Embed Size (px)
Citation preview
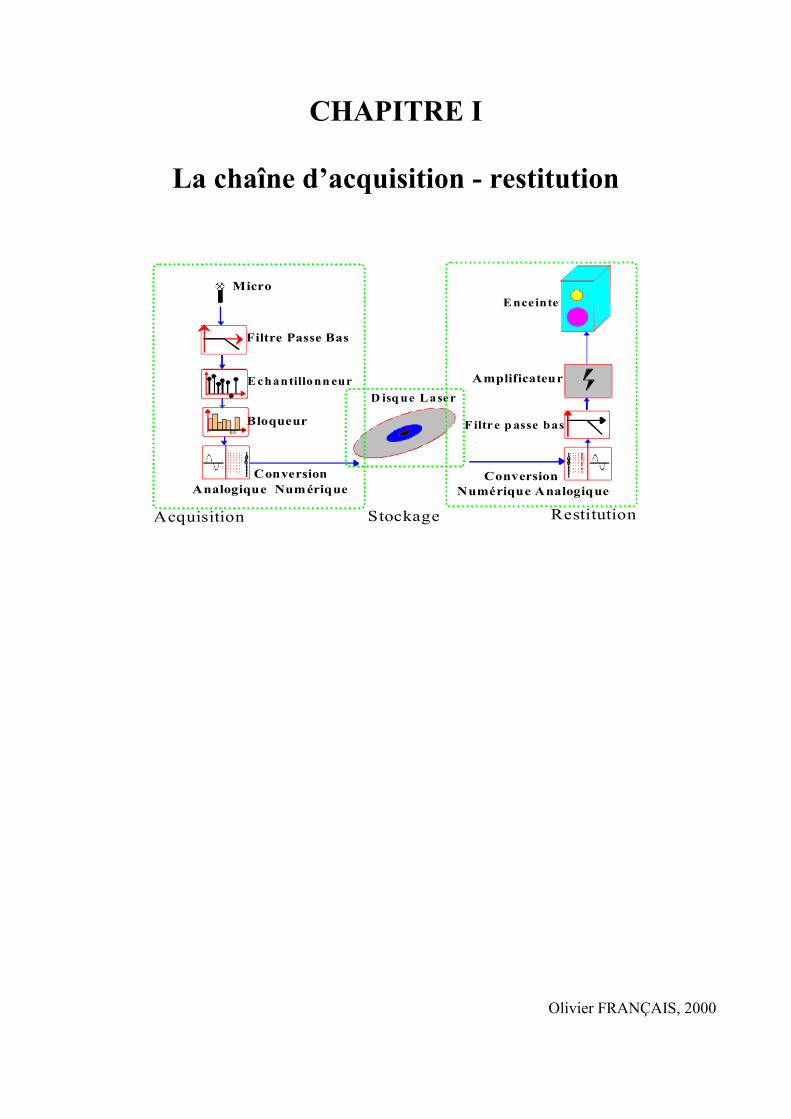
CHAPITRE I
La chaîne d’acquisition - restitution
10101111
Micro
Filtre Passe Bas
E chantillonn eur
Bloqueur F iltre p asse bas
Amplificateur
E nce inte
10101111 Conversion
Analogique Numérique ConversionNumérique Analogique
D isq ue Laser
Stockage RestitutionAcquisition
Olivier FRANÇAIS, 2000
Structure de la chaîne d’acquisition ESIEE
Acquisition de données I.2
SOMMAIRE
La chaîne d’acquisition - restitution
I PRINCIPE.......................................................................................................................................................................3
I.1 CAPTEUR ....................................................................................................................................................................3I.2 AMPLIFICATEUR DE SIGNAL........................................................................................................................................3I.3 FILTRE D’ENTRÉE .......................................................................................................................................................3I.4 L’ÉCHANTILLONNEUR ................................................................................................................................................3I.4 LE CONVERTISSEUR ANALOGIQUE NUMÉRIQUE (CAN)...............................................................................................4I.5 LA ZONE DE STOCKAGE...............................................................................................................................................4I.6 LE CONVERTISSEUR NUMÉRIQUE ANALOGIQUE (CNA)...............................................................................................4I.7 LE FILTRE DE SORTIE ..................................................................................................................................................4I.8 AMPLIFICATEUR DE PUISSANCE ..................................................................................................................................4I.9 PERFORMANCES GLOBALE..........................................................................................................................................4
II ACQUISITION DE PLUSIEURS GRANDEURS .....................................................................................................5
II.1 ACQUISITION SÉQUENTIELLE DÉCALÉE......................................................................................................................5II.2 ACQUISITION SÉQUENTIELLE SIMULTANÉE................................................................................................................5II.3 ACQUISITION PARALLÈLE..........................................................................................................................................6
Structure de la chaîne d’acquisition ESIEE
Acquisition de données I.3
Structure d’une chaîne d’acquisition numérique
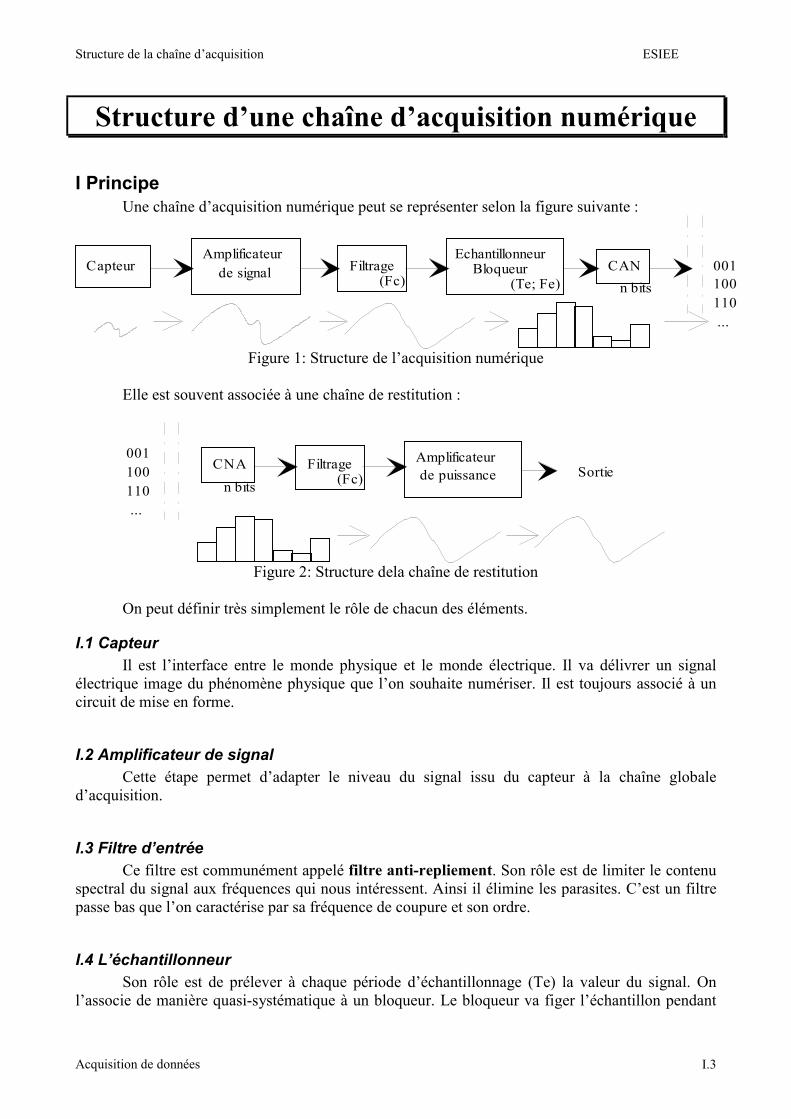
I PrincipeUne chaîne d’acquisition numérique peut se représenter selon la figure suivante :
CapteurAmplificateur de signal Filtrage
EchantillonneurBloqueur CAN 001
100110 ...
(Te; Fe)(Fc) n bits
Figure 1: Structure de l’acquisition numérique
Elle est souvent associée à une chaîne de restitution :
FiltrageCNA001100110 ...
(Fc)n bits
Amplificateur de puissance Sortie
Figure 2: Structure dela chaîne de restitution
On peut définir très simplement le rôle de chacun des éléments.
I.1 CapteurIl est l’interface entre le monde physique et le monde électrique. Il va délivrer un signal
électrique image du phénomène physique que l’on souhaite numériser. Il est toujours associé à uncircuit de mise en forme.
I.2 Amplificateur de signalCette étape permet d’adapter le niveau du signal issu du capteur à la chaîne globale
d’acquisition.
I.3 Filtre d’entréeCe filtre est communément appelé filtre anti-repliement. Son rôle est de limiter le contenu
spectral du signal aux fréquences qui nous intéressent. Ainsi il élimine les parasites. C’est un filtrepasse bas que l’on caractérise par sa fréquence de coupure et son ordre.
I.4 L’échantillonneurSon rôle est de prélever à chaque période d’échantillonnage (Te) la valeur du signal. On
l’associe de manière quasi-systématique à un bloqueur. Le bloqueur va figer l’échantillon pendant
Structure de la chaîne d’acquisition ESIEE
Acquisition de données I.4
le temps nécessaire à la conversion. Ainsi durant la phase de numérisation, la valeur de la tension del’échantillon reste constante assurant une conversion aussi juste que possible. On parled’échantillonneur bloqueur.
I.5 Le convertisseur analogique numérique (CAN)Il transforme la tension de l’échantillon (analogique) en un code binaire (numérique).
I.6 La zone de stockageElle peut être un support de traitement (DSP, ordinateur), un élément de sauvegarde (RAM,
Disque dur) ou encore une transmission vers un récepteur situé plus loin.
I.7 Le convertisseur numérique analogique (CNA)Il effectue l’opération inverse du CAN, il assure le passage du numérique vers l’analogique
en restituant une tension proportionnelle au code numérique.
I.8 Le filtre de sortieSon rôle est de « lisser » le signal de sortie pour ne restituer que le signal utile. Il a les
mêmes caractéristiques que le filtre d’entrée.
I.9 Amplificateur de puissanceIl adapte la sortie du filtre à la charge.
I.10 Performances globaleI.10.1 Fréquence de fonctionnement
On peut définir la vitesse limite d’acquisition. Elle va dépendre du temps pris pour effectuerles opérations de :
- Echantillonnage echT
- Conversion Tconv
- Stockage Tstock
Ainsi la somme de ces trois temps définit le temps minimum d’acquisition et donc lafréquence maximum de fonctionnement de la chaîne :
stockconvechacq TTTT ++= soit stockconvech
max TTT
1F
++=
I.10.2 Résolution de la chaîneLa numérisation d’un signal génère un code binaire sur N bits. On obtient donc une
précision de numérisation de %21 N .Il faut donc que tous les éléments de la chaîne de conversion aient au moins cette précision.
On leur demande en général une résolution absolue de (0.5* %21 N ).
Structure de la chaîne d’acquisition ESIEE
Acquisition de données I.5
II Acquisition de plusieurs grandeursDans le cadre d’une chaîne d’acquisition traitant plusieurs capteurs (N) vers une même zone
de stockage, il existe différentes structures qui différent en terme de performances et de coût.
N Capteurs ⇒ 1 zone de stockage (traitement) numérique
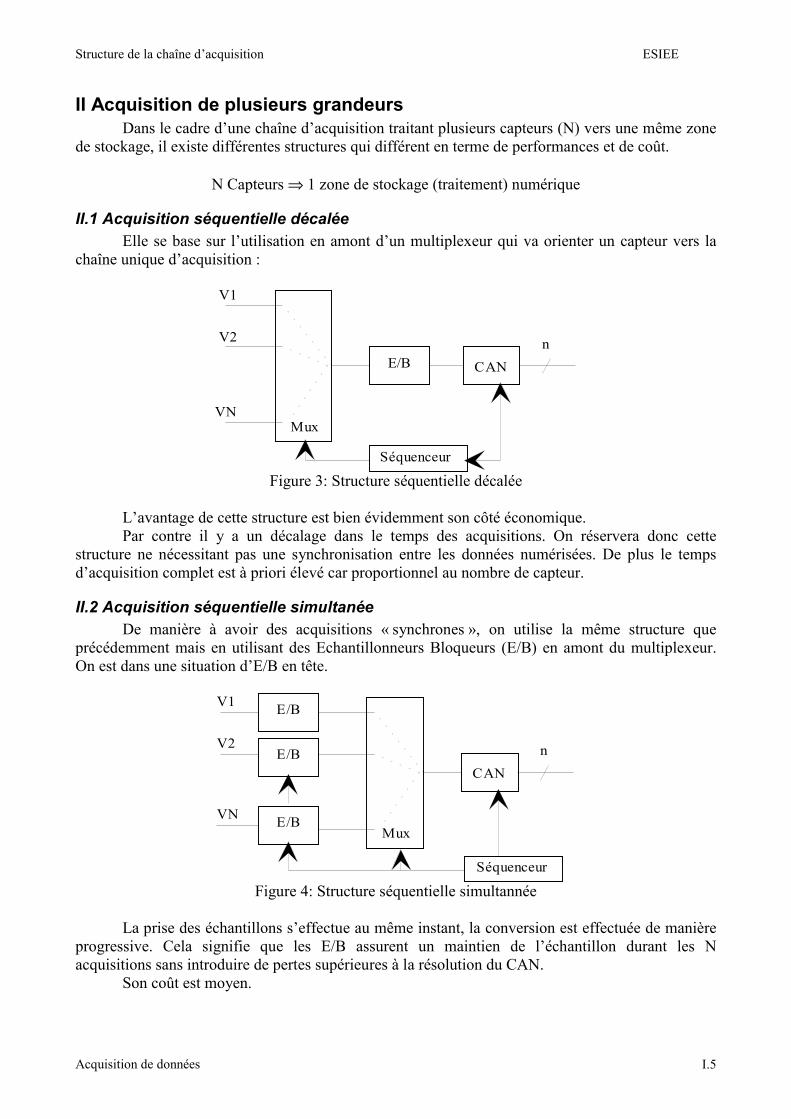
II.1 Acquisition séquentielle décaléeElle se base sur l’utilisation en amont d’un multiplexeur qui va orienter un capteur vers la
chaîne unique d’acquisition :
Mux
E/B CAN
Séquenceur
V1
V2
VN
n
Figure 3: Structure séquentielle décalée
L’avantage de cette structure est bien évidemment son côté économique.Par contre il y a un décalage dans le temps des acquisitions. On réservera donc cette
structure ne nécessitant pas une synchronisation entre les données numérisées. De plus le tempsd’acquisition complet est à priori élevé car proportionnel au nombre de capteur.
II.2 Acquisition séquentielle simultanéeDe manière à avoir des acquisitions « synchrones », on utilise la même structure que
précédemment mais en utilisant des Echantillonneurs Bloqueurs (E/B) en amont du multiplexeur.On est dans une situation d’E/B en tête.
Mux
E/B
CAN
Séquenceur
V1
V2
VN
nE/B
E/B
Figure 4: Structure séquentielle simultannée
La prise des échantillons s’effectue au même instant, la conversion est effectuée de manièreprogressive. Cela signifie que les E/B assurent un maintien de l’échantillon durant les Nacquisitions sans introduire de pertes supérieures à la résolution du CAN.
Son coût est moyen.

Structure de la chaîne d’acquisition ESIEE
Acquisition de données I.6
II.3 Acquisition parallèleC’est la structure la plus complète puisqu’elle consiste à disposer N chaînes d’acquisition en
parallèle et de les connecter sur un bus de données commun.
E/B
CAN
V1
V2
VN
n
E/B
E/B
CAN
n
CAN
n
n
Figure 5: Structure parallèle
Avec cette structure, il est possible d’effectuer en même temps l’acquisition d’une donnéependant que l’on en stocke une autre. De même, toutes les conversions peuvent être simultanées, lestockage s’effectuant après. Cela permet un gain de temps sur l’acquisition complète. Mais elle estcoûteuse.
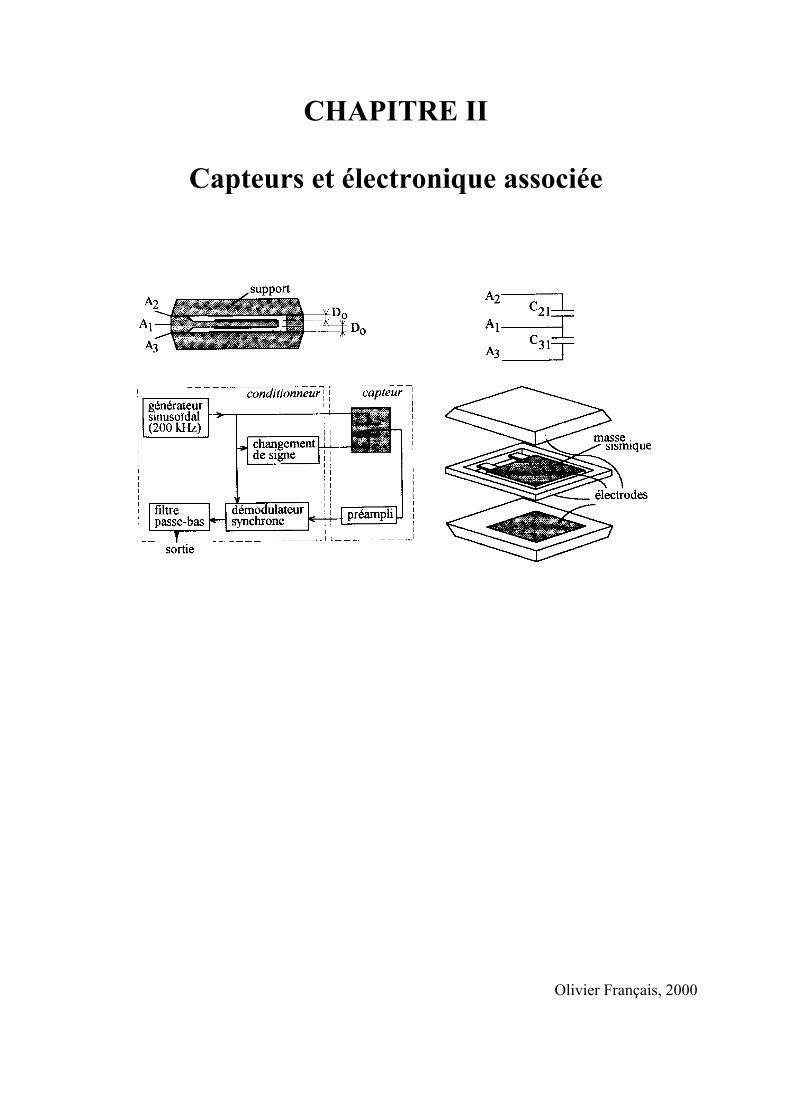
CHAPITRE II
Capteurs et électronique associée
Olivier Français, 2000
Capteurs et électronique associée ESIEE - Olivier Français
Acquisition de données II.2
SOMMAIRE
I DÉFINITIONS .................................................................................................................................................... 3
I.1 MESURANDE ................................................................................................................................................... 3I.2 CAPTEUR......................................................................................................................................................... 3I.3 CHAÎNE DE MESURE ........................................................................................................................................ 4I.4 TYPES DE GRANDEUR PHYSIQUE ..................................................................................................................... 4
II CLASSIFICATION DES CAPTEURS............................................................................................................ 5
II.1 CAPTEURS PASSIFS......................................................................................................................................... 5II.2 CAPTEURS ACTIFS.......................................................................................................................................... 5
III PERFORMANCES D’UN CAPTEUR : DÉFINITION MÉTROLOGIQUE ............................................ 7
III.1 ETENDUE DE LA MESURE .............................................................................................................................. 7III.1.1 Zone nominale d’emploi ....................................................................................................................... 7III.1.2 Zone de non-détérioration .................................................................................................................... 7III.1.3 Zone de non-destruction ....................................................................................................................... 7
III.2 RÉSOLUTION................................................................................................................................................. 7III.3 CARACTÉRISTIQUE D’ENTRÉE-SORTIE D’UN CAPTEUR.................................................................................. 7III.4 SENSIBILITÉ.................................................................................................................................................. 8III.5 FINESSE ........................................................................................................................................................ 8III.6 LINÉARITÉ.................................................................................................................................................... 8III.7 CARACTÉRISTIQUES STATISTIQUES D’UN CAPTEUR ...................................................................................... 9
III.8.1 Fidélité.................................................................................................................................................. 9III.8.2 Justesse ................................................................................................................................................. 9III.8.3 Précision............................................................................................................................................... 9
III.8 RAPIDITÉ ...................................................................................................................................................... 9
IV CONDITIONNEUR ASSOCIÉ .................................................................................................................... 10
IV.1 CAPTEURS ACTIFS ...................................................................................................................................... 10IV.1.1 Capteur source de tension : ................................................................................................................ 10IV.1.2 Capteur source de courant : ............................................................................................................... 10IV.1.3 Capteur source de charge................................................................................................................... 11
IV.2 CAPTEURS PASSIFS ..................................................................................................................................... 11IV.2.1 Montage potentiométrique.................................................................................................................. 11IV.2.2 Montage en pont ................................................................................................................................. 13IV.2.3 Montage oscillant ............................................................................................................................... 14
Capteurs et électronique associée ESIEE - Olivier Français
Acquisition de données II.3
Les capteurs
Lorsque l’on souhaite traduire une grandeur physique en une autre grandeur, on faitappel à ce que l’on nomme classiquement « capteur ». Son rôle est de donner une imageinterprétable d’un phénomène physique de manière à pouvoir l’intégrer dans un processusplus vaste.
Ainsi, un capteur de température au sein d’un micro-processeur s’intègre dans leprocessus de stabilisation en température du composant de manière à assurer son bonfonctionnement. De cette mesure va dépendre la vitesse de rotation du ventilateur ou lacommande en courant d’un module à effet Peltier.
I Définitions
I.1 MesurandeC’est la grandeur physique que l’on souhaite connaître.
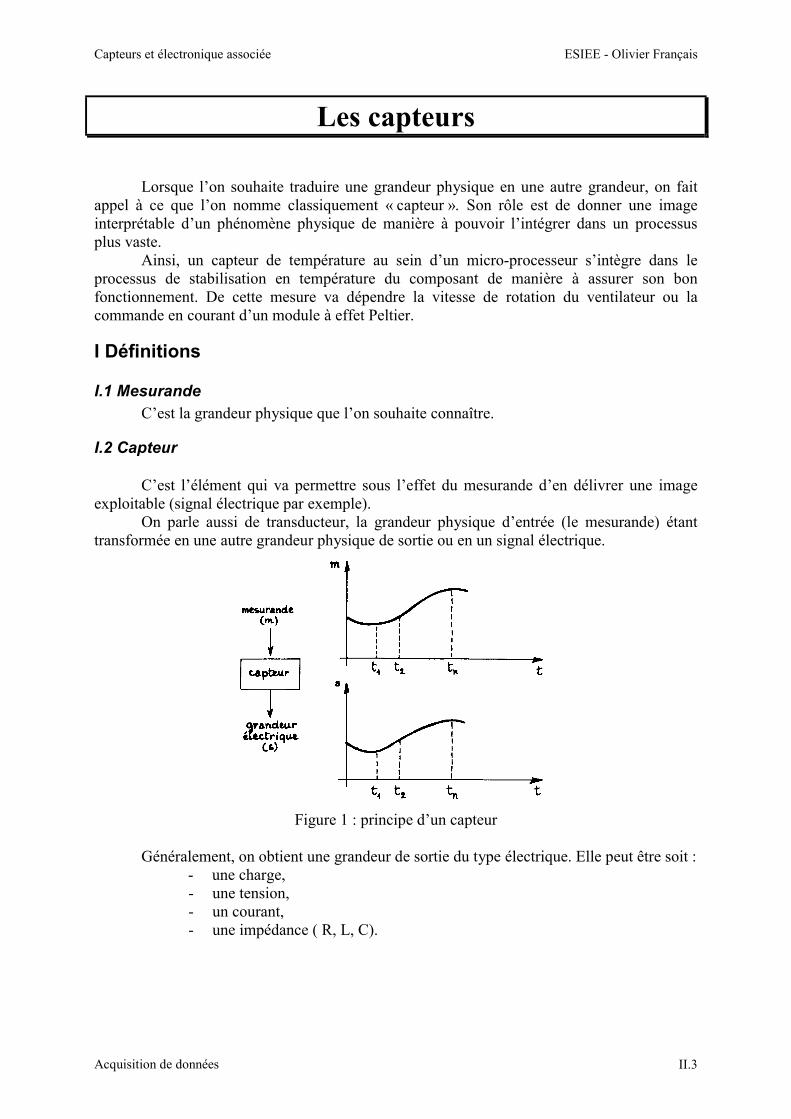
I.2 Capteur
C’est l’élément qui va permettre sous l’effet du mesurande d’en délivrer une imageexploitable (signal électrique par exemple).
On parle aussi de transducteur, la grandeur physique d’entrée (le mesurande) étanttransformée en une autre grandeur physique de sortie ou en un signal électrique.
Figure 1 : principe d’un capteur
Généralement, on obtient une grandeur de sortie du type électrique. Elle peut être soit :- une charge,- une tension,- un courant,- une impédance ( R, L, C).

Capteurs et électronique associée ESIEE - Olivier Français
Acquisition de données II.4
I.3 Chaîne de mesure Pour obtenir une image d’une grandeur physique, on fait appel à une chaîne de mesure
qui peut faire intervenir plusieurs phénomènes différents. Par exemple, la mesure d’un débitpeut se faire en plusieurs étapes :
- transformation du débit en une pression différentielle,- transformation de la pression différentielle en la déformation mécanique d’une
membrane,- transformation de la déformation mécanique en une grandeur électrique (à l’aide
d’un piézo-électrique) via un circuit électronique associé.
L’ensemble de ces étapes constitue la chaîne de mesure.
mesurande primaire
mesurandesecondaire
Corpsd'épreuve
Conditionneur
grandeur électrique
Signal électrique
Capteurintermédaire
CHAINE DE MESURE
Figure 2 : constitution d’une chaîne de mesure classique
De manière classique la sortie d’une chaîne de mesure est du type électrique. Si lachaîne de mesure fait intervenir plusieurs transducteurs, on appelle corps d’épreuve celui encontact direct avec le mesurande. Le dernier transducteur est associé à un conditionneur quifournit la grandeur électrique de sortie de manière exploitable. Le choix de ce conditionneurest une étape importante dans le cadre de la chaîne de mesure car, associé au capteur, ildétermine la nature finale du signal électrique et va influencer les performances de la mesure.
I.4 Types de grandeur physique
On peut classer les grandeurs physiques en 6 familles, chaque capteur s’associant àl’une de ces 6 familles :
- Mécanique : déplacement, force, masse, débit etc…- Thermique : température, capacité thermique, flux thermique etc...- Electrique : courant, tension, charge, impédance, diélectrique etc…- Magnétique : champ magnétique, perméabilité, moment magnétique etc…- Radiatif : lumière visible, rayons X, micro-ondes etc...- (Bio)Chimique : humidité, gaz, sucre, hormone etc…
Capteurs et électronique associée ESIEE - Olivier Français
Acquisition de données II.5
II Classification des capteursOn classifie les capteurs en deux grandes familles en fonction de la caractéristique
électrique de la grandeur de sortie. Cette classification influe sur le conditionneur qui lui estassocié.
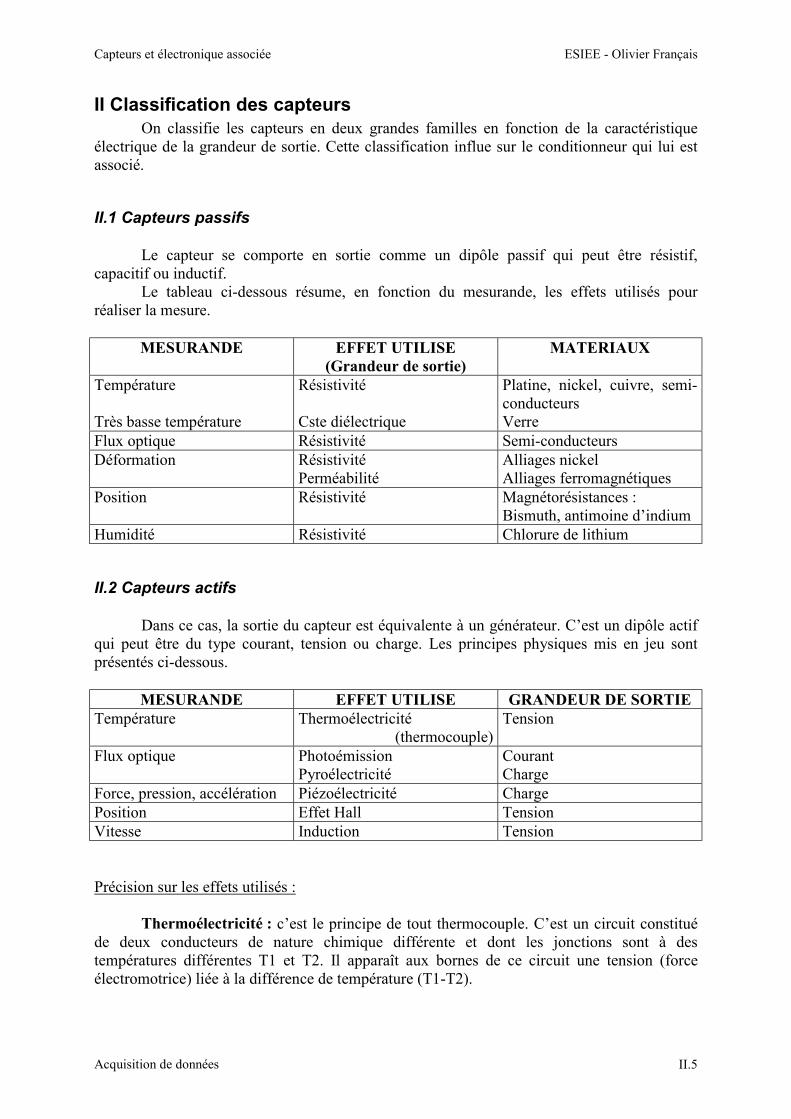
II.1 Capteurs passifs
Le capteur se comporte en sortie comme un dipôle passif qui peut être résistif,capacitif ou inductif.
Le tableau ci-dessous résume, en fonction du mesurande, les effets utilisés pourréaliser la mesure.
MESURANDE EFFET UTILISE(Grandeur de sortie)
MATERIAUX
Température
Très basse température
Résistivité
Cste diélectrique
Platine, nickel, cuivre, semi-conducteursVerre
Flux optique Résistivité Semi-conducteursDéformation Résistivité
PerméabilitéAlliages nickelAlliages ferromagnétiques
Position Résistivité Magnétorésistances :Bismuth, antimoine d’indium
Humidité Résistivité Chlorure de lithium
II.2 Capteurs actifs
Dans ce cas, la sortie du capteur est équivalente à un générateur. C’est un dipôle actifqui peut être du type courant, tension ou charge. Les principes physiques mis en jeu sontprésentés ci-dessous.
MESURANDE EFFET UTILISE GRANDEUR DE SORTIETempérature Thermoélectricité
(thermocouple)Tension
Flux optique PhotoémissionPyroélectricité
CourantCharge
Force, pression, accélération Piézoélectricité ChargePosition Effet Hall TensionVitesse Induction Tension
Précision sur les effets utilisés :
Thermoélectricité : c’est le principe de tout thermocouple. C’est un circuit constituéde deux conducteurs de nature chimique différente et dont les jonctions sont à destempératures différentes T1 et T2. Il apparaît aux bornes de ce circuit une tension (forceélectromotrice) liée à la différence de température (T1-T2).
Capteurs et électronique associée ESIEE - Olivier Français
Acquisition de données II.6
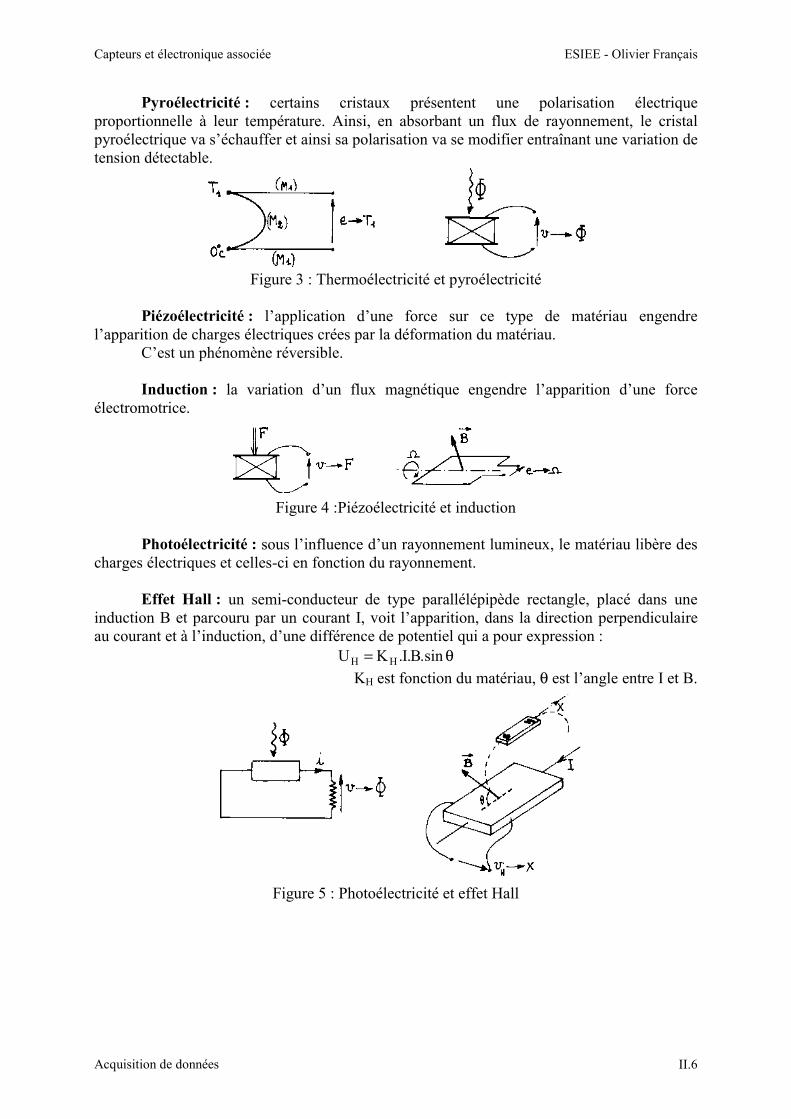
Pyroélectricité : certains cristaux présentent une polarisation électriqueproportionnelle à leur température. Ainsi, en absorbant un flux de rayonnement, le cristalpyroélectrique va s’échauffer et ainsi sa polarisation va se modifier entraînant une variation detension détectable.
Figure 3 : Thermoélectricité et pyroélectricité
Piézoélectricité : l’application d’une force sur ce type de matériau engendrel’apparition de charges électriques crées par la déformation du matériau.
C’est un phénomène réversible.
Induction : la variation d’un flux magnétique engendre l’apparition d’une forceélectromotrice.
Figure 4 :Piézoélectricité et induction
Photoélectricité : sous l’influence d’un rayonnement lumineux, le matériau libère descharges électriques et celles-ci en fonction du rayonnement.
Effet Hall : un semi-conducteur de type parallélépipède rectangle, placé dans uneinduction B et parcouru par un courant I, voit l’apparition, dans la direction perpendiculaireau courant et à l’induction, d’une différence de potentiel qui a pour expression :
θ= sin.B.I.KU HH
KH est fonction du matériau, θ est l’angle entre I et B.
Figure 5 : Photoélectricité et effet Hall
Capteurs et électronique associée ESIEE - Olivier Français
Acquisition de données II.7
III Performances d’un capteur : définition métrologique
De manière à classer les capteurs en fonction de leurs performances, on est amené àdéfinir des paramètres qui permettent de les sélectionner en fonction de l’application.
III.1 Etendue de la mesure
Elle définit la zone dans laquelle les caractéristiques du capteur sont assurées parrapport à des spécifications données. On peut classer cette zone en trois familles :
III.1.1 Zone nominale d’emploi Zone dans laquelle le mesurande peut évoluer sans modification des
caractéristiques du capteur.
III.1.2 Zone de non-détériorationValeurs limites des grandeurs influençant le capteur (mesurande, température
environnante, etc…) sans que les caractéristiques du capteur ne soient modifiées aprèsannulation de surcharges éventuelles.
III.1.3 Zone de non-destruction Elle définit les limites garantissant la non-destruction du capteur mais dans
laquelle il peut y avoir des modifications permanentes des caractéristiques du capteur.
III.2 Résolution
Elle correspond à la plus petite variation du mesurande que le capteur est susceptiblede déceler.
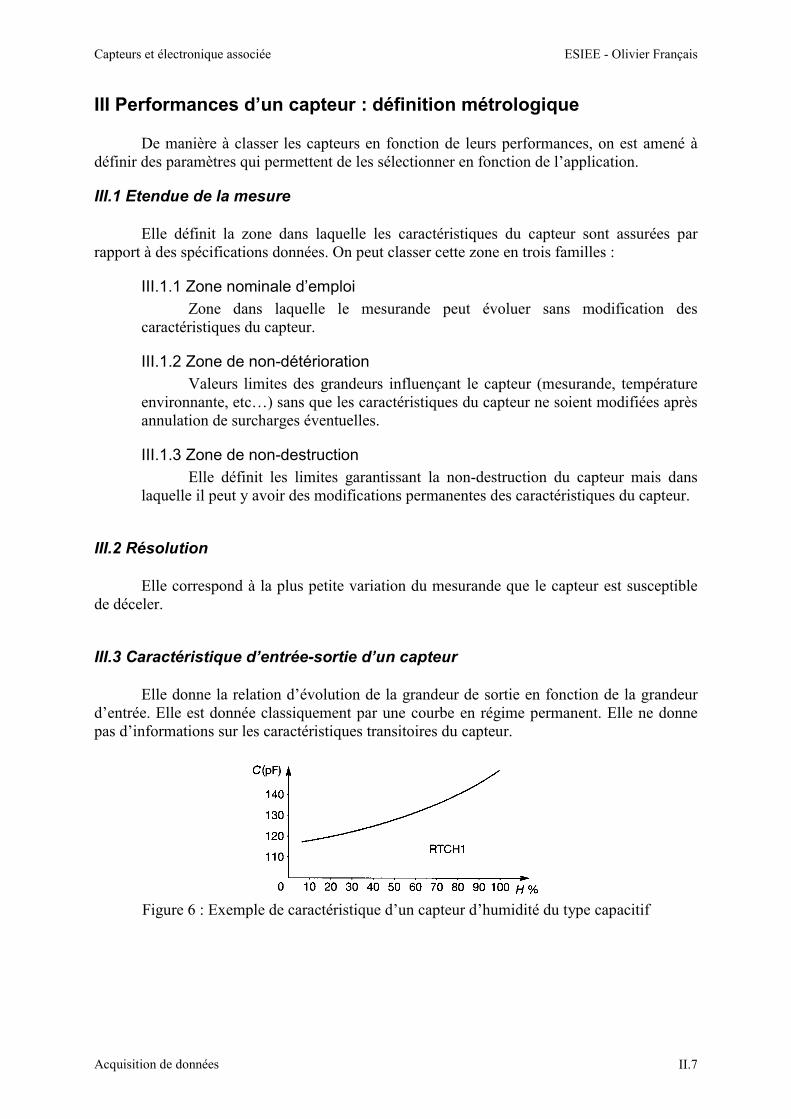
III.3 Caractéristique d’entrée-sortie d’un capteur
Elle donne la relation d’évolution de la grandeur de sortie en fonction de la grandeurd’entrée. Elle est donnée classiquement par une courbe en régime permanent. Elle ne donnepas d’informations sur les caractéristiques transitoires du capteur.
