Embed Size (px)
Citation preview

Architectures de réseaux de neurones

Rappels

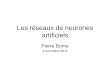
Exemple d’architecture feed-forward
X1
X2
U1
U2
U3
V1
V2
Y
w11
w12
w13
w14
w21
w22
w23
w24
w31
w32
NB: les offsets et les fonctions d’activation sur les neurones cachéset de sorties ne sont pas représentés dans cet exposé mais font biensûr partie des modèles.

Principe des réseaux feed-forward
L’information se propage des neurones d’entrée aux neurones desortie de la façon suivante:
1. Chaque neurone de la couche k résume les messages qu’ilreçoit de la couche k − 1 via une combinaison linéaire;
2. Il applique au résultat une fonction déterminée à l’avance(fonction d’activation), généralement non linéaire;
3. Il renvoie le résultat aux neurones de la couche k + 1 auxquelsil est connecté.

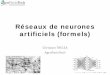
Exemple d’architecture feed-forward
I On choisit la fonction d’activation RELU(x) = max(0, x) surles neurones internes de
X1
X2
U1
U2
U3
V1
V2
Y
w11
w12
w13
w14
w21
w22
w23
w24
w31
w32
Iy(x1, x2) = max(0, w32v1 + w31v2 + b3) u1 = max(0, w11u1 + b11)
v1 = max(0, w21u1 + w22u2 + b21) u2 = max(0, w12x1 + w13x2 + b12)v2 = max(0, w23u2 + w24u3 + b22) u3 = max(0, w14x2 + b13)

Phase d’apprentissage: Fonction de perte
On cherche la valeur des paramètres qui minimisent une fonction deperte sur l’ensemble d’apprentissage, par exemple
L(w) =∑
i(yi(w)− yi)2
ou
L(w) = −∑
iyi log yi(w) (pour la classification)
où yi(w) désigne la prédiction pour l’individu i et yi la vraie valeur.

Phase d’apprentissage: Algorithme de la descente degradient
I On considère une fonction f à une ou plusieurs variablesx1, . . . , xk qu’on cherche à minimiser.
I Le gradient de f en x = (x1, . . . , xn) est le vecteur
∇f (x) =
∂f∂x1
(x)...
∂f∂xk
(x)
I le calculer en un point peut se faire en utilisant soit l’expression
de la dérivée partielle, ou en l’approximant par un tauxd’accroissement.

Descente de gradient
Algorithme1. On fixe ε > 0.2. Tant que ‖∇f (x)‖ > ε
xk+1 = xk − αk∇f (x)
I Plusieurs choix de la suite αk sont possibles. Des valeurs tropgrandes donnent un algorithme oscillant, des valeurs tropfaibles une convergence trop lente.
I Principaux avantages: simplicité et efficacité, la solution estexacte si la fonction à optimiser est convexe.
I Principal inconvénient: le minimum atteint n’est à priori quelocal.

Cas des réseaux de neurones
Si L(x) = L(h1(x), . . . , hn(x)),
∂L∂x =
n∑j=1
∂L∂hj
∂hj∂x
I La structure en couche des réseaux de neurones permet alorsde calculer le gradient suivant les paramètres et variables dechaque couche uniquement en fonction de la couche suivante(cf TD5). On parle de backpropagation.
I La formule liant le gradient d’intérêt à celle de la couchesuivante ne dépend que de l’architecture locale entre les deuxcouches: pas besoin de refaire toutes les maths à chaque fois.

Descente de gradient: gestion des données
Des variations sur la direction de la descente sont généralementutilisées, en particulier un algorithme de descente partielle:
I les données sont partitionnées en batchs et on utilise qu’unbatch à la fois pour faire un pas.
I quand tous les batchs ont été utilisés, on parle d’une époque(epoch). On repartitionne aléatoirement en batchs et onrecommence
I la détermination du nombre de pas se fait en général enprécisant la taille des batchs et le nombre d’époques

Remarques
I Les réseaux de neurones sont sur-paramétrés: les minimauxlocaux sont nombreux. La prédiction est bonne si l’ensembled’apprentissage est grand (erreur petite) mais les poids sontdifficilement interprétables en tant que tels (d’autres jeux depoids donnent des résultats similaires).
I La prédiction n’est bonne que dans les zones où il y avait desdonnées d’apprentissage.

