Embed Size (px)
Citation preview

Vérins électromécaniques

Pinces à souder
Servo-presses
Thermo-formage
Médical
Sidérurgie
2

Vérins électromécaniques: Association vis à rouleaux et moteur brushless Avantages des vérins électromécaniques sur les autres technologies ------------------------------ 05 Sélection rapide de la gamme de produits --------------------------------------------------------------- 06 Trois gammes pour répondre à vos besoins ------------------------------------------------------------- 07
Vérins électromécaniques modulaires Description du mécanisme ---------------------------------------------------------------------------------- 09 Principaux avantages ----------------------------------------------------------------------------------------- 09 Nombreuses combinaisons pour des solutions sur-mesure ----------------------------------------- 09 Gamme SRSA -------------------------------------------------------------------------------------------------- 10 Sélection rapide de la taille --------------------------------------------------------------------------------- 11 Sélection rapide du moteur --------------------------------------------------------------------------------- 12 Courbes de durée de vie SRSA •• ------------------------------------------------------------------------ 13 Désignation ---------------------------------------------------------------------------------------------------- 16 Performances et dimensions ------------------------------------------------------------------------------- 18 Option: vérins haute résolution SVSA -------------------------------------------------------------------- 30 Courbes de durée de vie SVSA •• ------------------------------------------------------------------------- 31 Performances et dimensions ------------------------------------------------------------------------------- 32 Option: vérins grande vitesse SLSA ----------------------------------------------------------------------- 38 Courbes de durée de vie SLSA •• ------------------------------------------------------------------------- 39 Performances et dimensions ------------------------------------------------------------------------------- 40 Attachement avant -------------------------------------------------------------------------------------------- 44
Vérins électromécaniques compacts Le nouveau standard du mouvement à hautes performances -------------------------------------- 47 Principaux avantages ---------------------------------------------------------------------------------------- 47 Performances ------------------------------------------------------------------------------------------------- 47 Désignation ---------------------------------------------------------------------------------------------------- 48 Performances spécifi ques gammes compacte et ultra-compacte ----------------------------------- 49 Dimensions ----------------------------------------------------------------------------------------------------- 51 Options: capteur d’effort intégré --------------------------------------------------------------------------- 58 Options: système de refroidissement intégré ------------------------------------------------------------ 59
Variateurs pour vérins électromécaniques Spécifi cations générales ------------------------------------------------------------------------------------- 62 Détails des performances ------------------------------------------------------------------------------------ 63 Conformité aux normes “CE” ------------------------------------------------------------------------------- 63 Fonctions ------------------------------------------------------------------------------------------------------- 64 Logiciel Motion Explorer ------------------------------------------------------------------------------------- 65 Accessoires ---------------------------------------------------------------------------------------------------- 66
Vérins fortes charges Expérience ----------------------------------------------------------------------------------------------------- 69 Caractéristiques du vérin fortes charges ----------------------------------------------------------------- 69 Performances et dimensions ------------------------------------------------------------------------------- 70 Principaux avantages ---------------------------------------------------------------------------------------- 72 Application ----------------------------------------------------------------------------------------------------- 72
Cahier des charges pour vérins électromécaniques ----------------- 74
Vérins électromécaniques
3
1
2
3
4
5

4
Le nouveau vérin électromécanique SKF, allie la puissance de l’hydraulique à la vitesse du pneumatique.
Les vérins SKF qui sont construits autour des vis à rouleaux repoussent les limites des performances des vérins linéaires. Ils sont conçus pour des applications à hautes fréquences d’utilisation demandant une longue durée de vie, une accéléra-tion rapide ou une charge élevée. Les vérins utilisent des moteurs brushless, accouplés directe-ment à la vis.

5
Vérins électromécaniques
La vis à rouleauxLe fi letage des rouleaux et de l’écrou élimine la recirculation des éléments roulants et permet un mouvement planetaire des rou-leaux, ce qui supprime le risque potentiel de défaillance lié à la recirculation. La vis et l’écrou sont fi letés suivant un profi l triangulaire à 90° et avec le même nombre de fi lets, ce qui optimise la résistance au cisaillement Les rouleaux sont fi letés mais avec un seul fi let. Ils roulent entre l’écrou et la vis avec un mouve-ment planétaire.
Les fl ancs du fi let sont bombés suivant un grand rayon de con-tact pour avoir une forte capacité de charge et une rigidité élevée. Les rouleaux sont fi letés selon le même angle d’hélice que l’écrou et de ce fait ne se déplacent pas axialement. La recirculation n’est donc pas nécessaire et fait de la vis, un concept unique permettant des vitesses de rotation élevées.Des accélérations jusqu’à 12 000 rad/s2 sont possibles.
Le moteur brushlessCe moteur est constitué d’un sta-tor bobiné et d’un rotor à aimants permanents. Il est exempt de balais, ce qui réduit sa mainte-nance au minimum. Conçu pour de hautes performances, il permet :• de très fortes accélérations• un couple important et cons-
tant sur une large étendue de vitesse
• une vitesse élevée de fonction-nement
• un asservissement précis en vitesse et/ou positionnement.
Si les vérins hydrauliques restent la seule solution pour des très fortes charges et des courses très importantes, les vérins électro-mécaniques sont une alternative économiquement très intéres-sante dans tous les autres cas. En effet, dans l’hydraulique, on convertit deux fois l’énergie contrairement à l’électromécani-que où il n’y a qu’une seule transformation. Le temps d’ins-tallation est réduit. La mise en œuvre est facile; le variateur positionneur peut être connecté à toute source de puis-sance et les interfaces client ren-dent le montage aisé.
Avantages des vérins électromécaniques sur les autres technologies
Vérins Vérins Vérins électriques SKF hydrauliques pneumatiques
Capacité de charge Très élevée Très élevée Elevée
Durée de vie Très longue Peut être longue si Peut être longue si bonne maintenance bonne maintenance
Vitesse Très élevée Elevée Très élevée
Accélération Très élevée Très élevée Très élevée
Raideur Très élevée Elevée Très faible
Résistance aux chocs Très élevée Très élevée Elevée
Rendement > 80 % < 50 % < 50 %
Maintenance Très faible Très élevée Elevée
Installation Très facile Diffi cile Très diffi cile
Asservissement en position Très facile Complexe Très complexe
Précision de positionnement Très élevée Moyenne Faible
Conséquences Faible Risque important Niveau sonore environnementales de fuites élevé
1
Recommandations pour la sélection
6
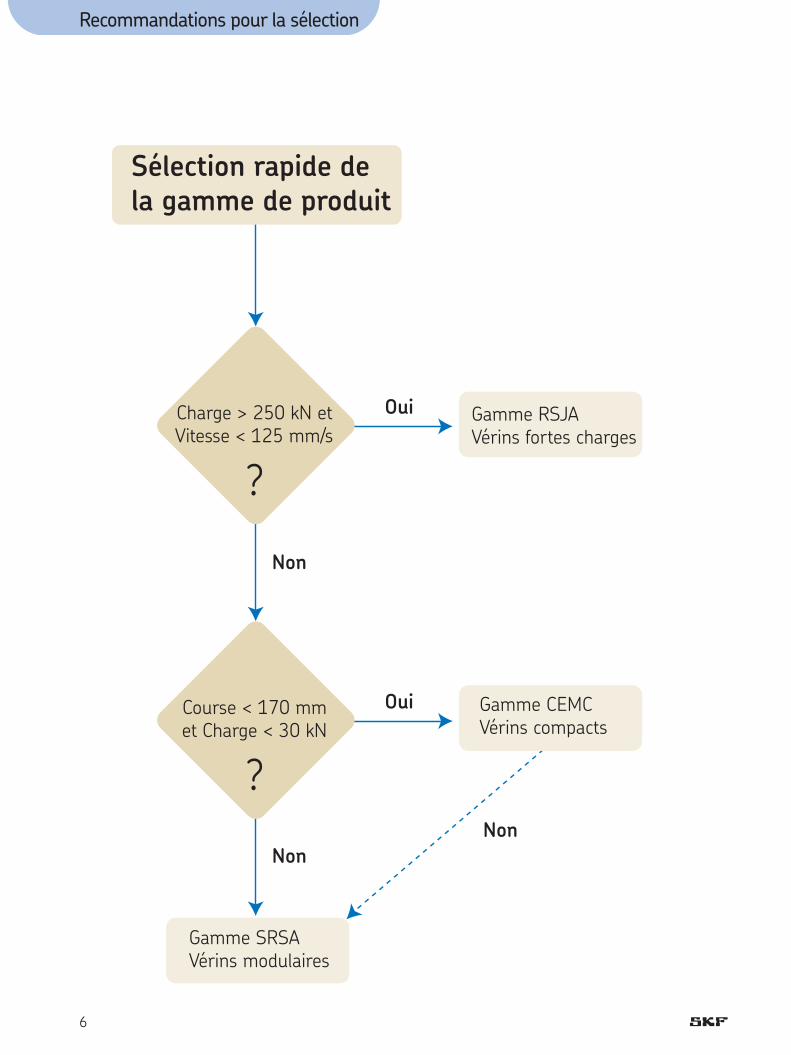
Sélection rapide dela gamme de produit
Charge > 250 kN etVitesse < 125 mm/s
Gamme RSJAVérins fortes charges
Oui
?
Course < 170 mmet Charge < 30 kN
Gamme CEMCVérins compacts
Non
Gamme SRSAVérins modulaires
Oui
Non
Non
?

Recommandations pour la sélection
7
0 200 400 600 800 1000 1200 1400 1600
250
1 000
Vitesse linéaire maximum (mm/s)
RSJA : vérin fortes chargesSRSA : vérin modulaireCEMC : vérin compact
Effo
rt n
omin
al (
kN)
Trois gammes pour répondre à vos besoins
RSJA
SRSA
CEMC
1

8
Vérins modulaires
Vis à grand
pas
Accouplement
Attachement
moteur
Vis à rouleaux
Embout à
rotule
Tourillons à
hautes
capacités
Moteur
Réducteur

9
Vérins modulaires
• Facilité d’utilisation et d’installa-tion
• Utilisation avec des cadences élevées
• Courses longues et rapides possibles sous charges élevées
• Fortes accélérations• Grande fi abilité• Rigidité élevée
• Conception avec une ciné-matique simple: moteur, accouplement et vis à rouleaux apportant une grande fi abilité, un minimum d’entretien et une longue durée de vie
• Variateur programmable• Système anti-rotation intégré.
Principaux avantages
A partir de la gamme de vérins de base, vous pouvez construire votre propre vérin. En fonction des caractéris-tiques mécaniques (capacité de charge dynamique, vitesse), vous pouvez défi nir le moteur qui
convient le mieux à votre appli-cation (effort nominal, vitesse linéaire, effort impulsionnel, etc..); vous n’êtes pas limités à une seule confi guration.
Nombreuses combinaisons pour des solutions sur-mesure
Le vérin électromécanique à hau-tes performances est composé d’une vis à rouleaux satellites SKF animée par un moteur brushless via un accouplement. Un réduc-teur planétaire est associé dans certaines confi gurations. La vis à rouleaux transforme le mouve-ment de rotation en mouvement de translation. Suivant le sens de rotation de la vis, l’écrou fait avancer ou reculer le tube de poussée, ce dernier étant relié à la charge. La vis est maintenue par des roulements à contacts obliques garantissant une grande rigidité. L’ensemble permet d’atteindre des vitesses élevées et une longue durée de vie. Pour des courses importantes, la vis est
guidée dans le tube de poussée évitant ainsi toute vibration. Le tube de poussée et l’écrou à rouleaux sont guidés dans le tube extérieur produisant un système rigide sur le plan axial et radial. Un joint à lèvre assure l’étanchéité entre le tube de poussée et le tube extérieur. Le système anti-rotation intégré est constitué de rails de guidage. Cette conception préchargée garantie une grande rigidité en torsion et une longue durée de vie. Deux amortisseurs internes sécurisent le mécanisme pendant les phases de réglage. L’ensemble est conçu et fabri-qué pour des applications indus-trielles.
Description du mécanisme
2

Vérins modulaires
10
0 100 200 300 400 500 600 700 800 900 1000 1100 1200 1300 1400 1500
500
450
400
350
300
250
200
150
100
50
0
Vitesse linéaire maximum (mm/s)
Effo
rt n
omin
al (
kN)
Sur demande
Gamme modulaire
Gamme de produits

Vérins modulaires
11
Calculez l'effort moyen Fmoyen
Calculez la durée de vie (distance requise)
Exemple: Fmoyen = 25 kN
Durée de vie visée 5 ans - 231jours/an, 24 heures/jourCourse: 50 mmCycle: 10 secDurée de vie (distance requise) = 2 ™ 50 ™ 5 ™ 231 ™ 24 ™ 3600/10 = 1000 106 mm
Passez à la sélection rapide du moteur
Prenez la taille supérieure
Le point est-il sous la courbe ?
Placez le point (durée de vie -Fmoyen) sur la courbe de durée de vie (commencez par la taille SRSA 25)
Méthode Comment calculer Fmoyen
Non
Oui
SRSA25: trop petit
SRSA30: trop petitSRSA3910 et SRSA3915 répondent aux besoins
Fmoyen = (F1
3 L1 + F23 L2 + F3
3 L3 + …)1/3
(L1 + L2 + L3 + …)1/3
Fmoyen= Fmin + 2Fmax
3
course
Effo
rt
F1 F2F3
L1 L2 L3
course
Effo
rt
Fmin
Fmax
durée de vie (distance) (106 mm)
Effo
rt m
oyen
(N)
durée de vie (distance) (106 mm)
Effo
rt m
oyen
(N)
durée de vie (distance) (106 mm)
Effo
rt m
oyen
(N)
Customer requirement
Customer requirementCustomer requirement
Sélection rapide de la taille - Durée de vie
2

Calculez l'effort thermique Fthermique
Calculez la vitesse maximum requise
Calculez l'effort nominal requis(1): Fnom = Fthermique / 0,7
Exemple: Fthermique = 14 kN
Fnominal nécessaire = 14 / 0,7 = 20 kN
Vitesse max. = 200 mm/s
La taille sélectionnée était SRSA39 avec un pas de 10 ou de 15 mm.Vitesse maximum demandée: 200 mm/set effort nominal calculé: 20 kNDans le tableau ci-dessous, nous voyons que la version SRSA 3910- ....-X82R3B convient:
Avec la taille de vérin définie précédemment, cherchez dans les tableaux de performances le vérin qui se rapproche le plus (effort nominal et vitesse maxi) (2)
Méthode Comment calculer Fthermique
Fthermique = (T1
(F1)2 + T2
(F2)2 + T3
(F3)2 )1/2
(T1 + T2 + T3 )1/2
Temps (5)
début ducycle suivant
cycle complet
Effo
rt (k
N)
F1
F2
F3
T1 T2 T3
Vérins modulaires
12
Sélection du moteur
Performances Désignation Pas Effort Effort im- Vitesse Course Sur- Capacité Puissance Taille du nominal pulsionnel linéaire standard course dynamique nominale variateur
mm kN kN mm/s mm mm kN kW -
5 5 5 5 10 10 10 10 15 15 15 15
13,3 23,3 38,0 63,3 12,8 20,9 36,6 61,0 13,0 25,2 36,9 61,5
25,9 49,8 73,9 123,1* 27,4 40,6 78,0 130,1* 29,8 58,7 85,0 141,7*
279,2** 175,0 108,3 65,0 350,0 216,7 116,7 70,0 650,0 291,7 216,7 130,0
SRSA3905-•••-X82RBSRSA3905-•••-X84QBSRSA3905-•••-X82R3BSRSA3905-•••-X82R5B
SRSA3910-•••-X84QBSRSA3910-•••-X82R3BSRSA3910-•••-X84Q3BSRSA3910-•••-X84Q5B
SRSA3915-•••-X86JBSRSA3915-•••-X84K3BSRSA3915-•••-X86J3BSRSA3915-•••-X86J5B
0 ... 800 0 ... 800 0 ... 800 0 ... 800 0 ... 800 0 ... 800 0 ... 800 0 ... 800 0 ... 800 0 ... 800 0 ... 800 0 ... 800
5 (™2) 5 (™2) 5 (™2) 5 (™2) 5 (™2) 5 (™2) 5 (™2) 5 (™2) 5 (™2) 5 (™2) 5 (™2) 5 (™2)
129,2 129,2 129,2 129,2 138,5 138,5 138,5 138,5 138,5 138,5 138,5 138,5
5,35,15,35,3
5,15,35,15,1
7,56,87,57,5
16 16 16 16 16 16 16 16 32 32 32 32
(1) Ce calcul est indicatif pour faire une première sélection. Un calcul précis doit tenir compte des charges d’accélération/décélération, de la vitesse moyenne… Pour obtenir une défi nition optimisée de votre vérin, contacter SKF.(2) Si vous ne trouvez pas de vérin correspondant à votre besoin, merci de contacter SKF.

