Embed Size (px)
Citation preview
PLF Physique & Vibrations - TP n°2 – p
1
Questionnaire de préparation du TP n°2 - SYSTÈME MÉCANIQUE à 1 ou 2 DEGRÉS DE LIBERTÉ
(à rendre en version manuscrite sur une feuille double - développer les réponses, sans dépasser les 4 pages )
(NB : citer les sources - soigner la présentation)
Chaque étudiant remettra son travail de préparation au début de la séance et indiquera les questions restées en suspens. A indiquer sur la feuille : Classe: Groupe : Nom : Date :
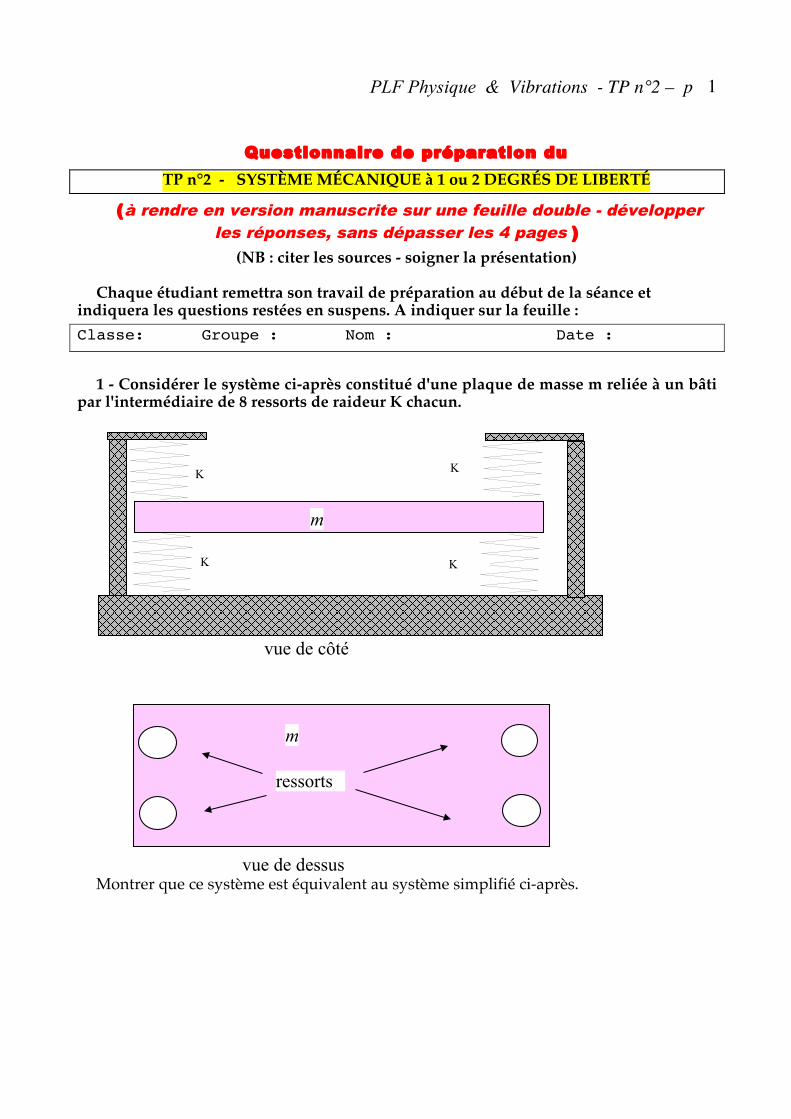
1 - Considérer le système ci-après constitué d'une plaque de masse m reliée à un bâti
par l'intermédiaire de 8 ressorts de raideur K chacun.
Montrer que ce système est équivalent au système simplifié ci-après.
vue de côté
vue de dessus
ressorts
m
K K
K K
m
PLF Physique & Vibrations - TP n°2 – p
2
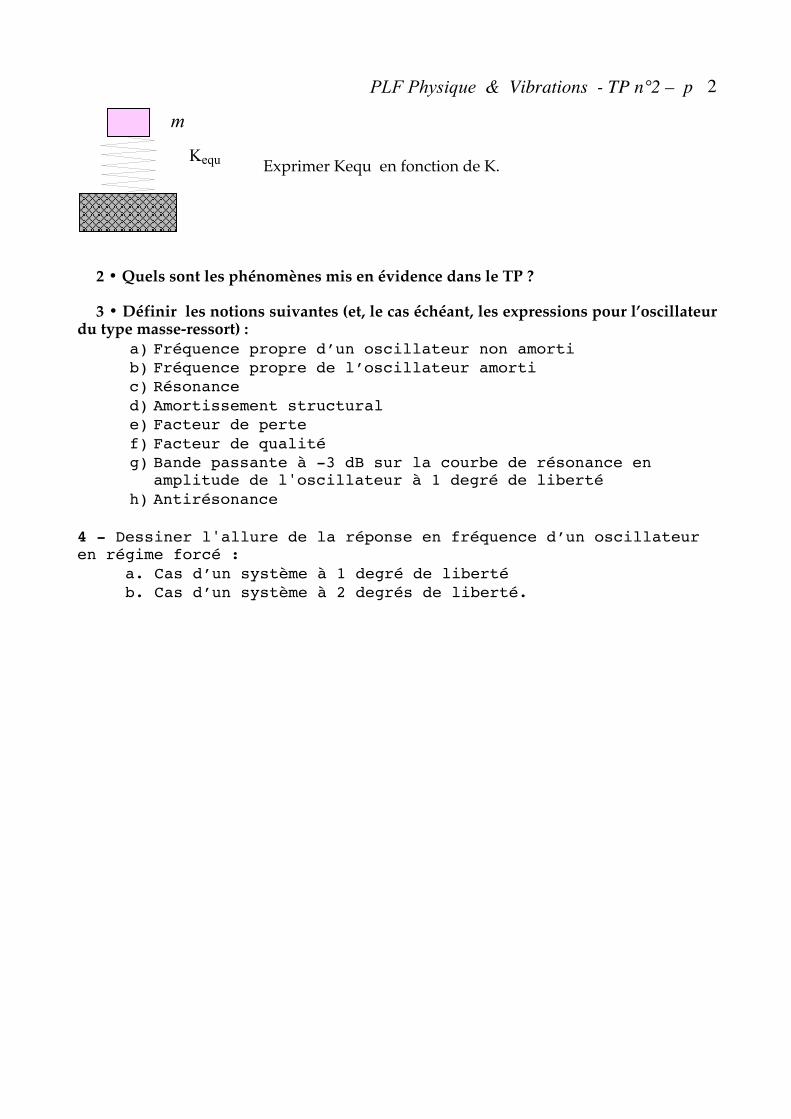
Exprimer Kequ en fonction de K.
