Réponse fréquentielle des systèmes
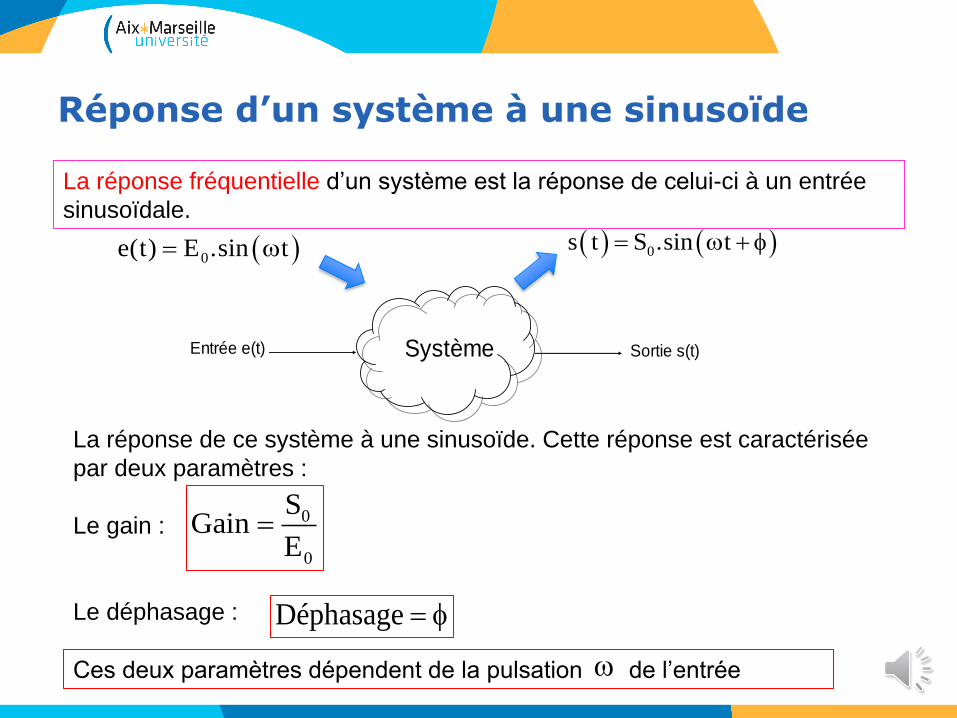
Réponse d’un système à une sinusoïde
SystèmeEntrée e(t) Sortie s(t)
La réponse de ce système à une sinusoïde. Cette réponse est caractérisée
par deux paramètres :
Le gain :
Le déphasage :
0
0
GainS
E
0e(t) E .sin t 0s t S .sin t
Déphasage
Ces deux paramètres dépendent de la pulsation de l’entrée
La réponse fréquentielle d’un système est la réponse de celui-ci à un entrée
sinusoïdale.

Réponse d’un système à une sinusoïde
0
0
ST( j )
E arg T j
Il existe trois types de représentations graphiques :
• BODE se représente sous la forme de deux courbes| ሻ𝑇(𝑗𝜔 | en fonction de 𝜔 (abscisses logarithmiques)
𝜙 = arg 𝑇 𝑗𝜔 en fonction de 𝜔 (abscisses logarithmiques)
• NYQUIST représente ሻ𝑇(𝑗𝜔 dans le plan complexe. La courbe est graduée en 𝜔.
• BLACK aussi appelé NICHOLS représente | ሻ𝑇(𝑗𝜔 | en fonction de 𝜙. La courbe est graduée en 𝜔.
On remplace la variable de Laplace p par j
Propriétés fréquentielles et Définitions
10-1
100
101
102
-80
-70
-60
-50
-40
-30
-20
-10
0
10Amplitude
rd/s
dBM
r
p
dBK
3dB
c
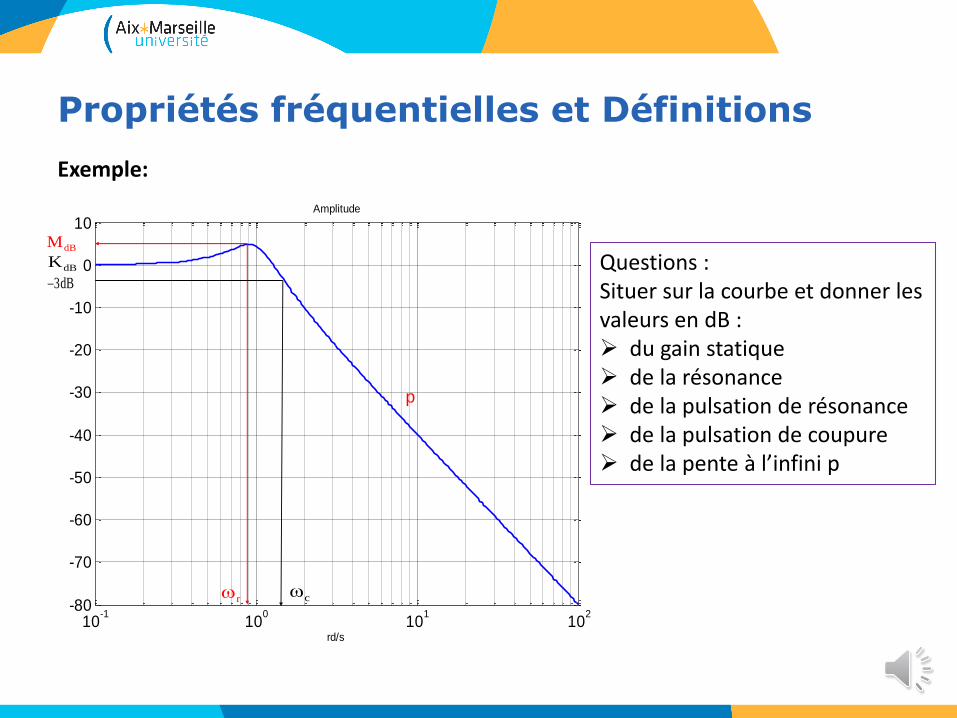
Exemple:
Questions :Situer sur la courbe et donner les valeurs en dB :➢ du gain statique ➢ de la résonance ➢ de la pulsation de résonance➢ de la pulsation de coupure➢ de la pente à l’infini p
Comment tracer le diagramme BODE
Méthode:En résumé, un lieu de Bode se trace à partir des étapes suivantes : - Exprimer la fonction de transfert en fonction de ω- Calculer le module de ሻ𝑇(𝑗𝜔 en fonction de ω, souvent en dB.- Calculer l’argument de arg 𝑇(𝑗𝜔ሻ en fonction de ω, en degré ou radian.- Tracer le diagramme de Bode asymptotique - Fournir un tracé plus précis.
