AUTOMATIQUE SYSTEMES ECHANTILLONNES 5 GE
SYSTEMES ECHANTILLONNES
Edition 2008 J.M RETIF Institut National des Sciences Appliquées de
Lyon
© [JM. RETIF], [2008], INSA de Lyon, tous droits réservés.
INSA 5GE JM RETIF Sommaire
i
1. GENERALITES.
..........................................................................................................
1
3. STABILITE D'UN PREMIER ORDRE.
...........................................................................
2
4. STABILITE D'UN SECOND ORDRE.
.............................................................................
5 4.1. Etude d'un second ordre en boucle fermée.
...................................................................................
5 4.2. Zone de stabilité dans le plan
paramétrique...................................................................................
7
5. CERCLE DE
STABILITE..............................................................................................
8
INSA 5GE JM RETIF Sommaire
ii
2. COMPORTEMENT EN ASSERVISSEMENT
............................................................... 14
2.1. Le numérateur du modèle du processus est
simplifiable..........................................................................15
2.2. Le numérateur du modèle du processus n’est pas simplifiable.
...............................................................16
2.3. Le numérateur du modèle du processus est partiellement
simplifiable...................................................16
3. REJET DES
PERTURBATIONS......................................................................................
17 3.1. Rejet de la perturbation sur la sortie.
.......................................................................................................17
3.2. Rejet d’un bruit de mesure.
......................................................................................................................19
3.3. Rejet de la perturbation sur la
commande................................................................................................19
4. ROBUSTESSE D’UNE COMMANDE PAR MODELE
INTERNE.............................. 19 4.1. Forme générale de la
commande..............................................................................................................19
4.2.
Robustesse................................................................................................................................................21
5. IMPLEMENTATION NUMERIQUE.
.............................................................................
23
INSA 5GE JM RETIF Sommaire
iii
2. COMMANDE POUR UN PROCESSUS A ZEROS
INSTABLES....................................................... 37
2.1. Dynamique en asservissement.
................................................................................................................
37 2.2. Dynamique en régulation.
........................................................................................................................
38 2.3. Mise en œuvre de la
méthode...................................................................................................................
39
3. COMMANDE POUR UN PROCESSUS A ZEROS STABLES.
......................................................... 41 3.1.
Dynamique en asservissement
.................................................................................................................
41 3.2. Dynamique en régulation.
........................................................................................................................
42 3.3. Mise en œuvre de la
méthode...................................................................................................................
43
4. PROCESSUS AVEC DES ZEROS STABLES ET
INSTABLES.........................................................
44 4.1. Dynamique en asservissement.
................................................................................................................
44 4.2. Dynamique en régulation.
........................................................................................................................
44 4.3. Mise en œuvre de la
méthode...................................................................................................................
45 4.4. Résumé pour la résolution de l’équation de
Bezout.................................................................................
46
5. CALCUL DE LA ROBUSTESSE D’UNE COMMANDE RST.
......................................................... 48 5.1.
Influence des perturbations sur la
sortie...................................................................................................
48 5.2. Influence des perturbations sur la commande.
.........................................................................................
49 5.3. Utilisation des fonctions de sensibilités pour
précaractériser R(z) et S(z).
.............................................. 50
6. RESUME POUR LA SYNTHESE D’UN CORRECTEUR RST.
...................................................... 51 6.1.
Identification du
processus.......................................................................................................................
51 6.2. Prise en compte du cahier des charges de
l’utilisateur.............................................................................
51
7. SYNTHESE ROBUSTE D’UNE COMMANDE
RST.......................................................................
53 7.1. Définition d’un
gabarit.............................................................................................................................
53 7.2. Procédure de
synthèse..............................................................................................................................
54
© [JM. RETIF], [2008], INSA de Lyon, tous droits réservés.
INSA 5GE JM RETIF Sommaire
iv
1. RAPPEL SUR LA REPRESENTATION D’ETAT CONTINU.
......................................................... 69 1.1.
Solution analytique des équations
d’état..................................................................................................
70 1.2. Calcul de la matrice de
transition.............................................................................................................
71 1.3. Rappel sur l’établissement d’un système d’état à partir
d’un bond graph. ..............................................
71
2. ETABLISSEMENT DES EQUATIONS D’ETAT
DISCRETES.........................................................
74 2.1. Echantillonnage sans élément de
maintien...............................................................................................
74 2.2. Echantillonnage avec un bloqueur d’ordre
zéro.......................................................................................
78
3. ASSOCIATION DE SYSTEMES DISCRETS.
...............................................................................
83 3.1. Mise en série de deux systèmes échantillonnés.
......................................................................................
83
3.1.1. Etablissement des nouvelles équations d’état. 83 3.1.2.
Application aux systèmes retardés. 84
3.2. Mise en parallèle de deux systèmes échantillonnés.
................................................................................
86
4. SOLUTION DES EQUATIONS
D’ETAT......................................................................................
87 4.1. Solution numérique.
.................................................................................................................................
87 4.2. Solution analytique pour le vecteur d’état.
..............................................................................................
87 4.3. Solution analytique pour le vecteur de sortie.
..........................................................................................
88
5. REPONSE IMPULSIONNELLE.
................................................................................................
89 5.1. Calcul
formel............................................................................................................................................
89 5.2. Calcul numérique.
....................................................................................................................................
89 5.3. Suite de pondération.
...............................................................................................................................
91
INSA 5GE JM RETIF Sommaire
v
TRANSMITTANCE
1. CAS MONOVARIABLE POUR UNE TRANSMITTANCE EN
P..................................................... 93 1.1.
Généralités.
......................................................................................................................................................
93 1.2. Méthode des modes.
........................................................................................................................................
93
1.2.1. Cas de pôles réels distincts. 94 1.2.2. Cas de pôles
complexes conjugués. 94 1.2.3. Cas d’un pôle multiple. 95
1.3. Décomposition
canonique................................................................................................................................
96
2. CAS MONOVARIABLE POUR UNE TRANSMITTANCE EN Z.
................................................... 98 2.1.
Généralités.
......................................................................................................................................................
98 2.2. Méthode des modes.
........................................................................................................................................
98
2.2.1. Cas de pôles distincts réels ou complexes. 98 2.2.2. Cas
d’un pôle multiple. 101
3. SYSTEME MULTIVARIABLE DEFINI PAR UNE MATRICE DE
TRANSFERT............................ 105 3.1. Méthode de
GILBERT...................................................................................................................................
105
4. PASSAGE DES EQUATIONS D’ETAT A UNE MATRICE DE
TRANSFERT................................. 108 4.1. Préambule.
.....................................................................................................................................................
108 4.2. Algorithme de LEVERRIER.
........................................................................................................................
108
© [JM. RETIF], [2008], INSA de Lyon, tous droits réservés.
INSA 5GE JM RETIF Sommaire
vi
2. PLACEMENT DE POLES DANS LE CAS MONO VARIABLE.
................................................... 121 2.1.
Décomposition
canonique..............................................................................................................................121
2.2. Décomposition d'état quelconque.
.................................................................................................................122
2.2.1. Calcul de K via une matrice M de transformation. 122 2.2.2.
Calcul de K par la méthode de Bass-Gura. 124 2.2.3. Calcul de la
matrice L. 125 2.2.4. Etapes pour la détermination de K et L
126
2.3. Exemple 1 : système monovariable du troisième ordre.
................................................................................127
3. RETOUR D’ETAT POUR LES SYSTEMES MULTIVARIABLES.
............................................... 132 3.1. Position
du problème.
....................................................................................................................................132
3.2. Etapes de calcul de la matrice de gain K.
......................................................................................................134
4. EXEMPLE : COMMANDE PAR RETOUR D’ETAT D’UNE COLONNE A DISTILLER.
............... 139 4.1. Contexte technologique.
................................................................................................................................139
4.2. Modélisation de la colonne à distiller.
...........................................................................................................140
4.3. Calcul du retour d’état.
..................................................................................................................................141
4.4. Calcul de la matrice L.
...................................................................................................................................147
4.5. Simulations.
...................................................................................................................................................148
© [JM. RETIF], [2008], INSA de Lyon, tous droits réservés.
INSA GE JM RETIF Stabilité d'un système asservi échantillonné
1
CHAPITRE 1 STABILITE D'UN SYSTEME ASSERVI ECHANTILLONNE
1. GENERALITES. Le concept de stabilité recouvre des domaines forts
divers, nous le rencontrons aussi bien dans le domaine des sciences
humaines (stabilité d'une institution, d'une civilisation...) que
dans celui des sciences physiques. Il est difficile de définir
précisément le concept de stabilité néanmoins il est possible d'en
avoir une perception empirique. Nous pouvons en effet la
caractériser par la propension qu'a un système à garder, ou
modifier légèrement son équilibre, par rapport à un environnement
perturbateur. Le fait de "garder un équilibre" peut paraître floue,
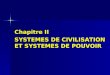
afin de préciser cette notion, nous prendrons l'exemple suivant.
Soit une bille, reposant sur une surface et ayant une position
stable au départ.
S1 S2 S3
Selon la forme de cette surface (S1, S2 ou S3), il est simple
d'admettre intuitivement, que par rapport à une perturbation finie
(vibration de la surface ou vent), la bille reprendra une position
d'équilibre après perturbation que sur les surfaces S2 et S3.
Notons que pour cet exemple : - Dans le cas 2, la bille reprendra
la même position que précédemment dans un temps fini, ici la
stabilité est dite asymptotique. - Dans le cas 3, la bille se
stabilise sur une autre position d'équilibre, la stabilité est dite
simple.
