Embed Size (px)
Citation preview

Page 1 / 8
SSI
SCIENCES DE
L’INGENIEUR St Jo
Avignon
LE MOTEUR ASYNCHRONE
FICHE DE
COURS
V Chassilian
1. Introduction
Un système automatisé domestique ou industriel pouvant être relié au réseau électrique sera donc alimenté par l’énergie électrique alternative fournie par EDF. Dans ce cas, l’actionneur utilisé sera généralement un moteur asynchrone, alimenté par une tension sinusoïdale. 2. Symboles : En fonction de l’alimentation disponible, on utilisera : 3. Principe de fonctionnement :
Présentation du principe DISQUE EN CUIVRE OU EN ALUMINIUM AIMANT PERMANENT TOURNANT A Nr S N TOURNANT A Ns a) Entraînons en rotation un aimant, on a la création d’un CHAMP TOURNANT qui tourne à la même vitesse que l’aimant. Nous appellerons cette vitesse Ns : VITESSE DE SYNCHRONISME. b) Plaçons un disque conducteur entre les 2 pôles de l’aimant : Entraînons en rotation l’aimant à la vitesse Ns. On s’aperçoit que le disque tourne dans le MÊME SENS et à une vitesse Nr : VITESSE DE ROTATION inférieure à
l’aimant : Nr Ns
Enoncé du principe Un disque conducteur placé dans un champ VARIABLE est le siège de COURANTS INDUITS, ces courants tendent à S’OPPOSER à la CAUSE qui leur ont donné naissance, et font tourner le disque dans le MÊME SENS de rotation que le champ et à une vitesse Nr inférieur à Ns.
Les 2 mouvements sont ASYNCHRONES. C’est le principe du moteur asynchrone
1
ALIMENTER DISTRIBUER
&
PROTEGER
CONVERTIR
Prise réseau Préactionneurs
électrique ………………
………………..
……………………………………………….....................................
…………………………………………….….....................................
Ou

Page 2 / 8
SSI
SCIENCES DE
L’INGENIEUR St Jo
Avignon
LE MOTEUR ASYNCHRONE
FICHE DE
COURS
V Chassilian
Réalisation théorique du champ tournant :
Rappel : La circulation d'un courant dans une bobine crée ………………………………………..……… ……………………………………………………… : B dans l'axe de la bobine. Sa direction et son intensité dépendent du ………………………………………………..…………… …………………………………………………………………………... C'est une grandeur vectorielle.
Ainsi, si le courant est alternatif, le champ magnétique varie en sens et en direction à la même fréquence que le courant.
Application au moteur : Dans le cas du moteur triphasé, les trois bobines sont disposées dans le stator à 120° les unes des autres, trois champs magnétiques sont ainsi créés. Compte tenu de la nature du courant sur le réseau triphasé, les trois champs sont déphasés (chacun à son tour passe par un maximum). La résultante de ces trois champs crée un champ magnétique tournant à une vitesse nommée vitesse de synchronisme.
4. Constitution du moteur asynchrone : Il est constitué :
- d'une partie fixe, le STATOR. Le stator est constitué d’un empilement de fines tôles en fer et silicium qui amplifient le flux émis par les bobines. Ces tôles sont séparées par un vernis, les bobines sont placées dans les encoches de ces tôles. Stator complet Tôle Enroulement des bobines

Page 3 / 8
SSI
SCIENCES DE
L’INGENIEUR St Jo
Avignon
LE MOTEUR ASYNCHRONE
FICHE DE
COURS
V Chassilian
- d'une partie rotative, le ROTOR. Le rotor est constitué d’un empilage de fines tôles en fer et silicium formant un circuit magnétique, séparées entre elles par un vernis isolant. De l’aluminium est coulé dans les orifices de ces tôles, formant ainsi des barres reliées à leurs extrémités par deux anneaux conducteurs. Elles constituent une "cage d'écureuil", favorisant la circulation de courants induits. Tôles + Cage d’écureuil en aluminium = Rotor 5. Rotation d’un moteur triphasé : Le stator est constitué de 3 bobines déphasées de 120°. 6. Rotation d’un moteur asynchrone monophasé : Il est constitué au niveau de son stator de 2 bobines déphasées de 180°. Le champ statorique permet de maintenir une rotation mais pas de la provoquer. Il faut donc ajouter un système qui entrainera une rotation au démarrage.