Diagramme asymptotiquePour construire le diagramme de Bode de ces deux fonctions, on peut bien sûr réaliser un tracer point par point en faisant varier 𝜔 mais il n’est pas mauvais d’avoir au préalable une idée de l’allure des deux courbes. On trace alors ce qu’on appelle un diagramme asymptotique dans le plan de Bode.La plupart du temps, un diagramme asymptotique est suffisant pour obtenir une idée assez fine du comportement fréquentiel du système étudié.
Systèmes du premier ordre
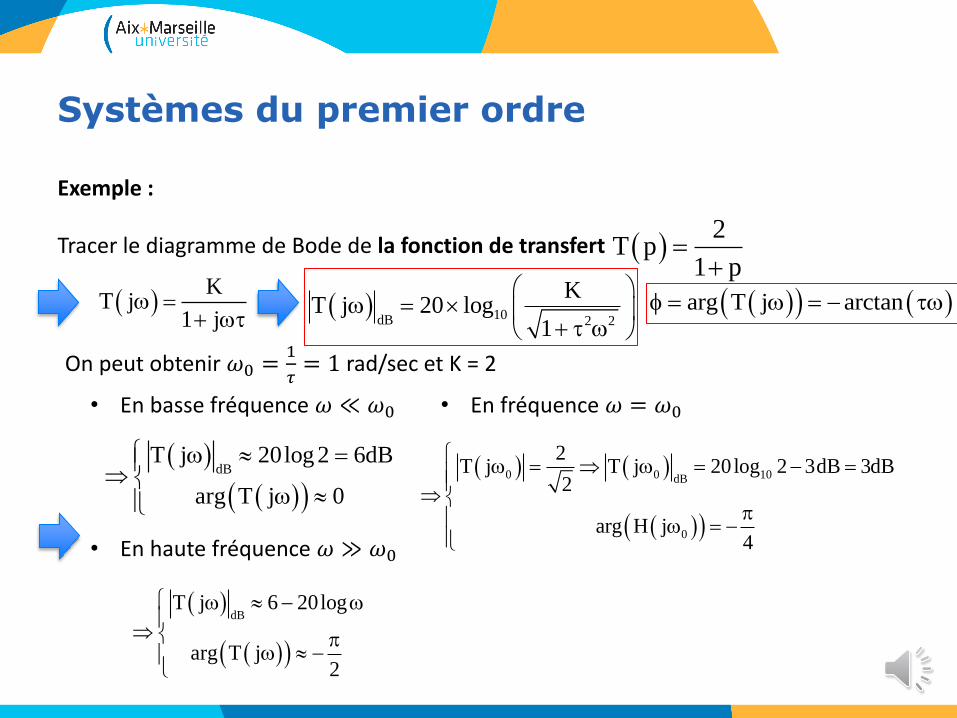
Exemple :
Tracer le diagramme de Bode de la fonction de transfert 2
T p1 p
On peut obtenir 𝜔0 =1
𝜏= 1 rad/sec et K = 2
• En basse fréquence 𝜔 ≪ 𝜔0
• En haute fréquence 𝜔 ≫ 𝜔0
dB
T j 20log 2 6dB
arg T j 0
dBT j 6 20log
arg T j2
0 0 10dB
0
2T j T j 20log 2 3dB 3dB
2
arg H j4
• En fréquence 𝜔 = 𝜔0
K
T j1 j
10dB 2 2
KT j 20 log
1
arg T j arctan
Systèmes du premier ordre
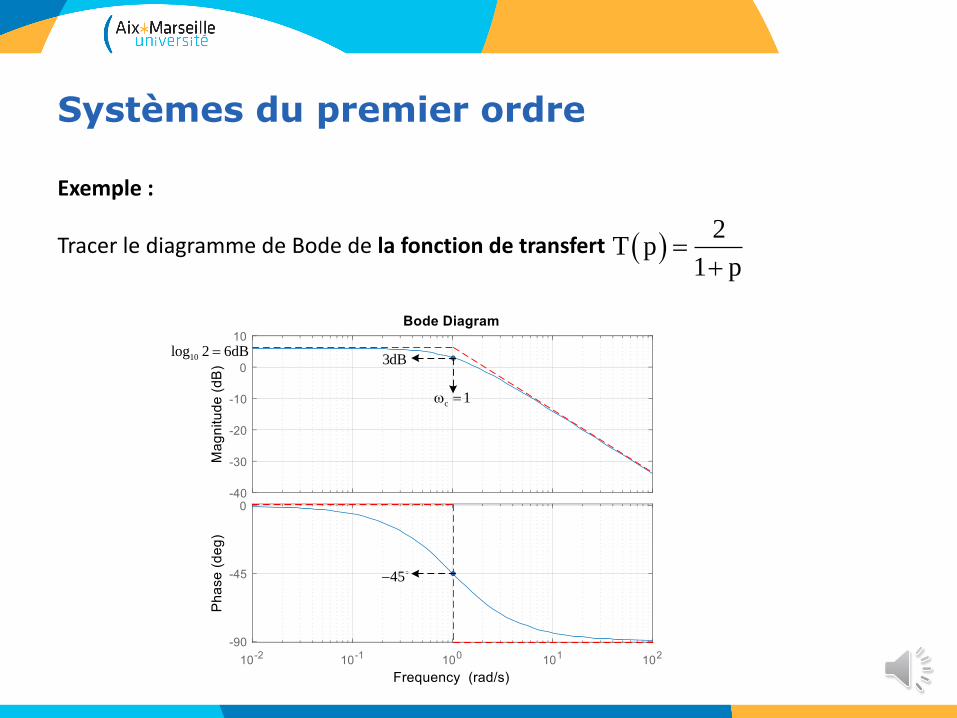
Exemple :
Tracer le diagramme de Bode de la fonction de transfert 2
T p1 p
c 1
10log 2 6dB3dB
45
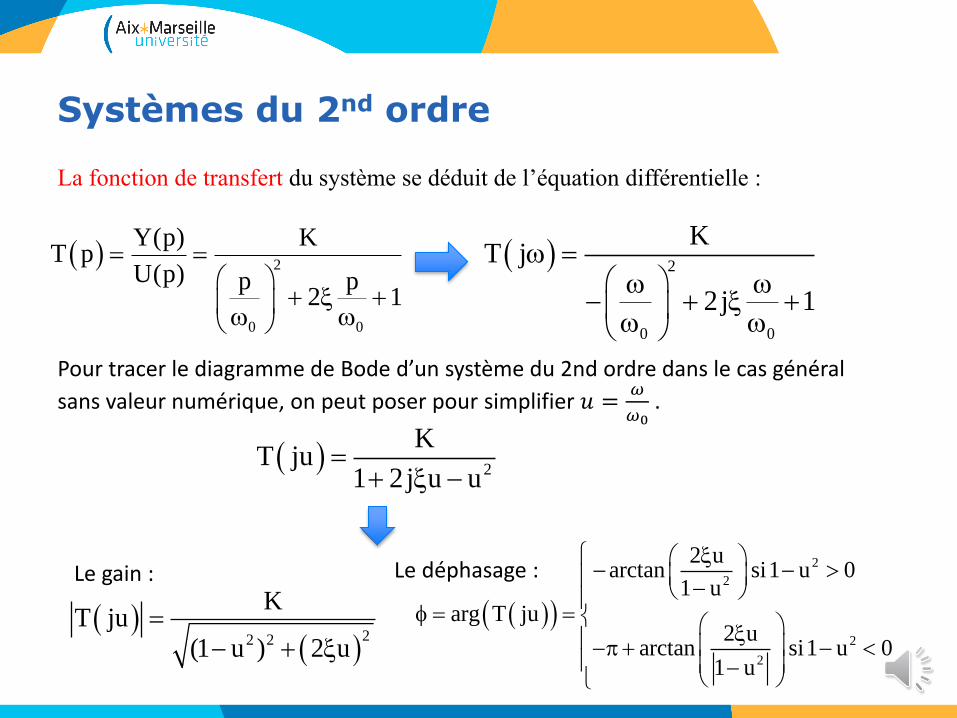
Systèmes du 2nd ordre
La fonction de transfert du système se déduit de l’équation différentielle :
2
0 0
KT j
2j 1
Pour tracer le diagramme de Bode d’un système du 2nd ordre dans le cas général
sans valeur numérique, on peut poser pour simplifier 𝑢 =𝜔
𝜔0.
