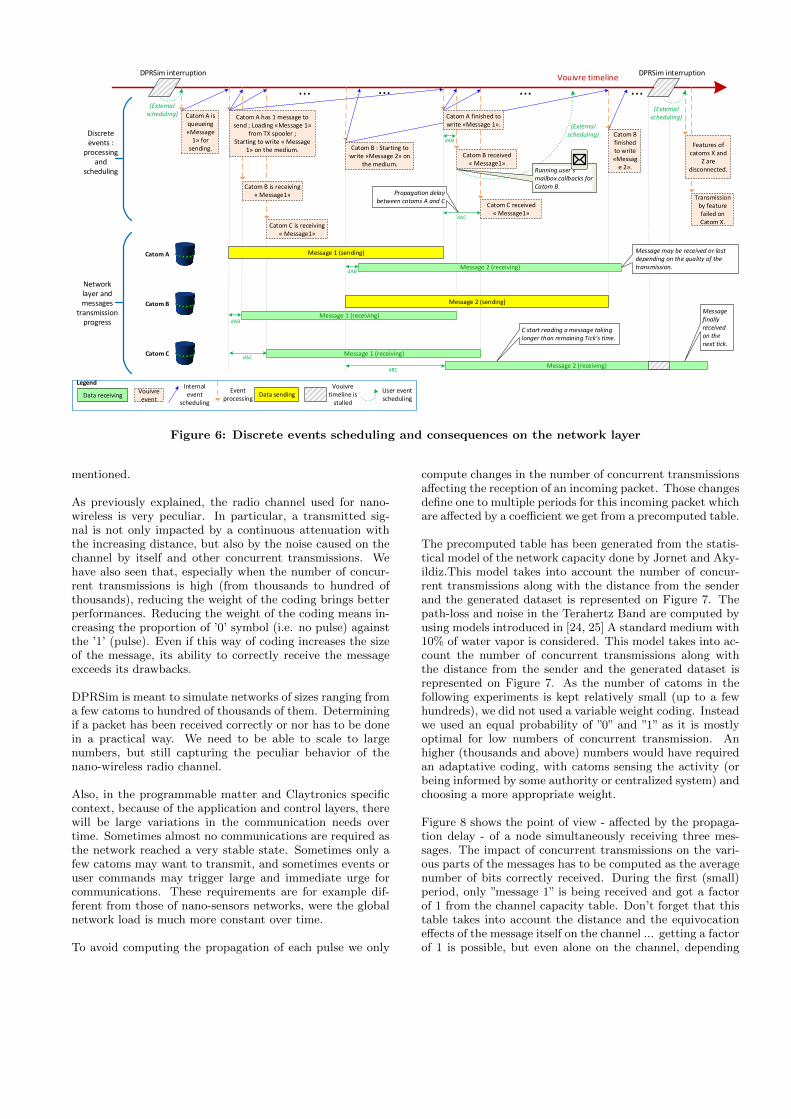
Figure 6 shows events as they are generated when catomsrepresented on Figure 5 communicate. Catoms A and Btransmit informations and points of view of A,B and C arerepresented on Figure 6. TS-OOK allows for the temporalmultiplexing of the radio channel. Multiple messages canbe sent at the same time. As pulses are comparatively veryshort to the time between them, the probability of a collisionis small. Moreover as seen previously on Figure 4, only a ”1”can mask a ”0”. The ”1” are said to be dominant and the”0” recessive. If the symbol being received for the currentpacket is a ”1”, other concurrent ”1” or ”0” will not directlyaffect it. Only when receiving a ”0”, if a ”1” is transmited atthe same there will be a data corruption.
For each receiver, a table is maintained with all incomingmessages. Each receiver gets a unique table as the receivedpackets are affected by the propagation delay previously
Catom B : Starting to write «Message 2» on
the medium.
Vouivre timelineDPRSim interruption
Catom A is queueing «Message
1» for sending.
DPRSim interruption
(External scheduling)
(External scheduling)
C start reading a message taking longer than remaining Tick’s time.
Message finally received on the next tick.
Message may be received or lost depending on the quality of the transmission.
Transmission by feature failed on Catom X.
(External scheduling)
Running user’s mailbox callbacks for Catom B.
