Embed Size (px)
Citation preview
Sciences Industriellesde l'ingénieur
CI 2 – SLCI : ÉTUDE DU COMPORTEMENT DES SYSTÈMES
LINÉAIRES CONTINUS INVARIANTS
CHAPITRE 7 – RÉPONSES HARMONIQUES – DIAGRAMMES DE BODE
Amortisseur d’un véhicule automobile Schématisation du mécanisme Réponses harmoniques
Savoir
Savoirs :
– Rés.-C5 : Performances d’un système asservi
– Rés-C5-S2 : Tracer une réponse temporelle ou fréquentielle
1 Présentation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.1 Caractérisation d'un signal sinusoïdal. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1
1.2 Réponse temporelle d'un système d'ordre 1 à une entrée sinusoïdale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
2 Diagrammes de Bode. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2
2.1 Calcul complexe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
2.2 Dé�nition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2.3 Représentation d'un système asservi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5
3 Réponse harmonique d'un gain . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5
4 Réponse harmonique d'un intégrateur . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
4.1 Réponse harmonique d'un intégrateur . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
4.2 Réponse harmonique système proportionnel intégral . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .6
4.3 Réponse harmonique d'un dérivateur . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
5 Réponse harmonique d'un système du premier ordre . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .7
5.1 Tracé réel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
5.2 Tracé asymptotique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
6 Réponse harmonique d'un système du second ordre . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
6.1 Cas où ξ≥ 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
6.2 Cas où ξ< 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .10
Ce document évolue. Merci de signaler toutes erreurs ou coquilles.
2013 – 2014Xavier PESSOLES
1 CI 2 : SLCI – CoursCh 7 : Réponses harmoniques – P
Sciences Industriellesde l'ingénieur
1 Présentation
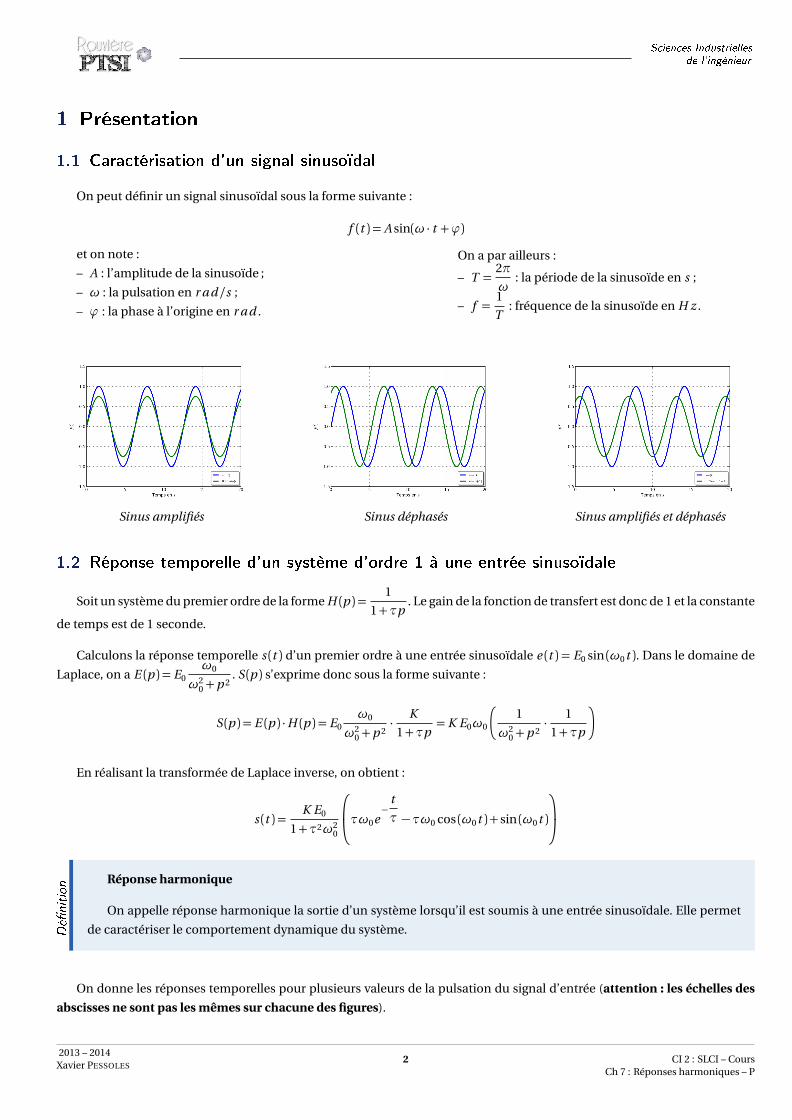
1.1 Caractérisation d'un signal sinusoïdal
On peut définir un signal sinusoïdal sous la forme suivante :
f (t ) = A sin(ω · t +ϕ)
et on note :
– A : l’amplitude de la sinusoïde ;
– ω : la pulsation en r a d /s ;
– ϕ : la phase à l’origine en r a d .
On a par ailleurs :
– T =2π
ω: la période de la sinusoïde en s ;
– f =1
T: fréquence de la sinusoïde en H z .
Sinus amplifiés Sinus déphasés Sinus amplifiés et déphasés
1.2 Réponse temporelle d'un système d'ordre 1 à une entrée sinusoïdale
Soit un système du premier ordre de la forme H (p ) =1
1+τp. Le gain de la fonction de transfert est donc de 1 et la constante
de temps est de 1 seconde.