Figure 6 : Exemple de caractéristique d’un capteur d’humidité du type capacitif
Capteurs et électronique associée ESIEE - Olivier Français
Acquisition de données II.8
III.4 Sensibilité
Elle détermine l’évolution de la grandeur de sortie en fonction de la grandeur d’entréeen un point donné. C’est la pente de la tangente à la courbe issue de la caractéristique ducapteur.
Dans le cas d’un capteur linéaire, la sensibilité du capteur est constante.
étude'Ptd)mesurande(d
)sortie de Grandeur(déSensibilit =
Il faut noter que la sensibilité d’un capteur peut être fonction du conditionneur auquelil est associé.
Dans l’exemple de la figure 6, la sensibilité moyenne du capteur est de 0.4pF/%H.
III.5 Finesse
C’est la qualité d’un capteur à ne pas venir modifier par sa présence la grandeur àmesurer. Cela permet d’évaluer l’influence du capteur sur la mesure. On la définit nonseulement vis à vis du capteur mais aussi vis à vis de l’environnement d’utilisation du capteur.Par exemple, dans le cas d’une mesure thermique, on cherchera un capteur à faible capacitécalorifique vis à vis des grandeurs l’environnant.
Finesse et sensibilité sont en général antagonistes. Il peut y avoir un compromis àfaire.
Pour un capteur d’induction B, un capteur à forte perméabilité sera très sensible, parcontre sa présence aura tendance à perturber les lignes de champ et la mesure de l’inductionne sera pas celle sans capteur, d’où une mauvaise finesse. Mais cette erreur peut être évaluéeen vue d’une correction post-mesure et ainsi faire abstraction de la présence du capteur.
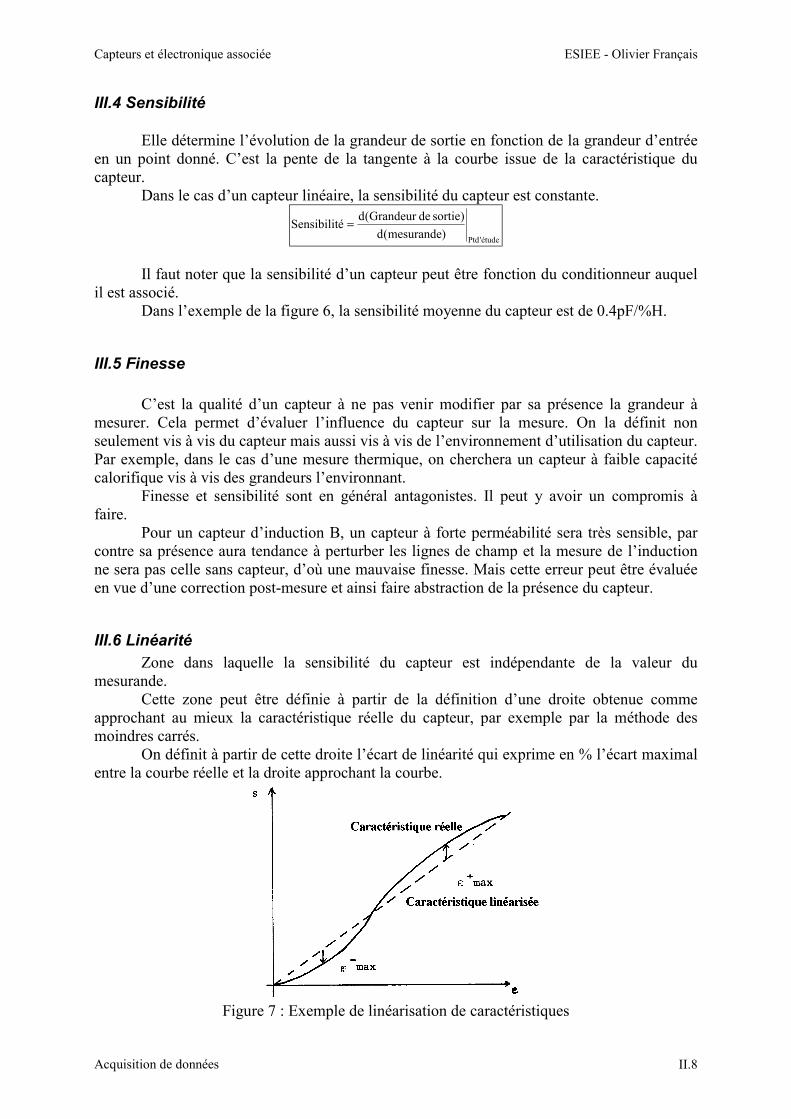
III.6 LinéaritéZone dans laquelle la sensibilité du capteur est indépendante de la valeur du
mesurande.Cette zone peut être définie à partir de la définition d’une droite obtenue comme
approchant au mieux la caractéristique réelle du capteur, par exemple par la méthode desmoindres carrés.
On définit à partir de cette droite l’écart de linéarité qui exprime en % l’écart maximalentre la courbe réelle et la droite approchant la courbe.
Figure 7 : Exemple de linéarisation de caractéristiques

Capteurs et électronique associée ESIEE - Olivier Français
Acquisition de données II.9
III.7 Caractéristiques statistiques d’un capteur
Ces paramètres permettent de prendre en compte la notion d’erreurs accidentelles quipeuvent survenir sur un capteur.
Rappel : soit n mesures effectuées sur un mesurande, on définit à partir de ces n mesures :
- la valeur moyenne : n
mm i
i∑=
- l’écart type (dispersion des résultats autour de la valeur moyenne) :
1n
)mm( 2i
−−
=σ ∑
III.8.1 FidélitéElle définie la qualité d’un capteur à délivrer une mesure répétitive sans
erreurs. L’erreur de fidélité correspond à l’écart type obtenu sur une série de mesurescorrespondant à un mesurande constant.
III.8.2 JustesseC’est l’aptitude d’un capteur à délivrer une réponse proche de la valeur vraie et
ceci indépendamment de la notion de fidélité. Elle est liée à la valeur moyenneobtenue sur un grand nombre de mesures par rapport à la valeur réelle.
III.8.3 PrécisionElle définie l’écart en % que l’on peut obtenir entre la valeur réelle et la valeur
obtenue en sortie du capteur. Ainsi un capteur précis aura à la fois une bonne fidélité etune bonne justesse.
Fidélité Justesse Précision
Figure 8 : Caractéristiques statistiques d’un capteur
III.8 Rapidité
C’est la qualité d’un capteur à suivre les variations du mesurande. On peut la chiffrerde plusieurs manières :
- bande passante du capteur. (à –3 dB par exemple).- Fréquence de résonance du capteur.- Temps de réponse (à x%) à un échelon du mesurande.
Capteurs et électronique associée ESIEE - Olivier Français
Acquisition de données II.10
IV Conditionneur associé
Le conditionnement de la mesure consiste à rendre exploitable la mesure issue ducapteur. L’association capteur-conditionneur détermine le signal électrique et sescaractéristiques.
On effectue une adaptation de la source du signal à la chaîne de mesure complète.
IV.1 Capteurs actifsLe capteur se comporte comme une source.
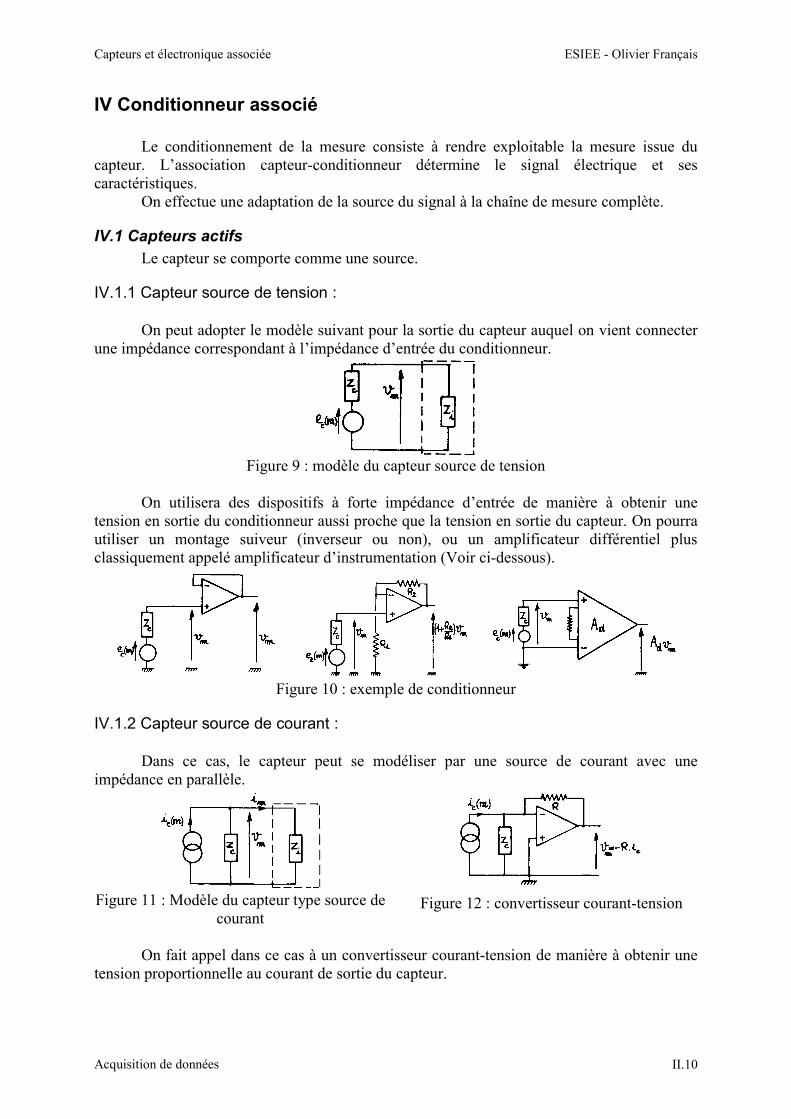
IV.1.1 Capteur source de tension :
On peut adopter le modèle suivant pour la sortie du capteur auquel on vient connecterune impédance correspondant à l’impédance d’entrée du conditionneur.
Figure 9 : modèle du capteur source de tension
On utilisera des dispositifs à forte impédance d’entrée de manière à obtenir unetension en sortie du conditionneur aussi proche que la tension en sortie du capteur. On pourrautiliser un montage suiveur (inverseur ou non), ou un amplificateur différentiel plusclassiquement appelé amplificateur d’instrumentation (Voir ci-dessous).
Figure 10 : exemple de conditionneur
IV.1.2 Capteur source de courant :
Dans ce cas, le capteur peut se modéliser par une source de courant avec uneimpédance en parallèle.
Figure 11 : Modèle du capteur type source decourant
Figure 12 : convertisseur courant-tension
On fait appel dans ce cas à un convertisseur courant-tension de manière à obtenir unetension proportionnelle au courant de sortie du capteur.
Capteurs et électronique associée ESIEE - Olivier Français
Acquisition de données II.11
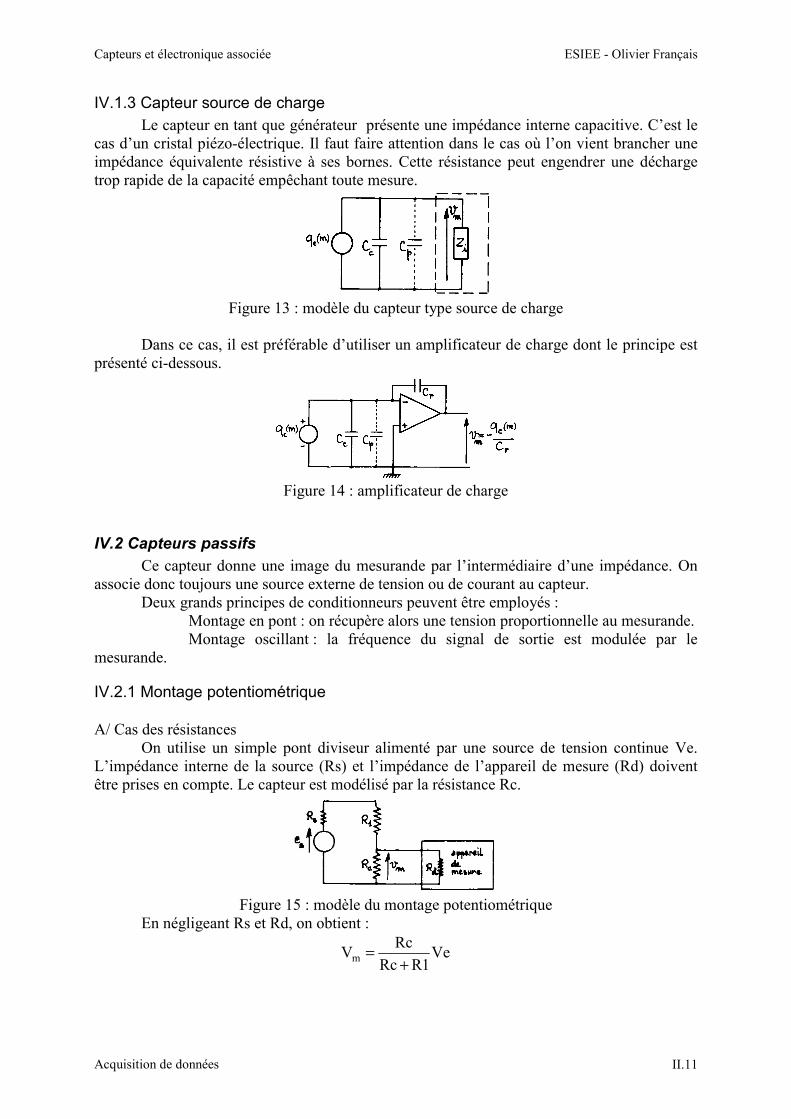
IV.1.3 Capteur source de chargeLe capteur en tant que générateur présente une impédance interne capacitive. C’est le
cas d’un cristal piézo-électrique. Il faut faire attention dans le cas où l’on vient brancher uneimpédance équivalente résistive à ses bornes. Cette résistance peut engendrer une déchargetrop rapide de la capacité empêchant toute mesure.
Figure 13 : modèle du capteur type source de charge
Dans ce cas, il est préférable d’utiliser un amplificateur de charge dont le principe estprésenté ci-dessous.
Figure 14 : amplificateur de charge
IV.2 Capteurs passifsCe capteur donne une image du mesurande par l’intermédiaire d’une impédance. On
associe donc toujours une source externe de tension ou de courant au capteur.Deux grands principes de conditionneurs peuvent être employés :
Montage en pont : on récupère alors une tension proportionnelle au mesurande.Montage oscillant : la fréquence du signal de sortie est modulée par le
mesurande.
IV.2.1 Montage potentiométrique
A/ Cas des résistancesOn utilise un simple pont diviseur alimenté par une source de tension continue Ve.
L’impédance interne de la source (Rs) et l’impédance de l’appareil de mesure (Rd) doiventêtre prises en compte. Le capteur est modélisé par la résistance Rc.
Figure 15 : modèle du montage potentiométriqueEn négligeant Rs et Rd, on obtient :
Ve1RRc
RcVm +
=
Capteurs et électronique associée ESIEE - Olivier Français
Acquisition de données II.12
La relation qui lie la tension de sortie (Vm) au paramètre image du mesurande (Rc)n’est pas linéaire. La sensibilité du montage n’est donc pas constante. On peut néanmoinsfaire une étude en petites variations du mesurande (étude petit signaux). Ainsi si l’on se placeaux petites variations 1RRcR +<∆ :
VmVmoVm
RRcoRc
∆+→∆+→
Alors on obtient :
2)Rco1R(
R)1R(VeVm
+∆=∆
C’est une relation linéaire d’où on peut directement extraire la sensibilité du capteurRc/Vm ∆∆ . Cette sensibilité est maximum pour R1=Rco soit :
R1R4
VeVm ∆=∆
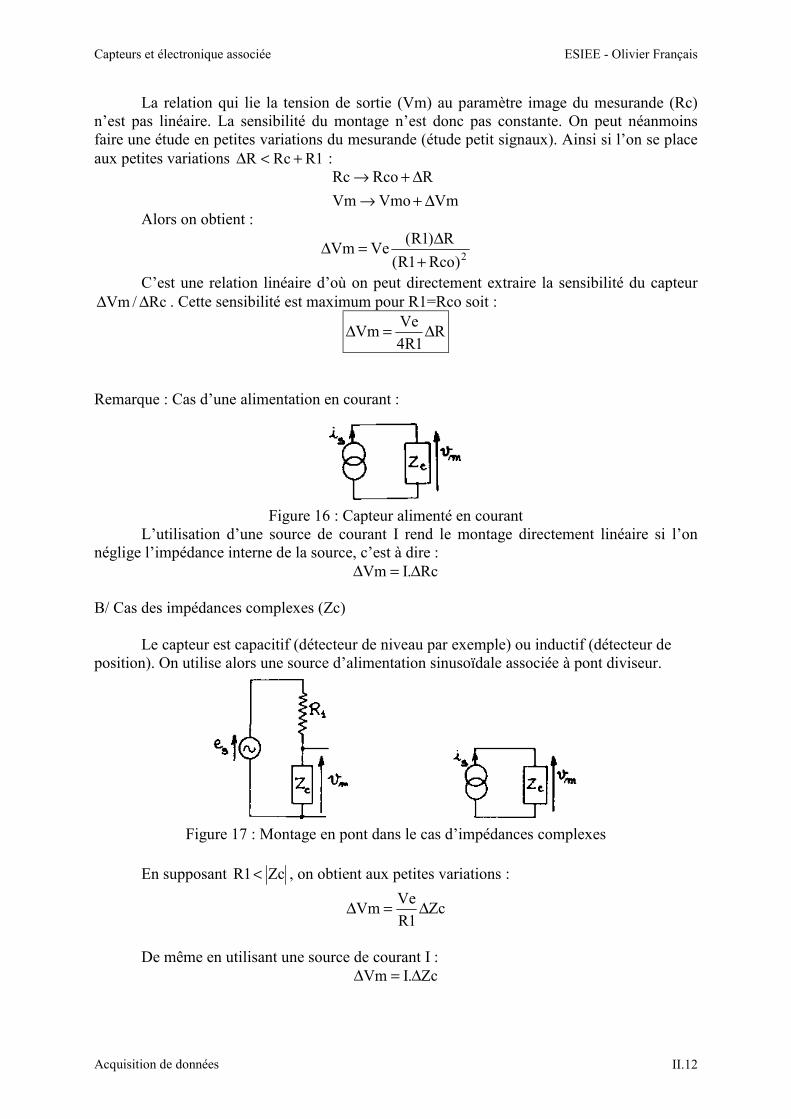
Remarque : Cas d’une alimentation en courant :
Figure 16 : Capteur alimenté en courantL’utilisation d’une source de courant I rend le montage directement linéaire si l’on
néglige l’impédance interne de la source, c’est à dire :Rc.IVm ∆=∆
B/ Cas des impédances complexes (Zc)
Le capteur est capacitif (détecteur de niveau par exemple) ou inductif (détecteur deposition). On utilise alors une source d’alimentation sinusoïdale associée à pont diviseur.
Figure 17 : Montage en pont dans le cas d’impédances complexes
En supposant Zc1R < , on obtient aux petites variations :
Zc1R
VeVm ∆=∆
De même en utilisant une source de courant I :Zc.IVm ∆=∆
Capteurs et électronique associée ESIEE - Olivier Français
Acquisition de données II.13
IV.2.2 Montage en pont
L’utilisation d’un montage potentiométrique présente le défaut d’avoir en sortie laprésence d’une tension continu, et ceci en l’absence de variations du mesurande. L’emploid’un montage en pont présente l’avantage de s’affranchir de cette tension continue.
Figure 18 : montage en pont
Calcul des potentiels :
En A : ERR
RV
1C
CA +
= En B : ERR
RV
34
4B +
=
On obtient une tension de mesure encore appelée tension déséquilibre du pont :
E)RR)(RR(
RRRRVVV
34C1
413cBAm ++
−=−=
Si on veut une tension nulle en l’absence d’évolution du mesurande (cas stableRc=Rco), on trouve la condition d’équilibre d’un pont de Wheastone :
413C RRRR =
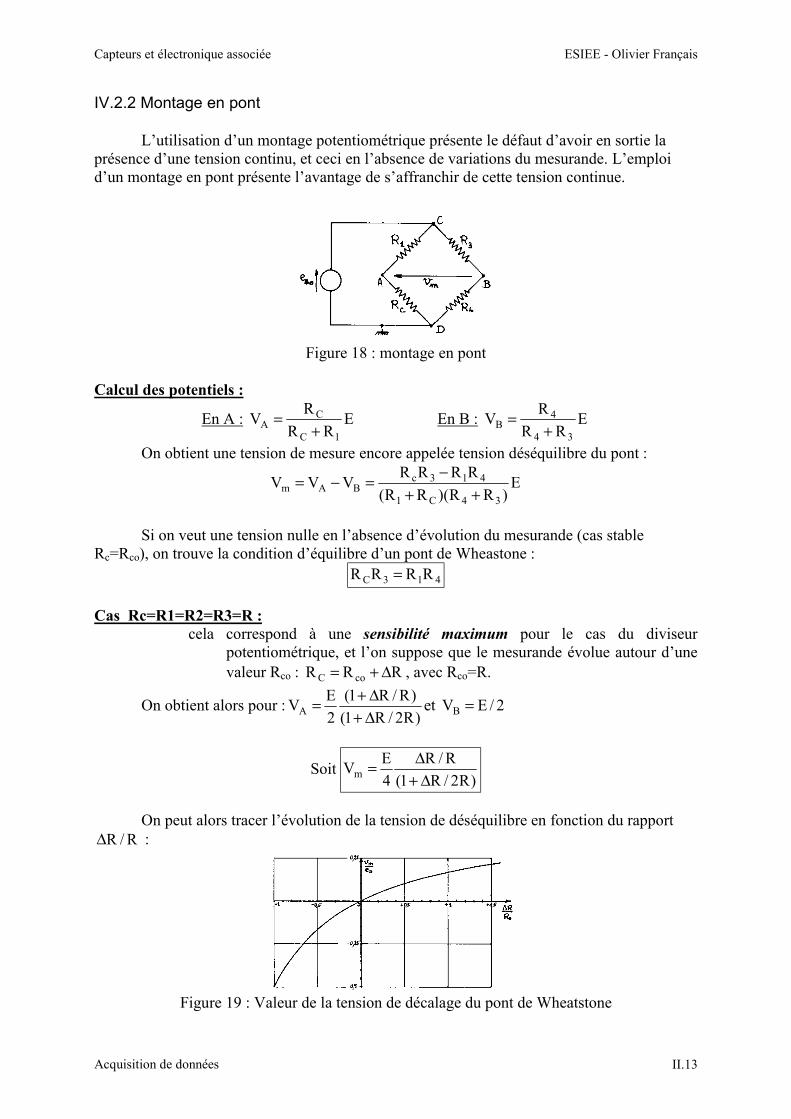
Cas Rc=R1=R2=R3=R :cela correspond à une sensibilité maximum pour le cas du diviseur
potentiométrique, et l’on suppose que le mesurande évolue autour d’unevaleur Rco : RRR coC ∆+= , avec Rco=R.
On obtient alors pour :)R2/R1(
)R/R1(
2
EVA ∆+
∆+= et 2/EVB =
Soit )R2/R1(
R/R
4
EVm ∆+
∆=
On peut alors tracer l’évolution de la tension de déséquilibre en fonction du rapportR/R∆ :
Figure 19 : Valeur de la tension de décalage du pont de Wheatstone
Capteurs et électronique associée ESIEE - Olivier Français
Acquisition de données II.14
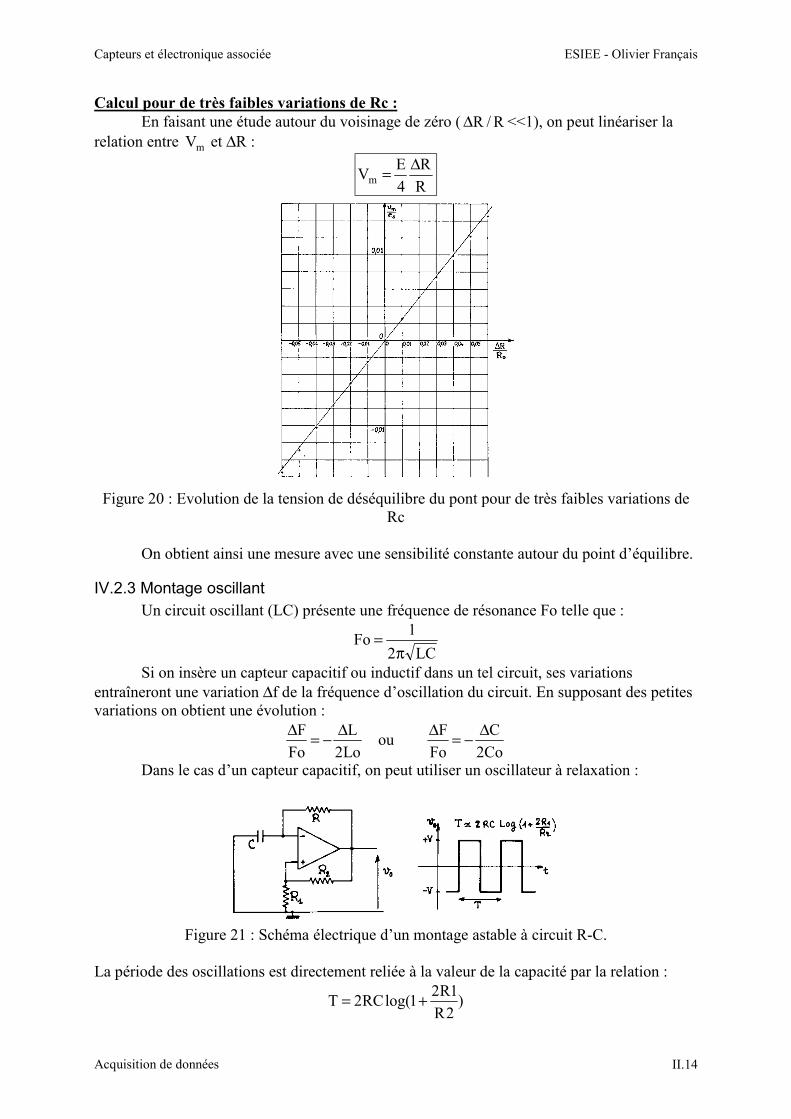
Calcul pour de très faibles variations de Rc :En faisant une étude autour du voisinage de zéro ( R/R∆ <<1), on peut linéariser la
relation entre mV et ∆R :
R
R
4
EVm
∆=
Figure 20 : Evolution de la tension de déséquilibre du pont pour de très faibles variations deRc
On obtient ainsi une mesure avec une sensibilité constante autour du point d’équilibre.
IV.2.3 Montage oscillantUn circuit oscillant (LC) présente une fréquence de résonance Fo telle que :
LC2
1Fo
π=
Si on insère un capteur capacitif ou inductif dans un tel circuit, ses variationsentraîneront une variation ∆f de la fréquence d’oscillation du circuit. En supposant des petitesvariations on obtient une évolution :
Lo2
L
Fo
F ∆−=∆ou
Co2
C
Fo
F ∆−=∆
Dans le cas d’un capteur capacitif, on peut utiliser un oscillateur à relaxation :
Figure 21 : Schéma électrique d’un montage astable à circuit R-C.
La période des oscillations est directement reliée à la valeur de la capacité par la relation :
)2R
1R21log(RC2T +=
CHAPITRE III
Amplificateur d’instrumentation
Olivier FRANÇAIS, 2000
Amplificateur d’instrumentation ESIEE - Olivier Français
Acquisition de données III.2
SOMMAIRE
I NOTION DE TENSION DE MODE COMMUN ET D’AMPLIFICATEUR DIFFÉRENTIEL................. 3
I.1 DÉFINITION DE LA TENSION DE MODE COMMUN.............................................................................................. 3I.1.1 Tension de mode commun due à l’alimentation : cas du montage en pont ............................................. 4
I.2 AMPLIFICATEUR DIFFÉRENTIEL ET TAUX DE RÉJECTION DE MODE COMMUN................................................. 5
II RAPPEL SUR L’AMPLIFICATEUR OPÉRATIONNEL............................................................................ 6
II.1 CARACTÉRISTIQUES PRINCIPALES.................................................................................................................. 6II.2 MODÉLISATION CLASSIQUE DES DÉFAUTS ..................................................................................................... 7
II.2.1 Défauts statiques.................................................................................................................................... 7II.2.2 Défauts Dynamiques .............................................................................................................................. 7
I.3 SPÉCIFICATIONS DES DIFFÉRENTES TECHNOLOGIES......................................................................................... 8
III L’AMPLIFICATEUR D’INSTRUMENTATION ........................................................................................ 8
III.1 CARACTÉRISTIQUES IDÉALES D’UN AMPLIFICATEUR D’INSTRUMENTATION ................................................. 8III.2 MONTAGE 1 : L’AMPLIFICATEUR DE DIFFÉRENCE......................................................................................... 9
III.2.1 Calcul des performances dans le cas parfait........................................................................................ 9III.2.2 Influence des résistances sur les performances .................................................................................... 9II.2.3 Influence de l’A.OP.............................................................................................................................. 10II.2.4 Impédance d’entrée.............................................................................................................................. 11
II.3 MONTAGE 2 : AMPLIFICATEUR D‘INSTRUMENTATION À DEUX ÉTAGES ........................................................ 11II.3.1 Cas parfait ........................................................................................................................................... 11II.3.2 Influence des résistances...................................................................................................................... 12II.3.3 Impédance d’entrée.............................................................................................................................. 12II.3.4 Astuce de contrôle de gain................................................................................................................... 13
II.4 MONTAGE 3 : L’AMPLIFICATEUR D’INSTRUMENTATION À TROIS ÉTAGES ................................................... 13II.4.1 Cas parfait ........................................................................................................................................... 13II.4.2 Défaut du à l’A.Op de sortie ................................................................................................................ 14
IV AMPLIFICATEUR D’ISOLEMENTS ........................................................................................................ 14
Amplificateur d’instrumentation ESIEE - Olivier Français
Acquisition de données III.3
Amplificateur d’instrumentationAmplification de la mesure – Tension de mode commun
Les signaux électriques issus de capteurs (thermocouple, ponts de mesure) sontgénéralement de faible niveau. Si l’on souhaite travailler avec une bonne précision, il estnécessaire de les amplifier. Mais cette amplification ne doit concerner que le signal utile. Orce dernier côtoie bien souvent une tension parasite (souvent du même ordre de grandeur quele signal utile) ainsi qu’une tension de mode commun due au conditionneur associé au capteur(cas d’un pont de Wheatstone). Il faut donc faire une amplification « sélective » qui élimineou atténue fortement tout signal ne contenant pas d’information pour ne garder que le signalcapteur.
On fait appel pour cela à l’amplificateur d’instrumentation qui adapte le signal utile àla chaîne d’acquisition de manière la plus précise. C’est un amplificateur différentiel à forttaux de réjection de mode commun.
I Notion de tension de mode commun et d’amplificateur différentiel
I.1 Définition de la tension de mode commun
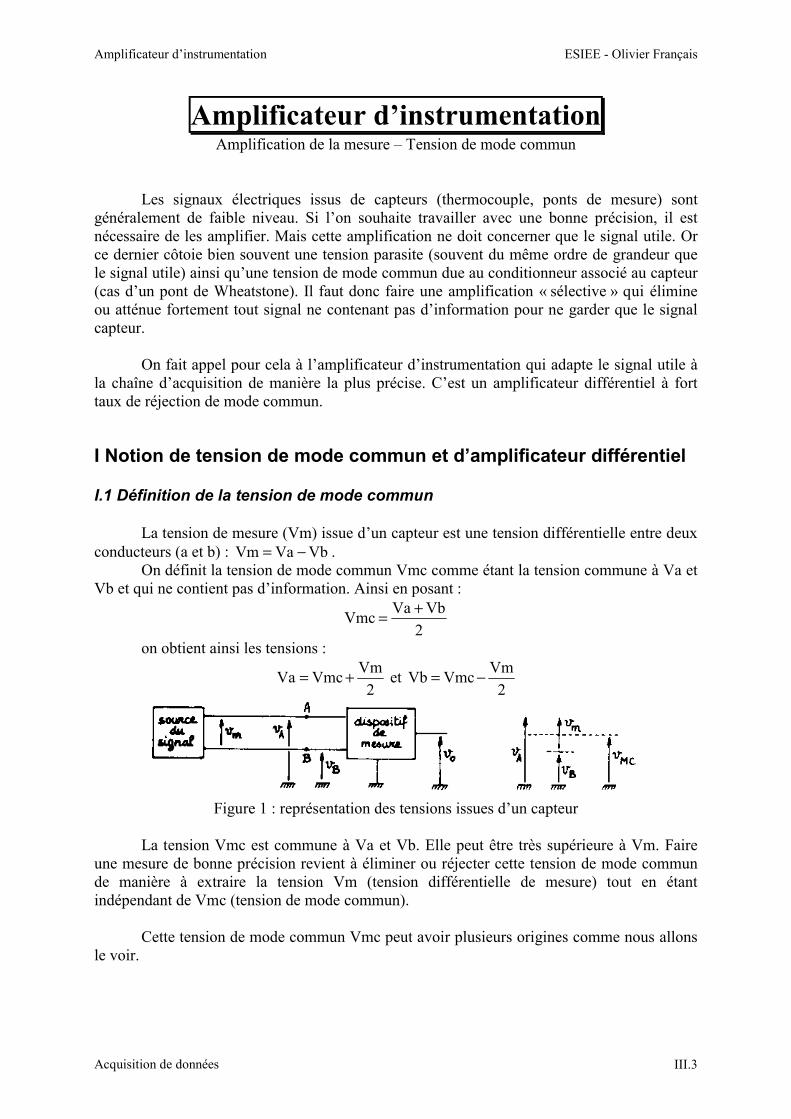
La tension de mesure (Vm) issue d’un capteur est une tension différentielle entre deuxconducteurs (a et b) : VbVaVm −= .
On définit la tension de mode commun Vmc comme étant la tension commune à Va etVb et qui ne contient pas d’information. Ainsi en posant :
2
VbVaVmc
+=
on obtient ainsi les tensions :
2
VmVmcVa += et
2
VmVmcVb −=
Figure 1 : représentation des tensions issues d’un capteur
La tension Vmc est commune à Va et Vb. Elle peut être très supérieure à Vm. Faireune mesure de bonne précision revient à éliminer ou réjecter cette tension de mode communde manière à extraire la tension Vm (tension différentielle de mesure) tout en étantindépendant de Vmc (tension de mode commun).
Cette tension de mode commun Vmc peut avoir plusieurs origines comme nous allonsle voir.
Amplificateur d’instrumentation ESIEE - Olivier Français
Acquisition de données III.4
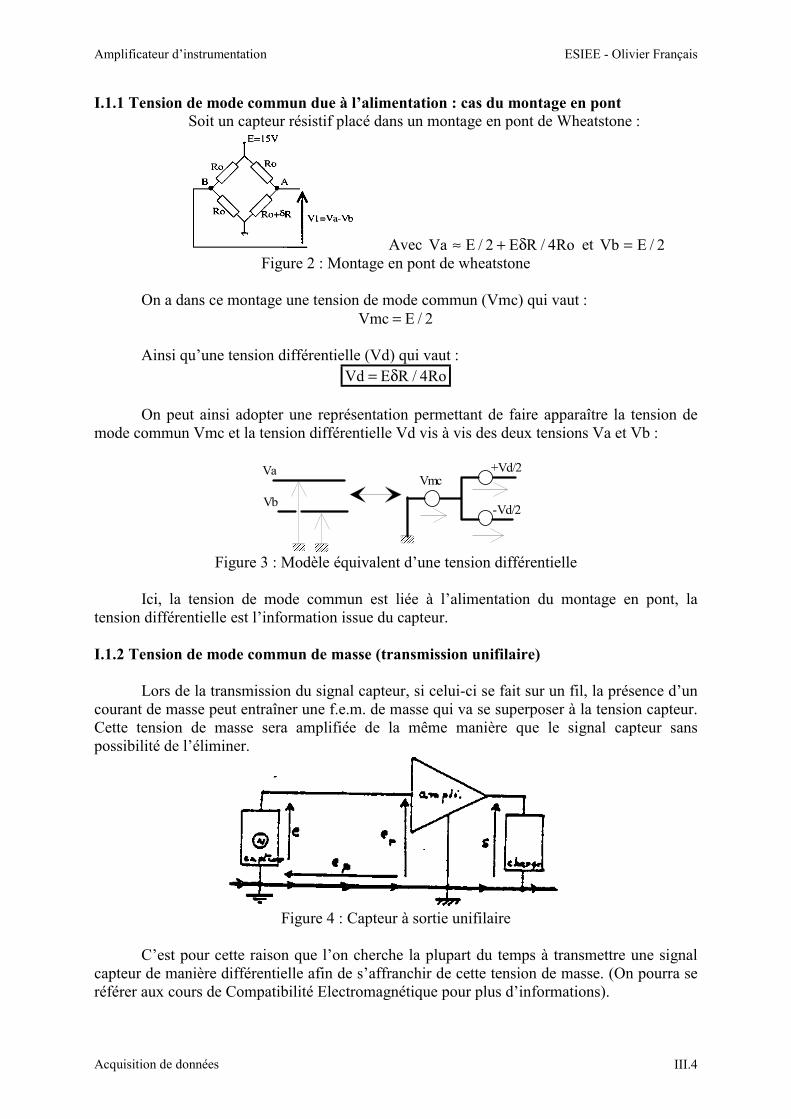
I.1.1 Tension de mode commun due à l’alimentation : cas du montage en pontSoit un capteur résistif placé dans un montage en pont de Wheatstone :
Avec Ro4/RE2/EVa δ+≈ et 2/EVb =Figure 2 : Montage en pont de wheatstone
On a dans ce montage une tension de mode commun (Vmc) qui vaut :2/EVmc =
Ainsi qu’une tension différentielle (Vd) qui vaut :Ro4/REVd δ=
On peut ainsi adopter une représentation permettant de faire apparaître la tension demode commun Vmc et la tension différentielle Vd vis à vis des deux tensions Va et Vb :
Va
Vb
Vmc+Vd/2
-Vd/2
Figure 3 : Modèle équivalent d’une tension différentielle
Ici, la tension de mode commun est liée à l’alimentation du montage en pont, latension différentielle est l’information issue du capteur.
