FONCTIONS DE PLUSIEURS VARIABLES(Outils Mathématiques 4)
Bernard Le StumUniversité de Rennes 1
Version du 13 mars 2009
Table des matières
1 Fonctions partielles, courbes de niveau 1
2 Limites et continuité 5
3 Différentiabilité 8
4 Fonctions implicites 19
5 Développements limités 21
1 Fonctions partielles, courbes de niveau
Exemple 1.1 i) Volume d’un cylindre.
[DESSIN]
Une fois fixées des unités (mètre et mètre cube par exemple), lorsque le rayonr et la longueur h d’un cylindre varient dans R>0, le volume V = πr2h ducylindre varie dans R>0. On dit V est fonction des deux variables r et h. Ondispose donc d’une fonction réelle
R2 // R(r, h) � // V (r, h) = πr2h
de deux variables réelles. Cette fonction est définie sur son domaine
D := {(r, h) ∈ R2, r, h > 0}
1

2 B04 – Version du March 13, 2009
et son image est R>0. Choisissons deux valeurs r0 et h0. Si on fixe le rayonr = r0, alors on peut considérer la fonction partielle
R // Rh
� // V (r0, h) = (πr20)× h
(qui est linéaire).
[DESSIN]
De même, si on fixe la longueur h = h0, on peut considérer l’autre fonctionpartielle
R // Rr � // V (r, h0) = (πh0)× r2
(qui est cette fois quadratique).
[DESSIN]
Lorsqu’on donne différentes valeurs Vi à V , on obtient ce qu’on appelle lescourbes de niveau d’équations πr2h = Vi :
[DESSIN]
Enfin, le graphe de V est la surface de R3 d’équation V = πr2h, c’est à direl’ensemble des points de la forme (r, h, πr2h) avec r, h > 0.
[DESSIN]
ii) Température en un point d’une pièce à un moment donné.
[DESSIN]
Dans une pièce de longueur L, largeur l et hauteur h, on peut mesurer pendantune période donnée (disons, une heure) la température en un point donné à unmoment donné. Si on fixe des unités (mètre et seconde par exemple), le coinen bas à gauche comme origine de la pièce et le moment de la première mesurecomme origine du temps, la température T est fonction des coordonnées x, y, zdu point et du moment t ou la température est prise. En d’autres termes, Test fonction de x, y, z, t. On a définit donc une fonction réelle
R4 T // R(x, y, z, t) � // T (x, y, z, t)
de quatre variables réelles. Quel est le domaine de définition de cette fonction ?
Définition 1.2 On rappelle que R2 désigne l’ensemble de tous les couples (x, y)avec x ∈ R et y ∈ R. Une partie de R2 est un ensemble de couples de réels.
Exemple 1.3 i) Le quadrant droit du plan.
[DESSIN]

B04 – Version du March 13, 2009 3
Il peut être décrit comme
Q = {(x, y) ∈ R2, x, y ≥ 0}
ou encore comme Q = R>0 ×R>0.ii) Le cercle unité.
[DESSIN]
Il peut être décrit comme
C = {(x, y) ∈ R2, x2 + y2 = 1}
(en compréhension : condition) mais aussi comme l’ensemble
C = {(cos θ, sin θ), θ ∈ R}
(en extension : paramétrisation).
Définition 1.4 Une fonction réelle de deux variables réelles est une méthode quiassocie à certains couples de réels (x, y), un autre réel f(x, y). On écrit
R2 f // R(x, y) � // f(x, y)
Son domaine de définition est la partie Df de R2 formée des couples (x, y) pourlesquels f(x, y) existe. L’ image (du domaine) de f est l’ensemble de toutes les valeursque f(x, y) peut prendre.
Exemple 1.5 La fonction f(x, y) = xy − 52√y − x2 est définie lorsque le point de coor-
données (x, y) est situé au dessus de la parabole y > x2.
[DESSIN]
On peut montrer que son image est R tout entier.
Définition 1.6 Étant donne une fonction f : R2 → R et un point (a, b) de R2, lesfonctions partielles sont les fonctions d’une variable réelle obtenue en fixant y = b,
R // Rx � // fx(x, b) = f(x, b)
ou en fixant x = a,R // Ry � // fy(a, y) = f(a, y).

4 B04 – Version du March 13, 2009
Définition 1.7 (Généralisation) On désigne par Rn l’ensemble de tous les n-uples (x1, . . . , xn) avec x1, . . . , xn ∈ R. Alternativement, on verra les éléments deRn comme des vecteurs u = (x1, . . . , xn) ou des points P = (x1, . . . , xn). La cor-respondance étant donnée par u = −→OP . Une partie de Rn est tout simplement unensemble de n-uples de réels.Une fonction réelle de n variables réelles est une méthode qui associe à certainsn-uples (x1, . . . , xn), un autre réel f(x1, . . . , xn). On écrit
Rnf // R
(x1, . . . , xn) � // f(x1, . . . , xn)
Son domaine de définition est la partie Df de Rn formée des points P pour lesquelsf(P ) existe. L’ image (du domaine) de f est l’ensemble de toutes les valeurs quef(P ) peut prendre.Enfin, les fonctions partielles en un point (a1, . . . , an) sont les fonctions d’une va-riable réelle obtenue en faisant varier seulement xi :
Rnf // R
x � // fxi(a1, . . . , ai−1, x, ai+1, . . . an) = f(a1, . . . , ai−1, x, ai+1, . . . an)
Exemple 1.8 La fonction f(x, y) = xyez√x2 + y2 + z2 − 1
es définie lorsque le point
de coordonnées (x, y, z)est situé en dehors de la sphère unité x2 + y2 + z2 ≤ 1. Onpeut voir que son image est encore R tout entier.
Définition 1.9 Le graphe d’une fonction f : R2 → R est la « surface » G(f) ⊂ R3
formée de tous les triplets de la forme (x, y, f(x, y)) avec (x, y) ∈ Df .
Exemple 1.10 Par exemple, si f(x, y) = xy − 52√y − x2 , alors
G(f) = {(x, y, xy − 52√y − x2 ), y > x2}.
Définition 1.11 (Généralisation) Le graphe d’une fonction f : Rn → R est
G(f) = {(P, f(P )), P ∈ Df} ⊂ Rn+1.
Définition 1.12 Les courbes de niveau d’une fonction f : R2 → R sont les courbesplanes d’étquation f(x, y) = k avec k fixé.
Une courbe de niveau d’une fonction f est donc la même chose qu’une courbe deniveau de son graphe G(f).
Exemple 1.13 La fonction f(x, y) = y2 − x2.

