Embed Size (px)
Citation preview
Architecture d ’un
système à
MICROPROCESSEUR
©T.Berenguer Juin 2008

Applications des microprocesseur
1
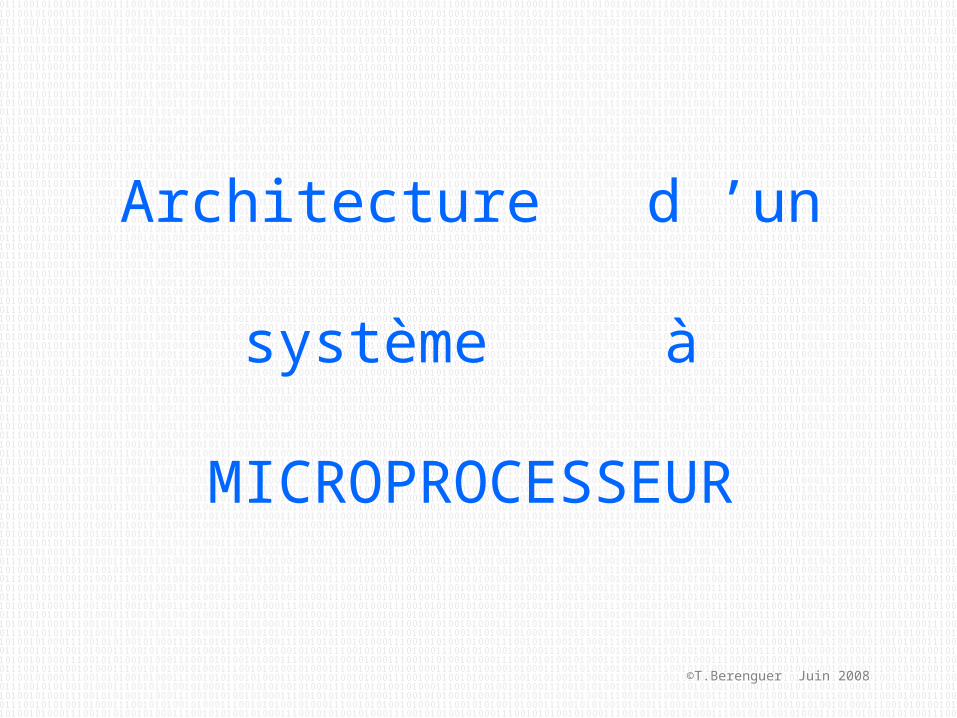
Qui a inventé le microprocesseur ? quand ? En 1971
Un peu d ’histoire
• Composant micro programmé• 4 bits• 2300 transistors• Horloge 100 Khz• Développé par INTEL pour BUSICOM
2
Pourquoi un microprocesseur ?• Intel a initialement produit des mémoires.
• Busicom, fabricant japonais de machines à calculer, lui demande en 1969 de mettre au point douze circuits intégrés pour assurer les fonctions de ses machines.
• Un ingénieur d’Intel, Ted Hoff, propose de concevoir un circuit intégré programmable unique pour réaliser l’ensemble de ces fonctions.
• Busicom approuve cette solution. Le travail fut réalisé en neuf mois sous la direction de Federico Faggin. Le 4004 est né en 1971. C’est le premier microprocesseur.
• Il a autant de puissance de calcul que l’ENIAC. Il utilise un « chemin de données à 4 bits » , ce qui le rend utilisable pour des automatismes ou des calculettes mais non pour construire un ordinateur.
• Intel rachète pour 60 000 $ les droits de Busicom sur le 4004 (peu après, Busicom fit faillite). Il faut trouver d’autres clients. Intel se lance dans une communication active pour convaincre la profession d’écrire des logiciels pour le 4004 et de l’utiliser pour des automatismes comme le contrôle des feux de circulation.