- 1° technique : Enroulement auxiliaire avec condensateur de démarrage
Le branchement des bobines sur le réseau se fait au niveau de la boîte à bornes située sur le moteur. On dispose ainsi de 6 connexions, une pour chacune des extrémités des trois bobines.

Page 4 / 8
SSI
SCIENCES DE
L’INGENIEUR St Jo
Avignon
LE MOTEUR ASYNCHRONE
FICHE DE
COURS
V Chassilian
- 2° technique : Bague de déphasage (spire de Frager) pour de faibles puissances 7. Inversion du sens de rotation Pour un moteur asynchrone triphasé L’inversion du sens de rotation s’obtient en permutant le branchement de 2 des 3 phases :
Pour un moteur asynchrone monophasé Pour un moteur asynchrone monophasé, l’inversion de sens s’obtient en inversant la polarité aux bornes de l’enroulement auxiliaire :
L’inversion de sens s’effectue dans la pratique à l’aide de 2 contacteurs avec verrouillage mécanique et électrique afin qu’ils ne puissent pas se fermer en même temps pour éviter ……………………………………………………
Page 5 / 8
SSI
SCIENCES DE
L’INGENIEUR St Jo
Avignon
LE MOTEUR ASYNCHRONE
FICHE DE
COURS
V Chassilian
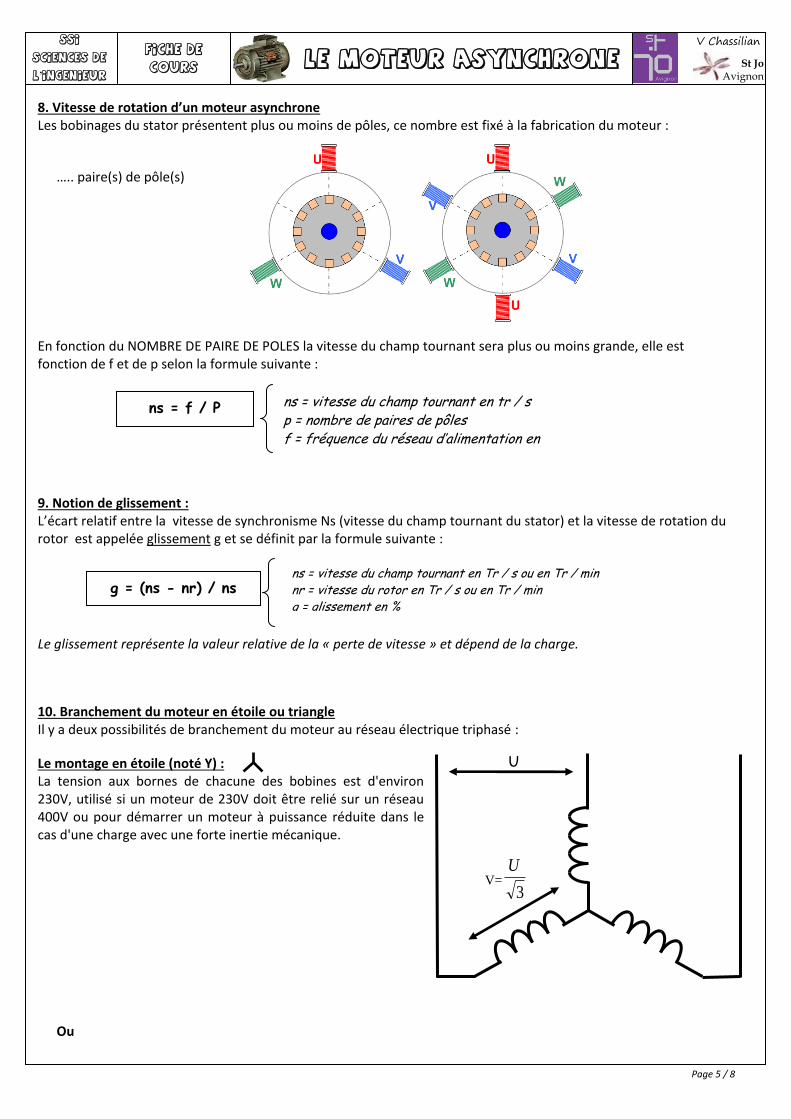
8. Vitesse de rotation d’un moteur asynchrone Les bobinages du stator présentent plus ou moins de pôles, ce nombre est fixé à la fabrication du moteur :
….. paire(s) de pôle(s)
En fonction du NOMBRE DE PAIRE DE POLES la vitesse du champ tournant sera plus ou moins grande, elle est fonction de f et de p selon la formule suivante :
9. Notion de glissement : L’écart relatif entre la vitesse de synchronisme Ns (vitesse du champ tournant du stator) et la vitesse de rotation du rotor est appelée glissement g et se définit par la formule suivante :
Le glissement représente la valeur relative de la « perte de vitesse » et dépend de la charge.