2
KT ju
1 2j u u
22 2
KT ju
(1 u ) 2 u
2
2
2
2
2 uarctan si1 u 0
1 uarg T ju
2 uarctan si1 u 0
1 u
Le gain : Le déphasage :
2
0 0
Y(p) KT p
U(p) p p2 1
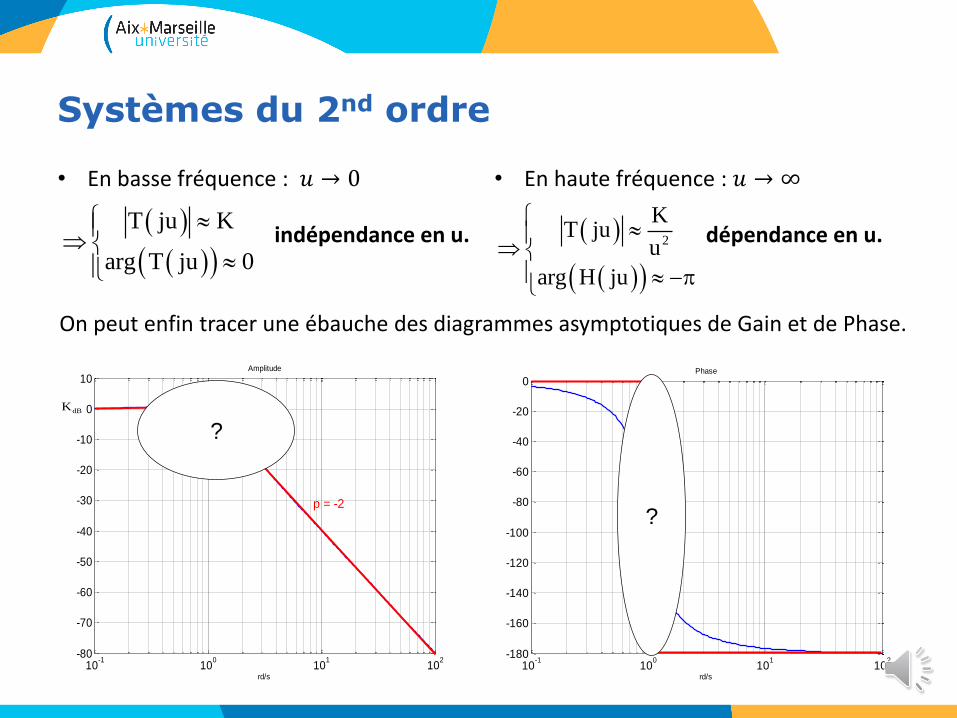
Systèmes du 2nd ordre
T ju K
arg T ju 0
indépendance en u.
• En basse fréquence : 𝑢 → 0 • En haute fréquence : 𝑢 → ∞
2
KT ju
u
arg H ju
dépendance en u.
On peut enfin tracer une ébauche des diagrammes asymptotiques de Gain et de Phase.
10-1
100
101
102
-80
-70
-60
-50
-40
-30
-20
-10
0
10Amplitude
rd/s
p = -2
dBK
?
10-1
100
101
102
-180
-160
-140
-120
-100
-80
-60
-40
-20
0Phase
rd/s
?
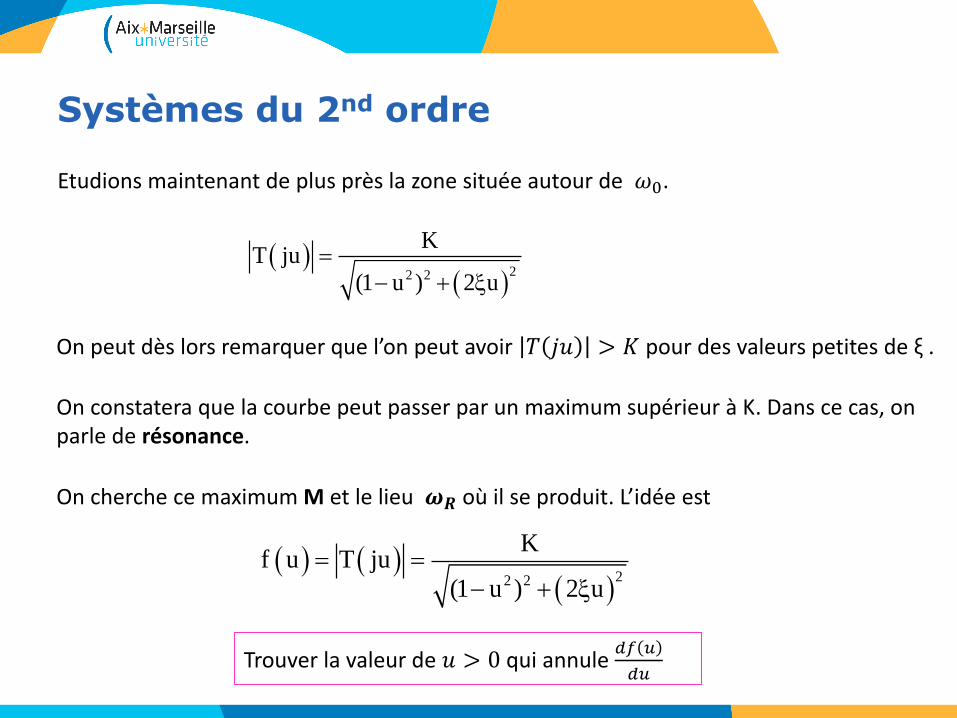
Systèmes du 2nd ordre
Etudions maintenant de plus près la zone située autour de 𝜔0.