Discrete events :
processing and
scheduling
Network layer andmessages
transmission progress
Message 1 (receiving)
Message 1 (sending)
Catom A has 1 message to send ; Loading «Message 1»
from TX spooler ;Starting to write « Message
1» on the medium.
Catom B is receiving « Message1»
Catom A finished to write «Message 1».
... ...
Propagation delay between catoms A and C
Features of catoms X and
Z are disconnected.
Catom C is receiving « Message1»
Catom C
Catom B
Catom A
Message 2 (sending)
Message 1 (receiving)
Catom B received « Message1»
Catom C received « Message1»
Catom B finished to write «Messag
e 2».
...
Message 2 (receiving)
Message 2 (receiving)
...
dAB
dAB
dAB
dAC
dAC
dBC
Legend
Vouivre event
Internal event
scheduling
Event processing
Data sendingVouivre
timeline is stalled
User event schedulingData receiving
Figure 6: Discrete events scheduling and consequences on the network layer
mentioned.
As previously explained, the radio channel used for nano-wireless is very peculiar. In particular, a transmitted sig-nal is not only impacted by a continuous attenuation withthe increasing distance, but also by the noise caused on thechannel by itself and other concurrent transmissions. Wehave also seen that, especially when the number of concur-rent transmissions is high (from thousands to hundred ofthousands), reducing the weight of the coding brings betterperformances. Reducing the weight of the coding means in-creasing the proportion of ’0’ symbol (i.e. no pulse) againstthe ’1’ (pulse). Even if this way of coding increases the sizeof the message, its ability to correctly receive the messageexceeds its drawbacks.
DPRSim is meant to simulate networks of sizes ranging froma few catoms to hundred of thousands of them. Determiningif a packet has been received correctly or nor has to be donein a practical way. We need to be able to scale to largenumbers, but still capturing the peculiar behavior of thenano-wireless radio channel.
Also, in the programmable matter and Claytronics specificcontext, because of the application and control layers, therewill be large variations in the communication needs overtime. Sometimes almost no communications are required asthe network reached a very stable state. Sometimes only afew catoms may want to transmit, and sometimes events oruser commands may trigger large and immediate urge forcommunications. These requirements are for example dif-ferent from those of nano-sensors networks, were the globalnetwork load is much more constant over time.
To avoid computing the propagation of each pulse we only
compute changes in the number of concurrent transmissionsaffecting the reception of an incoming packet. Those changesdefine one to multiple periods for this incoming packet whichare affected by a coefficient we get from a precomputed table.
The precomputed table has been generated from the statis-tical model of the network capacity done by Jornet and Aky-ildiz.This model takes into account the number of concur-rent transmissions along with the distance from the senderand the generated dataset is represented on Figure 7. Thepath-loss and noise in the Terahertz Band are computed byusing models introduced in [24, 25] A standard medium with10% of water vapor is considered. This model takes into ac-count the number of concurrent transmissions along withthe distance from the sender and the generated dataset isrepresented on Figure 7. As the number of catoms in thefollowing experiments is kept relatively small (up to a fewhundreds), we did not used a variable weight coding. Insteadwe used an equal probability of ”0” and ”1” as it is mostlyoptimal for low numbers of concurrent transmission. Anhigher (thousands and above) numbers would have requiredan adaptative coding, with catoms sensing the activity (orbeing informed by some authority or centralized system) andchoosing a more appropriate weight.
Figure 8 shows the point of view - affected by the propaga-tion delay - of a node simultaneously receiving three mes-sages. The impact of concurrent transmissions on the vari-ous parts of the messages has to be computed as the averagenumber of bits correctly received. During the first (small)period, only ”message 1” is being received and got a factorof 1 from the channel capacity table. Don’t forget that thistable takes into account the distance and the equivocationeffects of the message itself on the channel ... getting a factorof 1 is possible, but even alone on the channel, depending
... Message 1
Message 2...
Message 3...
1 2 3 2 1
...
1.0 0.9 0.9 0.7 0.7
0.7 0.7 0.7
0.85 0.85 0.65 0.65
Bit/symbol for message 1,
Bits received
Numbers of concurrent
senders
message 2,
message 3
0.85
A B C D EPeriod
Figure 8: Calculating the number of bit received per message by using the information rate.