Calculons la réponse temporelle s (t ) d’un premier ordre à une entrée sinusoïdale e (t ) = E0 sin (ω0t ). Dans le domaine de
Laplace, on a E (p ) = E0ω0
ω20+p 2
. S (p ) s’exprime donc sous la forme suivante :
S (p ) = E (p ) ·H (p ) = E0ω0
ω20+p 2
·K
1+τp= K E0ω0
�
1
ω20+p 2
·1
1+τp
�
En réalisant la transformée de Laplace inverse, on obtient :
s (t ) =K E0
1+τ2ω20
τω0e−
t
τ −τω0 cos (ω0t ) + sin (ω0t )
Dé�nition Réponse harmonique
On appelle réponse harmonique la sortie d’un système lorsqu’il est soumis à une entrée sinusoïdale. Elle permet
de caractériser le comportement dynamique du système.
On donne les réponses temporelles pour plusieurs valeurs de la pulsation du signal d’entrée (attention : les échelles des
abscisses ne sont pas les mêmes sur chacune des figures).
2013 – 2014Xavier PESSOLES
2 CI 2 : SLCI – CoursCh 7 : Réponses harmoniques – P
Sciences Industriellesde l'ingénieur
ω0 = 0, 01 r a d /s – T = 200π s ω0 = 0, 1 r a d /s – T = 20π s ω0 = 1 r a d /s – T = 2π s ω0 = 10 r a d /s – T = 0, 2π s
On constate que quand la pulsation du signal augmente, on observe un déphasage entre le signal d’entrée et le signal de
sortie ainsi qu’une atténuation du signal de sortie.
2 Diagrammes de Bode
2.1 Calcul complexe
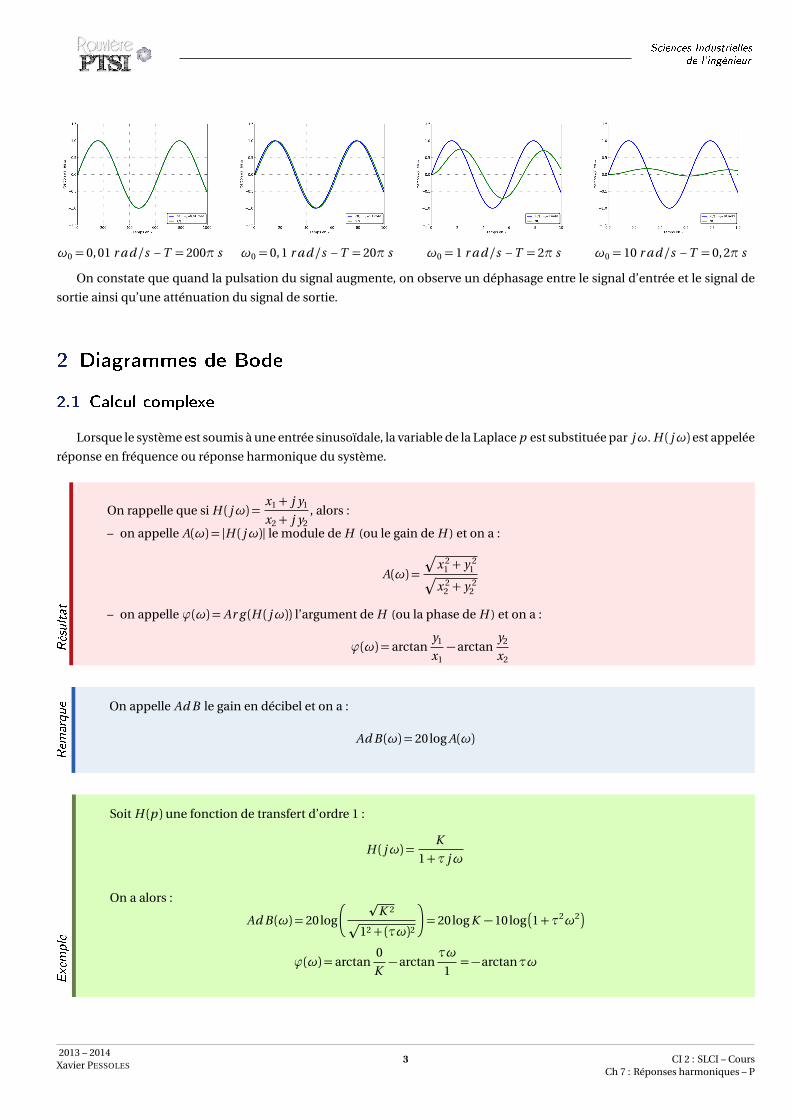
Lorsque le système est soumis à une entrée sinusoïdale, la variable de la Laplace p est substituée par jω. H ( jω) est appelée
réponse en fréquence ou réponse harmonique du système.