B04 – Version du March 13, 2009 5
[DESSIN]
Définition 1.14 Les courbes de niveau d’une surface S dans R3 sont les courbesobtenues en coupant S avec un plan d’équation z = k et en projetant sur le planxOy.
[DESSIN]
Proposition 1.15 Une courbe de niveau d’une fonction f est la même chose qu’unecourbe de niveau de son graphe G(f).
[Démonstration]
Définition 1.16 Si f est une pression, on dit courbe isobare. Si f est une tempé-rature, on dit courbe isotherme. Si f est un potentiel, on dit courbe equipotentielleSi f est une altitude, on dit courbe isoplèthe. etc.
2 Limites et continuité
Définition 2.1 Soit f : R2 → R une fonction réelle de deux variables réelles, (a, b)un point de R2 et l ∈ R. Alors, f(x, y) a pour limite l quand (x, y) tend vers (a, b)si pour tout intervalle ouvert I contenant l, il existe un disque ouvert D contenant(a, b) tel que l’image de D \ (a, b) par f est contenu dans I.
[DESSIN]
Autrement dit,
∀ε > 0, ∃η > 0,∀(x, y) 6= (a, b),√
(x− a)2 + (y − b)2 ≤ η ⇒ |f(x, y)− l| ≤ ε
On écrira
lim(a,b)
f(x, y) = l ou lim(x,y)→(a,b)
f = l.
Définition 2.2 Les coordonnées polaires de (x, y) en (a, b) sont données par{x = a+ ρ cos θy = b+ ρ sin θ
avec ρ =√
(x− a)2 + (y − b)2 et θ ∈ [0, 2π[.
Proposition 2.3 (Méthode des majorations) On a lim(a,b)
f(x, y) = l si et seule-ment si il existe F : R≥0 → R tel que |f(x, y)− l| ≤ F (ρ) et limρ→0F (ρ) = 0.

6 B04 – Version du March 13, 2009
[Démonstration]
Exemple 2.4 On a lim(0,0)
x2y2
x2 + y2 = 0 : en effet,
x2y2
x2 + y2 = ρ2
4 sin2 2θ ≤ ρ2
4 → 0 quand ρ→ 0.
Proposition 2.5 (Méthode des chemins) S’il existe deux « chemins continus »α, β : R → R2 tels que α(0) = β(0) = (a, b) et lim0(f ◦α) 6= lim0(f ◦ β), alors f n’apas de limite en (a, b).
[Démonstration]
Exemple 2.6x2y2
x4 + y4 n’a pas de limite en (0, 0) : il suffit de choisir α(t) = (t, 0)
et β(t) = (t, t). On trouve d’un coté 0 et de l’autre 12 .
Définition 2.7 Une fonction f : R2 → R est continue en (a, b) ∈ R2 si f(a, b) =lim(a,b)
f(x, y). La fonction f est continue si f est continue en tout point de Df .
Exemple 2.8 i) La fonction
f(x, y) =
x2y2
x2 + y2 si (x, y) 6= (0, 0)0 sinon
est continue en (0, 0).ii) la fonction
f(x, y) =
x2y2
x4 + y4 si (x, y) 6= (0, 0)0 sinon
n’est pas continue en (0, 0).
Proposition 2.9 Soit f : R2 → R une fonction continue (sur son domaine) et(a, b) 6∈ Df . Alors l = lim
(a,b)f(x, y) existe si et seulement si f se prolonge par continuité
en (a, b) et on a alors f(a, b) = l.
[Démonstration]
Exemple 2.10 Soit f : R2 → R une fonction réelle de deux variables réelles.
i) f(x, y) = x2y2
x2 + y2 se prolonge par continuité sur R2 en posant f(0, 0) = 0.

B04 – Version du March 13, 2009 7
ii) f(x, y) = x2y2
x4 + y4 ne peut pas se prolonger par continuité.
Proposition 2.11 Si f et g sont continues en (a, b), alors f + g, fg et fgaussi (si
g(a, b) 6= 0 dans le dernier cas).
[Démonstration]
Corollaire 2.12 Toute fonction rationnelle est continue (sur son domaine de défi-nition).
Exemple 2.13x2y2
x2 + y2 et x2y2
x2 + y4 sont bien continues sur leur domaine.
Proposition 2.14 i) Si α : R → R2 est continue en t et f est continue en(a, b) = α(t), alors f ◦ α est continue en t.
ii) Si f est continue en (a, b) et h : R → R est continue en f(a, b), alors h ◦ fest continue en (a, b).
[Démonstration]
Exemple 2.15 On sait que la fonction
f(x, y) = x2y2
x2 + y2
se prolonge par continuité sur R2 en posant f(0, 0) = 0 et la fonction sin est continuesur R. Il suit que la fonction
g(x, y) = sin( x2y2
x2 + y2 )
« est » continue sur R2.
Définition 2.16 (Généralisation) Soit f : Rn → R une fonction de n variablesréelles, P0 ∈ Rn et l ∈ R. Alors, f(P ) a pour limite l quand P tend vers P0 si pourtout intervalle ouvert I contenant l, il existe une boule ouverte B contenant P0 telque l’image de B \ P0 par f est contenu dans I.On écrira
limP0f(P ) = l ou lim
P→P0f = l.
Si u = (x1, . . . , xn) ∈ Rn, la norme de u est ‖u‖ =√x2
1 + · · ·+ x2n. Si P =
(x1, . . . , xn) ∈ Rn et Q = (y1, . . . , yn) ∈ Rn, la distance de P à Q est
d(P,Q) = ‖−→PQ‖ =√
(y1 − x1)2 + · · ·+ (yn − xn)2.

