Embed Size (px)
Citation preview
PTSI TP 5 - PORTAIL CI3 1
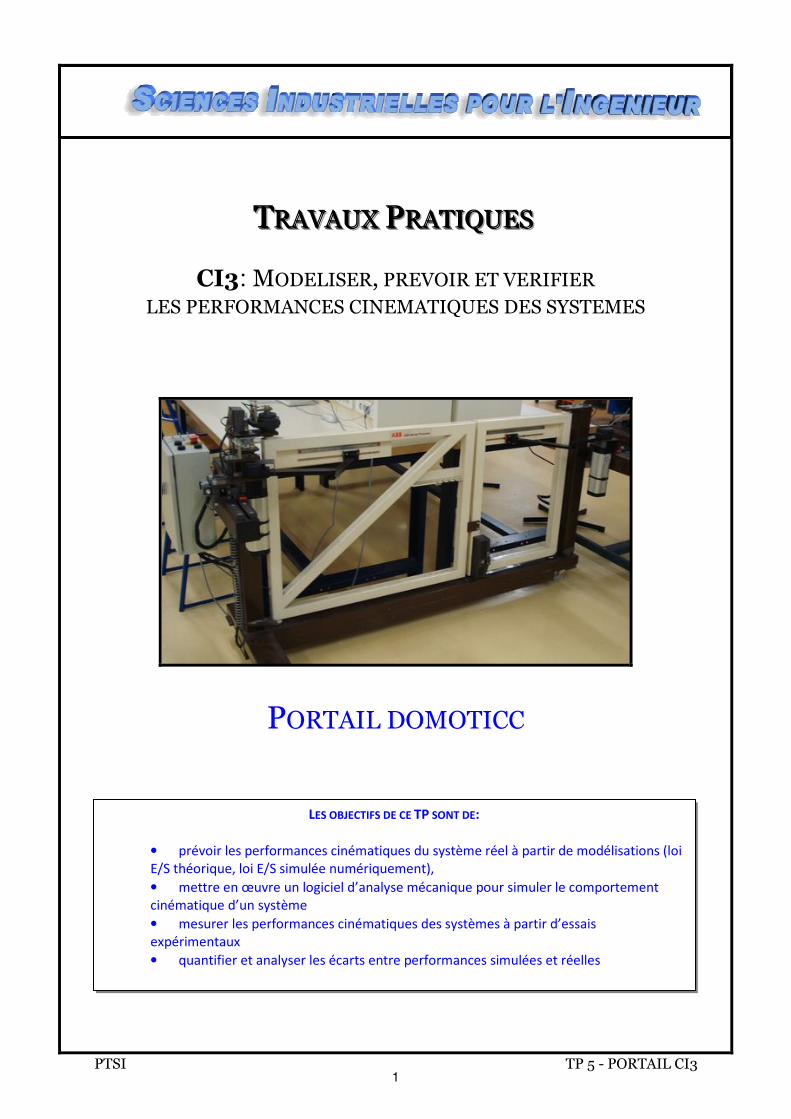
TTTRRRAAAVVVAAAUUUXXX PPPRRRAAATTTIIIQQQUUUEEESSS
CI3: MODELISER, PREVOIR ET VERIFIER LES PERFORMANCES CINEMATIQUES DES SYSTEMES
PORTAIL DOMOTICC
LES OBJECTIFS DE CE TP SONT DE:
• prévoir les performances cinématiques du système réel à partir de modélisations (loi E/S théorique, loi E/S simulée numériquement),
• mettre en œuvre un logiciel d’analyse mécanique pour simuler le comportement cinématique d’un système
• mesurer les performances cinématiques des systèmes à partir d’essais expérimentaux
• quantifier et analyser les écarts entre performances simulées et réelles
CI3 : MODELISER, PREVOIR ET VERIFIER LES PERFORMANCES CINEMATIQUES DES SYSTEMES
PTSI TP 5 - PORTAIL CI3 2
MISE EN SITUATION