Résultat
On rappelle que si H ( jω) =x1+ j y1
x2+ j y2, alors :
– on appelle A(ω) = |H ( jω)| le module de H (ou le gain de H ) et on a :
A(ω) =
Æ
x 21 + y 2
1Æ
x 22 + y 2
2
– on appelle ϕ(ω) = Ar g (H ( jω)) l’argument de H (ou la phase de H ) et on a :
ϕ(ω) = arctany1
x1−arctan
y2
x2
Rem
arque On appelle Ad B le gain en décibel et on a :
Ad B (ω) = 20 log A(ω)
Exemple
Soit H (p ) une fonction de transfert d’ordre 1 :
H ( jω) =K
1+τ jω
On a alors :
Ad B (ω) = 20 log
� pK 2
p
12+ (τω)2
�
= 20 log K −10 log�
1+τ2ω2�
ϕ(ω) = arctan0
K−arctan
τω
1=−arctanτω
2013 – 2014Xavier PESSOLES
3 CI 2 : SLCI – CoursCh 7 : Réponses harmoniques – P
Sciences Industriellesde l'ingénieur
2.2 Dé�nition
Dé�nition
Diagrammes de Bode
Les diagrammes de Bode représentent deux courbes sur deux diagrammes distincts dans des repère semi
logarithmiques :
– la courbe de gain en décibel en fonction de la pulsationω ;
– la courbe de phase (en degrés ou radians) en fonction de la pulsationω.
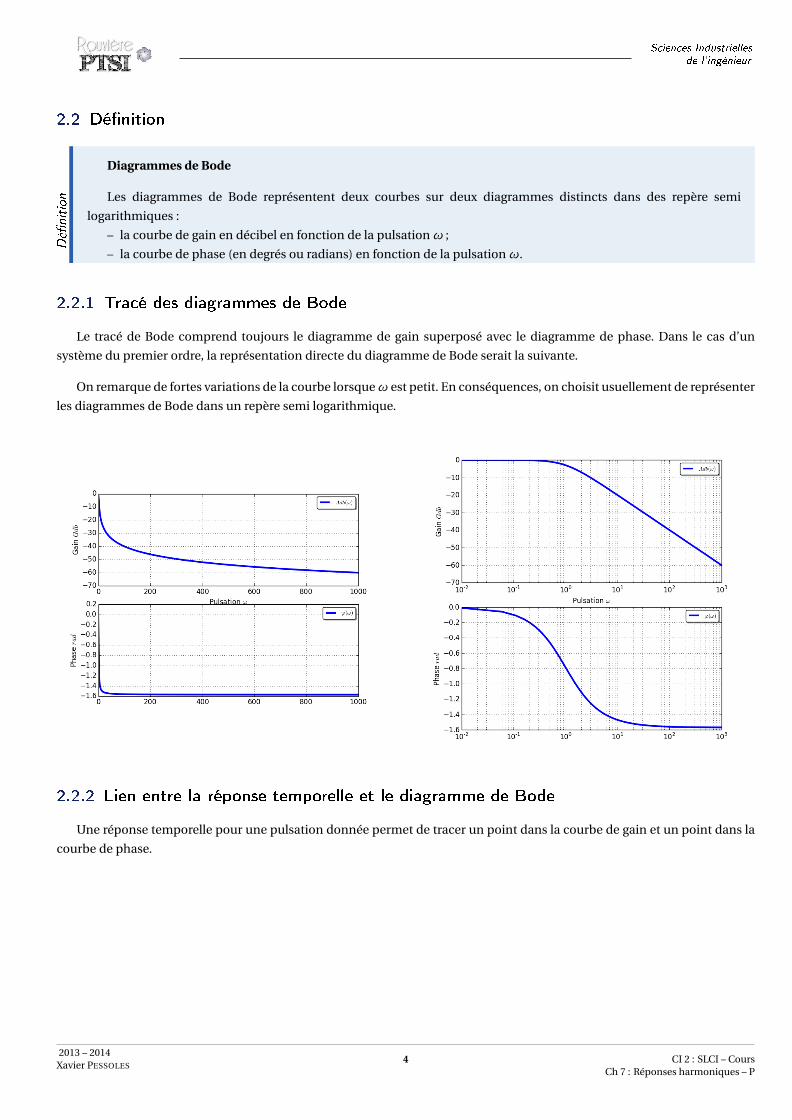
2.2.1 Tracé des diagrammes de Bode
Le tracé de Bode comprend toujours le diagramme de gain superposé avec le diagramme de phase. Dans le cas d’un
système du premier ordre, la représentation directe du diagramme de Bode serait la suivante.
On remarque de fortes variations de la courbe lorsqueω est petit. En conséquences, on choisit usuellement de représenter
les diagrammes de Bode dans un repère semi logarithmique.
2.2.2 Lien entre la réponse temporelle et le diagramme de Bode
Une réponse temporelle pour une pulsation donnée permet de tracer un point dans la courbe de gain et un point dans la
courbe de phase.