Vérins modulaires
13
Courbes de durée de vie
SRSA 25
SRSA 30
2
Durée de vie (distance) 106 mm
Effo
rt m
oyen
(N)
Durée de vie (distance) 106 mm
Effo
rt m
oyen
(N)

Vérins modulaires
14
SRSA 39
SRSA 48
Durée de vie (distance) 106 mm
Effo
rt m
oyen
(N)
Durée de vie (distance) 106 mm
Effo
rt m
oyen
(N)

Vérins modulaires
15
SRSA 60
SRSA 75
2
Durée de vie (distance) 106 mm
Effo
rt m
oyen
(N)
Durée de vie (distance) 106 mm
Effo
rt m
oyen
(N)

Vérins modulaires
16
Désignation

Vérins modulaires
17
Désignation
2

Vérins modulaires
18
Performances Désignation Pas Effort Effort im- Vitesse Course Sur- Capacité Puissance Taille du nominal (1) pulsionnel (2) linéaire standard (3) course (4) dynamique nominale variateur (5)
mm kN kN mm/s mm mm kN kW -
5 5 5 5 10 10 10 10
4,9 10,7 23,3 40,7 5,6 10,7 21,4 37,5
13,5 21,5 64,0* 81,7* 11,3 22,7 43,0 90,5*
333,0 225,0 66,7 56,3 450,0 216,7 112,5 95,2
SRSA2505-•••-X43LBSRSA2505-•••-X63RBSRSA2505-•••-X43L5BSRSA2505-•••-X63R4B
SRSA2510-•••-X63RBSRSA2510-•••-X62R3BSRSA2510-•••-X63R4BSRSA2510-•••-X63N7B
Caractéristiques dimensionnelles Désignation A B C Ø d Ø D L M Ø t Ø T Masse (6)
Wo Wx
mm mm mm mm mm mm mm mm mm Kg Kg/50mm
91,5
121,0 98,0 121,0 121,0 121,0 121,0 121,0
111,5 141,0 118,0 141,0 141,0 141,0 141,0 141,0
107 117 125 125 117 125 125 161
- 61 - 61 - 61 - 61 - 61 - 61 - 61 - 61
- 96 - 96 - 96 - 96 - 96 - 96 - 96 - 96
251
265 364 387 265 358 387 388
SRSA2505-•••-SL/P0-T1-•-X43LBSRSA2505-•••-SL/P1-T1-•-X43LBSRSA2505-•••-SL/P0-T1-•-X63RBSRSA2505-•••-SL/P1-T1-•-X63RBSRSA2505-•••-SL/P0-T2-•-X43L5BSRSA2505-•••-SL/P1-T2-•-X43L5BSRSA2505-•••-SL/P0-T2-•-X63R4BSRSA2505-•••-SL/P1-T2-•-X63R4B
SRSA2510-•••-SL/P0-T1-•-X63RBSRSA2510-•••-SL/P1-T1-•-X63RBSRSA2510-•••-SL/P0-T1-•-X62R3BSRSA2510-•••-SL/P1-T1-•-X62R3BSRSA2510-•••-SL/P0-T2-•-X63R4BSRSA2510-•••-SL/P1-T2-•-X63R4BSRSA2510-•••-SL/P0-T2-•-X63N7BSRSA2510-•••-SL/P1-T2-•-X63N7B
M42x1,5 x prof. 22 M35x1,5 x prof. 22 M42x1,5 x prof. 22 M35x1,5 x prof. 22 M42x1,5 x prof. 22 M35x1,5 x prof. 22 M42x1,5 x prof. 22 M35x1,5 x prof. 22 M42x1,5 x prof. 22 M35x1,5 x prof. 22 M42x1,5 x prof. 22 M35x1,5 x prof. 22 M42x1,5 x prof. 22 M35x1,5 x prof. 22 M42x1,5 x prof. 22 M35x1,5 x prof. 22
25
25 35 35 25 25 35 35
36 36 45
45 36 36 45
45
20,323,024,927,624,727,329,331,9
24,927,627,329,929,331,932,835,4
1,11,31,11,31,11,31,11,3
1,11,31,11,31,11,31,11,3
0 ... 400 0 ... 400 0 ... 400 0 ... 400 0 ... 400 0 ... 400 0 ... 400 0 ... 400
5 (™2) 5 (™2) 5 (™2) 5 (™2) 5 (™2) 5 (™2) 5 (™2) 5 (™2)
63,3 63,3 63,3 63,3 72,6 72,6 72,6 72,6
1,82,81,82,8
2,82,52,83,2
08 08 08 08 08 08 08 16
(1) Effort nominal: peut être utilisé 100 % du temps à basse vitesse (10 % de la vitesse maximum).(2) Effort impulsionnel: effort maximum sur un temps court (1 s max) à basse vitesse pour le variateur associé.(3) Elimination de jeu pour course ≤ 300 mm maxi. Pour courses supérieures, jeu axial maxi = 20 µm. Course standard par pas de 50 mm. Pour toute course spéciale, contacter SKF.(4) Intégrée à chaque extrémité.(5) Voir chapitre 4: Variateurs pour vérins électromécaniques.(6) Masse totale = Wo + (course/50) ™ Wx
* Effort impulsionnel utilisable en statique uniquement. Pour les phases dynamiques, cette valeur doit être limitée dans le variateur à 80 % de la capacité dynamique du vérin par l’utilisateur. Contacter SKF.

Vérins modulaires
19
SRSA 25••-••••-SL•
ØD
17
Ød
A
Ø75
63
Ø t f7
113 M
Ø10
8
Ø50
ØT
L C
17
SRSA 25••-••••-SP•ØD
17
ØdM
Ø10
8B
L
Øt f7
Ø75
Ø50
113
140
63
ØT
H =
220
max
B / 2
17
2
257 + course
317 + course avec rotule standard
257 + course
317 + course avec rotule standard

Vérins modulaires
20
Performances Désignation Pas Effort Effort im- Vitesse Course Sur- Capacité Puissance Taille du nominal (1) pulsionnel (2) linéaire standard (3) course (4) dynamique nominale variateur (5)
mm kN kN mm/s mm mm kN kW -
5 5 5 5 10 10 10 10
7,0 13,9 29,7 52,9 7,5 13,1 28,5 49,9
14,8 27,0 71,9 102,8* 14,6 28,0 55,5 97,1*
325,0 325,0 111,1 81,3 650,0 350,0 162,5 92,9
SRSA3005-•••-X62RBSRSA3005-•••-X82RBSRSA3005-•••-X63N3BSRSA3005-•••-X82R4B
SRSA3010-•••-X82RBSRSA3010-•••-X84QBSRSA3010-•••-X82R4BSRSA3010-•••-X82R7B
Caractéristiques dimensionnelles Désignation A B C Ø d Ø D L M Ø t Ø T Masse (6)
Wo Wx
mm mm mm mm mm mm mm mm mm Kg Kg/50mm
121
158 121 158 158 158 158 158
141 178 141 178 178 178 178 178
119 129 127 163 129 129 163 163
-
71 - 71 - 71 - 71 - 71 - 71 - 71 - 71
- 105 - 105 - 105 - 105 - 105 - 105 - 105 - 105
236
266 387 397 266 326 397 397
SRSA3005-•••-SL/P0-T1-•-X62RBSRSA3005-•••-SL/P1-T1-•-X62RBSRSA3005-•••-SL/P0-T1-•-X82RBSRSA3005-•••-SL/P1-T1-•-X82RBSRSA3005-•••-SL/P0-T2-•-X63N3BSRSA3005-•••-SL/P1-T2-•-X63N3BSRSA3005-•••-SL/P0-T2-•-X82R4BSRSA3005-•••-SL/P1-T2-•-X82R4B
SRSA3010-•••-SL/P0-T1-•-X82RBSRSA3010-•••-SL/P1-T1-•-X82RBSRSA3010-•••-SL/P0-T1-•-X84QBSRSA3010-•••-SL/P1-T1-•-X84QBSRSA3010-•••-SL/P0-T2-•-X82R4BSRSA3010-•••-SL/P1-T2-•-X82R4BSRSA3010-•••-SL/P0-T2-•-X82R7BSRSA3010-•••-SL/P1-T2-•-X82R7B
M48x2 x prof. 30 M44x2 x prof. 30 M48x2 x prof. 30 M44x2 x prof. 30 M48x2 x prof. 30 M44x2 x prof. 30 M48x2 x prof. 30 M44x2 x prof. 30 M48x2 x prof. 30 M44x2 x prof. 30 M48x2 x prof. 30 M44x2 x prof. 30 M48x2 x prof. 30 M44x2 x prof. 30 M48x2 x prof. 30 M44x2 x prof. 30
30
30 40 40 30 30 40 40
40 40 50 50 40 40 50 50
29,529,338,438,235,935,745,945,7
38,438,245,445,245,945,745,945,7
1,41,51,41,51,41,51,41,5
1,41,51,41,51,41,51,41,5
0 ... 500 0 ... 500 0 ... 500 0 ... 500 0 ... 500 0 ... 500 0 ... 500 0 ... 500
5 (™2) 5 (™2) 5 (™2) 5 (™2) 5 (™2) 5 (™2) 5 (™2) 5 (™2)
92,0 92,0 92,0 92,0 97,6 97,6 97,6 97,6
2,55,33,25,3
5,35,15,35,3
08 16 16 16 16 16 16 16
(1) Effort nominal: peut être utilisé 100 % du temps à basse vitesse (10 % de la vitesse maximum).(2) Effort impulsionnel: effort maximum sur un temps court (1 s max) à basse vitesse pour le variateur associé.(3) Elimination de jeu pour course ≤ 400 mm maxi. Pour courses supérieures, jeu axial maxi = 20 µm. Course standard par pas de 50 mm. Pour toute course spéciale, contacter SKF.(4) Intégrée à chaque extrémité.(5) Voir chapitre 4: Variateurs pour vérins électromécaniques.(6) Masse totale = Wo + (course/50) ™ Wx
* Effort impulsionnel utilisable en statique uniquement. Pour les phases dynamiques, cette valeur doit être limitée dans le variateur à 80 % de la capacité dynamique du vérin par l’utilisateur. Contacter SKF.

Vérins modulaires
21
SRSA 30••-••••-SL•
ØD Ød
17
Ø12
5
Ø85
Ø60
17
131
A
79
M
Ø t f7
L C
Ø T f7
SRSA 30••-••••-SP•Ø
D
Ø d
17
Ø12
517
131
Ø t f7
M
B
L
79
160
Ø60Ø
85
Ø T
H =
280
max
B / 2
2
252 + course
323 + course avec rotule standard
252 + course
323 + course avec rotule standard

Vérins modulaires
22
Performances Désignation Pas Effort Effort im- Vitesse Course Sur- Capacité Puissance Taille du nominal (1) pulsionnel (2) linéaire standard (3) course (4) dynamique nominale variateur (5)
mm kN kN mm/s mm mm kN kW -
5 5 5 5 10 10 10 10 15 15 15 15
13,3 23,3 38,0 63,3 12,8 20,9 36,6 61,0 13,0 25,2 36,9 61,5
25,9 49,8 73,9 123,1* 27,4 40,6 78,0 130,1* 29,8 58,7 85,0 141,7*
279,2** 175,0 108,3 65,0 350,0 216,7 116,7 70,0 650,0 291,7 216,7 130,0
SRSA3905-•••-X82RBSRSA3905-•••-X84QBSRSA3905-•••-X82R3BSRSA3905-•••-X82R5B
SRSA3910-•••-X84QBSRSA3910-•••-X82R3BSRSA3910-•••-X84Q3BSRSA3910-•••-X84Q5B
SRSA3915-•••-X86JBSRSA3915-•••-X84K3BSRSA3915-•••-X86J3BSRSA3915-•••-X86J5B
Caractéristiques dimensionnelles Désignation A B C Ø d Ø D L M Ø t Ø T Masse (6)
Wo Wx
mm mm mm mm mm mm mm mm mm Kg Kg/100mm
185
185 185 185 185 185 185 185 185 185 185 185
205 205 205 205 205 205 205 205 205 205 205 205
152 152 182 186 152 182 186 212 156 186 212 216
- 86 - 86 - 86 - 86 - 86 - 86 - 86 - 86 - 86 - 86 - 86 - 86
- 126 - 126 - 126 - 126 - 126 - 126 - 126 - 126 - 126 - 126 - 126 - 126
266
326 397 397 326 397 457 476 386 457 536 536
SRSA3905-•••-SL/P0-T1-•-X82RBSRSA3905-•••-SL/P1-T1-•-X82RBSRSA3905-•••-SL/P0-T1-•-X84QBSRSA3905-•••-SL/P1-T1-•-X84QBSRSA3905-•••-SL/P0-T2-•-X82R3BSRSA3905-•••-SL/P1-T2-•-X82R3BSRSA3905-•••-SL/P0-T2-•-X82R5BSRSA3905-•••-SL/P1-T2-•-X82R5B
SRSA3910-•••-SL/P0-T1-•-X84QBSRSA3910-•••-SL/P1-T1-•-X84QBSRSA3910-•••-SL/P0-T2-•-X82R3BSRSA3910-•••-SL/P1-T2-•-X82R3BSRSA3910-•••-SL/P0-T2-•-X84Q3BSRSA3910-•••-SL/P1-T2-•-X84Q3BSRSA3910-•••-SL/P0-T2-•-X84Q5BSRSA3910-•••-SL/P1-T2-•-X84Q5B
SRSA3915-•••-SL/P0-T1-•-X86JBSRSA3915-•••-SL/P1-T1-•-X86JBSRSA3915-•••-SL/P0-T2-•-X84K3BSRSA3915-•••-SL/P1-T2-•-X84K3BSRSA3915-•••-SL/P0-T2-•-X86J3BSRSA3915-•••-SL/P1-T2-•-X86J3BSRSA3915-•••-SL/P0-T2-•-X86J5BSRSA3915-•••-SL/P1-T2-•-X86J5B
M62x2 x prof. 40 M56x2 x prof. 40 M62x2 x prof. 40 M56x2 x prof. 40 M62x2 x prof. 40 M56x2 x prof. 40 M62x2 x prof. 40 M56x2 x prof. 40 M62x2 x prof. 40 M56x2 x prof. 40 M62x2 x prof. 40 M56x2 x prof. 40 M62x2 x prof. 40 M56x2 x prof. 40 M62x2 x prof. 40 M56x2 x prof. 40 M62x2 x prof. 40 M56x2 x prof. 40 M62x2 x prof. 40 M56x2 x prof. 40 M62x2 x prof. 40 M56x2 x prof. 40 M62x2 x prof. 40 M56x2 x prof. 40
40
40 50 50 40 50 50 50 40 50 50 50
48 48 59 59 48 59 59 59 48 59 59 59
56,255,963,262,962,762,463,763,4
63,262,962,762,470,770,478,978,6
71,270,970,770,485,985,690,790,4
4,34,84,34,84,34,84,34,8
4,34,84,34,84,34,84,34,8
4,34,84,34,84,34,84,34,8
0 ... 800 0 ... 800 0 ... 800 0 ... 800 0 ... 800 0 ... 800 0 ... 800 0 ... 800 0 ... 800 0 ... 800 0 ... 800 0 ... 800
5 (™2) 5 (™2) 5 (™2) 5 (™2) 5 (™2) 5 (™2) 5 (™2) 5 (™2) 5 (™2) 5 (™2) 5 (™2)
5 (™2)
129,2 129,2 129,2 129,2 138,5 138,5 138,5 138,5 138,5 138,5 138,5 138,5
5,35,15,35,3
5,15,35,15,1
7,56,87,57,5
16 16 16 16 16 16 16 16 32 32 32 32
(1) Effort nominal: peut être utilisé 100 % du temps à basse vitesse (10 % de la vitesse maximum).(2) Effort impulsionnel: effort maximum sur un temps court (1 s max) à basse vitesse pour le variateur associé.(3) Elimination de jeu pour course ≤ 500 mm maxi. Pour courses supérieures, jeu axial maxi = 20 µm. Course standard par pas de 100 mm. Pour toute course spéciale, contacter SKF.(4) Intégrée à chaque extrémité.(5) Voir chapitre 4: Variateurs pour vérins électromécaniques.(6) Masse totale = Wo + (course/100) ™ Wx* Effort impulsionnel utilisable en statique uniquement. Pour les phases dynamiques, cette valeur doit être limitée dans le variateur à 80 % de la capacité dynamique du vérin
par l’utilisateur. Contacter SKF.** Vitesse maximum. Cette valeur doit être limitée dans le variateur par l’utilisateur. Contacter SKF.