R2
S1
dBC
R1 S2
(a) Spatial positions
S1
S2
S1
S2
S1
S2
Sent
As seen by R1
As seen by R2
Lost
...
...
...
...
1
0
1
1
0
0
(b) Chronogram
Figure 4: ”0” symbols can be masked by ”1” even ifnot sent at the same time
on the distance it could be less.
The second period sees two concurrent transmissions, whichget different coefficients because the distance to the trans-mitter is not the same. The third period sees more trans-mitters and consequently even smaller factors.
When the reception of a packet ends, a global factor for thispacket is computed proportionally from the factors of itsindividual periods.
On such an unfavorable environment, the probability fora symbol to be lost or corrupted is usually great. Cod-ing schemes adding resilience are necessary, but can’t gettoo complex because of limited processing power on nano-devices.
In order to reduce the number of errors, we use a TripleModular Redundancy (TMR) which increases threefold the
dAB
dAC
dBC
Catom A Catom B
Catom C
Figure 5: Propagation delay of electromagnetic sig-nal depends on the distance between catoms.
size of the messages. When the reception of a packet ends, acorrection factor computed is applied. If a tolerance thresh-old is met, the message is dispatch to the mailbox of thecatom. Is this threshold is not reached, the packet is lostfor this receiver. But as each catom will conduct this pro-cedure within its own environment, the message could stillbe received elsewhere. Using TMR in this context makesthe assumption that during a communication the networkcondition will not vary dramatically. This assumption en-sures the equiprobability of loosing a bit during the threeredundant transmissions of the message. Having differentnetwork conditions during one message transmission will bedone in a future work.
4.2 Multi hop flooding in a dense environmentIn the following scenario, an initial catom will send a 53bytes packet to its neighbors. This packet will then be re-transmitted hop by hop until the whole network has beencovered. To better illustrate the behavior of the protocol,receiving this packet will trigger the coloring of the catomon the screenshots. The color itself will depend on the lastre-transmitter. To prevent an everlasting flooding, the mes-sage contains a sequence number and can by re-transmittedonly one time per catom.