2013 – 2014Xavier PESSOLES
4 CI 2 : SLCI – CoursCh 7 : Réponses harmoniques – P
Sciences Industriellesde l'ingénieur
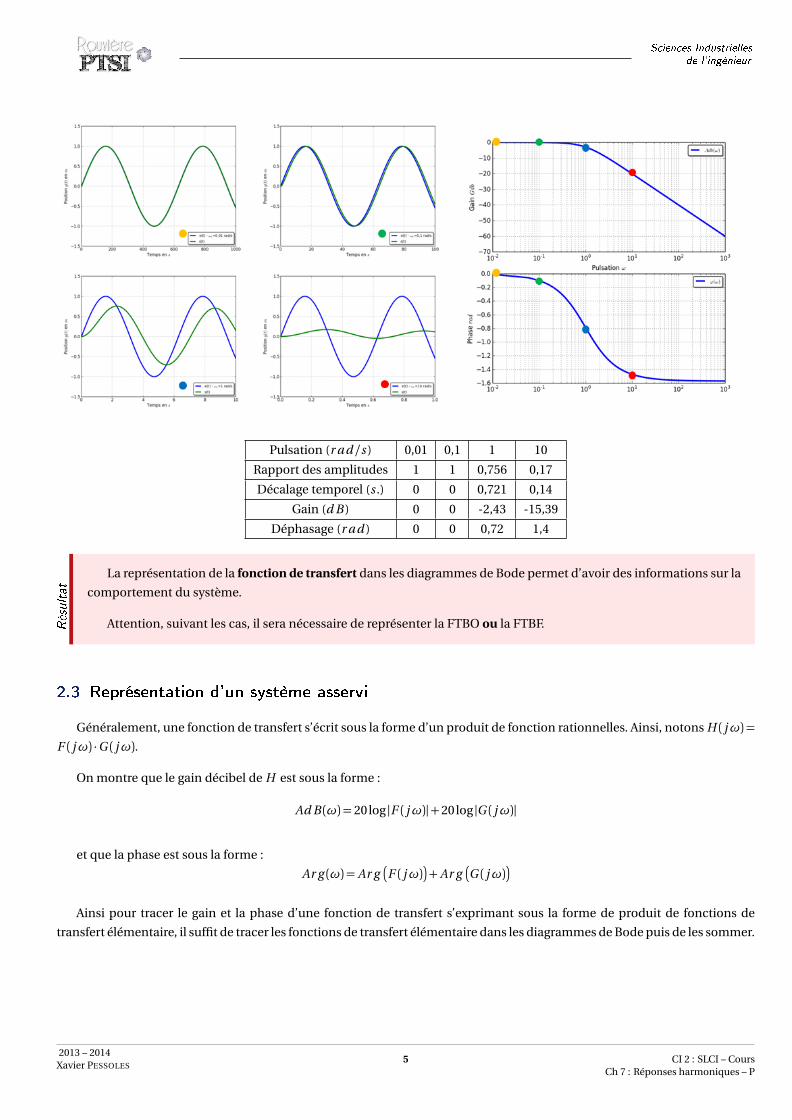
Pulsation (r a d /s ) 0,01 0,1 1 10
Rapport des amplitudes 1 1 0,756 0,17
Décalage temporel (s .) 0 0 0,721 0,14
Gain (d B ) 0 0 -2,43 -15,39
Déphasage (r a d ) 0 0 0,72 1,4
Résultat
La représentation de la fonction de transfert dans les diagrammes de Bode permet d’avoir des informations sur la
comportement du système.
Attention, suivant les cas, il sera nécessaire de représenter la FTBO ou la FTBF.
2.3 Représentation d'un système asservi
Généralement, une fonction de transfert s’écrit sous la forme d’un produit de fonction rationnelles. Ainsi, notons H ( jω) =F ( jω) ·G ( jω).
On montre que le gain décibel de H est sous la forme :
Ad B (ω) = 20 log |F ( jω)|+20 log |G ( jω)|
et que la phase est sous la forme :
Ar g (ω) = Ar g�
F ( jω)�
+Ar g�
G ( jω)�
Ainsi pour tracer le gain et la phase d’une fonction de transfert s’exprimant sous la forme de produit de fonctions de
transfert élémentaire, il suffit de tracer les fonctions de transfert élémentaire dans les diagrammes de Bode puis de les sommer.
2013 – 2014Xavier PESSOLES
5 CI 2 : SLCI – CoursCh 7 : Réponses harmoniques – P
Sciences Industriellesde l'ingénieur
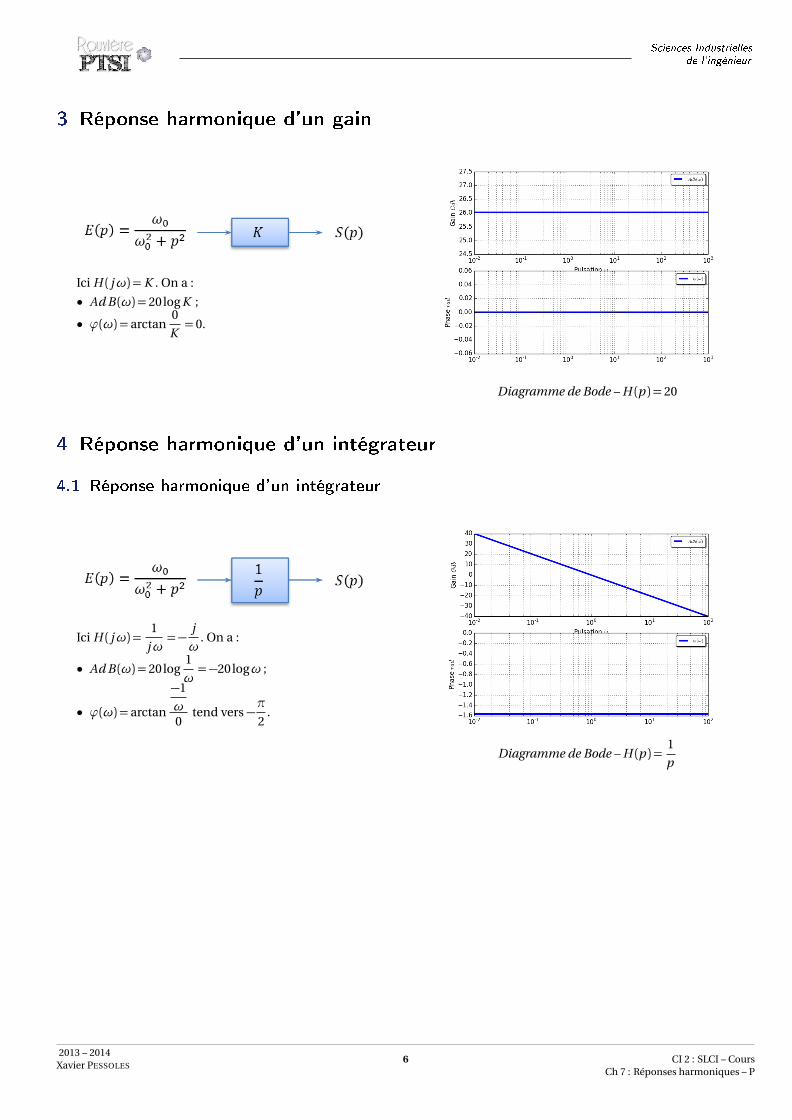
3 Réponse harmonique d'un gain
Ici H ( jω) = K . On a :
• Ad B (ω) = 20 log K ;
• ϕ(ω) = arctan0
K= 0.