3
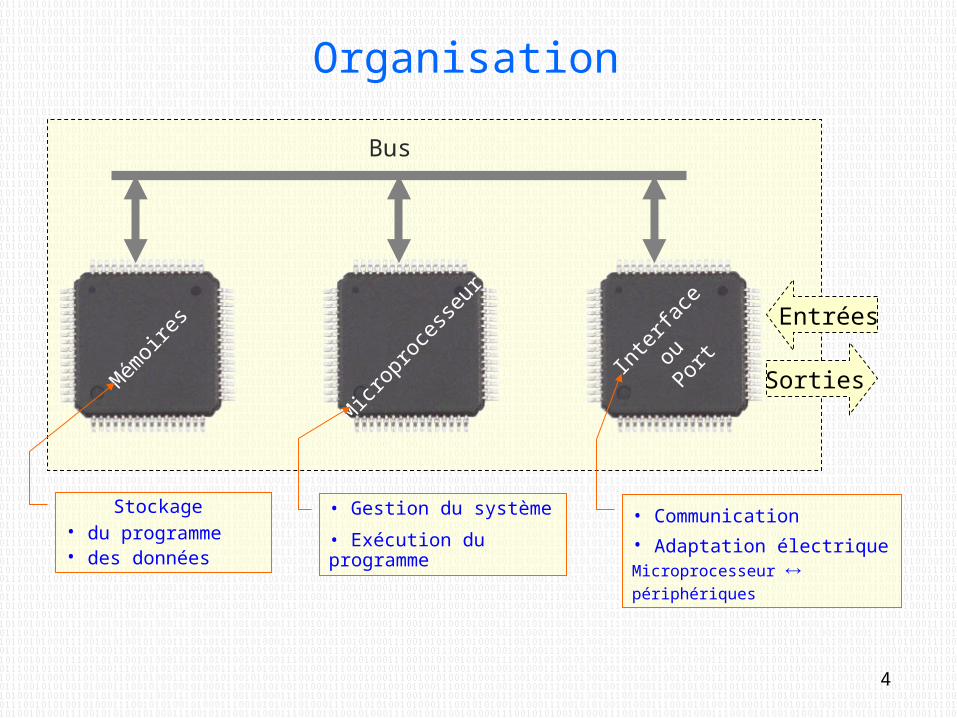
Organisation
Bus
Entrées
SortiesMicro
proc
esse
ur
Mém
oire
s
Inte
rface
ou
Port
Stockage • du programme • des données
• Gestion du système
• Exécution du programme
• Communication
• Adaptation électrique Microprocesseur périphériques
4
Rôle du microprocesseur
Le microprocesseur exécute un programme
Il existe plusieurs langages de programmation :
Assembleur ( langage machine)
Langage évolué ( C , Basic , Java … )
Un programme est une suite d’instructions qui réalise une tache
Une instruction est une opération simple
Opération de lecture ou écriture en mémoireOpération logique ( ET, OU, décalage …)Opération arithmétique ( Addition, soustraction … )
µ P
5
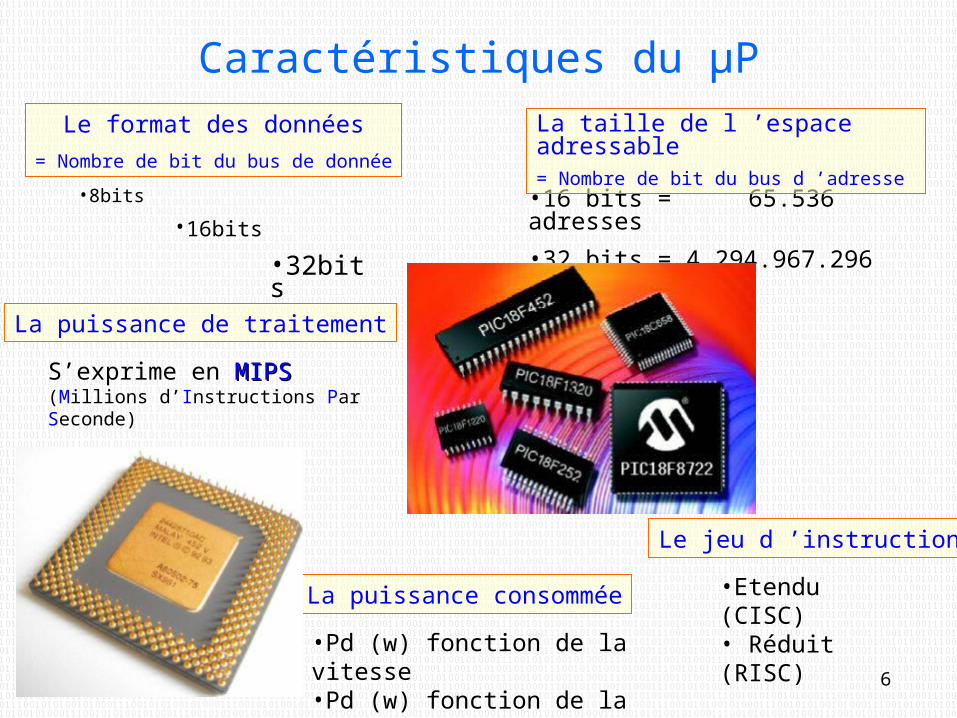
Caractéristiques du µP
•8bits
•16bits
•32bits
•16 bits = 65.536 adresses
•32 bits = 4.294.967.296 adresses
Le format des données
= Nombre de bit du bus de donnée
La taille de l ’espace adressable = Nombre de bit du bus d ’adresse