Figure 9 shows 6 phases of retransmission on a square areacovered by catoms. From phase to phase, we easily see hownew catoms are reached during each retransmission.
We consider submillimeter catoms of 0.06mm of radius. Theused matlab nano-wireless communication model targeting
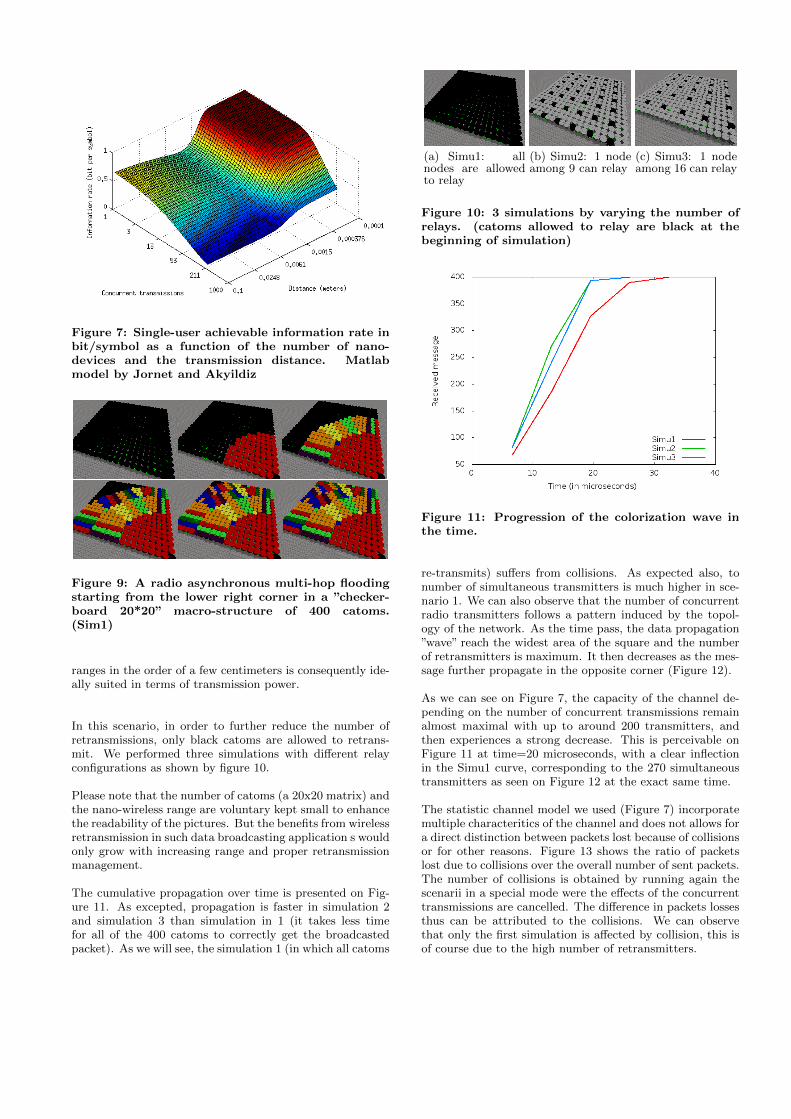
Figure 7: Single-user achievable information rate inbit/symbol as a function of the number of nano-devices and the transmission distance. Matlabmodel by Jornet and Akyildiz
Figure 9: A radio asynchronous multi-hop floodingstarting from the lower right corner in a ”checker-board 20*20” macro-structure of 400 catoms.(Sim1)
ranges in the order of a few centimeters is consequently ide-ally suited in terms of transmission power.
In this scenario, in order to further reduce the number ofretransmissions, only black catoms are allowed to retrans-mit. We performed three simulations with different relayconfigurations as shown by figure 10.
Please note that the number of catoms (a 20x20 matrix) andthe nano-wireless range are voluntary kept small to enhancethe readability of the pictures. But the benefits from wirelessretransmission in such data broadcasting application s wouldonly grow with increasing range and proper retransmissionmanagement.
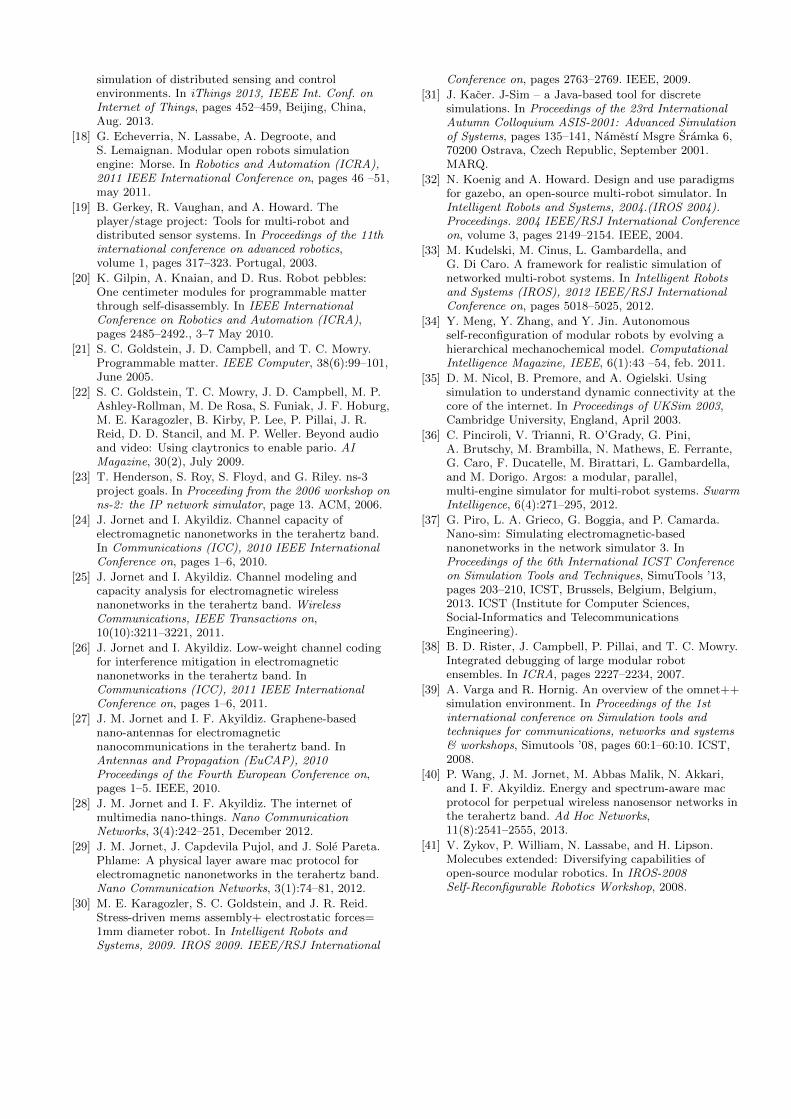
The cumulative propagation over time is presented on Fig-ure 11. As excepted, propagation is faster in simulation 2and simulation 3 than simulation in 1 (it takes less timefor all of the 400 catoms to correctly get the broadcastedpacket). As we will see, the simulation 1 (in which all catoms
(a) Simu1: allnodes are allowedto relay
(b) Simu2: 1 nodeamong 9 can relay
(c) Simu3: 1 nodeamong 16 can relay
Figure 10: 3 simulations by varying the number ofrelays. (catoms allowed to relay are black at thebeginning of simulation)
Figure 11: Progression of the colorization wave inthe time.