2 • Quels sont les phénomènes mis en évidence dans le TP ? 3 • Définir les notions suivantes (et, le cas échéant, les expressions pour l’oscillateur
du type masse-ressort) : a) Fréquence propre d’un oscillateur non amorti b) Fréquence propre de l’oscillateur amorti c) Résonance d) Amortissement structural e) Facteur de perte f) Facteur de qualité g) Bande passante à -3 dB sur la courbe de résonance en
amplitude de l'oscillateur à 1 degré de liberté h) Antirésonance
4 - Dessiner l'allure de la réponse en fréquence d’un oscillateur en régime forcé :
a. Cas d’un système à 1 degré de liberté b. Cas d’un système à 2 degrés de liberté.
Kequ
m

PLF Physique & Vibrations - TP n°2 – p
3
TP n°2 - SYSTÈME à 1 ou 2 DEGRÉS DE LIBERTÉ -
SUSPENSION ANTI-VIBRATILE Remarque : A la fin de la séance rendre un compte-rendu pour le groupe.
1. Introduction & but du TP Les vibrations mécaniques peuvent causer des dégâts importants, aussi bien dans les
machines que dans leur environnement (fissurations de fatigue - mauvais états de surfaces usinées - fonctionnement perturbé des machines de contrôle ou de pointage - inconfort des personnes - rayonnement de bruit ).
Si l’on ne peut atténuer les vibrations à la source, on essaye de s’opposer à leur transmission ou au moins de les atténuer par des suspensions convenables. Il s’agit :
- soit de protéger les personnes ou un appareillage délicat des vibrations de l’environnement ;
- soit de protéger l’environnement contre les forces dynamiques créées dans une machine.
Le TP permet d’étudier les vibrations libres et forcées d’un système à un ou deux
degrés de liberté. On met en évidence les phénomènes importants de résonance et d’antirésonance, ainsi que les relations entre décroissance des oscillations libres et bande passante des oscillations forcées. On introduit enfin la notion d’amortissement structural.
2. Description du matériel utilisé
Dispositif expérimental du système à 1 degré de liberté Le montage expérimental comprend les éléments ci-après. • Une chaîne d’excitation. qui comporte : - le générateur de signaux (HM 8030) d’amplitude et de fréquence réglables, - l’ampli de puissance (BK2706) permettant d’alimenter - le pot vibrant (BK4809) actionnant la table au moyen d’un électro-aimant.
PLF Physique & Vibrations - TP n°2 – p
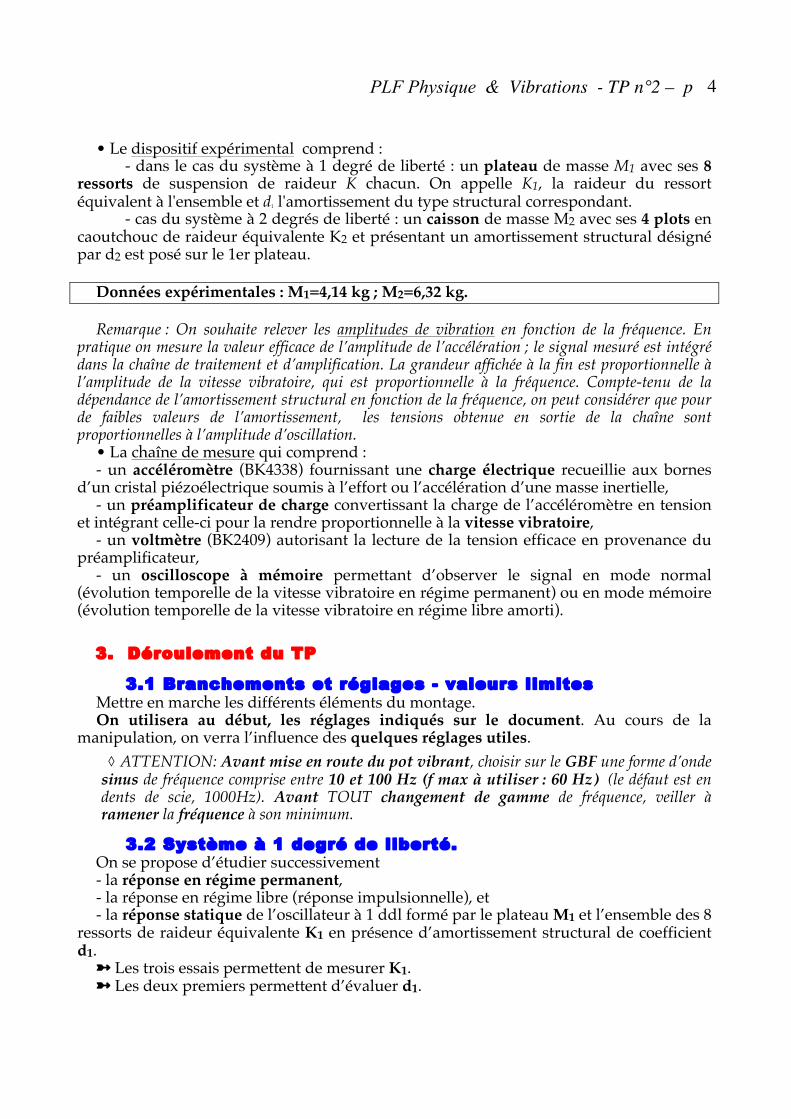
4 • Le dispositif expérimental comprend : - dans le cas du système à 1 degré de liberté : un plateau de masse M1 avec ses 8
ressorts de suspension de raideur K chacun. On appelle K1, la raideur du ressort équivalent à l'ensemble et d1 l'amortissement du type structural correspondant.