Vérins modulaires
23
SRSA 39••-••••-SL•
ØD
Ød
20
Ø75
M
Ø10
5
A
Øt f7ØT
22
150
194,5CLØ
147
SRSA 39••-••••-SP•ØdØD
22 150
Øt f7
M
194,5
296,5
ØT
Ø75
Ø10
5
Ø14
7
H =
420
max
B / 2
B
L
20
2
187,5 + course
276,5 + course avec rotule standard
187,5 + course
276,5 + course avec rotule standard

Vérins modulaires
24
Performances Désignation Pas Effort Effort im- Vitesse Course Sur- Capacité Puissance Taille du nominal (1) pulsionnel (2) linéaire standard (3) course (4) dynamique nominale variateur (5)
mm kN kN mm/s mm mm kN kW -
5 5 5 5
10 10 10 10
15 15 15 15 20 20 20 20
22,4 44,8 63,9 106,5 25,1 47,7 69,8 95,3 21,8 41,4 66,2 103,4 16,2 37,0 61,7 86,3
52,2 88,1 148,8 248,0* 49,3 111,0 160,7 187,2* 42,6 96,3 130,0 202,4* 31,8 72,7 121,1 169,6*
220,8** 175,0 97,2 58,3 350,0 145,8 108,3 87,5 412,5 175,0 131,3 82,5 550,0 233,3 140,0 100,0
SRSA4805-•••-X84KBSRSA4805-•••-D94KBSRSA4805-•••-X84K3BSRSA4805-•••-X84K5BSRSA4810-•••-D94KBSRSA4810-•••-X84K4BSRSA4810-•••-X86J4BSRSA4810-•••-D94K4BSRSA4815-•••-D95KBSRSA4815-•••-X84K5BSRSA4815-•••-D94K4BSRSA4815-•••-D95K5BSRSA4820-•••-D95KBSRSA4820-•••-D94K3BSRSA4820-•••-D94K5BSRSA4820-•••-D94K7B
Caractéristiques dimensionnelles Désignation A B C Ø d Ø D L M Ø t Ø T Masse (6)
Wo Wx
mm mm mm mm mm mm mm mm mm Kg Kg/100mm
192 192 192 192 192 192 192 192 192 192 192 192 192 192 192 192
212 212 212 212 212 212 212 212 212 212 212 212 212 212 212 212
174 174 204 230 174 228 230 234 174 230 234 239 174 230 239 247
- 106 - 106 - 106 - 106 - 106 - 106 - 106 - 106 - 106 - 106 - 106 - 106 - 106 - 106 - 106 - 106
- 154 - 154 - 154 - 154 - 154 - 154 - 154 - 154 - 154 - 154 - 154 - 154 - 154 - 154 - 154 - 154
326 410 457 476 410 476 536 580 472 476 580 661 472 580 599 599
SRSA4805-•••-SL/P0-T1-•-X84KBSRSA4805-•••-SL/P1-T1-•-X84KBSRSA4805-•••-SL/P0-T1-•-D94KBSRSA4805-•••-SL/P1-T1-•-D94KBSRSA4805-•••-SL/P0-T2-•-X84K3BSRSA4805-•••-SL/P1-T2-•-X84K3BSRSA4805-•••-SL/P0-T2-•-X84K5BSRSA4805-•••-SL/P1-T2-•-X84K5B
SRSA4810-•••-SL/P0-T1-•-D94KBSRSA4810-•••-SL/P1-T1-•-D94KBSRSA4810-•••-SL/P0-T2-•-X84K4BSRSA4810-•••-SL/P1-T2-•-X84K4BSRSA4810-•••-SL/P0-T2-•-X86J4BSRSA4810-•••-SL/P1-T2-•-X86J4BSRSA4810-•••-SL/P0-T2-•-D94K4BSRSA4810-•••-SL/P1-T2-•-D94K4B
SRSA4815-•••-SL/P0-T1-•-D95KBSRSA4815-•••-SL/P1-T1-•-D95KBSRSA4815-•••-SL/P0-T2-•-X84K5BSRSA4815-•••-SL/P1-T2-•-X84K5BSRSA4815-•••-SL/P0-T2-•-D94K4BSRSA4815-•••-SL/P1-T2-•-D94K4BSRSA4815-•••-SL/P0-T2-•-D95K5BSRSA4815-•••-SL/P1-T2-•-D95K5B
SRSA4820-•••-SL/P0-T1-•-D95KBSRSA4820-•••-SL/P1-T1-•-D95KBSRSA4820-•••-SL/P0-T1-•-D94K3BSRSA4820-•••-SL/P1-T1-•-D94K3BSRSA4820-•••-SL/P0-T2-•-D94K5BSRSA4820-•••-SL/P1-T2-•-D94K5BSRSA4820-•••-SL/P0-T2-•-D94K7BSRSA4820-•••-SL/P1-T2-•-D94K7B
M82x2 x prof. 40 M58x2 x prof. 40 M82x2 x prof. 40 M58x2 x prof. 40 M82x2 x prof. 40 M58x2 x prof. 40 M82x2 x prof. 40 M58x2 x prof. 40 M82x2 x prof. 40 M58x2 x prof. 40 M82x2 x prof. 40 M58x2 x prof. 40 M82x2 x prof. 40 M58x2 x prof. 40 M82x2 x prof. 40 M58x2 x prof. 40 M82x2 x prof. 40 M58x2 x prof. 40 M82x2 x prof. 40 M58x2 x prof. 40 M82x2 x prof. 40 M58x2 x prof. 40 M82x2 x prof. 40 M58x2 x prof. 40 M82x2 x prof. 40 M58x2 x prof. 40 M82x2 x prof. 40 M58x2 x prof. 40 M82x2 x prof. 40 M58x2 x prof. 40 M82x2 x prof. 40 M58x2 x prof. 40
50 50 60 60 50 60 60 60 50 60 60 60 50 50 60 60
58 58 70 70 58 70 70 70 58 70 70 70 58 58 70 70
84,788,2
109,1112,681,284,799,4
103,0
109,1112,696,7
100,2106,4110,0128,6132,1
114,4117,999,4
103,0128,6132,1152,0155,6
114,4117,9123,8127,4146,7150,3153,3156,8
5,76,45,76,45,76,45,76,4
5,76,45,76,45,76,45,76,4
5,76,45,76,45,76,45,76,4
5,76,45,76,45,76,45,76,4
0 ... 1000 0 ... 1000 0 ... 1000 0 ... 1000 0 ... 1000 0 ... 1000 0 ... 1000 0 ... 1000 0 ... 1000 0 ... 1000 0 ... 1000 0 ... 1000 0 ... 1000 0 ... 1000 0 ... 1000 0 ... 1000
5 (™2) 5 (™2) 5 (™2) 5 (™2) 5 (™2) 5 (™2) 5 (™2) 5 (™2) 5 (™2) 5 (™2) 5 (™2) 5 (™2)
5 (™2) 5 (™2) 5 (™2) 5 (™2)
198,1 198,1 198,1 198,1 207,9 207,9 207,9 207,9 207,9 207,9 207,9 207,9 207,9 207,9 207,9
207,9
6,89,86,86,89,86,87,59,8
10,76,89,8
10,710,79,89,89,8
32 32 32 32 32 32 32 32 32 32 32 32 32 32 32 32
(1) Effort nominal: peut être utilisé 100 % du temps à basse vitesse (10 % de la vitesse max.).(2) Effort impulsionnel: effort maximum sur un temps court (1 s max) à basse vitesse pour le
variateur associé.(3) Elimination de jeu pour course ≤ 600 mm maxi. Pour courses supérieures, jeu axial maxi = 20 µm. Course standard par pas de 100 mm. Pour toute course spéciale, contacter SKF.(4) Intégrée à chaque extrémité.
(5) Voir chapitre 4: Variateurs pour vérins électromécaniques.(6) Masse totale = Wo + (course/100) ™ Wx* Effort impulsionnel utilisable en statique uniquement. Pour les phases dynamiques, cette
valeur doit être limitée dans le variateur à 80 % de la capacité dynamique du vérin par l’utilisateur. Contacter SKF.
** Vitesse maximum. Cette valeur doit être limitée dans le variateur par l’utilisateur. Contacter

Vérins modulaires
25
SRSA 48••-••••-SL•
ØD
Ød
MØ
95
20
Ø t f732
180
224,5
A
Ø17
7
Ø T
L C
Ø12
5SRSA 48••-••••-SP•
ØD
Ød
M
Ø95
20
32
180
Ø17
7
Ø t f7
B
Ø12
5
346,5
224,5
L
Ø T
H =
470
max
B / 2
2
213,5 + course
323,5 + course avec rotule standard
213,5 + course
323,5 + course avec rotule standard

Vérins modulaires
26
Performances Désignation Pas Effort Effort im- Vitesse Course Sur- Capacité Puissance Taille du nominal (1) pulsionnel (2) linéaire standard (3) course (4) dynamique nominale variateur (5)
mm kN kN mm/s mm mm kN kW -
10 10 10 10 15 15 15 15 20 20 20 20
30,4 57,8 92,5 161,9 30,5 55,6 92,7 162,3 39,9 57,1 99,9 142,7
59,6 134,7 181,8 318,1* 45,7 98,2 163,7 318,7* 45,1 100,8 176,3 251,9*
275,0 116,7 87,5 50,0 462,5 216,7 130,0 52,5 666,7 216,7 123,8 86,7
SRSA6010-•••-D95KBSRSA6010-•••-X84K5BSRSA6010-•••-D94K4BSRSA6010-•••-D94K7B
SRSA6015-•••-D95VJBSRSA6015-•••-X86VJ3BSRSA6015-•••-X86VJ5BSRSA6015-•••-D94K10B
SRSA6020-•••-XA30VIBSRSA6020-•••-X86VJ4BSRSA6020-•••-X86VJ7BSRSA6020-•••-X86VJ10B
Caractéristiques dimensionnelles Désignation A B C Ø d Ø D L M Ø t Ø T Masse (6)
Wo Wx
mm mm mm mm mm mm mm mm mm Kg Kg/100mm
192
192 192 192 234 192 192 192 287 192 192 192
212 212 212 212 254 212 212 212 307 212 212 212
174 230 234 247 176 232 239 247 237 234 247 247
- 120 - 120 - 120 - 120 - 120 - 120 - 120 - 120 - 120 - 120 - 120 - 120
- 181 - 181 - 181 - 181 - 181 - 181 - 181 - 181 - 181 - 181 - 181 - 181
472
476 580 599 570 641 680 599 582 641 680 680
SRSA6010-•••-SL/P0-T1-•-D95KBSRSA6010-•••-SL/P1-T1-•-D95KBSRSA6010-•••-SL/P0-T1-•-X84K5BSRSA6010-•••-SL/P1-T1-•-X84K5BSRSA6010-•••-SL/P0-T2-•-D94K4BSRSA6010-•••-SL/P1-T2-•-D94K4BSRSA6010-•••-SL/P0-T2-•-D94K7BSRSA6010-•••-SL/P1-T2-•-D94K7B
SRSA6015-•••-SL/P0-T1-•-D95VJBSRSA6015-•••-SL/P1-T1-•-D95VJBSRSA6015-•••-SL/P0-T1-•-X86VJ3BSRSA6015-•••-SL/P1-T1-•-X86VJ3BSRSA6015-•••-SL/P0-T2-•-X86VJ5BSRSA6015-•••-SL/P1-T2-•-X86VJ5BSRSA6015-•••-SL/P0-T2-•-D94K10BSRSA6015-•••-SL/P1-T2-•-D94K10B
SRSA6020-•••-SL/P0-T1-•-XA30VIBSRSA6020-•••-SL/P1-T1-•-XA30VIBSRSA6020-•••-SL/P0-T1-•-X86VJ4BSRSA6020-•••-SL/P1-T1-•-X86VJ4BSRSA6020-•••-SL/P0-T2-•-X86VJ7BSRSA6020-•••-SL/P1-T2-•-X86VJ7BSRSA6020-•••-SL/P0-T2-•-X86VJ10BSRSA6020-•••-SL/P1-T2-•-X86VJ10B
M98x2 x prof. 40 M68x2 x prof. 40 M98x2 x prof. 40 M68x2 x prof. 40 M98x2 x prof. 40 M68x2 x prof. 40 M98x2 x prof. 40 M68x2 x prof. 40 M98x2 x prof. 40 M68x2 x prof. 40 M98x2 x prof. 40 M68x2 x prof. 40 M98x2 x prof. 40 M68x2 x prof. 40 M98x2 x prof. 40 M68x2 x prof. 40 M98x2 x prof. 40 M68x2 x prof. 40 M98x2 x prof. 40 M68x2 x prof. 40 M98x2 x prof. 40 M68x2 x prof. 40 M98x2 x prof. 40 M68x2 x prof. 40
60
60 70 70 60 60 70 70 60 60 70 70
68 68 80 80 68 68 80 80 68 68 80 80
146,7151,9131,8137,0161,0166,1185,6190,8
155,4160,6143,9149,0165,2170,4185,6190,8
225,7230,9147,1152,2171,7176,9171,7176,9
8,99,78,99,78,99,78,99,7
8,99,78,99,78,99,78,99,7
8,99,78,99,78,99,78,99,7
0 ... 1300 0 ... 1300 0 ... 1300 0 ... 1300 0 ... 1300 0 ... 1300 0 ... 1300 0 ... 1300 0 ... 1300 0 ... 1300 0 ... 1300 0 ... 1300
10 (™2) 10 (™2)
10 (™2) 10 (™2) 10 (™2) 10 (™2) 10 (™2) 10 (™2) 10 (™2) 10 (™2) 10 (™2) 10 (™2)
303,9 303,9 303,9 303,9 303,9 303,9 303,9 303,9 303,9 303,9 303,9 303,9
10,76,89,89,8
17,413,813,89,8
26,013,813,813,8
32 32 32 32 50 50 50 32 100 50 50 50
(1) Effort nominal: peut être utilisé 100 % du temps à basse vitesse (10 % de la vitesse maximum).(2) Effort impulsionnel: effort maximum sur un temps court (1 s max) à basse vitesse pour le variateur associé.(3) Elimination de jeu pour course ≤ 800 mm maxi. Pour courses supérieures, jeu axial maxi = 20 µm. Course standard par pas de 100 mm. Pour toute course spéciale, contacter SKF.(4) Intégrée à chaque extrémité.(5) Voir chapitre 4: Variateurs pour vérins électromécaniques.(6) Masse totale = Wo + (course/100) ™ Wx* Effort impulsionnel utilisable en statique uniquement. Pour les phases dynamiques, cette valeur doit être limitée dans le variateur à 80 % de la capacité dynamique du vérin
par l’utilisateur. Contacter SKF.

