Cinmatique
Chapitre 3 Robotique (Modlisation cinmatique)
Chapitre 3 Modlisation Diffrentielle
cinmatique simple3.1 IntroductionLe MDD se base sur le calcul
variationnel, il permet de dcrire les variations lmentaires des
coordonnes oprationnelles en fonction des variations lmentaires des
coordonnes articulaires.Les intrts du modle diffrentiel direct
sont:
Le calcul du MDI permet de raliser une commande cinmatique
locale.
En calculant les drives aux lieu des diffrentielles on peut
dterminer les vitesses oprationnelles en fonction des vitesses
articulaires.
Le calcul des singularits est facile.3.1 Modle diffrentiel
direct (MDD)
3.1.1 Mthodes de calcul du MDD
Le modle diffrentiel direct est dcrit par lquation:
dx=J(q).dq ou J(q) est appel Jacobien.Parmi les mthodes
permettant le calcul de J(q) on dcrit la mthode de propagation de
la vitesse et la mthode du Jacobien de base.
A- Mthode de propagation de la vitesse
La dtermination du Jacobien consiste calculer les vitesses
linaires et angulaires en fonction des vitesses articulaires, les
calculs se propagent de la base vers leffecteur.Chaque lment du
robot manipulateur est suppos rigide, son mouvement est dcrit par
les vecteurs des vitesses angulaires et linaires. Ces vitesses
seront dcrites dans les repres associs aux articulations ensuite
dans le repre de base.
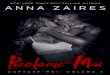
Fig 3.1 Vitesses des corps du robot.La vitesse angulaire de
llment (i+1) est gale celle de llment (i) plus la vitesse de
rotation au niveau de larticulation (i+1).
Si la vitesse de rotation de llment i+1 est dcrite dans le repre
Oi par lquation:
Elle sera dcrite dans le repre Oi+1 par lquation:
3.1
O : reprsente la matrice de rotation du repre Oi+1 par rapport
Oi.
Et
La vitesse linaire de lorigine du repre Oi+1 est la mme que
celle de lorigine du repre Oi plus une composante produite par la
vitesse de rotation de llment (i).
Si la vitesse linaire de lorigine du repre Oi+1 est dcrite dans
le repre Oi par:
3.2Elle sera dcrite dans le repre Oi+1 par:
Dans le cas des articulations prismatiques, les quations
prcdentes deviennent: 3.3
3.4Par des applications de ces quations successivement dun lment
un autre, on peut calculer et , vitesse angulaire et linaire du
dernier lment du robot manipulateur.
Si on dsire reprsenter ces vitesses dans le repre de base O0, on
doit prmultiplier leurs quations par la matrice de rotation .
3.5
Donc si
Alors 3.6Et J(q) est appel Jacobien.B- Mthode de Jacobien de
base
Cest une mthode de calcul direct base sur le calcul du Jacobien
entre les vecteurs de translation et de rotation diffrentiels (dn,
n ) du repre On et les diffrentielles des coordonnes articulaires
dq . 3.7 La contribution lmentaire de chaque articulation est donne
par:1- Articulation prismatique (k=1) 3.82- Articulation rotode
(k=0)
3.9O: ak: Vecteur unitaire port par laxe Zk de
larticulation.Lk.n: Vecteur reliant les origines des repres Ok et
On.
En appliquant la mthode de dcomposition des vitesses, on montre
quon peut additionner les contributions lmentaires de chaque
articulation pour dterminer les vecteurs de translation et de
rotation diffrentiels du repre terminal.
Donc sous forme matricielle, on a:
3.10Jn: est appel Jacobien vectoriel du robot manipulateur. La
projection de Jn dans le repre On nous donne le Jacobien scalaire
nJn donn par la matrice suivante:
3.11
Avec: 3.12
Articulation rotode Articulation prismatique Les lments s,n,a,p
appartiennent la matrice kTn .