I.1.2 Tension de mode commun de masse (transmission unifilaire)
Lors de la transmission du signal capteur, si celui-ci se fait sur un fil, la présence d’uncourant de masse peut entraîner une f.e.m. de masse qui va se superposer à la tension capteur.Cette tension de masse sera amplifiée de la même manière que le signal capteur sanspossibilité de l’éliminer.
Figure 4 : Capteur à sortie unifilaire
C’est pour cette raison que l’on cherche la plupart du temps à transmettre une signalcapteur de manière différentielle afin de s’affranchir de cette tension de masse. (On pourra seréférer aux cours de Compatibilité Electromagnétique pour plus d’informations).
Amplificateur d’instrumentation ESIEE - Olivier Français
Acquisition de données III.5
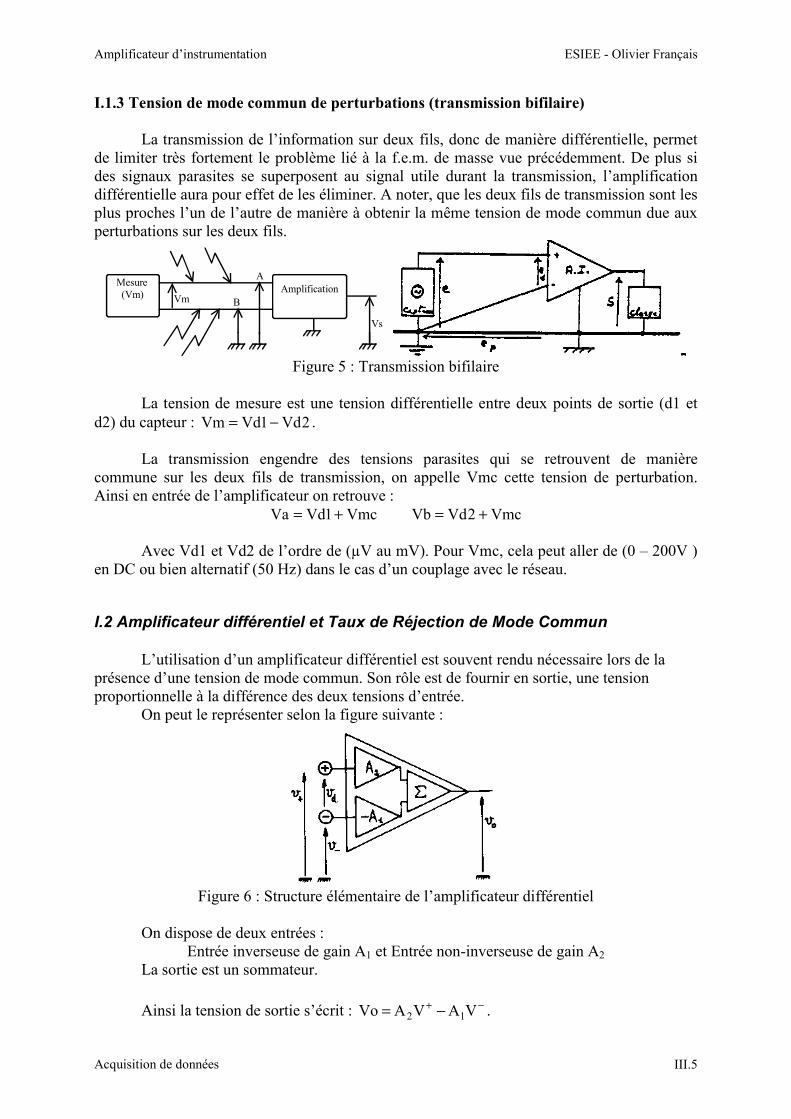
I.1.3 Tension de mode commun de perturbations (transmission bifilaire)
La transmission de l’information sur deux fils, donc de manière différentielle, permetde limiter très fortement le problème lié à la f.e.m. de masse vue précédemment. De plus sides signaux parasites se superposent au signal utile durant la transmission, l’amplificationdifférentielle aura pour effet de les éliminer. A noter, que les deux fils de transmission sont lesplus proches l’un de l’autre de manière à obtenir la même tension de mode commun due auxperturbations sur les deux fils.
Mesure (Vm) Amplification
Vm
A
B
Vs
Figure 5 : Transmission bifilaire
La tension de mesure est une tension différentielle entre deux points de sortie (d1 etd2) du capteur : 2Vd1VdVm −= .
La transmission engendre des tensions parasites qui se retrouvent de manièrecommune sur les deux fils de transmission, on appelle Vmc cette tension de perturbation.Ainsi en entrée de l’amplificateur on retrouve :
Vmc1VdVa += Vmc2VdVb +=
Avec Vd1 et Vd2 de l’ordre de (µV au mV). Pour Vmc, cela peut aller de (0 – 200V )en DC ou bien alternatif (50 Hz) dans le cas d’un couplage avec le réseau.
I.2 Amplificateur différentiel et Taux de Réjection de Mode Commun
L’utilisation d’un amplificateur différentiel est souvent rendu nécessaire lors de laprésence d’une tension de mode commun. Son rôle est de fournir en sortie, une tensionproportionnelle à la différence des deux tensions d’entrée.
On peut le représenter selon la figure suivante :
Figure 6 : Structure élémentaire de l’amplificateur différentiel
On dispose de deux entrées :Entrée inverseuse de gain A1 et Entrée non-inverseuse de gain A2
La sortie est un sommateur.
Ainsi la tension de sortie s’écrit : −+ −= VAVAVo 12 .
Amplificateur d’instrumentation ESIEE - Olivier Français
Acquisition de données III.6
En posant : 2
VVVmc
−+ += et −+ −= VVVd . On peut réécrire Vo sous la forme :
Vmc.AmcVd.AdVo +=
Où Ad est le gain différentiel et Amc le gain de mode commun avec
2
2A1AAd
+= et 1A2AAmc −=
On caractérise un amplificateur différentiel par son taux de réjection de mode
commun τ avec : Amc
Ad=τ .
Ainsi l’expression de la tension de sortie d’un amplificateur différentiel s’écrit :
)Vmc1
Vd(AdVoτ
+=
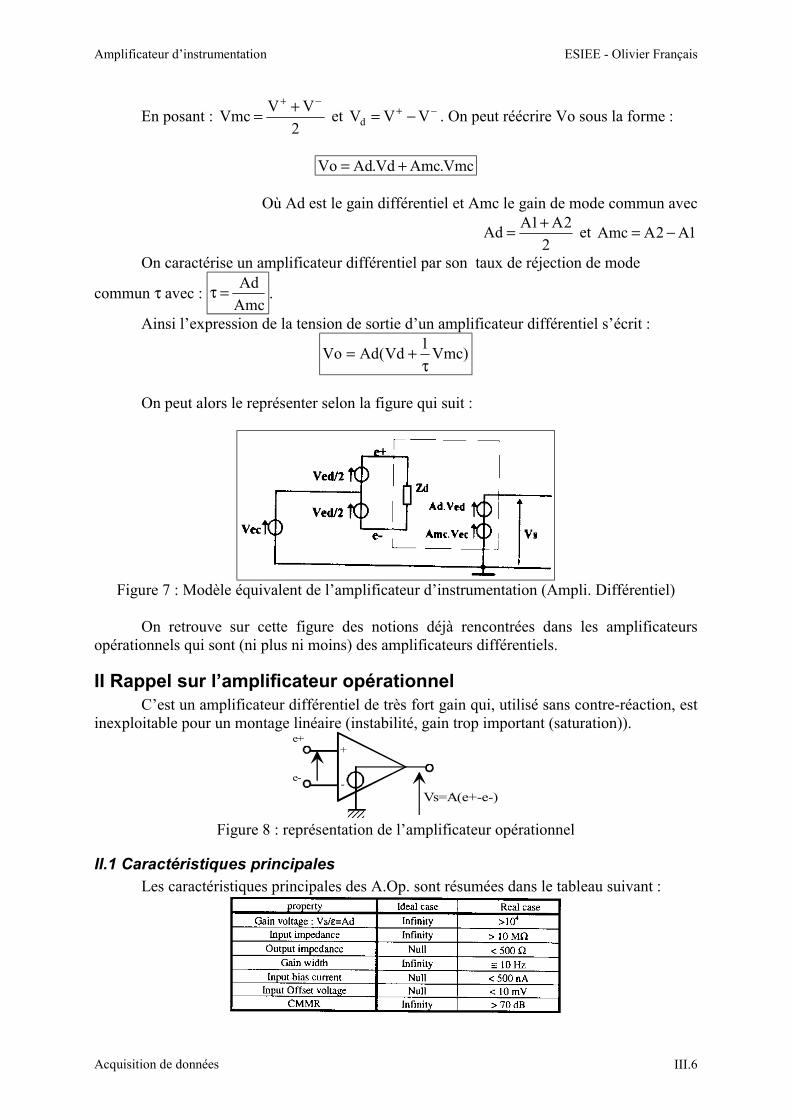
On peut alors le représenter selon la figure qui suit :
Figure 7 : Modèle équivalent de l’amplificateur d’instrumentation (Ampli. Différentiel)
On retrouve sur cette figure des notions déjà rencontrées dans les amplificateursopérationnels qui sont (ni plus ni moins) des amplificateurs différentiels.
II Rappel sur l’amplificateur opérationnelC’est un amplificateur différentiel de très fort gain qui, utilisé sans contre-réaction, est
inexploitable pour un montage linéaire (instabilité, gain trop important (saturation)).
+
-
e+
e-
.
Vs=A(e+-e-)
Figure 8 : représentation de l’amplificateur opérationnel
II.1 Caractéristiques principalesLes caractéristiques principales des A.Op. sont résumées dans le tableau suivant :
Amplificateur d’instrumentation ESIEE - Olivier Français
Acquisition de données III.7
II.2 Modélisation classique des défauts De manière à prendre en compte les défauts des A.Op., on fait appel à des
représentations équivalentes.
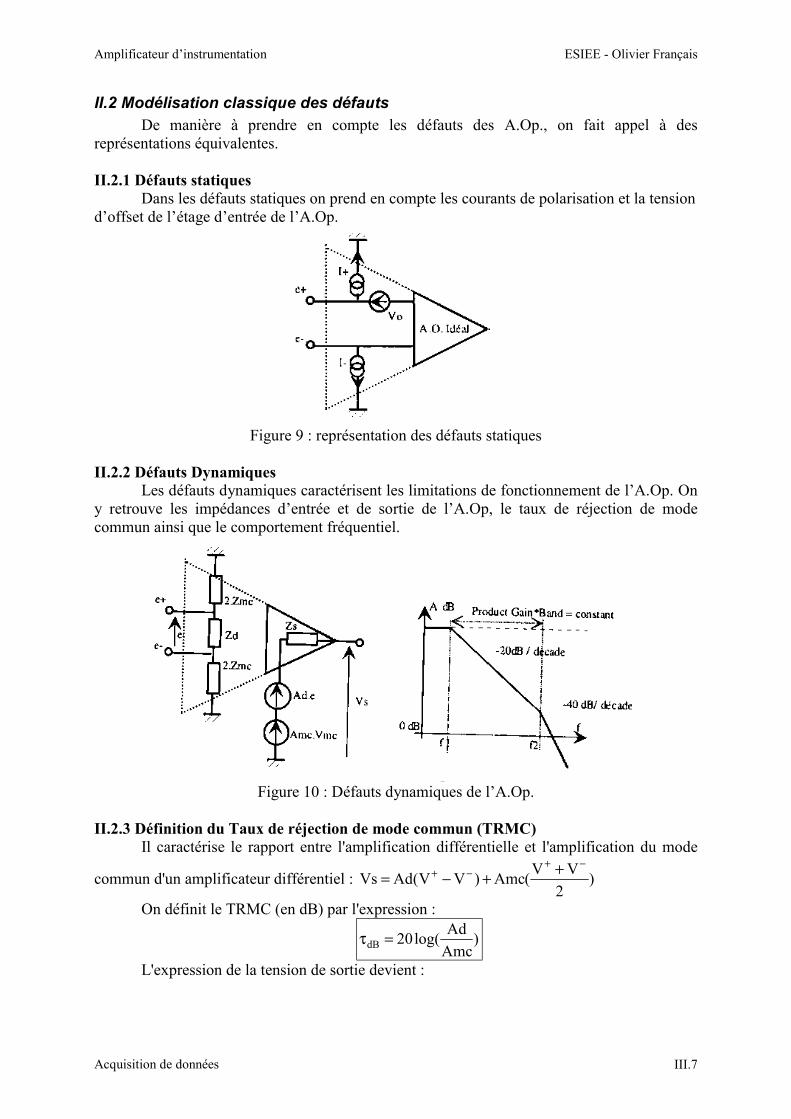
II.2.1 Défauts statiquesDans les défauts statiques on prend en compte les courants de polarisation et la tension
d’offset de l’étage d’entrée de l’A.Op.
Figure 9 : représentation des défauts statiques
II.2.2 Défauts DynamiquesLes défauts dynamiques caractérisent les limitations de fonctionnement de l’A.Op. On
y retrouve les impédances d’entrée et de sortie de l’A.Op, le taux de réjection de modecommun ainsi que le comportement fréquentiel.
Figure 10 : Défauts dynamiques de l’A.Op.
II.2.3 Définition du Taux de réjection de mode commun (TRMC)Il caractérise le rapport entre l'amplification différentielle et l'amplification du mode
commun d'un amplificateur différentiel : )2
VV(Amc)VV(AdVs
−+−+ ++−=
On définit le TRMC (en dB) par l'expression :
)Amc
Adlog(20dB =τ
L'expression de la tension de sortie devient :
Amplificateur d’instrumentation ESIEE - Olivier Français
Acquisition de données III.8
+τ
+−=−+
−+ )2
VV(
1)VV(AdVs
La quantité )2
VV(
1 −+ +τ
est aussi appelée tension de Mode Commun ramenée en
entrée différentielle. Cette tension introduit une erreur sur l'amplification différentielle.
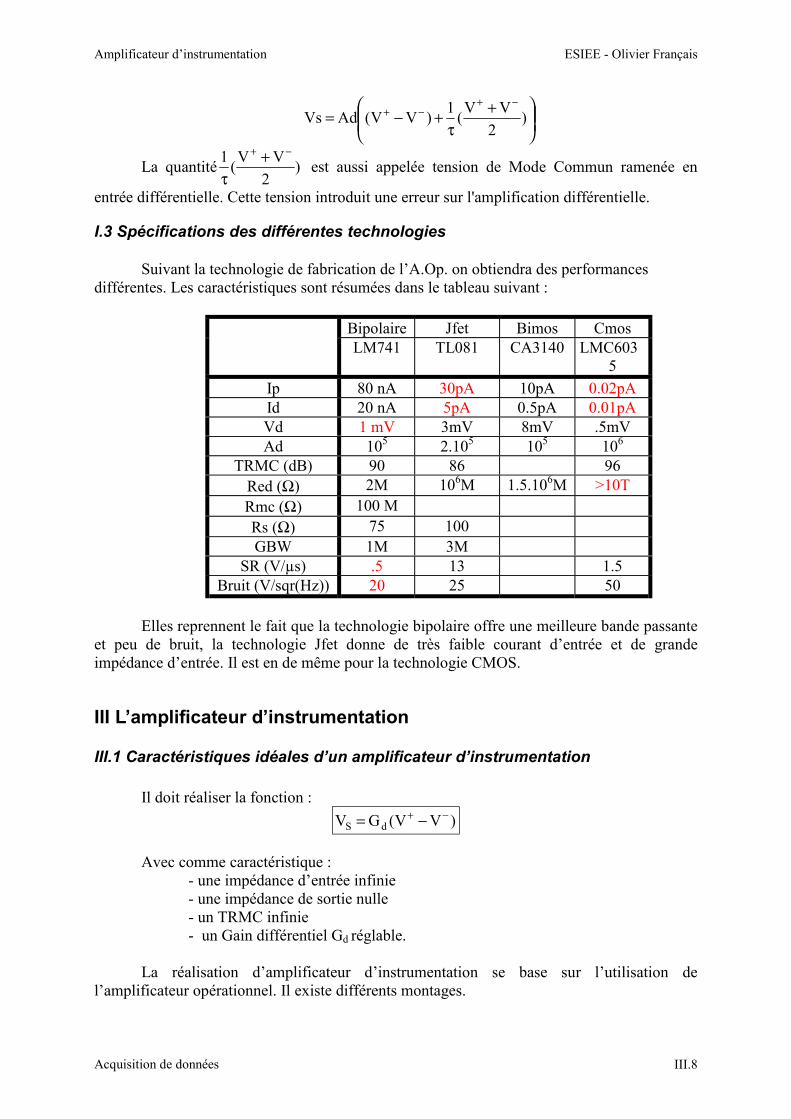
I.3 Spécifications des différentes technologies
Suivant la technologie de fabrication de l’A.Op. on obtiendra des performancesdifférentes. Les caractéristiques sont résumées dans le tableau suivant :
Bipolaire Jfet Bimos CmosLM741 TL081 CA3140 LMC603
5
Ip 80 nA 30pA 10pA 0.02pAId 20 nA 5pA 0.5pA 0.01pAVd 1 mV 3mV 8mV .5mVAd 105 2.105 105 106
TRMC (dB) 90 86 96Red (Ω) 2M 106M 1.5.106M >10TRmc (Ω) 100 MRs (Ω) 75 100GBW 1M 3M
SR (V/µs) .5 13 1.5Bruit (V/sqr(Hz)) 20 25 50
Elles reprennent le fait que la technologie bipolaire offre une meilleure bande passanteet peu de bruit, la technologie Jfet donne de très faible courant d’entrée et de grandeimpédance d’entrée. Il est en de même pour la technologie CMOS.
III L’amplificateur d’instrumentation
III.1 Caractéristiques idéales d’un amplificateur d’instrumentation
Il doit réaliser la fonction :
)VV(GV dS−+ −=
Avec comme caractéristique :- une impédance d’entrée infinie- une impédance de sortie nulle- un TRMC infinie- un Gain différentiel Gd réglable.
La réalisation d’amplificateur d’instrumentation se base sur l’utilisation del’amplificateur opérationnel. Il existe différents montages.
Amplificateur d’instrumentation ESIEE - Olivier Français
Acquisition de données III.9
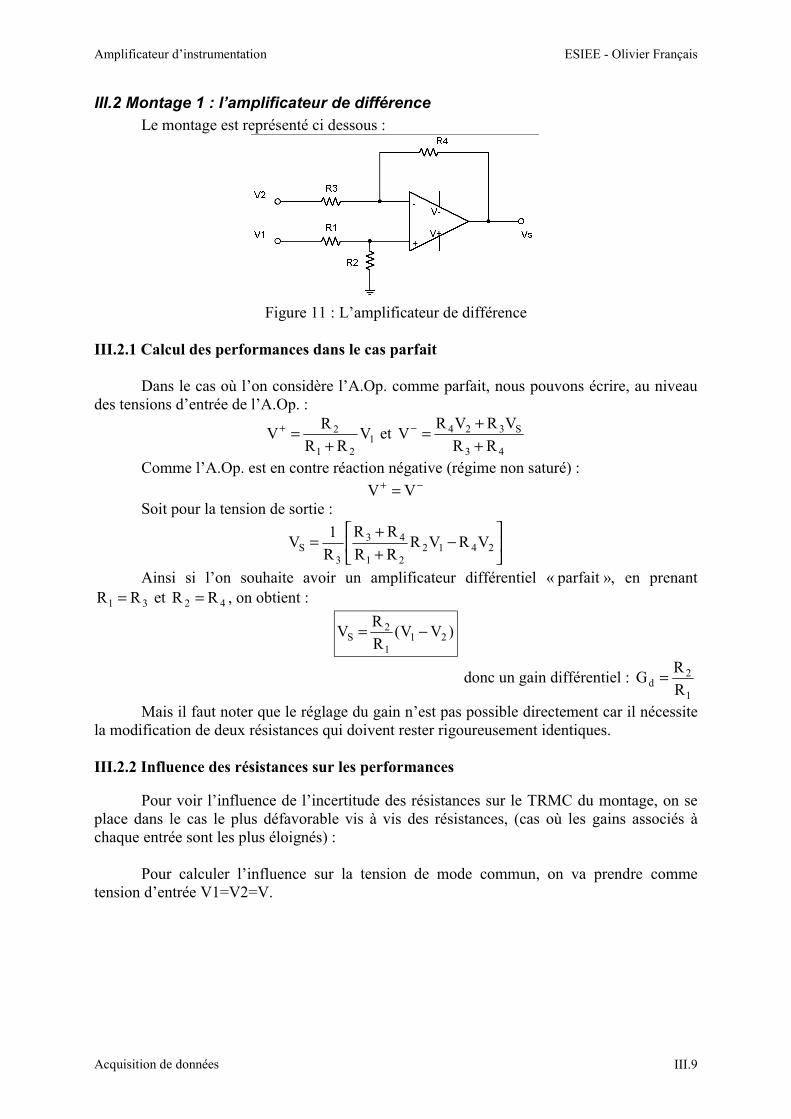
III.2 Montage 1 : l’amplificateur de différenceLe montage est représenté ci dessous :
Figure 11 : L’amplificateur de différence
III.2.1 Calcul des performances dans le cas parfait
Dans le cas où l’on considère l’A.Op. comme parfait, nous pouvons écrire, au niveaudes tensions d’entrée de l’A.Op. :
121
2 VRR
RV
+=+ et
43
S324
RR
VRVRV
++=−
Comme l’A.Op. est en contre réaction négative (régime non saturé) :−+ = VV
Soit pour la tension de sortie :
−
++= 2412
21
43
3S VRVR
RR
RR
R
1V
Ainsi si l’on souhaite avoir un amplificateur différentiel « parfait », en prenant
31 RR = et 42 RR = , on obtient :
)VV(R
RV 21
1
2S −=
donc un gain différentiel : 1
2d R
RG =
Mais il faut noter que le réglage du gain n’est pas possible directement car il nécessitela modification de deux résistances qui doivent rester rigoureusement identiques.
III.2.2 Influence des résistances sur les performances
Pour voir l’influence de l’incertitude des résistances sur le TRMC du montage, on seplace dans le cas le plus défavorable vis à vis des résistances, (cas où les gains associés àchaque entrée sont les plus éloignés) :
Pour calculer l’influence sur la tension de mode commun, on va prendre commetension d’entrée V1=V2=V.
Amplificateur d’instrumentation ESIEE - Olivier Français
Acquisition de données III.10
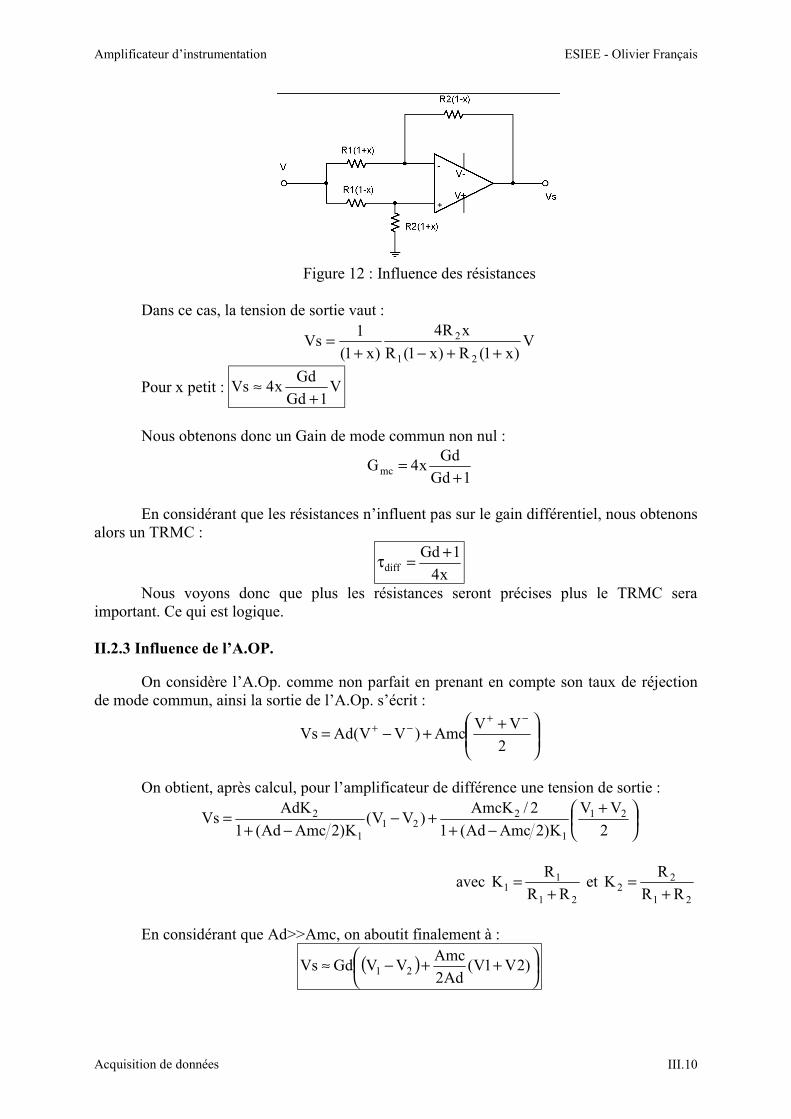
Figure 12 : Influence des résistances
Dans ce cas, la tension de sortie vaut :
V)x1(R)x1(R
xR4
)x1(
1Vs
21
2
++−+=
Pour x petit : V1Gd
Gdx4Vs
+≈
Nous obtenons donc un Gain de mode commun non nul :
1Gd
Gdx4Gmc +
=
En considérant que les résistances n’influent pas sur le gain différentiel, nous obtenonsalors un TRMC :
x4
1Gddiff
+=τ
Nous voyons donc que plus les résistances seront précises plus le TRMC seraimportant. Ce qui est logique.
II.2.3 Influence de l’A.OP.
On considère l’A.Op. comme non parfait en prenant en compte son taux de réjectionde mode commun, ainsi la sortie de l’A.Op. s’écrit :
++−=−+
−+
2
VVAmc)VV(AdVs
On obtient, après calcul, pour l’amplificateur de différence une tension de sortie :
+
−++−
−+=
2
VV
K)2AmcAd(1
2/AmcK)VV(
K)2AmcAd(1
AdKVs 21
1
221
1
2
avec 21
11 RR
RK
+= et
21
22 RR
RK
+=
En considérant que Ad>>Amc, on aboutit finalement à :
( )
++−≈ )2V1V(
Ad2
AmcVVGdVs 21
Amplificateur d’instrumentation ESIEE - Olivier Français
Acquisition de données III.11
On obtient donc pour le montage différentiel un taux de réjection de mode commun :
.Op.Adiff Amc
Ad2 τ==τ
Les performances en terme de TRMC de ce type d’amplificateur de différence vis àvis de l’A.Op sont identiques. Le défaut de l’A.Op se retrouve directement dans le montage,et ceci quelque soit le gain Gd du montage.
Ex : Ad=106 V1-V2=.1mV Vs=100mV + 50mV !Amc=10 V1+V2=10VGd=1000
Ce type de montage ne convient pas pour des tensions de mesures très faibles (<mV).
II.2.4 Impédance d’entrée
Chaque voie d’entrée voit une impédance différente :Entrée non inverseuse : 2R1R1Ze += .Entrée inverseuse : Ze2=R1.
L’impédance d’entrée n’est pas symétrique, de plus elle dépend de la valeur desrésistances employées, qui pour des limitations de bruit thermique et de réponse en fréquencesont en général de valeurs bien inférieures au MΩ.
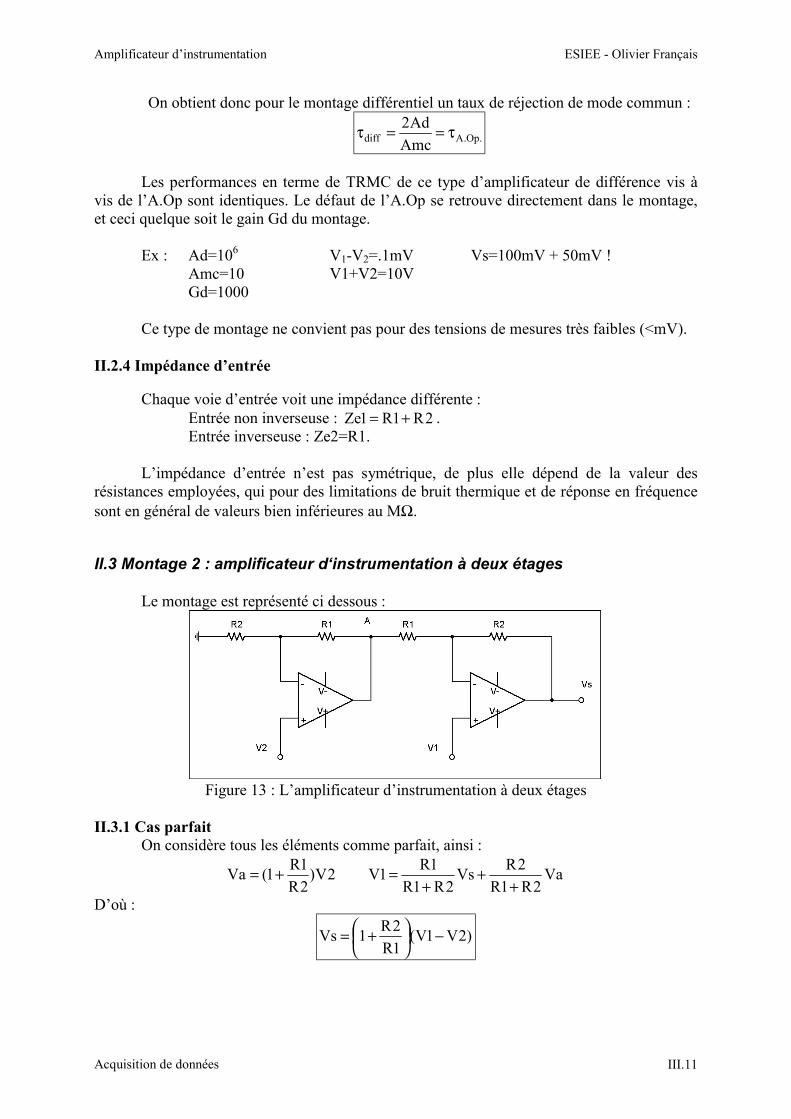
II.3 Montage 2 : amplificateur d‘instrumentation à deux étages
Le montage est représenté ci dessous :
Figure 13 : L’amplificateur d’instrumentation à deux étages
II.3.1 Cas parfaitOn considère tous les éléments comme parfait, ainsi :
2V)2R
1R1(Va += Va
2R1R
2RVs
2R1R
1R1V
++
+=
D’où :
)2V1V(1R
2R1Vs −
+=
Amplificateur d’instrumentation ESIEE - Olivier Français
Acquisition de données III.12
Le gain différentiel est donc :
+=
1R
2R1Gd
On obtient une amplification différentielle mais dont le gain est lié à quatre résistances(identiques deux à deux). Par contre, les impédances d’entrées sont ici très grandes etuniquement liées aux A.Op.
II.3.2 Influence des résistances
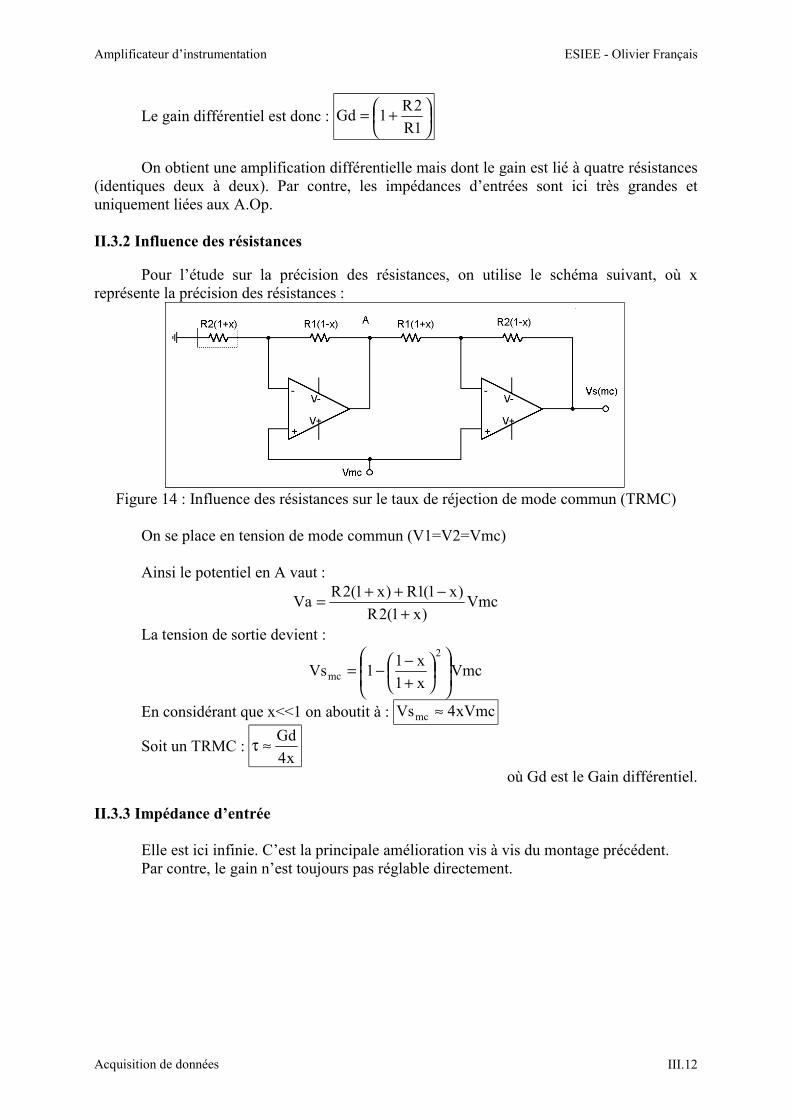
Pour l’étude sur la précision des résistances, on utilise le schéma suivant, où xreprésente la précision des résistances :
Figure 14 : Influence des résistances sur le taux de réjection de mode commun (TRMC)
On se place en tension de mode commun (V1=V2=Vmc)
Ainsi le potentiel en A vaut :
Vmc)x1(2R
)x1(1R)x1(2RVa
+−++=
La tension de sortie devient :
Vmcx1
x11Vs
2
mc
+−−=
En considérant que x<<1 on aboutit à : xVmc4Vsmc ≈
Soit un TRMC : x4
Gd≈τ
où Gd est le Gain différentiel.
II.3.3 Impédance d’entrée
Elle est ici infinie. C’est la principale amélioration vis à vis du montage précédent.Par contre, le gain n’est toujours pas réglable directement.
Amplificateur d’instrumentation ESIEE - Olivier Français
Acquisition de données III.13
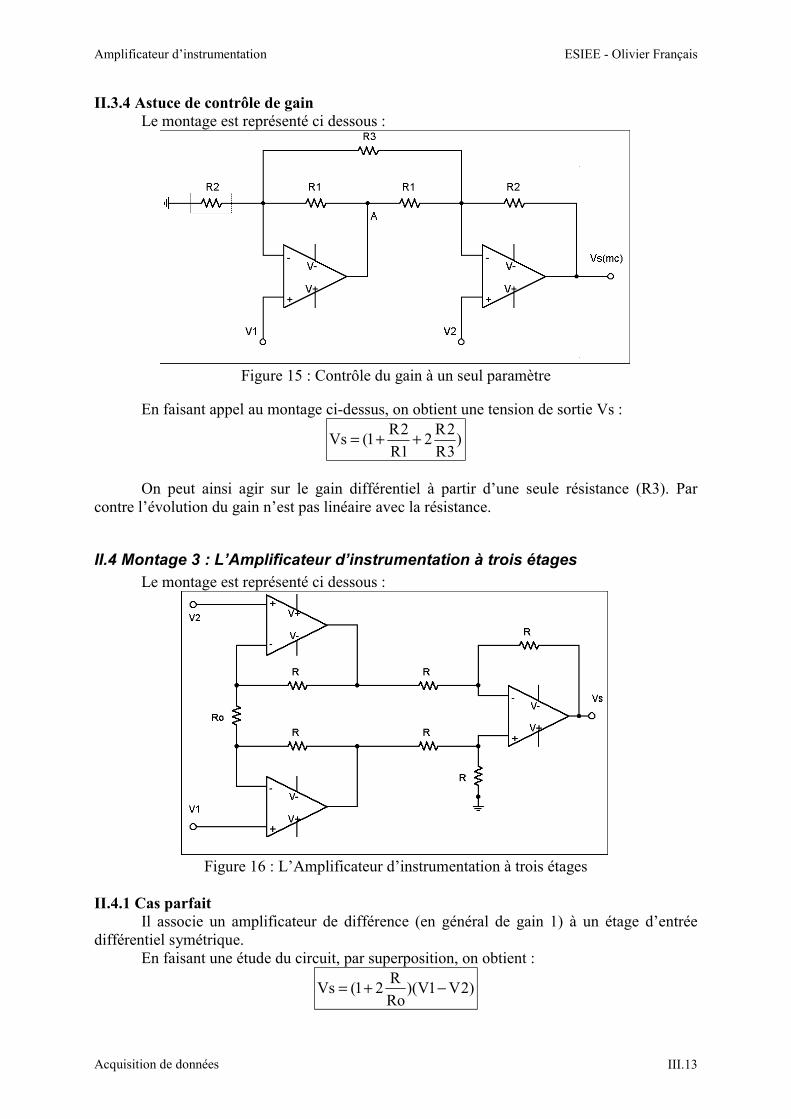
II.3.4 Astuce de contrôle de gainLe montage est représenté ci dessous :
Figure 15 : Contrôle du gain à un seul paramètre
En faisant appel au montage ci-dessus, on obtient une tension de sortie Vs :
)3R
2R2
1R
2R1(Vs ++=
On peut ainsi agir sur le gain différentiel à partir d’une seule résistance (R3). Parcontre l’évolution du gain n’est pas linéaire avec la résistance.
II.4 Montage 3 : L’Amplificateur d’instrumentation à trois étagesLe montage est représenté ci dessous :
Figure 16 : L’Amplificateur d’instrumentation à trois étages
II.4.1 Cas parfait Il associe un amplificateur de différence (en général de gain 1) à un étage d’entrée
différentiel symétrique.En faisant une étude du circuit, par superposition, on obtient :
)2V1V)(Ro
R21(Vs −+=

Amplificateur d’instrumentation ESIEE - Olivier Français
Acquisition de données III.14
On a donc un gain réglable à l’aide d’une seule résistance (Ro). Ce circuit est réaliséde manière intégré permettant ainsi une très grande précision sur les résistances R ainsiqu’une très bonne stabilité thermique.