8 B04 – Version du March 13, 2009
On voit alors que limP→P0
f = l si et seulement si
∀ε > 0,∃η > 0,∀P 6= P0, d(P0, P ) ≤ η ⇒ |f(x, y)− l| < ε.
La fonction f est continue en P0 si f(P0) = l.
Proposition 2.17 Ces notions sont stables par somme, produit et quotient.
Définition 2.18 (Généralisation) Une fonction vectorielle f : Rm → Rn est uneméthode qui associe à certains vecteurs (ou points) de Rm, un vecteur (ou point)de Rn. Si on écrit f(P ) = (f1(P ), . . . , fn(P )), on dit que les fonctions vectoriellesf1, . . . , fn : Rm → R sont les composantes de f .
Exemple 2.19 L’application qui à un point du cercle associe son vecteur tangentorienté normalisé est une fonction vectorielle.
[DESSIN]
C’est tout simplement l’application (x, y) 7→ (−y, x) restreinte au cercle unité. Sescomposantes sont les fonctions (x, y) 7→ −y et (x, y) 7→ x.
Définition 2.20 Une fonction vectorielle est continue (en un point) si et seulementsi toutes ses composantes sont continues (en ce point).
Exemple 2.21 f(x, y) = (xy, (x2 + y2)exy, x sin(x+ y3)) est continue partout.
Proposition 2.22 f est continue en P0 si et seulement si
∀ε > 0, ∃η > 0,∀P ∈ Df , d(P0, P ) ≤ η ⇒ d(f(P0), f(P )) < ε.
[Démonstration]
Proposition 2.23 (Généralisation) La continuité est stable par composition.
3 Différentiabilité
Définition 3.1 Si f : R2 → R, les dérivées partielles de f en (a, b) ∈ R2 sont lesdérivées des fonctions partielles (si elles existent) :
∂f
∂x(a, b) := f ′x(a, b) = lim
h→0
f(a+ h, b)− f(a, b)h
et∂f
∂x(a, b) := f ′y(a, b) = lim
h→0
f(a, b+ h)− f(a, b)h
.
Le gradient de f en (a, b) est alors le vecteur
∇f(a, b) = (∂f∂x
(a, b), ∂f∂y
(a, b))

B04 – Version du March 13, 2009 9
Exemple 3.2 Si
f(x, y) =
x2y2
x2 + y2 si (x, y) 6= (0, 0)0 sinon
on a fx(x, 0) = f(x, 0) = 0 et donc ∂f∂x
(0, 0) = f ′x(0, 0) = 0. Symétriquement,∂f∂y
(0, 0) = 0 et on a donc ∇f(0, 0) = (0, 0).
Calculons ∂f∂x
(1, 1). On a fx(x, 1) = f(x, 1) = x2
x2+1 et donc f ′x(x, 1) = 2x(x2+1)−2x(x2)(x2+1)2
si bien que ∂f∂x
(1, 1) = f ′x(1, 1) = 4−24 = 1
2 .
En général, on écrira aussi∂f
∂x(x, y) = lim
∆x→0
f(x+ ∆x, y)− f(x, y)∆x et ∂f
∂y(x, y) = lim
∆y→0
f(x, y + ∆y)− f(x, y)∆y .
si bien que ∇f = (∂f∂x,∂f
∂y).
Exemple 3.3 Calculons ∇f lorsquei)
f(x, y) =
x2y2
x2 + y2 si (x, y) 6= (0, 0)0 sinon
On a déjà vu que ∇f(0, 0) = (0, 0).Pour calculer ∂f
∂x, on considère y comme constant et on dérive par rapport à
x. Pour (x, y) 6= (0, 0), on a donc
∂f
∂x(x, y) = 2x(x2y2)− 2xy2(x2 + y2)
(x2 + y2)2 = −2xy4
(x2 + y2)2
et par symétrie, on aura donc
∇f(x, y) = ( −2xy4
(x2 + y2)2 ,−2x4y
(x2 + y2)2 ).
ii)
f(x, y) =
xy
x2 + y2 si (x, y) 6= (0, 0)0 sinon
On voit facilement que
∇f(x, y) ={
(y(x2−y2)(x2+y2)2 ,
x(y2−x2)(x2+y2)2 ) si (x, y) 6= (0, 0)
(0, 0) sinon
Pour le second cas, c’est clair et pour le premier cas, il suffit par symétrie decalculer
∂f
∂x(x, y) = 2x(xy)− y(x2 + y2)
(x2 + y2)2 = y(x2 − y2)(x2 + y2)2 .
On voit donc que ∇f existe tout le temps mais pourtant, f n’est pas continueen 0 !

10 B04 – Version du March 13, 2009
Définition 3.4 Étant donné une fonction f : R2 → R, un point P := (a, b) et unvecteur v = (α, β), la dérivée de direction v en P de f est la dérivée en P de lafonction directionnelle t 7→ f(a+ tα, b+ tβ) :
f ′(α,β)(a, b) = limt→0
f(a+ tα, b+ tβ)− f(a, b)t
.
On a en particulier f ′x = f(1,0) et f ′y = f ′(0,1).
Exemple 3.5 La fonction de direction (1, 1) en (0, 0) associée à
f(x, y) =
x2y2
x2 + y2 si (x, y) 6= (0, 0)0 sinon
est t 7→ t2
2 et sa dérivée est donc la fonction identique t 7→ t. On voit donc quef ′(1,1)(0, 0) = 0.
Définition 3.6 Le produit scalaire de deux vecteurs de (α, β) et (h, k) de R2 est
(α, β) · (h, k) = αh+ βk.
Définition 3.7 Une fonction f := R2 → R est différentiable en (a, b) si elle admetdes dérivées partielles en (a, b) et qu’en plus,
lim(x,y)→(a,b)
f(x, y)− f(a, b)− ∂f∂x
(a, b)(x− a)− ∂f∂y
(a, b)(y − b)√h2 + k2
= 0.
La fonction f est différentiable si f est différentiable en tout point de Df .
Exemple 3.8 La fonction
f(x, y) =
x2y2
x2 + y2 si (x, y) 6= (0, 0)0 sinon
est différentiable en (0, 0) :En effet, on a
ε(x, y) = f(x, y)− f(0, 0)−∇f(0, 0) · (x, y)√x2 + y2
= x2y2
(x2 + y2)√x2 + y2 ≤
x2y2
y2√x2 + y2 = x2
√x2 + y2 ≤
x2
|x|= |x|
et bien sûr, |x| → 0 quand ρ→ 0 (car |x| < ρ).

