-
8/9/2019 Beltrami 2003
1/6
AFR control in SI engine w ith neural prediction of cylinder air
mass
C. Beltrami', Y. Chamaillard , G. Millerioux', P.
Higelin**
nd G. Bloch'
Centre de Recherche en Automatique de Nancy (CRAN, UM R CN RS
7039)
ESSTIN, 2 rue Jean Lamour, 545 19 Vandoeuvre les Nancy Cedex,
France.
[email protected]
..
Laboratoire d e Mecanique etd'Energitique (LME,
EA 1206)
ESEM, 8 rue Leonard de Vinci, 45072 Orleans Cedex 2, France.
[email protected]
Abstract
Accurate Air-Fuel Ratio (AFR) control in a spark-
ignition engine is
a
critical point to satisfy pollutant
emission legislation. Using
a
three-way catalytic
converter with an electronic fuel injection, today's most
effective solution, requires the regulation of the cylinder
AFR in a narrow band around the stoichiometric
conditions during both steady and transient engine
operation to be efficient.
AFR control depends essentially on prediction of the air
mass to be admitted. In this paper, the building of an air
mass predictive neural network is described and its
performances are evaluated. Using this predictor in
addition with transient fuel film compensation for AFR
control allows to drastically reduce the AFR excursions
during fast transients.
Keywords
air-fuel ratio, event-based control, prediction, neural
network.
1. Introduction
In today 's spark ignition engines, three-way catalysts are
used to reduce the exhaust emission of the three main
pollutants that are: unburned hydrocarbons (HC), carbon
monoxide (CO) and nitrogen oxides (NOx). The
optimization of the three-way catalyst efficiency requires
the cylinder Air-Fuel Ratio (AFR) to be kept in
a
narrow
band which corresponds to the stoichiometric conditions
[6].
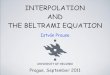
igure 1 describes the catalytic conversion efficiency
for the three main pollutants versus the in-cylinder
mixture AFR. Even a small deviation from
stoichiometric conditions can result in
a
dramatic
degradation o f the conversion efficiency.
A modern engine control unit , as the ones commonly
installed on new vehicles, handles this AFR regulation
task very well under steady state conditions [4]. It
provides the injection controller with a prediction
of
the
air mass to be admitted in the cylinder and uses a
0-7803-7896-2/03/ 17.00
2003
EEE
Universal Exhaust Gas Oxygen (UEGO) sensor in the
exhaust flow for the AFR measurement to allow a
possible bias to be corrected by feedback.
The control problem becomes more difficult in transient
phases because of the m ore d ifficult prediction of the air
mass, the fuel flow dynamics and the inherent delay in
the feedback system. This results in AFR excursions
during fast transients, and so increased pollutant
emissions. A lot of work has been perform ed in the topic
of air mass prediction [9] [ I l l [I61 and fuel film
dynamics [ I ] [3]
[7]
to improve A FR control.
Air-Fuel Ratio
AFR)
FIG.
1:
Catalytic converter efficiency
Th e AFR is defined as the ratio between the air mass and
the fuel mass admitted into the cylinder. These variables
are not accessible for measurement but depend
essentially (though dynamic systems) on throttle angle
and injection duration.
In
a
first part, a description of the two sub-systems, fuel
and air dynamics, involved in the AFR determination is
provided to understand the process. The AFR control
method is then detailed and
the
air mass prediction issue
developed. Finally, a solution using a neural air mass
predictor, with a physical model based structure, in
addition to transient fuel film compensation, is proposed
and evaluated.
1404
Proceedings
01
the American Control Conference
Denver,
Colorado June
46 2003
mailto:[email protected]:[email protected]:[email protected]:[email protected]
-
8/9/2019 Beltrami 2003
2/6
2. Engine model
The
simulations are performed on a non-linear fuel-
injected, mean-value and event-based model.
Computation is performed at each,T op Dead Center. The
engine m odel includes the engine (fuel flow dynamics,
air
mass
flow dynamics, combustion and delays inherent
to four-stroke engines), actuators, sensors and a dynam ic
model of the load. This model is representative of a
classical four cylinders
1.4
liter engine.