re-transmits) suffers from collisions. As expected also, tonumber of simultaneous transmitters is much higher in sce-nario 1. We can also observe that the number of concurrentradio transmitters follows a pattern induced by the topol-ogy of the network. As the time pass, the data propagation”wave” reach the widest area of the square and the numberof retransmitters is maximum. It then decreases as the mes-sage further propagate in the opposite corner (Figure 12).
As we can see on Figure 7, the capacity of the channel de-pending on the number of concurrent transmissions remainalmost maximal with up to around 200 transmitters, andthen experiences a strong decrease. This is perceivable onFigure 11 at time=20 microseconds, with a clear inflectionin the Simu1 curve, corresponding to the 270 simultaneoustransmitters as seen on Figure 12 at the exact same time.
The statistic channel model we used (Figure 7) incorporatemultiple characteritics of the channel and does not allows fora direct distinction between packets lost because of collisionsor for other reasons. Figure 13 shows the ratio of packetslost due to collisions over the overall number of sent packets.The number of collisions is obtained by running again thescenarii in a special mode were the effects of the concurrenttransmissions are cancelled. The difference in packets lossesthus can be attributed to the collisions. We can observethat only the first simulation is affected by collision, this isof course due to the high number of retransmitters.
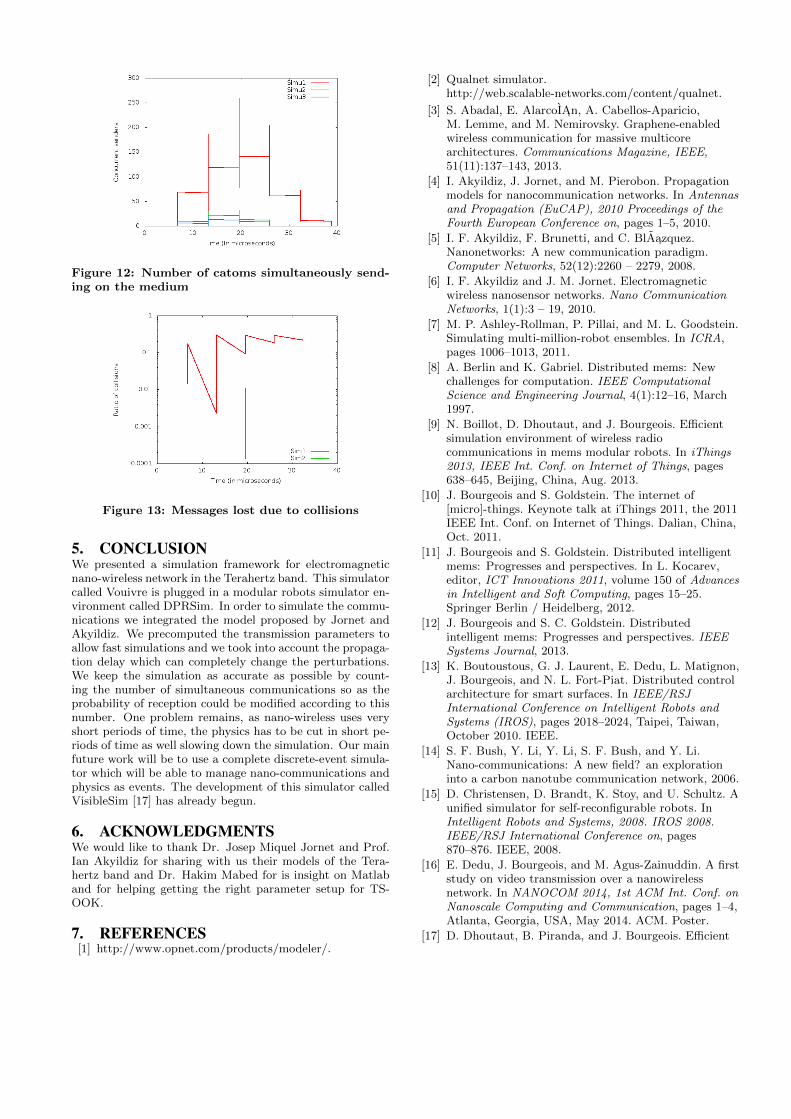
Figure 12: Number of catoms simultaneously send-ing on the medium
Figure 13: Messages lost due to collisions
5. CONCLUSIONWe presented a simulation framework for electromagneticnano-wireless network in the Terahertz band. This simulatorcalled Vouivre is plugged in a modular robots simulator en-vironment called DPRSim. In order to simulate the commu-nications we integrated the model proposed by Jornet andAkyildiz. We precomputed the transmission parameters toallow fast simulations and we took into account the propaga-tion delay which can completely change the perturbations.We