- cas du système à 2 degrés de liberté : un caisson de masse M2 avec ses 4 plots en caoutchouc de raideur équivalente K2 et présentant un amortissement structural désigné par d2 est posé sur le 1er plateau.
Données expérimentales : M1=4,14 kg ; M2=6,32 kg. Remarque : On souhaite relever les amplitudes de vibration en fonction de la fréquence. En
pratique on mesure la valeur efficace de l’amplitude de l’accélération ; le signal mesuré est intégré dans la chaîne de traitement et d’amplification. La grandeur affichée à la fin est proportionnelle à l’amplitude de la vitesse vibratoire, qui est proportionnelle à la fréquence. Compte-tenu de la dépendance de l’amortissement structural en fonction de la fréquence, on peut considérer que pour de faibles valeurs de l’amortissement, les tensions obtenue en sortie de la chaîne sont proportionnelles à l’amplitude d’oscillation.
• La chaîne de mesure qui comprend : - un accéléromètre (BK4338) fournissant une charge électrique recueillie aux bornes
d’un cristal piézoélectrique soumis à l’effort ou l’accélération d’une masse inertielle, - un préamplificateur de charge convertissant la charge de l’accéléromètre en tension
et intégrant celle-ci pour la rendre proportionnelle à la vitesse vibratoire, - un voltmètre (BK2409) autorisant la lecture de la tension efficace en provenance du
préamplificateur, - un oscilloscope à mémoire permettant d’observer le signal en mode normal
(évolution temporelle de la vitesse vibratoire en régime permanent) ou en mode mémoire (évolution temporelle de la vitesse vibratoire en régime libre amorti).
3. Déroulement du TP
3.1 Branchements et réglages - valeurs limites Mettre en marche les différents éléments du montage. On utilisera au début, les réglages indiqués sur le document. Au cours de la
manipulation, on verra l’influence des quelques réglages utiles. ◊ ATTENTION: Avant mise en route du pot vibrant, choisir sur le GBF une forme d’onde
sinus de fréquence comprise entre 10 et 100 Hz (f max à utiliser : 60 Hz) (le défaut est en dents de scie, 1000Hz). Avant TOUT changement de gamme de fréquence, veiller à ramener la fréquence à son minimum.
3.2 Système à 1 degré de liberté. On se propose d’étudier successivement - la réponse en régime permanent, - la réponse en régime libre (réponse impulsionnelle), et - la réponse statique de l’oscillateur à 1 ddl formé par le plateau M1 et l’ensemble des 8
ressorts de raideur équivalente K1 en présence d’amortissement structural de coefficient d1.
➼ Les trois essais permettent de mesurer K1. ➼ Les deux premiers permettent d’évaluer d1.
PLF Physique & Vibrations - TP n°2 – p
5 Il conviendra de comparer ces divers résultats et d’interpréter les “anomalies” mises en
évidence.
3.2.1 régime permanent L’accéléromètre étant placé au centre du plateau M1 on se propose d’étudier la
variation de l’amplitude X1 d'oscillation de la masse M1 lorsque la fréquence excitatrice varie de 10 Hz à 60 Hz maxi, la valeur de crête de la tension excitatrice restant constante. ◊ Commencer par la détermination du maximum en évitant la saturation (on le
remarque au bruit produit et on le voit sur l'oscilloscope), ◊ Noter les valeurs de f0 et Xmax. ◊ Déterminer les valeurs à -3 dB; ◊ Relever enfin quelques valeurs intermédiaires. ◊ Tracer la courbe Veff(f)
Toute l’exploitation se faisant en valeurs relatives, on portera en ordonnée Veff qui est proportionnel à ωX1 ; convertir toutes les pulsations remarquables en fréquences et graduer les abscisses en Hz pour pouvoir les afficher. On soignera la détermination des coordonnées de V1.max et f0 . On obtient un graphe analogue à celui de la figure A3. Le graphe peut présenter des “anomalies” sous la forme de pics secondaires dus aux résonances en rotation du plateau.
➼ Opérer avec précision et rapidité (3 points par pic). Indiquer une fourchette
d’incertitude pour les mesures. ➼ Utiliser les relations rappelées dans l'annexe pour déterminer K1(P) et d1(P). ➼ Vérifier a posteriori l'approximation ω0 ≈ ω (à amplitude max imale) . ◊ Q1: donner les valeurs de K1(P) et d1(P) obtenues par l'étude du régime permanent (avec
les incertitudes de mesure)
3.2.2 Régime libre Le régime d'oscillation libre est obtenu par une brève excitation mécanique. La réponse
obtenue est aussi appelée réponse impulsionnelle. Opérer comme suit : ➼ couper le générateur et l’ampli de puissance, ➼ mettre l’oscilloscope en mode mémoire avec une durée de balayage à 50 ms/div ➼ exciter le plateau en frappant le plateau du tranchant de la main, (un coup rapide,
pas trop fort, bien centré et bien vertical) : on doit obtenir un graphe analogue à celui de la figure A2. Eventuellement demander de l’aide.
➼ Utiliser le graphe pour déterminer la période Tp et le coefficient de décroissance de l'amplitude d'oscillation β . Calculer ωP. En déduire les valeurs de ω0 et ε.
En déduire une seconde série de valeurs pour K et d notées K1(i) et d1(i).
◊ Q2: Exprimer les valeurs de ω p , β , ω0i , K1(i) , d1(i) obtenues à partir des relations de l'annexe..