Diagramme de Bode – H (p ) = 20
4 Réponse harmonique d'un intégrateur
4.1 Réponse harmonique d'un intégrateur
Ici H ( jω) =1
jω=−
j
ω. On a :
• Ad B (ω) = 20 log1
ω=−20 logω ;
• ϕ(ω) = arctan
−1
ω0
tend vers −π
2.
Diagramme de Bode – H (p ) =1
p
2013 – 2014Xavier PESSOLES
6 CI 2 : SLCI – CoursCh 7 : Réponses harmoniques – P
Sciences Industriellesde l'ingénieur
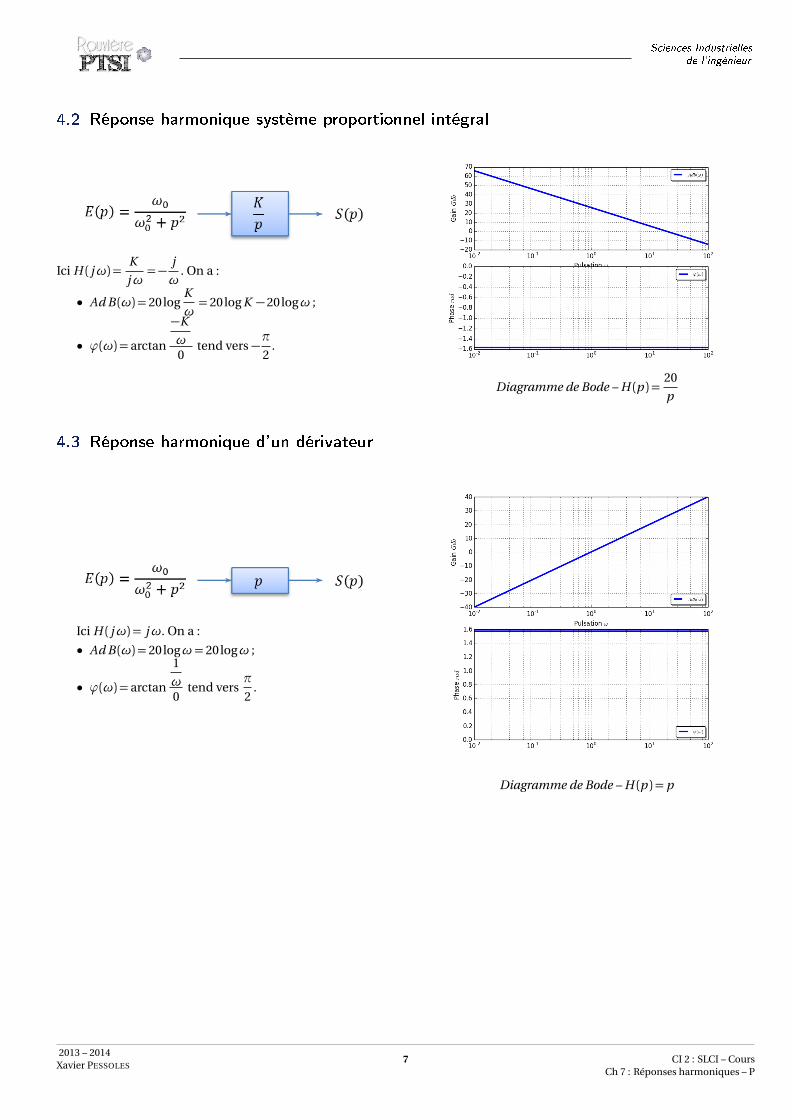
4.2 Réponse harmonique système proportionnel intégral
Ici H ( jω) =K
jω=−
j
ω. On a :
• Ad B (ω) = 20 logK
ω= 20 log K −20 logω ;
• ϕ(ω) = arctan
−K
ω0
tend vers −π
2.