keep the simulation as accurate as possible by count-ing the number of simultaneous communications so as theprobability of reception could be modified according to thisnumber. One problem remains, as nano-wireless uses veryshort periods of time, the physics has to be cut in short pe-riods of time as well slowing down the simulation. Our mainfuture work will be to use a complete discrete-event simula-tor which will be able to manage nano-communications andphysics as events. The development of this simulator calledVisibleSim [17] has already begun.
6. ACKNOWLEDGMENTSWe would like to thank Dr. Josep Miquel Jornet and Prof.Ian Akyildiz for sharing with us their models of the Tera-hertz band and Dr. Hakim Mabed for is insight on Matlaband for helping getting the right parameter setup for TS-OOK.
7. REFERENCES[1] http://www.opnet.com/products/modeler/.
[2] Qualnet simulator.http://web.scalable-networks.com/content/qualnet.
[3] S. Abadal, E. AlarcoI ↪An, A. Cabellos-Aparicio,M. Lemme, and M. Nemirovsky. Graphene-enabledwireless communication for massive multicorearchitectures. Communications Magazine, IEEE,51(11):137–143, 2013.
[4] I. Akyildiz, J. Jornet, and M. Pierobon. Propagationmodels for nanocommunication networks. In Antennasand Propagation (EuCAP), 2010 Proceedings of theFourth European Conference on, pages 1–5, 2010.
[5] I. F. Akyildiz, F. Brunetti, and C. BlA ↪azquez.Nanonetworks: A new communication paradigm.Computer Networks, 52(12):2260 – 2279, 2008.
[6] I. F. Akyildiz and J. M. Jornet. Electromagneticwireless nanosensor networks. Nano CommunicationNetworks, 1(1):3 – 19, 2010.
[7] M. P. Ashley-Rollman, P. Pillai, and M. L. Goodstein.Simulating multi-million-robot ensembles. In ICRA,pages 1006–1013, 2011.
[8] A. Berlin and K. Gabriel. Distributed mems: Newchallenges for computation. IEEE ComputationalScience and Engineering Journal, 4(1):12–16, March1997.
[9] N. Boillot, D. Dhoutaut, and J. Bourgeois. Efficientsimulation environment of wireless radiocommunications in mems modular robots. In iThings2013, IEEE Int. Conf. on Internet of Things, pages638–645, Beijing, China, Aug. 2013.