Convolutional Neural Networks (CNN)
Traitement d’images
Les données d’entrée peuvent être très grandes (une image contientdes dizaines de milliers de pixels):
I Entraîner des réseaux denses peut être beucoup trop long:peut-on réduire les paramètres
Les données d’entrée peuvent avoir des invariances(rotation/translation):
I Traiter les différentes zones de l’image de manière égale
Pour répondre à ces questions, deux types de couches sontfréquemment utilisées en traitiment d’images: la convolution et lepooling

Convolution
I on applique un filtre de petite taille à chaque pixel d’unematrice de données. Par exemple, convoler avec le filtre
15
0 1 01 1 10 1 0
revient à remplacer chaque pixel avec sa moyenne avec les quatrespixels directement adjacents.
I rdv sur le site suivant pour des exemples de filtre et lavisualisation de leurs effets:
https://setosa.io/ev/image-kernels/

Convolution
I la convolution revient à ajouter une couche à un réseau deneurones, telle que1. La plupart des poids sont nuls: pour un filtre 3× 3, seules 9
poids sur les nxm possibles sont non nuls
2. Les neufs poids non nuls sont les mêmes pour tous les pixels: onpasse d’une couche n ×m à une autre couche n ×m avecseulement r2 paramètres où r est la taille du filtre
3. On limite le nimbre de paramètres, tout en assurant l’invariance
I les bords sont traités de façon à ne pas changer la taille de lanouvelle matrice (en ajoutant une couronne de 0 par exemple)

Convolution
I En image couleur, on n’a pas une seule matrice d’entrée, mais3 (RVB). On parle donc aussi de profondeur des données.
I Plusieurs noyaux de convolution sont autorisés en parallèle: sion laisse le réseau apprendre N filtres, qui s’appliquent chacunsur chacune des p tranches de la couche précédente, on obtientà la couche suivante des données de profondeur Np.
Exemple: si la première couche appliquée au jeu d’entrée (uneimage couleur de taille n ×m) est composée de 5 filtres, lesvariables après la première couche sont de taille n ×m × 15.

Pooling
Une couche de pooling diminue la taille du jeu de données par 2
I on partitionne l’image en carrés 2x2
I chaque carré devient une unique valeur, en appliquant unefonction de pooling: max (le plus fréquent), moyenne, . . .
Exemple de max-pooling
4 2 −4 −10 −1 −6 00 3 2 6−4 1 −1 −6
−→(4 03 6
)

Exemple
I Réseau convolutionnel de classification d’images de Symonianet Zisserman (2014).

Exemples d’applications
I Classification d’images, par exemple à des fins médicales
I Reconnaissance de formes (imagerie médicale, voitureautonome, imagerie satellitaire . . . )

Recurrent Neural Networks (RNN) et (LTSM)
Traitement du langageComment prendre en compte les mots précédents et le contexte?
I introduire la notion de série temporelle dans les données àtraiter
Exemple: Jean et Marie se promènent en forêt. Dans les sous-bois,Jean aperçoit une biche et la montre à ______
Quel mot proposer? Pour un modèle de Markov basé sur des milliersde mots, la dernière occurence de Marie est beaucoup trop lointaine.

