Embed Size (px)
DESCRIPTION
Citation preview

1
Projet Robot LEGO Mindstorm

2
Objectifs :
0Construire0Programmer
3
Cahier des charges
Rapidité
Obstacles
DirectionPosition
Maniabilité
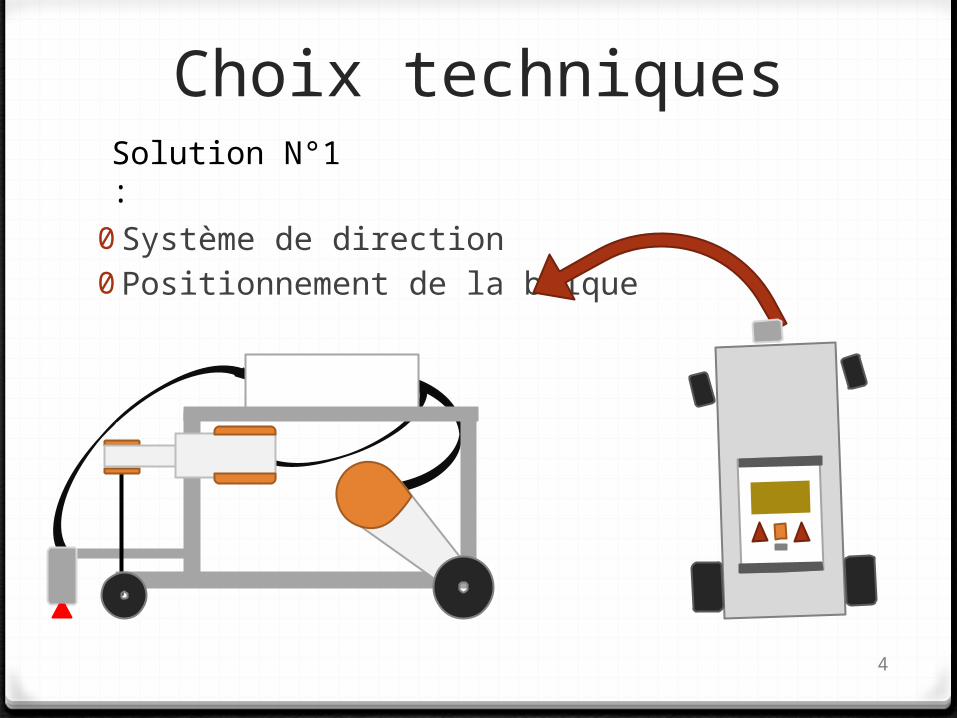
Choix techniques
0Système de direction0Positionnement de la brique
4
Solution N°1 :
5
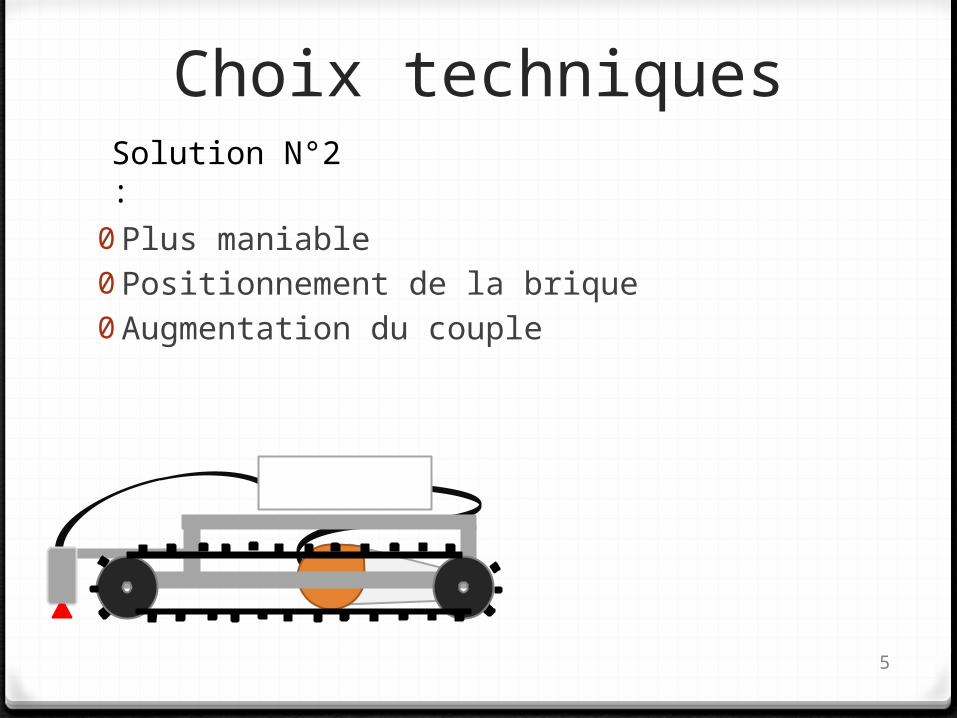
