Embed Size (px)
Citation preview
Analyse dynamique des structures2 Systèmes à masse répartie 2.1 Corps rigides 2.2 Corps flexibles
3 Systèmes à plusieurs degrés de liberté 3.1 Oscillations non amorties 3.2 Oscillations amorties 3.3 Oscillations entretenues 3.4 Amortissements massiques
4 Réponses et spectres
5 Indications pratiques
3.2 Oscillations amorties
Conditions initiales
Réutilisons la notation des systèmes sans amortissement
multiplier par
Lorsque est diagonale, nous avons N équations différentiellesen coordonnées modales. Ceci est appelé un amortissementclassique. Les modes propres sont les mêmes que pour lessystèmes sans amortissement. Lorsque n’est pas diagonale,les modes propres sont différents.
x = x(0) x = x(0)
MAz +CA z + KAz = 0
M * z +C * z + K * z = 0C*= ATCA
Mx +C x +Kx = 0
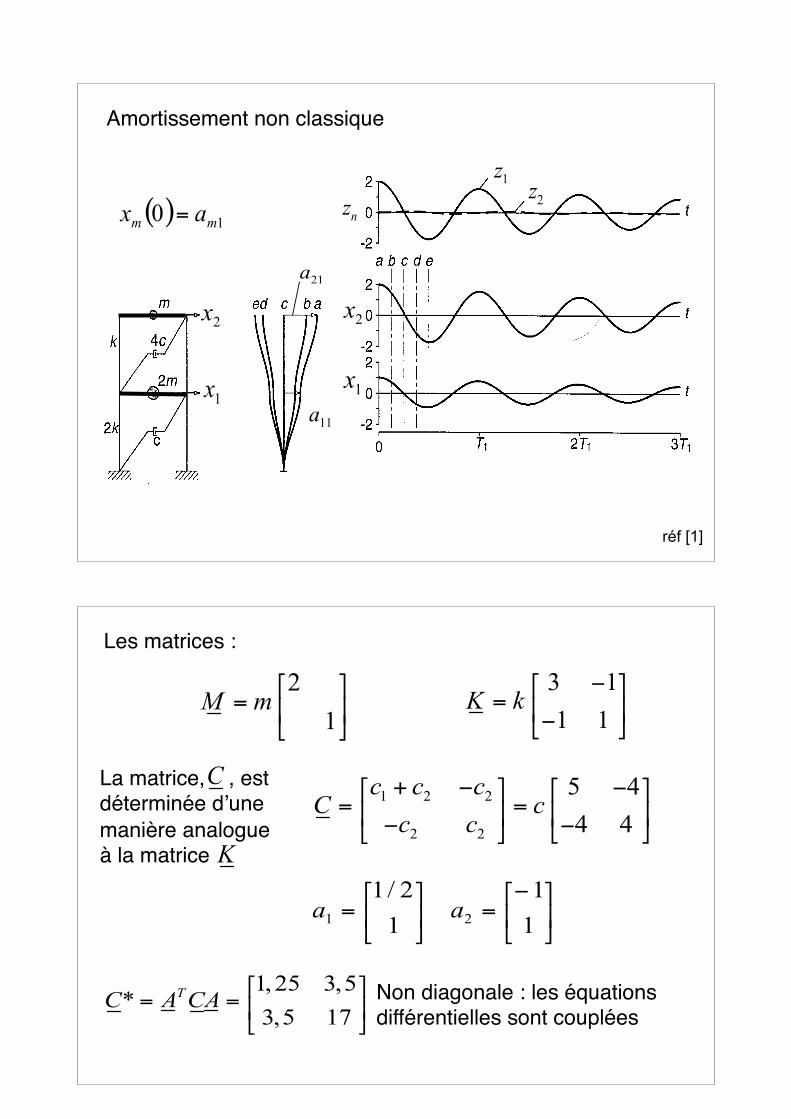
Amortissement non classique
sm 10.9.1
réf [1]
Les matrices :
La matrice, , estdéterminée d’unemanière analogueà la matrice
Non diagonale : les équationsdifférentielles sont couplées
m m
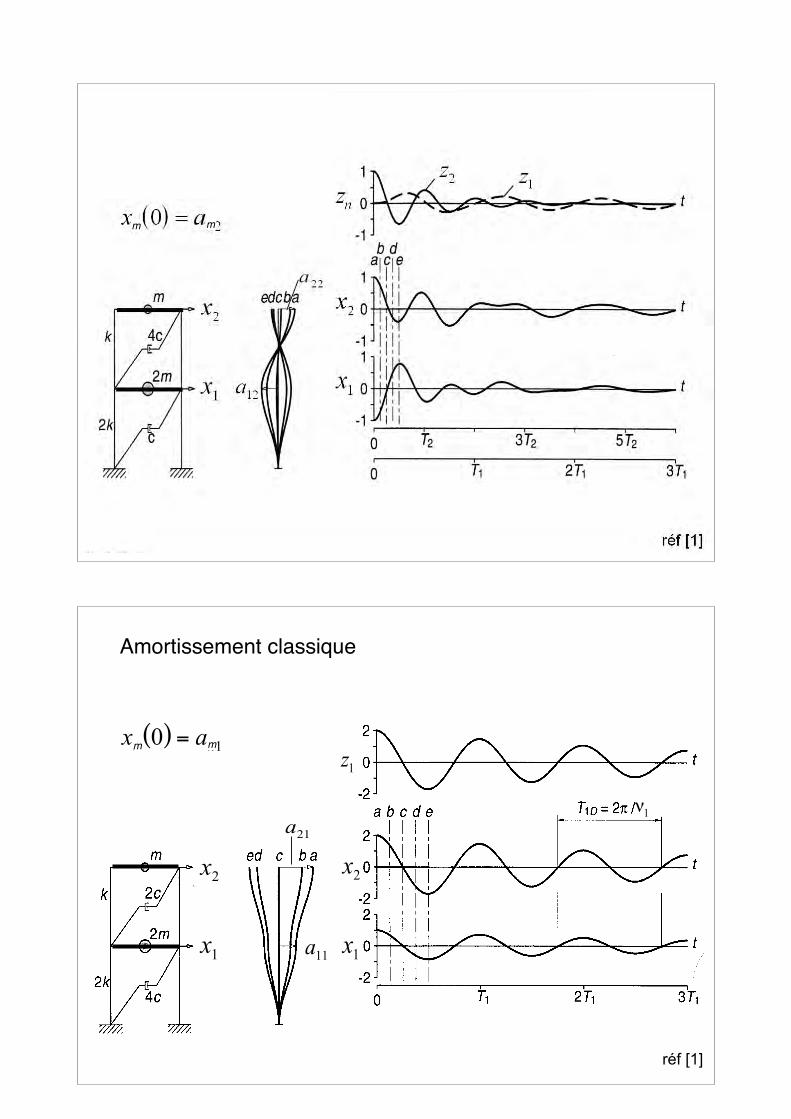
Amortissement classique
réf [1]
m m

Les deux équations ne sont pas couplées
Les éléments sont :
Ils se trouvent dansN équations mn * zn + cn * zn + kn * zn = 0
Les méthodes de résolution sont les mêmes que pour lessystèmes à un degré de liberté.
Quatre observations valables pour les conditions initiales qui sont proportionnelles à un des modes propres :
1 La réponse des autres modes est zéro.2 Le mode de l’oscillation n’est pas influencé par
l’amortissement.3 Le mouvement des masses n’est pas influencé par
l’amortissement.4 Le mouvement de chaque étage est harmonique.