PLF Physique & Vibrations - TP n°2 – p
6
3.2.3 réponse statique ➼ démonter l’un des 8 ressorts, et déterminer sa raideur statique k1s sur la petite
presse munie de son comparateur (attention à la confusion charge-masse) ➼ En déduire la raideur équivalente K1(stat) en supposant que les 8 ressorts sont
identiques et que la précontrainte n’intervient que très peu. ◊ Q3: la valeur de K1(stat).
3.2.4 discussion Pour chaque détermination de K1 et d1, donner un intervalle de confiance avec
justification. Au cas où les diverses déterminations ne se recoupaient pas, rechercher les sources probables de discordance.
4.3 système à 2 degrés de liberté : régime permanent,
réponse impulsionnelle, réponse statique.
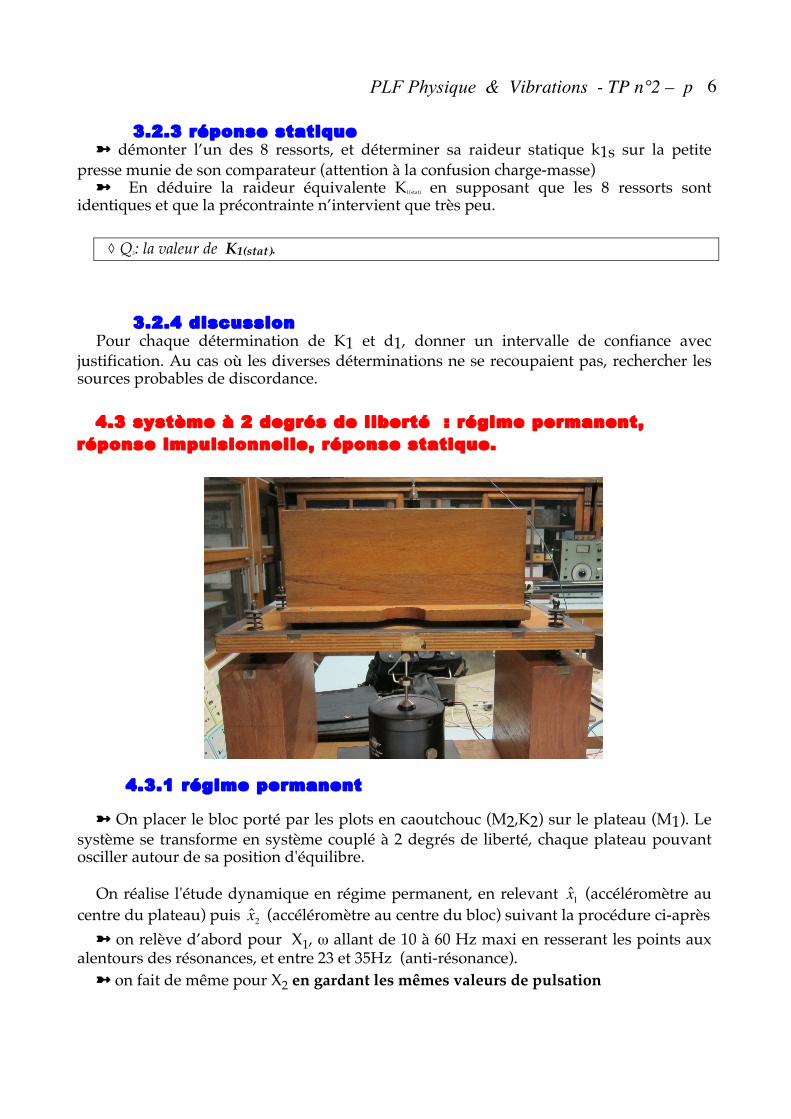
4.3.1 régime permanent ➼ On placer le bloc porté par les plots en caoutchouc (M2,K2) sur le plateau (M1). Le
système se transforme en système couplé à 2 degrés de liberté, chaque plateau pouvant osciller autour de sa position d'équilibre.
On réalise l'étude dynamique en régime permanent, en relevant x̂1 (accéléromètre au
centre du plateau) puis x̂2 (accéléromètre au centre du bloc) suivant la procédure ci-après ➼ on relève d’abord pour X1, ω allant de 10 à 60 Hz maxi en resserant les points aux
alentours des résonances, et entre 23 et 35Hz (anti-résonance). ➼ on fait de même pour X2 en gardant les mêmes valeurs de pulsation
PLF Physique & Vibrations - TP n°2 – p
7 ➼ on porte les résultats sur un graphe qui doit avoir l’allure de la figure A5, (2
résonances, 1 antirésonance, 1 croisement)
➼ On en déduit le graphe de la transmission T = X2X1
à présenter à l’identique de la
figure A7 (on se contentera de porter les tensions en lieu et place des élongations) ◊ Attention à soigner particulièrement la détermination des coordonnées des maxima, ainsi
que du point d’intersection des graphes X1(ω) et X2 (ω) . ➼ Effectuer suffisamment de mesures pour une bonne détermination de Tmax. Le
point particulier de fréquence notée fT1 est important pour l'exploitation des mesures : c'est le point pour lequel les 2 amplitudes sont égales .
◊ Q4: Valeur de d2 (relation 16). Valeur de K2 obtenue à partir de la relation 15b en utilisant
la valeur particulière pour laquelle T = Tmax. ◊ Q5: indiquer dans quel domaine de fréquences la suspension est utile.
4.3.2 réponse impulsionnelle de l’oscillateur (M2,K2) seul La réponse impulsionnelle du système couplé est inexploitable au moyen d’un
oscilloscope à mémoire ; une analyse par Transformée de Fourier rapide (traitée dans les TP 4 et 5) est nécessaire, ce que ne permet pas l’appareil utilisé ici.
➼ placer le bloc (M2,K2) sur la table et enregistrer sa réponse impulsionnelle comme au paragraphe 4.2.2 ; en déduire une autre série de valeurs K2i et d2i.