2. STABILITE D'UNE TRANSMITTANCE EN Z. La stabilité d'une
transmittance en z se ramène, comme dans le cas continu, à l'étude
des valeurs prises par ses pôles. Une approche naturelle est
d'étudier la réponse à une impulsion de KRONECKER. Trois cas sont à
distinguer :
2.1. Pôles simples réels
H z A z
− + dont l'original dans le temps vaut : h(k) = … + A ak + …
Il est clair que H(z) sera stable si lim ( )h k
k =
→∞ 0 c'est à dire si a < 1
2.2. Pôles complexes. S'il existe des pôles complexes ils sont
conjugués puisque les coefficients du dénominateur sont
réels.
( )( ) ( )( )H z B z
z j z j ( ) .......
2
z
.......... .= + − −
a kk( ) .... . .sin .= + β
φ
Pour que h(k) tende vers 0 lorsque n tend vers l'infini il faut que
a < 1 dans le cas contraire H(z) est instable.
2.3. Pôles multiples. S'il apparait un pôle d'ordre r
( ) ( ) ( ) ( )H z A z
− +
− +
− + +
z z a r−
( ) ( ) z z
z ar k
r les poles
−∑1 1
Le résidus au pôle se détermine par la relation ( )r r
d dz
1
1! .
ce qui donne pour une multiplicité d'ordre r un résidus prenant
l'expression suivante:
( ) ( ) ( ) ( ) ( )r k k
− − − − − + − +
! . . . ..... . .
La réponse impulsionnelle aura pour expression: h k T) C ar k k r(
. .= + −
− + 1
1 et ne sera stable que si a < 1 Théorème. Nous pouvons donc
conclure que quelque soit la forme du ou des pôles, si ceux ci sont
à l'intérieur d'un cercle unité le système sera stable. En fait ce
théorème présente d'une manière différente la condition de
stabilité d'une transmittance continue. Dans le plan des p la
stabilité pour p = r + j c s'exprime par r < 0 ce qui correspond
avec le changement de variable z = eT.p à | z | < 1.
3. STABILITE D'UN PREMIER ORDRE. Afin d'analyser la stabilité
correspondant à un pôle réel, nous allons illustrer notre propos en
étudiant la stabilité d'un premier ordre. Considérons un premier
ordre continu dont la commande se fait par une simple action
proportionnelle, conformément au schéma bloc figure 3.1.
1 1 1+T p.
1- -e p
Figure 3-1.
Le comportement discret du processus est donné par: H z Y z U
z
e p T p
3
e T T1
( )( ) ( )
avec ( )a K= − −λ λ. 1
Analyser la stabilité de cette fonction revient à calculer la
valeur du pôle z=a, s'il est compris entre zéro et un, le système
sera stable, et instable dans le cas contraire. Afin de vérifier la
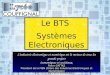
condition de stabilité nous allons étudier la réponse
impulsionnelle pour sept valeurs différentes de l'action
proportionnelle K (voir figure(3-2)). Cette réponse à pour
expression: ( ) ( )y k K a k( ) . .= − −1 1λ Nous prendrons pour
l'application numérique λ=0,7, pour différentes valeurs du gain K
les résultats algébriques sont résumés dans le tableau ci dessous,
et les réponses temporelles sur la figure 3-2.
Cas K a Γ(z) y(k) 1 -2 1,3 −
− 0 6 1 3 , ,z
( )− −0 6 1 3 1, . , k
2 -1 1 − − 0 3
1 ,
z
3 1 0,4 0 3 0 4 ,
,z −
( )0 7 0 1, . k−
5 4 -0,5 1 2 0 5
, ,z +
, z +
, ,z +
( )( )18 11 1, . ,− −k
Cet exemple corrobore évidement les conditions théoriques de
stabilité, on peut remarquer que lorsque le pôle est compris entre
0 et -1 la réponse est oscillatoire. Il faudra donc se garder
lorsque l'on aura le choix des pôles en boucle fermée de les placer
dans cet intervalle. Remarque importante.
Dans l'intervalle 0 +1 le pôle z=a correspond par exemple à
l'élément simple z
z a− , sa dynamique
ak correspond au comportement discret d'un premier ordre continu
précédé d'un bloqueur d'ordre zéro.
En effet sachant que z p
z
τ .
= −
τ
Lorsque a est proche de 1 la constante de temps est longue, pour la
valeur limite a=1 nous obtenons un échelon. Par contre lorsque le
pôle a est proche de 0 la constante de temps est faible à la limite
elle est nulle et nous avons un comportement type réponse
pile.
© [JM. RETIF], [2008], INSA de Lyon, tous droits réservés.
INSA GE JM RETIF Stabilité d'un système asservi échantillonné
4
1 2 3 4 5 6 7 8 9 100
0.05
0.1
0.15
0.2
1 2 3 4 5 6 7 8 9 10-0.35
-0.3
-0.25
-0.2
-0.15
-0.1
-0.05
0 Cas 2 a=1
1 2 3 4 5 6 7 8 9 10-0.1 0
0.1 0.2 0.3 0.4 0.5 0.6 0.7
Cas 4 a=0
1 2 3 4 5 6 7 8 9 10-5 -4.5
-4 -3.5 -3
1 2 3 4 5 6 7 8 9 10-1
-0.5
0
0.5
1
1.5 Cas 5 a = -0,5
1 2 3 4 5 6 7 8 9 10-2 -1.5 -1
-0.5 0
0.5 1
1.5 2
Cas 6 a= -1
1 2 3 4 5 6 7 8 9 10-4 -3 -2 -1 0 1 2 3 4
Cas 7 a = - 1,1
5
4. STABILITE D'UN SECOND ORDRE.
+
-
1 2 1 2
- - - -
+ - +
( ) ( ) ( )
1 2
1 2
L'analyse de la stabilité revient à étudier le polynôme ( ) ( )z z
K K2 0 08 1 3 0 4 0 02+ − + +. , . , , , . . Pour différentes
valeurs du gain K nous avons calculé les pôles, la pulsation propre
et le coefficient d'amortissement correspondant ainsi que la
fonction de transfert en boucle fermée. Les résultats obtenus sont
reportés dans le tableau suivant:
Cas Gain K pôles ω0 ξ0 Γ(z) 1 0,5 0,63 +j.0,11
0,63 -j.0,11 0,48 0,92 0 04 0 01
1 1 26 0 41
1 2
1 2 , . , .
, . , . z z
z z
0,59 0,72 0 104 0 026 1 1196 0 426
1 2
1 2 , . , .
, . , . z z
z z
3 8 0,33 +j.0,67 0,33 -j.0,67
1,15 0,25 0 64 0 16 1 0 66 0 56
1 2
1 2 , . , .
, . , . z z
z z
4 20 -0,15+j.0,88 -0,15-j.0,88
1,74 0,06 1 6 0 4 1 0 3 0 8
1 2
1 2 , . , .
, . , . z z
z z
2,36 -0,02 2 8 0 7 1 15 11
1 2
1 2 , . , .
, . , . z z
z z
− −
− − +
+ +
La position des pôles ainsi que les réponses impulsionnelles
correspondantes, figurent en 4.2. Nous constatons au vu de ces
réponses que les oscillations sont d'autant plus importantes que le
coefficient d'amortissement est plus faible.
© [JM. RETIF], [2008], INSA de Lyon, tous droits réservés.
INSA GE JM RETIF Stabilité d'un système asservi échantillonné
6
0
0.01
0.02
0.03
0.04
0.05
0.06
0.07
0.02 0.04 0.06 0.08
-0.2
0
0.2
0.4
0.6
0.8
-1
-0.5
0
0.5
1
1.5
2
-10
-5
0
5
-1
7
Soit une transmittance en z : 2az.1a2z
2bz1b 2z.2a1z.1a1
−+− , l'étude de la stabilité
revient à étudier les deux pôles de ce transfert. Nous allons
exprimer la condition de stabilité dans le plan a2 a1 et définir la
zone à l'intérieure de laquelle le système est stable. Pour des
pôles réels:
Dans ce cas ( )a a1 2
24 0− >. ce qui implique a a
2 1 2
4 < , dans le plan a2,a1 les pôles se trouvent en
dessous de la parabole correspondante
z a a a
− < − + −
<+1
ces deux inéquations s'expriment par a a1 21> − − et a a1 21>
− + . La zone de stabilité se trouve
en dessous de la parabole a a
2 1 2
4 = et au dessus des droites de pente -1 et 1 que nous venons
de
définir ( voir figure .4.2). Pour des pôles complexes
Ici ( )4 2 1 2.a a− >0 ce qui implique a
a 2
1 2
4 > nous nous trouvons donc au dessus de la parabole
déjà décrite. Dans ce cas les deux pôles sont complexes conjugués
et valent:
z a j a a
1 1 2 1
2 1 2 1
= − − −.
dont le module z a= 2 . Le coefficient a2 étant positif (condition
du discriminent négatif) un z < 1 nécessite a2<1. La zone de
stabilité dans le cas complexe se situe donc au dessus de la
parabole et en dessous de la droite a2=1 ( voir figure .4.3).
-2 -1.5 -1 -0.5 0 0.5 1 1.5 2 -2
-1.5
-1
-0.5
0
0.5
1
1.5
2
a1
a2
8
Dans la zone ou la réponse est oscillatoire nous avons représenté
le réseau de courbes à coefficient d'amortissement constant et à
pulsation fixe. La pulsation utilisée est = ω.T .
-2 -1.5 -1 -0.5 0 0.5 1 1.5 2 0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
Figure 4.4
5. CERCLE DE STABILITE. Dans le cas continu pour qu'un système soit
stable, il est impératif que ses pôles se trouvent dans le
demi-plan gauche. Pour les systèmes discrets le changement de
variable z eT.p= transforme l'axe imaginaire en un cercle de rayon
unité à l'intérieur duquel, doivent se trouver les pôles, pour
assurer la stabilité.
zône instable Re
-r
c
-c
Im
Re
β
−β
α
Figure 5.1 Un pôle double est associé à une pulsation propre ω0 et
un coefficient d'amortissement ξ0, Nous rappelons que pour les
systèmes continus les lieux à amortissement constants se trouvent
sur des droites de mêmes pentes, et le lieu de pulsation constante
sur un cercle.