22 2
KT ju
(1 u ) 2 u
On peut dès lors remarquer que l’on peut avoir 𝑇 𝑗𝑢 > 𝐾 pour des valeurs petites de ξ .
On constatera que la courbe peut passer par un maximum supérieur à K. Dans ce cas, on parle de résonance.
On cherche ce maximum M et le lieu 𝝎𝑹 où il se produit. L’idée est
22 2
Kf u T ju
(1 u ) 2 u
Trouver la valeur de 𝑢 > 0 qui annule 𝑑𝑓 𝑢
𝑑𝑢
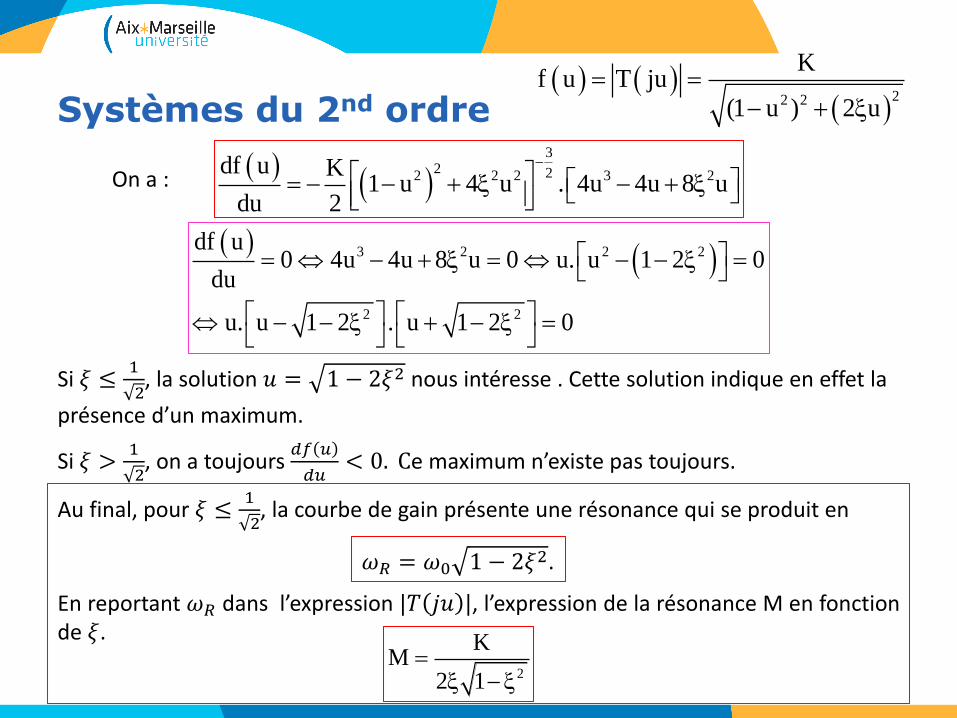
Systèmes du 2nd ordre
32 22 2 2 3 2
df u K1 u 4 u . 4u 4u 8 u
du 2
On a :
3 2 2 2
2 2
df u0 4u 4u 8 u 0 u. u 1 2 0
du
u. u 1 2 . u 1 2 0
Si 𝜉 ≤1
2, la solution 𝑢 = 1 − 2𝜉2 nous intéresse . Cette solution indique en effet la
présence d’un maximum.
Si 𝜉 >1
2, on a toujours
𝑑𝑓 𝑢
𝑑𝑢< 0. Ce maximum n’existe pas toujours.
Au final, pour 𝜉 ≤1
2, la courbe de gain présente une résonance qui se produit en
En reportant 𝜔𝑅 dans l’expression |𝑇 𝑗𝑢 |, l’expression de la résonance M en fonctionde 𝜉.
2
KM
2 1
𝜔𝑅 = 𝜔0 1 − 2𝜉2.
22 2
Kf u T ju
(1 u ) 2 u
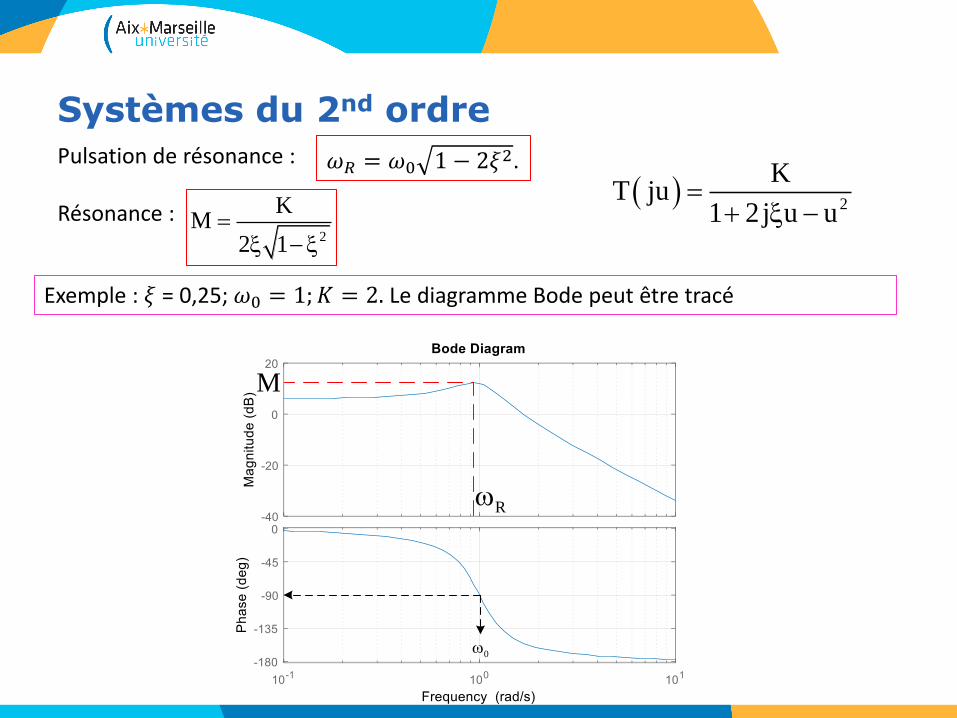
Systèmes du 2nd ordrePulsation de résonance :
Résonance :2
KM
2 1
𝜔𝑅 = 𝜔0 1 − 2𝜉2.