PRESENTATION
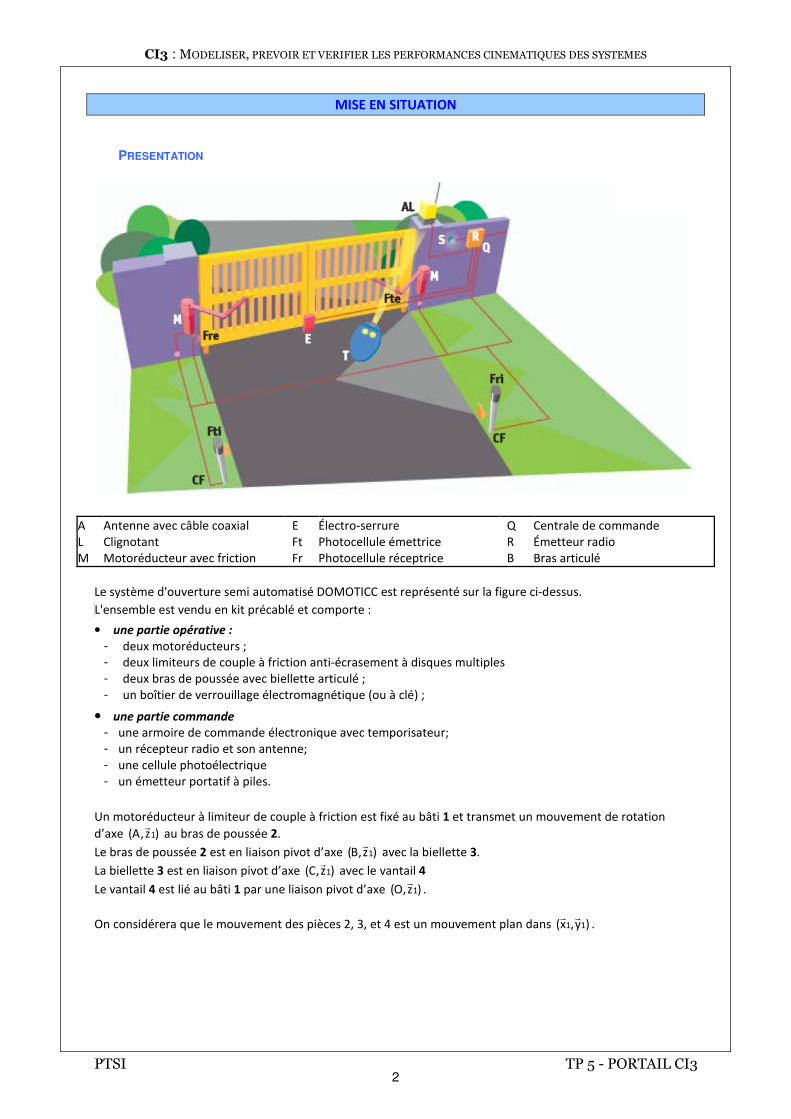
A Antenne avec câble coaxial E Électro-serrure Q Centrale de commande L Clignotant Ft Photocellule émettrice R Émetteur radio M Motoréducteur avec friction Fr Photocellule réceptrice B Bras articulé
Le système d'ouverture semi automatisé DOMOTICC est représenté sur la figure ci-dessus.
L'ensemble est vendu en kit précablé et comporte :
• une partie opérative :
- deux motoréducteurs ; - deux limiteurs de couple à friction anti-écrasement à disques multiples - deux bras de poussée avec biellette articulé ; - un boîtier de verrouillage électromagnétique (ou à clé) ;
• une partie commande
- une armoire de commande électronique avec temporisateur; - un récepteur radio et son antenne; - une cellule photoélectrique - un émetteur portatif à piles.