© [JM. RETIF], [2008], INSA de Lyon, tous droits réservés.
INSA GE JM RETIF Stabilité d'un système asservi échantillonné
9
Nous allons maintenant voir comment se transforment ces lieux dans
le cas discret.
Soit une paire de pôles ( )( ) ( )( ) ( )p r j c p r j c p r p r c+
+ + − = + + +. ) . . . .2 2 22 (4-1)
= + +p2 0 0
22. .ξ ω ω en identifiant on obtient les valeurs de r et de c
soit:
r = ξ ω. 0 et c = −ω ξ0 21. (4-2)
Dans le domaine continu les pôles de l’équation (4-1) sont : cjr1p
⋅−−= et cjr2p ⋅+−= (4-3)
Dans le cas discret nous aurons deux pôles z1=α+j.β et z2= α-j.β
(4-4)
correspondant au polynôme: P(z)= ( ) ( )( )z z z z− −1 2. ( )( ) (
)( )= − + − −z j z jα β α β. . . (4-5)
P(z)=z z2 2 2 2− + +
. .α α β (4-6)
Pour passer du plan des p au plan des z nous effectuerons la
transformation : z eT p= . = ( )cjrTe ⋅±−⋅− TcjeTre ⋅⋅±⋅⋅−=
on obtient : ( ) ( )( )TcsinjTccosTre1z ⋅⋅+⋅⋅⋅−= ( ) ( )(
)TcsinjTccosTre1z ⋅⋅−⋅⋅⋅−= En identifiant à (4-5) il vient:
01.T.0sin.T..e 00 (4-7)
Ces équations paramétriques permettent de construire dans le plan
des pôles les courbes à amortissement constant et à pulsation
constante.
-1-0.5 0 0.5 1 0
0.2
0.4
0.6
0.8
1
Im(z)
0,1 = 0ξ
π 10.T
10
Remarques sur le placement de pôles. Des pôles à l'intérieur du
cercle de rayon unitaire assurent de la stabilité du système,
cependant si ces pôles sont à parties réelles négatives, ou si
leurs composantes imaginaires sont trop importantes, cela entraîne
des modes oscillatoires à proscrire. Dans un contexte de placement
de pôles on limitera l'aspect oscillatoire en se fixant des bornes
pour le coefficient d'amortissement. En outre le temps de montée
étant lié à la pulsation propre celle-ci sera aussi limitée entre
une borne inférieure correspondant à la vitesse la plus lente
désirée et une limite haute au-delà de laquelle il y a risque de
saturation de la commande. Par exemple pour une fréquence
d'échantillonnage de 10 Hz, si on limite le coefficient
d'amortissement et la pulsation tel que: 0.7<ξο<1 et
2.π<ω0<4.π le domaine ou doivent se trouver les pôles est
considérablement restreint (figure 5.3).
-0.5 0 0.5 1
0,1
= 0ξ
© [JM. RETIF], [2008], INSA de Lyon, tous droits réservés.
INSA GE JM RETIF Commande par modèle interne
11
1. Introduction. 1.1. Principe de la commande par modèle
interne.
La commande par modèle interne repose dans son principe sur une
représentation explicite du processus P(z) et de son modèle )z(P .
Ainsi, pour compenser les erreurs de modélisation, la commande
traitera l’écart de comportement ν entre le processus et son
modèle. Sur le schéma bloc décrit figure 1-1, le correcteur C(z)
permet de définir la dynamique en asservissement et le filtre F(z)
sera utilisé pour définir la dynamique de rejet de la perturbation
de sortie. Ce type de commande fait partie de la classe des
correcteurs qui traite séparément la consigne et la mesure, à
contrario, pour la commande classique (type PID) seul le signal
d’écart consigne mesure est traité.
Dans ce cas, la commande est régie par deux transmittances et la
grandeur U(z) a pour forme : )z(Y)z(2)z(W)z(1)z(U KK ⋅+⋅=
(1-1)
Les deux transmittances )z(2et)z(1 KK permettent d’obtenir des
réponses différentes en asservissement et pour le rejet des
perturbations. Nous pouvons remarquer que lorsque )z()z(2et)z()z(1
KKKK −== nous retrouvons le correcteur classique pour le quel la
commande ( ))z(Y)z(W)z()z(U K −⋅= . Dans la structure de commande
par modèle interne nous avons : P(z) Transmittance du processus.
)z(P Modèle du processus utilisé pour la commande. C(z) Correcteur
pour fixer la dynamique en asservissement. F(z) Filtre de rejet des
perturbations.
)z(P
)z(F
)z(fν
)z(ν
)z(ε
Processus
Figure 1-1 Lors de la synthèse de ce type de commande, nous
considérerons que les comportements du processus P(z) et de son
modèle )z(P sont identiques.
© [JM. RETIF], [2008], INSA de Lyon, tous droits réservés.
INSA GE JM RETIF Commande par modèle interne
12 Il est immédiat de constater que lorsque )z(P)z(P = la structure
de la commande par modèle interne décrite figure 1-1 devient
:
Figure 1-2 Ainsi, dans son principe, la commande par modèle interne
repose sur une conception en boucle ouverte. Dans ce cas le
comportement désiré sera déterminé par la transmittance :
)z(P)z(C )z(W )z(Y
)z( ⋅==Γ (1-2)
La nécessité d’avoir, à l’équilibre, une sortie qui rejoint la
valeur de consigne, impose à la fonction de transfert )z(Γ un gain
statique unitaire. Ce n'est qu'une fois la commande définie que
l'on pourra apprécier l'influence d'une erreur de modélisation sur
les performances en asservissement et régulation.
Remarque importante.
Il est clair, au vu de la structure de commande (figure 1-2), que
celle-ci étant établie en boucle ouverte, le processus doit être
naturellement stable. Dans le cas contraire la commande par modèle
interne n'est envisageable qu'en ayant préalablement stabilisé le
système par une boucle de régulation classique.
1.2. Analyse de la commande par modèle interne en présence de
perturbations. Dans un contexte réel, le modèle )z(P a un
comportement différent du processus )z(P . En outre, si celui-ci
possède un capteur bruité par un signal bW et se trouve affecté
d’une perturbation yW sur la sortie et d’une perturbation uW sur la
commande, le schéma bloc est le suivant :
)z(P
)z(F
INSA GE JM RETIF Commande par modèle interne
13 Nous nous retrouvons dans le cas classique où la sortie est
régie par 4 entrées constituées de la consigne et des 3
perturbations. Dans ce cas la fonction de transfert reliant la
sortie Y(z) aux différentes entrées aura la forme suivante :
( ) )z(yu)z(yb)z(yy)z(W )z(P)z(P)z(F)z(C1
)z(P)z(C)z(Y εεε +++⋅ −⋅+
⋅ = (1-3)
Dans cette expression de Y(z), nous pouvons distinguer : La
dynamique en asservissement.
( ) )z(W )z(P)z(P)z(F)z(C1
• L’influence sur la sortie de la perturbation de sortie.
( ) yW )z(P)z(P)z(F)z(C1
• L’influence sur la sortie d’un bruit de mesure.
( ) bW )z(P)z(P)z(F)z(C1
( ) uW )z(P)z(P)z(F)z(C1 )z(P)z(F)z(C1)z(P
+=ε (1-7)
Sachant que le modèle )z(P est imprécis, il est nécessaire de
vérifier, lorsque celui-ci a un gain statique différent du
processus, que cela n’entraîne pas des erreurs rédhibitoires sur la
grandeur de sortie. Lors de la synthèse de C(z), nous avons imposé
un gain statique unitaire au transfert )z(Γ , il vient donc :
1)1(P)1(C)1( =⋅=Γ . En outre le filtre F(z) doit avoir un gain
statique unitaire afin de compenser sans biais, l’erreur de
modélisation. A partir des équations (1-4) à (1-7) il vient : •
Pour l’aspect asservissement.
)1(W)1(Y)1(W 1)1(P)1(C1
)1(P)1(C)1(W )1(P)1(F)1(C)1(P)1(F)1(C1
= (1-8)
Avec cette structure de commande, le correcteur a un gain statique
égal à l’inverse du gain du modèle. Nous pouvons ici vérifier que
lorsque )1(P)1(P ≠ , l’erreur statique en asservissement sera
nulle. • Pour le rejet de perturbation sur la sortie.
( ) 0)1(yyyW )1(P)1(C
)1(P)1(C1 yW
)1(P)1(P)1(F)1(C1 )1(P)1(F)1(C1)1(yy =⇒⋅
⋅⋅− = εε
Pour une perturbation permanente sur la sortie, l’influence sur
celle-ci sera nulle. • Pour l’influence d’un bruit de mesure.
( ) bW)1(ybbW )1(P)1(C )1(P)1(C
INSA GE JM RETIF Commande par modèle interne
( ) ( )
= εε
Comme pour le bruit de sortie, les perturbations permanentes sur la
commande sont rejetées. Maintenant que nous avons montré la
consistance de la commande par modèle interne, nous allons nous
attacher à la synthèse des différentes parties la constituant. Dans
un premier temps, nous nous intéresserons aux aspects inhérents à
la maîtrise de la dynamique en asservissement, dans un second temps
nous verrons comment fixer la dynamique de rejet des perturbations.
In fine nous aborderons les aspects robustesse et montrerons la
généralité de ce type de commande.
2. Comportement en asservissement Comme il a été vu précédemment,
dans le cas idéal, la commande par modèle interne revient au schéma
suivant :
)z(P)z(C
)z( ⋅==Γ (2-1)
A ce niveau, s'offrent à nous deux possibilités. Pour la première
on considère que la dynamique en asservissement est déterminée par
le produit ˆ(z) C(z).P(z)Γ = . Il s’ensuit, dans le cas idéal, au
regard de l’équation (1-5) que l’erreur amenée par une perturbation
sur la sortie sera : ( )yy (z) 1 (z) F(z)= − Γ ⋅ε . La dynamique de
rejet de perturbation sera donc plus lente que celle de
l’asservissement. Au mieux, si F(z)=1, elles seront identiques.