2.1.
Fuel dynamics
The fuel flow sub-model describes the fuel transport
from injection location to intake port. A two phase fuel
flow occurs in the intake manifold, with a thin film of
fuel on the manifold walls and droplets transported by
the main stream of air and fuel
[ I ] .
It
is
worth
emphasizing that the fuel film dynamic model is non-
linear in spite of its linear form. Indeed, the parameter
values depend on the engine operation states and are not
constant. Moreover their identification
is
relatively
complex.
It is assumed that at any time there are uniform
conditions in the intake manifold and that a fraction X of
the injected fuel is deposited on the wall as liquid film.
The evaporation is considered proportional to the mass
of the fuel film. The phenomena can he described by a
model with two time constants
[7]:
1
T
m, =-[-mfi+ l-x)m,)] ( 2 )
m
=
m +m s 3)
with mg fuel film mass flo w (kgkec),
mp injected fuel mass flow (kg/sec),
m,
fuel vapor mass f low (kdse c) ,
mf
cylinder port fuel mass flow (kgisec),
x
fraction of injected fuel deposited as fuel film,
z,
fuel vapor time constant (sec)
and
ry
fuel film time co nstant (sec).
In an injection system the vapor time constant r, can
usualIy be neglected with respect to the fuel film time
constant
zr
and equation
( 2 )
becomes:
Hence, the global equivalent transfer function that links
the fuel mass injected and the fuel mass admitted can be
described by:
5 )
From
3)
and
(4),
an ideal compensation for the
simplified model can he obtained:
m , = I - X ) k ,
4)
Mf s )
=
l + l - X ) z p
M j i W I+r f s
1
1-x
f i
=- m p -6,j-I ( 6 )
where m, is the desired fuel mass flow and
iff
he fuel
film mass flow estimation defined as in I ) by:
m g =-(-Gg
+Xm,)
1
z/
Linear compensation based on the equations above
cannot he achieved to give optimal compensation over
the entire operating range of an engine, especially
in
transient condition. This fact has been pointed out
in
several earlier publications and is very important in
practical applications
[7].
However, the compensation
presented above permits to sensibly reduce the fuel
dynamics effect on AFR and
so,
to better a ppreciate the
air estimation effects.
2.2. Air dynamics
The air intake sub-model describes the air mass flow
from the throttle to the cylinder port [ 2 ] .The only input
which can he controlled is the throttle angle that
modifies the intake manifold pressure:
dP 0
t = a Sthr(t) f s V P t ) / Putm)
( 8 4
(8h)
here a=-----Jp-- and f l =
30 Mu Vmun
-
Ne@ PltJ
f@ t), Ne(t).Ta)
y
R
Tu
Putm
Ma
Vmun R Tu
y R Ta
with P t)
Sthr(t)
Wt
W O
f a 0
Patm
Tu
Vmun
and b R . M a
manifold pressure (Pa),
effectiv e throttle s ection (m'),
engine speed (rpm),
Saint-Venant function,
filling function,
atmospheric pressure (Pa),
air temperature K),
manifold volume (m3),
thermodynamic constants.
The first term of (Sa) corresponds to the entering flow
from the throttle. The second term represents the exiting
flow that is admitted into the cylinder and depen ds
essentially on manifold pressure and engine speed. The
air dynamics is fairly com plex and non-linear, and
is
a
central problem in AF R regulation
2.3. Event-based model
A closer
look
at the engine processes shows that the
operations divide the physical processes into four distinct
regimes corresponding to the four events: intake,
compression, power and exhaust, and suggests an event-
based app roach according to the crank angle.
As a
result, the characteristic behavior
of
an engine
consists of a combination of two types of dynamics:
time-based and event-based. Event-based dynamics are
described in the crank angle domain. From the engine
control point of view, only one value
of
AFR exists at
each cycle for each cylinder, and the outputs of an
engine control system are synchronous with crank angle.