Finalement, la matrice Jacobienne, est gale la projection de nJn
dans le repre de base O0:
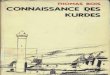
3.13Exemple 3.1Utiliser Les deux mthodes prcdentes pour calculer
le modle diffrentiel direct du robot manipulateur suivant(3R,
2R):
Fig .3.2 Bras manipulateur (3R,2R)Calcul du modle par la mthode
de propagation des vitesses:1re Etape: Calcul de 1w1, 2w2, 3w3,
4w4, 0w5.La formule qui donne iwi est comme suit:
Donc
2me Etape: Calcul de 1v1, 2v2, 3v3, 4v4, 5v5, 0v5
La formule qui donne les vitesses ivi est comme suit:
,
,
Alors le Jacobien J(q) est telque:
J(q): matrice (65).
Remarque: Le calcul du Jacobien par la mthode du Jacobien de
base expose ci-dessus donne les mmes rsultats. 3.2 Modle
diffrentiel inverse (MDI)
Lutilit du modle diffrentiel inverse est de calculer partir dune
configuration donne, la diffrentielle articulaire dq pour
satisfaire une diffrentielle des coordonnes oprationnelles dx.
Lintrt du modle diffrentiel rside dans sa linarit. De plus, il
permet de dterminer les vitesses articulaires qui assurent au repre
terminal une vitesse dsire. 3.2.1 Mthodes de calcul du modle
diffrentiel inverse
Les deux mthodes principales sont: La drivation des MGI et
linversion du modle diffrentiel direct.
La premire est une mthode analytique donnant tous les modles
diffrentiels inverses correspondant aux diffrents modles gomtriques
inverses.
La deuxime mthode est gnrale donnant le MDI par rsolution dun
systme dquations linaires, La solution est analytique (temps de
calcul faible) ou numrique (plus gnrale est important).
Lquation gnrale qui reprsente le MDI est comme suit:
3.14 3.2.1.1 Modle diffrentiel inverse dans le cas rgulier Dans
le cas rgulier le nombre de (d.d.l) de lespace de la tache est gale
au nombre darticulations du robot manipulateur (m=n) et la matrice
J est carre avec un dterminant non nul. Le modle diffrentiel
inverse est dtermin par le calcul de la matrice inverse
Si le robot possde six d.d.l avec un poigne de type rotule, la
matrice J prend la forme:
A et C matrices carres inversibles.
Alors:
Linversion de A et C est plus simple que linversion de J.d4
d3
x5
x4
Z4
Z3
x3
Z2
x2
O
z1
z0
x1
x0
Z5
PAGE 2
_1383460791.unknown
_1383483222.unknown
_1383485760.unknown
_1383550801.unknown
_1383555187.unknown
_1383555453.unknown
_1383556145.unknown
_1383555378.unknown
_1383551473.unknown
_1383555116.unknown
_1383548729.unknown
_1383548743.unknown
_1383548399.unknown
_1383548546.unknown
_1383485564.unknown
_1383485656.unknown
_1383485691.unknown
_1383485623.unknown
_1383485457.unknown
_1383485509.unknown
_1383484657.unknown
_1383484732.unknown
_1383484529.unknown
_1383464865.unknown
_1383482446.unknown
_1383483100.unknown
_1383483122.unknown
_1383483010.unknown
_1383468906.unknown
_1383482062.unknown
_1383465058.unknown
_1383463547.unknown
_1383464741.unknown
_1383464749.unknown
_1383463684.unknown
_1383462396.unknown
_1383462473.unknown
_1383462028.unknown
_1383456548.unknown
_1383459733.unknown
_1383460133.unknown
_1383460736.unknown
_1383459812.unknown
_1383459701.unknown
_1383459713.unknown
_1383459690.unknown
_1383459670.unknown
_1383455281.unknown
_1383456428.unknown
_1383455739.unknown
_1383456285.unknown
_1383391640.unknown
_1383391240.unknown
_1383391440.unknown