Généralement l’utilisateur désire un rejet de la perturbation de
sortie plus rapide que la dynamique d’asservissement. C’est pour
cette raison que nous n’utiliserons pas cette procédure de
conception de la commande. Pour avoir des dynamiques différentes
pour l’asservissement et le rejet des perturbations, il est
impératif que le transfert )z(Γ soit le plus rapide possible. Cette
deuxième approche aura notre préférence et nous allons dans ce qui
suit la détailler. Dans ce cas, pour satisfaire la dynamique
désirée en asservissement, on adjoint en amont de la commande par
modèle interne, un modèle de référence série conformément au schéma
suivant.
)z(P)z(C
U(z)W'(z)
)z(Y)z( ⋅==Γ très rapide, la dynamique en asservissement
sera alors régie par la transmittance G(z).
© [JM. RETIF], [2008], INSA de Lyon, tous droits réservés.
INSA GE JM RETIF Commande par modèle interne
15
≈⋅⋅= (2-2)
Si l’on pose, pour le modèle du processus, dz )z(A )z(B)z(P −⋅= ,
l’expression du correcteur pour
un comportement « pile retardé » ( 1 d(z) z− −Γ = ) est
particulièrement simple :
1(z) A(z)C(z) (z) z B(z)P(z)
−Γ = = Γ ⋅ ⋅ (2-3)
Nous constatons que cette méthode simplifie le numérateur du modèle
du processus et ne doit pas conduire pour le correcteur à des pôles
instables ou trop oscillatoires. Cette remarque va orienter le
choix du transfert )z(Γ .
La simplification de zéros instables conduit à une commande
divergente. Il est cependant prudent, afin d'avoir une commande qui
n’oscille pas, d'éviter de simplifier les zéros trop oscillatoires.
Si nous limitons, pour des zéros doubles le coefficient
d’amortissement à
5,00 =ξ et pour un zéro simple la valeur –0,4 comme limite
inférieure, la zone à l’intérieur de laquelle doit se trouver les
zéros du modèle est représentée sur la figure 2-3.
Figure 2-3. Nous allons maintenant décliner les différentes
situations et voir comment choisir )z(Γ .
2.1. Le numérateur du modèle du processus est simplifiable.
Dans ce cas, on cherchera le transitoire le plus rapide du
transfert Y z W z
( ) ( )' , en reportant la
dynamique en asservissement sur le modèle de référence série
G(z).
G z B z A z
m
m ( )
Γ( ) ( ) ( )
z d= = − (2-5)
Si l'on s'autorise à simplifier le numérateur et le dénominateur du
modèle, la vélocité la plus grande sera une réponse pile au retard
près, ce qui donne : Γ( )z z d= − −1
Le correcteur vaut alors : C(z A z B z
z) ( ) ( )
INSA GE JM RETIF Commande par modèle interne
16 Ici la dynamique d'asservissement est reportée sur le modèle de
référence série G(z). Le transfert total en poursuite devient alors
:
dz1z ....2z.2ma1z.1ma1
+−+−+ =−⋅−⋅= (2-7)
Afin d'éviter tout retard indésirable dans le profil de la sortie,
on veillera à ce que G(z) soit un système possédant un coefficient
bm0 non nul. Application. Voir exemple 1 § 6-1.
2.2. Le numérateur du modèle du processus n’est pas simplifiable.
Si le numérateur B(z) n’est pas simplifié par le correcteur C(z),
il est évident qu’il se retrouvera dans la fonction de transfert
)z(Γ . Sachant que pour celle-ci on désire un gain statique
unitaire, la fonction de transfert la plus rapide sera :
dz mb2b1b
)1(B )z(A)z(C = (2-9)
Application. Voir exemple 1 § 6-2.
2.3. Le numérateur du modèle du processus est partiellement
simplifiable. Ici, il est nécessaire dans la représentation du
modèle du processus )z(P de séparer les parties simplifiables de
celles qui ne le sont pas. La forme générale du modèle du processus
est :
dz naz.naa...3z.3a2z.2a1z.1a1
nbz.nbb...3z.3b2z.2b1z.1b )z(P −⋅
−++−+−+− = (2-10)
Le numérateur peut se factoriser en deux polynômes Bi(z) et Bs(z)
correspondant respectivement aux zéros instables et stables du
numérateur.
dz )z(A
.3z.3ib2z.2ib1z.1ib)z(iB +−+−+−= (2-13)
Le polynôme )z(iB représente la partie du numérateur que l’on ne
veut pas simplifier, en conséquence il se retrouvera dans le
comportement de )z(Γ .
Soit : dz )1(iB )z(iB
INSA GE JM RETIF Commande par modèle interne
17 Il est normal que dans ce transfert l'on retrouve l'intégralité
du retard ainsi que la partie non simplifiable, la présence de Bi (
)1 assure un gain unitaire à Γ( )z . Ce transfert s'exprime par
rapport au correcteur et au processus par :
dz )z(A
).z(sB).z(iB )z(C)z(P)z(C)z( −⋅=⋅=Γ (2-15)
De ces deux dernières équations ((2-4) & (2-5) ) il est aisé de
déterminer le correcteur soit:
C(z A z
dz )1(iB )z(iB
Il est à remarquer que le transfert B z B
i
i
( ) ( )1
est à réponse impulsionnelle finie, ce qui implique un
suivi relativement correct de Y par rapport à W'.
3. Rejet des perturbations. 3.1. Rejet de la perturbation sur la
sortie.
Nous allons analyser ici l’influence sur la sortie Y d’une
perturbation de sortie yW . Nous nous
placerons dans le cas idéal où )z(P)z(P = , dans ce cas l’erreur
sur la sortie vaut :
( ) )z(yW)z(P).z(F).z(C1)z(yy ⋅−=ε (3-1)
( ) )z(yW)z().z(F1)z(yy ⋅Γ−=ε (3-2)
Le schéma bloc en régulation dans le cas idéal est donc:
C(z)F(z)
)z(yyε
)z(Γ
Figure 3-1 Nous allons maintenant étudier comment caractériser F(z)
afin d’obtenir le rejet désiré de la perturbation yW . Afin de ne
pas alourdir l’écriture nous allons considérer dans ce qui suit un
retard nul (d=0).
© [JM. RETIF], [2008], INSA de Lyon, tous droits réservés.
INSA GE JM RETIF Commande par modèle interne
18
3.1.1. Cas de zéros stables
Comme nous l'avons vu précédemment, si l’on simplifie B(z), il est
facile d’avoir 1z)z( −=Γ .
Dans ce cas : )z(yW1z).z(F1)z(yy ⋅
−−=ε (3-3)
A titre illustratif, admettons que l’on désire un rejet de
perturbation tel que : k)k(yy ρ=ε , ce qui donne
1z1
1)z(yy −⋅ρ− =ε .
Pour une perturbation en échelon de yW , à partir de la relation
(3-3) il vient :
1z)z(F1 1z1
1z1 )z(yW
)z(yy −⋅−= −⋅ρ−
ρ− =⇒
Nous retrouvons ici la transmittance d’un premier ordre précédé
d’un bloqueur d’ordre zéro dont la réponse indicielle est avancée
d’une période d’échantillonnage.
F(z)
Figure 3-2
On voit apparaître clairement sur la figure 3-2, qu'au retard près,
F(z) fixe explicitement le rejet de la perturbation.
3.1.2. Cas de zéros instables.
Sachant que la transmittance rapide désirée vaut ici )1(B )z(B)z(
=Γ (relation (2-8), ici le transfert
en régulation s'exprime, dans le cas idéal par :
)z(F )1(B )z(B1
ε (3-4)
Nous remarquerons que le transfert )1(B )z(B est à réponse
impulsionnelle finie, par conséquent en
première approximation F(z) fixera comme précédemment la dynamique
en régulation.
3.1.3. Cas des zéros partiellement instables.
Ici )1(iB )z(iB)z( =Γ , dans ce cas )z(F
)1(iB )z(iB1
ε (3-5)
Le transfert )1(iB )z(iB étant rapide, nous considérerons que c’est
le filtre F(z) qui fixe la dynamique
de rejet de la perturbation.
© [JM. RETIF], [2008], INSA de Lyon, tous droits réservés.
INSA GE JM RETIF Commande par modèle interne
19 3.2. Rejet d’un bruit de mesure.
Ici dans le cas idéal la relation (1-6) devient :
bW)z(P)z(F)z(C)z(yb ⋅⋅⋅−=ε (3-6)
bW)z()z(F)z(yb ⋅Γ⋅−=ε bW)z(F ⋅−≈ (3-7)
Comme F(z) possède un gain statique unitaire, une erreur
systématique se répercutera intégralement sur la sortie.
3.3. Rejet de la perturbation sur la commande. Pour une
perturbation sur la commande l’équation (1-7) vaut :
( ) uW)z(P)z(F)z(C1)z(P)z(yu ⋅⋅⋅−+=ε (3-8)
( ) uW)z()z(F1)z(P)z(yu ⋅Γ⋅−+=ε ( ) uW)z(F1)z(P ⋅−≈ (3-9)
La dynamique de rejet correspond à celle liée à yW filtrée par le
processus. Nota : On remarquera que dans le cas d’une commande
classique, il en est de même puisque
yySPyuS ⋅= .
4. Robustesse d’une commande par modèle interne. La structure de la
commande par modèle interne est particulière et ne se prête pas
directement à l’expression de la robustesse et des fonctions de
sensibilités. Nous allons montrer que cette commande peut se mettre
sous une forme générale pour laquelle la grandeur de commande U est
fonction de deux transmittances. La première traite la consigne W
et la seconde la mesure Y. A partir de cette formulation, nous
pourrons ramener le schéma de commande par modèle interne à un
bouclage classique.