réf [1]
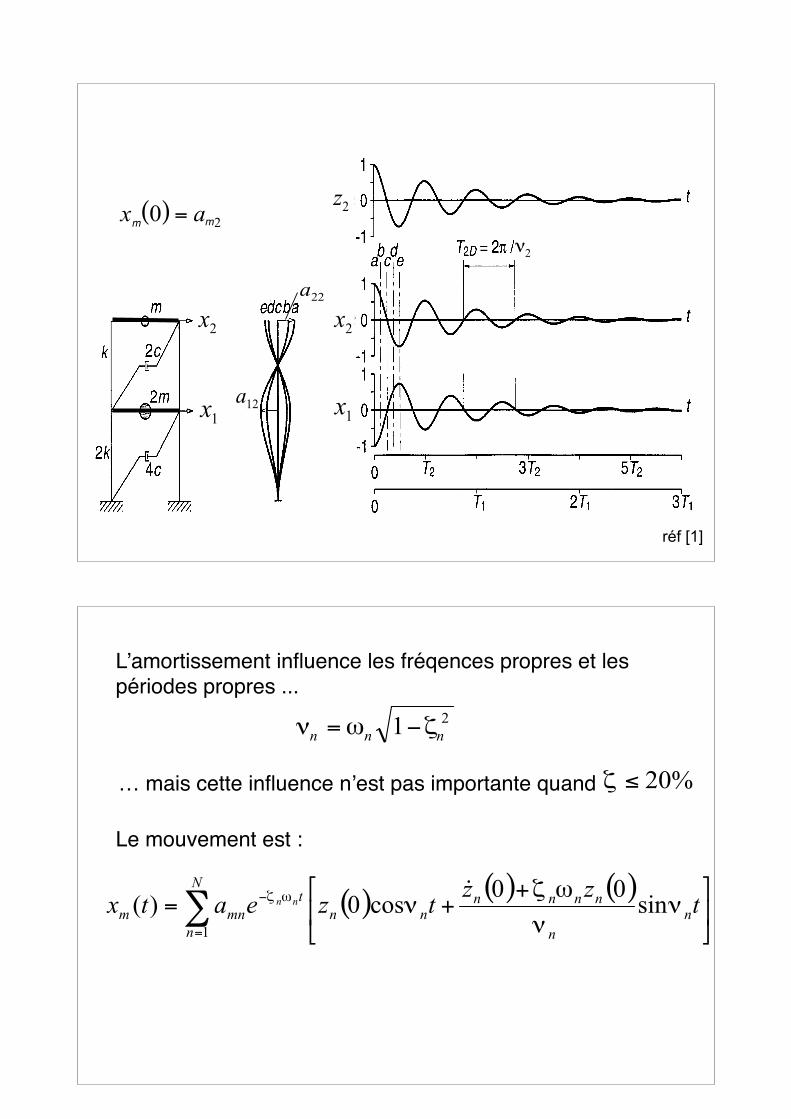
mm
L’amortissement influence les fréqences propres et lespériodes propres ...
Le mouvement est :
… mais cette influence n’est pas importante quand
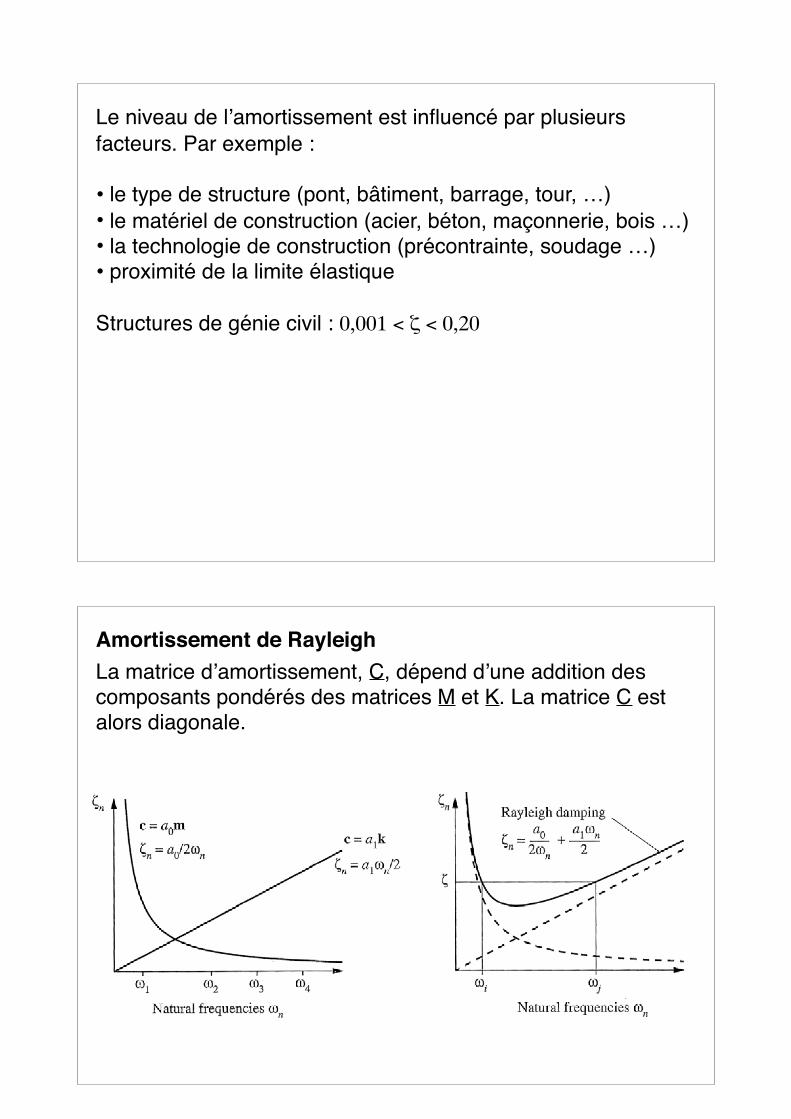
Le niveau de l’amortissement est influencé par plusieurs facteurs. Par exemple :
• le type de structure (pont, bâtiment, barrage, tour, …)• le matériel de construction (acier, béton, maçonnerie, bois …)• la technologie de construction (précontrainte, soudage …)• proximité de la limite élastique