Hence, the fundamental sampling period
Te,
constant
in
7)
Proceedings Of the
American Control
Conference
1405 Denver,
Colorado
June 46.2003
-
8/9/2019 Beltrami 2003
3/6
-
8/9/2019 Beltrami 2003
4/6
4.2.
T h e
neural
model
As the v ariable to be estimated, here the air m ass, is not
measured, a simulation model, involving outputs
predicted by the model in the regression vector, is
needed. Hence, a Neural Output
Error
model
WOE)
i s
used. To predict j ( k ), he air mass to be admitted at
discrete time
k,
the following regressors have been
chosen:
Air mass prediction at
(k
) , $(k - ,
Manifold pressure
P k - )
and
P k - ) ,
Engine speed Ne(k - ),
Throttle angle reference Th+@(i),
i
=
k-l.k-b... k-6
.
This choice is clearly based on physical equations
8),
which involve a s dynamical inpu ts the ma nifold pressure
P o ) ,
effective throttle section
Sthr(t)
and engine speed
Ne(?). Including
P k
-
)
and P k
-
2) reflects the
presence of P(t) time derivative in 8). The engine
speed, beyond its role in air admission m odel, permits to
handle the variable sampling period
Te
issue. The last
regressors allow the prediction thanks to the delay
present in the throttle actuator which is aro und
30
ms. At
6000 rpm, the sampling period
is 5
ms and 6 samples are
then necessary. The same choice is m ade in [ I I] . The use
of a rapid throttle could reduce the delay and
so
the
number of regressors.
Training was performed by minimizing the mean
squared error function, with the Levenherg-Marquardt
method implemented in a specific Matlab toolbox
[15].
The different signals involved in training the network
should have been scaled to avoid saturation. A hidden
layer of n
=
14
neurons (see eq.
12)
was selected to
reach a good prediction accuracy.
The training data set was obtained by simulating the
engine on a large range of operation. The torque
reference signal consisted of steps of random length and
size, to which was added up a random step signal with
length and amp litude divided by IO, as shown figure 4.
in AFR regulation. A solution for air prediction is
proposed in the following section.
4 Neural air mass prediction
4.1.
In t roduc t ion
As the AFR m easurement presents a delay and the sensor
dynamics is slow with respect to the variation to he
detected during transient phases, a feedforward control
seems to be the solution during transients. For such a
scheme, the AFR regulation quality depends essentially
on the prediction of the air mass to be adm itted. From the
physical model of the air admission dynamics, given by
S), the goal is to obtain a discrete event-based model of
the air admission in order to predict the air mass
f low
to
be admitted in the cylinder. The delay between the angle
reference and the actual throttle position can be used to
develop an air charge anticipation algorithm. Magner a nd
Jankovic
2002)
develop such a solution using a neural
predictor [Ill . Other works [SI
[lo] [I21
already used
neural networks to optimize AFR control.
Because of their ability to represent complex non-linear
mappings with good flexibility and accuracy, neural
networks have become popular to model various
subsystems as discrete black boxes
[13]
[14].
As parsimonious and flexible universal approximator,
the on e hidden layer perceptron w ith linear output unit is
used here. Its form is given, for single output f ,by:
where pj, = I ; . . , p , are the inputs of the network,
wki
and
b k ,
k = f : . . , n ,
j = f : . . p
are the weights
and biases
of
the hidden layer, the activation function
g
is
a
sigmoid function, chosen here
as
often as the
hyperbolic tangent, 4 , = I ; . . , n , and bZ are the
weights and b ias of the outpu t neuron or node.
The non linear model ( 1 1 ) can be used as discrete
dynamical predictor of a variable
y :
where p k)= [pl(k)pz(k)...pp(k)P is the regression
vector and the parameter vector
B
is the concatenation
of all the weights w and biases
b .
Depending on the
choice o f the regressors in p@), ifferent models can be
derived.
m = f m ) , e 8 ) 13)
FIG.4 : Engine torque reference (daN .m) vs. time (sec)
The whole engine operation range
for
different engine
speeds was covered. The speed reference signal was
Proceedings of the American Contml Conference
Denver, Colorado June
4-6, 2003
407
-
8/9/2019 Beltrami 2003
5/6
varying from
1000
to 6000 rpm by step of 1000 rpm. As
the sampling period depends on the engine speed, the
step duration varied with th e speed reference
to
keep the
same learning points nu mber fo r each level.