Vérins modulaires
27
SRSA 60••-••••-SL•
ØD
Ød
267
Ø t f7
20
32
268
Ø15
0
M
Ø20
3L C
Ø T
Ø11
5
A
SRSA 60••-••••-SP•ØD
Ød
20
32
204
B
Ø t f7
Ø20
3
Ø15
0
M
Ø T
267
389
H =
490
max
L
B / 2
Ø11
5
2
267,5 + course
389,5 + course avec rotule standard
267,5 + course
389,5 + course avec rotule standard
Vérins modulaires
28
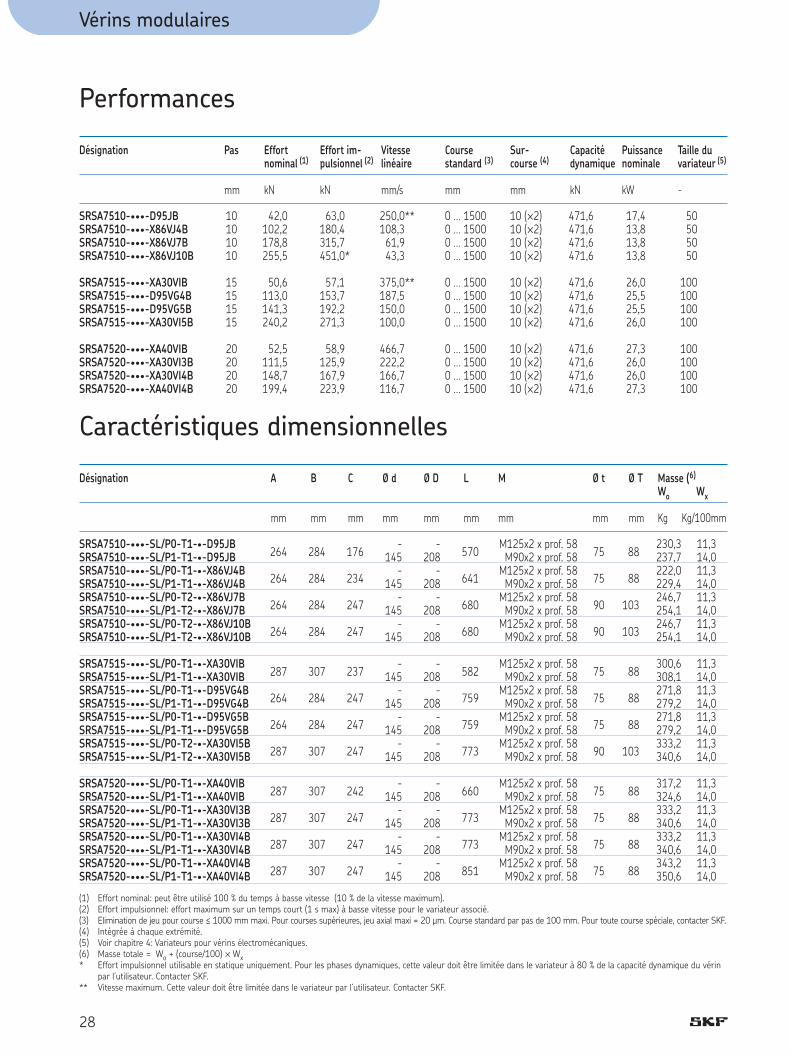
Performances Désignation Pas Effort Effort im- Vitesse Course Sur- Capacité Puissance Taille du nominal (1) pulsionnel (2) linéaire standard (3) course (4) dynamique nominale variateur (5)
mm kN kN mm/s mm mm kN kW -
10 10 10 10 15 15 15 15 20 20 20 20
42,0 102,2 178,8 255,5 50,6 113,0 141,3 240,2 52,5 111,5 148,7 199,4
63,0 180,4 315,7 451,0* 57,1 153,7 192,2 271,3 58,9 125,9 167,9 223,9
250,0** 108,3 61,9 43,3 375,0** 187,5 150,0 100,0 466,7 222,2 166,7 116,7
SRSA7510-•••-D95JBSRSA7510-•••-X86VJ4BSRSA7510-•••-X86VJ7BSRSA7510-•••-X86VJ10B
SRSA7515-•••-XA30VIBSRSA7515-•••-D95VG4BSRSA7515-•••-D95VG5BSRSA7515-•••-XA30VI5B
SRSA7520-•••-XA40VIBSRSA7520-•••-XA30VI3BSRSA7520-•••-XA30VI4BSRSA7520-•••-XA40VI4B
Caractéristiques dimensionnelles Désignation A B C Ø d Ø D L M Ø t Ø T Masse (6)
Wo Wx
mm mm mm mm mm mm mm mm mm Kg Kg/100mm
264
264 264 264 287 264 264 287 287 287 287 287
284 284 284 284 307 284 284 307 307 307 307 307
176 234 247 247 237 247 247 247 242 247 247 247
- 145 - 145 - 145 - 145 - 145 - 145 - 145 - 145 - 145 - 145 - 145 - 145
- 208 - 208 - 208 - 208 - 208 - 208 - 208 - 208 - 208 - 208 - 208 - 208
570
641
680
680
582
759
759
773
660
773
773
851
SRSA7510-•••-SL/P0-T1-•-D95JBSRSA7510-•••-SL/P1-T1-•-D95JBSRSA7510-•••-SL/P0-T1-•-X86VJ4BSRSA7510-•••-SL/P1-T1-•-X86VJ4BSRSA7510-•••-SL/P0-T2-•-X86VJ7BSRSA7510-•••-SL/P1-T2-•-X86VJ7BSRSA7510-•••-SL/P0-T2-•-X86VJ10BSRSA7510-•••-SL/P1-T2-•-X86VJ10B
SRSA7515-•••-SL/P0-T1-•-XA30VIBSRSA7515-•••-SL/P1-T1-•-XA30VIBSRSA7515-•••-SL/P0-T1-•-D95VG4BSRSA7515-•••-SL/P1-T1-•-D95VG4BSRSA7515-•••-SL/P0-T1-•-D95VG5BSRSA7515-•••-SL/P1-T1-•-D95VG5BSRSA7515-•••-SL/P0-T2-•-XA30VI5BSRSA7515-•••-SL/P1-T2-•-XA30VI5B
SRSA7520-•••-SL/P0-T1-•-XA40VIBSRSA7520-•••-SL/P1-T1-•-XA40VIBSRSA7520-•••-SL/P0-T1-•-XA30VI3BSRSA7520-•••-SL/P1-T1-•-XA30VI3BSRSA7520-•••-SL/P0-T1-•-XA30VI4BSRSA7520-•••-SL/P1-T1-•-XA30VI4BSRSA7520-•••-SL/P0-T1-•-XA40VI4BSRSA7520-•••-SL/P1-T1-•-XA40VI4B
M125x2 x prof. 58 M90x2 x prof. 58 M125x2 x prof. 58 M90x2 x prof. 58 M125x2 x prof. 58 M90x2 x prof. 58 M125x2 x prof. 58 M90x2 x prof. 58 M125x2 x prof. 58 M90x2 x prof. 58 M125x2 x prof. 58 M90x2 x prof. 58 M125x2 x prof. 58 M90x2 x prof. 58 M125x2 x prof. 58 M90x2 x prof. 58 M125x2 x prof. 58 M90x2 x prof. 58 M125x2 x prof. 58 M90x2 x prof. 58 M125x2 x prof. 58 M90x2 x prof. 58 M125x2 x prof. 58 M90x2 x prof. 58
75
75 90 90 75 75 75 90 75 75 75 75
88 88 103 103 88 88 88 103 88 88 88 88
230,3237,7222,0229,4246,7254,1246,7254,1
300,6308,1271,8279,2271,8279,2333,2340,6
317,2324,6333,2340,6333,2340,6343,2350,6
11,314,011,314,011,314,011,314,0
11,314,011,314,011,314,011,314,0
11,314,011,314,011,314,011,314,0
0 ... 1500 0 ... 1500 0 ... 1500 0 ... 1500 0 ... 1500 0 ... 1500 0 ... 1500 0 ... 1500 0 ... 1500 0 ... 1500 0 ... 1500 0 ... 1500
10 (™2) 10 (™2) 10 (™2) 10 (™2) 10 (™2) 10 (™2) 10 (™2) 10 (™2) 10 (™2) 10 (™2) 10 (™2) 10 (™2)
471,6 471,6 471,6 471,6 471,6 471,6 471,6 471,6 471,6 471,6 471,6 471,6
17,413,813,813,8
26,025,525,526,0
27,326,026,027,3
50 50 50 50 100 100 100 100 100 100 100 100
(1) Effort nominal: peut être utilisé 100 % du temps à basse vitesse (10 % de la vitesse maximum).(2) Effort impulsionnel: effort maximum sur un temps court (1 s max) à basse vitesse pour le variateur associé.(3) Elimination de jeu pour course ≤ 1000 mm maxi. Pour courses supérieures, jeu axial maxi = 20 µm. Course standard par pas de 100 mm. Pour toute course spéciale, contacter SKF.(4) Intégrée à chaque extrémité.(5) Voir chapitre 4: Variateurs pour vérins électromécaniques.(6) Masse totale = Wo + (course/100) ™ Wx* Effort impulsionnel utilisable en statique uniquement. Pour les phases dynamiques, cette valeur doit être limitée dans le variateur à 80 % de la capacité dynamique du vérin
par l’utilisateur. Contacter SKF.** Vitesse maximum. Cette valeur doit être limitée dans le variateur par l’utilisateur. Contacter SKF.

Vérins modulaires
29
SRSA 75••-••••-SL•
42
ØdØ
D
260
20
334
A
Øt f7
Ø18
0
M
Ø25
7
ØT
CL
Ø14
0
SRSA 75••-••••-SP•
42
ØD
Ød
260
20
B
Ø18
0
M
Ø25
7
H =
640
max
B / 2
ØT
Øt f7
334
464
LØ
140
2
309 + course
477 + course avec rotule standard
309 + course
477 + course avec rotule standard

Vérins modulaires
30
Le vérin électromécanique haute résolution est composé d’une vis à recirculation de rouleaux SKF au pas de 1 ou 2 mm, animée par un moteur brushless via un accouplement. Le pas très réduit des vis à recirculation de rouleaux et la chaîne cinématique simplifi ée permettent d’atteindre une pré-cision de positionnement extrême et une très haute résolution. Un réducteur planétaire est associé dans certaines confi gura-tions. La vis à rouleaux transforme le mouvement de rotation en mouvement de translation. Suivant le sens de rotation de la vis, l’écrou fait avancer ou reculer le tube de poussée, ce dernier étant relié à la charge. La vis est maintenue par des roulements à contacts obliques garantissant une grande rigidité. Pour des courses longues, la vis est guidée dans le tube de pous-sée évitant ainsi toute vibration.
Le tube de poussée et l’écrou à rouleaux sont guidés dans le tube extérieur produisant un système rigide sur le plan axial et radial. Un joint à lèvre assure l’étanchéité entre le tube de poussée et le tube extérieur. Le système anti-rotation intégré est constitué de rails de guidage. Cette conception préchargée garantie une grande rigidité en torsion et une longue durée de vie. Deux amortisseurs internes sécurisent le mécanisme pendant les phases de réglage. L’ensemble est conçu et fabri-qué pour des applications indus-trielles.
Vérins haute résolution SVSA
• Facilité d’utilisation et d’installa-tion
• Grande précision de positionne-ment
• Haute résolution • Longue durée de vie • Grande fi abilité
• Rigidité élevée• Fortes charges avec puissance
électrique réduite• Variateur programmable• Système anti-rotation intégré• Maintenance réduite.
Principaux avantages

Vérins modulaires
31
Courbes de durée de vie
SVSA 32
SVSA 40 - SVSA 50
2
Durée de vie (distance) 106 mm
Effo
rt m
oyen
(N)
Durée de vie (distance) 106 mm
Effo
rt m
oyen
(N)

Vérins modulaires
32
Performances Désignation Pas Effort Effort im- Vitesse Course Sur- Capacité Puissance Taille du nominal (1) pulsionnel (2) linéaire standard (3) course (4) dynamique nominale variateur (5)
mm kN kN mm/s mm mm kN kW -
11
22
10,7 40,6
9,6 45,8
20,6 78,3*
18,8 89,1*
10,4** 8,3
20,8** 20,0
SVSA3201-•••-X42VBSVSA3201-•••-X42V4B
SVSA3202-•••-X43VBSVSA3202-•••-X43P5B
Caractéristiques dimensionnelles Désignation A B C Ø d Ø D L M Ø t Ø T Masse (6)
Wo Wx
mm mm mm mm mm mm mm mm mm Kg Kg/50mm
91,5
98,0
91,5
98,0
111,5
118,0
111,5
118,0
107
123
107
125
- 61 - 61
- 61 - 61
-96
-96
-
96-
96
226
339
251
364
SVSA3201-•••-SL/P0-T1-•-X42VBSVSA3201-•••-SL/P1-T1-•-X42VBSVSA3201-•••-SL/P0-T2-•-X42V4BSVSA3201-•••-SL/P1-T2-•-X42V4B
SVSA3202-•••-SL/P0-T1-•-X43VBSVSA3202-•••-SL/P1-T1-•-X43VBSVSA3202-•••-SL/P0-T2-•-X43P5BSVSA3202-•••-SL/P1-T2-•-X43P5B
M42x1,5 x prof. 22 M35x1,5 x prof. 22 M42x1,5 x prof. 22 M35x1,5 x prof. 22
M42x1,5 x prof. 22 M35x1,5 x prof. 22 M42x1,5 x prof. 22 M35x1,5 x prof. 22
25
35
25
35
36
45
36
45
18,821,522,825,5
19,722,424,126,8
1,21,31,21,3
1,21,31,21,3
0 ... 1000 0 ... 1000
0 ... 1000 0 ... 1000
5 (™2)5 (™2)
5 (™2)5 (™2)
64,364,3
64,364,3
0,80,8
0,51,5
0202
0204
(1) Effort nominal: peut être utilisé 100 % du temps à basse vitesse (10 % de la vitesse maximum).(2) Effort impulsionnel: effort maximum sur un temps court (1 s max) à basse vitesse pour le variateur associé.(3) Elimination de jeu pour course ≤ 600 mm maxi. Pour courses supérieures, jeu axial maxi = 20 µm. Course standard par pas de 50 mm. Pour toute course spéciale, contacter SKF.(4) Intégrée à chaque extrémité.(5) Voir chapitre 4: Variateurs pour vérins électromécaniques.(6) Masse totale = Wo + (course/50) ™ Wx* Effort impulsionnel utilisable en statique uniquement. Pour les phases dynamiques, cette valeur doit être limitée dans le variateur à 80 % de la capacité dynamique du vérin
par l’utilisateur. Contacter SKF.** Vitesse maximum. Cette valeur doit être limitée dans le variateur par l’utilisateur. Contacter SKF.

Vérins modulaires
33
SVSA 32••-••••-SL•
ØD
17
Ød
A
Ø75
63
Ø t f7
113 M
Ø10
8
Ø50
ØT
L C
17
SVSA 32••-••••-SP•ØD
17
ØdM
Ø10
8B
L
Øt f7
Ø75
Ø50
113
140
63
ØT
H =
220
max
B / 2
17
2
257 + course
317 + course avec rotule standard
257 + course
317 + course avec rotule standard

Vérins modulaires
34
Performances Désignation Pas Effort Effort im- Vitesse Course Sur- Capacité Puissance Taille du nominal (1) pulsionnel (2) linéaire standard (3) course (4) dynamique nominale variateur (5)
mm kN kN mm/s mm mm kN kW -
11
36,362,3
70,0*121,3*
8,3 8,3**
SVSA4001-•••-X42VBSVSA4001-•••-X43P5B
Caractéristiques dimensionnelles Désignation A B C Ø d Ø D L M Ø t Ø T Masse (6)
Wo Wx
mm mm mm mm mm mm mm mm mm Kg Kg/50mm
115
115
135
135
127
127
- 71 - 71
-105
-105
318
364
SVSA4001-•••-SL/P0-T2-•-X42VBSVSA4001-•••-SL/P1-T2-•-X42VBSVSA4001-•••-SL/P0-T2-•-X43P5BSVSA4001-•••-SL/P1-T2-•-X43P5B
M48x2 x prof. 30 M44x2 x prof. 30 M48x2 x prof. 30 M44x2 x prof. 30
40
40
50
50
30,830,631,731,5
1,61,71,61,7
0 ... 1000 0 ... 1000
5 (™2)5 (™2)
79,179,1
0,81,5
0204
(1) Effort nominal: peut être utilisé 100 % du temps à basse vitesse (10 % de la vitesse maximum).(2) Effort impulsionnel: effort maximum sur un temps court (1 s max) à basse vitesse pour le variateur associé.(3) Elimination de jeu pour course ≤ 600 mm maxi. Pour courses supérieures, jeu axial maxi = 20 µm. Course standard par pas de 50 mm. Pour toute course spéciale, contacter SKF.(4) Intégrée à chaque extrémité.(5) Voir chapitre 4: Variateurs pour vérins électromécaniques.(6) Masse totale = Wo + (course/50) ™ Wx* Effort impulsionnel utilisable en statique uniquement. Pour les phases dynamiques, cette valeur doit être limitée dans le variateur à 80 % de la capacité dynamique du vérin
par l’utilisateur. Contacter SKF.** Vitesse maximum. Cette valeur doit être limitée dans le variateur par l’utilisateur. Contacter SKF.

Vérins modulaires
35
SVSA 40••-••••-SL•
ØD Ød
17
Ø12
5
Ø85
Ø60
17
131
A
79
M
Ø t f7
L C
Ø T f7
SVSA 40••-••••-SP•ØD Ød
17
Ø12
517
131
Øt f7
M
B
L
79
160
Ø60Ø
85
ØT
H =
280
max
B / 2
2
252 + course
323 + course avec rotule standard
252 + course
323 + course avec rotule standard

Vérins modulaires
36
Performances Désignation Pas Effort Effort im- Vitesse Course Sur- Capacité Puissance Taille du nominal (1) pulsionnel (2) linéaire standard (3) course (4) dynamique nominale variateur (5)
mm kN kN mm/s mm mm kN kW -
11
77,1110,2
150,1*214,4*
6,7** 5,0
SVSA5001-•••-X43P7BSVSA5001-•••-X43P10B
Caractéristiques dimensionnelles Désignation A B C Ø d Ø D L M Ø t Ø T Masse (6)
Wo Wx
mm mm mm mm mm mm mm mm mm Kg Kg/100mm
185
185
205
205
150
150
- 86 - 86
-126
-126
364
364
SVSA5001-•••-SL/P0-T2-•-X43P7BSVSA5001-•••-SL/P1-T2-•-X43P7BSVSA5001-•••-SL/P0-T2-•-X43P10BSVSA5001-•••-SL/P1-T2-•-X43P10B
M62x2 x prof. 40 M56x2 x prof. 40 M62x2 x prof. 40 M56x2 x prof. 40
50
50
59
59
49,549,249,549,2
4,85,24,85,2
0 ... 1000 0 ... 1000
5 (™2) 5 (™2)
138,5138,5
1,51,5
0404
(1) Effort nominal: peut être utilisé 100 % du temps à basse vitesse (10 % de la vitesse maximum).(2) Effort impulsionnel: effort maximum sur un temps court (1 s max) à basse vitesse pour le variateur associé.(3) Elimination de jeu pour course ≤ 600 mm maxi. Pour courses supérieures, jeu axial maxi = 20 µm. Course standard par pas de 100 mm. Pour toute course spéciale, contacter SKF.(4) Intégrée à chaque extrémité.(5) Voir chapitre 4: Variateurs pour vérins électromécaniques.(6) Masse totale = Wo + (course/100) ™ Wx* Effort impulsionnel utilisable en statique uniquement. Pour les phases dynamiques, cette valeur doit être limitée dans le variateur à 80 % de la capacité dynamique du vérin
par l’utilisateur. Contacter SKF.** Vitesse maximum. Cette valeur doit être limitée dans le variateur par l’utilisateur. Contacter SKF.