Exemple : 𝜉 = 0,25; 𝜔0 = 1;𝐾 = 2. Le diagramme Bode peut être tracé
R
M
0
2
KT ju
1 2j u u

Représentation de Nyquist
Soit un système de fonction de transfert 𝑇 𝑝 .
Le diagramme de Nyquist est la représentation la plus immédiate de la fonction complexe réponse
On reporte dans le plan la partie réelle selon l'axe horizontal et la partie imaginaire selon l'axe vertical.
T j Re j.Im
𝑇 𝑗ω𝑇 𝑝

Nyquist des systèmes du 1er ordre
Y(p) K
T pU(p) 1 p
K
T j1 j
Donnez les expressions littérales de Re 𝜔 et Im 𝜔
2 2
KRe
1
2 2
KIm
1
• En basse fréquence : 𝜔 ≪ 𝜔0
• En haute fréquence : 𝜔 ≫ 𝜔0 ;
• En 𝜔 = 𝜔0, ;
Re 𝜔 → 𝐾 Im 𝜔 → 0−
Re 𝜔 → 0+ Im 𝜔 → 0−
Re 𝜔 =𝐾
2Im 𝜔 = −
𝐾
2
La pulsation brisure 𝜔0 =1
𝜏

Nyquist des systèmes du 1er ordre
2 2
KRe
1
2 2
KIm
1
On peut montrer que le diagramme de Nyquist est un demi-cercle de centre 𝐾
2; 0
et de rayon 𝐾
2. On le parcourt dans le sens des 𝜔 croissants c'est-à-dire depuis
𝐾; 0 vers 0; 0 .
-1 0 1 2 3 4 5-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5Nyquist Diagram
Real Axis
Imagin
ary
Axis
K
2
0
Exemple : K=5; τ=1.
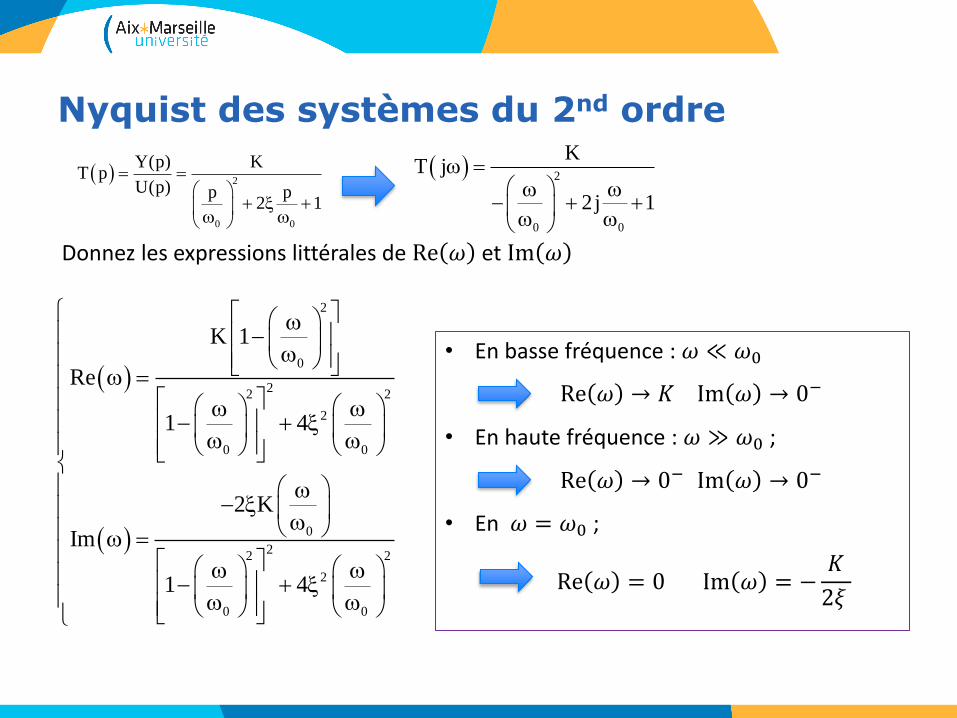
Nyquist des systèmes du 2nd ordre
Donnez les expressions littérales de Re 𝜔 et Im 𝜔