5. Results
Two simulation scenarios can be considered for
validation: the engine speed scenario and the torque
scenario. In [4], it is shown that transients in torque are
the most disturbing. So the torque scenario is used here
for comp arison.
The main task was to obtain an air mass predictor in
order to enhance AFR control in transient phases. As the
transient fuel dynamics compensation was not the main
problem, results will be compared with the same fuel
admission corrected (in simulation) by the ideal
compensation 6) and
7).
Different simulations have been performed to test the
neural air mass predictor. The torque reference
represented on figure
5
is chosen to generate fast throttle
angle variations and thus rapid transient phases.
FIG. 5 : Torque refere nce (daN.m) vs. time (sec)
That signal is used with differe nt engine speed references
from 1000 to 6500 rpm by
500
rpm step to compare the
results with data similar but different from the learning
set. The simulations have been done with the ideal fuel
film compensation and a PI controller on AFR
measurement (in the AFR controller - figure 3) to avoid
bias.
The test results
of
the on e step ahead neural predictor are
reported in table 1. The engine speed reference value
used with the torque reference is reported in the first
row. The Root Mean Square Error (RMSE) values for
the air mass prediction with a traditional method (Air-t)
(prediction by a volumetric efficiency map from
estimated manifold pressure, given by I
I ,
and engine
speed) and for the neural prediction (Air-nn) are
reported in the second and third rows. The last two rows
give the RMSE on AFR control results with traditional
(AFR-t) and neural (AFR-nn) predictions.
Table I - Results
The results show that the neural prediction leads to a
very significant improvement in AFR control thanks tn
its better prediction of the air mass to be admitted. The
neural network interpolates the learning data very well,
hut, for extrapolatio n, the performan ces fall dow n
compared to traditional method (at 6500 rpm for
example).
Results at
3500
rpm are shown in figures 6 and 7, during
only 3 seconds to better illu strate the differences. Figure
6
shows the neural air mass prediction compared to the
real (simulated) air mass. It can he noticed that the
prediction errnr is very weak and the real and predicted
air masses are difficult to distinguish
Real air
mass
Neural prediction
redictionerror
I
1.5 8 1 8
8 5
10
FIG.
6 :
Predicted and real air mass (mg)
vs.
time (sec)
As previously mentioned, the good capability of the air
mass neural predictor allows to significantly enh ance the
AFR control. Figure
7
shows a comparison between the
AFR excursion with the traditional air mass flow
predictor (AFR-t) and the neural on e (AFR-nn).
In
all cases the AFR excursions are reduced (by
50%)
especially for high excursions, which are the most
problematic for consumption, agreement and pollutant.
However the static error compensation is rather slower
because the feedback controller has not been redefined.
Proceedingsof the American
Conlrol Conference
~enver
oioraao ne 4-6,
zw3
408
-
8/9/2019 Beltrami 2003
6/6
7 s 1 5 8 9 5 10
FIG. 7: Com parison ofth e AFR errors vs. time (sec)
6 . Conclusion
The need of an accurate prediction of the air mass to b e
admitted in the cylinder has been emphasized in the
framework of AFR control. A neural network can be
built and trained to provide a good dynamical air mass
prediction, much better than the prediction based on
classic observer and static volumetric efficiency map.
The neural predictor makes complete use of the delay in
the throttle actuator. For operating points inside the
learning domain, the neural network interpolates very
accurately.
A solution combining this neural air mass one step ahead
predictor and a transient fuel film compensation has been
proposed for AFR control. The results show that the
AFR excursions are drastically reduced on rapid torque
transients
if
the inputdoutputs
of
the air admission can
be correctly collected. It appears also that the feedback
controller must be redefined to optimize static error
compensation.