Vérins modulaires
37
SVSA 50••-••••-SL•
ØD
Ød
20
Ø75
M
Ø10
5
A
Øt f7ØT
22
150
194,5CLØ
147
SVSA 50••-••••-SP•ØdØD
22 150
Øt f7
M
194,5
296,5
ØT
Ø75
Ø10
5
Ø14
7
H =
420
max
B / 2
B
L
20
2
187,5 + course
276,5 + course avec rotule standard
187,5 + course
276,5 + course avec rotule standard
Vérins modulaires
38
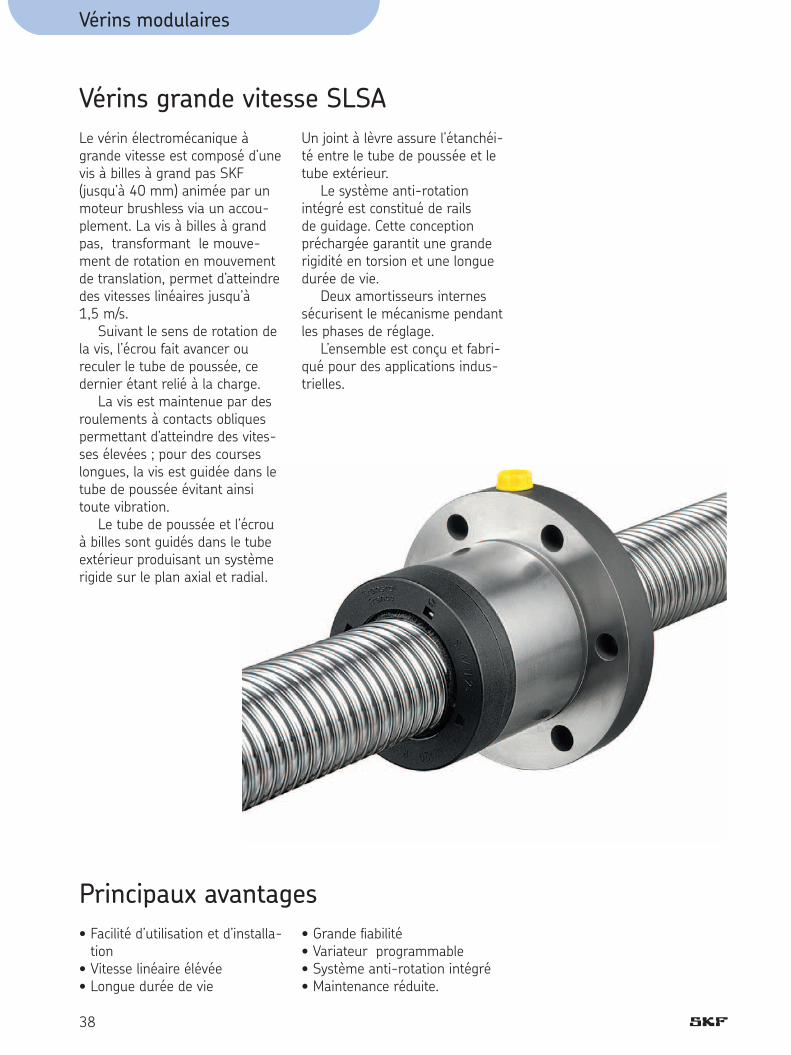
Le vérin électromécanique à grande vitesse est composé d’une vis à billes à grand pas SKF (jusqu’à 40 mm) animée par un moteur brushless via un accou-plement. La vis à billes à grand pas, transformant le mouve-ment de rotation en mouvement de translation, permet d’atteindre des vitesses linéaires jusqu’à 1,5 m/s. Suivant le sens de rotation de la vis, l’écrou fait avancer ou reculer le tube de poussée, ce dernier étant relié à la charge. La vis est maintenue par des roulements à contacts obliques permettant d’atteindre des vites-ses élevées ; pour des courses longues, la vis est guidée dans le tube de poussée évitant ainsi toute vibration. Le tube de poussée et l’écrou à billes sont guidés dans le tube extérieur produisant un système rigide sur le plan axial et radial.
Un joint à lèvre assure l’étanchéi-té entre le tube de poussée et le tube extérieur. Le système anti-rotation intégré est constitué de rails de guidage. Cette conception préchargée garantit une grande rigidité en torsion et une longue durée de vie. Deux amortisseurs internes sécurisent le mécanisme pendant les phases de réglage. L’ensemble est conçu et fabri-qué pour des applications indus-trielles.
Vérins grande vitesse SLSA
• Facilité d’utilisation et d’installa-tion
• Vitesse linéaire élévée• Longue durée de vie
• Grande fi abilité• Variateur programmable• Système anti-rotation intégré• Maintenance réduite.
Principaux avantages

Vérins modulaires
39
Courbes de durée de vie
SLSA 25 - SLSA 40
2
Durée de vie (distance) 106 mm
Effo
rt m
oyen
(N)
Vérins modulaires
40
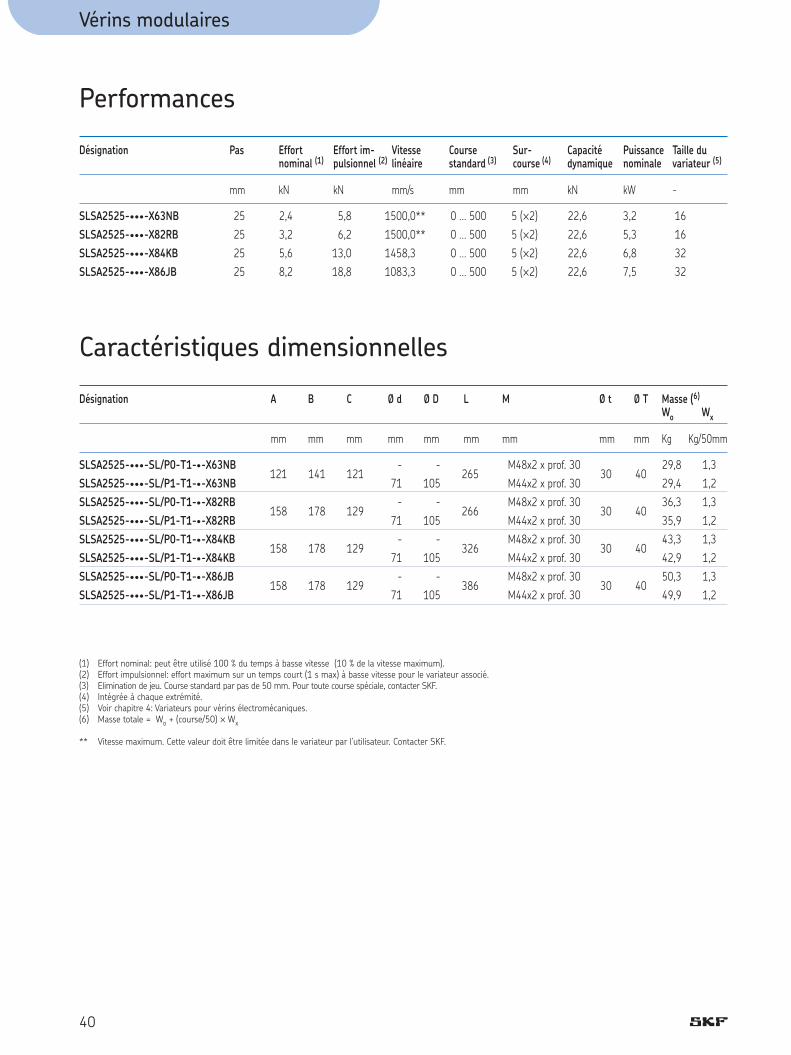
Performances Désignation Pas Effort Effort im- Vitesse Course Sur- Capacité Puissance Taille du nominal (1) pulsionnel (2) linéaire standard (3) course (4) dynamique nominale variateur (5)
mm kN kN mm/s mm mm kN kW -
25252525
2,4 3,2 5,6 8,2
5,8 6,2 13,0 18,8
1500,0** 1500,0** 1458,3 1083,3
SLSA2525-•••-X63NBSLSA2525-•••-X82RBSLSA2525-•••-X84KBSLSA2525-•••-X86JB
Caractéristiques dimensionnelles Désignation A B C Ø d Ø D L M Ø t Ø T Masse (6)
Wo Wx
mm mm mm mm mm mm mm mm mm Kg Kg/50mm
121
158 158 158
141 178 178 178
121 129 129 129
- 71 - 71 - 71 - 71
- 105 - 105 - 105 - 105
265
266 326 386
SLSA2525-•••-SL/P0-T1-•-X63NBSLSA2525-•••-SL/P1-T1-•-X63NBSLSA2525-•••-SL/P0-T1-•-X82RBSLSA2525-•••-SL/P1-T1-•-X82RBSLSA2525-•••-SL/P0-T1-•-X84KBSLSA2525-•••-SL/P1-T1-•-X84KBSLSA2525-•••-SL/P0-T1-•-X86JBSLSA2525-•••-SL/P1-T1-•-X86JB
M48x2 x prof. 30
M44x2 x prof. 30 M48x2 x prof. 30 M44x2 x prof. 30 M48x2 x prof. 30 M44x2 x prof. 30 M48x2 x prof. 30 M44x2 x prof. 30
30 30 30 30
40 40 40 40
29,829,436,335,943,342,950,349,9
1,31,21,31,21,31,21,31,2
0 ... 500 0 ... 500 0 ... 500 0 ... 500
5 (™2)5 (™2)5 (™2)5 (™2)
22,622,622,622,6
3,25,36,87,5
16163232
(1) Effort nominal: peut être utilisé 100 % du temps à basse vitesse (10 % de la vitesse maximum).(2) Effort impulsionnel: effort maximum sur un temps court (1 s max) à basse vitesse pour le variateur associé.(3) Elimination de jeu. Course standard par pas de 50 mm. Pour toute course spéciale, contacter SKF.(4) Intégrée à chaque extrémité.(5) Voir chapitre 4: Variateurs pour vérins électromécaniques.(6) Masse totale = Wo + (course/50) ™ Wx
** Vitesse maximum. Cette valeur doit être limitée dans le variateur par l’utilisateur. Contacter SKF.
Vérins modulaires
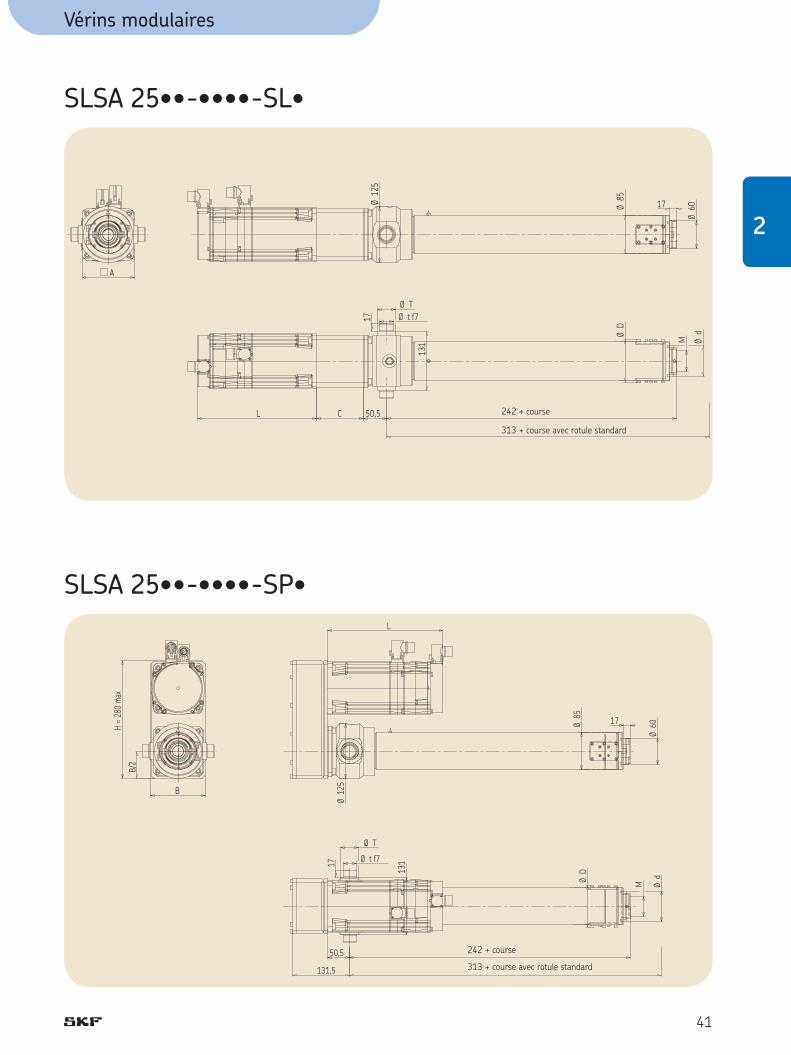
41
SLSA 25••-••••-SL•
ØD
Ød
A
L C 50,5
Ø12
517 Ø t f7
Ø T
131
Ø85
17
Ø60
M
SLSA 25••-••••-SP•
ØdØ
D
B
Ø12
517 Ø t f7
Ø T
131
Ø85 17
Ø60
M
50,5
131,5
L
H =
280
max
B/2
2
242 + course
313 + course avec rotule standard
242 + course
313 + course avec rotule standard