Structures de génie civil : 0,001 < ζ < 0,20
Amortissement de RayleighLa matrice d’amortissement, C, dépend d’une addition des composants pondérés des matrices M et K. La matrice C est alors diagonale.
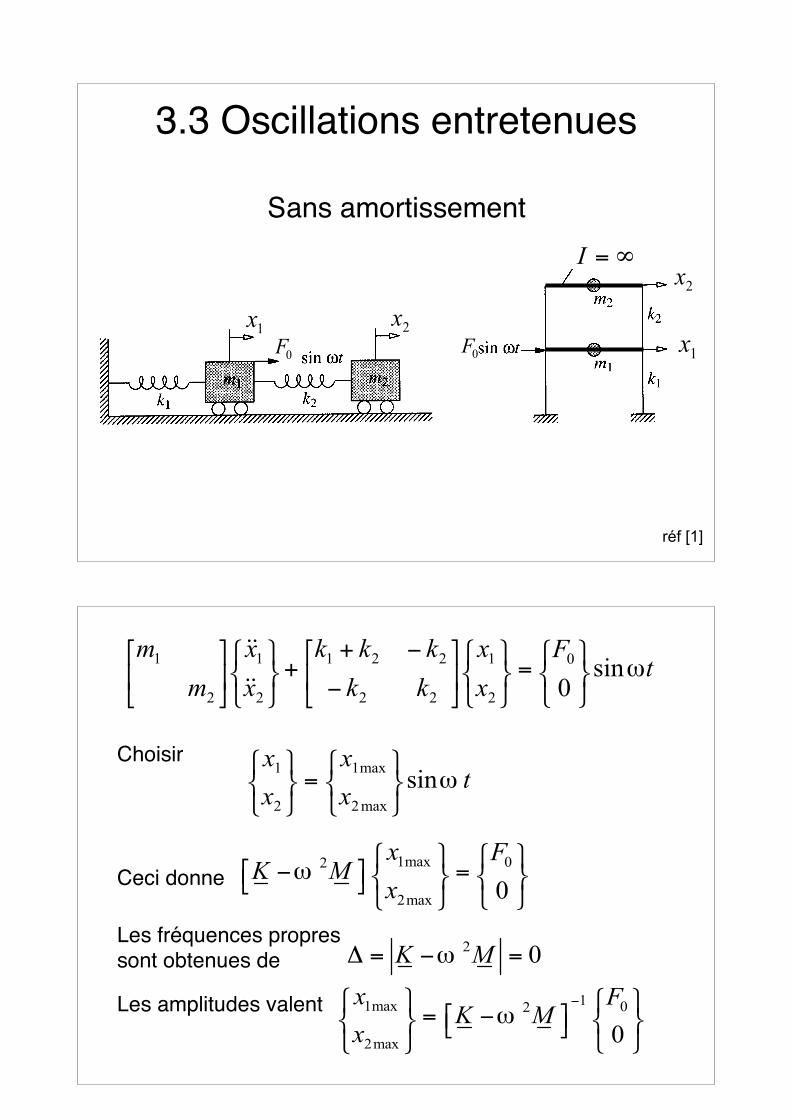
3.3 Oscillations entretenues
Sans amortissement
12.1.1 p 430
réf [1]
Choisir
Ceci donne
Les fréquences propres sont obtenues de
Les amplitudes valent
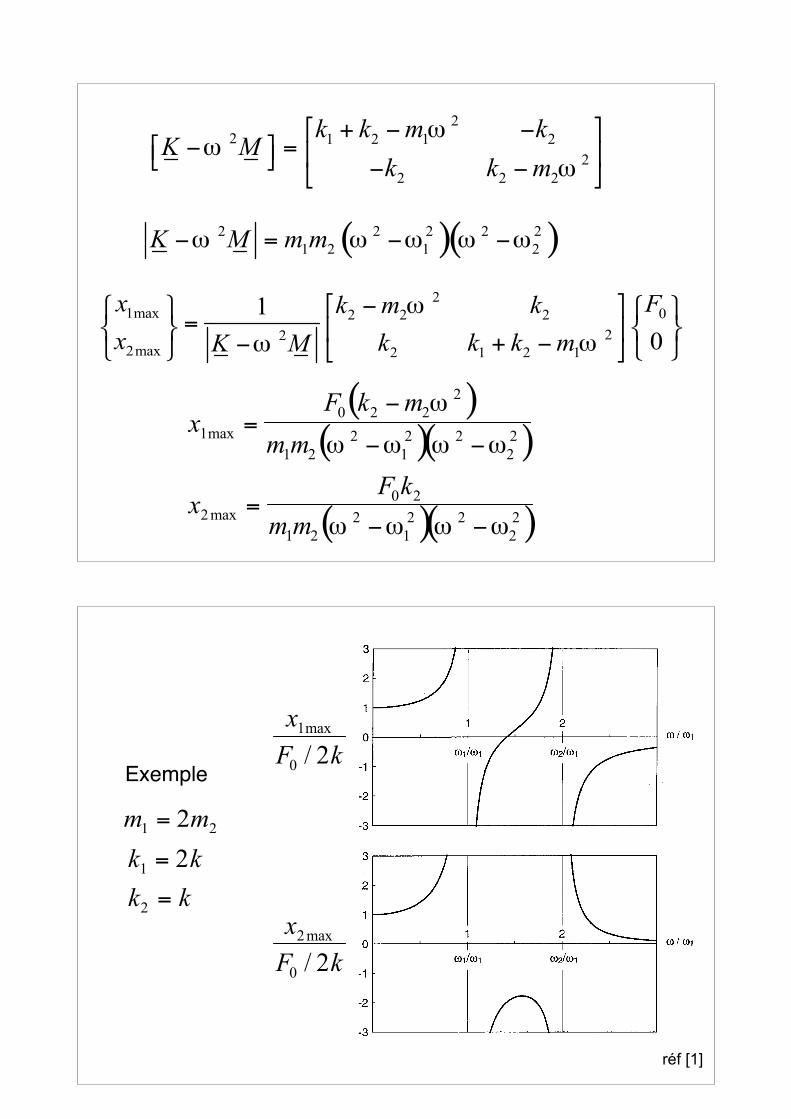
SM E12.1Exemple
réf [1]

Oscillations entretenues - avec amortissement
Il y a N équations
Une fois découplés, les systèmes à N degrés de libertépeuvent être traités comme N systèmes à un degré deliberté.
Les mouvements sont calculés par une superpositionmodale. Pour la position/sens de mouvement 1 :
3.4 Amortissements massiques (Tuned mass damper)
Applications : Bâtiments, tours, ponts
L’amortisseur est efficace uniquement sur une fourchette limitée de fréquences. Il peut être utilisé quand la vibration n’est pasharmonique. Meilleures applications : systèmes à un degré deliberté ou systèmes où un seul mode de vibration risque d’entrainer des problèmes.