[10] J. Bourgeois and S. Goldstein. The internet of[micro]-things. Keynote talk at iThings 2011, the 2011IEEE Int. Conf. on Internet of Things. Dalian, China,Oct. 2011.
[11] J. Bourgeois and S. Goldstein. Distributed intelligentmems: Progresses and perspectives. In L. Kocarev,editor, ICT Innovations 2011, volume 150 of Advancesin Intelligent and Soft Computing, pages 15–25.Springer Berlin / Heidelberg, 2012.
[12] J. Bourgeois and S. C. Goldstein. Distributedintelligent mems: Progresses and perspectives. IEEESystems Journal, 2013.
[13] K. Boutoustous, G. J. Laurent, E. Dedu, L. Matignon,J. Bourgeois, and N. L. Fort-Piat. Distributed controlarchitecture for smart surfaces. In IEEE/RSJInternational Conference on Intelligent Robots andSystems (IROS), pages 2018–2024, Taipei, Taiwan,October 2010. IEEE.
[14] S. F. Bush, Y. Li, Y. Li, S. F. Bush, and Y. Li.Nano-communications: A new field? an explorationinto a carbon nanotube communication network, 2006.
[15] D. Christensen, D. Brandt, K. Stoy, and U. Schultz. Aunified simulator for self-reconfigurable robots. InIntelligent Robots and Systems, 2008. IROS 2008.IEEE/RSJ International Conference on, pages870–876. IEEE, 2008.
[16] E. Dedu, J. Bourgeois, and M. Agus-Zainuddin. A firststudy on video transmission over a nanowirelessnetwork. In NANOCOM 2014, 1st ACM Int. Conf. onNanoscale Computing and Communication, pages 1–4,Atlanta, Georgia, USA, May 2014. ACM. Poster.
[17] D. Dhoutaut, B. Piranda, and J. Bourgeois. Efficient
simulation of distributed sensing and controlenvironments. In iThings 2013, IEEE Int. Conf. onInternet of Things, pages 452–459, Beijing, China,Aug. 2013.
[18] G. Echeverria, N. Lassabe, A. Degroote, andS. Lemaignan. Modular open robots simulationengine: Morse. In Robotics and Automation (ICRA),2011 IEEE International Conference on, pages 46 –51,may 2011.
[19] B. Gerkey, R. Vaughan, and A. Howard. Theplayer/stage project: Tools for multi-robot anddistributed sensor systems. In Proceedings of the 11thinternational conference on advanced robotics,volume 1, pages 317–323. Portugal, 2003.
[20] K. Gilpin, A. Knaian, and D. Rus. Robot pebbles:One centimeter modules for programmable matterthrough self-disassembly. In IEEE InternationalConference on Robotics and Automation (ICRA),pages 2485–2492., 3–7 May 2010.
[21] S. C. Goldstein, J. D. Campbell, and T. C. Mowry.Programmable matter. IEEE Computer, 38(6):99–101,June 2005.
[22] S. C. Goldstein, T. C. Mowry, J. D. Campbell, M. P.Ashley-Rollman, M. De Rosa, S. Funiak, J. F. Hoburg,M. E. Karagozler, B. Kirby, P. Lee, P. Pillai, J. R.Reid, D. D. Stancil, and M. P. Weller. Beyond audioand video: Using claytronics to enable pario. AIMagazine, 30(2), July 2009.
[23] T. Henderson, S. Roy, S. Floyd, and G. Riley. ns-3project goals. In Proceeding from the 2006 workshop onns-2: the IP network simulator, page 13. ACM, 2006.
[24] J. Jornet and I. Akyildiz. Channel capacity ofelectromagnetic nanonetworks in the terahertz band.In Communications (ICC), 2010 IEEE InternationalConference on, pages 1–6, 2010.
[25] J. Jornet and I. Akyildiz. Channel modeling andcapacity analysis for electromagnetic wirelessnanonetworks in the terahertz band. WirelessCommunications, IEEE Transactions on,10(10):3211–3221, 2011.
[26] J. Jornet and I. Akyildiz. Low-weight channel codingfor interference mitigation in electromagneticnanonetworks in the terahertz band. InCommunications (ICC), 2011 IEEE InternationalConference on, pages 1–6, 2011.