• En basse fréquence : 𝜔 ≪ 𝜔0
• En haute fréquence : 𝜔 ≫ 𝜔0 ;
• En 𝜔 = 𝜔0 ;
Re 𝜔 → 𝐾 Im 𝜔 → 0−
Re 𝜔 → 0− Im 𝜔 → 0−
Re 𝜔 = 0 Im 𝜔 = −𝐾
2𝜉
2
0 0
KT j
2j 1
2
0
22 2
2
0 0
0
22 2
2
0 0
K 1
Re
1 4
2 K
Im
1 4
2
0 0
Y(p) KT p
U(p) p p2 1
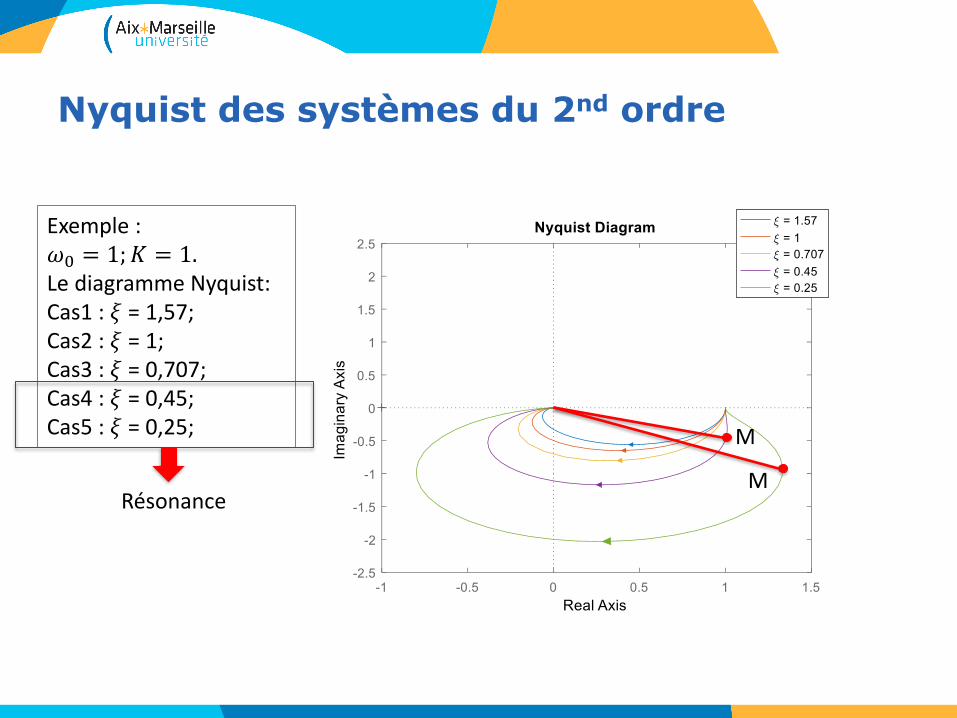
Nyquist des systèmes du 2nd ordre
Exemple :𝜔0 = 1;𝐾 = 1.Le diagramme Nyquist:Cas1 : 𝜉 = 1,57;Cas2 : 𝜉 = 1;Cas3 : 𝜉 = 0,707;Cas4 : 𝜉 = 0,45;Cas5 : 𝜉 = 0,25;
RésonanceM
M
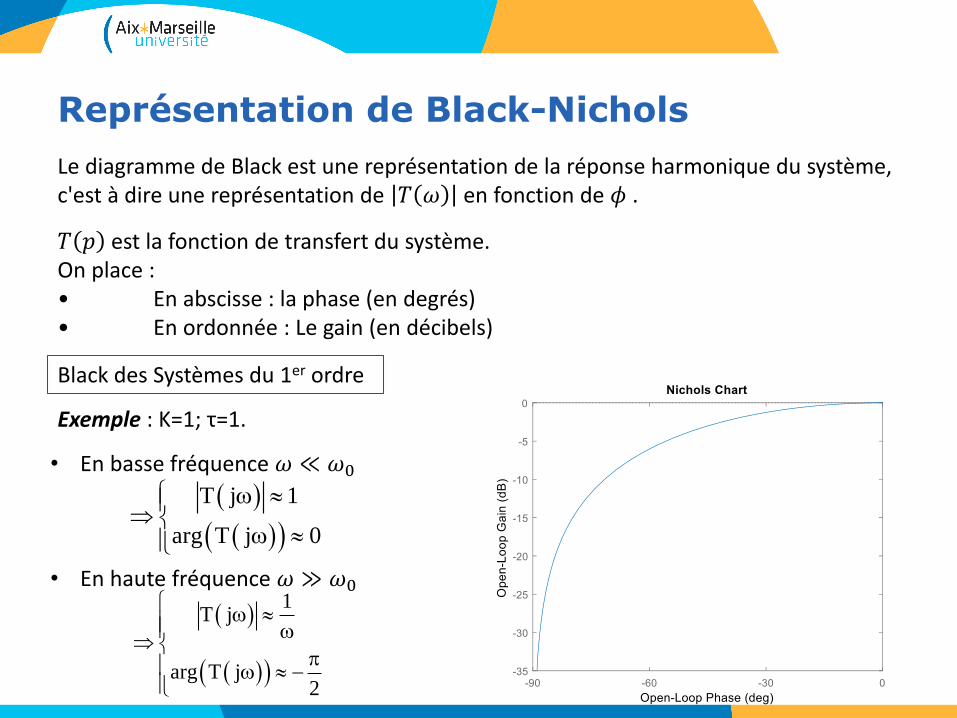
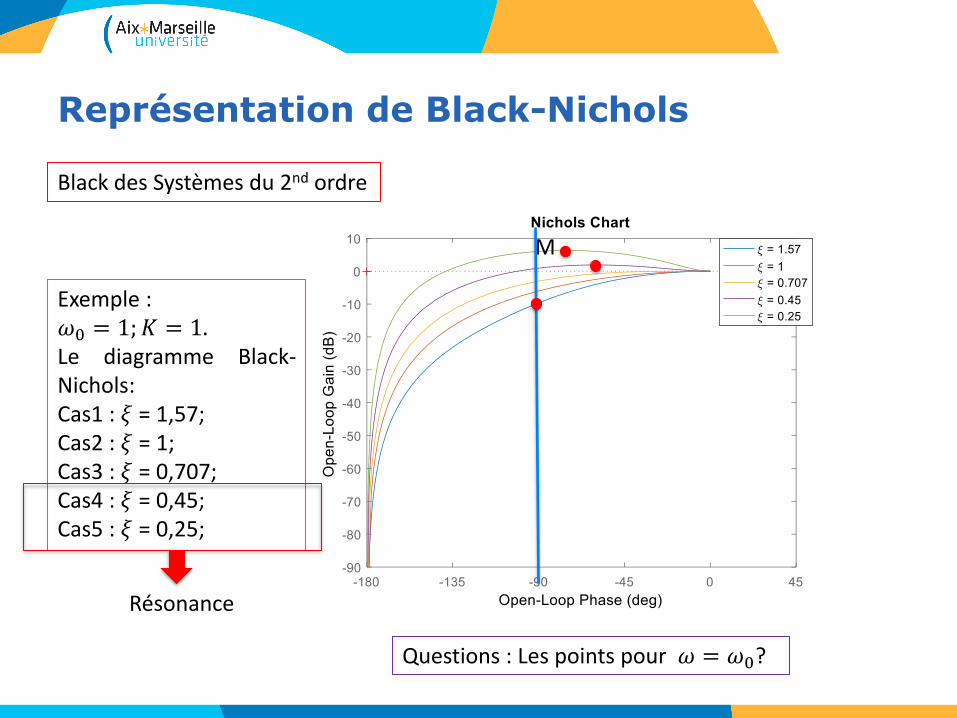
Représentation de Black-Nichols
Le diagramme de Black est une représentation de la réponse harmonique du système, c'est à dire une représentation de 𝑇 𝜔 en fonction de 𝜙 .
𝑇 𝑝 est la fonction de transfert du système.On place :• En abscisse : la phase (en degrés)• En ordonnée : Le gain (en décibels)
Exemple : K=1; τ=1.
Black des Systèmes du 1er ordre
• En basse fréquence 𝜔 ≪ 𝜔0
• En haute fréquence 𝜔 ≫ 𝜔0
T j 1
arg T j 0
1T j
arg T j2
Représentation de Black-Nichols
Exemple :𝜔0 = 1;𝐾 = 1.Le diagramme Black-Nichols:Cas1 : 𝜉 = 1,57;Cas2 : 𝜉 = 1;Cas3 : 𝜉 = 0,707;Cas4 : 𝜉 = 0,45;Cas5 : 𝜉 = 0,25;
Black des Systèmes du 2nd ordre
Résonance
M
Questions : Les points pour 𝜔 = 𝜔0?