La puissance de traitement
S’exprime en MIPSMIPS(Millions d’Instructions Par Seconde)
•Etendu (CISC)• Réduit (RISC)
Le jeu d ’instructions
•Pd (w) fonction de la vitesse•Pd (w) fonction de la tension
La puissance consommée
6
Les mémoires 1/2 Une mémoire est un composant qui permet de stocker l ’information.
Une mémoire est caractérisée par :
•Sa capacité exprimée en Bit, Kbit , Mbit, Gbit
ou
octets, Ko, Mo, Go
1 Kilo = 210 = 1.024
1Méga = 220 = 1.048.576
1Giga = 230 = 1.073.741.824
•Son temps d ’accès
Exprimé en ns, il renseigne sur la vitesse de la mémoire
•Le format de son bus de donnée
1bit, 4bits, 8bits...
1 bit = information de base = ou
1 octet ( byte ) = 8 bits
= 165 10
7
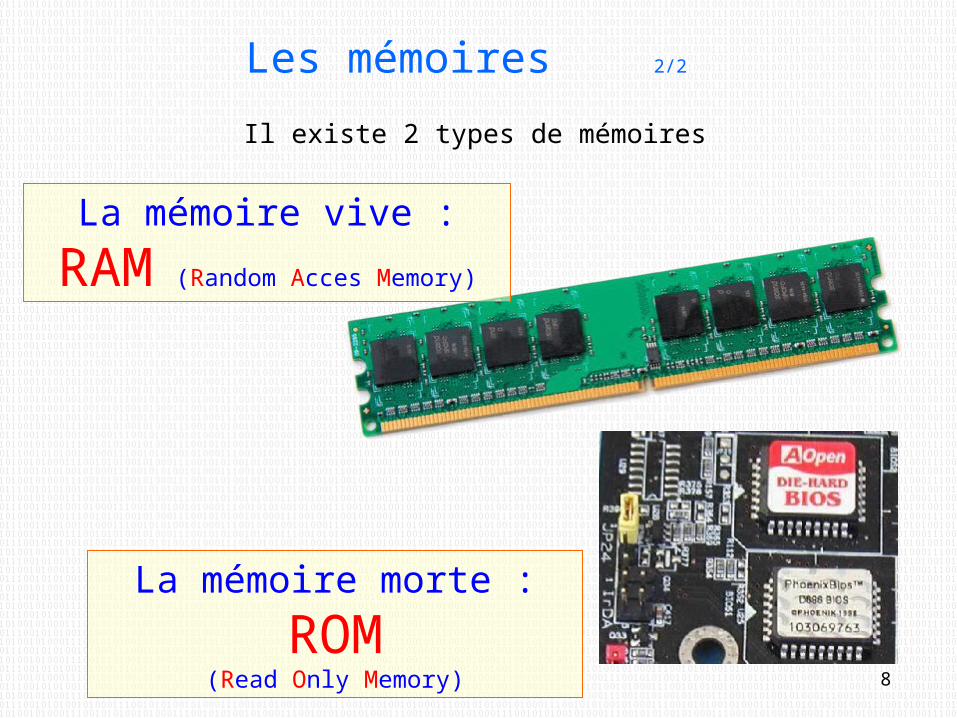
Les mémoires 2/2
La mémoire vive : RAM (Random Acces Memory)
La mémoire morte :
ROM(Read Only Memory)
Il existe 2 types de mémoires
8
Mémoire Vive : RAM
La RAM est utilisée pour le stockage de données temporaires.