Diagramme de Bode – H (p ) =20
p
4.3 Réponse harmonique d'un dérivateur
Ici H ( jω) = jω. On a :
• Ad B (ω) = 20 logω= 20 logω ;
• ϕ(ω) = arctan
1
ω0
tend versπ
2.
Diagramme de Bode – H (p ) = p
2013 – 2014Xavier PESSOLES
7 CI 2 : SLCI – CoursCh 7 : Réponses harmoniques – P
Sciences Industriellesde l'ingénieur
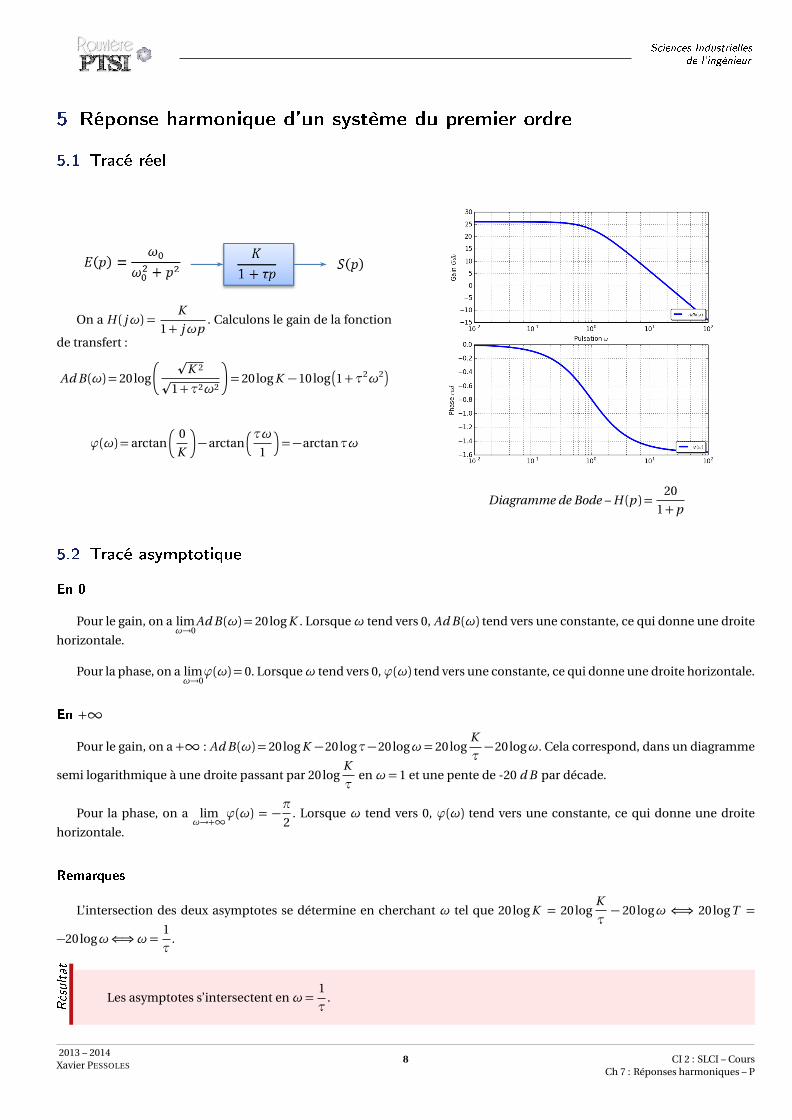
5 Réponse harmonique d'un système du premier ordre
5.1 Tracé réel
On a H ( jω) =K
1+ jωp. Calculons le gain de la fonction
de transfert :
Ad B (ω) = 20 log
� pK 2
p1+τ2ω2
�
= 20 log K −10 log�
1+τ2ω2�
ϕ(ω) = arctan�
0
K
�
−arctan�τω
1
�
=−arctanτω
Diagramme de Bode – H (p ) =20
1+p
5.2 Tracé asymptotique
En 0
Pour le gain, on a limω→0
Ad B (ω) = 20 log K . Lorsqueω tend vers 0, Ad B (ω) tend vers une constante, ce qui donne une droite
horizontale.
Pour la phase, on a limω→0ϕ(ω) = 0. Lorsqueω tend vers 0,ϕ(ω) tend vers une constante, ce qui donne une droite horizontale.
En +∞
Pour le gain, on a +∞ : Ad B (ω) = 20 log K −20 logτ−20 logω= 20 logK
τ−20 logω. Cela correspond, dans un diagramme
semi logarithmique à une droite passant par 20 logK
τenω= 1 et une pente de -20 d B par décade.
Pour la phase, on a limω→+∞
ϕ(ω) = −π
2. Lorsque ω tend vers 0, ϕ(ω) tend vers une constante, ce qui donne une droite
horizontale.
Remarques
L’intersection des deux asymptotes se détermine en cherchant ω tel que 20 log K = 20 logK
τ− 20 logω ⇐⇒ 20 log T =
−20 logω⇐⇒ω=1
τ.
Résultat
Les asymptotes s’intersectent enω=1
τ.
2013 – 2014Xavier PESSOLES
8 CI 2 : SLCI – CoursCh 7 : Réponses harmoniques – P
Sciences Industriellesde l'ingénieur
Calculons la valeur du gain au passage deω=1
τ:
Ad B�
1
τ
�
= 20 log K −20 logp
1+1' 20 log K −3
On a donc une atténuation de −3 d B enω=1
τ.