Choix techniquesSolution N°2 :
0Plus maniable0Positionnement de la brique0Augmentation du couple
6
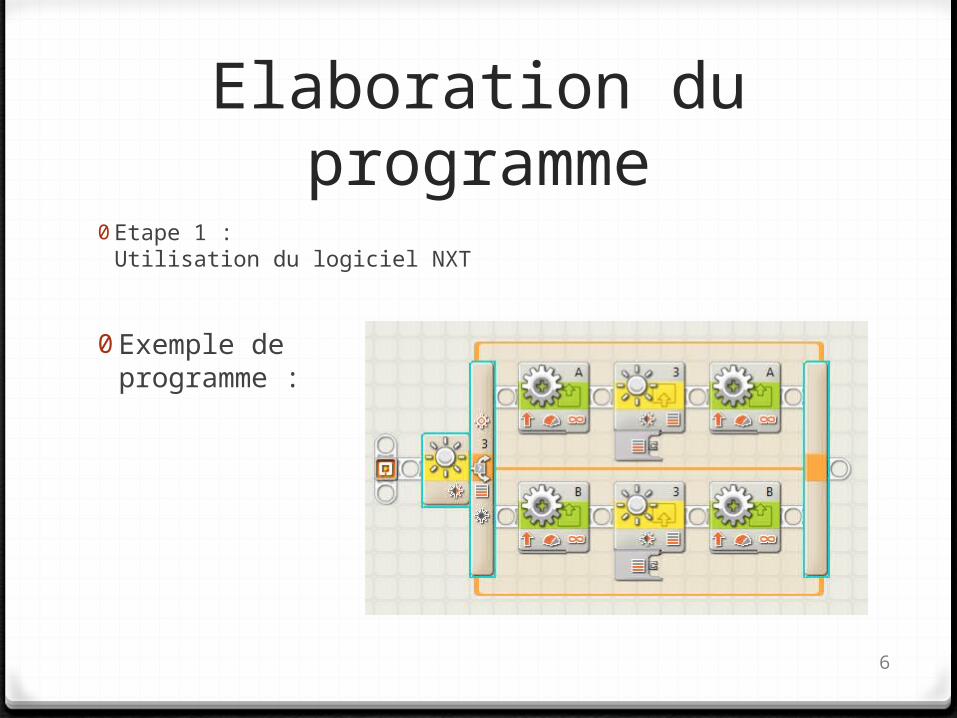
Elaboration du programme
0Etape 1 :Utilisation du logiciel NXT
0Exemple de programme :
7
Capteurs
8
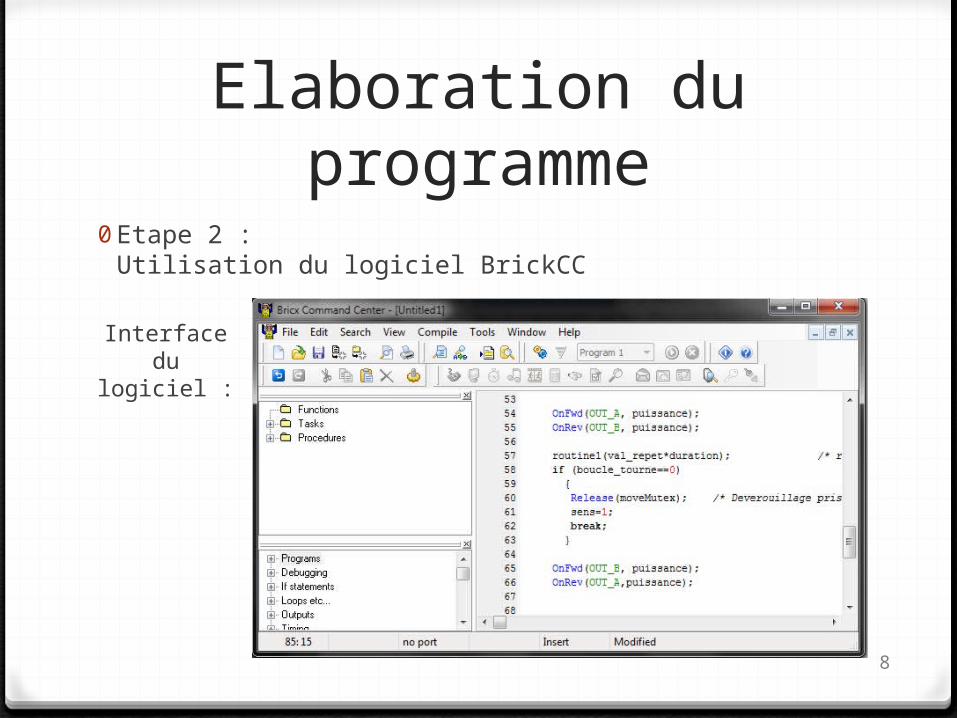
Elaboration du programme
0Etape 2 :Utilisation du logiciel BrickCC
Interface du logiciel
:
9