B04 – Version du March 13, 2009 11
Rappelons que le produit scalaire de deux vecteurs de (α, β) et (h, k) de R2 est
(α, β) · (h, k) = αh+ βk.
Si on pose ∆P = (x − a, y − b) et ∆f(P ) = f(x, y) − f(a, b), la condition dedifférentiabilité en (x, y) se réécrit :
∆f(P ) = ∇f(P0) ·∆P + o(∆P ).
Théorème 3.9 Si f : R2 → R est différentiable en (a, b), alors f est continue en(a, b).
[Démonstration]
Définition 3.10 Une fonction f : R2 → R est de classe C1 si ses dérivées partiellesexistent et sont continues (sur son domaine de définition).
Exemple 3.11 Avec
f(x, y) =
x2y2
x2 + y2 si (x, y) 6= (0, 0)0 sinon
on calcule pour (x, y) 6= (0, 0),
| ∂∂x
(x, y)− ∂
∂x(0, 0)| = | 2xy4
(x2 + y2)2 − 0| ≤ |2xy4
y4 | = 2|x| → 0.
On voit dont que ∂∂x
est continue et il en va de même de ∂∂y
par symétrie. Notrefonction est donc de classe C1.
Théorème 3.12 Si f est de classe C1, alors f est différentiable.
[Démonstration]
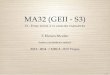
Exemple 3.13 i) La fonction f(x, y) = x3y
x4 + y2 prolongée par 0 à l’origine estcontinue, possède des dérivées partielles mais n’est pas différentiable (et doncpas de classe C1). On vérifiera ça plus tard.
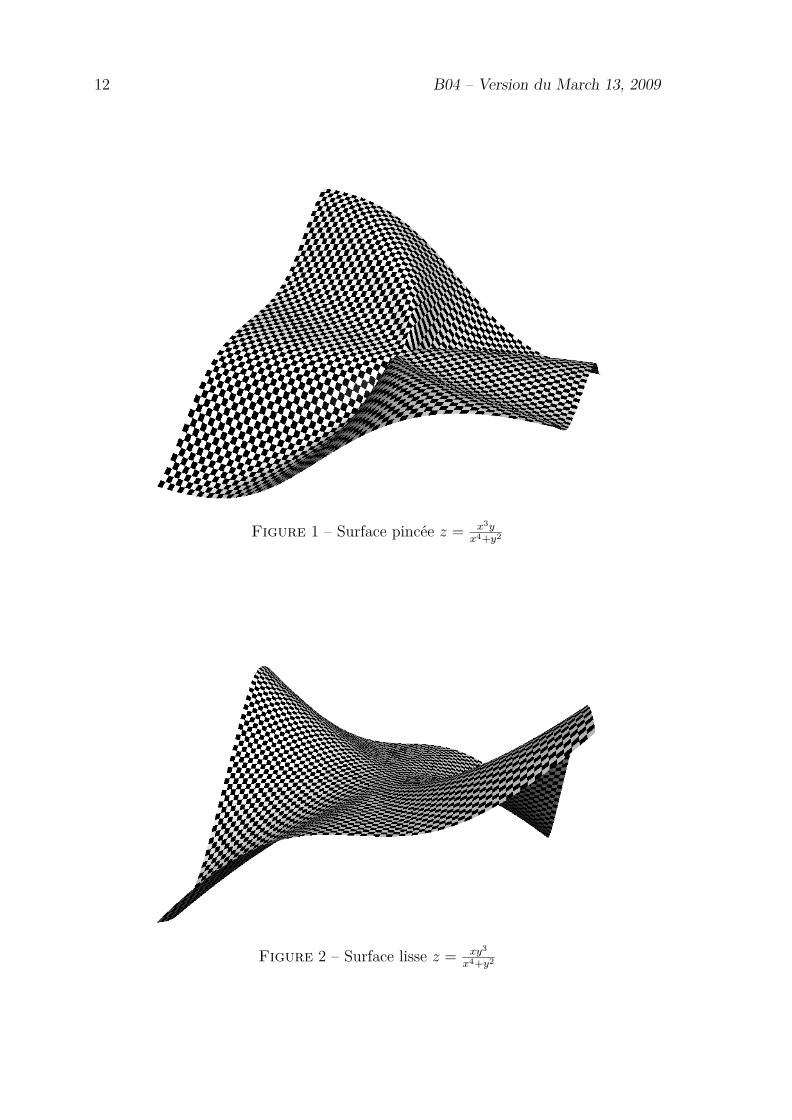
ii) La fonction f(x, y) = xy3
x4 + y2 prolongée par 0 à l’origine est de classe C1
(exercice). Elle est donc différenciable et en particulier continue.
Proposition 3.14 Si f : R2 → R et g : R2 → R sont différentiables en(a, b), alors
f + g est différentiable en (a, b) et on a∂(f+g)∂x
(a, b) = ∂f∂x
(a, b) + ∂g∂x
(a, b)
∂(f+g)∂y
(a, b) = ∂f∂y
(a, b) + ∂g∂y
(a, b)
12 B04 – Version du March 13, 2009
Figure 1 – Surface pincée z = x3yx4+y2
Figure 2 – Surface lisse z = xy3
x4+y2