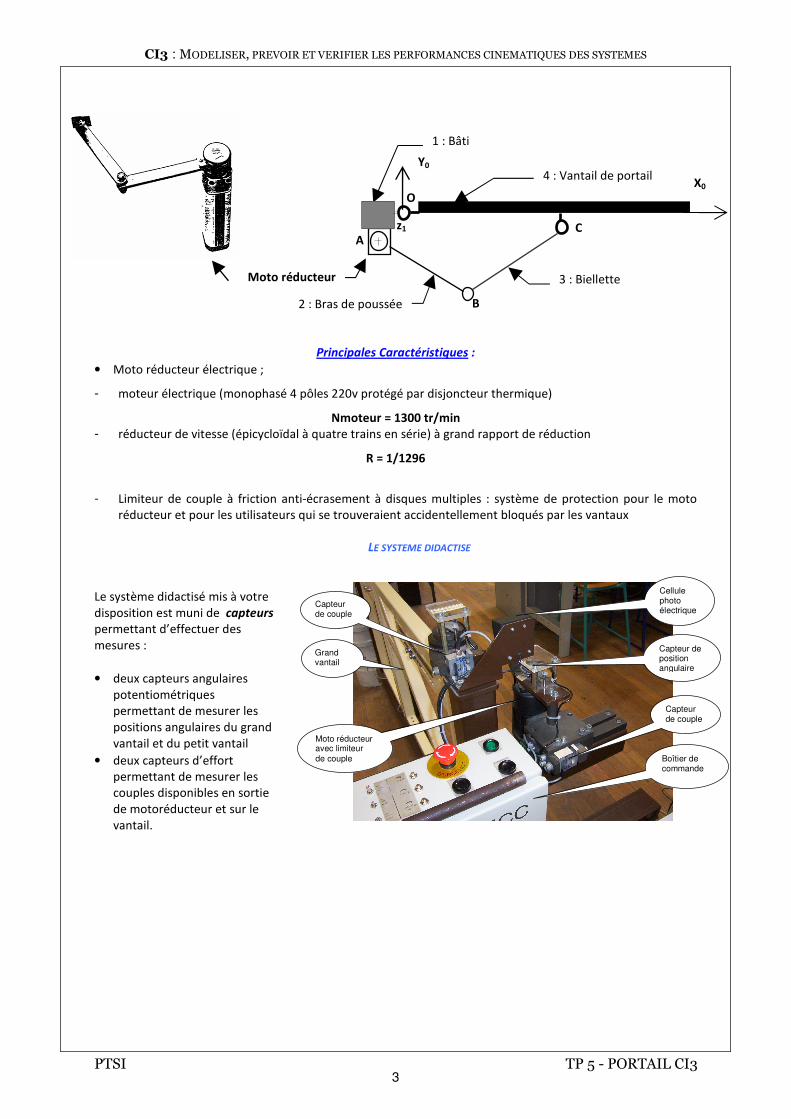
Un motoréducteur à limiteur de couple à friction est fixé au bâti 1 et transmet un mouvement de rotation
d’axe 1(A,z )�
au bras de poussée 2.
Le bras de poussée 2 est en liaison pivot d’axe 1(B,z )�
avec la biellette 3.
La biellette 3 est en liaison pivot d’axe 1(C,z )�
avec le vantail 4
Le vantail 4 est lié au bâti 1 par une liaison pivot d’axe 1(O,z )�
.
On considérera que le mouvement des pièces 2, 3, et 4 est un mouvement plan dans 1 1(x ,y )� �
.
CI3 : MODELISER, PREVOIR ET VERIFIER LES PERFORMANCES CINEMATIQUES DES SYSTEMES
PTSI TP 5 - PORTAIL CI3 3
Principales Caractéristiques :
• Moto réducteur électrique ;
- moteur électrique (monophasé 4 pôles 220v protégé par disjoncteur thermique)
Nmoteur = 1300 tr/min - réducteur de vitesse (épicycloïdal à quatre trains en série) à grand rapport de réduction
R = 1/1296
- Limiteur de couple à friction anti-écrasement à disques multiples : système de protection pour le moto réducteur et pour les utilisateurs qui se trouveraient accidentellement bloqués par les vantaux
LE SYSTEME DIDACTISE
Le système didactisé mis à votre disposition est muni de capteurs permettant d’effectuer des mesures :
• deux capteurs angulaires potentiométriques permettant de mesurer les positions angulaires du grand vantail et du petit vantail
• deux capteurs d’effort permettant de mesurer les couples disponibles en sortie de motoréducteur et sur le vantail.