[27] J. M. Jornet and I. F. Akyildiz. Graphene-basednano-antennas for electromagneticnanocommunications in the terahertz band. InAntennas and Propagation (EuCAP), 2010Proceedings of the Fourth European Conference on,pages 1–5. IEEE, 2010.
[28] J. M. Jornet and I. F. Akyildiz. The internet ofmultimedia nano-things. Nano CommunicationNetworks, 3(4):242–251, December 2012.
[29] J. M. Jornet, J. Capdevila Pujol, and J. Sole Pareta.Phlame: A physical layer aware mac protocol forelectromagnetic nanonetworks in the terahertz band.Nano Communication Networks, 3(1):74–81, 2012.
[30] M. E. Karagozler, S. C. Goldstein, and J. R. Reid.Stress-driven mems assembly+ electrostatic forces=1mm diameter robot. In Intelligent Robots andSystems, 2009. IROS 2009. IEEE/RSJ International
Conference on, pages 2763–2769. IEEE, 2009.
[31] J. Kacer. J-Sim – a Java-based tool for discretesimulations. In Proceedings of the 23rd InternationalAutumn Colloquium ASIS-2001: Advanced Simulationof Systems, pages 135–141, Namestı Msgre Sramka 6,70200 Ostrava, Czech Republic, September 2001.MARQ.
[32] N. Koenig and A. Howard. Design and use paradigmsfor gazebo, an open-source multi-robot simulator. InIntelligent Robots and Systems, 2004.(IROS 2004).Proceedings. 2004 IEEE/RSJ International Conferenceon, volume 3, pages 2149–2154. IEEE, 2004.
[33] M. Kudelski, M. Cinus, L. Gambardella, andG. Di Caro. A framework for realistic simulation ofnetworked multi-robot systems. In Intelligent Robotsand Systems (IROS), 2012 IEEE/RSJ InternationalConference on, pages 5018–5025, 2012.
[34] Y. Meng, Y. Zhang, and Y. Jin. Autonomousself-reconfiguration of modular robots by evolving ahierarchical mechanochemical model. ComputationalIntelligence Magazine, IEEE, 6(1):43 –54, feb. 2011.
[35] D. M. Nicol, B. Premore, and A. Ogielski. Usingsimulation to understand dynamic connectivity at thecore of the internet. In Proceedings of UKSim 2003,Cambridge University, England, April 2003.
[36] C. Pinciroli, V. Trianni, R. O’Grady, G. Pini,A. Brutschy, M. Brambilla, N. Mathews, E. Ferrante,G. Caro, F. Ducatelle, M. Birattari, L. Gambardella,and M. Dorigo. Argos: a modular, parallel,multi-engine simulator for multi-robot systems. SwarmIntelligence, 6(4):271–295, 2012.
[37] G. Piro, L. A. Grieco, G. Boggia, and P. Camarda.Nano-sim: Simulating electromagnetic-basednanonetworks in the network simulator 3. InProceedings of the 6th International ICST Conferenceon Simulation Tools and Techniques, SimuTools ’13,pages 203–210, ICST, Brussels, Belgium, Belgium,2013. ICST (Institute for Computer Sciences,Social-Informatics and TelecommunicationsEngineering).
[38] B. D. Rister, J. Campbell, P. Pillai, and T. C. Mowry.Integrated debugging of large modular robotensembles. In ICRA, pages 2227–2234, 2007.
[39] A. Varga and R. Hornig. An overview of the omnet++simulation environment. In Proceedings of the 1stinternational conference on Simulation tools andtechniques for communications, networks and systems& workshops, Simutools ’08, pages 60:1–60:10. ICST,2008.
[40] P. Wang, J. M. Jornet, M. Abbas Malik, N. Akkari,and I. F. Akyildiz. Energy and spectrum-aware macprotocol for perpetual wireless nanosensor networks inthe terahertz band. Ad Hoc Networks,11(8):2541–2555, 2013.
[41] V. Zykov, P. William, N. Lassabe, and H. Lipson.Molecubes extended: Diversifying capabilities ofopen-source modular robotics. In IROS-2008Self-Reconfigurable Robotics Workshop, 2008.





