(valeurs d’acquisition, résultats de calculs, etc.)
Dans la mémoire vive on peut lire et écrire.
La RAM est une mémoire volatile :
•Les données sont perdues à la mise hors tension.
•A la mise sous tension son contenu est aléatoire.
Il existe deux technologies de RAM :
•RAM statiques (cellule mémoire = bascule)
•rapide, capacité faible.
•RAM dynamiques (cellule mémoire =
Condensateur)
•lentes (rafraîchissement) , grande capacité.
9
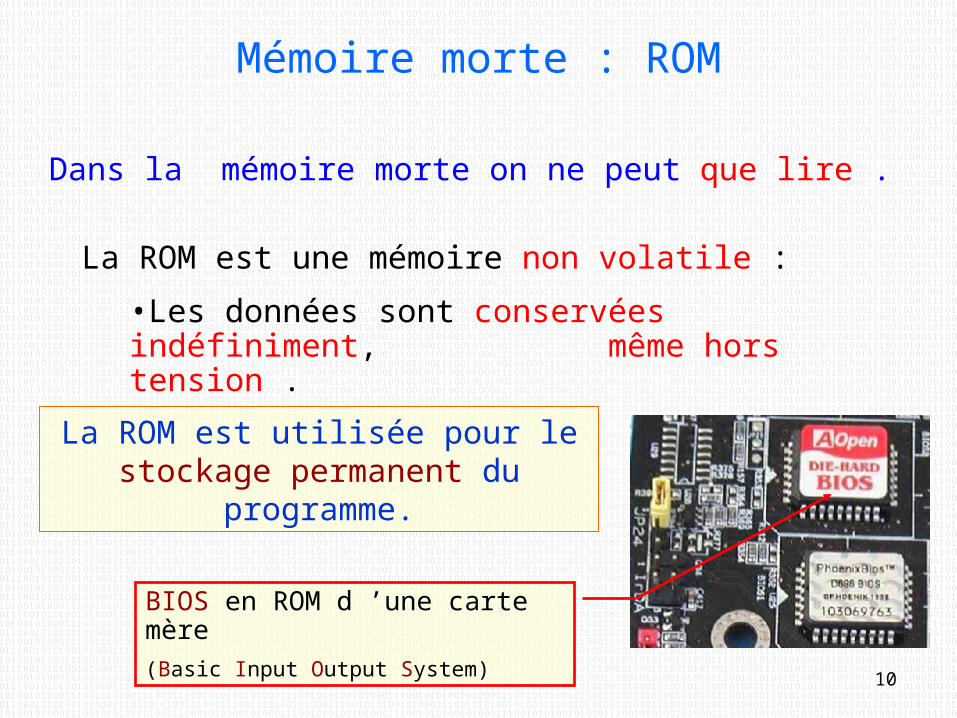
Mémoire morte : ROM
Dans la mémoire morte on ne peut que lire .
La ROM est une mémoire non volatile :
•Les données sont conservées indéfiniment, même hors tension .
La ROM est utilisée pour lestockage permanent du
programme.