10. Branchement du moteur en étoile ou triangle Il y a deux possibilités de branchement du moteur au réseau électrique triphasé :
Le montage en étoile (noté Y) : La tension aux bornes de chacune des bobines est d'environ 230V, utilisé si un moteur de 230V doit être relié sur un réseau 400V ou pour démarrer un moteur à puissance réduite dans le cas d'une charge avec une forte inertie mécanique. Ou
ns = f / P
g = (ns - nr) / ns
ns = vitesse du champ tournant en tr / s p = nombre de paires de pôles f = fréquence du réseau d’alimentation en Hz
ns = vitesse du champ tournant en Tr / s ou en Tr / min nr = vitesse du rotor en Tr / s ou en Tr / min g = glissement en %
V=3
U
U

Page 6 / 8
SSI
SCIENCES DE
L’INGENIEUR St Jo
Avignon
LE MOTEUR ASYNCHRONE
FICHE DE
COURS
V Chassilian
Le montage en triangle (noté D) :
Chacune des bobines est alimentée avec la tension nominale du réseau, utilisé lorsque l’on a un réseau triphasé 230V (en sortie d’un variateur par exemple).
11. Notion de couple et de puissance : L1 L2 L3 Iabsorbé - joules les pertes - fer (magnétiques) - mécaniques
Ns
Bilan des puissances
Formules à connaître :
Pa = U I 3 cos
Pu = Tu
Avec = ( 2 Nr ) / 60
= Pu / Pa
Avec :
Pa : puissance absorbée ( W ) U : tension entre 2 phases (V) I : courant absorbée ( A )
cos : facteur de puissance Pu : puissance utile en W Tu : couple utile en N.m
: rotation du moteur (rad / s) Nr : vitesse du rotor en tr / min
: rendement du moteur
Nr
U
U
Page 7 / 8
SSI
SCIENCES DE
L’INGENIEUR St Jo
Avignon
LE MOTEUR ASYNCHRONE
FICHE DE
COURS
V Chassilian
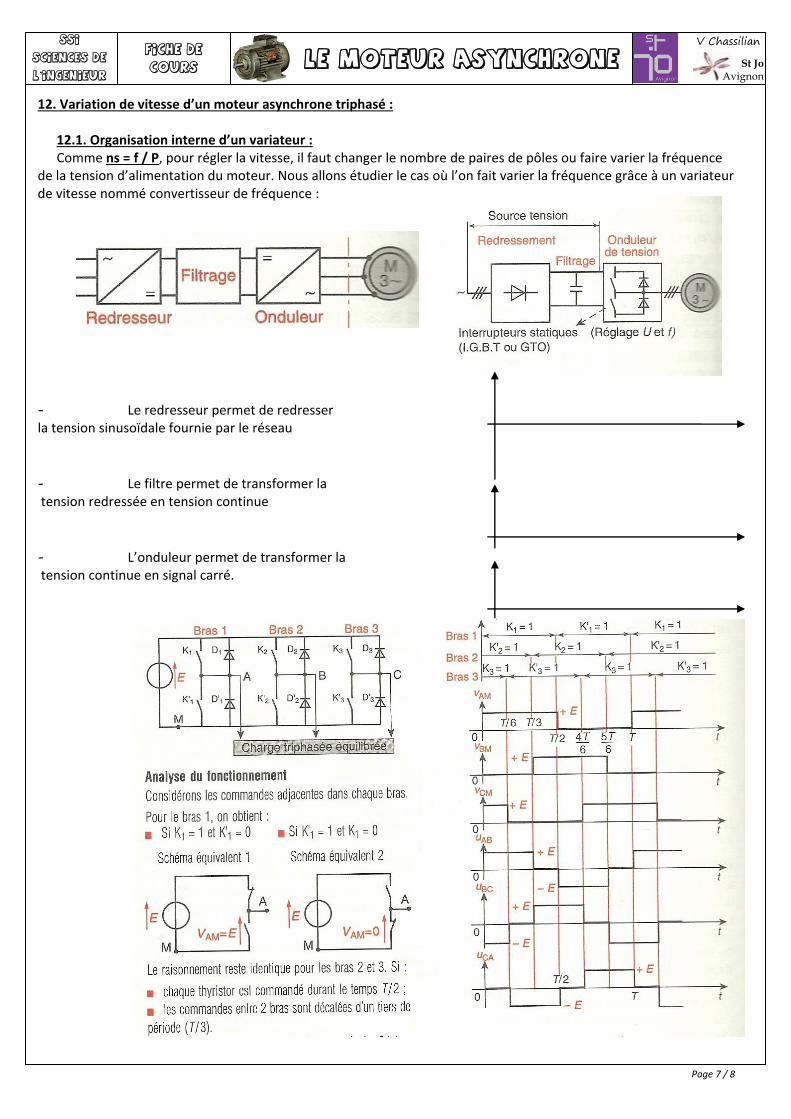
12. Variation de vitesse d’un moteur asynchrone triphasé : 12.1. Organisation interne d’un variateur : Comme ns = f / P, pour régler la vitesse, il faut changer le nombre de paires de pôles ou faire varier la fréquence de la tension d’alimentation du moteur. Nous allons étudier le cas où l’on fait varier la fréquence grâce à un variateur de vitesse nommé convertisseur de fréquence :