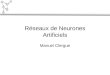
Réseaux récurrents
I On considère une cellule qui se répète et où yt (par exemple lemot suivant) dépend d’un ensemble de neurones cachés,eux-mêmes dépendant xt (par exemple le dernier mot) et desneurones cachés du temps précédent.
ht−1 ht ht+1
xt−1 xt xt+1
yt−1 yt yt+1
Whh WhhWhh Whh
Wxh
Why
Wxh
Why
Wxh
Why

Réseaux récurrents
I Les matrices de poids W entre les couches cachées, les offsetset les fonctions d’activation sont invariantes
I On représente par conséquent parfois ces réseaux sous uneforme plus compacte
hx yWxh Why
Whh

Vanishing gradientsLa formule des gradients donne
∂yt∂W =
∑i≤n
∂yt∂ht
∂ht∂hi
∂hi∂W
et
∂yt∂xi
= ∂yt∂ht
∂ht∂hi
∂hi∂xi
Or ∂ht∂hi
contient t − i fois le produit par la matrice W , ce quientraîne:
I soit l’explosion du gradient (qui peut être maîtrisée en lenormalisant)
I soit sa diminution rapide vers 0, entraînant une portéerelativement faible du mot xi sur les prévisions suivantes

Long Short Term Memories (LSTM) networks
Complexification de l’architecture des RNN en introduisant deuxprobabilités (σ désigne la fonction logistique ou sigmoïde 1
1+e−x ):
I update gate:
zt = σ(Wxzxt + Whzht−1)
I reset gate:rt = σ(Wxr xt + Whr ht−1)

Long Short Term Memories (LSTM) networks
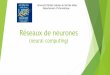
La définition de ht en fonction de ht−1 et xt se fait alors en deuxtemps (∗ désigne la multiplication termes à termes)
1. Opération habituelle avec le passé oublié suivant la probabilitéapprise par le reset gate
ht = tanh(Whxxt + rt ∗Whhht−1)
2. Mélange de l’état précédent et du nouveau avec une proportiondépendant de l’update gate
ht = zt ∗ ht−1 + (1− zt) ∗ ht
Remarque: Un reset faible et un update fort permettent d’avoirdes effets à long terme.

Graphe de l’architecture
ht−1
xt
rt
zt
ht
ht
Wxz
Whz
Wxr
Whr Whh
Wxh

Generative Adversarial Networks (GAN)
I Introduits par Goodfellow et al. (2014). Réseaux de neuronespour un cadre non supervisé.
I Révolution dans le monde des réseaux de neurones: un réseaupeut servir pour générer des données, pas seulement pour lesanalyser.
I Réseaux constitués de deux sous-réseaux: le générateur et lediscriminant
I Le but est d’entraîner le générateur pour qu’il génère desdonnées que le discriminant ne pourra pas distinguer desdonnées réelles.

Architecture des GAN
xrand
xobs
xgan
ydisc
Generator
Disc
riminator

Principe
I Une fonction de perte (typiquement crossentropy) est associéeau vecteur de sortie à deux coordonnées ydisc
I La boucle suivante est répétée un grand nombre de fois (lamise à jour des poids désignant un ou plusieurs pas de ladescente de gradients)
1. Les labels (considérés comme les observations pas lediscriminateur) de xobs sont mis à 1, ceux de xgan sont mis à 0,et seul le discriminateur est mis à jour.
2. Les labels de xobs et de xgan sont mis à 1, les coefficients dudiscriminateur sont gelés, et une mise de tout le réseau estfaite (ce qui revient à ne changer que le générateur).
La sortie finale est xgan.

Intuition
Etape 2: Mise à jour du générateur Comme la partie aval (lediscriminateur) est commune entre xreal et xgan et figée, et que cesdeux vecteurs ont les mêmes labels, la perte sera d’autant plusfaible que les vecteurs sont semblables.
On entraîne le faux-monnayeur à tromper le policier
Etape 1: Mise à jour du discriminateur On permet audiscriminateur de s’adapter au changement fait par le générateurpour continuer à faire la différence entre les deux vecteurs, ce quiobligera le générateur à s’améliorer au prochain pas.
Le policier s’adapte à la dernière version de la fausse monnaie

Exemples d’applications
I Transformation d’images (mélanges d’images, ajout oueffacement)
I Jumeau numérique en santé: réseaux réagissant comme desorganes