4.3.3 étude statique de K2 ➼ sur un plot identique à ceux qui supportent M2, essayer de déterminer la raideur
K2s. ◊ Par rapport à l’essai sur ressort, de nouvelles difficultés surgissent : déformation non-
linéaire et non-instantanée se traduisant par une grande différence entre K2 statique et K2 dynamique. ➼ comparer la valeur de K2 obtenue en dynamique (K2.dyn) et celle obtenue en statique
(K2.stat) ; en tirer une conclusion importante pour le choix de plots antivibratils. ◊ Attention : Couper l’alimentation des appareils avant de quitter le poste de TP, et remettre
en place tout ce qui a été utilisé.
5. Synthèse & compte-rendu ➼ prendre les meilleures déterminations dynamiques de K1 et K2, et, à partir de la
relation 12.b, retrouver les pulsations de résonance ωres.1 et ωres.2 et les fréquences correspondantes fres.1 et fres.2 du système couplé (on négligera d1 et d2 dans ce calcul).
On vérifie que le couplage augmente l’écart entre fréquences propres.
PLF Physique & Vibrations - TP n°2 – p
8 ➼ sur le graphe X1(ω) concernant le système couplé, observer la zone d’antirésonance
et comparer à la pulsation de résonance ωres ≈ ω02 = K2
M2
du système M2K2.
Ce comportement est utilisé dans les atténuateurs dynamiques. ➼ comparer réponse impulsionnelle et réponse en régime permanent pour la
détermination des raideurs et facteurs de perte eu égard à la rapidité, précision, mise en œuvre, etc.
PLF Physique & Vibrations - TP n°2 – p
9
Annexe du TP n°2
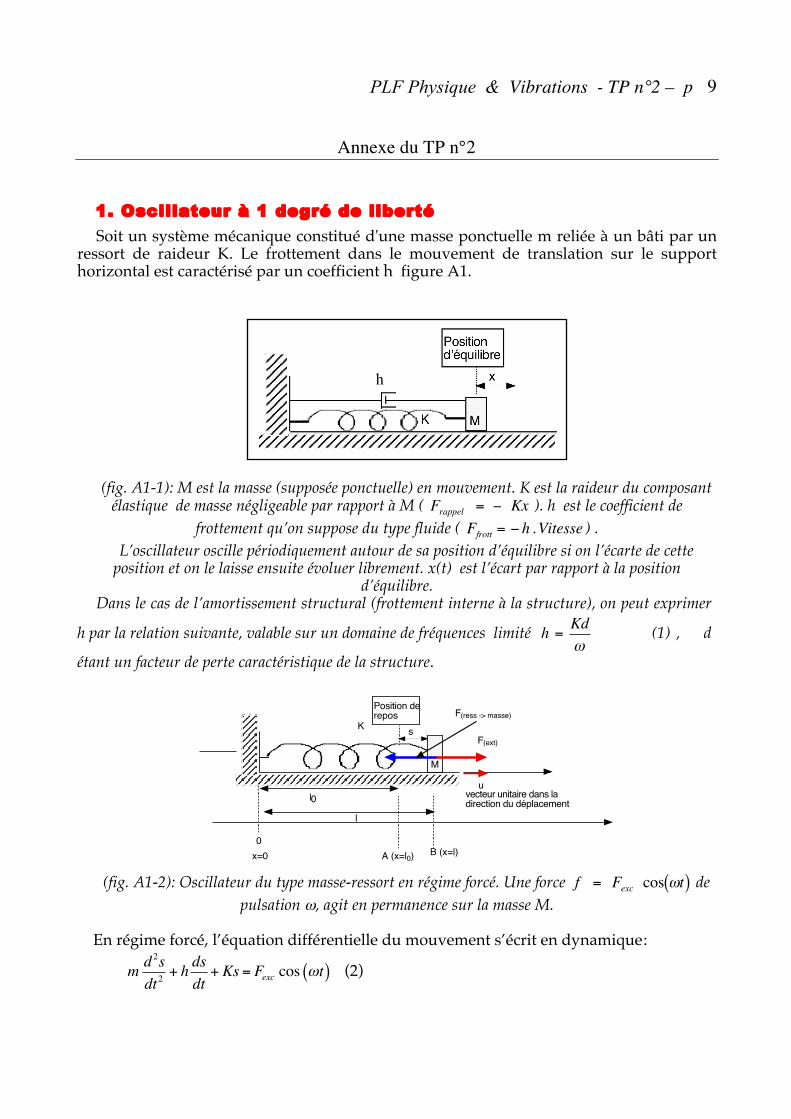
1. Oscillateur à 1 degré de liberté Soit un système mécanique constitué d'une masse ponctuelle m reliée à un bâti par un
ressort de raideur K. Le frottement dans le mouvement de translation sur le support horizontal est caractérisé par un coefficient h figure A1.
(fig. A1-1): M est la masse (supposée ponctuelle) en mouvement. K est la raideur du composant
élastique de masse négligeable par rapport à M (
€
Frappel = − Kx ). h est le coefficient de frottement qu’on suppose du type fluide ( Ffrott = − h . Vitesse ) .
L’oscillateur oscille périodiquement autour de sa position d’équilibre si on l’écarte de cette position et on le laisse ensuite évoluer librement. x(t) est l’écart par rapport à la position
d’équilibre. Dans le cas de l’amortissement structural (frottement interne à la structure), on peut exprimer
h par la relation suivante, valable sur un domaine de fréquences limité h = Kdω
(1) , d
étant un facteur de perte caractéristique de la structure.
(fig. A1-2): Oscillateur du type masse-ressort en régime forcé. Une force
€
f = Fexc cos ωt( ) de pulsation ω, agit en permanence sur la masse M.