Vérins modulaires
42
Performances Désignation Pas Effort Effort im- Vitesse Course Sur- Capacité Puissance Taille du nominal (1) pulsionnel (2) linéaire standard (3) course (4) dynamique nominale variateur (5)
mm kN kN mm/s mm mm kN kW -
40404040
3,5 5,1 8,7 12,4
7,4 11,7 15,1 18,7
1400,0 1500,0** 1500,0** 1233,3
SLSA4040-•••-X84QBSLSA4040-•••-X86JBSLSA4040-•••-D95IBSLSA4040-•••-D95VJB
Caractéristiques dimensionnelles Désignation A B C Ø d Ø D L M Ø t Ø T Masse (6)
Wo Wx
mm mm mm mm mm mm mm mm mm Kg Kg/100mm
192
192
192
234
212
212
212
254
174
174
174
186
- 106 - 106 - 106 - 106
- 154 - 154 - 154 - 154
326
386
472
570
SLSA4040-•••-SL/P0-T1-•-X84QBSLSA4040-•••-SL/P1-T1-•-X84QBSLSA4040-•••-SL/P0-T1-•-X86JBSLSA4040-•••-SL/P1-T1-•-X86JBSLSA4040-•••-SL/P0-T1-•-D95IBSLSA4040-•••-SL/P1-T1-•-D95IBSLSA4040-•••-SL/P0-T1-•-D95VJBSLSA4040-•••-SL/P1-T1-•-D95VJB
M82x2 x prof. 40
M58x2 x prof. 40 M82x2 x prof. 40 M58x2 x prof. 40 M82x2 x prof. 40 M58x2 x prof. 40 M82x2 x prof. 40 M58x2 x prof. 40
50 50 50 50
58 58 58 58
81,179,088,186,0
110,8108,7119,4117,3
7,05,77,05,77,05,77,05,7
0 ... 1200 0 ... 1200 0 ... 1200 0 ... 1200
5 (™2) 5 (™2) 5 (™2) 5 (™2)
53,353,353,353,3
5,17,5
13,617,4
16325050
(1) Effort nominal: peut être utilisé 100 % du temps à basse vitesse (10 % de la vitesse maximum).(2) Effort impulsionnel: effort maximum sur un temps court (1 s max) à basse vitesse pour le variateur associé.(3) Elimination de jeu. Course standard par pas de 100 mm. Pour toute course spéciale, contacter SKF.(4) Intégrée à chaque extrémité.(5) Voir chapitre 4: Variateurs pour vérins électromécaniques.(6) Masse totale = Wo + (course/100) ™ Wx
** Vitesse maximum. Cette valeur doit être limitée dans le variateur par l’utilisateur. Contacter SKF.
Vérins modulaires
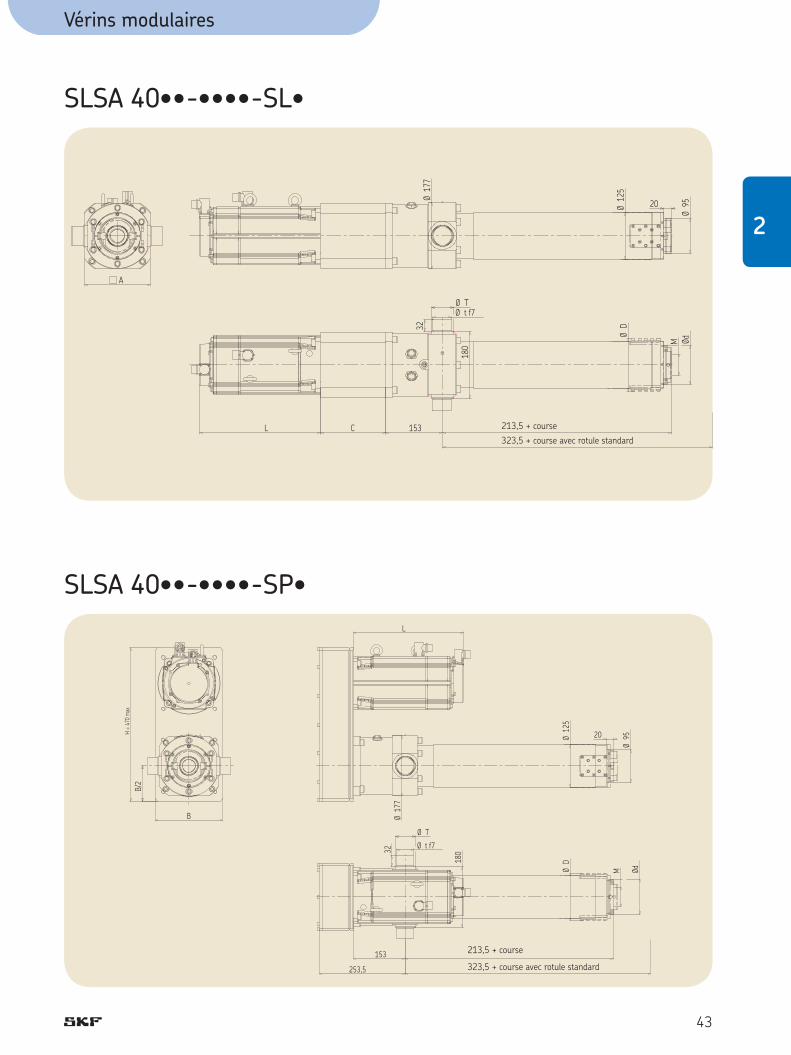
43
SLSA 40••-••••-SL•
ØD
Ød
Ø TØ t f7
32
M
A
Ø17
7L C 153
Ø12
5
Ø9520
180
SLSA 40••-••••-SP•Ø
D
Ød
Ø T
Ø t f732
M
B Ø17
7
153
Ø12
5
Ø9520
B/2
H =
470
max
L
253,5
180
2
213,5 + course323,5 + course avec rotule standard
213,5 + course
323,5 + course avec rotule standard
Vérins modulaires
44
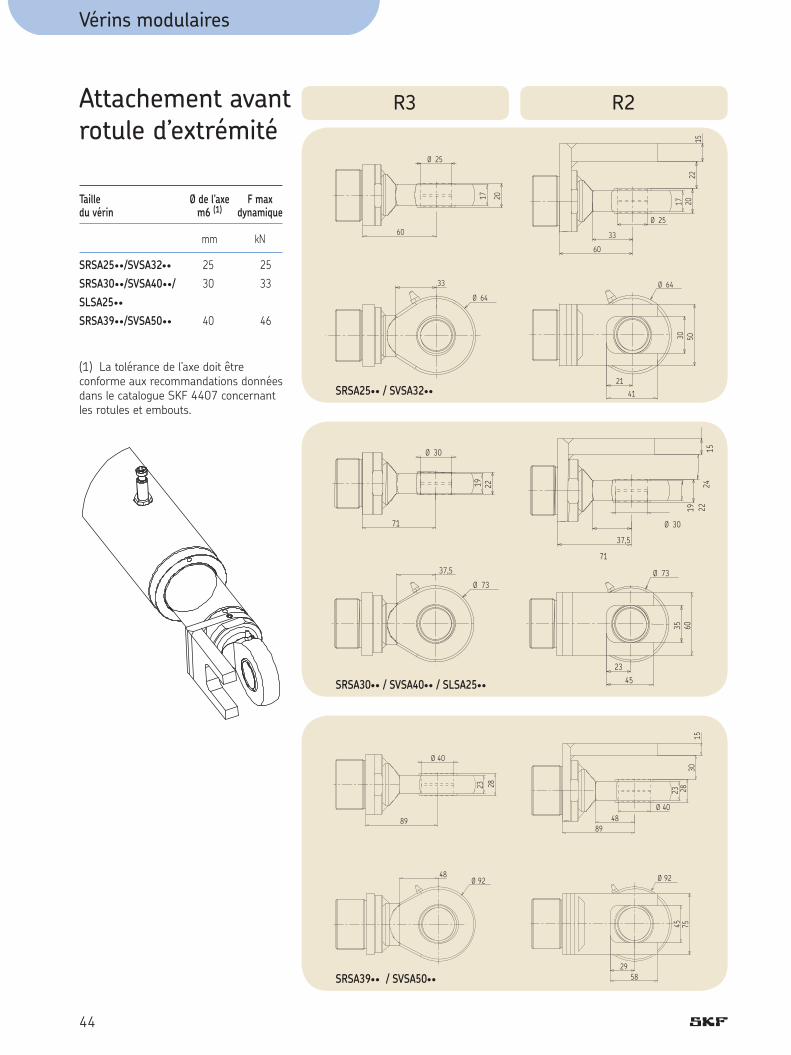
Attachement avant rotule d’extrémité
Taille Ø de l’axe F maxdu vérin m6 (1) dynamique
mm kN
2530
40
2533
46
SRSA25••/SVSA32••
SRSA30••/SVSA40••/SLSA25••
SRSA39••/SVSA50••
30 50
Ø 64
21
33
Ø 25
60
17 2022
15
33
Ø 64
Ø 25
17 20
60
41
35 60
23
45
Ø 73
15
19 2224
Ø 30
37,5
71
Ø 73
37,5
71
Ø 30
19 22
4889
Ø 40
2823
3015
45 75
2958
Ø 9248Ø 92
89
Ø 40
23 28
SRSA25•• / SVSA32••
SRSA30•• / SVSA40•• / SLSA25••
SRSA39•• / SVSA50••
(1) La tolérance de l’axe doit être conforme aux recommandations données dans le catalogue SKF 4407 concernant les rotules et embouts.
R3 R2
Vérins modulaires
45
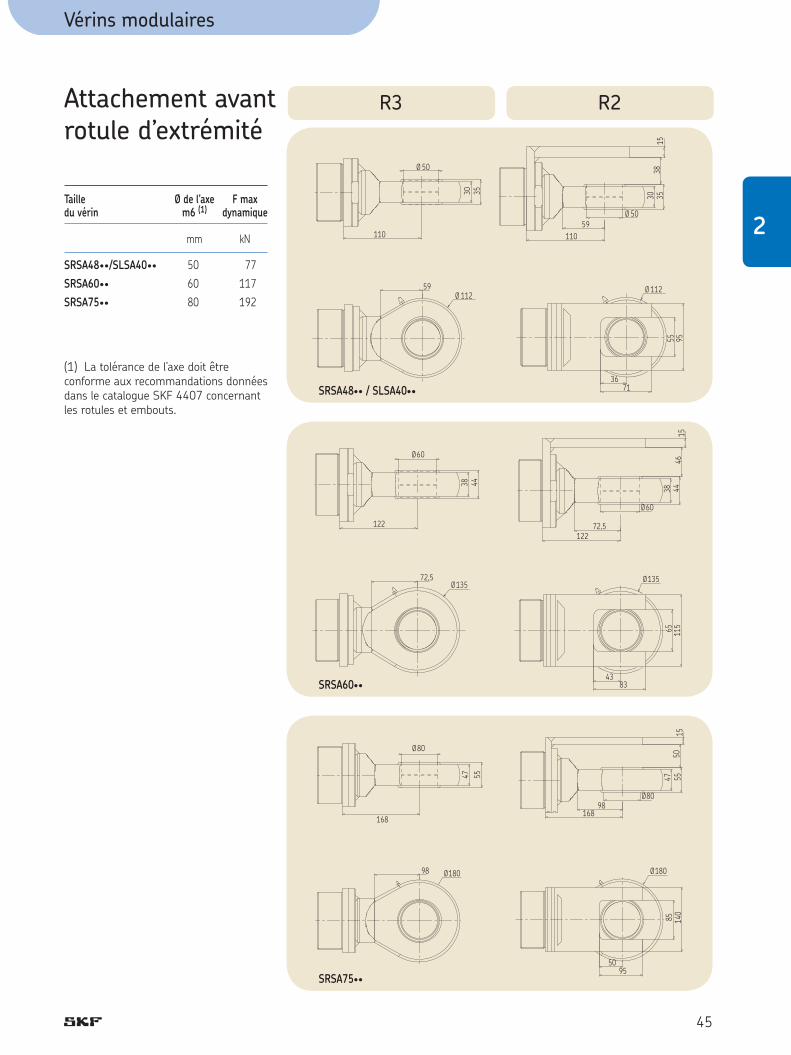
Attachement avant rotule d’extrémité
Taille Ø de l’axe F maxdu vérin m6 (1) dynamique
mm kN
506080
77117192
SRSA48••/SLSA40••
SRSA60••
SRSA75••
55 95
3671
Ø 112
1538
3530
59110
Ø 50
Ø 11259
110
Ø 50
30 35
65 115
4383
Ø135
15
38 4446
Ø60
72,5122
72,5Ø135
122
Ø6038 44
85 140
5095
Ø18098 Ø180
47 5515
50
Ø8098
168168
Ø80
47 55
SRSA48•• / SLSA40••
SRSA60••
SRSA75••
2
R3 R2
(1) La tolérance de l’axe doit être conforme aux recommandations données dans le catalogue SKF 4407 concernant les rotules et embouts.

46
Les vérins électromécaniques compacts (CEMC)
Les vérins électromécaniques compacts (CEMC) sont conçus pour fournir de hautes performances dans un encombrement réduit.

47
Vérins compacts
• Propre• Rigide• Faible consommateur d’énergie• Dimensions réduites pour un
poids faible
• Temps de réponse ultra-rapide• Sans maintenance• Robuste et fi able• Coût de fonctionnement faible.
Principaux bénéfices
• Forte intégration • Frein de sécurité • Fins de course
programmables • Système anti-rotation • Prise d’origine intégrée
• Variateur programmable• Accélération instantanée• Course maximum: 170 mm;
au-delà, consulter SKF.
Performances
Le nouveau standard du mouvement à hautes performances• Dynamiques et puissants pour une optimisation de process ou de machines: En minimisant l’inertie, le concept permet un excellent contrôle, une performance accrue, des temps de cycle considérablement amé-liorés et une forte productivité. La gamme CEMC intègre des technologies éprouvées et breve-tées, sous forme d’un ensemble compact et robuste. Cette con-ception offre des niveaux élevés d’ accélération, vitesse, précision, rigidité et répétabilité sous forte charge. Ces performances permettent ainsi une très grande fi abilité et une disponibilité machines accrue.
• Compact et ultra compact pour toutes les applications:Cette gamme de vérins apporte un concentré de puissance dans un encombrement des plus réduits. A un gain d’encombrement d’ ‘environ 40 % pour le compact et 60 % pour l’ultra-compact par rapport au vérin modulaire, s’ajoute la réduction de poids non négligeable, qui le rend idéal pour les applications fi xes ou mobiles dans lesquelles le remplacement des vérins hydrauliques est aisé. Quel que soit le besoin, les vérins CEMC sont une solution compacte et dynamique, alliant un maximum de performances et de fonctionnalités au-travers d’une grande fi abilité, d’une forte productivité et d’un coût de fonctionnement bas.
3

Vérins compacts
48
Désignation

Vérins compacts
49
Performances Désignation Pas Effort Effort im- Vitesse Course Sur- Capacité Puissance Taille du nominal (1) pulsionnel (2) linéaire standard course (4) dynamique nominale variateur (5)
mm kN kN mm/s mm mm kN kW -
3,754,006,004,006,00
4,78,75,8
13,18,7
10,323,815,926,017,3
350300450300450
CEMC1804-145-1-42JCEMC2404-•••-•-62LCEMC2406-125-•-62LCEMC2404-•••-•-63ICEMC2406-125-•-63I
145125-135-170
125125-135-170
125
1 (™2)1 (™2)1 (™2)1 (™2)1 (™2)
26,661,061,061,061,0
1,62,62,63,33,3
0816161616
Gamme compacte
Performances Désignation Pas Effort Effort im- Vitesse Course Sur- Capacité Puissance Taille du nominal (1) pulsionnel (2) linéaire standard course (4) dynamique nominale variateur (5)
mm kN kN mm/s mm mm kN kW -
446464646
9,014,19,4
14,19,4
27,418,339,526,3
17,928,218,828,218,853,135,483,455,6
353320480266400266400266400
CEMC2104-170-•-D63LCEMC2404-•••-2-D82PCEMC2406-•••-2-D82PCEMC3004-•••-2-D82PCEMC3006-•••-2-D82PCEMC3004-•••-2-D84HCEMC3006-•••-2-D84HCEMC3004-•••-2-D86FCEMC3006-•••-2-D86F
17090-17090-17090-17090-17090-17090-17090-17090-170
1 (™2)1 (™2)1 (™2)1 (™2)1 (™2)1 (™2)1 (™2)1 (™2)1 (™2)
48,161,061,0
105,0105,0105,0105,0105,0105,0
2,34,74,73,93,96,26,26,66,6
161616161632325050
Gamme ultra-compacte 3
(1) Effort nominal: peut être utilisé 100% du temps à basse vitesse (10 % de la vitesse maximum).(2) Effort impulsionnel: effort maximum sur un temps court (1 s max) à basse vitesse pour le variateur associé.(4) Intégrée à chaque extrémité.