B04 – Version du March 13, 2009 13
i)ii) fg est différentiable en (a, b) et∂(fg)∂x
(a, b) = g(a, b)∂f∂x
(a, b) + f(a, b) ∂g∂x
(a, b)
∂(fg)∂y
(a, b) = g(a, b)∂f∂y
(a, b) + f(a, b)∂g∂y
(a, b)
iii) Si g(a, b) 6= 0, alors fgest différentiable en (a, b) et
∂( fg
)∂x
(a, b) = 1g(a,b)2 [g(a, b)∂f
∂x(a, b)− f(a, b) ∂g
∂x(a, b)]
∂( fg
)∂y
(a, b) = 1g(a,b)2 [g(a, b)∂f
∂y(a, b)− f(a, b)∂g
∂y(a, b)]
[Démonstration]
Corollaire 3.15 Si f et g sont de classe C1 alors f + g, fg et fgaussi.
Corollaire 3.16 Une fonction rationnelle est de classe C1.
Proposition 3.17 Supposons que f : R2 → R est différentiable en (a, b) ∈ R2.i) Si h : R → R est dérivable en f(a, b), alors h ◦ f est dérivable en (a, b) et
∇(h ◦ f) = h′(f(a, b))∇f(a, b),
c’est à dire∂(h ◦ f)∂x
(a, b) = h′(f(a, b))∂f∂x
(a, b) et ∂(h ◦ f)∂y
(a, b) = h′(f(a, b))∂f∂y
(a, b)
ii) Si γ : R → R2 est dérivable en t0 (ses composantes γ1 et γ2 sont dérivables)et γ(t0) = (a, b), alors f ◦ γ est dérivable en t0 et
(f ◦ γ)′(t0) = ∇f(a, b) · (γ′1(t0), γ′2(t0)),
c’est à dire,
(f ◦ γ)′(t0) = ∂f
∂x(a, b)γ′1(t0) + ∂f
∂y(a, b)γ′2(t0))
[Démonstration]
Exemple 3.18 i) On sait que la fonction
f(x, y) = x2y2
x2 + y2
se prolonge en une fonction C1 sur R2 et que son gradient est nul en 0. Il suitque la fonction
g(x, y) = sin( x2y2
x2 + y2 )
« est » est C1 sur R2 et que son gradient aussi est nul en 0.

14 B04 – Version du March 13, 2009
ii) La fonction f(x, y) = x3y
x4 + y2 prolongée par 0 à l’origine n’est pas différen-
tiable : en effet, si on pose α(t) = (t, t2), on a
(f ◦ α)(t) = t3t2
t4 + t4= t
2
qui est aussi valide pour t = 0 si bien que (f ◦ α)′(t) = 12 . Or on a
∇f(0, 0) · (α′1(0), α′2(0)) = (0, 0) · (0, 0) = 0.
Proposition 3.19 Si f : R2 → R est différentiable en (a, b), alors toutes les déri-vées directionnelles existent en (a, b) et on
f ′(α,β)(a, b) = ∇f(a, b) · (α, β)
On résume en f ′v = ∇f · v. Il suit que f ′v est maximal dans la direction de ∇f (pour‖v‖ fixé).
[Démonstration]
Exemple 3.20 Avec
f(x, y) =
x2y2
x2 + y2 si (x, y) 6= (0, 0)0 sinon
comme d’habitude, on retrouve bien f ′(1,1)(0, 0) = (0, 0) · (1, 1) = 0.
Définition 3.21 (Généralisation) Soit f : Rn → R une fonction réelle de nvariables réelles.
i) Les dérivées partielles de f en P0 := (a1, . . . , an) ∈ Rn sont les dérivées desfonctions partielles (si elles existent) :
∂f
∂xi(P0) := f ′xi(P0)
Le gradient de f en P est alors le vecteur
∇f(P ) = ( ∂f∂x1
(P0), . . . , ∂f∂xn
(P0)) ∈ Rn
ii) Étant donné un vecteur v ∈ Rn, la dérivée de de direction v en P de f est ladérivée en P de la fonction directionnelle t 7→ f(P + tv)
iii) La fonction f est différentiable en P si elle admet des dérivées partielles enP et qu’en plus,
∆f(P ) = ∇f(P0) ·∆P + o(∆P ).

B04 – Version du March 13, 2009 15
iv) La fonction f : R2 → R est de classe C1 si ses dérivées partielles existent etsont continues.
Théorème 3.22 (Généralisation) Si f : Rn → R est de classe C1, alors f estdifférentiable. Et si f est différentiable, alors f est continue.
Théorème 3.23 (Généralisation) Si f : Rn → R et g : Rn → R sont différen-tiables en P0, alors
i) f + g est différentiable en P0 et
∇(f + g)(P0) = ∇f(P0) +∇g(P0),
ii) fg est différentiable en P0 et
∇(fg)(P0) = g(P0)∇f(P0) + f(P0)∇g(P0) et
iii) Si g(P0) 6= 0, alors fgest différentiable en (P0) et
∇(fg
)(P0) = 1g(P0)2 (g(P0)∇f(P0)− f(P0)∇g(P0))
[Démonstration]
Définition 3.24 (Généralisation) Une fonction vectorielle de plusieurs variablesréelles f : Rm → Rn est différentiable (en un point P de Rm) ou de classe C1 sitoutes ses composantes f1, . . . , fn les sont. La jacobienne de f en P est la matrice
Jf (P ) =
∇f1(P )
...∇fn(P )
=
∂f1/∂x1(P ) . . . ∂f1/∂xm(P )
... ...∂fn/∂x1(P ) . . . ∂fn/∂xm(P )
.
Exemple 3.25 i) Si f(x, y) = (x2 + y2, x2 − y2, xy) et P = (2,−1), alors
Jf =
2x 2y2x −2yy x
et Jf (P ) =
4 −24 2−1 2
.ii) La fonction (r, θ) 7→ (x, y) avec x = r cos θ et y = r sin θ a pour jacobienne[
cos θ sin θr sin θ −r cos θ
].
Théorème 3.26 (Généralisation) Si f : Rm → Rn est différentiable en P ∈ Rm
et g : Rn → Rp est différentiable en f(P ), alors g ◦ f est différentiable en P et on a
Jg◦f (P ) = Jg(f(P )) · Jf (P ).
Et de même pour C1.