En régime forcé, l’équation différentielle du mouvement s’écrit en dynamique :
m d2sdt2 + h ds
dt + Ks = Fexc cos ωt( ) (2)
h
K
M
Position de repos
sF(ext)
l0
l
uvecteur unitaire dans la direction du déplacement
0x=0 A (x=l0) B (x=l)
F(ress -> masse)

PLF Physique & Vibrations - TP n°2 – p
10 En l’absence d’amortissement (h=0), la masse M, après écart de la position d’équilibre
varie autour de cette position suivant l’expression :
€
s(t) = X0 cos ω 0t + ϕ0( ) X0 l’amplitude et ϕ0, la phase initiale dépendent des conditions initiales. Le mouvement
est caractérisé alors par une pulsation propre
€
ω0 = KM ou une fréquence propre
€
f0 = 12π
KM .
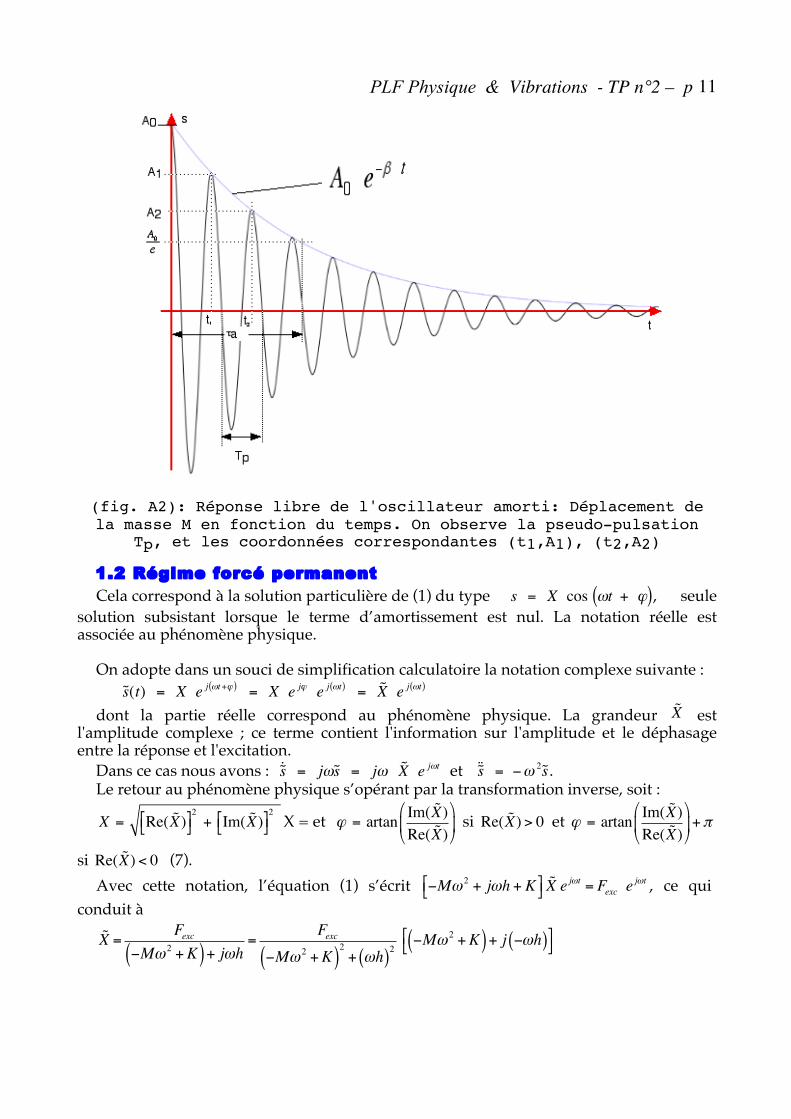
1.1 Oscillations libres amorties Dans tous les systèmes mécaniques il existe des frottements et donc des pertes
d’énergie en cas de mouvement d’oscillation. Pour trouver la solution générale de l’équation homogène associée à (2) on écrit l’équation caractéristique M r2 + hr + K = 0 ; on montre que la seule solution “intéressante” en terme de vibrations est obtenue pour un déterminant négatif (mouvement pseudo-périodique amorti), c’est-à-dire pour la solution en x :
s(t) = A0 exp −βt( ) cos ω pt +ϕ0( )"# $% (3)
X0 l’amplitude et ϕ0, la phase initiale dépendent des conditions initiales et des conditions aux limites.
β = h2M
est le coefficient d’amortissement qui caractérise la décroissance exponentielle
de l’amplitude dans le temps et ω p = ω02 − β 2 = K
M − h
2
4M 2 est la pseudo pulsation.
On définit également un coefficient d’amortissement critique hcrit = 2 MK qui fixe la limite entre le régime non oscillant (apériodique) et le régime d’oscillation, ainsi qu’un
coefficient réduit d’amortissement défini par l’expression ε = hhcrit
= βω0
. Ce coefficient est
lié au facteur de perte d par la relation : d = 2 ε = 2 βω0
(4) .
La pseudo pulsation s’écrit donc
€
ω p = ω02 − ε2ω0
2 = ω0 1 − ε2 et peut donc être confondue avec ω0 pour d < 0,2.
Expérimentalement, on relie ces grandeurs au mouvement de la masse M selon :
β = −1t2 − t1
ln A2
A1
"
#$
%
&'
(5). L’allure de la réponse est montrée sur la figure ci-après.
PLF Physique & Vibrations - TP n°2 – p
11
(fig. A2): Réponse libre de l'oscillateur amorti: Déplacement de la masse M en fonction du temps. On observe la pseudo-pulsation
Tp, et les coordonnées correspondantes (t1,A1), (t2,A2)
1.2 Régime forcé permanent Cela correspond à la solution particulière de (1) du type
€
s = X cos ωt + ϕ( ), seule solution subsistant lorsque le terme d’amortissement est nul. La notation réelle est associée au phénomène physique.
On adopte dans un souci de simplification calculatoire la notation complexe suivante :
€
˜ s (t) = X e j ωt +ϕ( ) = X e jϕ e j ωt( ) = ˜ X e j ωt( ) dont la partie réelle correspond au phénomène physique. La grandeur X est
l'amplitude complexe ; ce terme contient l'information sur l'amplitude et le déphasage entre la réponse et l'excitation.