4.1. Forme générale de la commande. A partir du schéma général
donné figure 1-1, nous pouvons exprimer la commande en fonction du
correcteur C(z), du filtre F(z) et du modèle )z(P .
)z(Y. )z(P).z(F).z(C1
)z(F).z(C)z('W. )z(P).z(F).z(C1
= (4-1)
Nous voyons ici que cette commande dépend de la consigne
intermédiaire W' et de la mesure Y. Cette structure correspond à un
système multivariable recevant deux entrées et délivrant une sortie
U. Ainsi, la commande U peut donc se calculer à partir de deux
fonctions de transfert que nous noterons )z(1K et )z(2K .
)z(S )z(T)z(1 =K =
− = (4-3)
Avec ces notations, la commande peut se mettre sous la forme:
)z(Y).z(2)z('W).z(1)z(U KK −= = − T z S z
W z R z S z
Y z ( ) ( )
INSA GE JM RETIF Commande par modèle interne
20 A partir de cette formulation, le schéma de commande, en
présence de perturbations, devient :
+W' T(z) S(z)
Figure 4-1
Pour implanter la commande par modèle interne sous cette forme, il
faut déterminer les polynômes R(z), S(z) et T(z) qui sont pris sous
la forme suivante :
+−+−+−+= 3z.3r 2z.2r
1z.1r0r)z(R (4-5)
+−+−+−+= 3z.3s2z.2s1z.1s1)z(S (4-6)
+−+−+−+= 3z.3t2z.2t1z.1t0t)z(T (4-7)
)z(S )z(TU −= (équation (4-1))
−−⋅−−⋅−−⋅− −−⋅−−⋅−⋅−
+−⋅+−⋅+⋅=
)2k('w2t)1k('w1t)k('w0t)k(u
Pour obtenir ces équations de commande, il nous faut donc trouver
les relations liant les polynômes R(z), S(z) et T(z) en fonction
des transmittances C(z), F(z) et )z(P . Pour cela nous poserons
:
F z N z D z
f
f ( )
c
c )
= dz. )z(A )z(B)z(P −= (4-8)
L’identification de la relation (4-1) aux équations (4-8) permet
d’obtenir pour ces trois polynômes : R z N z N z A zc f( ) ( ). (
). ( )= (4-9)
d fcfc z).z(B).z(N).z(N)z(A).z(D).z(D)z(S −−= (4-10)
T z N z D z A zc f( ) ( ). ( ). ( )= (4-11) Cette nouvelle
structure de la commande par modèle interne peut évidemment se
remettre sous sa forme originale.
© [JM. RETIF], [2008], INSA de Lyon, tous droits réservés.
INSA GE JM RETIF Commande par modèle interne
21 En effet si nous exprimons, d’après le schéma de la figure 4-1,
la sortie en fonction de la consigne et des perturbations, nous
obtenons :
Wu 2P1
P bW
2P1 2P
yW 2P1
1'W 2P1
K KK
K (4-12)
( ) +⋅ −⋅+
+ (4-13)
Mettre la commande par modèle interne sous une forme correspondante
au schéma de la figure 4-1 permet de reformuler celle-ci, sous une
forme plus générale faisant appel à trois polynômes R(z), S(z) et
T(z). Cependant le principal intérêt de la formulation qui vient
d’être présentée est de mettre le schéma de commande sous une forme
permettant d’exprimer la robustesse et les fonctions de
sensibilité.
-
Figure 4-2
Si nous comparons cette dernière figure au schéma classique de la
commande d'un processus
P z B z A z
( ) ( ) ( )
( ) ( ) ( )
= , nous constatons que les schémas sont équivalents.
Nous pourrons donc, à partir de cette formulation, exprimer les
différentes marges et fonctions de sensibilités inhérentes à
l’étude de la robustesse d’une commande. En conclusion, pour
déterminer la robustesse d'une commande par modèle interne, dans un
premier temps, il faut exprimer les polynômes R(z) et S(z) à partir
de transmittances de la commande par modèle interne. R z N z N z A
zc f( ) ( ). ( ). ( )= (4-14)
d fcfc z).z(B).z(N).z(N)z(A).z(D).z(D)z(S −−= (4-15)
INSA GE JM RETIF Commande par modèle interne
22 A partir de ces polynômes les fonctions de sensibilité
s’exprimeront par les relations habituelles. • Sensibilité de la
sortie à une perturbation sur la sortie
S K Pyy =
+ .
Sensibilité de la sortie à une perturbation sur la mesure
S K P
Sensibilité de la sortie à une perturbation sur la commande
P.K1 PSyu +
S.BSyu + = (4-18)
• Sensibilité de la commande à un bruit de sortie ou de
mesure
P.K1 KSuy +
INSA GE JM RETIF Commande par modèle interne
23
5. Implémentation numérique. La commande nécessite le calcul de
quatre fonctions de transfert, l'ordre dans lequel doit se
séquencer les équations récurrentes n'est pas arbitraire. Il est
tout d'abord nécessaire d'analyser les degrés respectifs de chacun
des transferts ( en puissance de z positive). Deux cas sont à
envisager : S'il y a égalité, le gain pour une pulsation infini est
non nul, ou autrement formulé la sortie à l'instant k, dépendra de
l'entrée au même instant. Si le degré du dénominateur est supérieur
au degré du numérateur la sortie à l'instant k dépendra
d'échantillons du passé de l'entrée. Ces remarques étant faites,
analysons les degrés relatifs des différents transferts. • Le
modèle du processus : La forme utilisée montre que )k(y dépend des
échantillons passés de la commande U.
• Le modèle de référence G(z). Ici les degrés sont identiques
(bm0<>0) donc w'(k) dépendra de w(k). • Le correcteur C(z) et
le filtre F(z). Ces transmittances ont le même degré au numérateur
qu'au dénominateur. De toutes ces contraintes il est aisé, à partir
du schéma de commande rappelé figure 5-1, de déterminer le
séquencement des équations récurrentes :
+W' Bm(z)
Figure 5-1
<Mesure de y(k) et w(k)> <calcul de la sortie y(k) du
modèle )z(P ( )y k =f(u(k-1),u(k-2),....)> <calcul de l'écart
ν(k)=y(k)- ( )y k > <calcul de l'écart filtré
νf(k)=f(ν(k),ν(k-1)...)> <Calcul du modèle de référence série
w'(k)=f(w(k),w(k-1)...)> <Calcul de ε(k)=w'(k)-νf(k)>
<Calcul de u(k)=f (ε(k),ε(k-1)...)>
© [JM. RETIF], [2008], INSA de Lyon, tous droits réservés.
INSA GE JM RETIF Commande par modèle interne
+
-
Dans ce cas l'algorithme aura la forme suivante:
<Mesure de y(k) et w(k)> <Calcul de la sortie y(k) du
modèle ( )y k =f(ε(k-1),ε(k-2),....) > <calcul de l'écart
ν(k)=y(k)- ( )y k > <calcul de l'écart filtré
νf(k)=f(ν(k),ν(k-1)...)> <Calcul du modèle de référence série
w'(k)=f(w(k),w(k-1)...)> <Calcul de ε(k)=w'(k)-νf(k)>
<Calcul de u(k)=f (ε(k),ε(k-1)...)>
© [JM. RETIF], [2008], INSA de Lyon, tous droits réservés.
INSA GE JM RETIF Commande par modèle interne
25
6. Exemples. 6.1. Exemple 1.
Considérons un processus du deuxième ordre dont l’identification,
pour une période d’échantillonnage T=0,1s, a fourni la
transmittance suivante :
2z.72,01z.7,11
2z.4,01z.8,0)z(P −+−−
−+− = .
Ce modèle possède deux pôles à l’intérieur du cercle unité (z1=0,8
et z2=0.9), nous pouvons donc appliquer la commande par modèle
interne. Son numérateur présente un zéro négatif ( 5,0z −= ) ce qui
va conduire à des oscillations sur la grandeur de commande u(k). En
effet ce zéro du modèle conduira à la présence d’un pôle pour le
correcteur qui fera apparaître un terme en ( )k5,0− . Afin de juger
l’influence d’un zéro stable négatif, nous considérerons ici que
ces oscillations seront acceptables et simplifierons le numérateur
B(z).
6.1.1. Choix de la dynamique en asservissement.
6.1.1.1. Calcul de C(z) Le numérateur B(z) du modèle du processus
étant simplifiable, comme le système est sans retard pur (d = 0)
nous pouvons avoir une réponse pile.
)z(P).z(C1z )z('W
6.1.1.2. Calcul du modèle de référence série G(z)
Pour une consigne W en échelon on désire que la sortie progresse en
rampe et que la valeur de la consigne soit atteinte en m.T périodes
d’échantillonnages (fig 6-1).
Figure 6-1
Le transfert global en asservissement a pour expression : )z()z(G
)z('W
)z(Y)z(G )z(W )z(Y
Qui dans notre cas vaut : 1z)z(G )z(W )z(Y −⋅=
Exprimons Y(z) comme la différence de deux rampes décalées d’un
retard m.T.
0 5 10 15
k
y(k)
INSA GE JM RETIF Commande par modèle interne
26
− −
−
⋅ = ⋅ ⋅ −
⋅ −
−−
−−
= − − + −
6.1.2. Rejet des perturbations, calcul de F(z). Nous désirons pour
la perturbation de sortie yW , avoir une dynamique de l’erreur sur
la sortie
du premier ordre, k)k(yy ρ=ε avec 5,0=ρ . Conformément à l’équation
(1-5) du § 1 l’erreur due à une perturbation sur la sortie
vaut : )z(yW)z(F1z1)z(yy ⋅
1z1
5,0 )z( )z(f)z(F
)1k(f5,0)k(5,0)k(f −ν⋅+ν⋅=ν
6.1.3. Algorithme de commande. Il faut ici calculer les équations
récurrentes correspondantes au modèle de référence série G(z), au
correcteur C(z), au filtre F(z) et au modèle )z(P . Le séquencement
de ces équations récurrentes n'est pas indifférent. Il faut repérer
parmi ces 4 transmittances celles qui correspondent à des systèmes
propres (même degré du numérateur et du dénominateur). En effet,
dans ce cas il y a transmission directe (gain non nul pour une
fréquence infinie). Lorsque z → ∞
z 1)z(P → Ceci implique ( ))1k(uf)k(y −= .