Le gain est réglé par l’intermédiaire de la résistance Ro qui peut venir se connecter auxbornes du C.I. ou bien être intégrée.
On remarquera que le premier étage de l’A.I. ne génère pas d’erreur de mode communde par sa symétrie. Si V1=V2=V, on retrouve V en entrée de l’amplificateur de différence(cas A.Op parfait).
II.4.2 Défaut du à l’A.Op de sortie
Si on prend en compte le défaut de l’A.Op. au niveau de l’amplificateur de différence,la tension de sortie devient :
)2V1V(1
)2V1V)(Ro
R21(Vs
.Op.A
+τ
+−+=
Cette fois le taux de réjection de l’A.I. est amélioré vis à vis du TRMC de l’A.Op.
)Ro
R21(Op.AAI +τ=τ
Cela permet d’obtenir des taux de réjection de mode commun supérieurs à 100dB,contrairement aux montages précédents.
IV amplificateur d’isolements
Dans le cas de très fortes tensions de mode commun (>2kV) ou de tensions de mesuretrès faibles (<µV), on est amené à utiliser des amplicateurs d’isolement qui présentent desTRMC supérieurs à 160dB :
Figure 17 : l’amplificateur d’isolement
Une isolation « physique » est réalisée entre l’entrée différentielle et la sortie. Laréalisation de cette isolation peut être de différent type :
- isolation par transformateur : Basse fréquence (<20kHz) et haute tension (10kV),- isolation optique : Haute fréquence (100kHz) et basse tension (1kV),- isolation capacitive : entre les deux !
CHAPITRE IV
Echantillonneur Bloqueur
Olivier Français, 2000
Echantillonneur – Bloqueur ESIEE - Olivier Français
Acquisition de données IV.2
SOMMAIRE
I RÔLE ................................................................................................................................................................... 3
II UTILITÉ ............................................................................................................................................................ 3
III PRINCIPE ........................................................................................................................................................ 4
INTERRUPTEUR FERMÉ : ....................................................................................................................................... 4INTERRUPTEUR OUVERT : ..................................................................................................................................... 4
IV CAS RÉEL........................................................................................................................................................ 5
PRÉSENCE D’UNE RÉSISTANCE D’ENTRÉE : RON..................................................................................................... 5
V CONSTITUTION DE L’E/B ............................................................................................................................ 6
VI ERREUR INTRODUITE PAR L’E/B............................................................................................................ 6
VI.1 ECHANTILLONNAGE ..................................................................................................................................... 7VI.2 ECHANTILLONNAGE BLOCAGE..................................................................................................................... 7VI.3 BLOCAGE ..................................................................................................................................................... 8VI.4 BLOCAGE ECHANTILLONNAGE..................................................................................................................... 8VI.5 SYNTHÈSE .................................................................................................................................................... 9
VII EXEMPLE DE CARACTÉRISTIQUES...................................................................................................... 9
Echantillonneur – Bloqueur ESIEE - Olivier Français
Acquisition de données IV.3
ECHANTILLONNEUR - BLOQUEUR
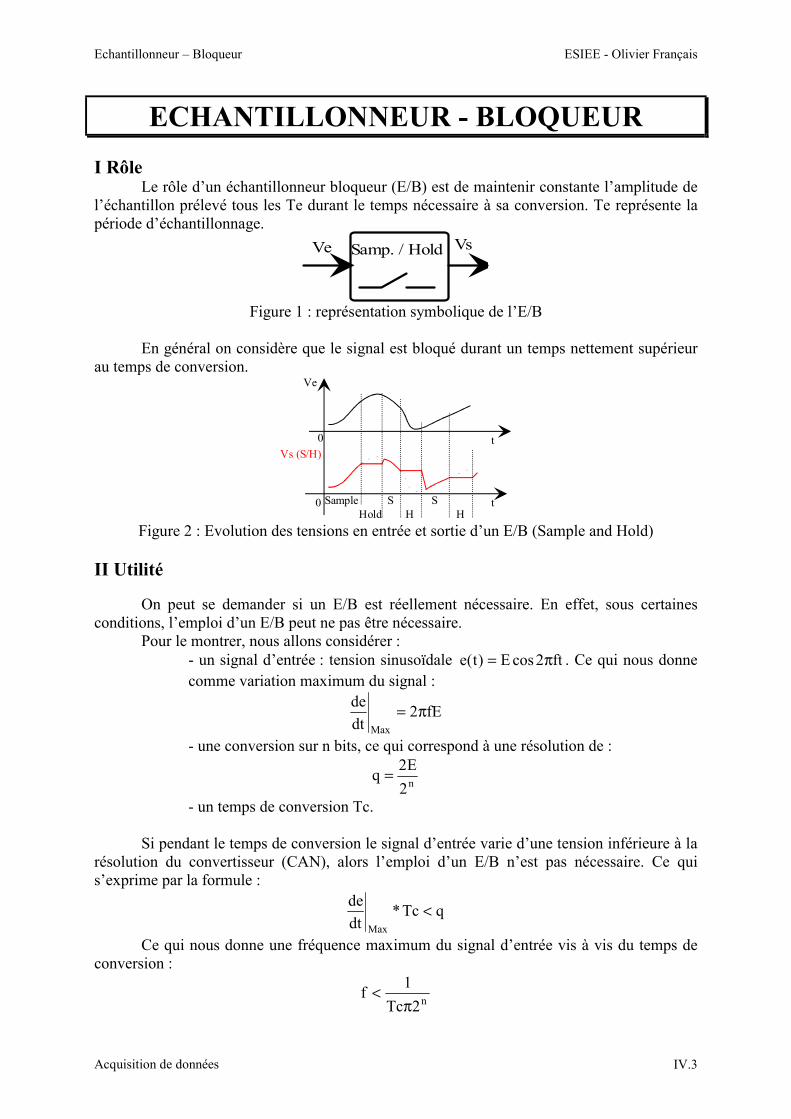
I RôleLe rôle d’un échantillonneur bloqueur (E/B) est de maintenir constante l’amplitude de
l’échantillon prélevé tous les Te durant le temps nécessaire à sa conversion. Te représente lapériode d’échantillonnage.
Samp. / HoldVe Vs
Figure 1 : représentation symbolique de l’E/B
En général on considère que le signal est bloqué durant un temps nettement supérieurau temps de conversion.
SampleHold
SH
SH
Ve
Vs (S/H)
0
0
t
t
Figure 2 : Evolution des tensions en entrée et sortie d’un E/B (Sample and Hold)
II Utilité
On peut se demander si un E/B est réellement nécessaire. En effet, sous certainesconditions, l’emploi d’un E/B peut ne pas être nécessaire.
Pour le montrer, nous allons considérer :- un signal d’entrée : tension sinusoïdale ft2cosE)t(e π= . Ce qui nous donnecomme variation maximum du signal :
fE2dt
de
Max
π=
- une conversion sur n bits, ce qui correspond à une résolution de :
n2
E2q =
- un temps de conversion Tc.
Si pendant le temps de conversion le signal d’entrée varie d’une tension inférieure à larésolution du convertisseur (CAN), alors l’emploi d’un E/B n’est pas nécessaire. Ce quis’exprime par la formule :
qTc*dt
de
Max
<
Ce qui nous donne une fréquence maximum du signal d’entrée vis à vis du temps deconversion :
n2Tc
1f
π<
Echantillonneur – Bloqueur ESIEE - Olivier Français
Acquisition de données IV.4
Exemple : Cas d’une conversion sur 8 bits sans utilisation de bloqueur :Tc=1ms ⇒ f<1.2HzTc=1µs ⇒ f<1.2kHz
Dans le cas de signaux variant très lentement, ne nécessitant pas de grandes précisionstemporelles (cas de la température), on peut envisager de ne pas utiliser d’E/B. Mais demanière générale, les échantillonneurs - bloqueurs sont pratiquement nécessaires dans touteopération de conversion.
III Principe
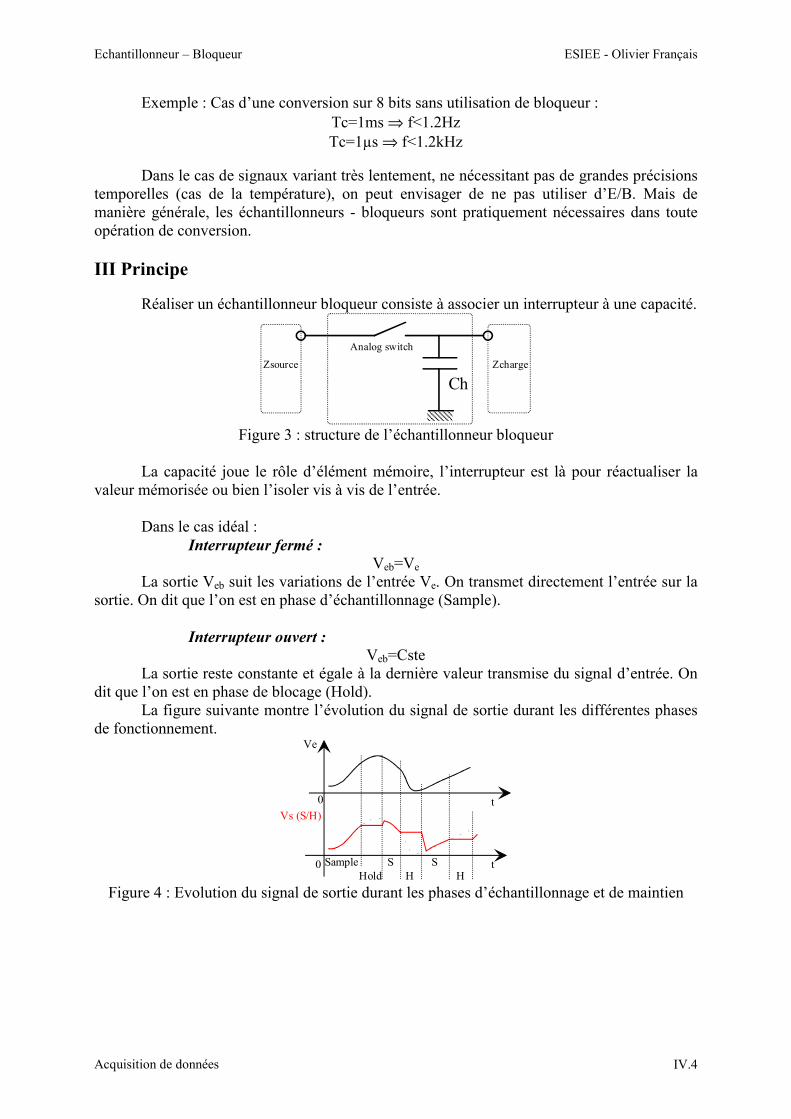
Réaliser un échantillonneur bloqueur consiste à associer un interrupteur à une capacité.
ChZsource Zcharge
Analog switch
Figure 3 : structure de l’échantillonneur bloqueur
La capacité joue le rôle d’élément mémoire, l’interrupteur est là pour réactualiser lavaleur mémorisée ou bien l’isoler vis à vis de l’entrée.
Dans le cas idéal :Interrupteur fermé :
Veb=Ve
La sortie Veb suit les variations de l’entrée Ve. On transmet directement l’entrée sur lasortie. On dit que l’on est en phase d’échantillonnage (Sample).
Interrupteur ouvert :Veb=Cste
La sortie reste constante et égale à la dernière valeur transmise du signal d’entrée. Ondit que l’on est en phase de blocage (Hold).
La figure suivante montre l’évolution du signal de sortie durant les différentes phasesde fonctionnement.
SampleHold
SH
SH
Ve
Vs (S/H)
0
0
t
t
Figure 4 : Evolution du signal de sortie durant les phases d’échantillonnage et de maintien

Echantillonneur – Bloqueur ESIEE - Olivier Français
Acquisition de données IV.5
IV Cas réelL’utilisation d’un interrupteur et d’une capacité introduisent des limitations en terme
de rapidité et de maintien :
Présence d’une résistance d’entrée : Ron
Cette résistance représente à la fois la résistance de sortie du montage en amontde l’E/B mise en série avec la résistance d’état passant de l’interrupteur. Cette résistance valimiter la possibilité du suivi de la tension. En effet la capacité se charge au travers de cetterésistance. On obtient donc une constante de temps :
CR oneargch =τ
Présence d’une résistance de sortie : Rch
Cette résistance est due à la résistance d’entrée du montage en aval de l’E/Bassociée à la résistance modélisant les pertes de la capacité. Cela introduit une limitation dumaintien de la tension lors de la phase de blocage due à la décharge de la capacité dans cetterésistance :
CR cheargdéch =τ
Figure 5 : Modèle équivalent de l’E/B
Ainsi, en exagérant les constantes de temps de charge et décharge liées aucondensateur, l’évolution du signal de sortie correspondant à un signal d’entrée échantillonné-bloqué devient :
Veb
Ve
E B E B E B
t
τ
τch
dech
0
Figure 6 : Influence des constantes de temps de l’E/B
On voit apparaître les deux grandes limitations d’un E/B. Sa vitesse de fonctionnementva être liée à la constante de charge (limitation de la fréquence d’échantillonnage). Sa capacitéà maintenir l’échantillon va être liée à la constante de décharge (limitation de la résolutionobtenue).
Echantillonneur – Bloqueur ESIEE - Olivier Français
Acquisition de données IV.6
V Constitution de l’E/B
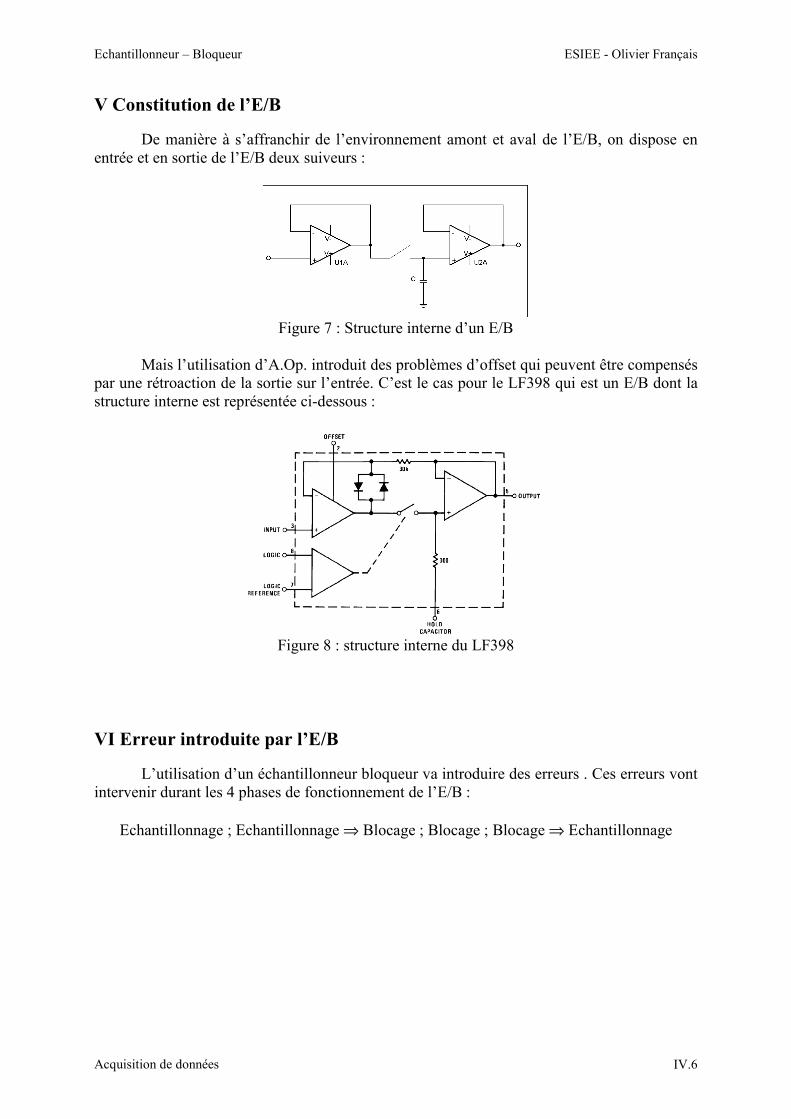
De manière à s’affranchir de l’environnement amont et aval de l’E/B, on dispose enentrée et en sortie de l’E/B deux suiveurs :
Figure 7 : Structure interne d’un E/B
Mais l’utilisation d’A.Op. introduit des problèmes d’offset qui peuvent être compenséspar une rétroaction de la sortie sur l’entrée. C’est le cas pour le LF398 qui est un E/B dont lastructure interne est représentée ci-dessous :
Figure 8 : structure interne du LF398
VI Erreur introduite par l’E/B
L’utilisation d’un échantillonneur bloqueur va introduire des erreurs . Ces erreurs vontintervenir durant les 4 phases de fonctionnement de l’E/B :
Echantillonnage ; Echantillonnage ⇒ Blocage ; Blocage ; Blocage ⇒ Echantillonnage
Echantillonneur – Bloqueur ESIEE - Olivier Français
Acquisition de données IV.7
VI.1 Echantillonnage
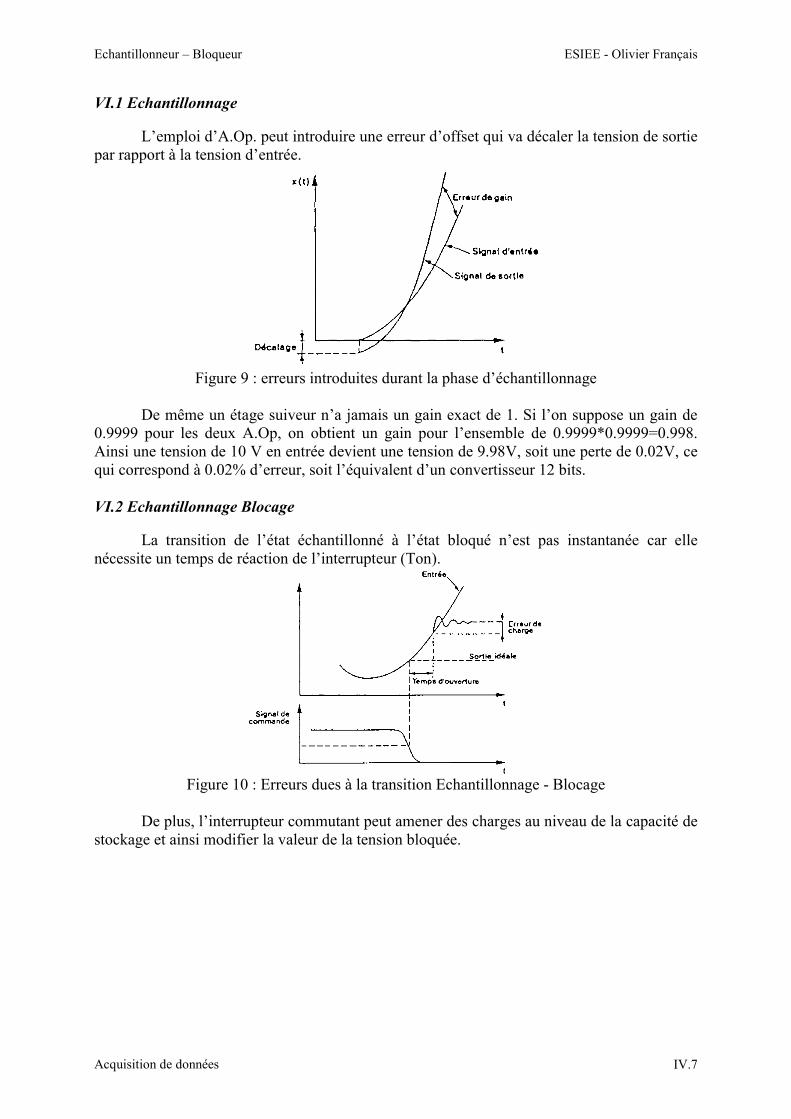
L’emploi d’A.Op. peut introduire une erreur d’offset qui va décaler la tension de sortiepar rapport à la tension d’entrée.
Figure 9 : erreurs introduites durant la phase d’échantillonnage
De même un étage suiveur n’a jamais un gain exact de 1. Si l’on suppose un gain de0.9999 pour les deux A.Op, on obtient un gain pour l’ensemble de 0.9999*0.9999=0.998.Ainsi une tension de 10 V en entrée devient une tension de 9.98V, soit une perte de 0.02V, cequi correspond à 0.02% d’erreur, soit l’équivalent d’un convertisseur 12 bits.
VI.2 Echantillonnage Blocage
La transition de l’état échantillonné à l’état bloqué n’est pas instantanée car ellenécessite un temps de réaction de l’interrupteur (Ton).
Figure 10 : Erreurs dues à la transition Echantillonnage - Blocage
De plus, l’interrupteur commutant peut amener des charges au niveau de la capacité destockage et ainsi modifier la valeur de la tension bloquée.
Echantillonneur – Bloqueur ESIEE - Olivier Français
Acquisition de données IV.8
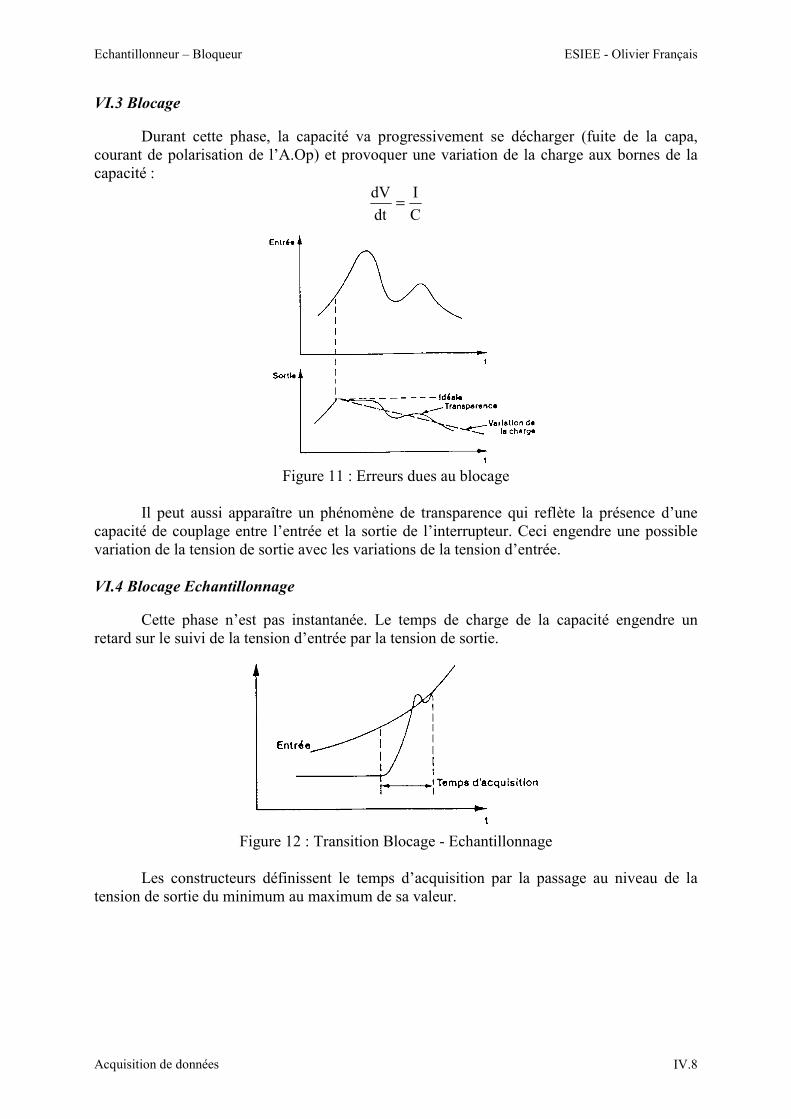
VI.3 Blocage
Durant cette phase, la capacité va progressivement se décharger (fuite de la capa,courant de polarisation de l’A.Op) et provoquer une variation de la charge aux bornes de lacapacité :
C
I
dt
dV =
Figure 11 : Erreurs dues au blocage
Il peut aussi apparaître un phénomène de transparence qui reflète la présence d’unecapacité de couplage entre l’entrée et la sortie de l’interrupteur. Ceci engendre une possiblevariation de la tension de sortie avec les variations de la tension d’entrée.
VI.4 Blocage Echantillonnage
Cette phase n’est pas instantanée. Le temps de charge de la capacité engendre unretard sur le suivi de la tension d’entrée par la tension de sortie.
Figure 12 : Transition Blocage - Echantillonnage
Les constructeurs définissent le temps d’acquisition par la passage au niveau de latension de sortie du minimum au maximum de sa valeur.
Echantillonneur – Bloqueur ESIEE - Olivier Français
Acquisition de données IV.9
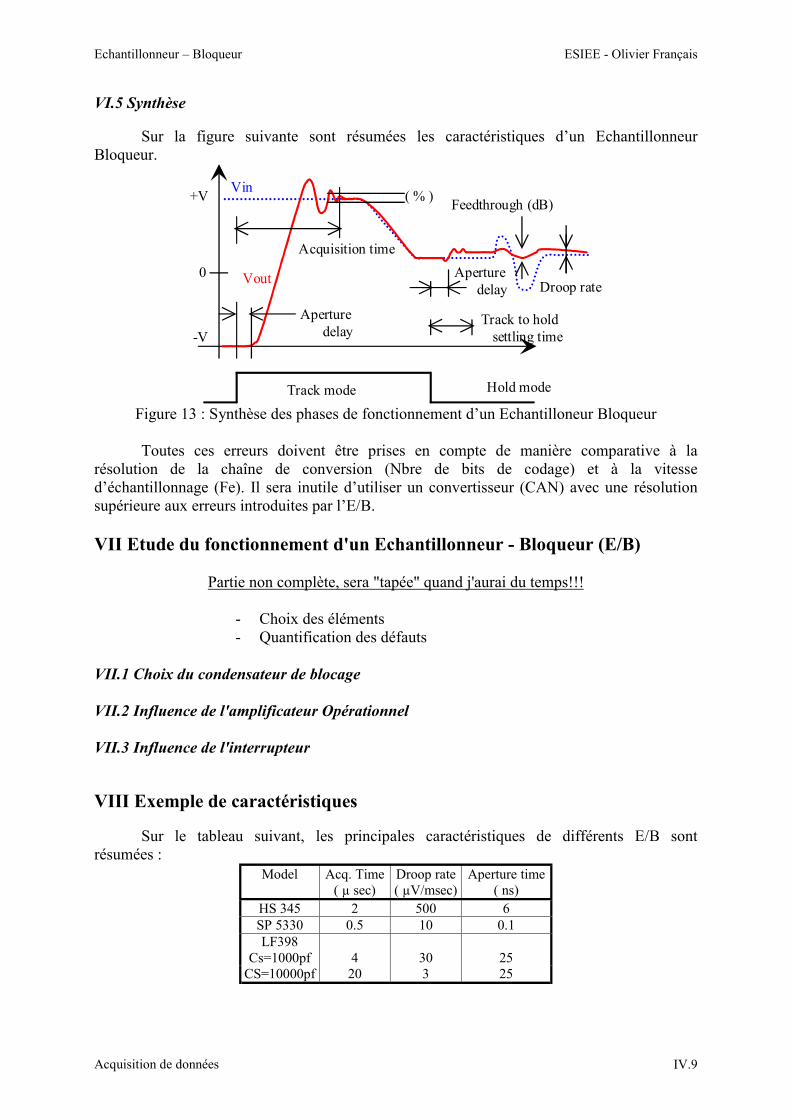
VI.5 Synthèse
Sur la figure suivante sont résumées les caractéristiques d’un EchantillonneurBloqueur.
Droop rate
Feedthrough (dB)
Aperture delay
Track to hold settling time
Track mode Hold mode
-V
+V
0
Vin
Vout
Acquisition time
( % )
Aperture delay
Figure 13 : Synthèse des phases de fonctionnement d’un Echantilloneur Bloqueur
Toutes ces erreurs doivent être prises en compte de manière comparative à larésolution de la chaîne de conversion (Nbre de bits de codage) et à la vitessed’échantillonnage (Fe). Il sera inutile d’utiliser un convertisseur (CAN) avec une résolutionsupérieure aux erreurs introduites par l’E/B.
VII Etude du fonctionnement d'un Echantillonneur - Bloqueur (E/B)
Partie non complète, sera "tapée" quand j'aurai du temps!!!
- Choix des éléments- Quantification des défauts
VII.1 Choix du condensateur de blocage
VII.2 Influence de l'amplificateur Opérationnel
VII.3 Influence de l'interrupteur
VIII Exemple de caractéristiques
Sur le tableau suivant, les principales caractéristiques de différents E/B sontrésumées :
Model Acq. Time( µ sec)
Droop rate( µV/msec)
Aperture time( ns)
HS 345 2 500 6SP 5330 0.5 10 0.1LF398
Cs=1000pf 4 30 25CS=10000pf 20 3 25
Echantillonneur – Bloqueur ESIEE - Olivier Français
Acquisition de données IV.10
Les E/B HS 345 et SP5330 sont des E/B à capacité de bloquage intégrée, il n’y a pasde possibilité de venir la modifier. Par contre pour le LF398, il est possible de modifier savaleur.Remarque :
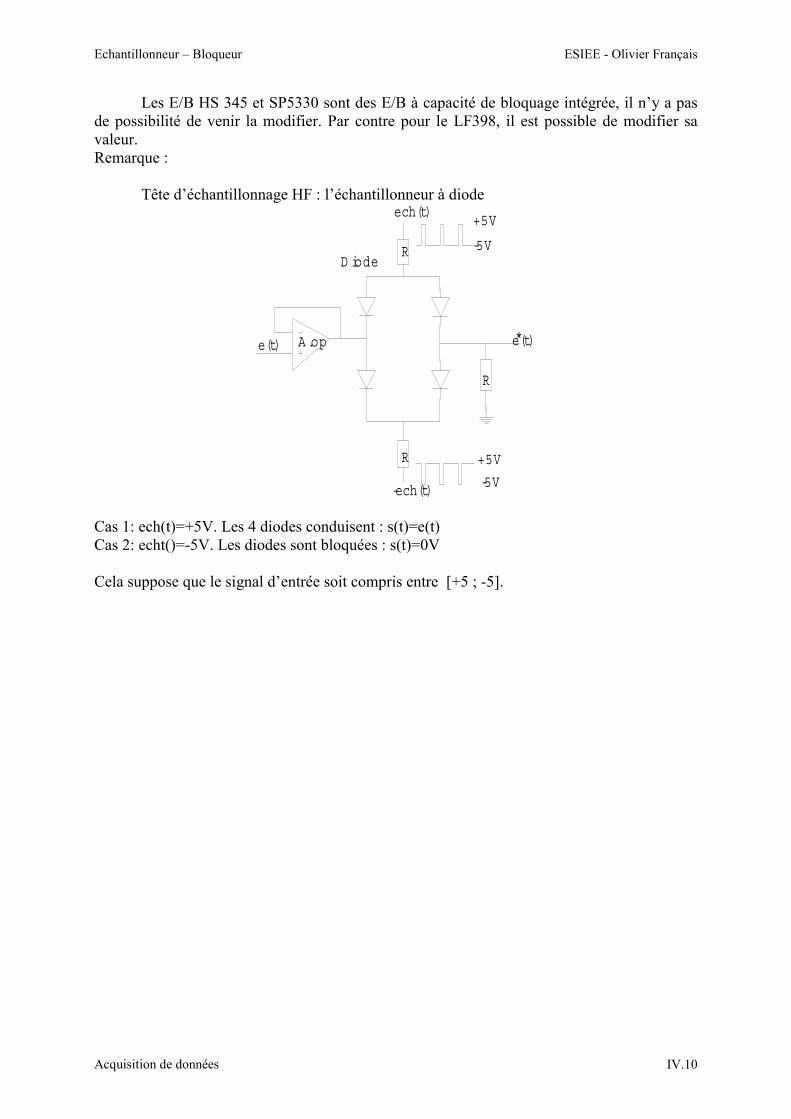
Tête d’échantillonnage HF : l’échantillonneur à diode
D iode
R
R
R
A .ope(t) e(t)*
+5V
-5V
+5V
-5V
ech(t)
-ech(t)
Cas 1: ech(t)=+5V. Les 4 diodes conduisent : s(t)=e(t)Cas 2: echt()=-5V. Les diodes sont bloquées : s(t)=0V
Cela suppose que le signal d’entrée soit compris entre [+5 ; -5].
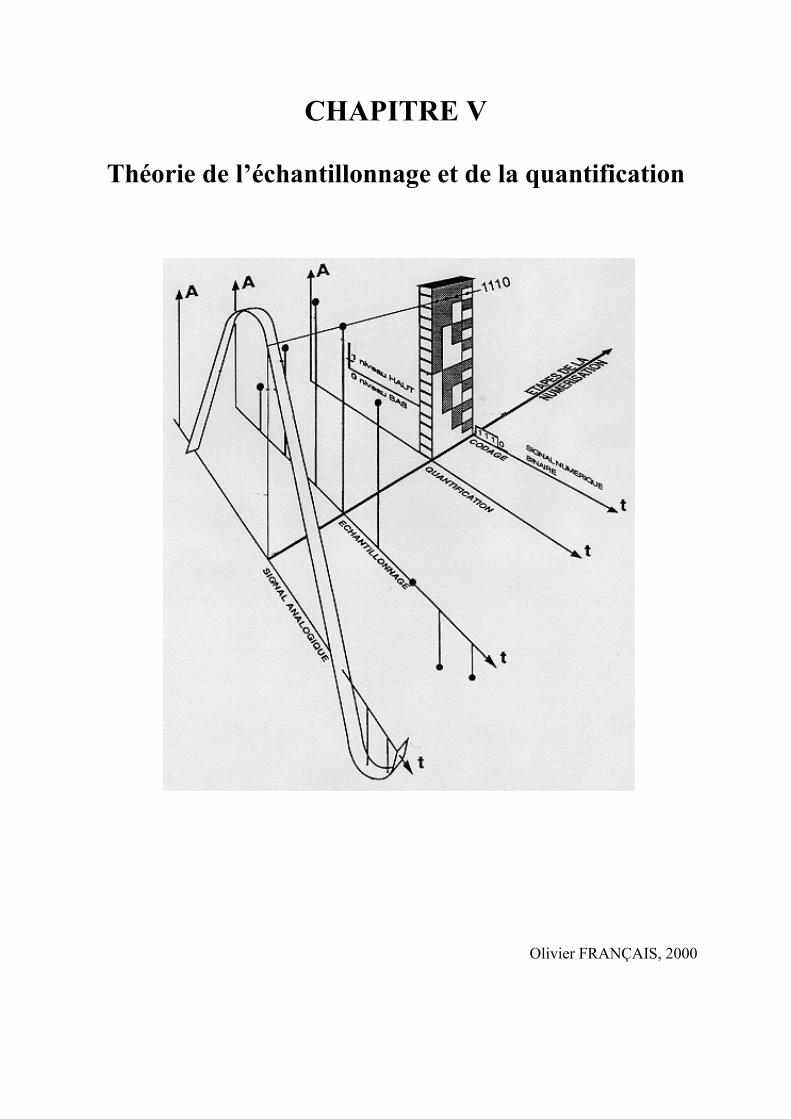
CHAPITRE V
Théorie de l’échantillonnage et de la quantification
Olivier FRANÇAIS, 2000
Théorie de la quantification et de l’échantillonnage ESIEE - Olivier Français
Acquisition de données V.2
SOMMAIRE
I INTRODUCTION............................................................................................................................................... 3
II THÉORIE DE L’ÉCHANTILLONNAGE...................................................................................................... 3
II.1 ACQUISITION DES SIGNAUX........................................................................................................................... 3II.2 MODÉLISATION DE L’ÉCHANTILLONNAGE ..................................................................................................... 4II.3 NOTION DE REPLIEMENT DE SPECTRE ............................................................................................................ 4II.4 THÉORÈME DE SHANNON............................................................................................................................... 5II.5 L’ÉCHANTILLONNAGE BLOCAGE.................................................................................................................... 5II.6 MODÉLISATION DE L’ÉCHANTILLONNEUR BLOQUEUR ................................................................................... 5II.7 NÉCESSITÉ DU FILTRE D’ANTI-REPLIEMENT................................................................................................... 6
II.7.1 Caractéristiques idéales......................................................................................................................... 6II.7.2 Filtre réel ............................................................................................................................................... 7
III THÉORIE DE LA QUANTIFICATION....................................................................................................... 8
III.1 PRINCIPE ...................................................................................................................................................... 8III.2 BRUIT DE QUANTIFICATION .......................................................................................................................... 9III.3 CARACTÉRISTIQUES DU BRUIT DE QUANTIFICATION..................................................................................... 9
III.3.1 Quantification linéaire par défaut ........................................................................................................ 9III.3.2 Quantification linéaire centrée........................................................................................................... 10III.3.3 Quantification non linéaire ................................................................................................................ 10
III.4 CHOIX DU NOMBRE DE BITS DE QUANTIFICATION ....................................................................................... 11III.4.1 Choix classique................................................................................................................................... 11III.4.2 Prise en compte du rapport signal sur bruit....................................................................................... 11
IV PRINCIPE DE CODAGE ............................................................................................................................. 12
IV.1 CODAGE UNIPOLAIRE ................................................................................................................................. 12IV.1.1 Binaire naturel.................................................................................................................................... 12IV.1.2 DCB .................................................................................................................................................... 13IV.1.3 Code de Gray ou réfléchi.................................................................................................................... 13
IV.2 CODAGE BIPOLAIRE.................................................................................................................................... 13IV.2.1 Code amplitude de signe..................................................................................................................... 13IV.2.2 Code binaire décalé ............................................................................................................................ 13IV.2.3 Code complément à deux .................................................................................................................... 14IV.2.4 Code complément à un........................................................................................................................ 14
ANNEXE A .......................................................................................................................................................... 15
RAPPEL TRAITEMENT DU SIGNAL............................................................................................................ 15
OUTILS MATHÉMATIQUES .......................................................................................................................... 15
I LA TRANSFORMÉE DE FOURIER ............................................................................................................. 15
I.1 DÉFINITION DE LA TRANSFORMÉE DE FOURIER ............................................................................................. 15I.2 PROPRIÉTÉS DE LA TRANSFORMÉE DE FOURIER ............................................................................................ 15II.3 LE PRODUIT DE CONVOLUTION .................................................................................................................... 15II.4 L'IMPULSION DE DIRAC (δ(T))...................................................................................................................... 16II.5 LE PEIGNE DE DIRAC.................................................................................................................................... 16
ANNEXE B .......................................................................................................................................................... 17
I EXEMPLE DE FILTRE PASSE-BAS D'ORDRE 2...................................................................................... 17
II EXEMPLE DE SYNTHÈSE DE FILTRE .................................................................................................... 17
II.1 GABARIT DU FILTRE DE TYPE BUTTERWORTH .............................................................................................. 17
Théorie de la quantification et de l’échantillonnage ESIEE - Olivier Français
Acquisition de données V.3
THEORIE DE L’ECHANTILLONNAGE ETDE LA QUANTIFICATION
I Introduction
L’objectif de cette partie est de mettre en place les outils mathématiques permettant demodéliser l’acquisition numérique de signaux analogiques.