Dans ce cas nous avons :
€
˜ ˙ s = jω˜ s = jω ˜ X e jωt et
€
˜ ˙ ̇ s = −ω 2˜ s . Le retour au phénomène physique s’opérant par la transformation inverse, soit :
X = Re( X)!" #$2 + Im( X)!" #$
2 X = et ϕ = artan Im( X)
Re( X)!
"#
$
%& si Re( X)> 0 et ϕ = artan Im( X)
Re( X)!
"#
$
%&+π
si Re( X)< 0 (7). Avec cette notation, l’équation (1) s’écrit −Mω 2 + jωh + K"# $% X e jωt = Fexc e
jωt , ce qui conduit à X = Fexc
−Mω 2 +K( )+ jωh = Fexc
−Mω 2 +K( )2+ ωh( )2
−Mω 2 +K( )+ j −ωh( )"#
$%

PLF Physique & Vibrations - TP n°2 – p
12
soit
X ω( ) = Fexc−Mω 2 +K( )
2+ h2ω 2
ou
€
X ω( ) =Fexc
m ω02 −ω 2( )
2+ 2βω( )2
et
ϕ ω( ) = arctan −ωh−mω 2 +K"
#$
%
&' ou
€
ϕ ω( ) = arctan −2βωω0
2 −ω 2
&
' (
)
* + . (8a)
En introduisant l’amortissement structural (h = Kdω
), il vient :
(a)
€
X = Fexc−Mω 2 +K( )2
+ Kd( )2 et (b)
€
ϕ = arctan −Kd−Mω 2 + K%
& '
(
) * (8b)
et l’on constate que pulsation de résonance et pulsation libre sont quasiment confondues pour un facteur de perte inférieur à 0,2. Dans ce cas, on montre que la bande passante à -3dB (∆ω-3dB = ω
2 - ω
1), le facteur de perte d, et le facteur de qualité Q (ou
d'amplification à la résonance ) sont liés par les relations suivantes.
- Pour d < 0,2 , on a
€
ωres ≈ ω0 = KM
€
Xmax ≈ X(ω0) = FexcKd
= X(ω = 0)d
soit d = 2ε =
€
Δω −3dB
ω0
= ω2 − ω1
ω0
;
€
Q ≈ 1d
. (9)
◊ Remarque : la condition d < 0,2 reste souvent à vérifier “a posteriori”
(fig. A3) Système MKK’F : Réponse en fréquence - Bande passande à -3dB
On considère dans la suite un système de 2 oscillateurs couplés, modélisé par 2 masses
et 2 raideurs, avec action sinusoïdale
€
f = Fexc cos ωt( ) sur M1 (figure A4).

PLF Physique & Vibrations - TP n°2 – p
13
(fig. A4) : Modèle 2MK à 2 degrés de liberté sans amortissement.
La mise en équation conduit au système suivant (en l’absence d’amortissement) :
€
M1d2x1
dt 2 = −K1x1 − K2 x1 − x2( ) + Fexc cos ωt( )
M2d2x2
dt 2 = − K2 x2 − x1( )
$
% & &
' & &
(10)
En considérant un régime forcé harmonique permanent, on arrive au système en
€
X1 et
€
X2 ci-après (notation complexe) :
€
K1 + K2 −M1ω2( )X1 − K2X2 = Fexc
−K2X1 + K2 −M2ω2( )X2 = 0
$ % &
' &
( ) &
* & (11)
que l’on résoud par la méthode de Cramer pour obtenir les solutions complexes :
€
X1 =
Fexc −K2
0 K2 −M2ω2
Δ et
€
X2 =
K1 + K2 −M12ω 2 Fexc
−K2 0Δ
(12.a)
avec
€
Δ = M1M2ω4 − M1K2 + M2 K1 + K2( )[ ]ω 2 + K1K2 (12.b)
Remarque : La solution physique est obtenue en prenant les valeurs absolues des
expressions ci-dessus. ◊ Remarque : ici,
€
X1 et
€
X2 sont réels ; il suffit donc de prendre les valeurs absolues pour retourner aux solutions physiques.
2.1 résonances Les résonances correspondent aux 2 racines ω1 et ω2 réelles et positives, annulant le
déterminant ∆, ce qui conduit à des déplacements “infinis” ; en pratique, il existe toujours un léger amortissement qui, s’il n’influence pas notablement la valeur des fréquences de résonance, limite fortement les valeurs maximales (figure A5).