C(z) ,→ 1 25 Ceci implique u(k) = f(ν(k)…). ( )ρ−→ 1)z(F Ceci
implique νf(k) = f(ν(k)…)
P z m
Si toutes les transmittances étaient propres, nous aurions des
boucles algébriques et le séquencement des équations récurrentes ne
serait pas possible.
© [JM. RETIF], [2008], INSA de Lyon, tous droits réservés.
INSA GE JM RETIF Commande par modèle interne
27
Forme de l’algorithme.
<Acquisition de la consigne w(k)et de la sortie y(k)> 1.
Calcul de la sortie du modèle du processus )k(y .
)2k(y72,0)1k(y7,1)2k(u4,0)1k(u8,0)k(y −⋅−−⋅+−⋅+−⋅= . 2. Calcul de
la consigne intermédiaire.
[ ]' '1w (k) . w(k) w(k 10) w (k 1) 10
= − − + −
3. Calcul du signal d’écart )k(ν entre le processus et son modèle.
)k(y)k(y)k( −=ν 4. Calcul du signal d’écart filtré )k(fν .
)1k(f5,0)k(5,0)k(f −ν⋅+ν⋅=ν Calcul du signal d’écart )k(ε .
)k(f)k('w ν− 5. Calcul de la commande u(k).
)1k(u5,0)2k(9375,0)1k(125,2)k(25,1)k(u −⋅−−ε⋅+−ε⋅−ε⋅= 6. Gestion
des mémoires historiques. u(k-2) ← u(k-1) u(k-1) ← u(k) )1k(y)2k(y
−←− )k(y)1k(y ←− νf(k-1) ← νf(k) )8k(w)9k(w)9k(w)10k(w −←−−←−
)k(w)1k(w)1k(w)2k(w ←−−←− .
)k('w)1k('w ←− ε(k-2) ← ε(k-1) ε(k-1) ← ε(k)
6.1.4. Simulation
Nous nous placerons ici dans le cas idéal ou )z(P)z(P =
2z.72,01z.7,11
2z.4,01z.8,0 −+−−
Simulation pour une consigne en échelon.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 0
0.2
0.4
0.6
0.8
1
1.2
1.4
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 -2
-1.5
-1
-0.5
0
0.5
1
1.5
Commande )t(bU
Figure 6-2 Figure 6-3
Pour une consigne W’ en échelon, nous avons bien, aux instants
d’échantillonnage la réponse pile attendue, mais il y a une légère
oscillation avec un dépassement de 20% provenant de la présence du
zéro simplifié. L’allure de la commande est d’ailleurs bien
représentative de la présence de ce zéro.
© [JM. RETIF], [2008], INSA de Lyon, tous droits réservés.
INSA GE JM RETIF Commande par modèle interne
28 Simulation pour une consigne en rampe.
0 0.5 1 1.5 0
0.2
0.4
0.6
0.8
1
1.2
1.4
-0.05
0
0.05
0.1
0.15
Commande )t(bU
Figure 6-4 Figure 6-5
Le fait de solliciter la commande par une consigne en rampe réduit
l’amplitude de la commande dans un rapport 10. Il est clair qu’ici
les oscillations de y(t) sont tout à fait acceptables.
Rejet d’une perturbation sur la sortie.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 0.8
0.85
0.9
0.95
1
1.05
1.1
1.15
1.2
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 -0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
Figure 6-6 Figure 6-7
Pour une perturbation en échelon de 20% de la consigne, nous
retrouvons bien aux instants d’échantillonnages un rejet
k5,02,0)k(yy ⋅=ε . Entre ces instants, la sortie y(t) oscille un
peu.
6.1.5. Robustesse. Pour calculer la robustesse, il faut mettre
cette commande sous une forme adéquate faisant appel
dans la boucle de contre réaction à une transmittance )z(S )z(R .
Dans le § 4-2 nous avons montré
que les polynômes sont donnés par les équations (4-9) & (4-10)
soit : R z N z N z A zc f( ) ( ). ( ). ( )=
d fcfc z).z(B).z(N).z(N)z(A).z(D).z(D)z(S −−= .
2z455,01z0625,1625,0)z(R −⋅+−⋅−= 2z5,01z5,01)z(S −⋅−−⋅−=
INSA GE JM RETIF Commande par modèle interne
29 Ici le correcteur vaut :
−⋅+
−−
−⋅+−⋅− =
1z5,011z1
2z455,01z0625,1625,0 )z(S )z(R , nous pouvons remarquer qu’il
possède un pôle pour
z=1 (aspect intégrateur), ce qui est normal, puisque la synthèse
par modèle interne garanti une erreur statique nulle. A partir de
cette formulation, on obtient pour la robustesse de cette commande
:
75,0Myy = et ms260=τ . Ici la marge de module est très correcte.
Pour juger de la marge de retard, nous allons la comparer aux
constantes de temps du modèle du processus.
Ici
e11z.T T
e11z.9,011z.8,012z.72,01z.7,11)z(A 21
Ce qui donne pour les constantes de temps ms4481T = et ms9522T = .
Ici ms260=τ est assez faible et la présence d’un retard négligé de
cette valeur, n’est pas à écarter. Pour juger si cette commande est
acceptable, il faut en fonction de ce que l’on sait sur le
processus, savoir si un retard pur de 260 ms est physiquement
possible.
6.2. Exemple 2.
Nous allons ici reprendre le même modèle que précédemment :
2z.72,01z.7,11
2z.4,01z.8,0)z(P −+−−
6.2.1. Choix de la dynamique en asservissement.
6.2.1.1. Calcul de C(z). La dynamique le plus rapide sans
simplifier le numérateur a pour fonction de transfert :
)z(P).z(C )1(B )z(B
2z.6,01z.4167,18333,0)z(C −+−−= L'équation récurrente de commande
sera : )2k(6,0)1k(4167,1)k(8333,0)k(u −ε⋅+−ε⋅−ε⋅= Nota : Ce
correcteur est à réponse impulsionnelle finie.
6.2.1.2. Calcul du modèle de référence série G(z) Nous reprendrons
le même modèle que précédemment, pour la dynamique
d’asservissement.
Soit pour m = 10 :
)z(W )z('W)z(G
Nous allons voir comment la forme idéale en rampe est altérée dans
ce cas.
)z()z(G )z('W
INSA GE JM RETIF Commande par modèle interne
30
k 0 1 2 3 … 8 9 10 11 W(k) 1 1 1 1 … 1 1 1 1
)k('w désiré 0 0,1 0,2 0,3 … 0,8 0,9 1 1
)k('w obtenu 0 0.0667 0.1667 0.2667 … 0.7667 0.8667 0.9667
1.0000
Nous pouvons constater un écart de comportement tout à fait
acceptable.
6.2.2. Rejet des perturbations, calcul de F(z). Nous prendrons le
même filtre F(z) que dans l’exemple précédent, soit :
1z1
5,0 )z( )z(f)z(F
6.2.3. Simulation. Simulation pour une consigne en échelon.
0 0.1 0.2 0.3 0.4 0 .5 0.6 0.7 0.8 0.9 1 0
0.2
0.4
0.6
0.8
1
1.2
1.4
0 0.1 0.2 0 .3 0.4 0.5 0.6 0.7 0.8 0 .9 1 -0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Figure 6-8 Figure 6-9
Il est clair en comparant les figures 6-2 et 6-8 que le fait de
n’avoir pas simplifié le zéro négatif du processus améliore
considérablement la réponse indicielle. Simulation pour une
consigne en rampe.
0 0.5 1 1.5 0
0.2
0.4
0.6
0.8
1
1.2
1.4
-0.04
-0.02
0
0.02
0.04
0.06
0.08
0.1
Figure 6-10 Figure 6-11
La réponse est meilleure que dans l’exemple précédent et
l’amplitude de la commande est plus faible.
© [JM. RETIF], [2008], INSA de Lyon, tous droits réservés.
INSA GE JM RETIF Commande par modèle interne
31 Rejet d’une perturbation sur la sortie.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 0.8
0.85
0.9
0.95
1
1.05
1.1
1.15
1.2
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 -0 .08
-0 .06
-0 .04
-0 .02
Figure 6-12 Figure 6-13
La dynamique de la sortie est moins oscillatoire que pour l’exemple
1, bien qu’aux instants d’échantillonnage l’on n’ait pas exactement
une dynamique du premier ordre.
6.2.4. Robustesse.
2z1667,01z8333,01)z(S −⋅−−⋅−=
2z455,01z0625,1625,0 )z(S )z(R ,
Pour les marges permettant d’apprécier la robustesse on obtient :
77,0Myy = ms297=τ Ici les marges de module et de retard sont un peu
meilleures, mais nous pouvons faire la même remarque que dans
l’exemple 1 sur la faiblesse de la marge de retard.
© [JM. RETIF], [2008], INSA de Lyon, tous droits réservés.
INSA GE JM RETIF Commande par modèle interne
32
INSA 5GE JM RETIF Commande RST
33 CHAPITRE 3.
COMMANDE RST
1. INTRODUCTION.
+ +
Commande U
Perturbation Wy
YPROCESSUS discrétisé
CORRECTEUR RST
Consigne W
Mesure Y
Figure 1-1.
La commande prend la forme générale )z(Y).z(2K)z(W).z(1K)z(U −= .