- Le redresseur permet de redresser la tension sinusoïdale fournie par le réseau
- Le filtre permet de transformer la tension redressée en tension continue
- L’onduleur permet de transformer la tension continue en signal carré.

Page 8 / 8
SSI
SCIENCES DE
L’INGENIEUR St Jo
Avignon
LE MOTEUR ASYNCHRONE
FICHE DE
COURS
V Chassilian
C’est en faisant varier la période de T que l’on fait varier la fréquence de la tension Um. Un double problème se pose alors :
- La variation de vitesse doit se faire en conservant le rapport Ueff/f = cte. Ainsi, si l’on fait varier f il faut aussi faire varier Ueff dans les mêmes proportions.
- Une machine asynchrone doit être alimentée par un signal sinusoïdal. L’alimentation avec des signaux carrés pleine onde génère des vibrations et une augmentation des pertes fers. 12.2. La MLI Fonctionnement et définition : Les modulateurs MLI « Modulation de Largeur d’Impulsion » Ou PWM « Pulse Width Modulation » vont découper le signal. Le nombre d’harmoniques diminue lorsque l’on augmente la Fréquence de découpage. Ainsi, pour la majorité des variateurs, on effectuera une surmodulation. Avantages de la MLI : Cette technique va répondre aux deux problèmes posés précédemment :
- Conservation du rapport U/f constant : On ajustera le découpage α1, α2, α3… Cet ajustement fera varier la valeur de Ueff.
- La tension étant très hachée se rapproche du signal sinusoïdal. Le stator étant formé d’inductances, la forme du courant est quasiment sinusoïdale.
13. Pourquoi utiliser un moteur asynchrone ? C’est un moteur robuste. L’absence de rotor bobiné supprime les pertes liées aux frottements et la durée de vie du moteur. Il n’a pas besoin d’entretien. Il a un bon couple de démarrage. Il ne coûte pas cher (comparé au moteur à courant continu). Les variateurs de vitesse sont simples d’utilisation, il est donc facile à commander.