Par ailleurs,�
�
�
�
H�
j1
τ
�
�
�
�
�
=
�
�
�
�
K
1+ j
�
�
�
�
=Kp
2= K
p2
2
Attention
Une atténuation de−3 d B n’est pas anodine. Elle correspond à une atténuation du signal de près de 30% en régime
permanent.
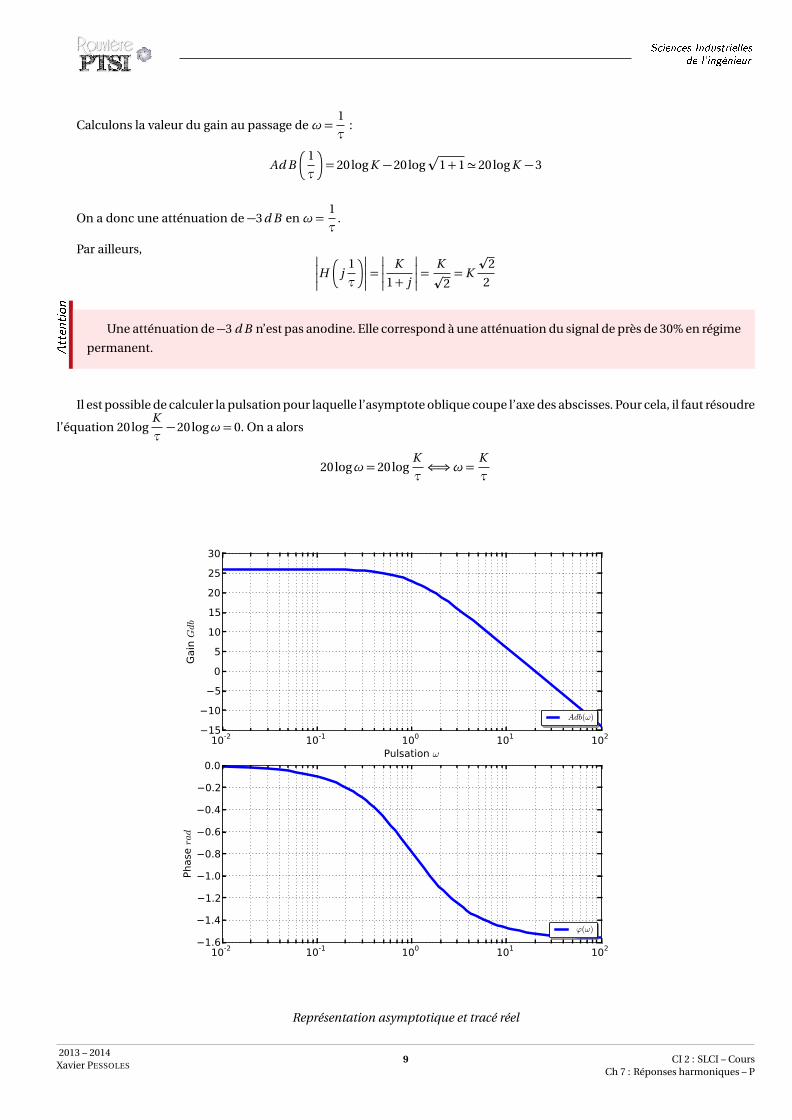
Il est possible de calculer la pulsation pour laquelle l’asymptote oblique coupe l’axe des abscisses. Pour cela, il faut résoudre
l’équation 20 logK
τ−20 logω= 0. On a alors
20 logω= 20 logK
τ⇐⇒ω=
K
τ
10-2 10-1 100 101 102
Pulsation ω
15
10
5
0
5
10
15
20
25
30
Gain
Gdb
Adb(ω)
10-2 10-1 100 101 1021.6
1.4
1.2
1.0
0.8
0.6
0.4
0.2
0.0
Phase
rad
ϕ(ω)
Représentation asymptotique et tracé réel
2013 – 2014Xavier PESSOLES
9 CI 2 : SLCI – CoursCh 7 : Réponses harmoniques – P
Sciences Industriellesde l'ingénieur
6 Réponse harmonique d'un système du second ordre
6.1 Cas où ξ≥ 1
Dans ce cas, le dénominateur de la fonction de transfert peut se factoriser sous la forme : H (p ) =K
�
1+τ1p� �
1+τ2p� .
Le tracé de cette fonction de transfert revient à tracer les diagrammes de Bode des fonctions de transfert suivantes :
– H1(p ) = K ;
– H2(p ) =1
1+τ1p;
– H3(p ) =1
1+τ2p.
On peut alors sommer les 3 fonctions de transfert.
Tracer le diagramme de Bode asymptotique de la fonction de transfert H (p ) =20
�
1+p� �
1+10p� .