Le fait de traiter indépendamment la consigne et l'entrée conduit,
dans la synthèse du correcteur, à avoir deux transmittances )z(1K
et )z(2K qui nous permettront de définir des dynamiques différentes
en régulation et en asservissement. La commande RST correspondant
au schéma bloc figure 1-2, ou R(z), S(z) et T(z) sont des
polynômes et Bm
Les différentes parties du correcteur ont pour forme :
R z r r z r z r zn n
r r( ) . . ... .= + + + +− − −
0 1 1
2 2 (1-1)
1 2 ns 1 2 nsS(z) 1 s .z s .z ... s .z− − −= + + + + (1-2)
T z t t z t z t zn n
t t( ) . . ... .= + + + +− − −
m
INSA 5GE JM RETIF Commande RST
34
z d( ) ( )
. - W'' ε
Figure 1-2.
( ) ' ( )
Y z T z B z z
A z S z B z z R z W z
A z S z A z S z B z z R z
Wy z d
Y z T z B z z Bm z
A z S z Am z B z z R z Am z W z
A z S z A z S z B z z R z
Wy d
d d( ) ( ). ( ). . ( )
− − (1-6)
Nous pouvons voir sur l'expression ci dessus qu'il apparaît deux
transferts différents, l'un pour la dynamique en asservissement et
l'autre pour la régulation. En choisissant judicieusement R(z),
S(z), T(z), Bm(z) et Am(z) il nous sera possible d'obtenir par
exemple un asservissement avec une dynamique lente sans dépassement
et un rejet de perturbation véloce avec éventuellement quelques
oscillations rapidement amorties. Etudions maintenant, à partir du
schéma bloc figure 1.2, l'expression de la commande :
U z T z S z
W z R z S z
Y z( ) ( ) ( )
. ( )= − (1-7)
Cette formulation fait bien apparaître deux correcteurs traitant
indépendamment la consigne et la sortie. Cette commande par trois
polynômes R(z), S(z) et T(z) est des plus générale, si l’on pose
R(z)=T(z) on revient à la commande classique. En effet, il est
clair que la relation devient :
( )R(z) R(z) R(z)U(z) .W '(z) .Y(z) . W '(z) Y(z) C(z). (z) S(z)
S(z) S(z)
= − = − = ε
La régulation classique devient donc un cas particulier de la
commande RST. La commande RST est cependant beaucoup plus riche
puisque nous disposons de plus de degrés de liberté dans l'équation
de commande.
1.2. Réalisation du correcteur.
La réalisation des trois polynômes RST et du modèle de référence
série B z A z
m
m
peut se faire
séparément ou conjointement. Dans le premier cas nous devrons tout
d’abord réaliser la référence intermédiaire W’ et ensuite calculer
la commande.
© [JM. RETIF], [2008], INSA de Lyon, tous droits réservés.
INSA 5GE JM RETIF Commande RST
35 1.2.1. Réalisation séparée du correcteur RST et du modèle
d’asservissement.
1.2.1.1.Modèle de référence série. W z W z
B z A z
'( ) ( )
( ) ( )
=
⇒ = + + + − − −− − − −W z bm W z bm z W z bm z W z am z W z am z W
z'( ) . ( ) . . ( ) . . ( ) ... . . ' ( ) . . ' ( ) ...0 1 1
2 2
1 1
2 2
L’équation récurrente du modèle d’asservissement sera : w k bm w k
bm w k bm w k am w k am w k'( ) . ( ) . ( ) . ( ) ... . ' ( ) . ' (
) ...= + − + − + − − − − −0 1 2 1 21 2 1 2
1.2.1.2.Correcteur RST. Les équations récurrentes du correcteur
RST, reliants Y à W', se déduiront de la relation (1-7) soit
:
1 2 1 2
U(z) s U(z) z s U(z) z
t W '(z) t W '(z) z t W '(z) z
r Y(z) r Y(z) z r Y(z) z
− −
− −
− −
+ ⋅ ⋅ + ⋅ ⋅ + = + ⋅ + ⋅ ⋅ + ⋅ ⋅ + − ⋅ − ⋅ ⋅ − ⋅ ⋅ +
0 1 2
0 1 2
1 2 3
= ⋅ + ⋅ − + ⋅ − + − ⋅ − ⋅ − − ⋅ − − − ⋅ − − ⋅ − − ⋅ − −
(1-8)
Nous voyons dans cette équation récurrente que si les coefficients
ri et ti sont égaux nous retrouvons une commande classique ou le
correcteur reçoit le signal d'écart consigne-mesure.
1.2.2. Réalisation conjointe du correcteur RST et du modèle
d’asservissement. A partir de la relation (1-7) on peut écrire
:
U z T z Bm z S z Am z
W z R z S z
Y z B z A z
W z R z S z
Y zr
. ( )= − = − = −U z U z1 2( ) ( ) (1-9)
Nous avons ici un correcteur multivariable à deux entrées une
sortie, il est possible de le réaliser par des équations d’état
discrète ou par deux transferts en z. C’est cette dernière solution
que nous retiendrons. En considérant la commande comme la somme de
deux grandeurs U1 et U2 les équations récurrentes de commande
seront : u k br w k br w k br w k ar u k ar u k1 0 1 2 1 1 2 11 2 1
2( ) . ( ) . ( ) . ( ) ... . ( ) . ( ) ....= + − + − + − − − − − u
k r y k r y k r y k s u k s u k2 0 1 2 1 2 2 21 2 1 2( ) . ( ) . (
) . ( ) ... . ( ) . ( ) ....= + − + − + − − − − − u k u k u k( ) (
) ( )= −1 2
1.3. Représentation discrète du processus. Préalablement à toute
commande, il est nécessaire d'identifier le processus par une
méthode d'identification paramétrique (moindre carré généralisé,
simplex, gradient etc…). On mettra le processus sous la forme
:
H z B z A z
z d( ) ( ) ( )
.= −
(1-10) avec d représentant le retard en nombre de périodes
d'échantillonnage.
b
a
nzmb2z2b1z1b)z(B
nzna2z2a1z1a1)z(A −⋅++−⋅+−⋅=
−⋅++−⋅+−⋅+= (1-11)
INSA 5GE JM RETIF Commande RST
36 Nous noterons que le numérateur B(z) a un coefficient b0 nul ce
qui implique que sa réponse indicielle vaut zéro à l’instant
initial. La plupart du temps un modèle du premier ordre ou du
second ordre éventuellement retardé est suffisant pour représenter
un processus. Nous les formulerons :
Pour le 1er ordre retardé H z b z
a z z d( )
(1-12)
Pour le 2e ordre retardé H z b z b z
a z a z z d( )
. .
. . .=
+
+ +
− −
1.4. Idées directrices pour la synthèse d'un correcteur RST.
1.4.1. Dynamique en asservissement. En asservissement la
perturbation Wy est nulle en variation et le schéma de commande
correspond à la figure 1.3. Pour fixer la dynamique en
asservissement il faudra essayer d'obtenir, par un calcul adéquat
des
( ) ' ( )
le plus véloce possible. Si ceci est réalisé les
signaux Y et W' seront proches et la dynamique sera principalement
déterminée par le modèle de
référence série B z A z
m
m
( )
( )
W W' Transfert le plus rapide possible entre Y et W'
Y
Figure 1-3.
1.4.2. Dynamique en régulation. Ici nous considérerons que le
processus a atteint son régime d'équilibre, c'est à dire que la
sortie a rejoint la valeur de la consigne. Celle ci est donc nulle
en variation et le schéma bloc de la commande est conforme à la
figure 1.4. La dynamique en régulation (W'=0) donnée par la
relation (1-6) ou déterminée à partir du schéma bloc donne : Y
z
Wy z A z S z
A z S z B z z R zd ( ) ( )
( ). ( ) ( ). ( ) ( ). . ( )
= + −
(1-14)
En calculant avec pertinences les polynômes R(z) et S(z) il est
possible de définir une dynamique de rejet de la perturbation
Wy.
© [JM. RETIF], [2008], INSA de Lyon, tous droits réservés.
INSA 5GE JM RETIF Commande RST
37
z -d
Figure 1-4.
Pour une perturbation constante, il faut que la fonction de
transfert Y z
W zy
ait un gain statique
nul, cela implique que le produit A(z).S(z) possède un zéro pour
z=1 c'est à dire que le correcteur doit être intégrateur. Pour
faire la synthèse d'une commande RST nous allons utiliser deux
approches tendant à maîtriser indépendamment la dynamique en
régulation (réaction à une perturbation) et la réponse en
asservissement (changement de consigne). Nous allons, avant de
détailler le calcul du correcteur RST, voir quelles sont les
différentes approches de synthèse.
2. COMMANDE POUR UN PROCESSUS A ZEROS INSTABLES. Aucune hypothèse a
priori n'est faite sur le processus. Il peut posséder des zéros ou
des pôles instables (racines de A(z) ou de B(z) en dehors du cercle
unité).
2.1. Dynamique en asservissement. Cherchons tout d’abord à définir
une réponse rapide entre Y et W’, sachant qu’il n’est pas possible
de simplifier le numérateur du processus, on mettra ce transfert
sous la forme : Y z
W z B z T z
P z z d( )
( ) .= − (2-1)
( ) ' ( )
( ) ( ) ( )
W z B z B
z d( ) ' ( )
.= − 1
(2-3)
Nous pouvons noter, que cette transmittance ne possède pas de
termes en z au dénominateur, c’est donc un filtre à réponse
impulsionnelle finie. La maîtrise de la dynamique en
asservissement sera assurée par le modèle de référence série B z A
z
m
m
T(z).
INSA 5GE JM RETIF Commande RST
38
A z S z B z z R z
d
d ( ).
Figure 2-1.