Solutions logicielles
0Recherche de l’algorithme
Objectifs :• Suivi de la ligne• Franchir les croisements de ligne• Détection des obstacles• Démarrage au claquement des
mains.
10
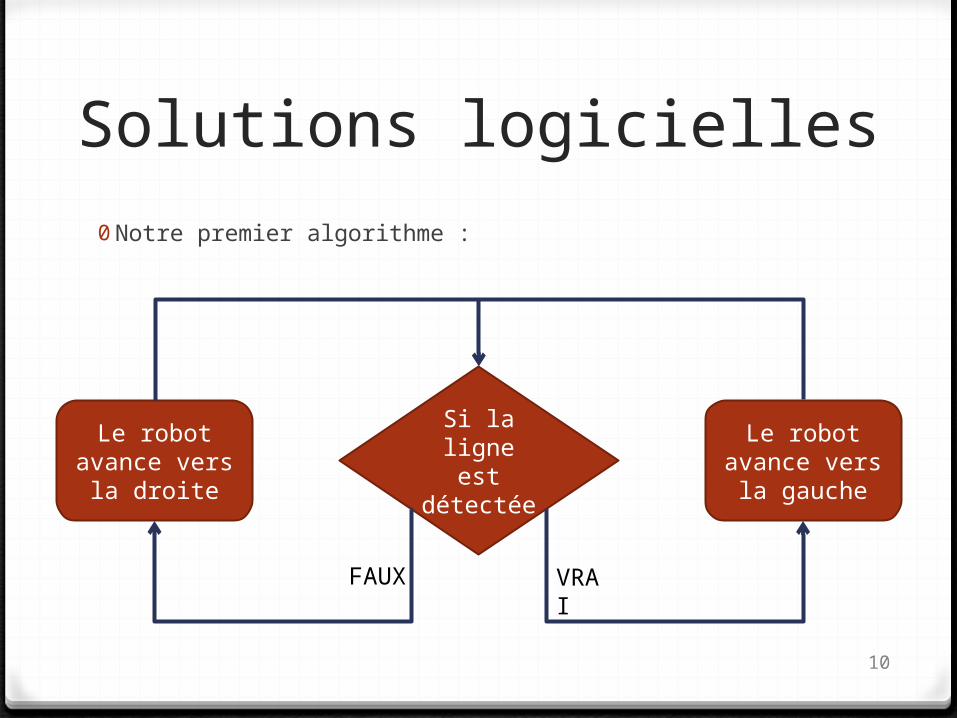
Solutions logicielles
0 Notre premier algorithme :
Si la ligne est
détectée
Le robot avance vers la droite
Le robot avance vers la gauche
VRAIFAUX