16 B04 – Version du March 13, 2009
Corollaire 3.27 Si f : Rm → Rn et g : Rn → Rp sont C1, alors g ◦ f aussi.
Exemple 3.28 (Changement de variable) i) Si u et v dépendent de x et y,on peut voir une fonction f de u et v comme fonction de x et y et (sous réserved’existence), on aura
∂f
∂x= ∂f
∂u
∂u
∂x+ ∂f
∂v
∂v
∂x
∂f
∂y= ∂f
∂u
∂u
∂y+ ∂f
∂v
∂v
∂y
.
En effet, dire que u et v dépendent de x et y signifie qu’il existe une fonctionvectorielle
ϕ : R2 // R2
(x, y) � // (u, v)
Et dire qu’on voit f comme fonction de x et y signifie qu’on regarde la fonctioncomposée f ◦ ϕ. On a alors Jf◦φ(x, y) = Jf (u, v) · Jφ(x, y). On réécrit ça en
[∂f∂x
∂f∂y
]=[∂f∂u
∂f∂v
] [ ∂u∂x
∂u∂y
∂v∂x
∂v∂y
]
ii) Comme cas particulier, on peut regarder les coordonnées polaires{x = a+ r cos θy = b+ r sin θ
∂f
∂r= ∂f
∂xcos θ + ∂f
∂ysin θ
∂f
∂θ= r
∂f
∂xsin θ − r∂f
∂ycos θ
.
iii) Comme application, on peut voir que f ′v = ∂f∂r. Plus précisément, si v est le
vecteur de norme 1 et d’angle θ, on a
f ′v(a, b) = ∇f(a, b) · (cos θ, sin θ) = ∂f
∂x(a, b) cos θ + ∂f
∂y(a, b) sin θ = ∂f
∂r(a, b).
Définition 3.29 Une courbe C dans Rn est l’image d’un chemin α : R → Rn. Siα est dérivable en t et α(t) = P , la droite dirigée par α′(t) est dite tangente à C enP .
Exemple 3.30 Le cercle est l’image du chemin α : t→ (cos t, sin t). Sa dérivée estα′ : t → (sin t,− cos t). On a α(π2 ) = (0, 1) et α′(π2 ) = (−1, 0). Il y a donc unetangente horizontale en (0, 1).
[DESSIN]

B04 – Version du March 13, 2009 17
Définition 3.31 Le plan tangent à une surface S ⊂ R3 en un point P ∈ S estl’ensemble de toutes les tangentes aux courbes tracées sur S passant par P .
Attention : ce n’est pas toujours un plan (considérer l’origine d’un cône par exemple).
Proposition 3.32 Soit F : R3 → R différentiable et
S := {(x, y, z) ∈ R3, F (x, y, z) = 0}.
Soit P := (a, b, c) ∈ S avec ∇F (P ) 6= 0. Alors, le plan tangent à S en P a pouréquation
∂F
∂x(P )(x− a) + ∂F
∂y(P )(y − b) + ∂F
∂z(P )(z − c) = 0.
[Démonstration]
Exemple 3.33 i) Le plan tangent un point, par exemple P = (1, 0, 0) de lasphère unité x2 + y2 + z2 = 1. On a donc F (x, y, z) = x2 + y2 + z2 − 1 si bienque
∂F
∂x= 2x, ∂F
∂y= 2y et ∂F
∂z= 2z
et alors∂F
∂x(P ) = 2, ∂F
∂y(P ) = 0 et ∂F
∂z(P ) = 0.
Le plan tangent à donc pour équation 2(x−1)+0y+0z = 0, c’est à dire x = 1.[DESSIN]
ii) Il n’y a pas de plan tangent à l’origine P = (0, 0, 0) du cône d’équation x2+y2 =z2 car ∇F (0, 0, 0) = (0, 0, 0).
[DESSIN]
Corollaire 3.34 Soit S le graphe d’une fonction différentiable f : R2 → R etP = (a, b) ∈ R2. Le plan tangent à (a, b, f(a, b)) a pour équation
z = f(a, b) + ∂f
∂x(P )(x− a) + ∂f
∂y(P )(y − b).
Exemple 3.35 Pour f(x, y) = x2 + y2 et P = (0, 0), le graphe est un bol posé surle plan tangent qui n’est autre que le plan xOy.
Définition 3.36 Une fonction f : R2 → R est de classe C2 si les dérivées partielles(existent et) sont de classe C1. En général, on note
f ′xx = ∂2f
∂x2 := ∂
∂x(∂f∂x
), f ′yx = ∂2f
∂y∂x:= ∂
∂y(∂f∂x
)
f ′xy = ∂2f
∂x∂y:= ∂
∂x(∂f∂y
) et f ′yy = ∂2f
∂y2 := ∂
∂y(∂f∂y
).

18 B04 – Version du March 13, 2009
Exemple 3.37
f(x, y) =
xy3
x2 + y2 si (x, y) 6= (0, 0)0 sinon
On a∂f
∂x(x, y) = y3(x2 + y2)− 2x2y3
(x2 + y2)2 = y3(y2 − x2)(x2 + y2)2
et ∂f∂x
(x, y) = 0. On voit donc que
∂f
∂x(0, y) = y5
(y2)2 = y
et il suit donc que∂2f
∂y∂x(0, 0) = 1.
D’autre part, on a
∂f
∂y(x, y) = 3xy2(x2 + y2)− 2xy4
(x2 + y2)2 = xy2(3x2 + y2)(x2 + y2)2
et bien sûr ∂f∂y
(x, y) = 0. On voit donc que
∂f
∂y(0, x) = 0
et il suit donc que∂2f
∂x∂y(0, 0) = 0 6= ∂2f
∂y∂x(0, 0).
Théorème 3.38 (de Schwartz) Si f : R2 → R est C2, alors
∂2f
∂x∂y= ∂2f
∂y∂x.
[Démonstration]
Exemple 3.39 La fonction
f(x, y) =
xy3
x2 + y2 si (x, y) 6= (0, 0)0 sinon
n’est pas de classe C2.
Définition 3.40 (Généralisation) i) Une fonction f : R2 → R est de classeCk si toutes les dérivées partielles jusqu’à l’ordre k existent et sont continues.Grâce au théorème de Schwartz, il suffit de considérer les
∂i+jf
∂xi∂yj, i+ j ≤ k.

