Page 1 Christian MAIRE EduKlub S.A. Tous droits de lauteur des
uvres rservs. Sauf autorisation, la reproduction ainsi que toute
utilisation des uvres autre que la consultation individuelle et
prive sont interdites.
Physique
MECANIQUE DU SOLIDE EXERCICE DORAL
-EXERCICE 17.4-
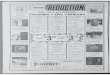
ENONCE : 3 disques et une tige
O
A
B
1( )D
2( )D
3( )D
OB est une tige de masse M et de longueur 4L, pouvanttourner
sans frottements autour d'un axe horizontalpassant par le point
O.On considre 3 disques de rayon L et de masse m; celuide centre O
est fixe; les 2 autres sont articuls autourde 2 axes passant par
les points A et B de la tige : ilstournent librement autour de ces
axes.Les 3 disques sont au contact, et l'on suppose qu'il y
aroulement sans glissement d'un disque sur l'autre.
Lensemble reste dans un mme plan vertical, et lon donne les
moments dinertie suivants :
pour la tige, par rapport O : 216
3MLJ =
pour les disques, par rapport leur centre : 2
2mLI =
Etudier le mouvement du systme ( / 2 / 2 ) ; on sintressera en
particulier aux petites oscillations.
Page 2 Christian MAIRE EduKlub S.A. Tous droits de lauteur des
uvres rservs. Sauf autorisation, la reproduction ainsi que toute
utilisation des uvres autre que la consultation individuelle et
prive sont interdites.
Physique
MECANIQUE DU SOLIDE EXERCICE DORAL
CORRIGE : 3 disques et une tige
Analyse du problme : priori, il y a 3 degrs de libert : langle
de rotation de la tige ( ), celui du disque ( 2D ), que lon notera
2 , et celui du disque ( 3D ), not 3 . Le roulement sans glissement
de ( 2D ) sur ( 1D ), au point de contact appel I, et celui de ( 3D
) sur ( 2D ), au point de contact J, fourniront 2 relations
supplmentaires : il ny a donc quun seul degr de libert, et nous
pourrons nous contenter dun thorme nergtique.
Le systme choisi est lensemble {tige+2 disques mobiles}, le
rfrentiel est le disque ( 1D ) ; il ne constitue pas un solide, il
faut donc considrer galement les forces intrieures. Les liaisons en
O, A et B sont sans frottements pas de puissance dissipe ; puisquil
y a roulement sans glissement en I et J, la puissance totale des
actions de contact en I et J est nulle (il y a bien des
frottements, pour que a roule , mais la vitesse de glissement tant
nulle, la rsultante des actions de contact ne travaille pas) : nous
utiliserons donc la conservation de lnergie mcanique, en considrant
lnergie cintique et potentielle des diffrentes parties du
systme.
Rsolution du problme :
Roulement sans glissement :
2 2 1 1 2 2
0I D I D Av v v I A = = = + """### # # #
, o 2#
est le vecteur rotation instantane du disque ( 2D ).
ze#
e#
re#
Nous prendrons une base cylindrique lie la tige, le sens plus
desrotations sera ainsi le sens trigonomtrique.Les points A et B
effectuent un mouvement circulaire, leur vitesseest donc
orthoradiale.
Il vient alors : 2 20 2 (2 )r zL e L e e L L e = + = i i# # # #
#
2 2 =i
2 2 3 3 2 2 3 3
J D J D A Bv v v J A v J B = + = + """"# """"## # # # # #
, o 3#
est le vecteur rotation du disque ( 3D ).
On a : 2 32 ( ) 4r z r zL e L e e L e L e e + = + i i# # # # #
#
3 2(2 4 )e e = + i i# #
3 0 = Rq : le rsultat prcdent peut sembler surprenant, mais
plausible : lorsque la tige tourne avec
une vitesse 0i% , le disque tourne autour de laxe passant par B
dans le sens contraire il est
possible que dans le rfrentiel dtude, 3 0 = ; le disque ( 3D )
est donc en translation circulaire, rsultat dont nous nous
servirons pour calculer simplement son nergie cintique.
Calcul de lnergie potentielle :
tige : 2 (1 cos )tigeP
E Mg L = , en prenant lorigine des potentiels lorsque la tige
est verticale.
Rq : choisir une constante est bien moins important que de
veiller ce que PE augmente lorsquon slve dans le champ de pesanteur
; ici, la tige slve pour
cos cos & ' & , ce qui est correct. disques : de la mme
manire : 2 (1 cos ) 4 (1 cos )
disquesPE mg L mg L = +
2 ( 3 )(1 cos )TotP
E Lg M m = +
Page 3 Christian MAIRE EduKlub S.A. Tous droits de lauteur des
uvres rservs. Sauf autorisation, la reproduction ainsi que toute
utilisation des uvres autre que la consultation individuelle et
prive sont interdites.
Physique
MECANIQUE DU SOLIDE EXERCICE DORAL
Calcul de lnergie cintique :
tige : 2 2 21 8( ) ( )2 3tigeC
E J ML = =i i
disque ( 2D ) : appliquons le thorme de Knig concernant lnergie
cintique : 2
2 2 2 2 2 21 2
1 1 1 1( ) (2 ) (2 ) 3 ( )2 2 2 2 2C A
mLE D mv I m L mL = + = + =i i i
disque ( 3D ) : 2 2 2 2
31 1( ) (4 ) 8 ( )2 2C B
E D mv m L mL = = =i i
2 28 11 ( )
3TotCME m L = +
i
Lnergie mcanique a donc pour expression :
2 282 ( 3 )(1 cos ) 11 ( )3Tot TotM P C C PME E E E E Lg M m m L
cste = + = = = + + + =
i.
Aprs drivation temporelle et simplification par 2Li (
i=0 correspond une situation
statique) :
8( 3 )sin 11 03Mg M m m L + + + =
ii
Rq : cette quation nest pas linaire et na pas de solution
analytique.
Pour de petites oscillations, sin ( , ce qui permet dcrire :
3 08 113
M m gM Lm
+
+ = + ii
les oscillations sont harmoniques de la forme :
( ) cos( ) sin( )t A t B t = + avec pour pulsation : 38 113
M m gM Lm
+= +