Embed Size (px)
Citation preview
ROBOT MOBILI AUTONOMI:
APPLICAZIONI INDUSTRIALI
E TECNOLOGIE
ANDREA BONARINI
ARTIFICIAL INTELLIGENCE AND ROBOTICS LAB
DIPARTMENTO DI ELETTRONICA, INFORMAZIONE E BIOINGEGNERIA
POLITECNICO DI MILANO
E-MAIL: [email protected]
URL:HTTP: / /WWW.DEIB.POLIMI.IT/PEOPLE/BONARINI

ROBOT MOBILI
AUTONOMI
2
Un robot mobile autonomo è in grado di:
• Sapere dove si trova in ogni momento rispetto a una mappa che
eventualmente può costruire (localizzazione)
• Pianificare il percorso per raggiungere un obiettivo
• Gestire eventuali problemi lungo il percorso (ostacoli imprevisti, …)
TECNOLOGIE
TRADIZIONALI (1)
L'ambiente indoor viene strutturato, inserendo:
• Bande magnetiche nel pavimento o strutturando il pavimento
• Costi di installazione $$$
• Rigidità di layout
• Gestione limitata degli ostacoli
• Linee colorate
• Costi di installazione $$
• Deperimento tracce
• Rigidità di layout
• Gestione limitata degli ostacoli
• Marker e beacon su pareti e soffitti
• Costi di installazione $($)
• Necessità di rilevare i marker
• Layout relativamente libero
• Gestione meno limitata degli ostacoli
3
TECNOLOGIE
TRADIZIONALI (2)
In outdoor:
• GPS
• Bassa risoluzione
• Necessità di spazi aperti
• Marker e beacon
• Costi di installazione $
• Condizioni ambientali (illuminazione, fenomeni atmosferici, …)
• Deperimento
• Manutenzione
4

APPLICAZIONI
INDUSTRIALI
• Logistica, magazzini automatizati
• Trasporto e caricamento
• Sorveglianza e monitoraggio
• Ispezione
5