Le but est de comprendre :- Le choix de Te, période d’échantillonnage.- Le Choix de n, nombre de bit de code.- L’influence de l’échantillonnage sur les propriétés d’un signal.
Nous devrons garder à l’esprit le fait que l’acquisition numérique ne doit pas détériorerle signal. On doit conserver au travers de la numérisation l’information utile :
Voix : [0 ;20kHz] ; Vidéo [0 6MHz]
De plus, il faut limiter l’espace mémoire nécessaire au stockage. En effet, il fautstocker « n*Fe » bits par seconde. On s’attachera dans une chaîne d’acquisition à minimisercette valeur tout en ne détériorant pas le signal.
II Théorie de l’échantillonnage
En annexe, vous trouverez les rappels permettant de mettre en place la théorie del’échantillonnage. Pour plus d’informations vous pouvez vous référer au cours de Traitementdu Signal (G-Signal).
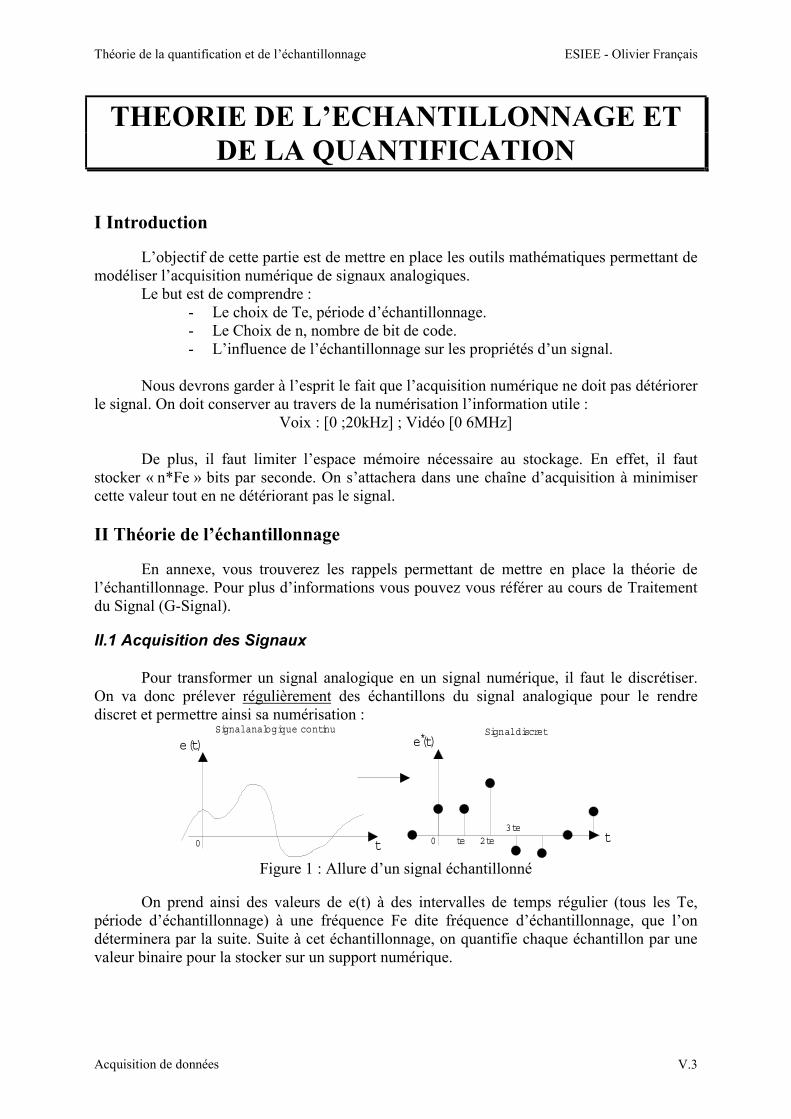
II.1 Acquisition des Signaux
Pour transformer un signal analogique en un signal numérique, il faut le discrétiser.On va donc prélever régulièrement des échantillons du signal analogique pour le rendrediscret et permettre ainsi sa numérisation :
t
e(t)
t
e(t)*
te 2te3te
0 0
Signal analogique continu Signal discret
Figure 1 : Allure d’un signal échantillonné
On prend ainsi des valeurs de e(t) à des intervalles de temps régulier (tous les Te,période d’échantillonnage) à une fréquence Fe dite fréquence d’échantillonnage, que l’ondéterminera par la suite. Suite à cet échantillonnage, on quantifie chaque échantillon par unevaleur binaire pour la stocker sur un support numérique.
Théorie de la quantification et de l’échantillonnage ESIEE - Olivier Français
Acquisition de données V.4
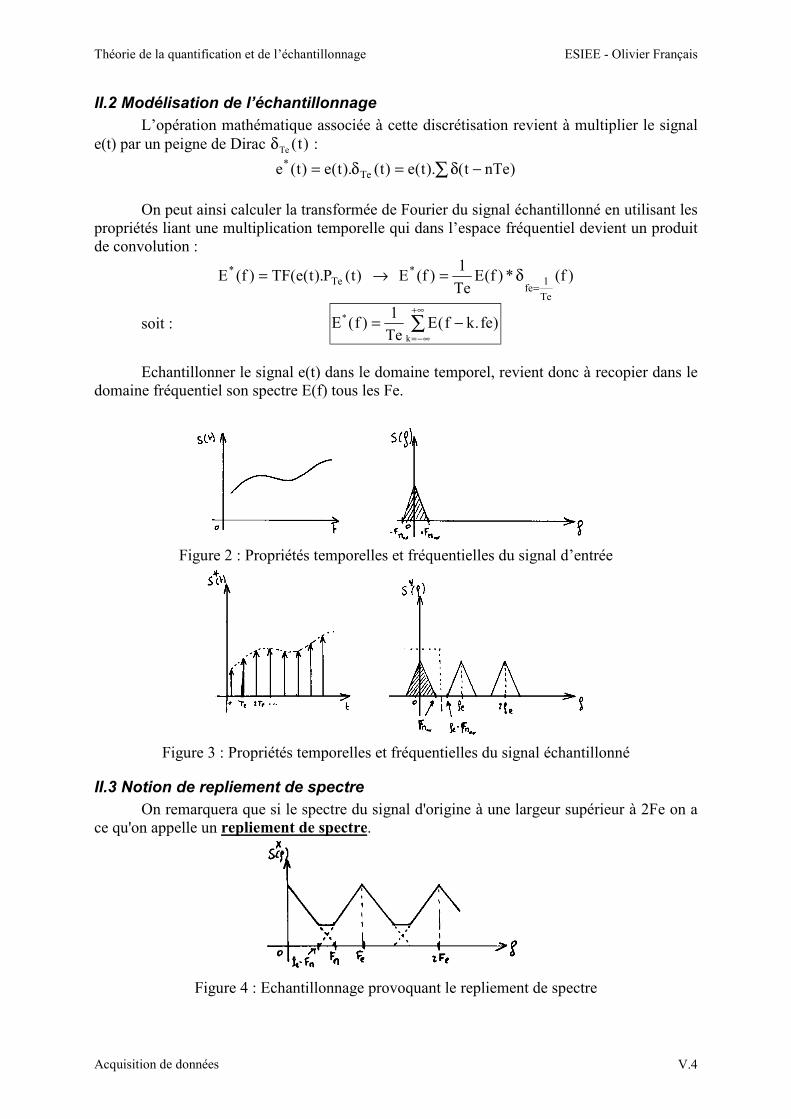
II.2 Modélisation de l’échantillonnageL’opération mathématique associée à cette discrétisation revient à multiplier le signal
e(t) par un peigne de Dirac δTe t( ) :
∑ −δ=δ= )nTet().t(e)t().t(e)t(e Te*
On peut ainsi calculer la transformée de Fourier du signal échantillonné en utilisant lespropriétés liant une multiplication temporelle qui dans l’espace fréquentiel devient un produitde convolution :
)t(P).t(e(TF)f(E Te* = → )f(*)f(E
Te
1)f(E
Te
1fe
*
=δ=
soit : E fTe
E f k fek
* ( ) ( . )= −=−∞
+∞
∑1
Echantillonner le signal e(t) dans le domaine temporel, revient donc à recopier dans ledomaine fréquentiel son spectre E(f) tous les Fe.
Figure 2 : Propriétés temporelles et fréquentielles du signal d’entrée
Figure 3 : Propriétés temporelles et fréquentielles du signal échantillonné
II.3 Notion de repliement de spectreOn remarquera que si le spectre du signal d'origine à une largeur supérieur à 2Fe on a
ce qu'on appelle un repliement de spectre.
Figure 4 : Echantillonnage provoquant le repliement de spectre
Théorie de la quantification et de l’échantillonnage ESIEE - Olivier Français
Acquisition de données V.5
S’il y a repliement de spectre, il n’est plus possible de retrouver le spectre du signald’origine. Dans ce cas, l’opération d’échantillonnage modifie les caractéristiques du signald’entrée.
Ainsi, si l’on ne veut pas perdre d’informations par rapport au signal que l’onéchantillonne, on devra toujours respecter la condition : (Fe≥2Fmax). Condition plus connuepar le théorème de Shannon.
II.4 Théorème de ShannonOn ne peut échantillonner un signal sans pertes d’informations que si :
maxF2Fe >
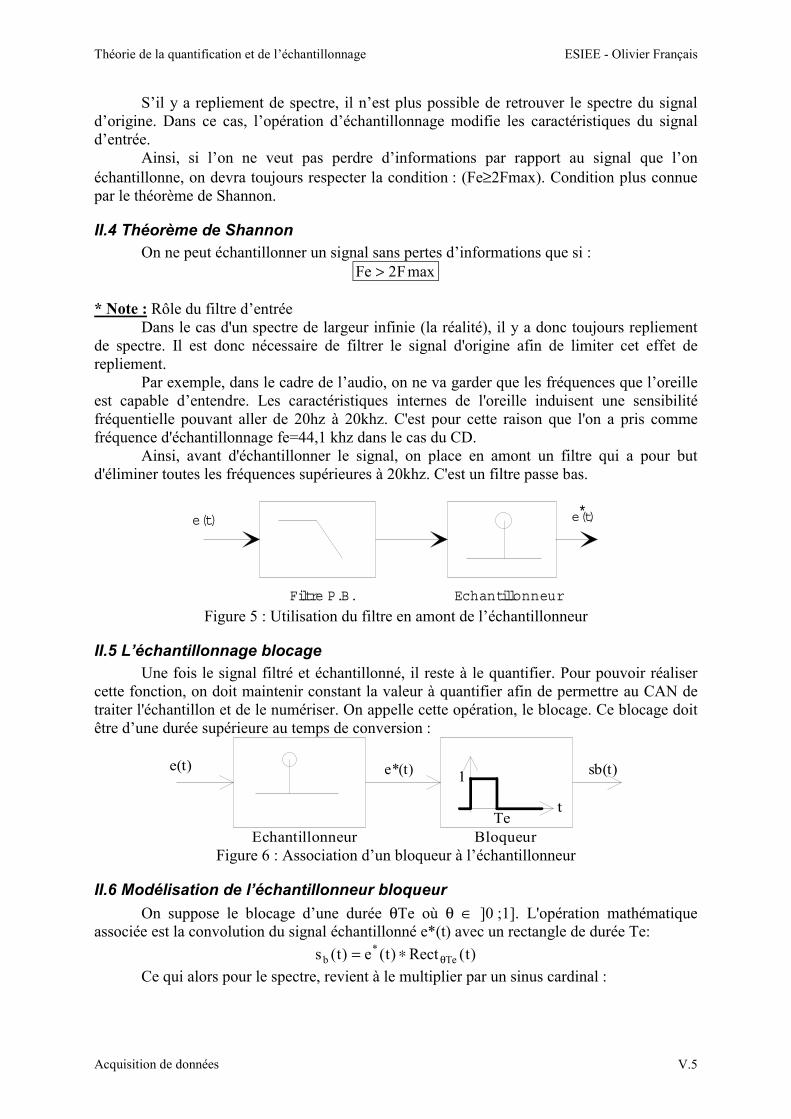
* Note : Rôle du filtre d’entréeDans le cas d'un spectre de largeur infinie (la réalité), il y a donc toujours repliement
de spectre. Il est donc nécessaire de filtrer le signal d'origine afin de limiter cet effet derepliement.
Par exemple, dans le cadre de l’audio, on ne va garder que les fréquences que l’oreilleest capable d’entendre. Les caractéristiques internes de l'oreille induisent une sensibilitéfréquentielle pouvant aller de 20hz à 20khz. C'est pour cette raison que l'on a pris commefréquence d'échantillonnage fe=44,1 khz dans le cas du CD.
Ainsi, avant d'échantillonner le signal, on place en amont un filtre qui a pour butd'éliminer toutes les fréquences supérieures à 20khz. C'est un filtre passe bas.
Filtre P.B. Echantillonneur
e(t) e(t)*
Figure 5 : Utilisation du filtre en amont de l’échantillonneur
II.5 L’échantillonnage blocageUne fois le signal filtré et échantillonné, il reste à le quantifier. Pour pouvoir réaliser
cette fonction, on doit maintenir constant la valeur à quantifier afin de permettre au CAN detraiter l'échantillon et de le numériser. On appelle cette opération, le blocage. Ce blocage doitêtre d’une durée supérieure au temps de conversion :
e(t) e*(t) sb(t)1
Tet
BloqueurEchantillonneurFigure 6 : Association d’un bloqueur à l’échantillonneur
II.6 Modélisation de l’échantillonneur bloqueur
On suppose le blocage d’une durée θTe où θ ∈ ]0 ;1]. L'opération mathématiqueassociée est la convolution du signal échantillonné e*(t) avec un rectangle de durée Te:
)t(Rect)t(e)t(s Te*
b θ∗=Ce qui alors pour le spectre, revient à le multiplier par un sinus cardinal :
Théorie de la quantification et de l’échantillonnage ESIEE - Olivier Français
Acquisition de données V.6
)f
f(csin).f(E)f(S
e
*b θλ=
On peut tracer alors les caractéristiques du signal échantillonné-bloqué en fonction dusignal d’entrée :
Figure 7 : Propriétés d’un signal échantillonné bloqué (θ<1)
On note que dans le cas d’un blocage de faible durée (θ<1), le sinus-cardinal atténueeu les premières recopies de spectre. Un filtre passe-bas avec une fréquence de coupure à Fe/2permettrait de récuperer de manière parfaite le signal d’entrée.
Figure 8 : Propriétés d’un signal échantillonné bloqué (θ=1)
Dans le cas d’un signal bloqué sur toute la période d’échantillonnage (ce quicorrespond en fait au signal restitué en sortie d’un CNA), le sinus-cardinal écrase lesfréquences proches de la fréquence d’échantillonnage et vient donc modifier les propriétés duspectre du signal d’entrée qui ne peut plus être restitué de manière parfaite à l’aide d’unsimple filtre. Par contre, il présente l’avantage d’éliminer les recopies de spectre et doncd’alléger le contenu spectral du signal.
II.7 Nécessité du filtre d’anti-repliement
II.7.1 Caractéristiques idéalesAvant de réaliser l'échantillonnage du signal, nous avons vu la nécessité de filtrer ce
dernier afin d'éviter ce que l'on appelle le repliement de spectre, plus connu sous la forme duthéorème de Shannon.
Idéalisé, il doit avoir un gain de 1 sur une bande de fréquence Fe, centrée en zéro. Sonrôle va être de limiter le contenu spectral du signal à la partie utile. Il va participer aussi àlimiter l’influence du bruit éventuellement présent sur le signal à numériser.

Théorie de la quantification et de l’échantillonnage ESIEE - Olivier Français
Acquisition de données V.7
Figure 9 : Gabarit idéal du filtre anti-repliement
II.7.2 Filtre réel De manière idéal, un filtre passe bas aura un gain constant dans la bande passante, et
présentera une coupure infinie au-delà de sa fréquence Fc de coupure.
De manière réelle, on est amené à réaliser la synthèse d’un filtre en définissant safréquence de coupure à -3db ainsi qu’une atténuation minimum au-delà d’une certainefréquence.
On fait en général appel, dans le cadre d’un filtre anti-repliement, à un filtre du typeButterworth :
)fc
f1(
1)f(H
n2
+
=
Ce type de filtre présente l’avantage de répondre au critère de maximum de platitudedans la bande passante et de présenter un retard de groupe constant jusqu’à fc/2.
Le choix de l’ordre du filtre s’effectue de manière à limiter la puissance du signal dûaux recopies de spectre. On limite donc le recouvrement de spectre en terme de puissanceramenée par rapport à la puissance du signal :
%XP
P
signal
ntrecouvreme ≤
Si l’on suppose un signal à spectre constant, et que l’on admet une puissance ramenéed’au plus 1%, nous pouvons établir en fonction de n, la valeur de la fréquence de coupure dufiltre :
n 1 2 4 6Fc Fe/127 Fe/6 Fe/3 Fe/2
Rq : Problème lié au retard de groupeTout filtre introduit un déphasage qui peut introduire une distorsion dans le cadre d’un
signal multifréquence (cas de l’audio) :
))t(cos(V)tcos(VVs)tcos(VVeωϕ−ω=ϕ−ω=⇒ω=
Ainsi un signal en sortie d’un filtre ressort avec un retard Tr : ωϕ=Tr .
Si ce retard n’est pas constant pour toute les fréquences (déphasage linéaire avec lafréquence), on obtient alors une distorsion. Deux signaux synchrones, en entrée du filtre,ressortent désynchronisés :
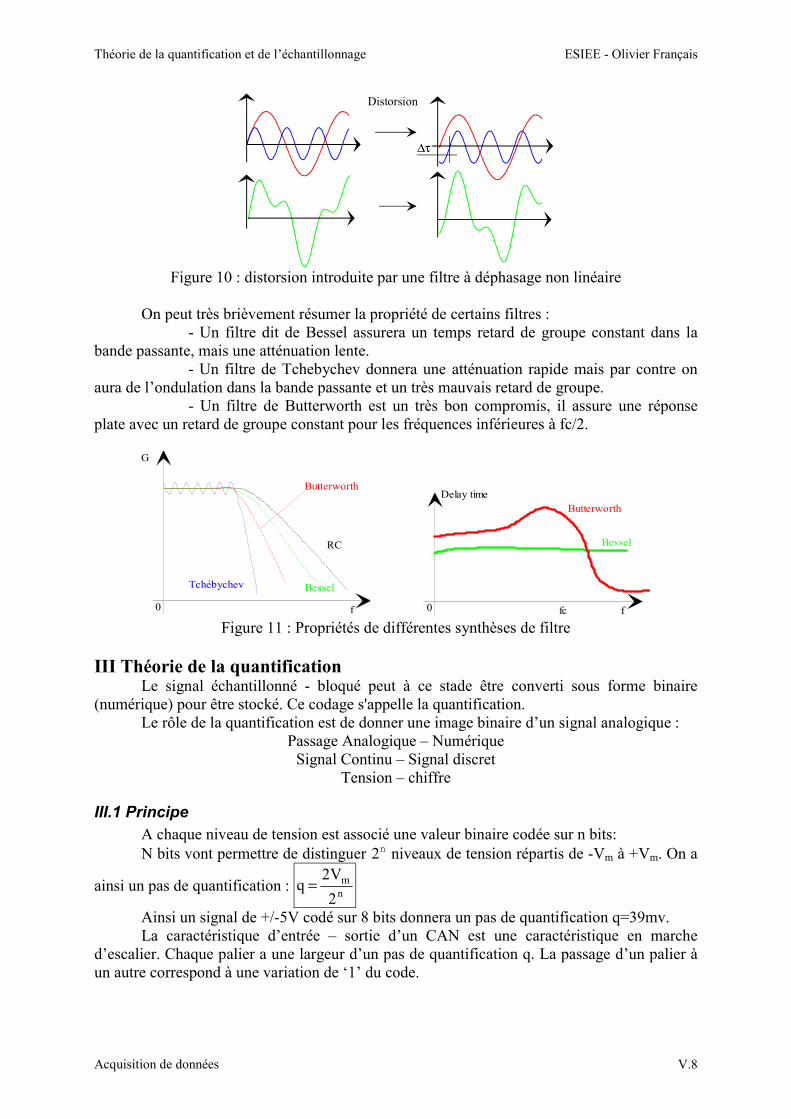
Théorie de la quantification et de l’échantillonnage ESIEE - Olivier Français
Acquisition de données V.8
Distorsion
∆τ
Figure 10 : distorsion introduite par une filtre à déphasage non linéaire
On peut très brièvement résumer la propriété de certains filtres :- Un filtre dit de Bessel assurera un temps retard de groupe constant dans la
bande passante, mais une atténuation lente.- Un filtre de Tchebychev donnera une atténuation rapide mais par contre on
aura de l’ondulation dans la bande passante et un très mauvais retard de groupe.- Un filtre de Butterworth est un très bon compromis, il assure une réponse
plate avec un retard de groupe constant pour les fréquences inférieures à fc/2.
Tchébychev Bessel
Butterworth
RC
0 f
G
Bessel
Butterworth
0 f
Delay time
fc
Figure 11 : Propriétés de différentes synthèses de filtre
III Théorie de la quantificationLe signal échantillonné - bloqué peut à ce stade être converti sous forme binaire
(numérique) pour être stocké. Ce codage s'appelle la quantification.Le rôle de la quantification est de donner une image binaire d’un signal analogique :
Passage Analogique – NumériqueSignal Continu – Signal discret
Tension – chiffre
III.1 PrincipeA chaque niveau de tension est associé une valeur binaire codée sur n bits:N bits vont permettre de distinguer 2n niveaux de tension répartis de -Vm à +Vm. On a
ainsi un pas de quantification : nm
2
V2q =
Ainsi un signal de +/-5V codé sur 8 bits donnera un pas de quantification q=39mv.La caractéristique d’entrée – sortie d’un CAN est une caractéristique en marche
d’escalier. Chaque palier a une largeur d’un pas de quantification q. La passage d’un palier àun autre correspond à une variation de ‘1’ du code.
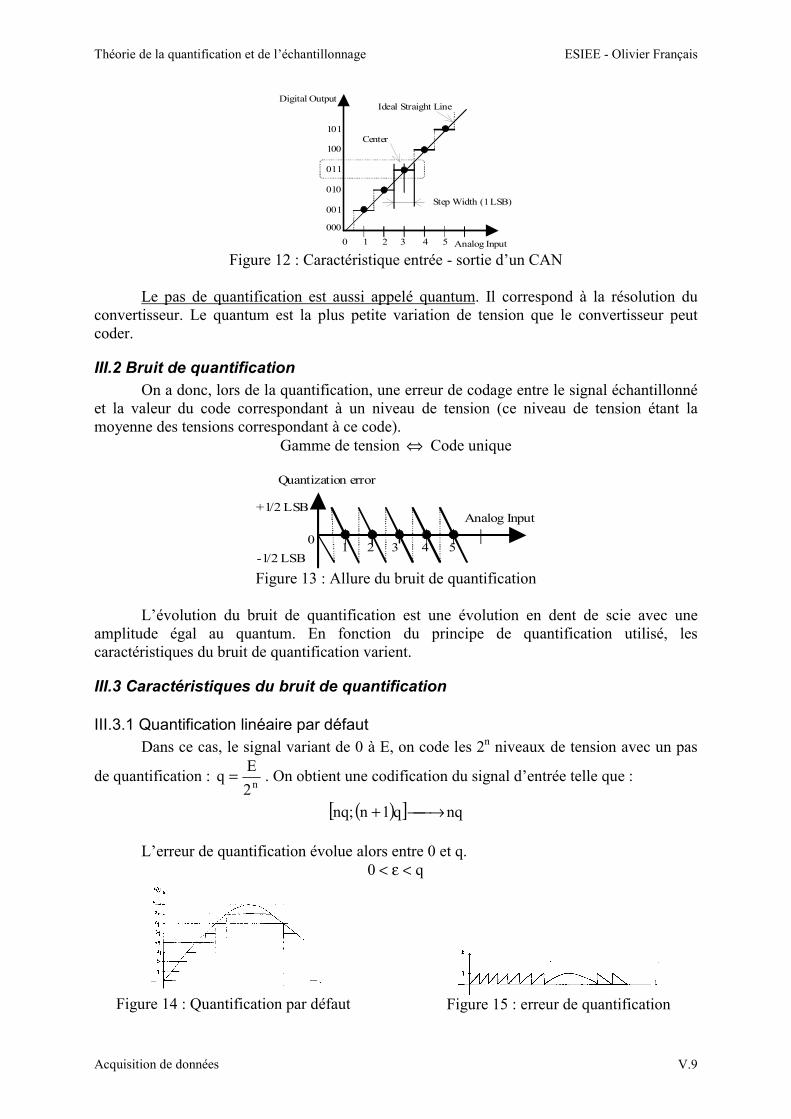
Théorie de la quantification et de l’échantillonnage ESIEE - Olivier Français
Acquisition de données V.9
000
001
010
011
100
101
0 1 2 3 4 5
Ideal Straight Line
Step Width (1 LSB)
Center
Analog Input
Digital Output
Figure 12 : Caractéristique entrée - sortie d’un CAN
Le pas de quantification est aussi appelé quantum. Il correspond à la résolution duconvertisseur. Le quantum est la plus petite variation de tension que le convertisseur peutcoder.
III.2 Bruit de quantificationOn a donc, lors de la quantification, une erreur de codage entre le signal échantillonné
et la valeur du code correspondant à un niveau de tension (ce niveau de tension étant lamoyenne des tensions correspondant à ce code).
Gamme de tension ⇔ Code unique
01 2 3 4 5
Quantization error
+1/2 LSB
-1/2 LSB
Analog Input
Figure 13 : Allure du bruit de quantification
L’évolution du bruit de quantification est une évolution en dent de scie avec uneamplitude égal au quantum. En fonction du principe de quantification utilisé, lescaractéristiques du bruit de quantification varient.
III.3 Caractéristiques du bruit de quantification
III.3.1 Quantification linéaire par défaut Dans ce cas, le signal variant de 0 à E, on code les 2n niveaux de tension avec un pas
de quantification : n2
Eq = . On obtient une codification du signal d’entrée telle que :
( )[ ] nqq1n;nq →+
L’erreur de quantification évolue alors entre 0 et q.q0 <ε<
Figure 14 : Quantification par défaut Figure 15 : erreur de quantification

Si l’on suppose que le signal est de répartition continue, avec un écart type supérieur àquelques quantum, on peut admettre que l’évolution du bruit de quantification ε est en dent descie. On peut ainsi calculer sa puissance en terme de moyenne quadratique (elle correspond àla puissance du signal dans une résistance de 1Ω) :
3
q)t(P
22 =ε=ε
III.3.2 Quantification linéaire centréeDans la pratique, on préfère effectuer une quantification centrée. Dans ce cas, le bruit
de quantification évolue entre +/- q/2 :2/q2/q +<ε<−
Figure 16 : quantification centrée Figure 17 : erreur de quantification
Le signal d’entrée est donc codé tel que :
( ) ( ) nq2
q1n2;
2
q1n2 →
+−
La puissance du bruit de quantification que l’on obtient est :
12
q)t(P
22 =ε=ε
On notera l’avantage du codage centré par rapport à un codage par défaut. Le bruit dequantification est plus faible.
III.3.3 Quantification non linéaireDans le cadre de l’audio (cadre de la téléphonie) plutôt que d’utiliser une loi de
quantification linéaire, on fait appel à une quantification logarithmique.
Figure 18 : Cas d’une quantification logarithmique
L’oreille est un capteur sensible de manière logarithmique au son (une amplitudesonore dix fois plus importante induit une sensation de volume sonore double). On adaptel’amplitude du bruit de quantification à l’amplitude du signal d’entrée de manière à avoir un
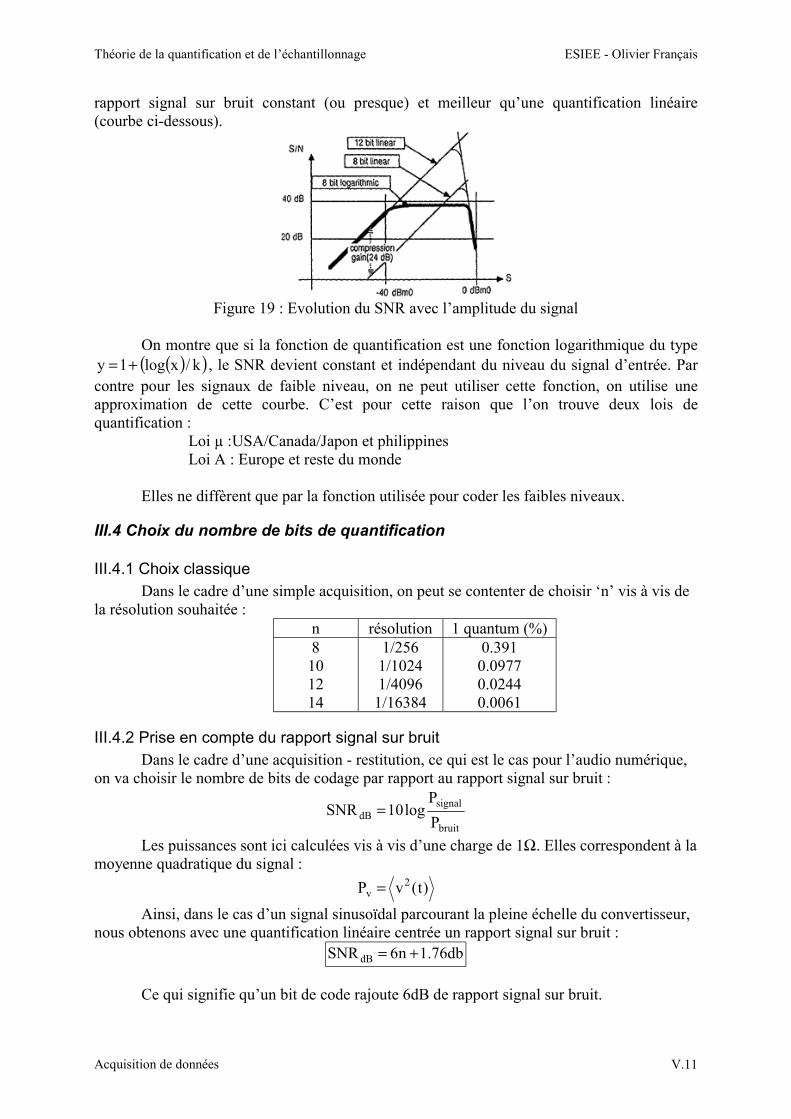
Théorie de la quantification et de l’échantillonnage ESIEE - Olivier Français
Acquisition de données V.11
rapport signal sur bruit constant (ou presque) et meilleur qu’une quantification linéaire(courbe ci-dessous).
Figure 19 : Evolution du SNR avec l’amplitude du signal
On montre que si la fonction de quantification est une fonction logarithmique du type( )( )k/xlog1y += , le SNR devient constant et indépendant du niveau du signal d’entrée. Par
contre pour les signaux de faible niveau, on ne peut utiliser cette fonction, on utilise uneapproximation de cette courbe. C’est pour cette raison que l’on trouve deux lois dequantification :
Loi µ :USA/Canada/Japon et philippinesLoi A : Europe et reste du monde
Elles ne diffèrent que par la fonction utilisée pour coder les faibles niveaux.
III.4 Choix du nombre de bits de quantification
III.4.1 Choix classiqueDans le cadre d’une simple acquisition, on peut se contenter de choisir ‘n’ vis à vis de
la résolution souhaitée :n résolution 1 quantum (%)8101214
1/2561/10241/40961/16384
0.3910.09770.02440.0061
III.4.2 Prise en compte du rapport signal sur bruitDans le cadre d’une acquisition - restitution, ce qui est le cas pour l’audio numérique,
on va choisir le nombre de bits de codage par rapport au rapport signal sur bruit :
bruit
signaldB P
Plog10SNR =
Les puissances sont ici calculées vis à vis d’une charge de 1Ω. Elles correspondent à lamoyenne quadratique du signal :
)t(vP 2v =
Ainsi, dans le cas d’un signal sinusoïdal parcourant la pleine échelle du convertisseur,nous obtenons avec une quantification linéaire centrée un rapport signal sur bruit :
db76.1n6SNR dB +=
Ce qui signifie qu’un bit de code rajoute 6dB de rapport signal sur bruit.
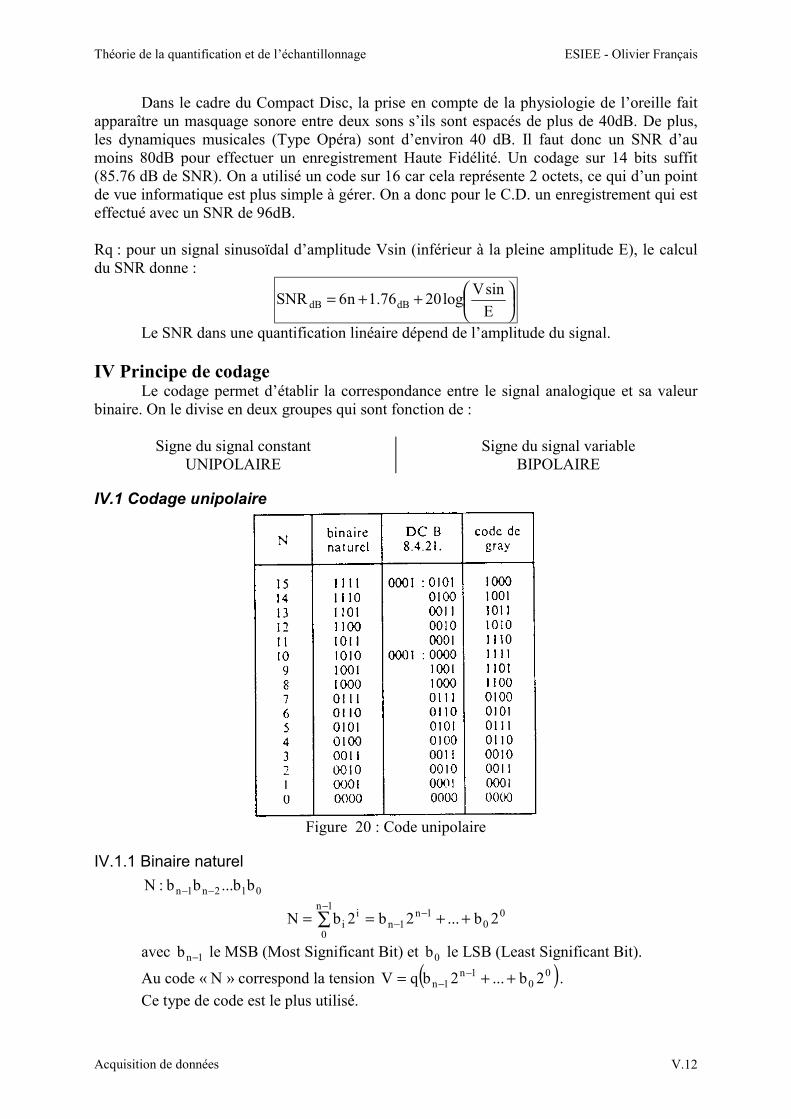
Théorie de la quantification et de l’échantillonnage ESIEE - Olivier Français
Acquisition de données V.12
Dans le cadre du Compact Disc, la prise en compte de la physiologie de l’oreille faitapparaître un masquage sonore entre deux sons s’ils sont espacés de plus de 40dB. De plus,les dynamiques musicales (Type Opéra) sont d’environ 40 dB. Il faut donc un SNR d’aumoins 80dB pour effectuer un enregistrement Haute Fidélité. Un codage sur 14 bits suffit(85.76 dB de SNR). On a utilisé un code sur 16 car cela représente 2 octets, ce qui d’un pointde vue informatique est plus simple à gérer. On a donc pour le C.D. un enregistrement qui esteffectué avec un SNR de 96dB.
Rq : pour un signal sinusoïdal d’amplitude Vsin (inférieur à la pleine amplitude E), le calculdu SNR donne :
++=
E
sinVlog2076.1n6SNR dBdB
Le SNR dans une quantification linéaire dépend de l’amplitude du signal.
IV Principe de codageLe codage permet d’établir la correspondance entre le signal analogique et sa valeur
binaire. On le divise en deux groupes qui sont fonction de :
Signe du signal constantUNIPOLAIRE
Signe du signal variableBIPOLAIRE
IV.1 Codage unipolaire
Figure 20 : Code unipolaire
IV.1.1 Binaire naturel
012n1n bb...bb:N −−
00
1n1n
1n
0
ii 2b...2b2bN ++== −
−
−∑
avec 1nb − le MSB (Most Significant Bit) et 0b le LSB (Least Significant Bit).
Au code « N » correspond la tension ( )00
1n1n 2b...2bqV ++= −
− .
Ce type de code est le plus utilisé.