Dans ce type de commande il n'y aura pas une correspondance exacte
en asservissement entre la trajectoire souhaitée W' et la sortie Y
car à aucun moment nous n'avons cherché à éliminer le numérateur de
la transmittance B(z). Si l'on cherche à le supprimer (voir méthode
suivante) les hypothèses sur le processus seront plus restrictives,
car dans ce cas B(z) devra avoir des zéros stables.
2.2. Dynamique en régulation.
( ) ( )
Y z Wy z
( ) ( )
( ). ( ) ( ). ( ) ( ). . ( )
= + −
Afin de déterminer le comportement en régulation nous fixerons les
pôles de cette fonction de transfert tel que P z A z S z B z z R
zd( ) ( ). ( ) ( ). . ( )= + − (2-4) Cette équation polynomiale
possède une solution unique qui permet de déterminer les polynômes
R z et S z( ) ( ) .
La dynamique en régulation sera régie par : Y z
Wy z A z S z
P z ( ) ( )
= (2-5)
Remarque.
Comme nous pourrons le montrer ultérieurement des valeurs
particulières des racines de R(z) et S(z) conduisent à des
propriétés spécifiques de filtrage sur les perturbations. Afin de
fixer a priori des conditions de rejets de perturbations pour des
fréquences bien déterminées il est nécessaire de fixer une partie
de R(z) et de S(z). Dans ce cas nous poserons : S z S z S z et R z
R z R zp p( ) ( ). ( ) ( ) ( ). .( )= =1 1 S z et R zp p( ) ( )
représentant les parties dites précaractérisées des polynômes S z
et R z( ) ( ) .
© [JM. RETIF], [2008], INSA de Lyon, tous droits réservés.
INSA 5GE JM RETIF Commande RST
39 Résolution de l'équation de Bezout.
Dans le cas où nous avons des parties précaractérisées sur les
polynômes S z et R z( ) ( ) l'équation
(2-4) devient : P z A z S z S z B z z R z R zp d
p( ) ( ). ( ). ( ) ( ). . ( ). .( )= + − 1 1
Cette équation pouvant se mettre sous la forme générale :
P z C z D z E z F z z d( ) ( ). ( ) ( ). ( ).= + − (2-6)
avec C z A z S z D z S z E z B z R z F z R z
p p
1 1
(2- 7)
La connaissance de P(z), C(z) et E(z) assurant alors le calcul de
D(z) et F(z) qui permettent
ensuite d'obtenir les polynômes de régulation : S z D z S z R z F z
R z
p p
( ) ( ). ( ) ( ) ( ). ( )
= =
( ) ( ) ( )
n P z n n d n D z n d
n F z n
f c
1 1
1 (2-8)
avec n et nc e les degrés respectifs de C(z) et E(z) La résolution
pratique de l'égalité de Bezout (2-6) revient à résoudre l'équation
matricielle P M X= ⋅ (2-9) avec X vecteur contenant les
coefficients des polynômes D(z) et F(z)
[ ]X d d d d f f f fT n nd f= 1 1 2 3 0 1 2, , , ,..., , , , , ...,
(2-10)
P vecteur des coefficients du polynôme P(z) fixant le
fonctionnement en régulation
P p p p pT np
= 1 1 2 3, , , , ... , (2-11)
On obtient alors D(z) et F(z) en résolvant l’identité de Bezout
(2-9 )soit : X = M–1.P. (2-12)
Une fois calculé D(z) et F(z) qui représentent ici respectivement S
z et R z1 1( ) ( ) les polynômes
recherchés sont donné par
S z S z S z R z R z R z
T(z P z B
1
(2-13)
2.3. Mise en œuvre de la méthode. La connaissance du cahier des
charges, concernant les contraintes en asservissement et en
( ) ( )
. Il faudra tenir le plus
grand compte de la dynamique en boucle ouverte et de la saturation
des actionneurs pour la définition de la commande. La résolution de
l’équation de Bezout fournie les polynômes S(z) et R(z) dont on ne
maîtrise pas les racines. Il est possible, compte tenu des
connaissances que l’on a a priori, sur les perturbations de sortie
et/ou le bruit de mesure, d’être amené à précaractériser des
racines dans les polynômes S(z) ou R(z).
© [JM. RETIF], [2008], INSA de Lyon, tous droits réservés.
INSA 5GE JM RETIF Commande RST
40 2.3.1. Précaractérisation de S(z).
Comme nous l’avons déjà défini, le transfert en régulation vaut : Y
z
Wy z A z S z
A z S z B z z R zd ( ) ( )
( ). ( ) ( ). ( ) ( ). . ( )
= + −
Pour un processus non intégrateur si on désire assurer une erreur
statique nulle pour une perturbation de sortie constante, le
polynôme S(z) doit posséder une racine pour z = 1. Il faut donc
imposer cette contrainte lors de la synthèse de S(z), pour cela on
pose :
( )S z z S z( ) . ( )= − −1 1 1 (2- 14)
Le transfert en régulation devient :
Y z Wy z
A z S z B z z R zd ( ) ( )
( ). ( ). ( )
( ). ( ) ( ). . ( ) =
−
+
−
( ). ( ). ( ) ( )
1 1 1 (2-15)
Nous pouvons généraliser cette approche, en précaractérisant un
polynôme S zp ( ) afin d’avoir des propriétés particulières de
rejet de la perturbation pour certaines fréquences. Avec S z S z S
zp( ) ( ). ( )= 1 (2-16)
La fonction de transfert définissant le rejet de perturbation vaut:
Y z
Wy z A z S z S z
A z S z B z z R z p
d ( ) ( )
P z p( ). . ( ) ( )
1 (2-17)
2.3.2. Précaractérisation de R(z). Nous verrons plus avant dans ce
chapitre que le transfert reliant la sortie Y à un bruit de mesure
est le suivant :
Y z W z
B z z R z A z S z B z z R zb
d
d ( ) ( )
P z
d( ). . ( ) ( )
Si nous fixons des racines à R(z) telle que pour une pulsation ω0,
R(j.ω0)=0, une perturbation sinusoïdale à cette pulsation sera
totalement éliminée. Comme précédemment nous poserons donc : R z R
z R zp( ) ( ). ( )= 1 (2-18)
Ce qui amène pour le rejet d’une erreur de mesure :
Y z W z
A z S z B z z R zb
d p
− 1
(2-19)
2.3.3. Choix de P(z). Le choix de P(z) fixe les pôles du transfert
en régulation. L’influence de ceux-ci est prédominante dans la
dynamique du rejet de la perturbation. Généralement le degré de
P(z) est suffisant pour fixer des pôles principaux donnant la
dynamique et des pôles auxiliaires pouvant
assurer un contrôle de certains zéros de Y z
W zy
poserons donc : P z P z P zp a( ) ( ). ( )= (2-20)
P zp ( ) représentant les pôles principaux et P za ( ) les pôles
auxiliaires. Pour éliminer des zéros dans le transfert en
régulation (1-14), si le processus est stable il est
possible de prendre P z A za ( ) ( )= , le transfert en régulation
devient : Y z
Wy z S z P zp
( ) ( )
( ) ( )
=
INSA 5GE JM RETIF Commande RST
41 3. COMMANDE POUR UN PROCESSUS A ZEROS STABLES. Nous
considérerons que les zéros du modèle du processus sont à
l’intérieur du cercle unité, cet avantage nous permettra de
simplifier B(z). Cette contrainte est parfois restrictive car
contrairement aux systèmes continus, les processus discrets ont
souvent des zéros instables.
3.1. Dynamique en asservissement Reprenons le schéma de commande de
la figure1.2 dans lequel nous avons explicité le transfert entre Y
et W’’.
T z( ) B z
d
d ( ).
d- -1. )
Figure 3-1.
Nous allons ici rechercher un comportement à réponse prototype
minimale entre la sortie Y et la consigne W’. Pour un processus
retardé, le transfert le plus véloce sera donc une réponse pile
retardée conformément à la figure 3.1. En effet, pour un processus
retardé, on ne peut pas obtenir une réponse en asservissement avec
un retard inférieur au retard du processus. A partir du schéma de
commande nous pouvons déduire de la relation (1-5) la fonction de
transfert entre Y et W’ soit :
avec Y z
A z S z z B z R z
d
d ( ) ' ( )
Pour satisfaire à l'objectif de poursuite nous poserons : ( )Y
z
W z T z z
P(z
d( ) ' ( )
= ⋅ − +1
(3-2)
où P(z) fixe comme précédemment la dynamique des rejets de
perturbations, il suffira alors de choisir T(z) = P(z) et nous
obtiendrons un comportement à réponse pile retardée.
( )Y z W z
z d( ) ' ( )
= − +1 (3-3)
Cette égalité étant fixée, la dynamique de la sortie Y sera à un
décalage près celle fixé par le
modèle de référence série Bm z Am z
( ) ( )
.
Afin de ne pas introduire un délai supplémentaire sur la sortie Y,
on veillera à ce que la réponse indicielle du modèle de référence
série soit différente de zéro au temps initial. Pour satisfaire à
cette remarque il suffit que le coefficient bm0 soit différent de
zéro. Pour satisfaire à ce type de fonctionnement, les relations
(3-1) et (3-2) donnent pour le transfert entre Y et W’’
© [JM. RETIF], [2008], INSA de Lyon, tous droits réservés.
INSA 5GE JM RETIF Commande RST
42 Y
W B z z
A z S z B z z R z z z
P z
− −1 (3-4)
Le polynôme fixant le rejet des perturbations aura alors pour
expression :
P(z A z S z z
B z z z R zd) ( )
( ) ( )
( )= ⋅ ⋅
+ ⋅ ⋅ −
B z '( )
= −1
(3-6)
Pour déterminer R(z) et S(z) il faudra alors résoudre l'égalité (
)P(z A z S z R z z d) ( ) ' ( ) ( )= ⋅ + ⋅ − +1 (3-7)
soit S z S z B z
z ( )
( ). ( )' = −1 (3-8)
3.2. Dynamique en régulation. Nous rappelons que le transfert en
r&