Vérins compacts
50

Vérins compacts
51
CEMC1804-145-1-42J - Modèle 1
46,5
90
L
19
56,5
56,5
5
Ø25
f7-0
,020
-0,0
41(
)
M -6H12
3,5
Ø38
,5
Ø60
f7-0
,03
-0,0
6(
)
6
Caractéristiques dimensionnellesGamme compacte Désignation Course L* Masse** standard
mm mm Kg
145 376,8 9,1CEMC1804-145-1-42J
* pour l’option frein, ajouter 50,7 mm** pour l’option frein, ajouter 0,8 kg
3
profondeur 27
(™4) M6-6H profondeur 12
Vérins compacts
52
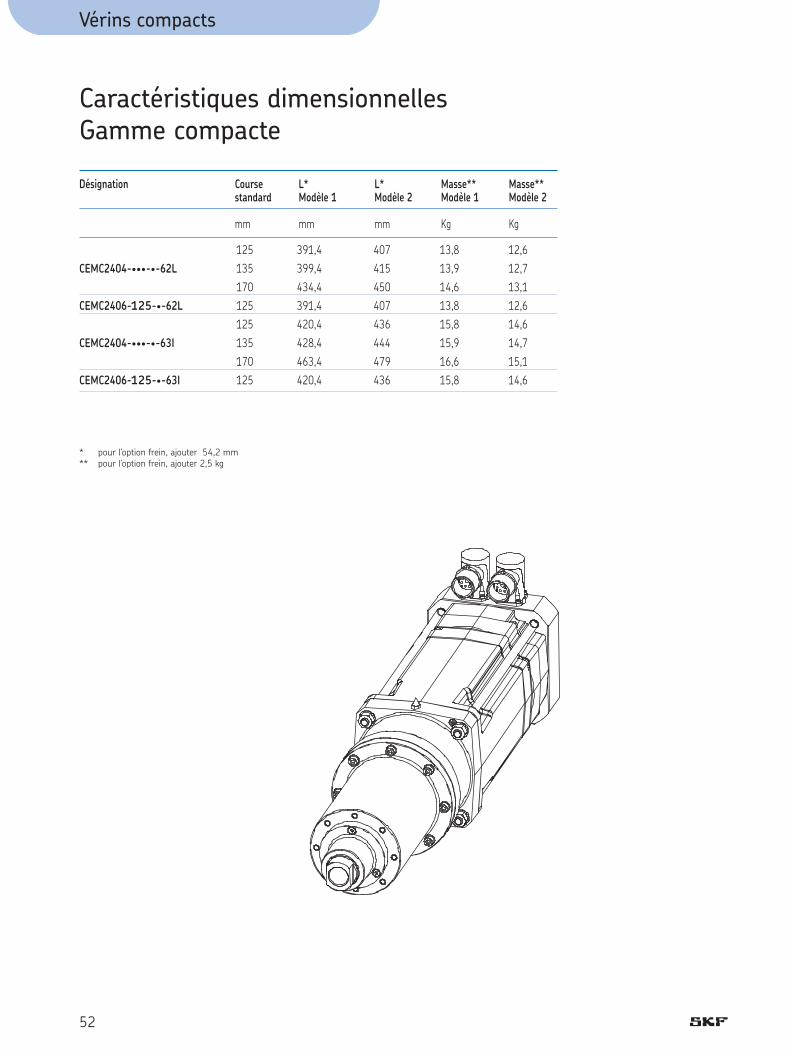
Caractéristiques dimensionnellesGamme compacte Désignation Course L* L* Masse** Masse** standard Modèle 1 Modèle 2 Modèle 1 Modèle 2
mm mm mm Kg Kg
125135170125125135170125
391,4399,4434,4391,4420,4428,4463,4420,4
407415450407436444479436
13,813,914,613,815,815,916,615,8
12,612,713,112,614,614,715,114,6
CEMC2404-•••-•-62L
CEMC2406-125-•-62L
CEMC2404-•••-•-63I
CEMC2406-125-•-63I
* pour l’option frein, ajouter 54,2 mm** pour l’option frein, ajouter 2,5 kg

Vérins compacts
53
CEMC24••-•••-1-6•• - Modèle 1
54,5
13
L
S/P
23
Ø30
f7-0
,020
-0,0
41(
)M
x1,5
20
120
Ø90
Ø43
,5Ø
65 f7
-0,0
3-0
,06
()
10
CEMC24••-•••2-6•• - Modèle 2
120
111
25 48
65
L
48,1
1613,5Ø
30
Ø 24 H7 +0,021 0( )
Ø65
Ø 20
3
prof
onde
ur 5
5
(8™) M5-6Hprofondeur 10on Ø 77
rotule SKF SA20C

Vérins compacts
54
Caractéristiques dimensionnellesGamme ultra-compacte Désignation Course L* Masse** Masse** Masse** standard Modèle 1 Modèle 2 Modèle 3
mm mm Kg Kg Kg
170 voir plans 18,6 19,3 22,5CEMC2104-170-•-D63L
* pour l’option frein, pas de longueur supplémentaire** pour l’option frein, ajouter 0,6 kg
CEMC2104-170-1-D63L - Modèle 1
90
20,5
11
Ø30
6
347,5
1643,656,5
Ø11
7
Ø 146
120
Ø 107
Ø60
f7-0
,03
-0,0
6(
)
(4x) M 6
20
5
M -6Hdepth 20
16
option: refroidissement G1/4’’ ™ 12 mm profondeur

Vérins compacts
55
CEMC2104-170-2-D63L - Modèle 2
90 49,620,5
385,5
48
33020
Ø 50
170
11
Ø30
Ø11
7
Ø 146
120
Ø 107
(2x) Ø 20 g6 -0,007-0,020( )
R2
Ø 50
20
Ø 26 H7 +0,021 0( )
CEMC2104-170-3-D63L - Modèle 3
20,5
431,9
60
90
11
216
84
Ø30
27,5
Ø 107
20
110
56,5
50
56,5
76
110
264
Ø11
7
Ø 146
120
Ø60
f7-0
,03
-0,0
6(
)
(4x) M 6
(4x) M 8
3
option: refroidissement G1/4’’ ™ 12 mm profondeur
option: refroidissement G1/4’’ ™ 12 mm profondeur

Vérins compacts
56
Caractéristiques dimensionnellesGamme ultra-compacte
CEMC24••-•••-2-D82P - Modèle 2
L
Lt
64
Ø12
2
Ø30
1613,5
155
80
191
20
Ø 175
Ø 96
(2x) Ø 20 g6 -0,007-0,020( )
Ø 72
R2
Ø 20
Désignation Course L* Lt* Masse** standard
mm mm mm Kg
90 170 90 170
210 290 210 290
345 425 345 425
19,9 21,5 19,9 21,5
CEMC2404-•••-2-D82P
CEMC2406-•••-2-D82P
* pour l’option frein, pas de longueur supplémentaire** pour l’option frein, ajouter 0,6 kg
rotule SKF SA20C
Vérins compacts
57
3
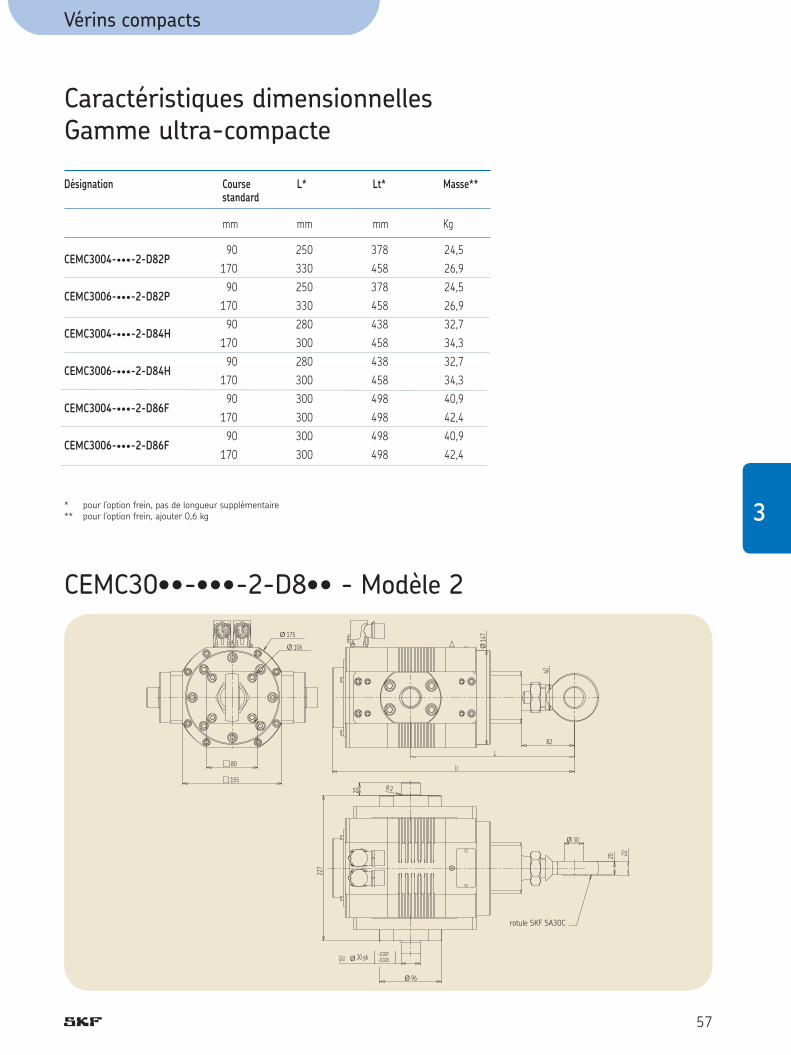
Caractéristiques dimensionnellesGamme ultra-compacte
CEMC30••-•••-2-D8•• - Modèle 2
L
Lt
82
4
0
2220
155
80
227
20
Ø 175
Ø 106
(2x) Ø 30 g6 -0,007-0,020( )
Ø 96
R 2
Ø14
7
Ø 30
* pour l’option frein, pas de longueur supplémentaire** pour l’option frein, ajouter 0,6 kg
Désignation Course L* Lt* Masse** standard
mm mm mm Kg
90 170 90 170 90 170 90 170 90 170 90 170
250 330 250 330 280 300 280 300 300 300 300 300
378 458 378 458 438 458 438 458 498 498 498 498
24,5 26,9 24,5 26,9 32,7 34,3 32,7 34,3 40,9 42,4 40,9 42,4
CEMC3004-•••-2-D82P
CEMC3006-•••-2-D82P
CEMC3004-•••-2-D84H
CEMC3006-•••-2-D84H
CEMC3004-•••-2-D86F
CEMC3006-•••-2-D86F
rotule SKF SA30C

Vérins compacts
58
Option: capteur d’effort intégré
Avantages:• Précision de mesure• Pas de câble externe• Conditionneur (carte électroni-
que) intégré dans le vérin• Connections simples• L’option capteur ne modifi e pas
l’encombrement du vérin.
Bénéfi ces client:• Amélioration de la qualité grâce
au contrôle continu du process • Forte productivité du fait de
l’optimisation du process (pilotage en boucle fermée).
Applications:• Tout process d’automatisation
industrielle• Presses• Bancs d’essais• Et toute autre application
demandant une précision de l’effort.
Situé près du point d’application de la force, ce capteur permet des mesures précises de l’effort fourni par le vérin.
Spécifi cations techniques:• Effort nominal (Fnom ): 14 kN• Précision: +/-3 % of Fnom• Plage de température: + 10…70 °C• Tension d’alimentation: 24 V DC +/-10 %• Signal de sortie: 1 V = 2 kN• Réglage du zero: avec potentiomètre• Réglage de la pente: avec potentiomètre.
16000
14000
12000
10000
8000
6000
4000
2000
00 2000 4000 6000 8000 10000 12000 14000 16000
____ courbe de référence ____ courbe du capteur d’effort
Signal de sortie du capteur d’effort
Effo
rt (N
)
Effort (N)

Vérins compacts
59
3
Option: système de refroidissement intégré
Avantages:• Gain de performances• L’option refroidissement ne
modifi e pas l’encombrement du vérin.
Bénéfi ces client:• Accroissement de la productivité • Stabilisation de la température
du vérin.
Applications:• Tout process d’automatisation
industrielle• Toutes machines à fortes
cadences.
Le système de refroidissement à eau, complètement intégré, permet une optimisation des performances et de la productivité.
____ sans refroidissement ____ avec refroidissement ____ T° ambiante
Température du vérin compact (conditions de fonctionnement identiques)
temps (s)
60
Variateurs positionneurs pourvérins électromécaniques
Les variateurs positionneurs intègrent dans une unité compacte les fonctions de variateur de vitesse, de positionneur, et d’automate programmable avec possibilité de communication CANopen ou PROFIBUS.
61
Variateurs positionneurs
4
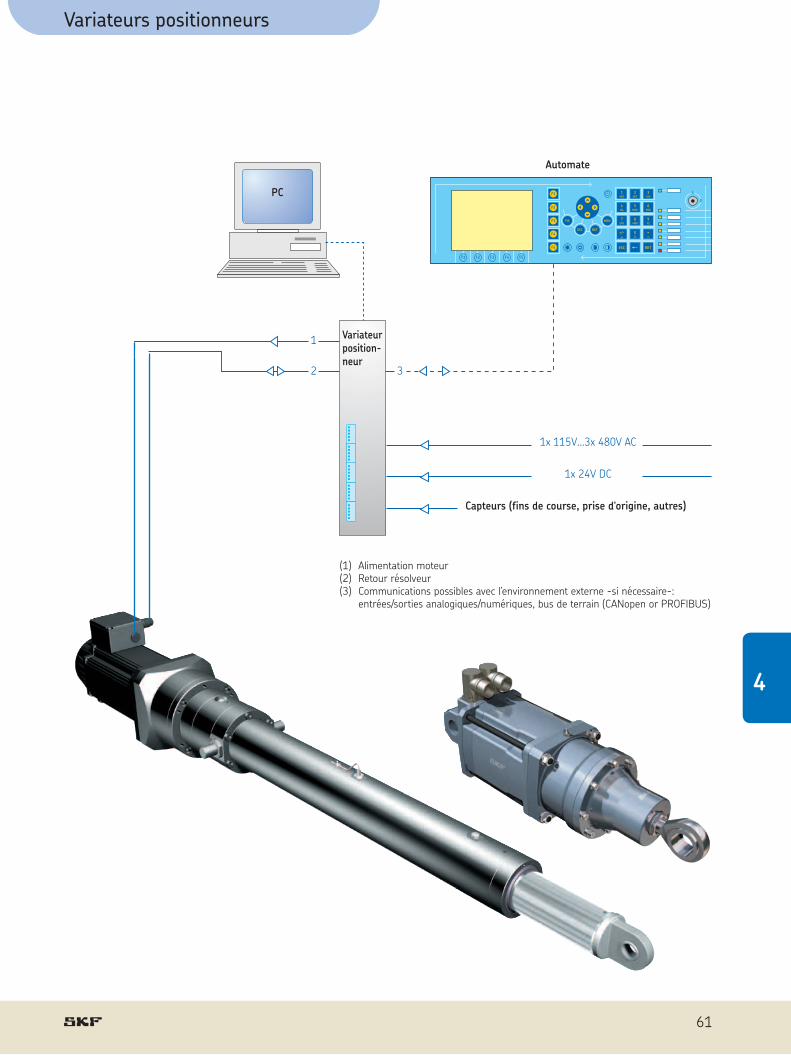
(1) Alimentation moteur(2) Retour résolveur(3) Communications possibles avec l’environnement externe -si nécessaire-: entrées/sorties analogiques/numériques, bus de terrain (CANopen or PROFIBUS)
Variateurs positionneurs
62
Bande passante en courant 600 Hz à -3dB Bande passante en position Jusqu’à 60 Hz Indice de protection IP 20 suivant CEI 529 Protections électriques Isolation galvanique du pont de puissance Protection en courant moyen suivant le calibre du variateur Protection en courant impulsionnel du variateur et du moteur Protection en courant effi cace du moteur Protection contre les courts-circuits en sortie de pont Protection contre le survoltage du réseau Autres surveillances Erreur de poursuite Température moteur Température variateur Défaut résolveur Alimentation frein Fins de course Température de stockage -30 °C - +85 °C
Alimentation 380/400 V AC ± 10 %, triphasé; 50/60 Hz (1)
Température de 0 à 40° (au-delà déclassement de la puissance utile fonctionnement de 20 % par tranche de 10 °C - maxi 60 °C) Freinage Résistance interne ou externe ou renvoi réseau
suivant modèle (voir tableau 2) Entrées/Sorties 1 Entrée analogique (14 bits, +/- 10 V diff.) 1 Sortie analogique, confi gurable (+/- 10V - conversion D/A = N/A 10 bits) 16 Entrées logiques optocouplées (dont 4 interrupti-
ves), confi gurables 8 Sorties logiques optocouplées, confi gurables Standard: entrée résolveur Option: entrée résolveur absolu multi-tours Autres options: (2)
* Entrée codeur incrémental * Sortie émulation codeur incrémental * Entrée codeur SinCos Bus de terrain CANopen (DS 301 et DSP 402) PROFIBUS (DP-V0 et DP-V1; PROFIdrive V2.0 et
PROFIdrive V3.0 Classes 3 et 4)
Spécifications techniques
(1) Autre tension sur demande(2) Voir accessoires