B04 – Version du March 13, 2009 19
ii) Une fonction f : Rn → R est de classe Ck si toutes les dérivées partielles
∂i1+···+inf
∂xi11 · · · ∂xinn, i1 + · · · in ≤ k.
existent et sont continues.iii) Une fonction vectorielle f : Rm → Rn est de classe Ck si toutes ses compo-
santes le sont.
Théorème 3.41 (Généralisation) Être de classe Ck est stable par somme, pro-duit, quotient et composition.
[Démonstration]
4 Fonctions implicites
Définition 4.1 i) Un voisinage d’un réel a est une partie V de R qui contientun intervale (ouvert) I contenant x.
ii) Un voisinage V de (a, b) ∈ R2 est une partie V ⊂ R2 qui contient un disque(ouvert) contenant P .
iii) Un voisinage V d’un point P de Rn est une partie qui contient une boule(ouverte) contenant P .
[DESSIN]
Exemple 4.2 i) ]− 1, 1[ est un voisinage de 0 dans R. Mais pas [0, 1].
[DESSIN]
ii) V := {(x, y), 0 ≤ x, y ≤ 1} est un voisinage de (1/2, 1/2) dans R2.
[DESSIN]
iii) R \ {(x, 0), x > 0} n’est pas un voisinage de (0, 0) dans R2.
[DESSIN]
Définition 4.3 Soit F : R2 → R et (a, b) ∈ R2 tel que F (a, b) = 0. On dit quel’équation F (x, y) = 0 définit y comme fonction implicite de x au voisinage de (a, b)s’il existe ϕ : R → R telle que ϕ(a) = b et
y = ϕ(x)⇔ F (x, y) = 0
au voisinage de (a, b). On verra alors y comme fonction de x au voisinage de a avecy(a) = b (c’est à dire qu’on écrira y au lieu de ϕ).

20 B04 – Version du March 13, 2009
Exemple 4.4 i) L’équation x = y2 définit y comme fonction implicite de x auvoisinage de (1, 1) : prendre y =
√x. Mais ça définit aussi y comme fonction
implicite de x au voisinage de (1,−1) : prendre y = −√x.
[DESSIN]ii) xy = 0 ne définit pas y comme fonction implicite de x au voisinage de (0, 0).
Théorème 4.5 Si F : R2 → R est C1 au voisinage de (a, b) et (∂F/∂y)(a, b) 6= 0,alors F (x, y) = 0 définit y comme fonction implicite de x au voisinage de (a, b) eton a
y′(a) = −(∂F/∂x)(a, b)(∂F/∂y)(a, b) .
[Démonstration]
Exemple 4.6 Si F (x, y) = x − y2, on a (∂F/∂x) = 1 et (∂F/∂y) = −2y si bienque (∂F/∂y)(1, 1) = −2 6= 0. On voit donc que y est fonction implicite de x avecy(1) = 1. De plus, comme (∂F/∂x)(1, 1) = 1 et on aura y′(1) = − 1
−2 = 12 . Ici,
comme on sait que y =√x, on peut le vérifier en remarquant que y′ = 1
2√x.
Définition 4.7 (Généralisation) Soit F : R3 → R et P0 = (a, b, c) ∈ R3 tel queF (P0) = 0. On dit que l’équation F (x, y, z) = 0 définit z comme fonction implicitede x et de y au voisinage de P0 s’il existe ϕ : R2 → R telle que ϕ(a, b) = c et
z = ϕ(x, y)⇔ F (x, y, z) = 0
au voisinage de P0. On verra alors z comme fonction de (x, y) au voisinage de (a, b)avec z(a, b) = c.
Exemple 4.8 L’équation x2 + y2 + z2 = 1 définit z comme fonction implicite dex, y au voisinage de (0, 0, 1) : on a en fait z =
√1− x2 − y2.
Théorème 4.9 (Généralisation) Si F : R3 → R est C1 au voisinage de P0 :=(a, b, c) et (∂F/∂z)(P0) 6= 0, alors F (x, y, z) = 0 définit z comme fonction implicitede x et y au voisinage de P0 et on a
∂z
∂x(a, b) = −(∂F/∂x)(P0)
(∂F/∂z)(P0) et ∂z
∂y(a, b) = −(∂F/∂y)(P0)
(∂F/∂z)(P0) .
Exemple 4.10 L’équation
z3 + 2z + ez−x−y2 = cos(x− y + z)
définit z comme fonction implicite de x, y à l’origine. On pose
F (x, y, z) = z3 + 2z + ez−x−y2 − cos(x− y + z)