BIOS en ROM d ’une carte mère(Basic Input Output System) 10
Micro
proc
esse
ur
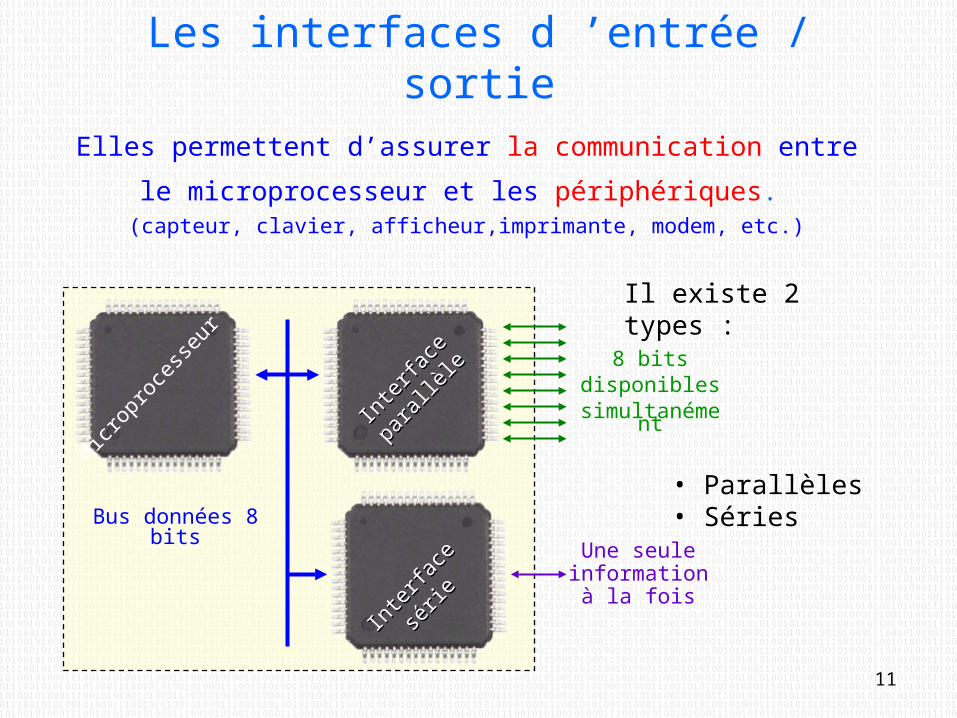
Les interfaces d ’entrée / sortie
Elles permettent d’assurer la communication entre le
microprocesseur et les périphériques. (capteur, clavier, afficheur,imprimante, modem, etc.)
Il existe 2 types :
• Parallèles• Séries
Une seule information
à la fois
8 bitsdisponibles
simultanément
Bus données 8 bits
Inte
rface
Inte
rface
para
llèle
para
llèle
Inte
rface
Inte
rface
série
série
11
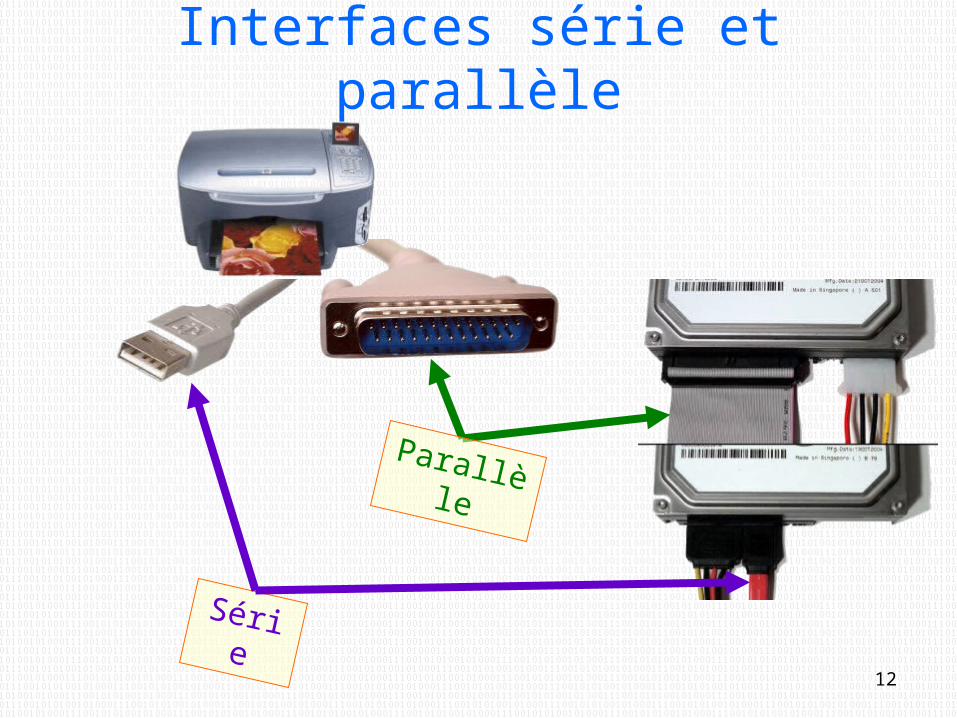
Interfaces série et parallèle
Parallèle
Série
12
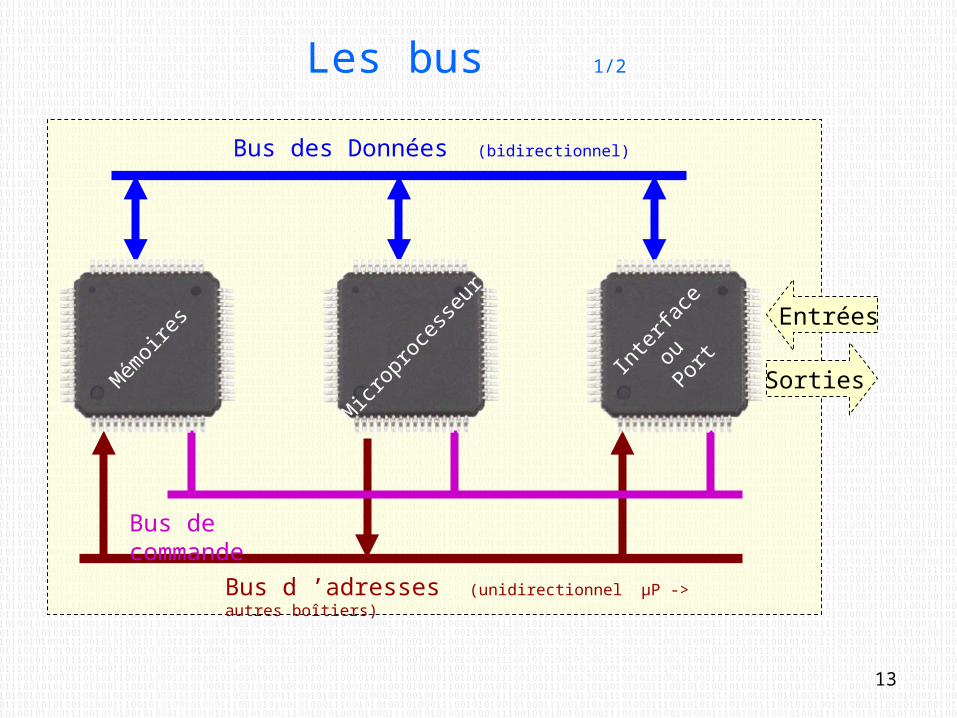
Les bus 1/2
Bus des Données (bidirectionnel)
Bus d ’adresses (unidirectionnel µP -> autres boîtiers)
Bus de commande
Entrées
SortiesMicro
proc
esse
ur
Mém
oire
s
Inte
rface
ou
Port
13
Les bus 2/2
Le bus d’adresses est unidirectionnel. Microprocesseur périphériques
Il permet la sélection des informations à traiter dans un espace mémoire (ou espace adressable) qui peut avoir 2n
emplacements, avec n = nombre de conducteurs du bus d'adresses.Le bus de commande (ou bus de contrôle)
Est constitué par quelques conducteurs qui assurent la synchronisation des flux d'informations sur les bus de données et d’ adresses.
Le bus de données est bidirectionnel. Microprocesseur périphériques
Il assure le transfert des informations entre le microprocesseur et son environnement, et inversement.
Son nombre de lignes est égal au format des mots de données du microprocesseur.