Although the neural dyn amical prediction of cylinder air
mass greatly improves the AFR control, further works
must be com pleted
for
application to handle the data set
collection and the system non-stationarity over time.
References
1. Arsie, C. Pianese,
G .
Rizzo, and V . Cioffi. An
adaptive estimator
of
fuel film dynamics in the
intake port of a spark ignition engine. 3 ' IFAC
Workshop Advances in Automotive Control,
pp,
293-298, Karlsruhe, Germany, 2001.
P. Anthoine and A. Dauron (1993). Dtpollution des
moteurs a essence: regulation de richesse avec
sonde proportionnelle et actionneur papillon.
Automatiquepour
les
vihicules, pp. 57-72, Amiens,
France, 1993.
M. Behnia and B.E. Milton. Fundamentals
of
fuel
film formation and motion
in
spark ignition engine
induction systems.
Energy Conversion. and
Management, 42,
1751-1768,2001.
Y . Chamaillard and C . Pem er. Air-fuel ratio control
by fuzzy logic, preliminary investigation. 3'd IFAC
Workshop Advances in Automotive Control, pp.
221-226, Karlsruhe, Germany, 2001.
C.F. Chang, ,N.P. Fekete, and
J.D.
Powell. Engine
air-fuel ratio control using an event-based observer.
SAE Paper 93 0766, Detroit, MI, 1993.
[6] R.M. Heck and
R.J. Farrauto. Automobile exhaust
catalysts.
Applied Catalysis, A : General, 221,
443-
457,2001.
[7] E. Hendricks, T. Vesterholm, P. Kaidantzis,
P.
Rasmussen, and
M.
Jensen. Nonlinear Transient
Fuel Film Compensation (NTFC).
SAE Paper
930767, Detroit, MI, 1993.
[8] R.J. How lett, S.D. alters, P.A. Howson, and L.A.
Park. Air-fuel ratio measurement in an internal
combustion engine using a neural network.
Advances in vehicle control and safety,
Amiens,
France, 1998.
M. Jankovic and S. Magner. Cylinder air-charge
estimation for advanced intake valve operation in
variable cam timing engines.
JSAE, 22,
445-452,
2001.
[IO] N. Li,
K. Li
and S. Thompson. Employing a new
type of neural network to optimise power plant air-
fuel ratio.
141h IFAC Triennial World Congress,
pp.
333-338, Beijing, China, 1999.
[ I l l S. Magner and M. Jankovic. Delta air charge
anticipation for mass air flow and electronic throttle
control based systems.
American Control
Conference,
pp. 1407-1412 , Anchorag e, AK, 2002.
[I21 M.
Majors, J.A. Stori, and D. ho (1994). Neural
network control of automotive fuel injection
systems. IEEE Conirol Systems Magazine, 14 3),
31-36, 1994
[I31
K.S.
Narendraand K. Parthasarathy. Identification
and control of dynamical systems using neural
networks. IEEE
Trans. on Neural Networks,
1(1),
4-27, 1990.
[I41 M. Norgaard, 0 Ravn, N.K. Poulsen and L.K.
Hansen.
Neural networks for modeling and control
of dynamic systems. Springer, 2000.
[I51 M. Norgaard. Neural Network Based System
Identification Toolbo x. Technical Report 95-E-7 73;
Institute of Automation, Technical University of
Denmark, 1995.
1161 R.W. Weeks and
J J
Moskwa. Transient airflow
rate estimation in a natural gas engine using a non-
linear observer.
SAE Paper 940759,
1994
[5]
[9]
Proceedings
of
the
American
Control
Conterence
Denver. Colorado June
4.62003
409






![Applicazioni di rete a.a. 2003-2003 · 2003. 2. 27. · 1 Applicazioni di Rete – M. Ribaudo - DISI Applicazioni di rete a.a. 2003-2003 [terzo anno nuovo ordinamento] Marina Ribaudo](https://img.pdfslide.fr/doc/110x75/5fc27efd742f12763c26377e/applicazioni-di-rete-aa-2003-2003-2003-2-27-1-applicazioni-di-rete-a-m.jpg)