APPLICAZIONI
AGRICOLE
• Trattamenti
• Gestione terreno
• Raccolto
• Monitoraggio
6
NUOVE ESIGENZE
• Flessibilità di movimento
• Magazzini e capannoni a layout dinamico
• Gestione eventi inattesi
• Ambiente condiviso con persone
• Precisione di localizzazione
• Pick and place in posizioni non predefinite (es.: raccolta
frutta, scaricamento camion)
• …
7
"NUOVE" TECNOLOGIE
• Misure di distanza di precisione
• Laser 2-D, laser 3-D usati non solo per sicurezza, ma anche per costruire la mappa e rilevare la posizione (SLAM)
• Potenziali problemi:
• Costi
• Condizioni ambientali
• Visione artificiale
• Telecamere per il riconoscimento di elementi chiave "naturali" nell'ambiente (SLAM)
• Potenziali problemi:
• Condizioni ambientali
• Immagini di profondità
• Telecamere e sistemi che forniscono immagini di distanza anziché intensità luminosa
• Potenziali problemi:
• Condizioni ambientali
8
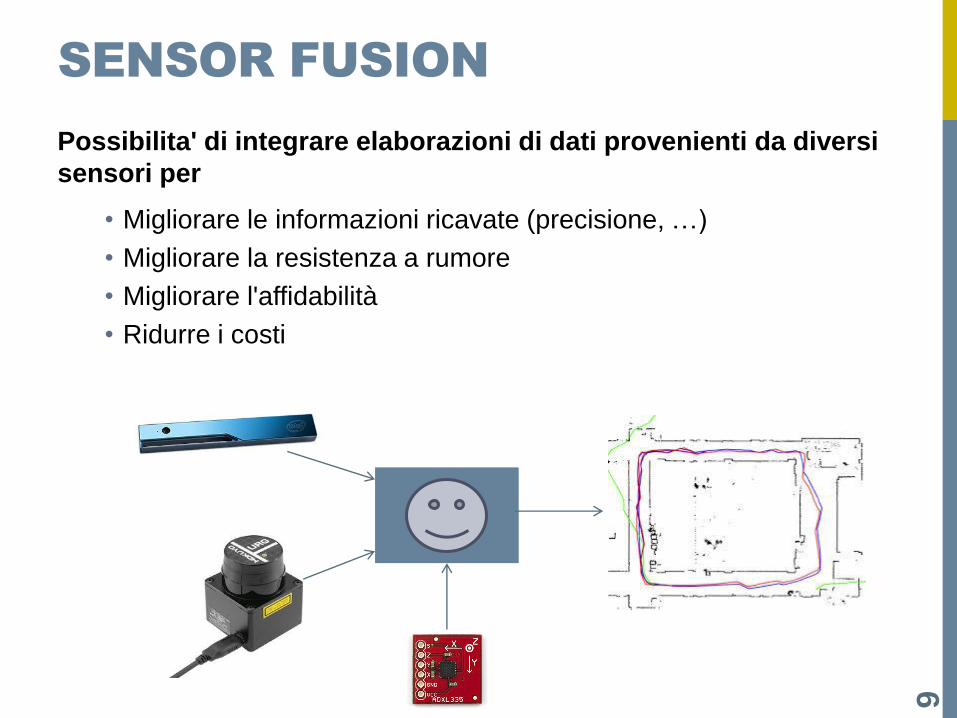
SENSOR FUSION
Possibilita' di integrare elaborazioni di dati provenienti da diversi
sensori per
• Migliorare le informazioni ricavate (precisione, …)
• Migliorare la resistenza a rumore
• Migliorare l'affidabilità
• Ridurre i costi
9
UN ESEMPIO DI
MAPPING
10
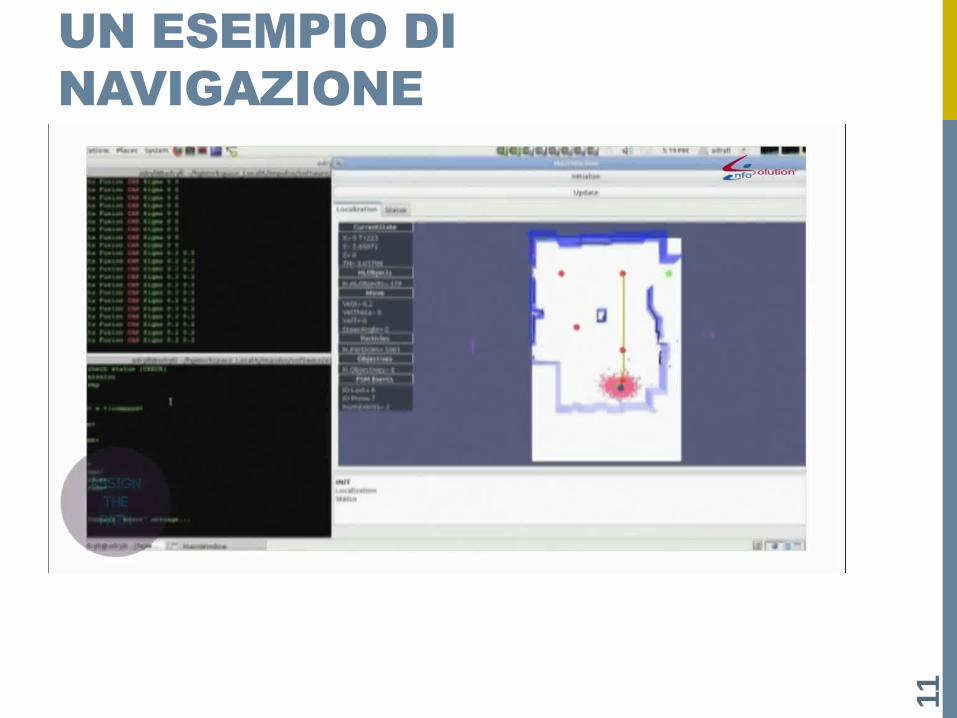
UN ESEMPIO DI
NAVIGAZIONE
11
ELABORAZIONE DATI
Come elaboriamo tutti questi dati?
• Elaboratore a bordo (normale PC, (Raspberry PI, O-Droid, …))
• Programmi in linguaggio C/C++/C#/Java/Python …
• Librerie esistenti sviluppate, testate e manutenute da grosse
comunità (Open CV, ROS, …)
12
IN CONCLUSIONE…
• Oggi è possibile realizzare robot mobili in grado di muoversi in
autonomia senza perdersi anche in ambienti non strutturati
• Sensori con costi e prestazioni ragionevoli
• Elaborazione a bordo robot a costi ragionevoli
• Sono possibili applicazioni innovative e flessibili: si aprono
nuovi mercati
13