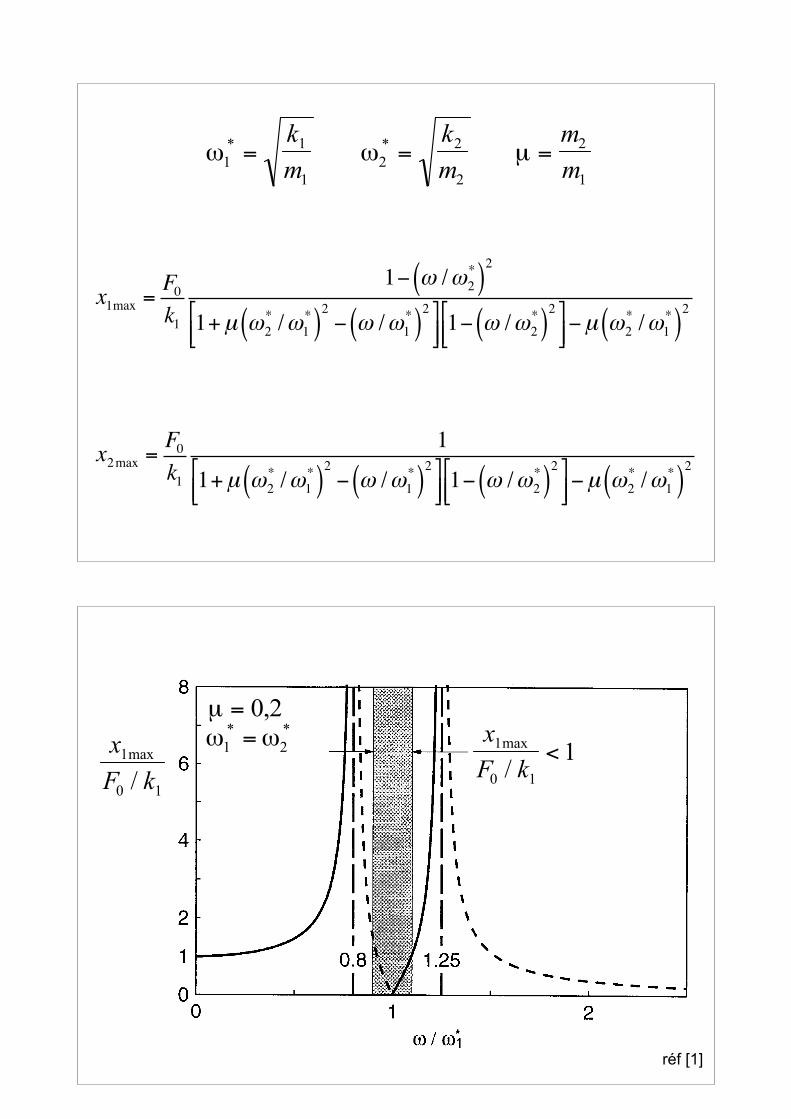
x1max =F0k1
1− ω /ω2*( )2
1+µ ω2* /ω1
*( )2− ω /ω1
*( )2"
#$%&' 1− ω /ω2
*( )2"
#$%&'−µ ω2
* /ω1*( )2
x2max =F0k1
1
1+µ ω2* /ω1
*( )2− ω /ω1
*( )2"
#$%&' 1− ω /ω2
*( )2"
#$%&'−µ ω2
* /ω1*( )2
Den Hartog p96sm 12.2.1b
réf [1]
La masse de l’amortisseur
quand
Et la force sur la masse de l’amortisseur vaut
L’amortisseur applique une force égale à l’excitation dansle sens opposé.
La fourchette d’opération de l’amortisseur dépend du rapportde masse, .
Amortisseurs massiques avec amortissement classique
Valeurs pour le meilleur amortissement
Ces formules ne sont théoriquement valables que pour
L’approximation est aussi valable pour un faible amortissement structural.
Le paramètre le plus critique est la fréquence. Des contrôlesréguliers sont essentiels pour assurer que la fréquence de l’amortisseur massique soit compatible à celle de la structure.
D’autres indications pratiques :
Essayer d’abord de modifier la fréquence propre de la structure.
Les meilleures applications sont des structures unidimension-nelles, telles que des tours, des ponts et des cheminées. Les applications aux dalles demandent plusieurs amortisseurs, ce qui amène à un plus grand investissement.
Les mauvaises applications sont des structures massives quisont déjà amorties.
Bonnes valeurs initiales - devrait être variable
Contrôler : le mouvement de , la résistance à la fatigue desressorts, l’entretien des ressorts, le comportement réel.





