Points importants
• Propriétés fréquentielles et Définitions
• Réponse fréquentielle des systèmes du 1er ordre (en Bode)
• Réponse fréquentielle des systèmes du 2nd ordre (en Bode)
• Réponse fréquentielle en Nyquist et Black
Révision Générale

1, Régulation en boucle ouverte et fermée
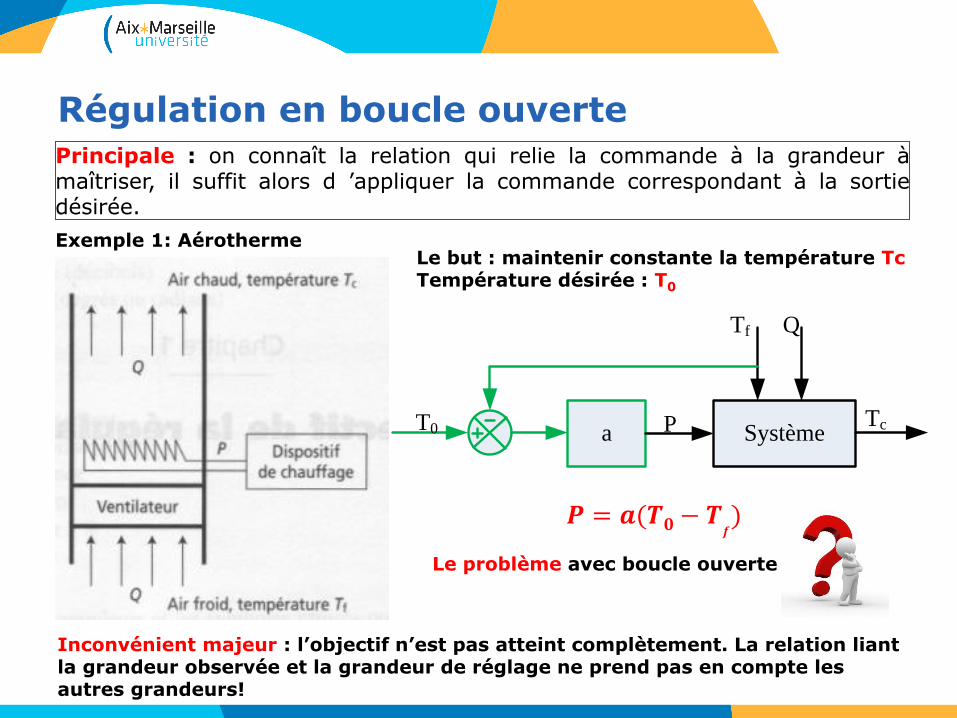
Régulation en boucle ouverte
Exemple 1: AérothermeLe but : maintenir constante la température TcTempérature désirée : T0
Principale : on connaît la relation qui relie la commande à la grandeur àmaîtriser, il suffit alors d ’appliquer la commande correspondant à la sortiedésirée.
SystèmeaTcT0
Tf Q
P
Le problème avec boucle ouverte
Inconvénient majeur : l’objectif n’est pas atteint complètement. La relation liant la grandeur observée et la grandeur de réglage ne prend pas en compte les autres grandeurs!
𝑷 = 𝒂(𝑻𝟎− 𝑻𝒇ሻ

Avantage : une variation de la grandeur observée entraîne une variation de l’action; l’objectif fixée peut alors être atteint!
Régulation en boucle fermée
Exemple 1: Aérotherme
Le but : maintenir constante la température TcTempérature désirée : T0
Principale : on observe le comportement de la grandeur à maîtriser et onajuste la commande en fonction de l ’objectif souhaité.
Systèmea
Tf Q
TcT0 P
𝑷 = 𝒌(𝑻𝟎− 𝑻𝒄ሻ
2, Modélisation des systèmes
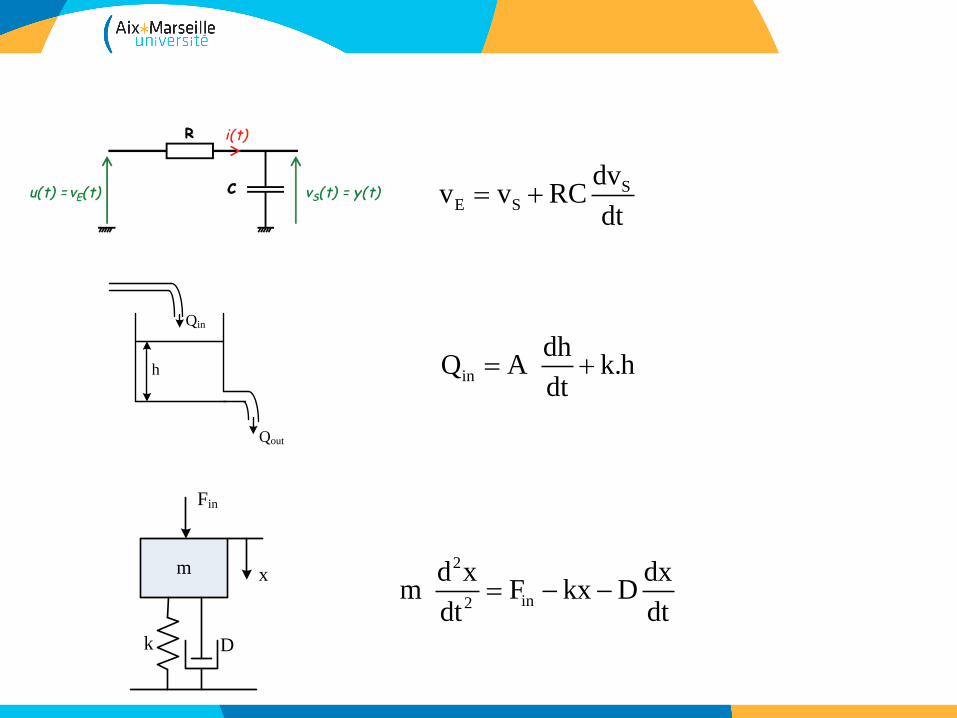
2
in2
d x dxm F kx D
dt dt
m
Fin
k D
x
Qin
Qout
h in
dhQ A k.h
dt
SE S
dvv v RC
dt
3, Outils mathématiques pour l’Automatique

Outils mathématiques pour l’Automatique
Transformée de Laplace
Transformée de Laplace inverse
Fonction de transfert
Résolution d’un problème à l’aide de la fonction de transfert

Résolution d’un problème à l’aide de la fonction de transfert
Exemple: Masse/ressort/ amortisseur
m
Fin
k D
x
2
2 in
d x dxm f kx D
dt dt
1 pour t 0( ) ( )
0 pour t<0inf t u t
L’équation différentielle :
2
( ) 1
( ) 4 3in
X p
F p p p
Fonction de transfert:
1( )inF p
pm=1; k=3; D=4

Résolution d’un problème à l’aide de la fonction de transfert
Exemple: Masse/ressort/ amortisseur
m
Fin
k D
x
2
( ) 1
( ) 4 3in
X p
F p p p
1( )inF p
p
2
1 1 1 1( )
( 4 3) 3 6( 3) 2( 1)X p
p p p p p p
31 1 1( )
3 6 2
t tx t e e
La table de transformées de Laplace

Table des transformées de Laplace
4, Réponse temporelle des systèmes