14
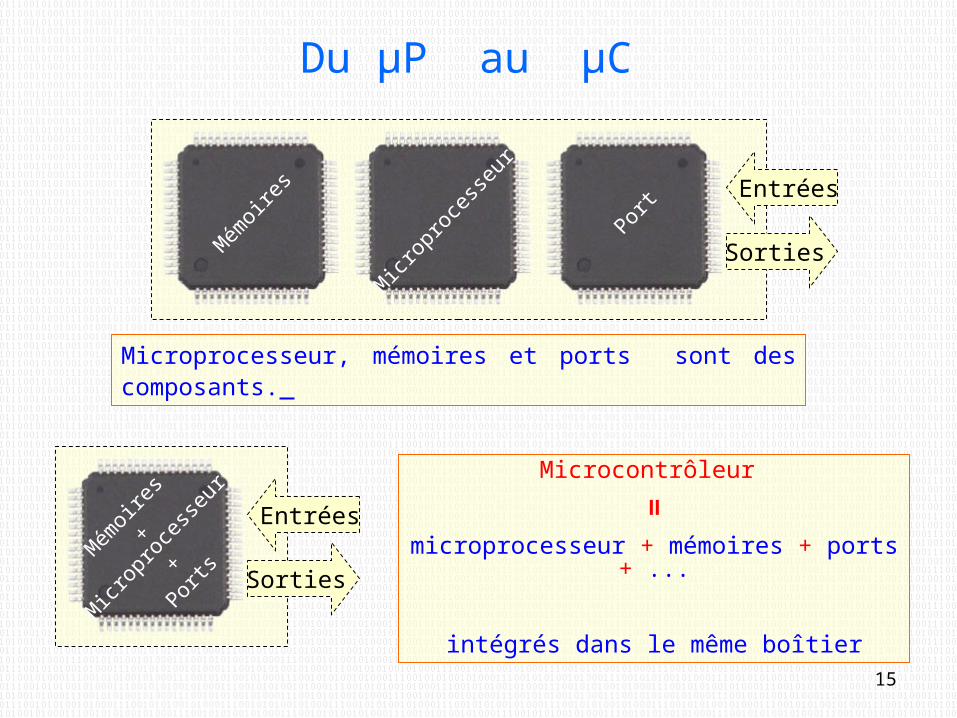
Du µP au µC
Entrées
Sorties
Micro
proc
esse
ur
Mém
oire
s
Port
Entrées
Sorties
Mém
oire
s+
Micro
proc
esse
ur
+Po
rts
Microprocesseur, mémoires et ports sont des composants.
Microcontrôleur
microprocesseur + mémoires + ports + ...
intégrés dans le même boîtier15
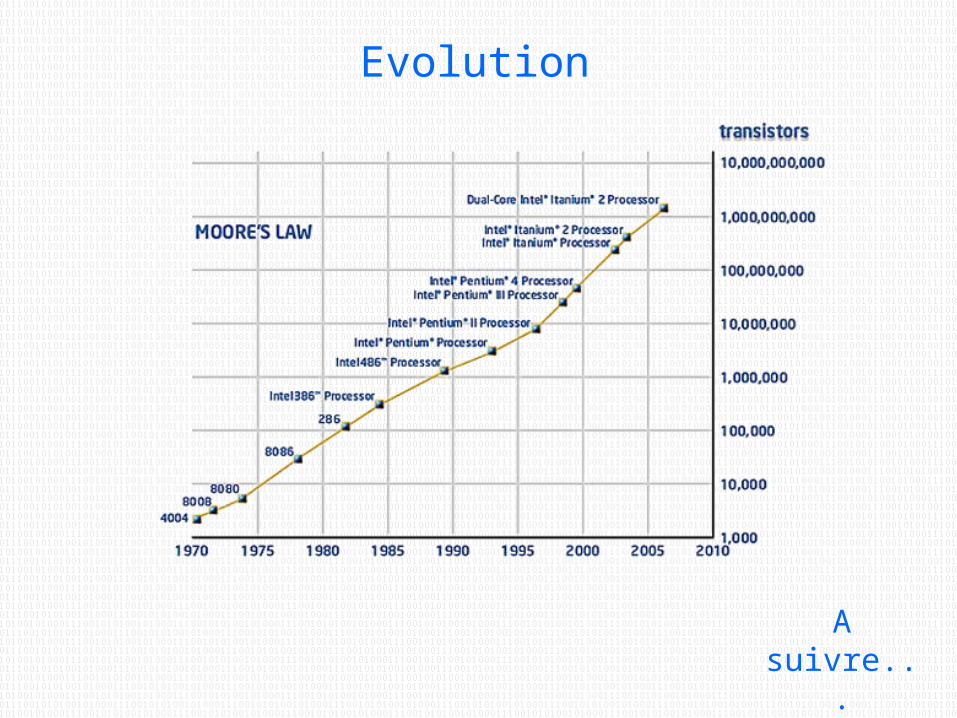
Evolution
A suivre...