Variateurs positionneurs
63
Le marquage “CE” est apposé en face avant. Les variateurs positionneurs sont marqués “CE” au titre de la directive européenne 89/336/CEE modifi ée par la directive 93/68/CEE traitant de la compatibilité électromagnétique.
Cette directive appelle les normes génériques harmonisées EN50081-2 de décembre 1993 (Compatibilité électromagnétique - Norme générique d’émission - Environnement industriel) et EN50082-2 de juin 1995 (Compatibilité électromagnétique - Norme générique d’immunité - Environnement industriel).
Conformité aux normes:
Calibre du Courant Courant Puissance Pertes maxi. dans Dimensions variateur nominal impulsionnel mécanique le variateur H W D de sortie de sortie (3x400V) (à puissance maxi) - Â Â kW W mm mm mm
W
D
H
Spécifi cation détailléeTableau 1 - Performances et dimensions
020408163250
100
248
163250
100
48
16326480
120
0,751,5
36
122040
3050
100200400700
1000
328328328328328438474
7878
110133168202483
222222222222226244343
Calibre du Type Valeur de Capacité de Capacité de Puissance % maxi du variateur la résistance freinage maxi, freinage maxi, impulsionnelle, temps de puissance puissance temps maxi. cycle total permanente impulsionnelle - - W kW kW s %
Tableau 2 - Capacité de freinage
020408163250
100
220220824127
--
0,060,060,250,500,70
20,0040,00
2,22,2
612182040
0,10,10,20,20,2
--
2,72,74,34,34,3
--
(1) Option: utilisation de la résistance externe (voir accessoires) 4
résistance internerésistance internerésistance internerésistance internerésistance interne (1)
réinjection sur le réseauréinjection sur le réseau
Variateurs positionneurs
64
Un haut niveau d’intégrationLes variateurs positionneurs intègrent les fonctions de varia-teur de vitesse, d’asservissement de position et d’automate pro-brammable dans un ensemble compact. Cette intégration permet l’utilisation d’un seul langage de programmation, une réduction du coût global de l’application, ainsi qu’une mise en œuvre et une utilisation simplifi ées.
Une structure multi-tâches temps réel
L’ensemble de la gamme est développé autour d’une même structure qui inclut: - un programme de mouve-
ment - un programme automate
tâche de fond: traitement d’entrées/sorties type cap-teurs actionneurs (sécurités machine par exemple)
- un programme automate rapide, à temps de cycle fi xe pour le traitement périodique d’une information
- des programmes particuliers déclenchés par des entrées interruptives.
Cette structure travaille en temps réel. Il n’y a donc pas préparation de bloc à l’avance et les paramètres type destination, vitesse et accélération peuvent être modifi és pendant le mouve-ment
Des mouvements rapides et précisLes variateurs positionneurs intègrent des caractéristiques poussées d’asservissement: - résolution élevée de la
mesure de position (65536 incréments/tour)
- fi ltre d’asservissement - reconstruction de trajectoires
maître et esclave et utilisa-tion de prédicteurs.
Ainsi, grâce aux actions d’anticipation, les mouvements deviennent précis, même à basse vitesse et sous forte charge; l’erreur de poursuite, sur toute la plage de vitesse, reste quasi nulle pour une réponse optimale.
Une intervention rapide en cas de panne - le fi rmware ainsi que les
paramètres spécifi ques à l’appareil (temps de fonction-nement, derniers défauts, numéro de série de l’appa-reil) sont sauvegardés en mémoire non volatile dans l’appareil.
- les paramètres machine (paramètres liés au calibre du variateur, au moteur, au positionnement et à la confi guration de la machine) et les programmes utilisateur (source et code exécutable) sont sauvegardés en mé-moire non volatile.
Une surveillance interne com-plète pour un fonctionnement sûrChaque variateur positionneur intègre une surveillance de la plupart des actions et paramètres importants du servo-système: tensions, courants, température, mouvements... pour une utilisa-tion sûre.
Fonctions

Variateurs positionneurs
65
Motion Explorer est un logiciel fonctionnant sous Windows utilisé pour le paramétrage, le réglage, la surveillance et la maintenance. Il a été développé pour fonctionner sur PC sous Windows 98, Millenium, NT 4.0, 2000, XP. Les fonctions détaillées sont les suivantes:
Logiciel Motion Explorer
Outil aide au diagnosticDiagnostic incidentMise à jour Firmware
Outil de contrôle d’exécutionDébogueur pour mise au point des programmes
Outil générateur de stimuliGénérateur de fonction pour réglage des paramètres d’asservissement
Outil observateur de variablesObservateur de variables pour la visualisation et le forçage de variables internes
Outil de réglage des paramètresParamètre axe, moteur, résolveur, E/Ssélection du moteur dans une base de donnéeAssistant de réglage d’asservissementCalage résolveur
Outil Editeur de programmesProgrammation très puissante.Accès à tous les paramètres en temps réel.Bibliothèque de programmes d’application et d’exemples.Langage pseudo-basicCompilation avec localisation d’erreurs
Outil oscilloscope4 voiesBase de temps réglable de 5 ms/div à 200 s/divTrigger réglable (seuil + front)Mesures (RMS, crête-crête, moyenne, min, max).Profondeur de trace 200 à 2000 points (50 ms à 5,5 heures).
4

Variateurs positionneurs
66
Ensemble de paramétrageCet ensemble de paramétrage est nécessaire pour défi nir la confi gu-ration du variateur positionneur. Il peut éventuellement servir pour les réglages, la surveillance ou la maintenance. Il inclut l’équi-pement électrique reliant le variateur positionneur au PC (fonctionnant sous Windows) et le logiciel Motion Explorer. En fonction du bus de terrain sélectionné pour le variateur positionneur, l’ensemble de paramétrage se présentera sous une des confi gurations décrites ci-dessous:
• Ensemble de paramétrage pour variateur positionneur CANopen: Référence: SFWPVXMCC compre-nant: - logiciel Motion Explorer
(CDRom) - câble CANopen (longueur: 1m) - interface CANopen-RS232 - câble RS232 (longueur: 1,8 m)
• Ensemble de paramétrage pour variateur positionneur CANopen, montage sur rail DIN: Référence: SFWPVXMCCD comprenant: - logiciel Motion Explorer
(CDRom) - câble CANopen (longueur: 1m) - interface CANopen-RS232
(montage sur rail DIN) - câble RS232 (longueur: 1,8 m)
• Ensemble de paramétrage pour variateur positionneur Profi bus: Référence: SFWPVXMCP com-prenant:
- logiciel Motion Explorer (CDRom)
- câble Profi bus (longueur: 1m) - interface Profi bus-USB - câble USB (longueur: 1,8 m)
Filtres réseauLe variateur positionneur est conforme à la norme EN55011 s’il est équipé d’un fi ltre sur l’entrée puissance. Le choix du fi ltre dépend du calibre du contrôleur, suivant tableau ci-dessous:
Résistance de freinage externe (seulement pour le variateur positionneur de calibre 32)Référence: RSTPVX32Spécifi cations: - valeur de résistance: 27 Ω - capacité de freinage maxi-
mum - puissance perma-nente: 2 kW
- capacité de freinage maxi-mum - puissance impulsion-nelle: 18 kW
- puissance impulsionnelle: temps maximum d’utilisa-tion: 0,5 s
- puissance impulsionnelle - % max. de temps sur un cycle total: 12 %
Carte en option pour le varia-teur positionneurSi nécessaire, il est possible d’ajouter au variateur position-neur l’une des 3 cartes ci-après:• Référence BOAPVX39Désignation: sortie émulation codeur incrémentalDescription: cette carte option-nelle, intégrée au variateur positionneur, convertit le signal du résolveur du vérin en une série d’impulsions identiques à celles d’un codeur incrémental:A, A, B, B ; Top 0, Top 0.
• Référence: BOAPVX38Désignation: entrée codeur externeDescription: cette carte option-nelle, intégrée au variateur positionneur, est utilisée pour connecter un codeur incrémental externe qui peut être utilisé: - soit comme axe de référence
de synchronisation avec un composant externe
- soit comme système de mesure de position si la mesure donnée par le résolveur du vérin ne con-vient pas (exemple: si la position doit être mesurée sur la pièce déplacée par le vérin).
ATTENTION: dans ce cas, il est nécessaire de bien connecter le résolveur du vérin.
• Référence: BOAPVX45Désignation: encodeur SinCos, option entréeDescription: cette carte en option, intégrée au variateur position-neur, sert à connecter un enco-deur SinCos, qui sert d’unité de mesure de position, pour des applications nécessitant à la fois une vitesse de rotation élevée et une haute résolution.
Accessoires
Calibre du Référence du fi ltre variateur
02 FLTPVX3PH016A
04 FLTPVX3PH016A
08 FLTPVX3PH016A
16 FLTPVX3PH016A
32 FLTPVX3PH036A
50 FLTPVX3PH036A
100 FLTPVX3PH064A

Variateurs positionneurs
67
Fins de courseLes fi ns de course intégrées au vérin peuvent être reliées direc-tement au variateur positionneur. Les caractéristiques des fi ns de course sont les suivantes: - technologie: capteur inductif - concept électrique: DC PNP - sortie: normalement fermée - tension de fonctionnement
(V DC): 10..36 - courant de sortie (mA): 100 - chute de tension (V): < 2,5 - consommation électrique
(mA): < 10 (24 V) - protection: IP68
Capteur prise d’origineLe capteurde prise d’origine intégré au vérin peut être relié directement au variateur posi-tionneur. Les spécifi cations du capteur de prise d’origine sont les suivan-tes: - technologie: capteur inductif - concept électrique: DC PNP - sortie: normalement ouverte - tension de fonctionnement
(V DC): 10..36 - courant de sortie (mA): 100 - chute de tension (V): <2,5 - consommation électrique
(mA): < 10 (24 V) - protection: IP68
4
Capteur prise d’origine
Fins de course

68
Vérins fortes chargesLes vérins fortes charges (RSJA) associent une vis à rouleaux satellites et un réducteur roue et vis sans fin. Cette conception est destinée à des applications de monte et baisse de charges importantes avec une très grande fiabilité. Le rendement, fonction du rapport de réduction du système roue et vis sans fin, peut atteindre 70 %, ce qui permet l’optimisation de la puissance électrique à mettre en œuvre.

69
Vérins fortes charges
Le concept du vérin est basé sur le principe de l’écrou tournant. Un système roue et vis sans fi n entraîne l’écrou en rotation, pro-voquant la translation de la vis. La roue est construite en bronze à très haute qualité de frottement ce qui permet d’atteindre un très bon rendement. Elle est montée sur une combinaison de butées à rouleaux permettant la reprise de fortes charges axiales. La con-ception standard du réducteur est prévue pour une charge axiale en compression uniquement, mais elle peut être adaptée pour une application nécessitant une reprise d’effort dans les deux directions. La très grande capacité de charge des vérins s’explique par l’utilisation de vis à rouleaux satellites SKF de fort diamètre (Ø 75 à 180 mm). La conception en acier mé-cano-soudé du réducteur lui confère une très grande résis-tance, très appréciée dans les environnements hostiles. Un tube en acier protège la partie inférieure de la vis, et permet l’intégration du système d’anti-rotation et de guidage de la partie mobile. La lubrifi cation du mécanisme est assurée par un bain d’huile, ce qui est essentiel dans un fonc-tionnement continu, comme c’est
le cas dans l’industrie sidérurgi-que. Sur demande, le réducteur peut être monté sur une embase rotulante, ce qui permet d’amé-liorer l’alignement du vérin, et de minimiser les efforts radiaux liés au montage. La liaison du vérin sur la structure client peut également être équipée d’une rotule, ce qui permet un auto-ali-gnement de celui-ci en fonction-nement. Des souffl ets métalliques té-lescopiques assurent une protec-tion de la partie supérieure de la vis. Pour des applications haute température, des souffl ets Kevlar peuvent-être installés. Pour des applications dans un environnement moins exigeant, un design simplifi é peut être proposé.
Caractéristiques du vérin fortes charges
Au travers d’une trentaine d’an-nées de partenariat avec l’indus-trie sidérurgique, SKF n’a cessé d’améliorer l’art du mouvement linéaire dans un environnement très exigeant, en proposant des
vérins intégrant les caractéristi-ques uniques de la vis à rouleaux.Dans l’industrie sidérurgique, plus de 60 coulées continues, dans 23 pays, fonctionnent depuis des années sans défaillance grâce aux
vérins fortes charges. La durée de vie moyenne de ces action-neurs est d’environ 12 années, et peut même atteindre plusieurs dizaines d’années suivant les spécifi cations de l’application.
Expérience
5

Vérins fortes charges
70
Performances
Encombrement Dimensions RSJA75 RSJA99 RSJA120 RSJA150 RSJA180
ABCDEFGHIJKLMNOPQRSTUV
W + courseX + course
YZ
AAABACAD
455 245 210 420 210 210 610 305 305 110 160 200 50 25 520 20 50 310 125 85 210 460 205 855 180 235 300 350 420 40h6
595 300 295 590 295 295 690 345 345 110 200 200 50 25 575 20 50 375 165 85 250 465 230 920 210 260 405 460 590 50h6
670 360 310 620 310 310 850 425 425 140 250 200 50 25 635 20 50 430 165 85 250 510 250 1010 260 280 430 500 620 60h6
760 410 350 700 350 350 950 475 475 140 280 200 50 25 685 20 50 480 205 85 290 535 280 1105 260 310 510 580 700 70h6
930 510 420 840 420 420 1170 585 585 170 355 200 50 25 785 20 50 590 235 85 320 620 310 1250 260 340 650 720 840 90h6
Capacité dynamique (kN)Vis à rouleaux - Ø (mm)Vis à rouleaux - Avance (mm)Entraxe réducteur (K - mm)Rapports de réduction standard (i)Avance par tour moteur (mm)
RSJA75 RSJA99 RSJA120 RSJA150 RSJA180
5727520
1605-7,5-10-15
20 / i
7999935
2005-7,5-10-15
35 / i
86312025
2505-7,5-10-15
25 / i
159615025
2807,5-10-15
25 / i
196218030
3557,5-10-15
30 / i

Vérins fortes charges
71
5

Vérins fortes charges
72
• Déplacement de très fortes charges
• Capacités de charges élevées• Rendement élevé• Solution éprouvée• Conception robuste pour envi-
ronnements diffi ciles
• Irréversibilité possible• Possibilité de montages combi-
nés.
Principaux bénéfices
ApplicationsDans l’industrie sidérurgique, pour les coulées continues, la sélection d’un vérin fortes charges est la suivante:
Charge dynamique Sélection
25 tonnes RSJA75
45 tonnes RSJA99
50 tonnes RSJA120
70 tonnes RSJA150
90 tonnes RSJA180

Vérins fortes charges
73
5

Cahier des charges SKFpour vérins électro-mécaniques

Cahier des charges
Cahier des charges SKF pour vérins électro-mécaniques(à retourner à votre contact SKF local)De : . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A l'attention de : . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
g • Si le client a besoin d'un temps de cycle court (~<6s) ou a complètement déterminé son cycle de positionnement, remplir la page 2. • Remplir la page 3 si le client a besoin d'un moteur et de son variateur positionneur.
Nom de la société:Contact client pour questions techniques
Application:
Effort à fournir estimé: (expliquer ce que cet effort estimé inclut: poids du système mécanique entrainé par le vérin, frottements, force d'inertie pen-dant les accélérations, autres charges…):
Course du vérin estimée:
Vitesse maximum du vérin ou temps de cycle estimé (pour un aller et retour):
Nombre de cycles par heure, par jour, par mois et par année:
Evaluation du poids du système mécani-que entraîné par le vérin:
Durée de vie attendue:
Environnement spécifi que (présence de fl uides ou de gaz, température ambiante élevée ou basse, présence de polluants)
Ce devis doit être établi pour combien de vérins: Date de remise d'offre acceptable par le client:
Délai de livraison demandé par le client pour le premier lot:
Marché potentiel pour le même type de vérin:
Schéma de l'installation (penser à indiquer si c'est un vérin vertical et où sont positionnées les masses déplacées par le vérin):
n° tél email
n
n
n
n
n
n
n
n
n
n
n
n
n
n
Page 1/3

Cahier des charges
g Dans le cas d'un cycle de position complètement déterminé ou d'un temps de cycle court (~<6s), remplir ces deux graphes en essayant de garder la relation entre les axes "Temps" des deux graphes:
Effort
Temps
Cahier des charges SKF pour vérins électro-mécaniques
Page 2/3
* Penser à indiquer les unités d’effort, de temps et de position.* Penser à dessiner deux aller-retours du vérin pour montrer un éventuel temps d’attente entre deux cycles.* Penser à indiquer les mouvements où le vérin pousse (compression) et ceux où il tire (traction).
Position
Temps

Cahier des charges
Description de l'environnement
Y a-t-ilun automate/PLC qui gère
plusieurs axes (en plus de gérerle(s) vérin(s) SKF)
Donner la référence exacte de l'automate/PLC pour mieux comprendre les besoins du client:
Type de réseau (nombre de phase, tension, AC ou DC, fréquence, c-à-d 3 x 400 V AC 50 Hz)
Décrire les relations qui existent entrele vérin SKF et les autres axes:
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Puis:
Décrire quelles tâches le client veut réaliser avec le vérin SKF et comment il veut lancer ou arrêter ces tâches:
NonOui
Quel type de bus de terrain l'automate utilise pour communiquer avec les contrôleurs d'axes ?
CanOpen Profibus Sercos RS232 Autre : Précisez le nom: Pas de bus de terrain déterminé pour l'instant Pas de bus de terrain car les contrôleurs d'axes sont directement intégrés dans l'automate Donner la référence exacte de la carte contrôleur d'axe ainsi que la nature du feedback (TTL, SSI/ROD…):
?
Les axessont-ils
indépendants OuiNon
?
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Cahier des charges SKF pour vérins électro-mécaniques
Page 3/3

Cahier des charges
g
Notes


SKF est la marque déposée de SKF.
© Groupe SKF 2005-2008Reproduction, même partielle, interdite sans autorisation. Les erreurs ou omissions qui auraient pu se glisser dans cette publication, malgré le soin apporté à sa réalisation, n’engagent pas la responsabilité de SKF, pour tout dommage ou préjudice occasionné, directement ou indirectement, par l’utilisation des informations qu’elle contient.
Publication 5338 FR - 2008-01 Imprimée en France sur papier recyclé
ActuationBall & Roller screws
Represented by:





