1. Système du premier ordre.
• Définition
• Réponse impulsionnelle
• Réponse indicielle
• Réponse à une rampe
• Exemple
2. Système du second ordre.
• Définition
• Réponse indicielle
• Exemple
Systèmes du premier ordre
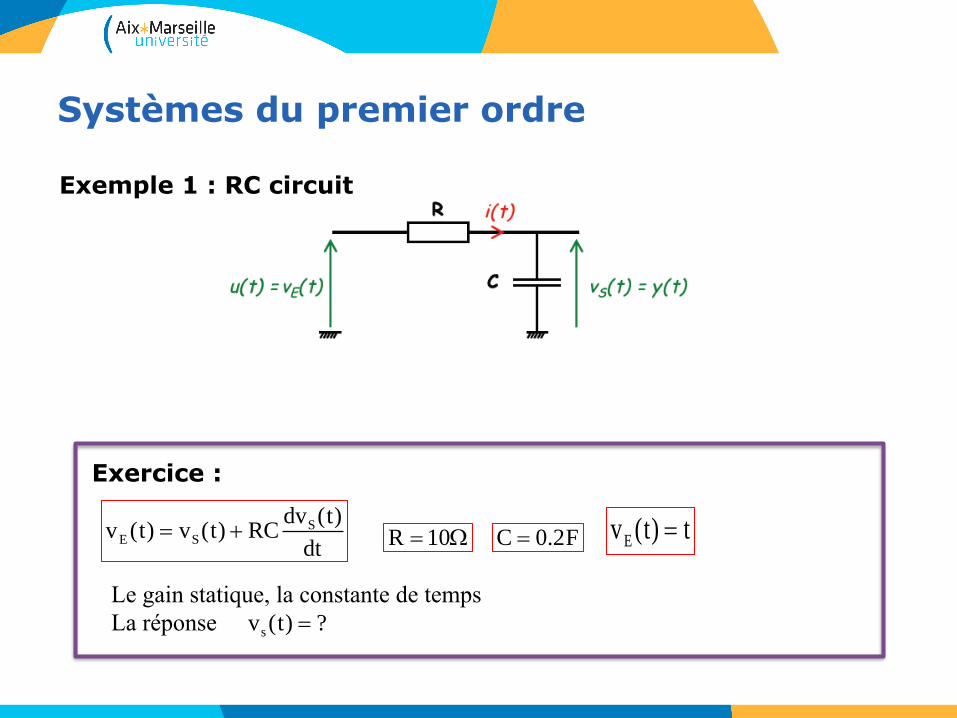
Exemple 1 : RC circuit
SE S
dv (t)v (t) v (t) RC
dt
Le gain statique, la constante de temps
La réponse
R 10 C 0.2F
sv (t) ?
Ev (t) t
Exercice :
Systèmes du second ordre
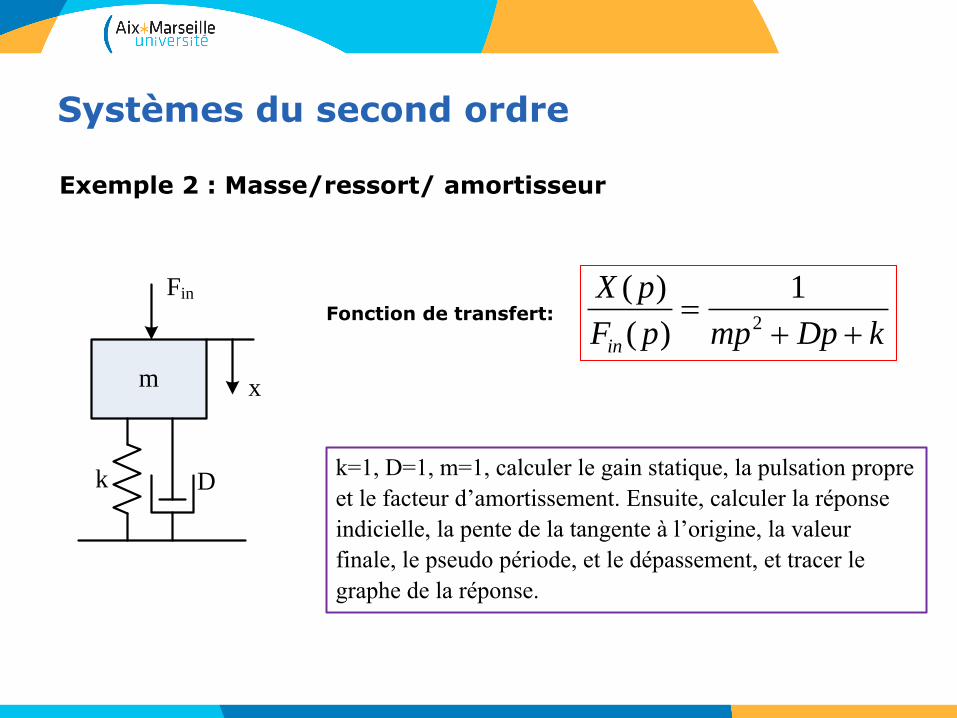
Exemple 2 : Masse/ressort/ amortisseur
m
Fin
k D
x
2
( ) 1
( )in
X p
F p mp Dp k
Fonction de transfert:
k=1, D=1, m=1, calculer le gain statique, la pulsation propre
et le facteur d’amortissement. Ensuite, calculer la réponse
indicielle, la pente de la tangente à l’origine, la valeur
finale, le pseudo période, et le dépassement, et tracer le
graphe de la réponse.
5, Réponse fréquentielle des systèmes
Réponse fréquentielle des systèmes
• Réponse fréquentielle des systèmes du 1er ordre (en Bode)
• Réponse fréquentielle des systèmes du 2nd ordre (en Bode)
• Réponse fréquentielle en Nyquist et Black

Bon courage et bonne chance pour vos examens!
Recommended