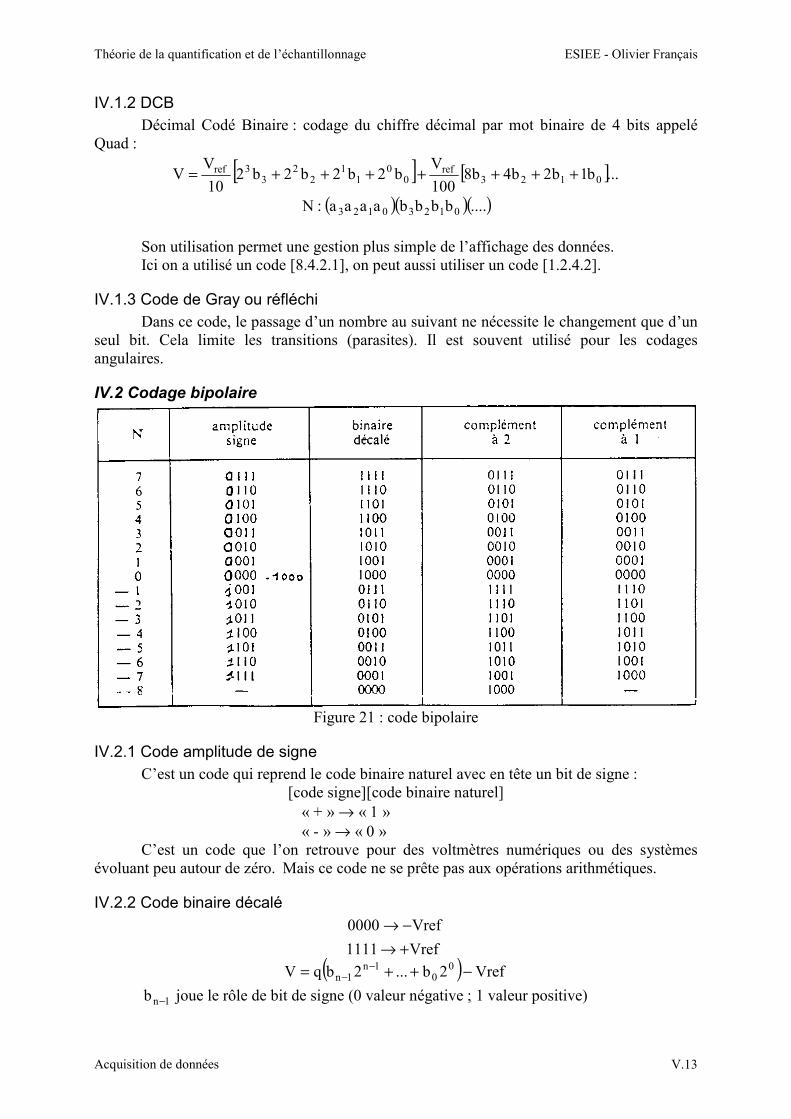
Théorie de la quantification et de l’échantillonnage ESIEE - Olivier Français
Acquisition de données V.13
IV.1.2 DCBDécimal Codé Binaire : codage du chiffre décimal par mot binaire de 4 bits appelé
Quad :
[ ] [ ]...b1b2b4b8100
Vb2b2b2b2
10
VV 0123
ref0
01
12
23
3ref +++++++=
( )( )( )....bbbbaaaa:N 01230123
Son utilisation permet une gestion plus simple de l’affichage des données.Ici on a utilisé un code [8.4.2.1], on peut aussi utiliser un code [1.2.4.2].
IV.1.3 Code de Gray ou réfléchiDans ce code, le passage d’un nombre au suivant ne nécessite le changement que d’un
seul bit. Cela limite les transitions (parasites). Il est souvent utilisé pour les codagesangulaires.
IV.2 Codage bipolaire
Figure 21 : code bipolaire
IV.2.1 Code amplitude de signeC’est un code qui reprend le code binaire naturel avec en tête un bit de signe :
[code signe][code binaire naturel]« + » → « 1 »« - » → « 0 »
C’est un code que l’on retrouve pour des voltmètres numériques ou des systèmesévoluant peu autour de zéro. Mais ce code ne se prête pas aux opérations arithmétiques.
IV.2.2 Code binaire décalé
Vref1111
Vref0000
+→−→
( ) Vref2b...2bqV 00
1n1n −++= −
−
1nb − joue le rôle de bit de signe (0 valeur négative ; 1 valeur positive)

Théorie de la quantification et de l’échantillonnage ESIEE - Olivier Français
Acquisition de données V.14
C’est un code que l’on retrouve dans les interfaces Numérique - Analogique (CNA).
IV.2.3 Code complément à deuxC’est le code binaire décalé avec le bit de signe inversé :
( ) Vref2b...2bqV 00
1n1n −++= −
−
Ainsi pour un chiffre positif on utilise le codage binaire naturel. Pour un chiffrenégatif on prend le complément du nombre positif auquel on rajoute le chiffre (****0001).
Ce code se prête bien aux opérations arithmétiques (informatique).
IV.2.4 Code complément à unChiffre positif : binaire naturelChiffre négatif : complément bit à bit du binaire naturelUtilisé dans les compteurs (circuits logiques).

Théorie de la quantification et de l’échantillonnage ESIEE - Olivier Français
Acquisition de données V.15
Annexe A
Rappel Traitement du signalOutils mathématiques
I La transformée de Fourier(Joseph Fourier, mathématicien Français, 1768-1830)
I.1 Définition de la transformée de FourierA tout signal fonction du temps e(t), on peut associer son image E(f) définie dans l'espace desfréquences. E est appelée transformée de Fourier de e, elle est définie par:
E f F e t e t e dtj f t( ) ( ( )) ( ) .= = −
−∞
+∞
∫ 2π
I.2 Propriétés de la transformée de FourierIl y a complète dualité entre l'espace temps et l'espace fréquence qui est représenté par
la transformée de Fourier. Cela implique l'existence de la transformée de Fourier inverse :
e t F E f E f e dfj f t( ) ( ( )) ( ) .= =−
−∞
+∞
∫1 2π
La transformée de Fourier introduit la notion de spectre d'un signal qui est lacaractéristique fréquentielle d'un signal. Un signal peut être ainsi défini dans deux espaces,soit temporel soit fréquentiel.
Remarque: On peut étendre la transformée de Fourier en parlant de transformée de Laplace.On pose p comme variable complexe (p=j2πf), ainsi :
L e(t E p e(t e dtpt( )) ( ) ).= = −∫Propriétés: Linéarité, commutativité, associativité, bijectivité…
de plus e(0-)- )p(E.p)dt
)t(de(L = ; )(e)p(pElim;)0(e)p(pElim
0pp+∞==
→
+
+∞→
II.3 Le produit de convolution
On définit le produit de convolution entre deux signaux en décalant de τ l’un des deuxsignaux et en intégrant leur produit sur le temps :
s t e t h t e h t d( ) ( ) ( ) ( ) ( )= ∗ = −−∞
+∞
∫ λ λ λ
Propriétés: On notera que la transformée de s(t) traversant un filtre de réponseimpulsionnelle h(t) vaut :
S f E f H f( ) ( ). ( )=
Inversement, si S f E f H f( ) ( ) ( )= ∗ alors s t e t h t( ) ( ). ( )=C’est une propriété très importante. Une multiplication temporelle devient un produit
de convolution fréquentiel. De même un produit de convolution temporel devient unemultiplication fréquentielle.
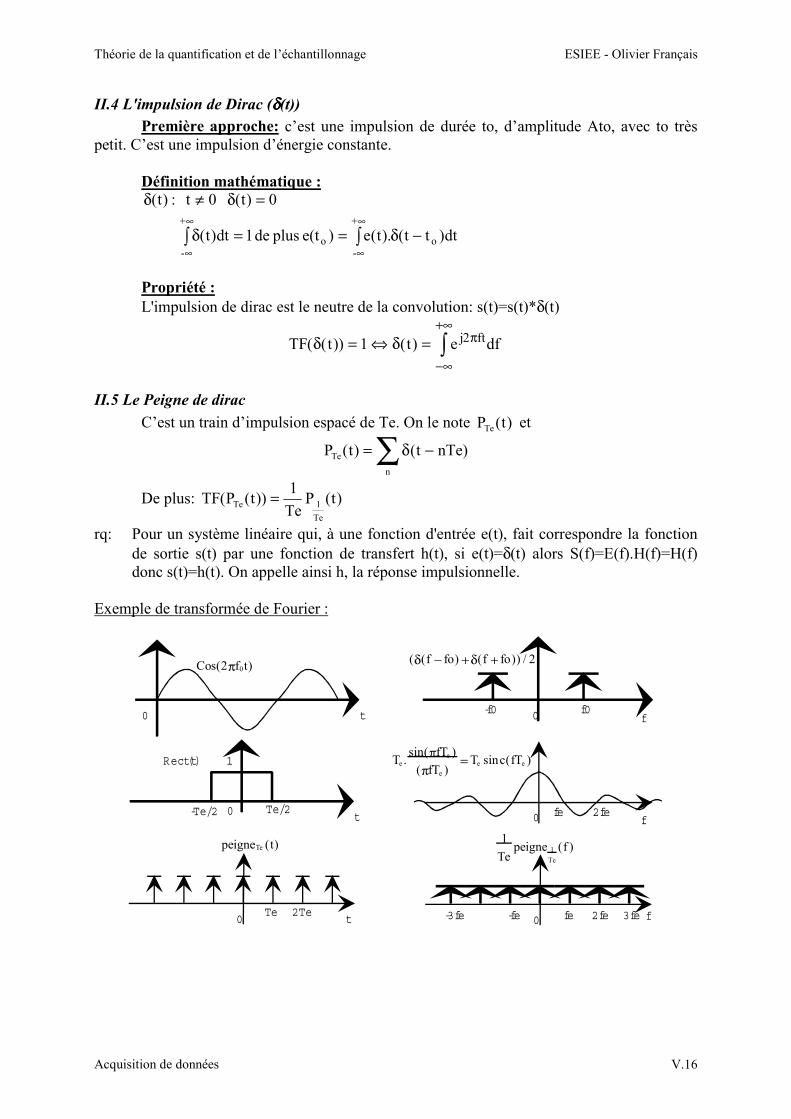
Théorie de la quantification et de l’échantillonnage ESIEE - Olivier Français
Acquisition de données V.16
II.4 L'impulsion de Dirac (δδδδ(t))Première approche: c’est une impulsion de durée to, d’amplitude Ato, avec to très
petit. C’est une impulsion d’énergie constante.
Définition mathématique :
∫∫∞
∞
∞
∞−δ==δ
=δ≠δ+
-oo
+
-
dt)tt().t(e)e(t plus de 1dt)t(
0)t( 0 t:)t(
Propriété :L'impulsion de dirac est le neutre de la convolution: s(t)=s(t)*δ(t)
TF t t e dfj ft( ( )) ( )δ δ π= ⇔ =−∞
+∞
∫1 2
II.5 Le Peigne de dirac
C’est un train d’impulsion espacé de Te. On le note P tTe( ) et
P t t nTeTe
n
( ) ( )= −∑δ
De plus: TF P tTe
P tTe
Te
( ( )) ( )= 11
rq: Pour un système linéaire qui, à une fonction d'entrée e(t), fait correspondre la fonctionde sortie s(t) par une fonction de transfert h(t), si e(t)=δ(t) alors S(f)=E(f).H(f)=H(f)donc s(t)=h(t). On appelle ainsi h, la réponse impulsionnelle.
Exemple de transformée de Fourier :
Cos f t( )2 0π
0 t 0 ff0-f0
( ( ) ( )) /δ δf fo f fo− + + 2
0 f0 t
Rect(t)
0 t
peigne tTe ( )
Te 2Te0 f
11
Tepeigne f
Te
( )
fe 2fe 3fe -3fe -fe
Te/2
1
-Te/2
TfT
fTT c fTe
e
ee e.
sin( )
( )sin ( )
ππ
=
fe 2fe
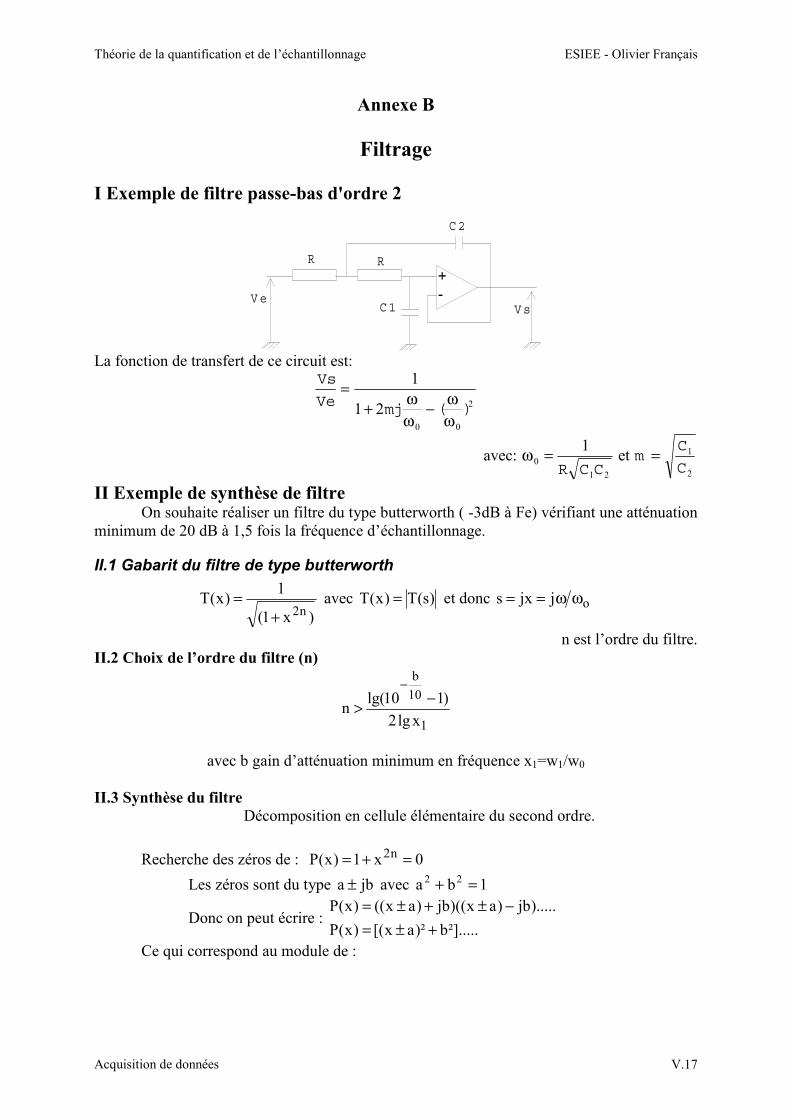
Théorie de la quantification et de l’échantillonnage ESIEE - Olivier Français
Acquisition de données V.17
Annexe B
Filtrage
I Exemple de filtre passe-bas d'ordre 2
R R
C 2
C 1V e
V s
La fonction de transfert de ce circuit est:Vs
Ve mj=
+ −
1
1 20 0
2ωω
ωω( )
avec: ω0
1 2
1=R C C
et mC
C= 1
2
II Exemple de synthèse de filtre On souhaite réaliser un filtre du type butterworth ( -3dB à Fe) vérifiant une atténuation
minimum de 20 dB à 1,5 fois la fréquence d’échantillonnage.
II.1 Gabarit du filtre de type butterworth
)x1(
1)x(T
n2+= avec )s(T)x(T = et donc ojjxs ωω==
n est l’ordre du filtre.II.2 Choix de l’ordre du filtre (n)
1
10
b
xlg2
)110lg(n
−>−
avec b gain d’atténuation minimum en fréquence x1=w1/w0
II.3 Synthèse du filtreDécomposition en cellule élémentaire du second ordre.
Recherche des zéros de : 0x1)x(P n2 =+=Les zéros sont du type jba ± avec 1ba 22 =+
Donc on peut écrire : ²].....b)²ax[()x(P
).....jb)ax)((jb)ax(()x(P
+±=−±+±=
Ce qui correspond au module de :
Théorie de la quantification et de l’échantillonnage ESIEE - Olivier Français
Acquisition de données V.18
²]...sbs2²b²a[)s(P
zzT]....;jasb][jasb[)s(P avec
)s(P)]....ax(jb)][ax(jb[)x(P
+++==−+++=
=−+++=
Ainsi on retrouve la fonction de transfert décomposée en ordre 2.
Dans le cas n=6 :
Trois cellules d’ordre 2 :
[ ]2;1;0:k12k
12sinm
π+π=
Cellule M R C1 C2
1 0,2588 3.07 kΩ 10 nF 0,67 nF2 0,7071 1,125 kΩ 10 nF 5 nF3 0,9659 824 Ω 10 nF 9,32 nF
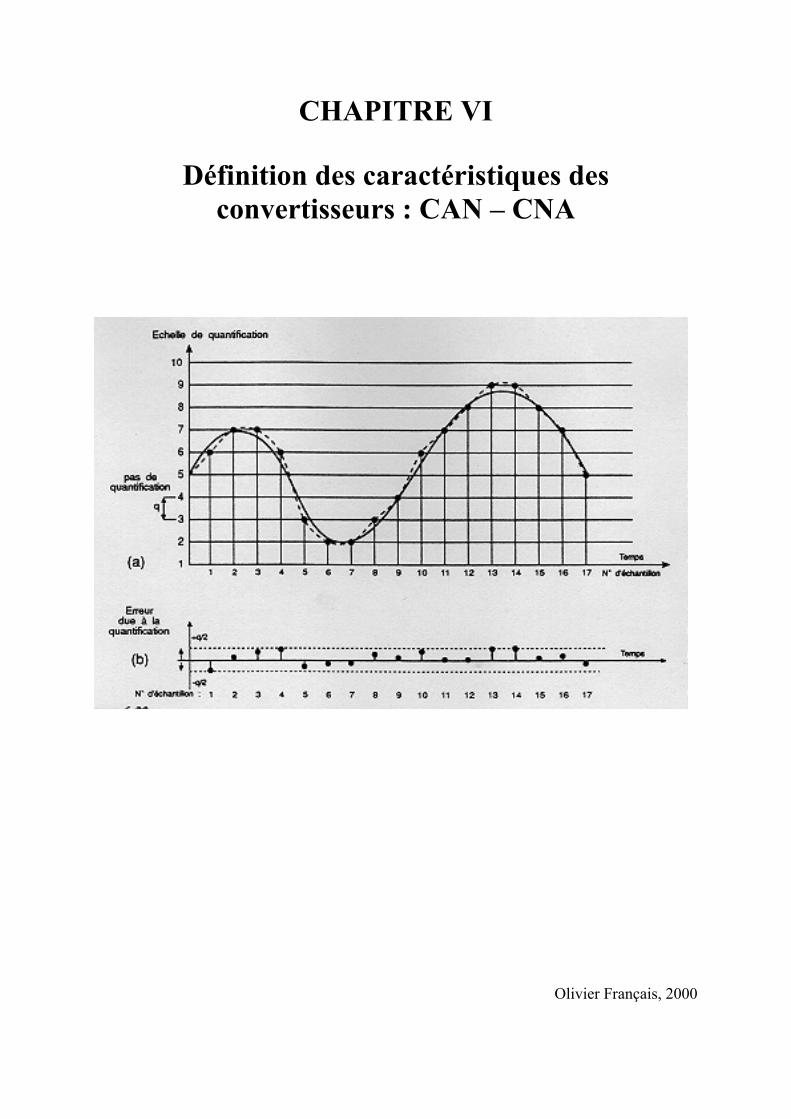
CHAPITRE VI
Définition des caractéristiques desconvertisseurs : CAN – CNA
Olivier Français, 2000
Caractéristiques des convertisseurs ESIEE - Olivier Français
Acquisition de données VI.2
SOMMAIRE
I CARACTÉRISTIQUE DE TRANSFERT IDÉAL .......................................................................................... 3
I.1 DÉFINITION ..................................................................................................................................................... 3I.2 RÉSOLUTION ................................................................................................................................................... 3I.3 ERREUR DE QUANTIFICATION.......................................................................................................................... 4
II ERREURS DES CONVERTISSEURS............................................................................................................ 4
II.1 ERREUR D’OFFSET ......................................................................................................................................... 4II.2 ERREUR DE GAIN............................................................................................................................................ 4II.3 ERREUR DE LINÉARITÉ DIFFÉRENTIELLE (DNL)............................................................................................. 5II.4 ERREUR DE LINÉARITÉ INTÉGRALE (INL) ...................................................................................................... 5II.5 CARACTÉRISTIQUE TOTALE SANS COMPENSATION......................................................................................... 5II.6 ERREUR D’HYSTÉRÉSIS .................................................................................................................................. 6II.7 ERREUR DE MONOTONICITÉ ........................................................................................................................... 6

Caractéristiques des convertisseurs ESIEE - Olivier Français
Acquisition de données VI.3
Définition des caractéristiques desconvertisseurs : CAN – CNA
I Caractéristique de transfert idéal
I.1 DéfinitionC’est la caractéristique qui sert de référence pour l’analyse des erreurs (les écarts sont
mesurés par rapport à la droite idéale).
000
001
010
011
100
101
0 1 2 3 4 5
Ideal Straight Line
Step Width (1 LSB)
Center
Analog Input
Digital Output
000 001 010 011 100 101
0
1
2
3
4
5
Ideal Straight LineAnalog Output
Digital Input Code
Step Height (1LSB)
Figure 1 : Caractéristique de transfert idéal CAN - CNA
Pour le CAN, la caractéristique de transfert idéal est une courbe en escalier qui liel’entrée analogique au code numérique qui lui est affectée. On peut l’établir à l’aide de lafonction Enom :
+++=
nrefnom2
bn...
4
2b
2
1bUE
Ainsi, le code obtenu (b1b2…bn) vérifie :
nref
nominnref
nom2
U
2
1EV
2
U
2
1E +<<−
Pour le CNA, nous obtenons une caractéristique discrète où chaque point est lié aucode par la relation :
+++=
nrefout2
bn...
4
2b
2
1bUV
I.2 RésolutionPour le CAN, c’est la plus petite variation de tension qui engendre une modification
du code. Elle correspond au quantum, on l’exprime très souvent en pourcentage (%) :
1002
1Résolution
n=
Pour le CNA, c’est l’écart minimum entre deux codes. Elle représente le pourcentaged’évolution de la sortie.
n résolution 1 quantum (%)8101214
1/2561/10241/40961/16384
0.3910.09770.02440.0061
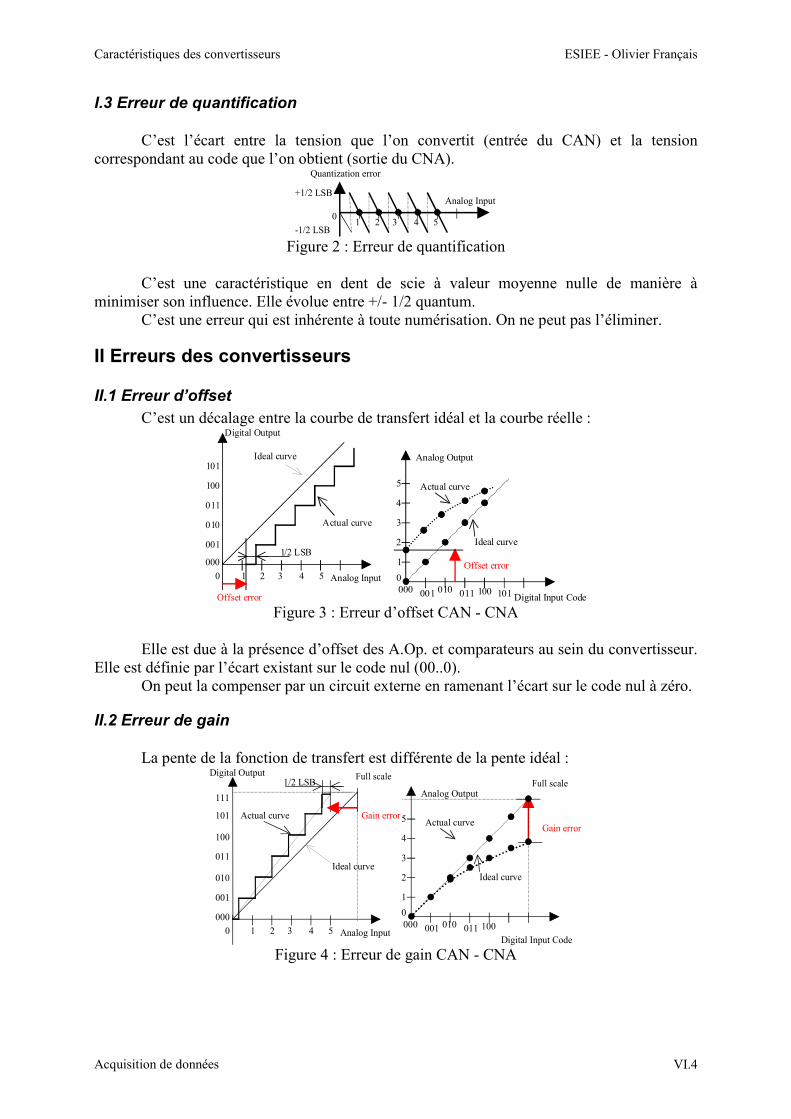
Caractéristiques des convertisseurs ESIEE - Olivier Français
Acquisition de données VI.4
I.3 Erreur de quantification
C’est l’écart entre la tension que l’on convertit (entrée du CAN) et la tensioncorrespondant au code que l’on obtient (sortie du CNA).
01 2 3 4 5
Quantization error
+1/2 LSB
-1/2 LSB
Analog Input
Figure 2 : Erreur de quantification
C’est une caractéristique en dent de scie à valeur moyenne nulle de manière àminimiser son influence. Elle évolue entre +/- 1/2 quantum.
C’est une erreur qui est inhérente à toute numérisation. On ne peut pas l’éliminer.
II Erreurs des convertisseurs
II.1 Erreur d’offsetC’est un décalage entre la courbe de transfert idéal et la courbe réelle :
000
001
010
011
100
101
0 1 2 3 4 5
Ideal curve
Analog Input
Digital Output
Actual curve
1/2 LSB
Offset error000 001 010 011 100 101
0
1
2
3
4
5
Analog Output
Digital Input Code
Ideal curve
Actual curve
Offset error
Figure 3 : Erreur d’offset CAN - CNA
Elle est due à la présence d’offset des A.Op. et comparateurs au sein du convertisseur.Elle est définie par l’écart existant sur le code nul (00..0).
On peut la compenser par un circuit externe en ramenant l’écart sur le code nul à zéro.
II.2 Erreur de gain
La pente de la fonction de transfert est différente de la pente idéal :
000
001
010
011
100
101
0 1 2 3 4 5
Ideal curve
Analog Input
Digital Output
Gain errorActual curve
1/2 LSBFull scale
111
000 001 010 011 100
0
1
2
3
4
5
Analog Output
Digital Input Code
Ideal curve
Actual curve
Full scale
Gain error
Figure 4 : Erreur de gain CAN - CNA
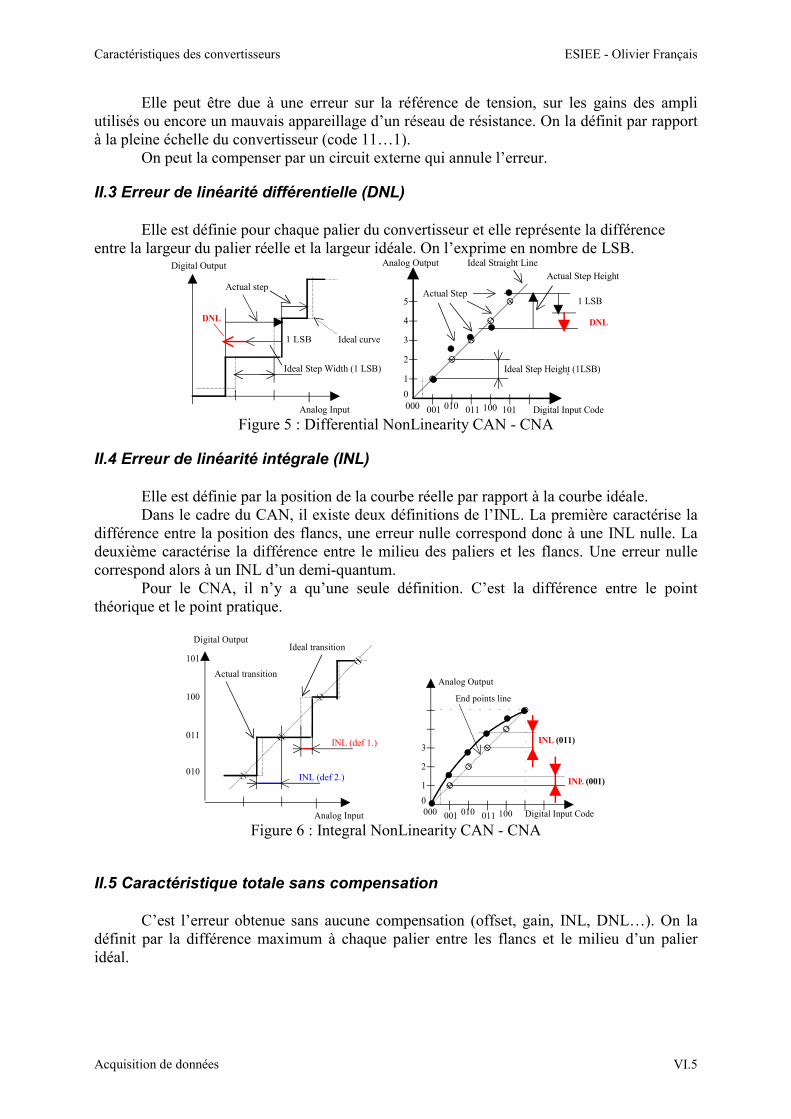
Caractéristiques des convertisseurs ESIEE - Olivier Français
Acquisition de données VI.5
Elle peut être due à une erreur sur la référence de tension, sur les gains des ampliutilisés ou encore un mauvais appareillage d’un réseau de résistance. On la définit par rapportà la pleine échelle du convertisseur (code 11…1).
On peut la compenser par un circuit externe qui annule l’erreur.
II.3 Erreur de linéarité différentielle (DNL)
Elle est définie pour chaque palier du convertisseur et elle représente la différenceentre la largeur du palier réelle et la largeur idéale. On l’exprime en nombre de LSB.
Ideal Step Width (1 LSB)
Analog Input
Digital Output
Ideal curve
Actual step
DNL
1 LSB
000 001 010 011 100 101
0
1
2
3
4
5
Ideal Straight LineAnalog Output
Digital Input Code
Ideal Step Height (1LSB)
DNL
Actual Step1 LSB
Actual Step Height
Figure 5 : Differential NonLinearity CAN - CNA
II.4 Erreur de linéarité intégrale (INL)
Elle est définie par la position de la courbe réelle par rapport à la courbe idéale.Dans le cadre du CAN, il existe deux définitions de l’INL. La première caractérise la
différence entre la position des flancs, une erreur nulle correspond donc à une INL nulle. Ladeuxième caractérise la différence entre le milieu des paliers et les flancs. Une erreur nullecorrespond alors à un INL d’un demi-quantum.
Pour le CNA, il n’y a qu’une seule définition. C’est la différence entre le pointthéorique et le point pratique.
Analog Input
Digital Output
Actual transition
Ideal transition
010
011
100
101
INL (def 1.)
INL (def 2.)
000 001 010 011 100
0
1
2
3
Analog Output
Digital Input Code
INL (011)
INL (001)
End points line
Figure 6 : Integral NonLinearity CAN - CNA
II.5 Caractéristique totale sans compensation
C’est l’erreur obtenue sans aucune compensation (offset, gain, INL, DNL…). On ladéfinit par la différence maximum à chaque palier entre les flancs et le milieu d’un palieridéal.
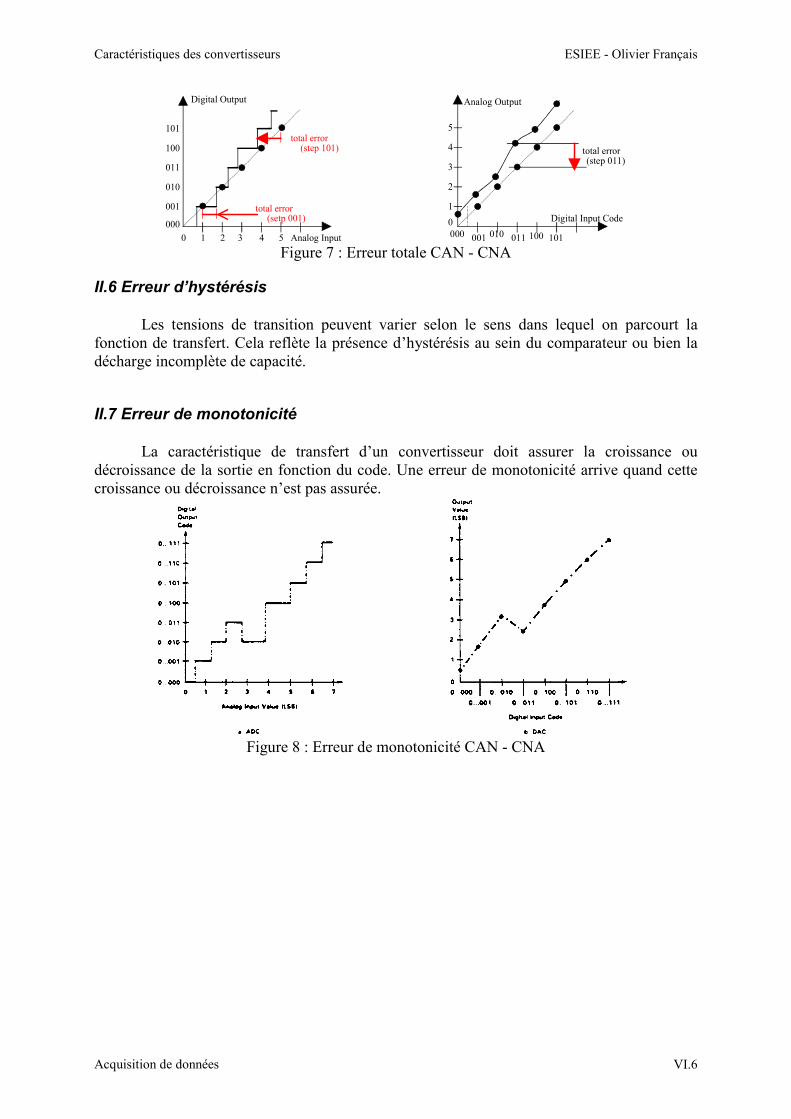
Caractéristiques des convertisseurs ESIEE - Olivier Français
Acquisition de données VI.6
000
001
010
011
100
101
0 1 2 3 4 5 Analog Input
Digital Output
total error(step 101)
total error(setp 001)
000 001 010 011 100 101
0
1
2
3
4
5
Analog Output
Digital Input Code
total error(step 011)
Figure 7 : Erreur totale CAN - CNA
II.6 Erreur d’hystérésis
Les tensions de transition peuvent varier selon le sens dans lequel on parcourt lafonction de transfert. Cela reflète la présence d’hystérésis au sein du comparateur ou bien ladécharge incomplète de capacité.
II.7 Erreur de monotonicité
La caractéristique de transfert d’un convertisseur doit assurer la croissance oudécroissance de la sortie en fonction du code. Une erreur de monotonicité arrive quand cettecroissance ou décroissance n’est pas assurée.
Figure 8 : Erreur de monotonicité CAN - CNA
CHAPITRE VII
Les Convertisseurs Analogiques Numériques
Olivier Français, 2000
Convertisseur Analogique Numérique ESIEE - Olivier Français
Acquisition de données VII.2
SOMMAIRE
LES CONVERTISSEURS À INTÉGRATION .................................................................................................. 3
I LE CONVERTISSEUR SIMPLE RAMPE ...................................................................................................... 3
I.1 PRINCIPE ......................................................................................................................................................... 3I.2 PHASES DE FONCTIONNEMENT ........................................................................................................................ 3I.3 CARACTÉRISTIQUES ........................................................................................................................................ 4
II LE CONVERTISSEUR À RAMPE NUMÉRIQUE....................................................................................... 4
II.1 PRINCIPE........................................................................................................................................................ 4
III LE CONVERTISSEUR DOUBLE RAMPE (OU PAR INTÉGRATION) ................................................. 4
III.1 PRINCIPE....................................................................................................................................................... 4III.2 PHASES DE FONCTIONNEMENT...................................................................................................................... 5
IV LE CONVERTISSEUR PAR PESÉES (APPROXIMATIONS) SUCCESSIVES ..................................... 5
C’EST UNE VIEILLE APPROCHE QUI EST EN PHASE D’ÊTRE REMPLACÉE PAR LES CONVERTISSEUR PIPELINE.......... 5IV.1 PRINCIPE ...................................................................................................................................................... 5IV.2 MISE EN ŒUVRE ........................................................................................................................................... 6
V LE CONVERTISSEUR FLASH (OU PAR COMPARAISON DIRECTE) ................................................. 7
V.1 PRINCIPE........................................................................................................................................................ 7
VI LE CONVERTISSEUR SEMI-FLASH ......................................................................................................... 8
VI.1 PRINCIPE ...................................................................................................................................................... 8
VII BILAN COMPARATIF RAPIDE DES CAN............................................................................................... 8
VIII CONVERTISSEUR PIPELINE .................................................................................................................. 8
VIII.1 PRINCIPE.................................................................................................................................................... 8VIII.2 CAS DU PIPELINE N ÉTAGES 1 BITS ............................................................................................................ 9
IX CONVERTISSEUR ALGORITHMIQUE..................................................................................................... 9
X CONVERTISSEUR À SURÉCHANTILLONNAGE................................................................................... 10
X.1 PRINCIPE...................................................................................................................................................... 10X.2 INFLUENCE SUR LE BRUIT DE QUANTIFICATION ........................................................................................... 10X.3 LE MODULATEUR DELTA.............................................................................................................................. 11X.4 STRUCTURE DELTA SIGMA .......................................................................................................................... 12
XI BILAN DES CONVERTISSEURS (1997) ................................................................................................... 13
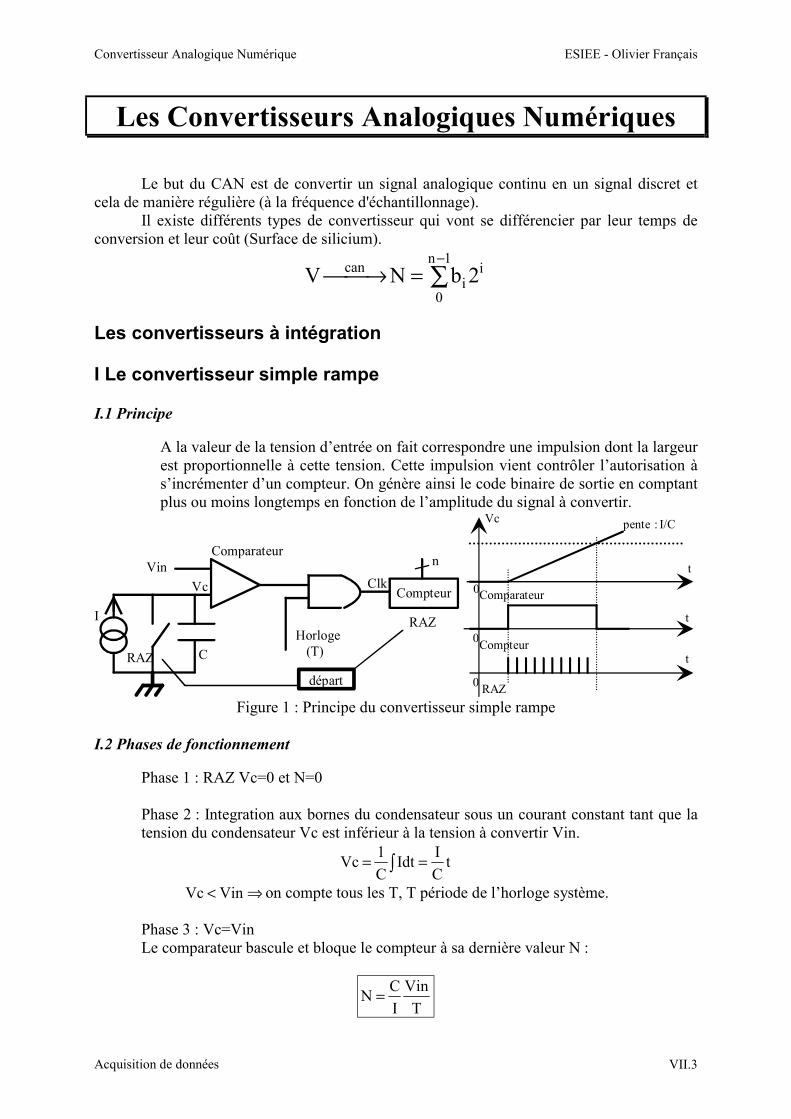
Convertisseur Analogique Numérique ESIEE - Olivier Français
Acquisition de données VII.3
Les Convertisseurs Analogiques Numériques
Le but du CAN est de convertir un signal analogique continu en un signal discret etcela de manière régulière (à la fréquence d'échantillonnage).
