Embed Size (px)
Citation preview

Fiche n° : CYCLE 4 – TECHNOLOGIE 3 e ROBOT ASPIRATEUR CONNECTÉ
Fiche élève >> Aspirateur autonome
Classe :
Date : NOM Prénom :
C4 3 F1 Robot aspirateur Page 1/2
Mise en situation :
Vous êtes programmeur de robots aspirateurs dans l’entreprise « Robocleaner », qui vend des robots aspirateurs à bas coûts . Grâce à sa veille technologique , l’entreprise a saisi l’intérêt de développer un robot aspirateur qui puisse fonctionner en mode automatique mais qui puisse aussi être piloté en mode manuel à tout moment . Le pilotage en mode manuel permettra de diriger le
ACTIVITÉ 1 – Comment programmer le parcours d’un ro bot ?
Votre première mission consiste à programmer le robot pour qu’il soit capable d’effectuer des déplacements par lignes parallèles dans une pièce de façon autonome. Son parcours aura l’aspect indiqué ci-dessous. Une autre équipe étudiant la partie du parcours durant lequel le robot fait le tour de la pièce, votre étude ne portera que sur les allers-retours d’un côté de la pièce à l’autre .
Le prototype utilisé pour tester le fonctionnement du futur robot aspirateur sera un robot mBot . Vous programmerez ce robot avec le logiciel mBlock . Vous utiliserez ses capteurs à ultrasons pour détecter les obstacles. Le robot n’avancera que si l’obstacle le plus proche est à plus de 25 cm , puis il tournera alternativement à gauche et à droite s’il détecte un obstacle à moins de 8 cm .
Pour permettre d’alterner une rotation à droite puis une rotation à gauche quand il y a un obstacle , on va utiliser un compteur : - au départ la valeur du compteur est à 0 : on le robot effectue une première rotation dans un sens puis la valeur du compteur est incrémentée (+1) ; - lors de la deuxième rotation , la valeur du compteur est donc à 1 : le robot tourne dans l’autre sens puis la valeur du compteur est décrémentée (-1) et redevient 0 ; - la valeur du compteur sera donc une fois égale à 0 (rotation du robot dans un sens) puis une fois égale à 1 (rotation du robot dans l’autre sens), puis égale à 0, puis égale à 1… - c’est ainsi qu’il y a alternance de la valeur du compteur et du sens de rotation du moteur !
Limites de
l’étude
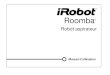
Algorithme étudié :
Obstacle devant ?
Faire demi-tour à droite
Obstacle devant ?
Faire demi-tour à gauche
Avancer
Début
Avancer
Appui sur Start/Stop
Oui
Oui
Non
Non
si compteur à 0
incrémenter (+1)
si compteur à 1
décrémenter (-1)
Première rotation (voir page suivante) :
le robot fait un demi-tour à droite
Deuxième rotation (voir page suivante) :
le robot fait un demi-tour à gauche

Fiche n° : CYCLE 4 – TECHNOLOGIE 3 e ROBOT ASPIRATEUR CONNECTÉ
Fiche élève >> Aspirateur autonome
Classe :
Date : NOM Prénom :
C4 3 F1 Robot aspirateur Page 2/2
Travail demandé :
1. Ouvrez le fichier « Robot aspirateur P1.sb2 » et enregistrez-le dans votre espace personnel. 2. Complétez le programme suivant l’algorigramme pa ge 1 et téléversez-le dans votre prototype
(robot mBot) afin qu’il effectue le parcours demand é. 3. Lorsque vos tests sont concluants, faites valide r le fonctionnement du prototype par le professeur
puis complétez le programme ci-dessous. 4. Modifiez votre programme pour qu’un appui sur le bouton Start/Stop (bouton de la carte du mBot)
permette d’arrêter le robot durant son déplacement. 5. Expliquez au professeur la solution retenue pour arrêter le robot en cours de déplacement puis
complétez l’algorigramme ci-dessous.
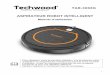
Partie à compléter pour la partie 3 : Partie à compléter pour la partie 5 :
Complétez les parties entourées du programme : Complétez la partie manquante de l’algorigramme :
Maîtrise des compétences associées à l’activité :
Niveau 1 : maîtrise insuffisante / Niveau 2 : maîtrise fragile / Niveau 3 : maîtrise satisfaisante / Niveau 4 : très bonne maîtrise
Niveau Compétences secondaires : 1 2 3 4 Imaginer des solutions pour produire des éléments de programmes informatiques en réponse au besoin > Algorithmes
Exprimer sa pensée à l’aide d’outils de description adaptés > Algorigrammes
Obstacle devant ?
Faire demi-tour à droite
Obstacle devant ?
Faire demi-tour à gauche
Avancer
Appui sur Start/Stop ?
Fin
Début
Avancer
Appui sur Start/Stop
Appui sur Start/Stop ?
Fin