10-2 10-1 100 101 102
Pulsation ω
50
40
30
20
10
0
10
20
30
Gain
Gdb
10-2 10-1 100 101 102
3.0
2.5
2.0
1.5
1.0
0.5
0.0
Phase
rad
2013 – 2014Xavier PESSOLES
10 CI 2 : SLCI – CoursCh 7 : Réponses harmoniques – P
Sciences Industriellesde l'ingénieur
Diagramme de Bode – H (p ) =20
�
1+p� �
1+10p�
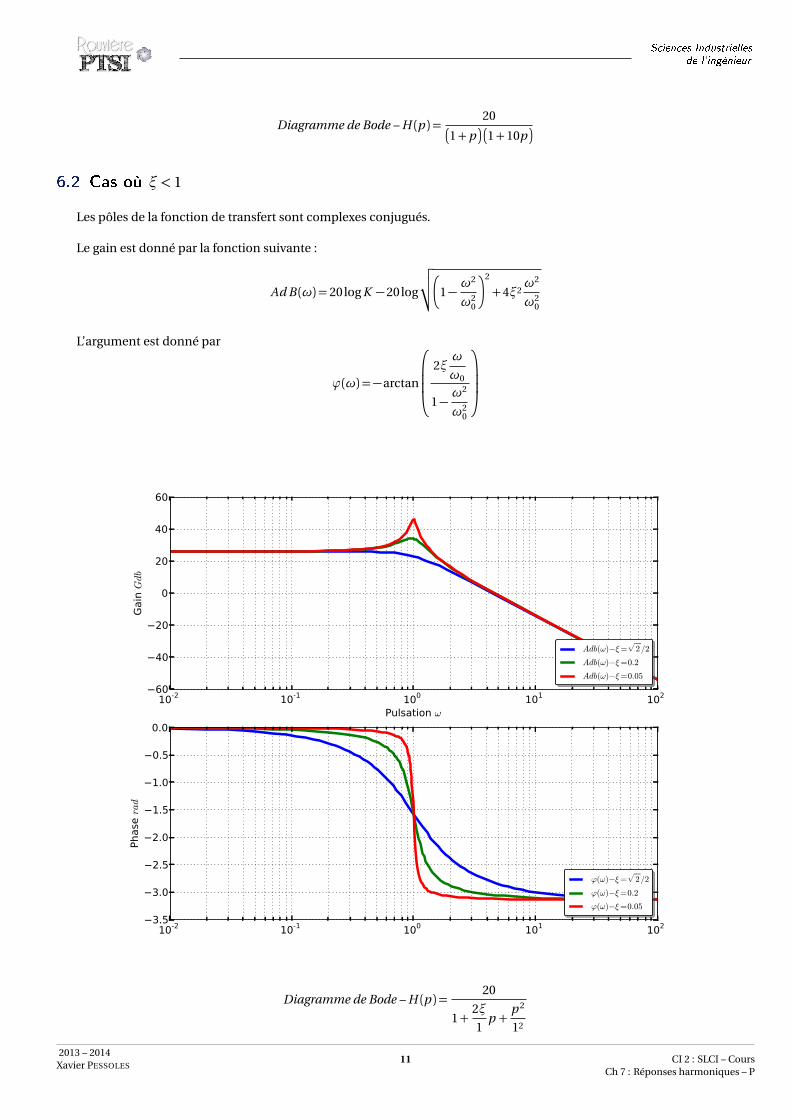
6.2 Cas où ξ< 1
Les pôles de la fonction de transfert sont complexes conjugués.
Le gain est donné par la fonction suivante :
Ad B (ω) = 20 log K −20 log
√
√
√
�
1−ω2
ω20
�2
+4ξ2ω2
ω20
L’argument est donné par
ϕ(ω) =−arctan
2ξω
ω0
1−ω2
ω20
10-2 10-1 100 101 102
Pulsation ω
60
40
20
0
20
40
60
Gain
Gdb
Adb(ω)−ξ=√
2/2
Adb(ω)−ξ=0.2
Adb(ω)−ξ=0.05
10-2 10-1 100 101 1023.5
3.0
2.5
2.0
1.5
1.0
0.5
0.0
Phase
rad
ϕ(ω)−ξ=√
2/2
ϕ(ω)−ξ=0.2
ϕ(ω)−ξ=0.05
Diagramme de Bode – H (p ) =20
1+2ξ
1p +
p 2
12
2013 – 2014Xavier PESSOLES
11 CI 2 : SLCI – CoursCh 7 : Réponses harmoniques – P
Sciences Industriellesde l'ingénieur
Résultat
Phénomène de résonance
Le phénomène de résonance s’observe lorsque ξ<
p2
2.
La pulsation de résonance est inférieure à la pulsation propre du système :
ωr =ω0
p
1−2ξ2
À la résonance, l’amplitude maximale est de
Ama x =K
2ξp
1−ξ2
(Attention, sur le diagramme de Bode, on lit 20 log Ama x lorsqueω=ωr .
Références
[1] Jean-Pierre Pupier, SLCI : Réponse harmonique des systèmes du premier et du second ordre. PTSI – Lycée Rouvière de
Toulon.
[2] Joël Boiron, SLCI : Étude générale des systèmes fondamentaux du premier et du deuxième ordre. PTSI – Lycée Gustave
Eiffel de Bordeaux.
2013 – 2014Xavier PESSOLES
12 CI 2 : SLCI – CoursCh 7 : Réponses harmoniques – P


















![[Elec1755] lignes de transmission en régime harmonique](https://img.pdfslide.fr/doc/110x75/58a285551a28ab891a8b6d21/elec1755-lignes-de-transmission-en-regime-harmonique.jpg)