Il existe différents types de convertisseur qui vont se différencier par leur temps deconversion et leur coût (Surface de silicium).
∑−
=→1n
0
ii
can 2bNV
Les convertisseurs à intégration
I Le convertisseur simple rampe
I.1 Principe
A la valeur de la tension d’entrée on fait correspondre une impulsion dont la largeurest proportionnelle à cette tension. Cette impulsion vient contrôler l’autorisation às’incrémenter d’un compteur. On génère ainsi le code binaire de sortie en comptantplus ou moins longtemps en fonction de l’amplitude du signal à convertir.
VinComparateur
I
RAZ
Vc
C
Horloge (T)
ClkCompteur
n
RAZ
départ
Comparateur
Vc
Compteur
t
t
t
0
0
0
pente : I/C
RAZ
Figure 1 : Principe du convertisseur simple rampe
I.2 Phases de fonctionnement
Phase 1 : RAZ Vc=0 et N=0
Phase 2 : Integration aux bornes du condensateur sous un courant constant tant que latension du condensateur Vc est inférieur à la tension à convertir Vin.
tC
IIdt
C
1Vc == ∫
⇒< VinVc on compte tous les T, T période de l’horloge système.
Phase 3 : Vc=VinLe comparateur bascule et bloque le compteur à sa dernière valeur N :
T
Vin
I
CN =
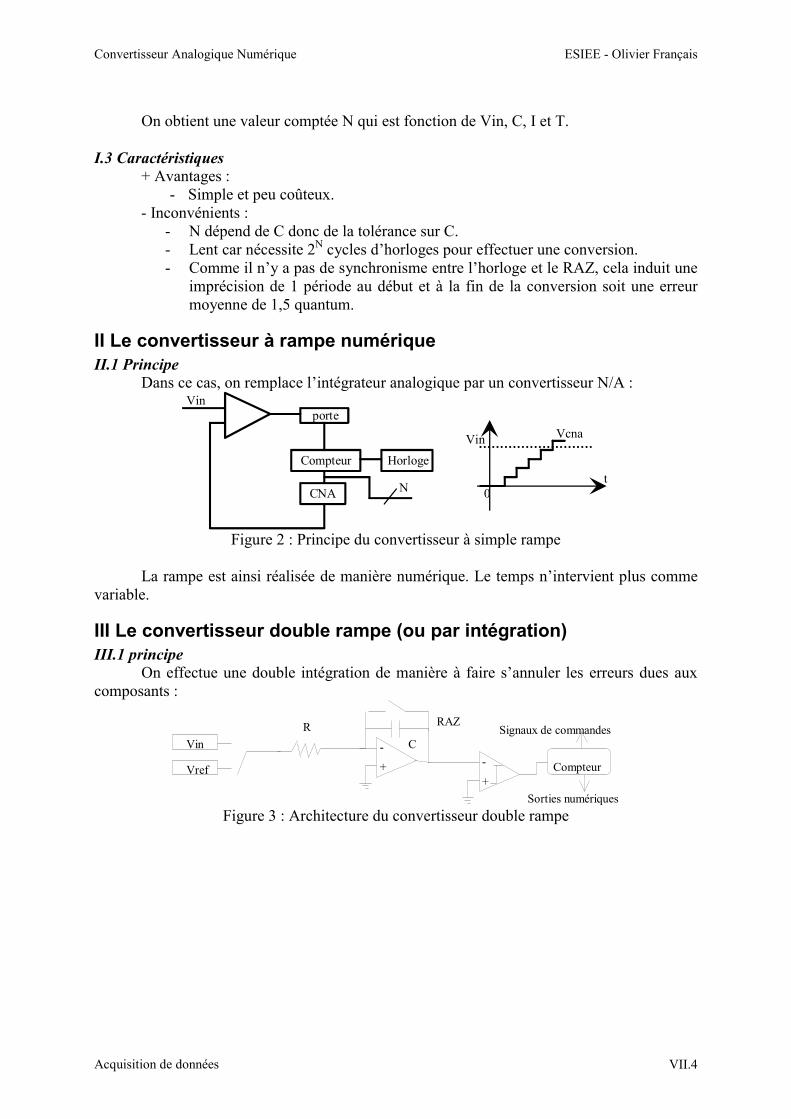
Convertisseur Analogique Numérique ESIEE - Olivier Français
Acquisition de données VII.4
On obtient une valeur comptée N qui est fonction de Vin, C, I et T.
I.3 Caractéristiques+ Avantages :
- Simple et peu coûteux.- Inconvénients :
- N dépend de C donc de la tolérance sur C.- Lent car nécessite 2N cycles d’horloges pour effectuer une conversion.- Comme il n’y a pas de synchronisme entre l’horloge et le RAZ, cela induit une
imprécision de 1 période au début et à la fin de la conversion soit une erreurmoyenne de 1,5 quantum.
II Le convertisseur à rampe numériqueII.1 Principe
Dans ce cas, on remplace l’intégrateur analogique par un convertisseur N/A :
t0
Vin Vcna
porte
Compteur Horloge
CNA
Vin
N
Figure 2 : Principe du convertisseur à simple rampe
La rampe est ainsi réalisée de manière numérique. Le temps n’intervient plus commevariable.
III Le convertisseur double rampe (ou par intégration)III.1 principe
On effectue une double intégration de manière à faire s’annuler les erreurs dues auxcomposants :
R
C
-
+Compteur
Vin
Vref
-
+
RAZSignaux de commandes
Sorties numériques
Figure 3 : Architecture du convertisseur double rampe
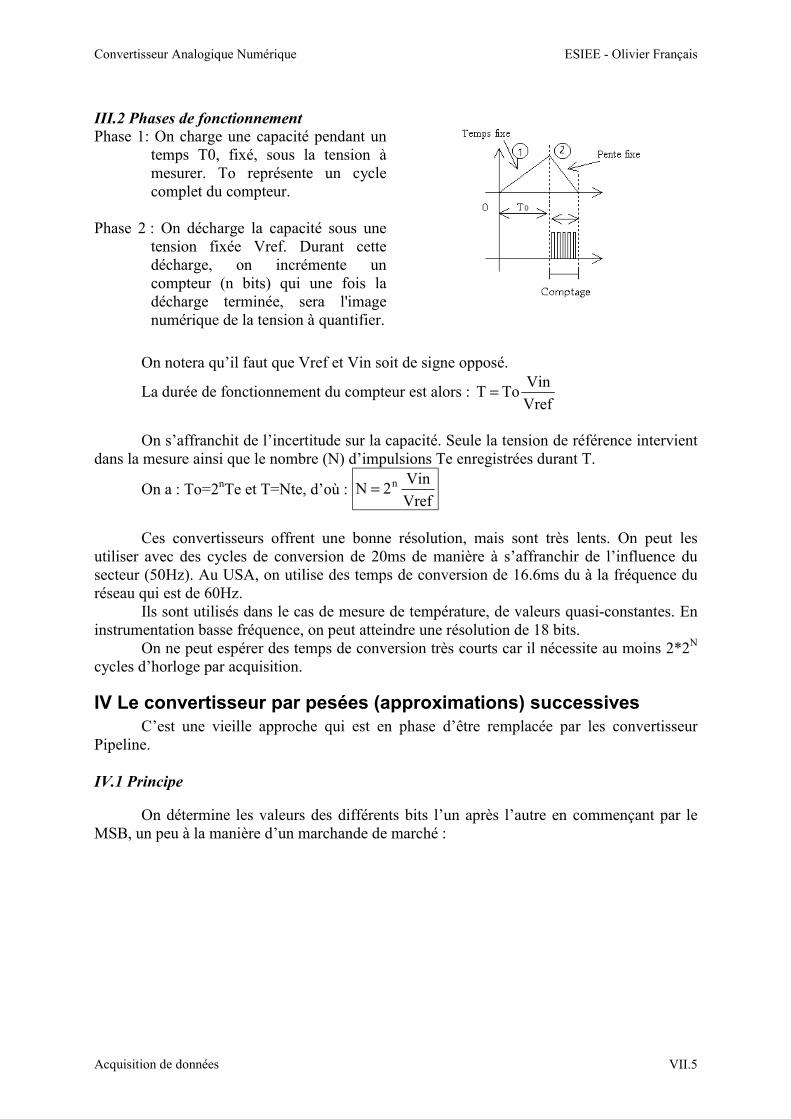
Convertisseur Analogique Numérique ESIEE - Olivier Français
Acquisition de données VII.5
III.2 Phases de fonctionnementPhase 1: On charge une capacité pendant un
temps T0, fixé, sous la tension àmesurer. To représente un cyclecomplet du compteur.
Phase 2 : On décharge la capacité sous unetension fixée Vref. Durant cettedécharge, on incrémente uncompteur (n bits) qui une fois ladécharge terminée, sera l'imagenumérique de la tension à quantifier.
On notera qu’il faut que Vref et Vin soit de signe opposé.
La durée de fonctionnement du compteur est alors : Vref
VinToT =
On s’affranchit de l’incertitude sur la capacité. Seule la tension de référence intervientdans la mesure ainsi que le nombre (N) d’impulsions Te enregistrées durant T.
On a : To=2nTe et T=Nte, d’où : Vref
Vin2N n=
Ces convertisseurs offrent une bonne résolution, mais sont très lents. On peut lesutiliser avec des cycles de conversion de 20ms de manière à s’affranchir de l’influence dusecteur (50Hz). Au USA, on utilise des temps de conversion de 16.6ms du à la fréquence duréseau qui est de 60Hz.
Ils sont utilisés dans le cas de mesure de température, de valeurs quasi-constantes. Eninstrumentation basse fréquence, on peut atteindre une résolution de 18 bits.
On ne peut espérer des temps de conversion très courts car il nécessite au moins 2*2N
cycles d’horloge par acquisition.
IV Le convertisseur par pesées (approximations) successivesC’est une vieille approche qui est en phase d’être remplacée par les convertisseur
Pipeline.
IV.1 Principe
On détermine les valeurs des différents bits l’un après l’autre en commençant par leMSB, un peu à la manière d’un marchande de marché :
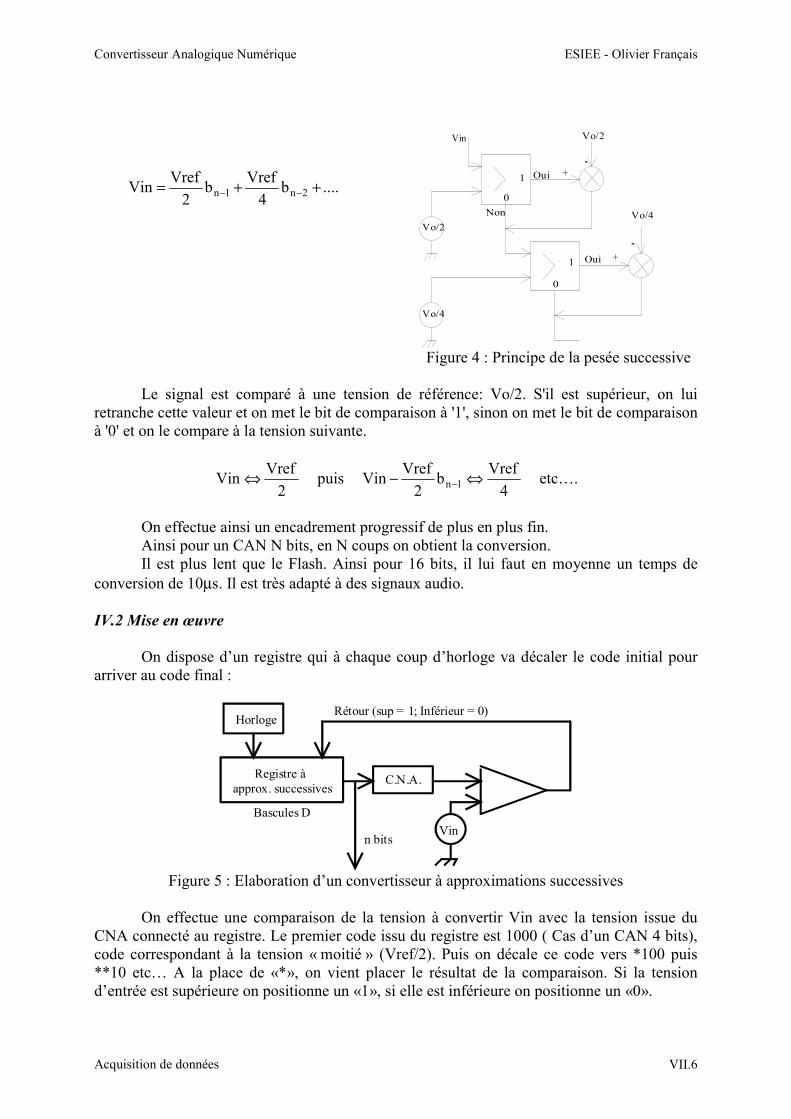
Convertisseur Analogique Numérique ESIEE - Olivier Français
Acquisition de données VII.6
....b4
Vrefb
2
VrefVin 2n1n ++= −−
1
0
1
0
Vo/2
Vo/4
Oui
Oui
Non
Vo/2
Vo/4
+-
+-
Vin
Figure 4 : Principe de la pesée successive
Le signal est comparé à une tension de référence: Vo/2. S'il est supérieur, on luiretranche cette valeur et on met le bit de comparaison à '1', sinon on met le bit de comparaisonà '0' et on le compare à la tension suivante.
2
VrefVin ⇔ puis
4
Vrefb
2
VrefVin 1n ⇔− − etc….
On effectue ainsi un encadrement progressif de plus en plus fin.Ainsi pour un CAN N bits, en N coups on obtient la conversion.Il est plus lent que le Flash. Ainsi pour 16 bits, il lui faut en moyenne un temps de
conversion de 10µs. Il est très adapté à des signaux audio.
IV.2 Mise en œuvre
On dispose d’un registre qui à chaque coup d’horloge va décaler le code initial pourarriver au code final :
Horloge
Registre à approx. successives
C.N.A.
Vin
Rétour (sup = 1; Inférieur = 0)
Bascules D
n bits
Figure 5 : Elaboration d’un convertisseur à approximations successives
On effectue une comparaison de la tension à convertir Vin avec la tension issue duCNA connecté au registre. Le premier code issu du registre est 1000 ( Cas d’un CAN 4 bits),code correspondant à la tension « moitié » (Vref/2). Puis on décale ce code vers *100 puis**10 etc… A la place de «*», on vient placer le résultat de la comparaison. Si la tensiond’entrée est supérieure on positionne un «1», si elle est inférieure on positionne un «0».
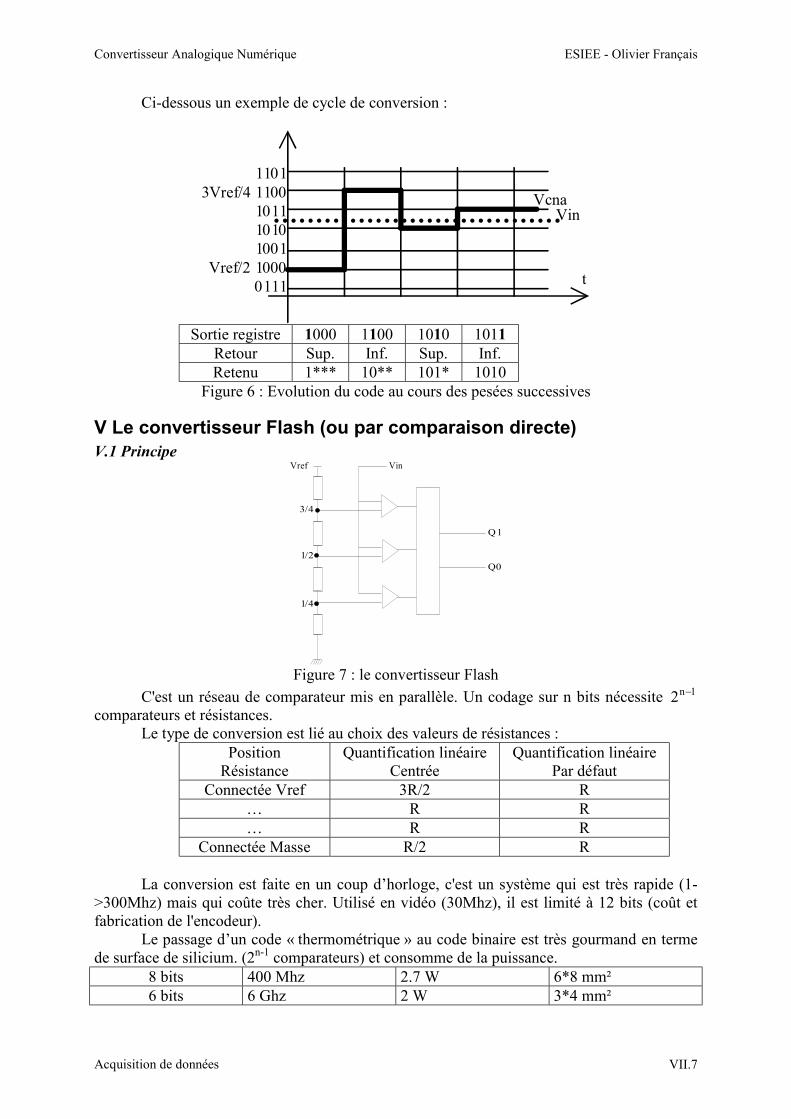
Convertisseur Analogique Numérique ESIEE - Olivier Français
Acquisition de données VII.7
Ci-dessous un exemple de cycle de conversion :
1101110010111010100110000111
VinVcna
Vref/2
3Vref/4
t
Sortie registre 1000 1100 1010 1011Retour Sup. Inf. Sup. Inf.Retenu 1*** 10** 101* 1010
Figure 6 : Evolution du code au cours des pesées successives
V Le convertisseur Flash (ou par comparaison directe)V.1 Principe
Vref
3/4
1/2
1/4
Q1
Q0
Vin
Figure 7 : le convertisseur Flash
C'est un réseau de comparateur mis en parallèle. Un codage sur n bits nécessite 1n2 −
comparateurs et résistances.Le type de conversion est lié au choix des valeurs de résistances :
PositionRésistance
Quantification linéaireCentrée
Quantification linéairePar défaut
Connectée Vref 3R/2 R… R R… R R
Connectée Masse R/2 R
La conversion est faite en un coup d’horloge, c'est un système qui est très rapide (1->300Mhz) mais qui coûte très cher. Utilisé en vidéo (30Mhz), il est limité à 12 bits (coût etfabrication de l'encodeur).
Le passage d’un code « thermométrique » au code binaire est très gourmand en termede surface de silicium. (2n-1 comparateurs) et consomme de la puissance.
8 bits 400 Mhz 2.7 W 6*8 mm²6 bits 6 Ghz 2 W 3*4 mm²
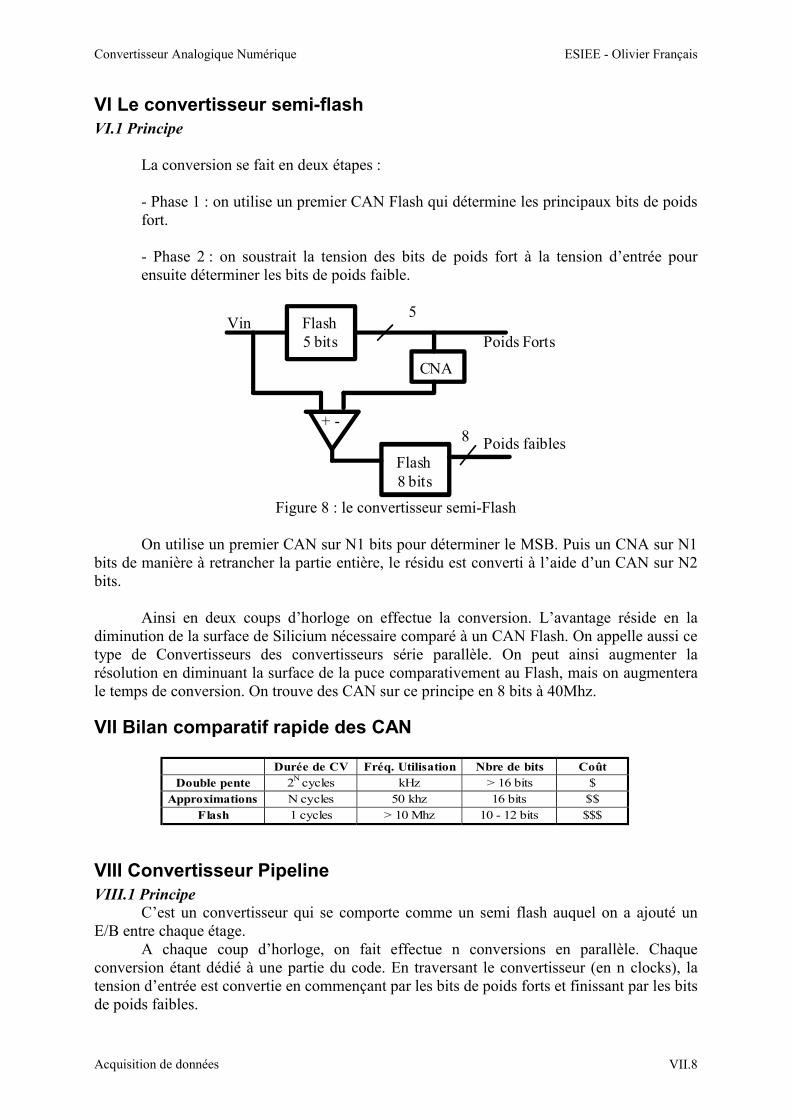
Convertisseur Analogique Numérique ESIEE - Olivier Français
Acquisition de données VII.8
VI Le convertisseur semi-flashVI.1 Principe
La conversion se fait en deux étapes :
- Phase 1 : on utilise un premier CAN Flash qui détermine les principaux bits de poidsfort.
- Phase 2 : on soustrait la tension des bits de poids fort à la tension d’entrée pourensuite déterminer les bits de poids faible.
Flash5 bits
CNA
Flash8 bits
Poids Forts
Poids faibles
5
8+ -
Vin
Figure 8 : le convertisseur semi-Flash
On utilise un premier CAN sur N1 bits pour déterminer le MSB. Puis un CNA sur N1bits de manière à retrancher la partie entière, le résidu est converti à l’aide d’un CAN sur N2bits.
Ainsi en deux coups d’horloge on effectue la conversion. L’avantage réside en ladiminution de la surface de Silicium nécessaire comparé à un CAN Flash. On appelle aussi cetype de Convertisseurs des convertisseurs série parallèle. On peut ainsi augmenter larésolution en diminuant la surface de la puce comparativement au Flash, mais on augmenterale temps de conversion. On trouve des CAN sur ce principe en 8 bits à 40Mhz.
VII Bilan comparatif rapide des CAN
Durée de CV Fréq. Utilisation Nbre de bits CoûtDouble pente 2N cycles kHz > 16 bits $
Approximations N cycles 50 khz 16 bits $$
Flash 1 cycles > 10 Mhz 10 - 12 bits $$$
VIII Convertisseur PipelineVIII.1 Principe
C’est un convertisseur qui se comporte comme un semi flash auquel on a ajouté unE/B entre chaque étage.
A chaque coup d’horloge, on fait effectue n conversions en parallèle. Chaqueconversion étant dédié à une partie du code. En traversant le convertisseur (en n clocks), latension d’entrée est convertie en commençant par les bits de poids forts et finissant par les bitsde poids faibles.
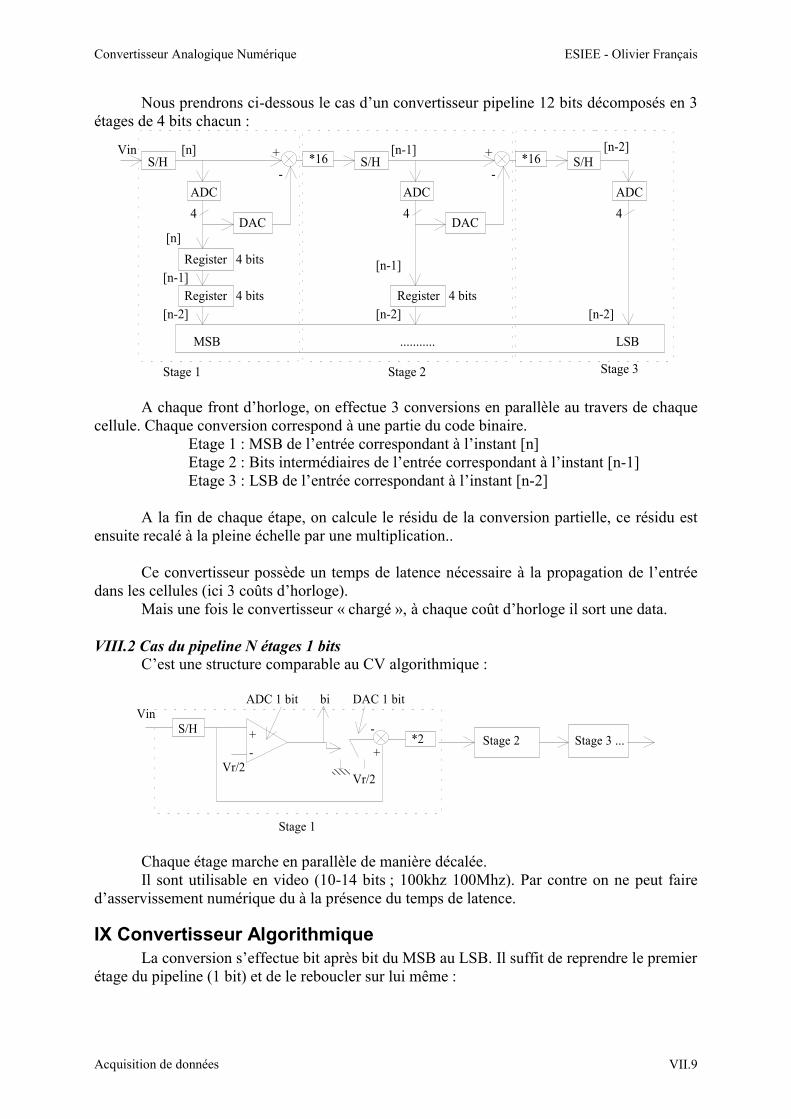
Convertisseur Analogique Numérique ESIEE - Olivier Français
Acquisition de données VII.9
Nous prendrons ci-dessous le cas d’un convertisseur pipeline 12 bits décomposés en 3étages de 4 bits chacun :
S/H
ADC
DAC
Register
Register
*16+
-
4
4 bits
4 bits
[n-2]
[n-1]
[n]
S/H
ADC
DAC
Register
*16+
-
4
4 bits
[n-2]
[n-1]
S/H
ADC
4
[n-2]
MSB LSB...........
Stage 1 Stage 2 Stage 3
[n] [n-1] [n-2]Vin
A chaque front d’horloge, on effectue 3 conversions en parallèle au travers de chaquecellule. Chaque conversion correspond à une partie du code binaire.
Etage 1 : MSB de l’entrée correspondant à l’instant [n]Etage 2 : Bits intermédiaires de l’entrée correspondant à l’instant [n-1]Etage 3 : LSB de l’entrée correspondant à l’instant [n-2]
A la fin de chaque étape, on calcule le résidu de la conversion partielle, ce résidu estensuite recalé à la pleine échelle par une multiplication..
Ce convertisseur possède un temps de latence nécessaire à la propagation de l’entréedans les cellules (ici 3 coûts d’horloge).
Mais une fois le convertisseur « chargé », à chaque coût d’horloge il sort une data.
VIII.2 Cas du pipeline N étages 1 bits C’est une structure comparable au CV algorithmique :
S/H
+
-*2
Vr/2Vr/2
+
-
ADC 1 bit bi
Stage 2 Stage 3 ...
Vin
Stage 1
DAC 1 bit
Chaque étage marche en parallèle de manière décalée.Il sont utilisable en video (10-14 bits ; 100khz 100Mhz). Par contre on ne peut faire
d’asservissement numérique du à la présence du temps de latence.
IX Convertisseur AlgorithmiqueLa conversion s’effectue bit après bit du MSB au LSB. Il suffit de reprendre le premier
étage du pipeline (1 bit) et de le reboucler sur lui même :
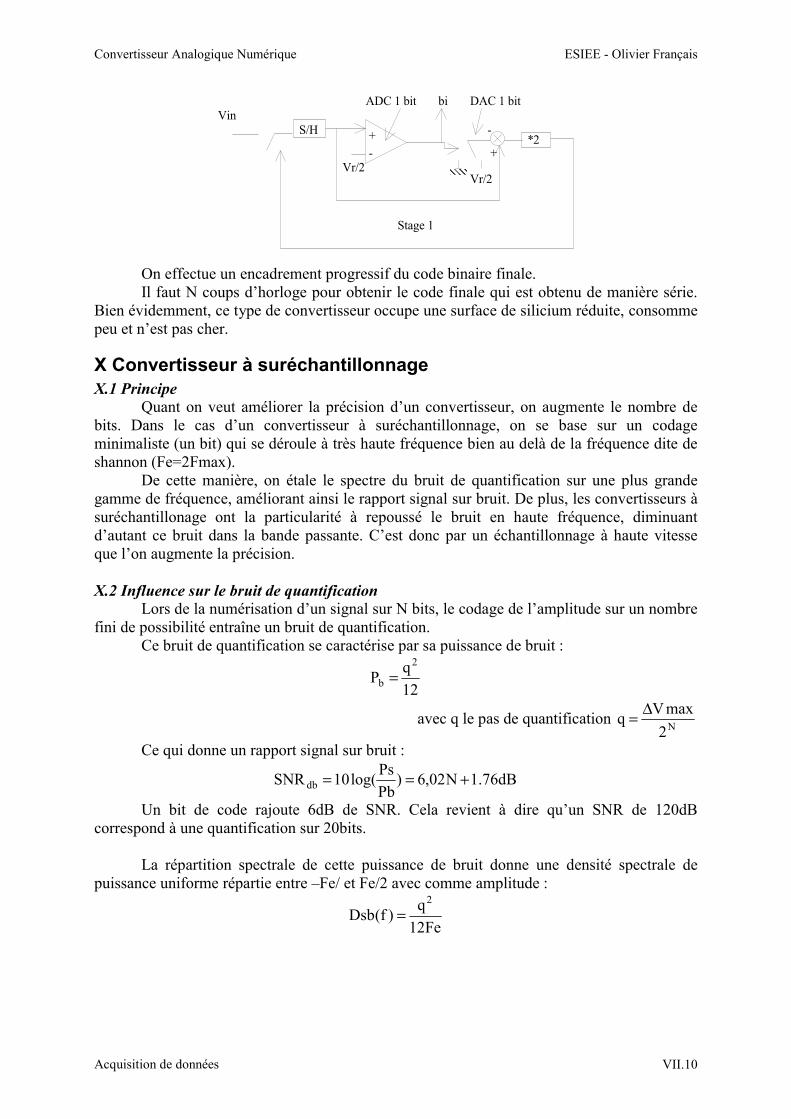
Convertisseur Analogique Numérique ESIEE - Olivier Français
Acquisition de données VII.10
S/H
+
-*2
Vr/2Vr/2
+
-
ADC 1 bit biVin
Stage 1
DAC 1 bit
On effectue un encadrement progressif du code binaire finale.Il faut N coups d’horloge pour obtenir le code finale qui est obtenu de manière série.
Bien évidemment, ce type de convertisseur occupe une surface de silicium réduite, consommepeu et n’est pas cher.
X Convertisseur à suréchantillonnageX.1 Principe
Quant on veut améliorer la précision d’un convertisseur, on augmente le nombre debits. Dans le cas d’un convertisseur à suréchantillonnage, on se base sur un codageminimaliste (un bit) qui se déroule à très haute fréquence bien au delà de la fréquence dite deshannon (Fe=2Fmax).
De cette manière, on étale le spectre du bruit de quantification sur une plus grandegamme de fréquence, améliorant ainsi le rapport signal sur bruit. De plus, les convertisseurs àsuréchantillonage ont la particularité à repoussé le bruit en haute fréquence, diminuantd’autant ce bruit dans la bande passante. C’est donc par un échantillonnage à haute vitesseque l’on augmente la précision.
X.2 Influence sur le bruit de quantificationLors de la numérisation d’un signal sur N bits, le codage de l’amplitude sur un nombre
fini de possibilité entraîne un bruit de quantification.Ce bruit de quantification se caractérise par sa puissance de bruit :
12
qP
2
b =
avec q le pas de quantification N2
maxVq
∆=
Ce qui donne un rapport signal sur bruit :
dB76.1N02,6)Pb
Pslog(10SNR db +==
Un bit de code rajoute 6dB de SNR. Cela revient à dire qu’un SNR de 120dBcorrespond à une quantification sur 20bits.
La répartition spectrale de cette puissance de bruit donne une densité spectrale depuissance uniforme répartie entre –Fe/ et Fe/2 avec comme amplitude :
Fe12
q)f(Dsb
2
=
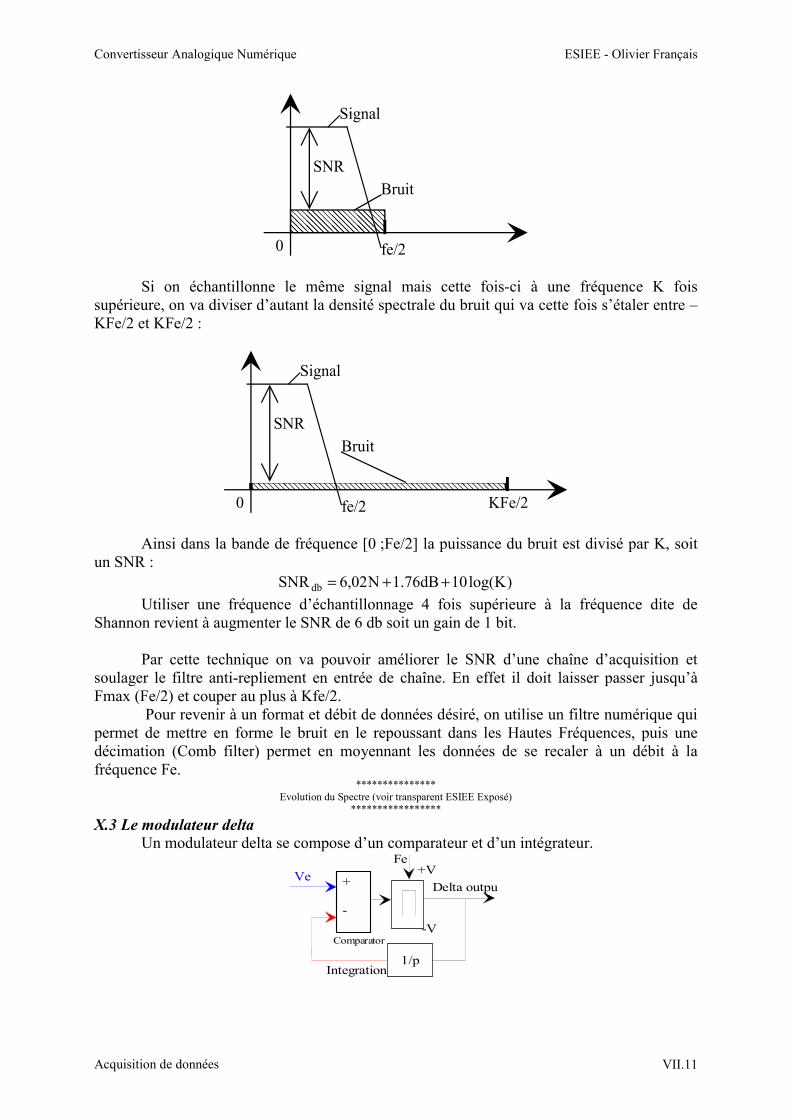
Convertisseur Analogique Numérique ESIEE - Olivier Français
Acquisition de données VII.11
0
Signal
Bruit
SNR
fe/2
Si on échantillonne le même signal mais cette fois-ci à une fréquence K foissupérieure, on va diviser d’autant la densité spectrale du bruit qui va cette fois s’étaler entre –KFe/2 et KFe/2 :
0
Signal
Bruit
SNR
fe/2 KFe/2
Ainsi dans la bande de fréquence [0 ;Fe/2] la puissance du bruit est divisé par K, soitun SNR :
)Klog(10dB76.1N02,6SNR db ++=Utiliser une fréquence d’échantillonnage 4 fois supérieure à la fréquence dite de
Shannon revient à augmenter le SNR de 6 db soit un gain de 1 bit.
Par cette technique on va pouvoir améliorer le SNR d’une chaîne d’acquisition etsoulager le filtre anti-repliement en entrée de chaîne. En effet il doit laisser passer jusqu’àFmax (Fe/2) et couper au plus à Kfe/2.
Pour revenir à un format et débit de données désiré, on utilise un filtre numérique quipermet de mettre en forme le bruit en le repoussant dans les Hautes Fréquences, puis unedécimation (Comb filter) permet en moyennant les données de se recaler à un débit à lafréquence Fe.
***************Evolution du Spectre (voir transparent ESIEE Exposé)
*****************
X.3 Le modulateur deltaUn modulateur delta se compose d’un comparateur et d’un intégrateur.