M1K1K2 M2f
x1 x2
PLF Physique & Vibrations - TP n°2 – p
14
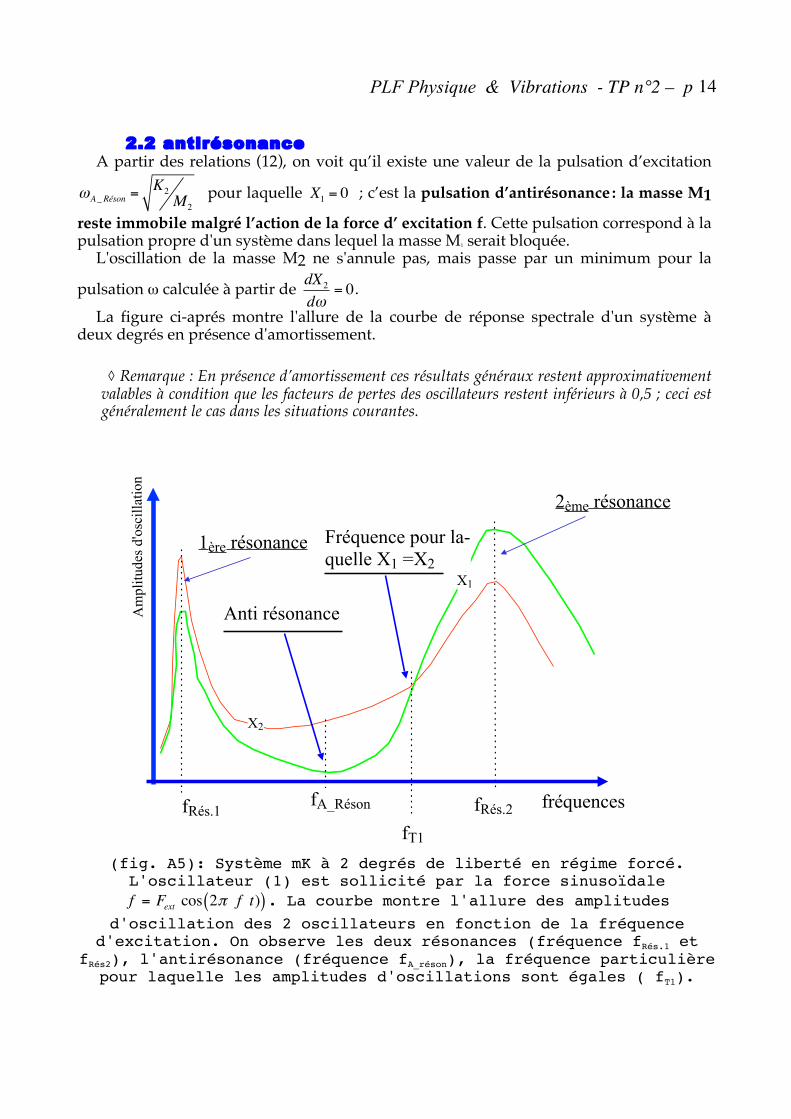
2.2 antirésonance A partir des relations (12), on voit qu’il existe une valeur de la pulsation d’excitation
ωA_Réson =K2
M2 pour laquelle
€
X1 = 0 ; c’est la pulsation d’antirésonance : la masse M1
reste immobile malgré l’action de la force d’ excitation f. Cette pulsation correspond à la pulsation propre d'un système dans lequel la masse M1 serait bloquée.
L'oscillation de la masse M2 ne s'annule pas, mais passe par un minimum pour la
pulsation ω calculée à partir de
€
dX2
dω= 0.
La figure ci-aprés montre l'allure de la courbe de réponse spectrale d'un système à deux degrés en présence d'amortissement.
◊ Remarque : En présence d’amortissement ces résultats généraux restent approximativement
valables à condition que les facteurs de pertes des oscillateurs restent inférieurs à 0,5 ; ceci est généralement le cas dans les situations courantes.
(fig. A5): Système mK à 2 degrés de liberté en régime forcé.
L'oscillateur (1) est sollicité par la force sinusoïdale f = Fext cos 2π f t)( ). La courbe montre l'allure des amplitudes
d'oscillation des 2 oscillateurs en fonction de la fréquence d'excitation. On observe les deux résonances (fréquence fRés.1 et
fRés2), l'antirésonance (fréquence fA_réson), la fréquence particulière pour laquelle les amplitudes d'oscillations sont égales ( fT1).
X2
X1
fA_RésonfRés.1 fRés.2
Am
plitu
des
d'os
cilla
tion
fréquences
fT1
1ère résonance
2ème résonance
Anti résonance
Fréquence pour la-quelle X1 =X2

PLF Physique & Vibrations - TP n°2 – p
15 3. Facteur de transmission Il est intéressant de considérer la transmission des vibrations de la masse M1 vers la
masse M2 dans la mesure où dans beaucoup de situations on cherche à atténuer cette transmission ; c'est le cas des amortisseurs. Cette transmission est caractérisée par le
rapport
€
T =X2
X1 . La figure A6 illustre la situation dans laquelle un mouvement est imposé
à la masse M1. Le mouvement est transmis à la masse M2 par l'intermédiaire d'un élément élastique de raideur K2, présentant un amortissement de coefficiet h2 . On étudie l’effet de l’amortissement sur la transmission.
(fig. A6): Modèle utilisé pour étudier la transmission des
mouvements de M1 à M2. L’équation de la dynamique appliquée à M2 donne
M2d 2x2
dt2 = − K2 x2 − x1( )− h2 dx2
dt−dx1
dt"
#$
%
&' (13)
On en déduit la transmission complexe
€
˜ T : T = X2X1
= K2 + jh2ωK2 −M2ω
2( )+ jh2ω (14)
dont le module est donné par T̂ = K2
2 + h2ω( )2
K2 −M2ω2( )
2+ h2ω( )2
. (15a)
Cas d'un amortissement structural. En présence d'un amortissement structural de coefficient d2 on peut introduire un
coefficient de frottement équivalent donné par h2.equiv =K2d2ω .
En introduisant ce coefficient dans la relation ci-dessus, on obtient :
T̂ = 1 + d22
1− M2
K2
ω 2"
#$
%
&'
2
+ d22
(15b).
Le coefficient T prend une valeur maximale pour la valeur de ω suivante :
M1 M2K2
h2Oscillation
d'amplitude X1
Oscillation d'amplitude X1
fexc

PLF Physique & Vibrations - TP n°2 – p
16
ωT .max = ω02 = K2
M2
Pour le cas limite d'un amortissement nul, la relation (15b) se simplifie en (notation
réduite)
T = 1
1 − ωω02
"
#$
%
&'
2 (15c)
avec ω0.2 =ωT .max = K2
M2 , pulsation propre de l'oscillateur M2 -K2.
La figure ci-après montre l'allure de la courbe de transmission en fonction de la fréquence d'excitation.
(fig. A7) : Allure de la courbe de transmission
On observe que: • le coefficient T devient inférieur à 1 pour ω > 2 ω02 ; on travaillera toujours dans
cette zone pour réduire la transmission des vibrations ;
• Tmax = T (ωT .max ) = 1+ d2
2
d22 ≈ 1d2
( 16) ; le facteur de perte limite la transmission des
vibrations ; • une valeur trop grande de d2 limite l’efficacité de la suspension (dans le domaine
ω > 2 ωT .max ).
pulsations
T
coef
ficie
nt d
e tra
nsm
issi
on
1
2
3