B04 – Version du March 13, 2009 21
et on vérifie que F (0, 0, 0) = 0. Puis on calcule
∂F/∂x = −ez−x−y2 + sin(x− y + z), , ∂F/∂y = −2yez−x−y2 − sin(x− y + z)
et ∂F/∂z = z2 + 2 + ez−x−y2 + sin(x− y + z).
On en déduit que
(∂F/∂x)(0, 0, 0) = −1, (∂F/∂y)(0, 0, 0) = 0 et (∂F/∂z)(0, 0, 0) = 3
et on voit en particulier que (∂F/∂z)(0, 0, 0) 6= 0 et on aura
∂z
∂x(0, 0) = 1
3 et ∂z
∂y(0, 0) = 0.
La même chose en pratique, on vérifie d’abord que l’origine satisfait bien l’équation :0 + 0 + 1 = cos 0. Puis on fait x = y = 0 et on dérive les deux membres par rapportà z pour trouver 3z2 + 2 + ez et − sin(z) puis on fait z = 0, ce qui donne 3 6= 0.Pour calculer la valeur de la dérivée partielle de z par rapport à x, on fait y = 0 eton dérive par rapport à x, ce qui donne en (x, 0),
3z2 ∂z
∂x+ 2∂z
∂x+ (∂z
∂x− 1)ez−x = −(1 + ∂z
∂x) sin(x+ z)
puis on fait x = z = 0, ce qui donne 2 ∂z∂x
(0, 0)+( ∂z∂x
(0, 0)−1) = 0 et donc ∂z∂x
(0, 0) = 13 .
On fait ensuite la même chose pour la dérivée partielle de z par rapport à Y . Onfait x = 0 et on dérive par rapport à y, ce qui donne en (0, y),
3z2∂z
∂y+ 2∂z
∂y+ (∂z
∂y− 2y)ez−y2 = −(1− ∂z
∂y) sin(x+ z)
puis on fait y = z = 0, ce qui donne 2∂z∂y
(0, 0) + ∂z∂y
(0, 0) = 0 et donc ∂z∂y
(0, 0) = 0.
5 Développements limités
Remarque 5.1 Si g : R → R est continue sur [0, 1] et dérivable sur ]0, 1[, il existeθ ∈]0, 1[ telle que g(1) = g(0) + g′(θ).
[DESSIN]
Théorème 5.2 (des accroissements finis) Si f : R2 → R est différentiable surle segment [P0, P ], et ∆P := −−→P0P comme d’habitude, il existe P1 ∈]P0, P [ tel que
f(P ) = f(P0) +∇f(P1) ·∆P.
En d’autres termes, si P0 = (a, b) et P = (x, y), on a
f(x, y) = f(a, b)+∂f∂x
(a+θ(x−a), b+θ(y−b))·(x−a)+∂f∂y
(a+θ(x−a), b+θ(y−b))·(y−b)
avec θ ∈]0, 1[.

22 B04 – Version du March 13, 2009
[Démonstration]
Définition 5.3 Si f : R2 → R est de classe C2, le Hessien de f en P = (a, b) estla matrice
Hf (P ) := ∂2f
∂x2 (a, b) ∂2f∂x∂y
(a, b)∂2f∂x∂y
(a, b) ∂2f∂y2 (a, b)
.On le verra comme une application de R2 dans R en associant à un vecteur v =(α, β) ∈ R2, le réel
v ·Hf (P ) · v := ∂2f
∂x2 (a, b)α2 + 2 ∂2f
∂x∂y(P )αβ + ∂2f
∂y2 (P )β2.
Exemple 5.4 Si f(x, y) = (x2 + y2)ex−y, on peut calculer ∇f et Hf partout. On a
∇f =((2x+ x2 + y2)ex−y, (2y − x2 − y2)ex−y
)si bien que
Hf :=
(2 + 4x+ x2 + y2)ex−y (2y − 2x− x2 − y2)ex−y
(2y − 2x− x2 − y2)ex−y (2− 4y + x2 + y2)ex−y
.En particulier
∇f(0, 0) = (0, 0) et Hf (0, 0) =[
2 00 2
]
correspond à la forme quadratique correspondante est (x, y) 7→ 2x2 + 2y2.
Proposition 5.5 (de Taylor-Lagrange) Si f : R2 → R est de classe C2 il existeP1 ∈]P0, P [ tel que
f(P ) = f(P0) +∇f(P ) ·∆P + 12(∆P ·Hf (P1) ·∆P ).
En d’autres termes, si P0 = (a, b) et P = (x, y), on a
f(x, y) = f(a, b) + ∂f
∂x(a, b)(x− a)) + ∂f
∂y(a, b)(x− b))
+∂2f
∂x2 (P1)(x− a)2 + 2 ∂2f
∂x∂y(P1)(x− a)(y − b) + ∂2f
∂y2 (P1)(x− b)2
avec P1 = (a+ θ(x− a), b+ θ(x− b)) et θ ∈]0, 1[.
[Démonstration]

B04 – Version du March 13, 2009 23
Remarque 5.6 On retrouve en particulier la définition de la différentiabilité en P :
f(P ) = f(P0) +∇f(P ) ·∆P + ‖∆P‖ε(P ).
avec ε(P ) → 0 quand P → P0. En effet, si on pose M = ‖Hf (P1)‖ en prenant lesup des normes des entrées de la matrice, on a
‖12(∆P ·Hf (P1) ·∆P )
‖∆P‖ ‖ ≤M‖∆P‖ → 0.
Théorème 5.7 (Généralisation) Si f : R2 → R est de classe Ck avec k ≥ 3,alors
f(P ) = f(P0) +∇f(P ) ·∆P + 12(∆P ·Hf (P ) ·∆P ) + · · ·
Corollaire 5.8 Si f : R2 → R est de classe C3 avec k ≥ 3, alors
f(P ) = f(P0) +∇f(P ) ·∆P + 12(∆P ·Hf (P ) ·∆P ) + ‖∆P‖2ε(P )
avec ε(P )→ 0 quand P → P0.
Exemple 5.9 Avec Si f(x, y) = (x2 + y2)ex−y, on trouve donc
f(x, y) = 0 + 0x+ 0y + 12(2x2 + y2) + (x2 + y2)ε(x, y)
Recommended

![openMP.ppt [Mode de compatibilité] · La taille duLa taille du stack est limitée différentesest limitée , différentes variables d’environnement ou fonctions permettent d’agir](https://img.pdfslide.fr/doc/110x75/5e483d2ee5c2290fcc29f52c/mode-de-compatibilit-la-taille-dula-taille-du-stack-est-limite-diffrentesest.jpg)