Ve +
-
1/pIntegration
Fe
Delta outpu
+V
-VComparator
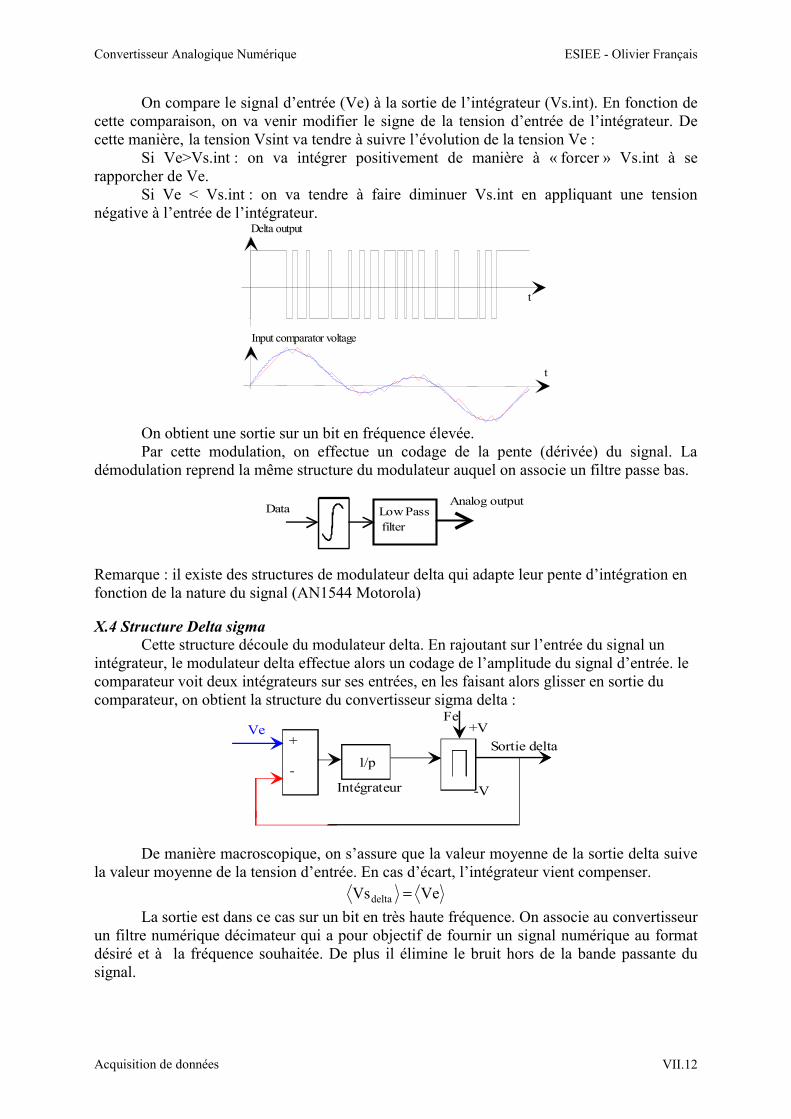
Convertisseur Analogique Numérique ESIEE - Olivier Français
Acquisition de données VII.12
On compare le signal d’entrée (Ve) à la sortie de l’intégrateur (Vs.int). En fonction decette comparaison, on va venir modifier le signe de la tension d’entrée de l’intégrateur. Decette manière, la tension Vsint va tendre à suivre l’évolution de la tension Ve :
Si Ve>Vs.int : on va intégrer positivement de manière à « forcer » Vs.int à serapporcher de Ve.
Si Ve < Vs.int : on va tendre à faire diminuer Vs.int en appliquant une tensionnégative à l’entrée de l’intégrateur.
Delta output
Input comparator voltage
t
t
On obtient une sortie sur un bit en fréquence élevée.Par cette modulation, on effectue un codage de la pente (dérivée) du signal. La
démodulation reprend la même structure du modulateur auquel on associe un filtre passe bas.
Low Pass filter
DataAnalog output
Remarque : il existe des structures de modulateur delta qui adapte leur pente d’intégration enfonction de la nature du signal (AN1544 Motorola)
X.4 Structure Delta sigmaCette structure découle du modulateur delta. En rajoutant sur l’entrée du signal un
intégrateur, le modulateur delta effectue alors un codage de l’amplitude du signal d’entrée. lecomparateur voit deux intégrateurs sur ses entrées, en les faisant alors glisser en sortie ducomparateur, on obtient la structure du convertisseur sigma delta :
Ve+
-1/p
Intégrateur
Fe
Sortie delta
+V
-V
De manière macroscopique, on s’assure que la valeur moyenne de la sortie delta suivela valeur moyenne de la tension d’entrée. En cas d’écart, l’intégrateur vient compenser.
VeVsdelta =La sortie est dans ce cas sur un bit en très haute fréquence. On associe au convertisseur
un filtre numérique décimateur qui a pour objectif de fournir un signal numérique au formatdésiré et à la fréquence souhaitée. De plus il élimine le bruit hors de la bande passante dusignal.
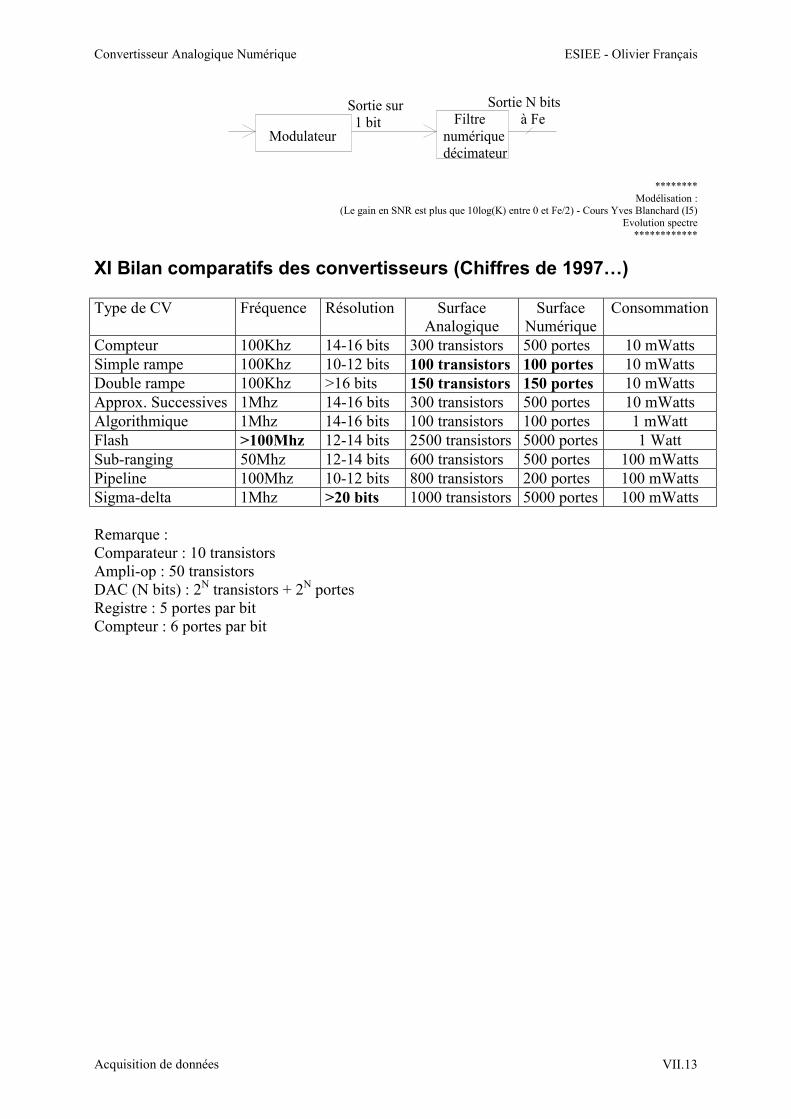
Convertisseur Analogique Numérique ESIEE - Olivier Français
Acquisition de données VII.13
Modulateur Filtrenumériquedécimateur
Sortie sur 1 bit
Sortie N bits à Fe
********Modélisation :
(Le gain en SNR est plus que 10log(K) entre 0 et Fe/2) - Cours Yves Blanchard (I5)Evolution spectre
************
XI Bilan comparatifs des convertisseurs (Chiffres de 1997…)
Type de CV Fréquence Résolution SurfaceAnalogique
SurfaceNumérique
Consommation
Compteur 100Khz 14-16 bits 300 transistors 500 portes 10 mWattsSimple rampe 100Khz 10-12 bits 100 transistors 100 portes 10 mWattsDouble rampe 100Khz >16 bits 150 transistors 150 portes 10 mWattsApprox. Successives 1Mhz 14-16 bits 300 transistors 500 portes 10 mWattsAlgorithmique 1Mhz 14-16 bits 100 transistors 100 portes 1 mWattFlash >100Mhz 12-14 bits 2500 transistors 5000 portes 1 WattSub-ranging 50Mhz 12-14 bits 600 transistors 500 portes 100 mWattsPipeline 100Mhz 10-12 bits 800 transistors 200 portes 100 mWattsSigma-delta 1Mhz >20 bits 1000 transistors 5000 portes 100 mWatts
Remarque :Comparateur : 10 transistorsAmpli-op : 50 transistorsDAC (N bits) : 2N transistors + 2N portesRegistre : 5 portes par bitCompteur : 6 portes par bit
Convertisseur Numérique Analogique ESIEE - Olivier Français
Acquisition de données VIII.1
CHAPITRE VIII
Les Convertisseurs Numériques Analogiques
Olivier Français, 2000
Convertisseur Numérique Analogique ESIEE - Olivier Français
Acquisition de données VIII.2
SOMMAIRE
I RÔLE ................................................................................................................................................................... 3
I.1 DÉFINITION ..................................................................................................................................................... 3I.2 PRINCIPE ......................................................................................................................................................... 3
II STRUCTURE DE CNA .................................................................................................................................... 3
II.1 CNA À RÉSISTANCES PONDÉRÉES (PARALLÈLES) .......................................................................................... 3II.2 RÉSEAU R-2R : STRUCTURE EN ÉCHELLE À COMMUTATION DE COURANT ..................................................... 4
III.2.1 Cas 1 cellule ......................................................................................................................................... 4III.2.2 Cas 2 cellules........................................................................................................................................ 5II.2.3 Cas n cellules ......................................................................................................................................... 5II.2.4 Exemple de CNA à réseau R-2R : AD7532 ou DAC830 ........................................................................ 6II.2.5 Modélisation d’un CNA R-2R ................................................................................................................ 6II.2.6 Montage de sortie associé...................................................................................................................... 6II.2.7 Glitch ..................................................................................................................................................... 8
III APPLICATION DES CNA : MULTIPLIEUR / DIVISEUR....................................................................... 8
III.1 MULTIPLIEUR ............................................................................................................................................... 8III.2 DIVISEUR...................................................................................................................................................... 9
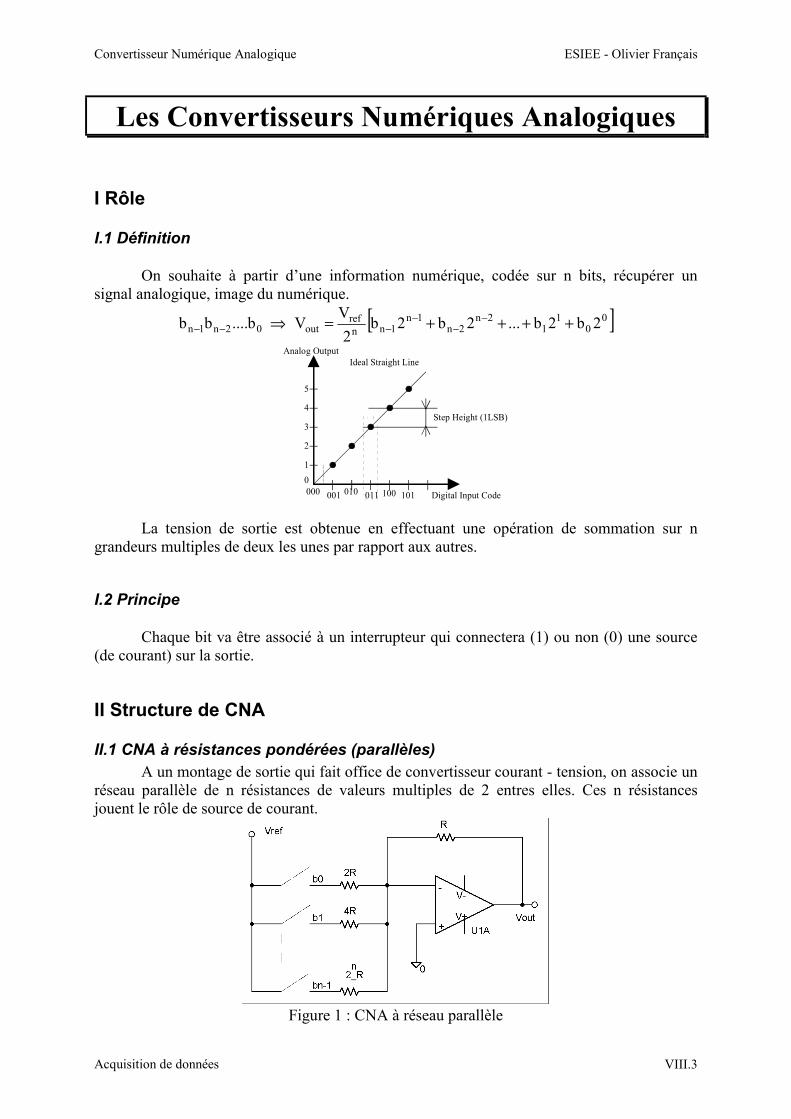
Convertisseur Numérique Analogique ESIEE - Olivier Français
Acquisition de données VIII.3
Les Convertisseurs Numériques Analogiques
I Rôle
I.1 Définition
On souhaite à partir d’une information numérique, codée sur n bits, récupérer unsignal analogique, image du numérique.
02n1n b....bb −− ⇒ [ ]00
11
2n2n
1n1nn
refout 2b2b...2b2b
2
VV ++++= −
−−
−
000 001 010 011 100 101
0
1
2
3
4
5
Ideal Straight LineAnalog Output
Digital Input Code
Step Height (1LSB)
La tension de sortie est obtenue en effectuant une opération de sommation sur ngrandeurs multiples de deux les unes par rapport aux autres.
I.2 Principe
Chaque bit va être associé à un interrupteur qui connectera (1) ou non (0) une source(de courant) sur la sortie.
II Structure de CNA
II.1 CNA à résistances pondérées (parallèles)A un montage de sortie qui fait office de convertisseur courant - tension, on associe un
réseau parallèle de n résistances de valeurs multiples de 2 entres elles. Ces n résistancesjouent le rôle de source de courant.
Figure 1 : CNA à réseau parallèle
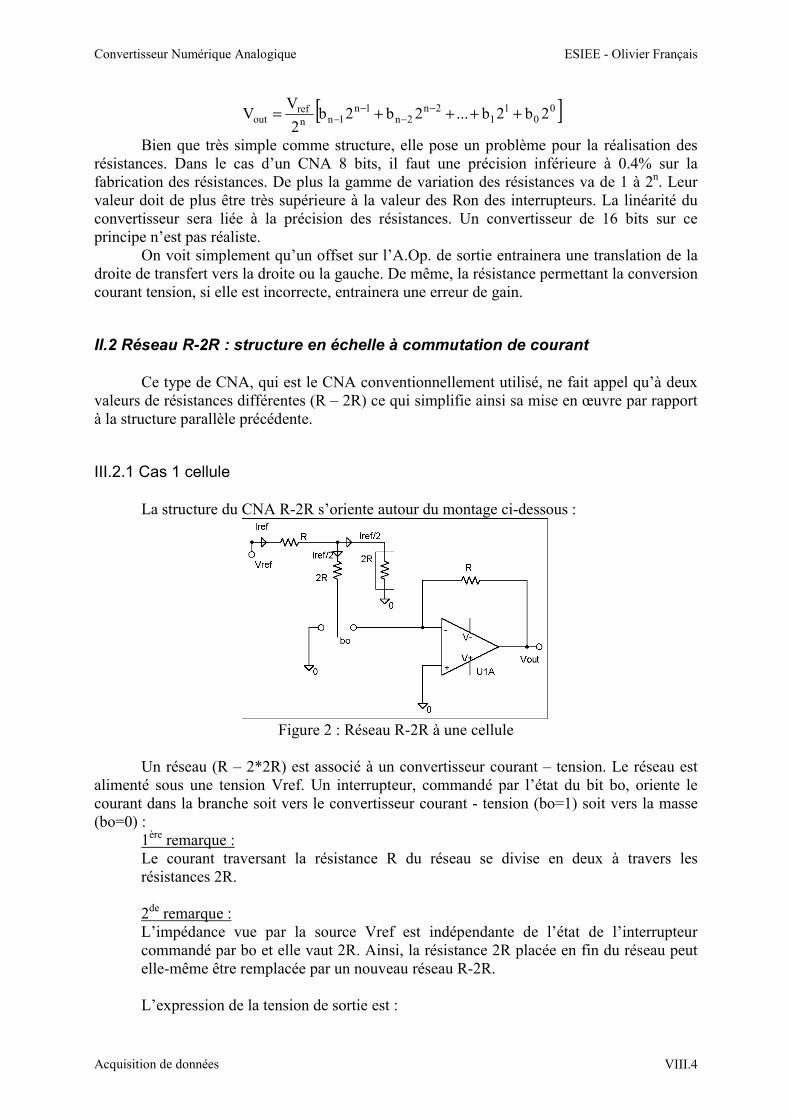
Convertisseur Numérique Analogique ESIEE - Olivier Français
Acquisition de données VIII.4
[ ]00
11
2n2n
1n1nn
refout 2b2b...2b2b
2
VV ++++= −
−−
−
Bien que très simple comme structure, elle pose un problème pour la réalisation desrésistances. Dans le cas d’un CNA 8 bits, il faut une précision inférieure à 0.4% sur lafabrication des résistances. De plus la gamme de variation des résistances va de 1 à 2n. Leurvaleur doit de plus être très supérieure à la valeur des Ron des interrupteurs. La linéarité duconvertisseur sera liée à la précision des résistances. Un convertisseur de 16 bits sur ceprincipe n’est pas réaliste.
On voit simplement qu’un offset sur l’A.Op. de sortie entrainera une translation de ladroite de transfert vers la droite ou la gauche. De même, la résistance permettant la conversioncourant tension, si elle est incorrecte, entrainera une erreur de gain.
II.2 Réseau R-2R : structure en échelle à commutation de courant
Ce type de CNA, qui est le CNA conventionnellement utilisé, ne fait appel qu’à deuxvaleurs de résistances différentes (R – 2R) ce qui simplifie ainsi sa mise en œuvre par rapportà la structure parallèle précédente.
III.2.1 Cas 1 cellule
La structure du CNA R-2R s’oriente autour du montage ci-dessous :
Figure 2 : Réseau R-2R à une cellule
Un réseau (R – 2*2R) est associé à un convertisseur courant – tension. Le réseau estalimenté sous une tension Vref. Un interrupteur, commandé par l’état du bit bo, oriente lecourant dans la branche soit vers le convertisseur courant - tension (bo=1) soit vers la masse(bo=0) :
1ère remarque :Le courant traversant la résistance R du réseau se divise en deux à travers lesrésistances 2R.
2de remarque :L’impédance vue par la source Vref est indépendante de l’état de l’interrupteurcommandé par bo et elle vaut 2R. Ainsi, la résistance 2R placée en fin du réseau peutelle-même être remplacée par un nouveau réseau R-2R.
L’expression de la tension de sortie est :
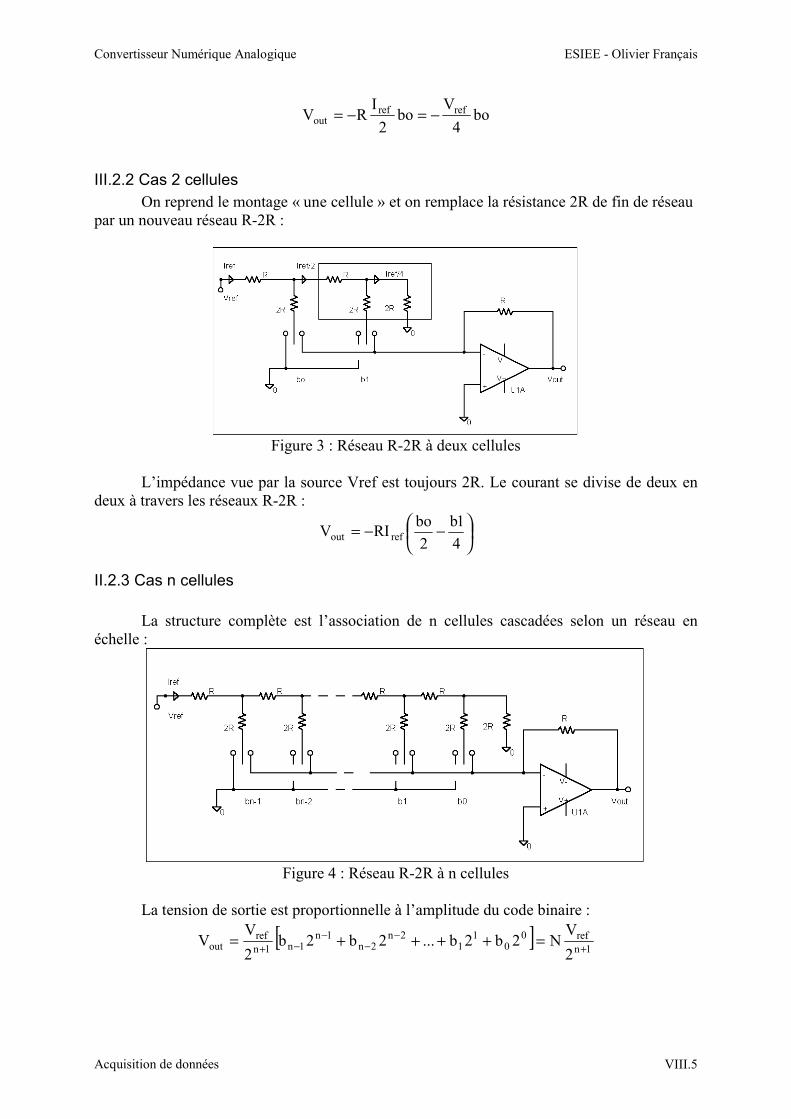
Convertisseur Numérique Analogique ESIEE - Olivier Français
Acquisition de données VIII.5
bo4
Vbo
2
IRV refref
out −=−=
III.2.2 Cas 2 cellulesOn reprend le montage « une cellule » et on remplace la résistance 2R de fin de réseau
par un nouveau réseau R-2R :
Figure 3 : Réseau R-2R à deux cellules
L’impédance vue par la source Vref est toujours 2R. Le courant se divise de deux endeux à travers les réseaux R-2R :
−−=
4
1b
2
boRIV refout
II.2.3 Cas n cellules
La structure complète est l’association de n cellules cascadées selon un réseau enéchelle :
Figure 4 : Réseau R-2R à n cellules
La tension de sortie est proportionnelle à l’amplitude du code binaire :
[ ]1n
ref00
11
2n2n
1n1n1n
refout
2
VN2b2b...2b2b
2
VV +
−−
−−+ =++++=
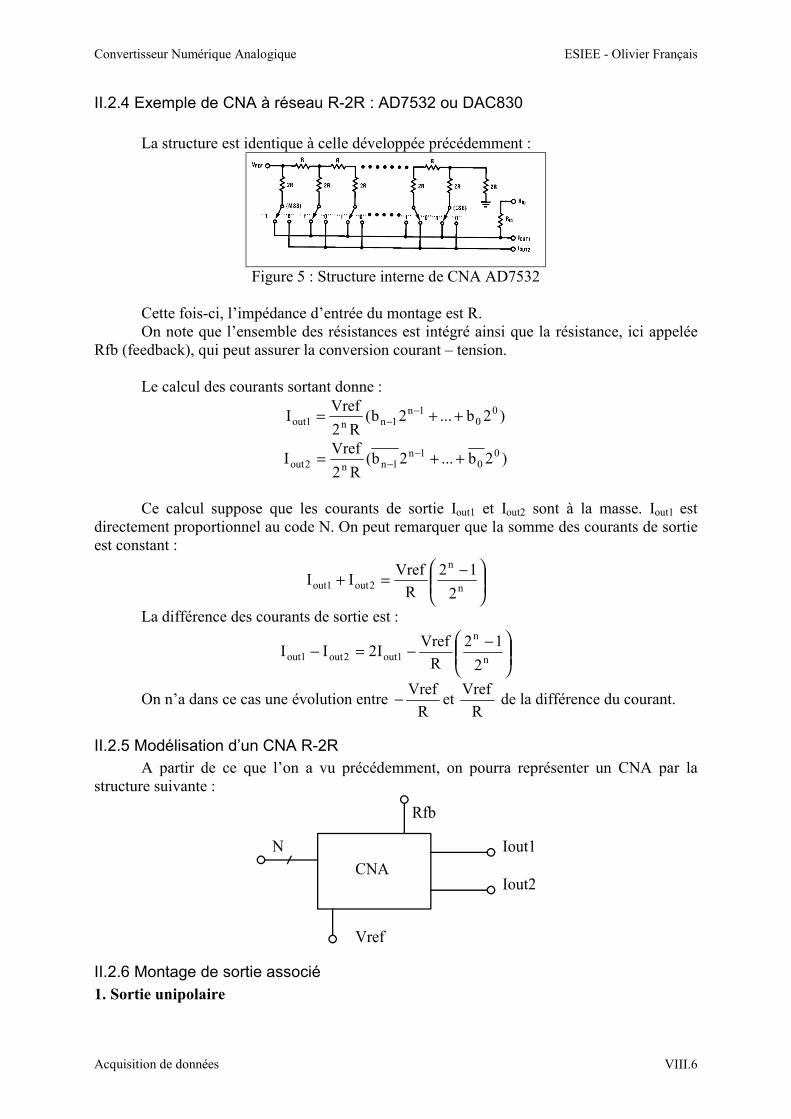
Convertisseur Numérique Analogique ESIEE - Olivier Français
Acquisition de données VIII.6
II.2.4 Exemple de CNA à réseau R-2R : AD7532 ou DAC830
La structure est identique à celle développée précédemment :
Figure 5 : Structure interne de CNA AD7532
Cette fois-ci, l’impédance d’entrée du montage est R.On note que l’ensemble des résistances est intégré ainsi que la résistance, ici appelée
Rfb (feedback), qui peut assurer la conversion courant – tension.
Le calcul des courants sortant donne :
)2b...2b(R2
VrefI 0
01n
1nn1out ++= −−
)2b...2b(R2
VrefI 0
01n
1nn2out ++= −−
Ce calcul suppose que les courants de sortie Iout1 et Iout2 sont à la masse. Iout1 estdirectement proportionnel au code N. On peut remarquer que la somme des courants de sortieest constant :
−=+n
n
2out1out2
12
R
VrefII
La différence des courants de sortie est :
−−=−n
n
1out2out1out2
12
R
VrefI2II
On n’a dans ce cas une évolution entre R
Vref− et R
Vref de la différence du courant.
II.2.5 Modélisation d’un CNA R-2RA partir de ce que l’on a vu précédemment, on pourra représenter un CNA par la
structure suivante :
CNA
Rfb
N
Vref
Iout1
Iout2
II.2.6 Montage de sortie associé
1. Sortie unipolaire
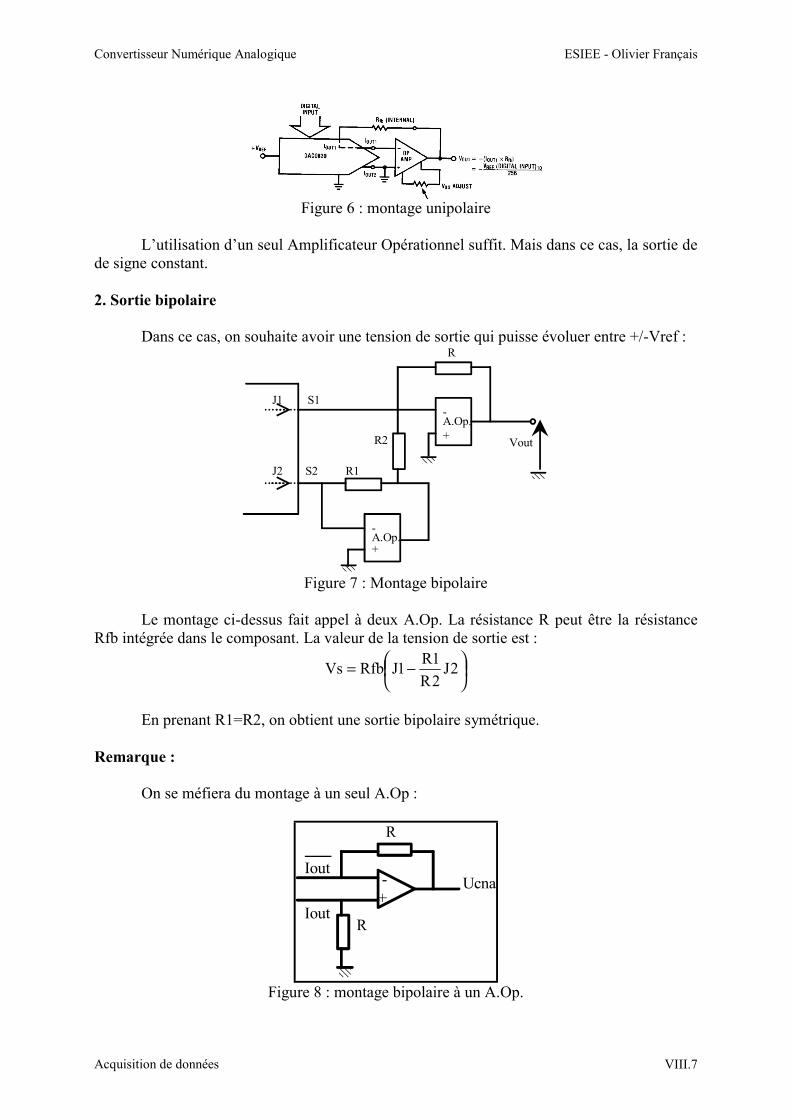
Convertisseur Numérique Analogique ESIEE - Olivier Français
Acquisition de données VIII.7
Figure 6 : montage unipolaire
L’utilisation d’un seul Amplificateur Opérationnel suffit. Mais dans ce cas, la sortie dede signe constant.
2. Sortie bipolaire
Dans ce cas, on souhaite avoir une tension de sortie qui puisse évoluer entre +/-Vref :
-
+
-
+
S1
S2
J1
J2
R
R1
R2 Vout
A.Op.
A.Op.
Figure 7 : Montage bipolaire
Le montage ci-dessus fait appel à deux A.Op. La résistance R peut être la résistanceRfb intégrée dans le composant. La valeur de la tension de sortie est :
−= 2J
2R
1R1JRfbVs
En prenant R1=R2, on obtient une sortie bipolaire symétrique.
Remarque :
On se méfiera du montage à un seul A.Op :
+-
Iout
Iout
Ucna
R
R
Figure 8 : montage bipolaire à un A.Op.
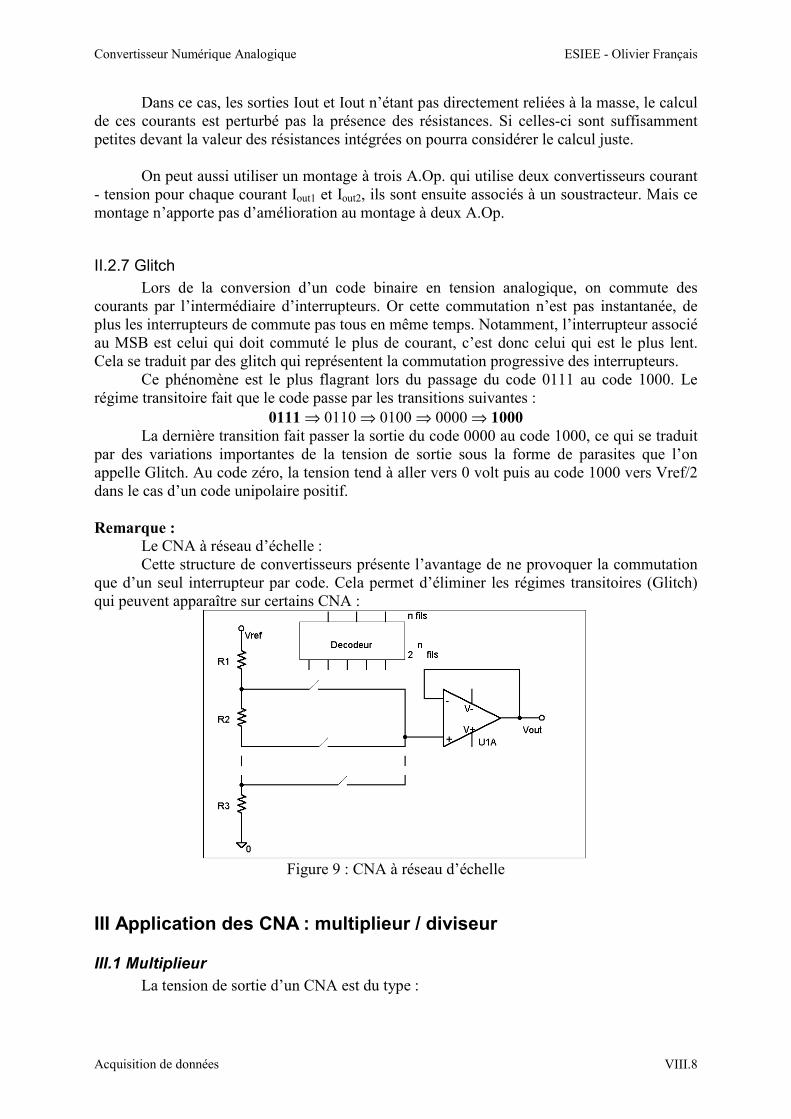
Convertisseur Numérique Analogique ESIEE - Olivier Français
Acquisition de données VIII.8
Dans ce cas, les sorties Iout et Iout n’étant pas directement reliées à la masse, le calculde ces courants est perturbé pas la présence des résistances. Si celles-ci sont suffisammentpetites devant la valeur des résistances intégrées on pourra considérer le calcul juste.
On peut aussi utiliser un montage à trois A.Op. qui utilise deux convertisseurs courant- tension pour chaque courant Iout1 et Iout2, ils sont ensuite associés à un soustracteur. Mais cemontage n’apporte pas d’amélioration au montage à deux A.Op.
II.2.7 GlitchLors de la conversion d’un code binaire en tension analogique, on commute des
courants par l’intermédiaire d’interrupteurs. Or cette commutation n’est pas instantanée, deplus les interrupteurs de commute pas tous en même temps. Notamment, l’interrupteur associéau MSB est celui qui doit commuté le plus de courant, c’est donc celui qui est le plus lent.Cela se traduit par des glitch qui représentent la commutation progressive des interrupteurs.
Ce phénomène est le plus flagrant lors du passage du code 0111 au code 1000. Lerégime transitoire fait que le code passe par les transitions suivantes :
0111 ⇒ 0110 ⇒ 0100 ⇒ 0000 ⇒ 1000La dernière transition fait passer la sortie du code 0000 au code 1000, ce qui se traduit
par des variations importantes de la tension de sortie sous la forme de parasites que l’onappelle Glitch. Au code zéro, la tension tend à aller vers 0 volt puis au code 1000 vers Vref/2dans le cas d’un code unipolaire positif.
Remarque :Le CNA à réseau d’échelle :Cette structure de convertisseurs présente l’avantage de ne provoquer la commutation
que d’un seul interrupteur par code. Cela permet d’éliminer les régimes transitoires (Glitch)qui peuvent apparaître sur certains CNA :
Figure 9 : CNA à réseau d’échelle
III Application des CNA : multiplieur / diviseur
III.1 MultiplieurLa tension de sortie d’un CNA est du type :
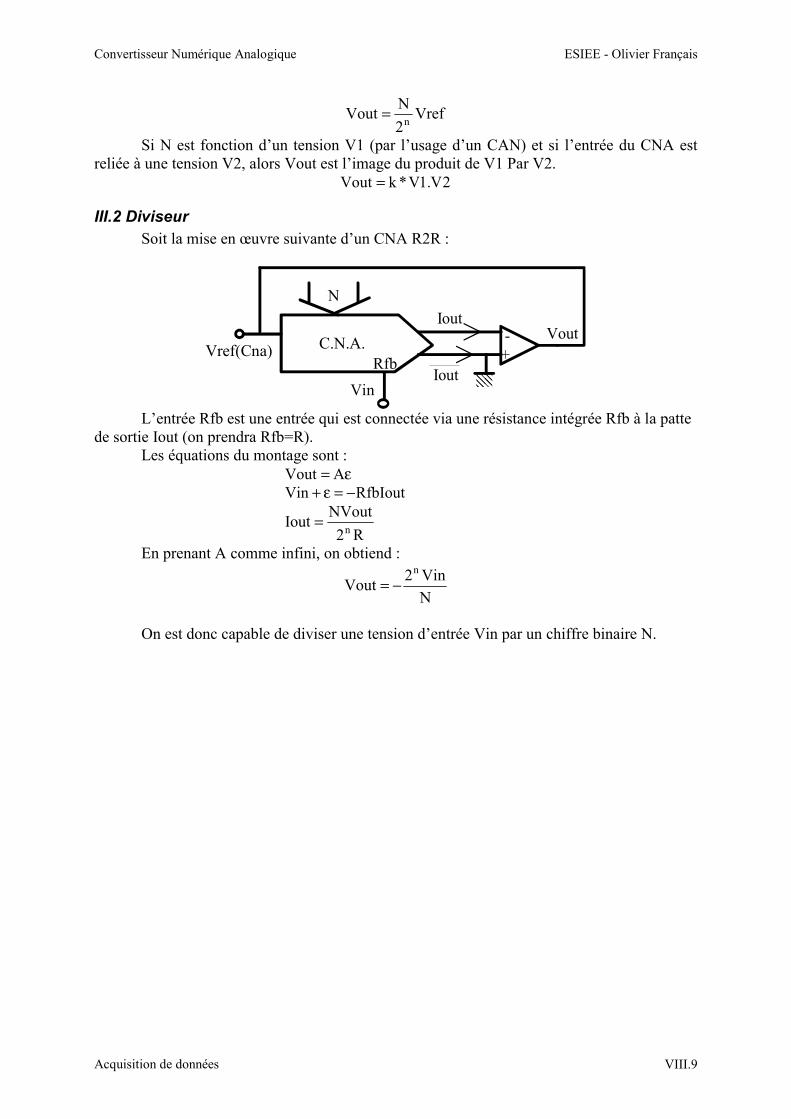
Convertisseur Numérique Analogique ESIEE - Olivier Français
Acquisition de données VIII.9
Vref2
NVout
n=
Si N est fonction d’un tension V1 (par l’usage d’un CAN) et si l’entrée du CNA estreliée à une tension V2, alors Vout est l’image du produit de V1 Par V2.
2V.1V*kVout =
III.2 DiviseurSoit la mise en œuvre suivante d’un CNA R2R :
+-C.N.A.Vref(Cna)
N
Vin
Rfb
VoutIout
Iout
L’entrée Rfb est une entrée qui est connectée via une résistance intégrée Rfb à la pattede sortie Iout (on prendra Rfb=R).
Les équations du montage sont :ε= AVout
RfbIoutVin −=ε+
R2
NVoutIout
n=
En prenant A comme infini, on obtiend :
N
Vin2Vout
n
−=
On est donc capable de diviser une tension d’entrée Vin par un chiffre binaire N.





