Grand vantail
Moto réducteur avec limiteur
de couple Boîtier de commande
Capteur de couple
Capteur de couple
Capteur de position angulaire
Cellule photo électrique
1 : Bâti
C
O
2 : Bras de poussée
Moto réducteur
B
3 : Biellette
A
4 : Vantail de portail Y0
X0
z1
CI3 : MODELISER, PREVOIR ET VERIFIER LES PERFORMANCES CINEMATIQUES DES SYSTEMES
PTSI TP 5 - PORTAIL CI3 4
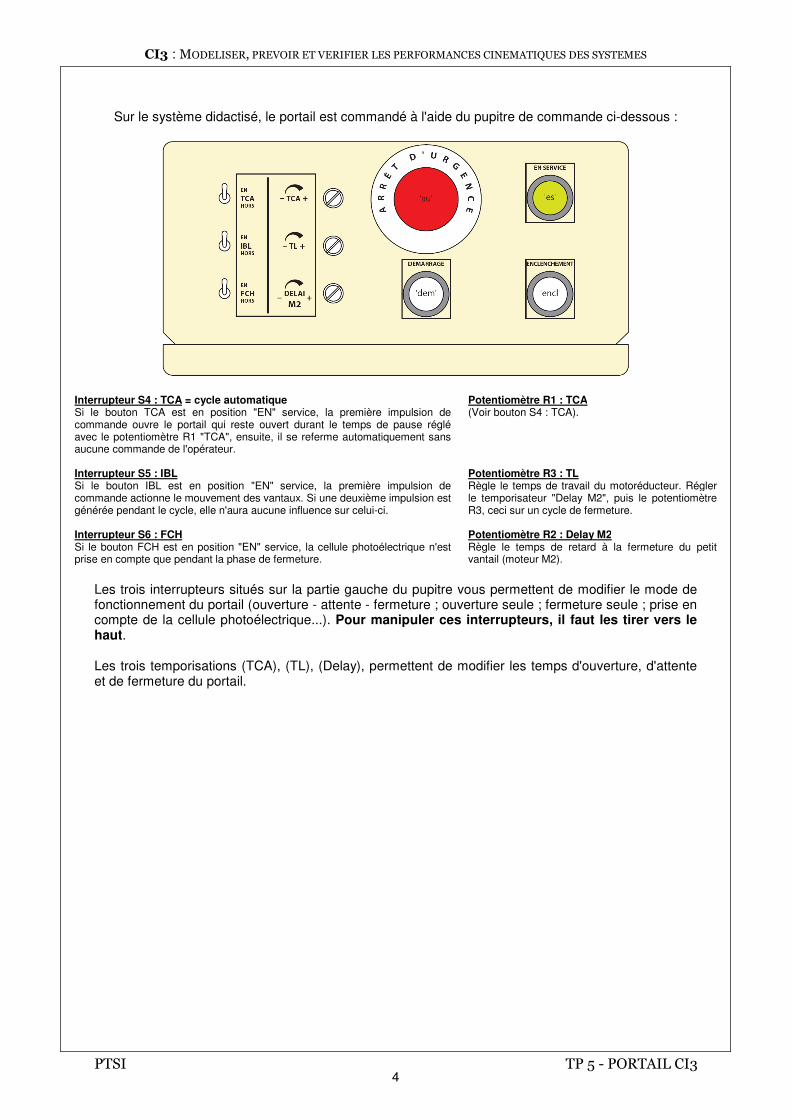
Sur le système didactisé, le portail est commandé à l'aide du pupitre de commande ci-dessous :
Interrupteur S4 : TCA = cycle automatique Si le bouton TCA est en position "EN" service, la première impulsion de commande ouvre le portail qui reste ouvert durant le temps de pause réglé avec le potentiomètre R1 "TCA", ensuite, il se referme automatiquement sans aucune commande de l'opérateur.
Potentiomètre R1 : TCA (Voir bouton S4 : TCA).
Interrupteur S5 : IBL Si le bouton IBL est en position "EN" service, la première impulsion de commande actionne le mouvement des vantaux. Si une deuxième impulsion est générée pendant le cycle, elle n'aura aucune influence sur celui-ci.
Potentiomètre R3 : TL Règle le temps de travail du motoréducteur. Régler le temporisateur "Delay M2", puis le potentiomètre R3, ceci sur un cycle de fermeture.
Interrupteur S6 : FCH Si le bouton FCH est en position "EN" service, la cellule photoélectrique n'est prise en compte que pendant la phase de fermeture.
Potentiomètre R2 : Delay M2 Règle le temps de retard à la fermeture du petit vantail (moteur M2).
Les trois interrupteurs situés sur la partie gauche du pupitre vous permettent de modifier le mode de fonctionnement du portail (ouverture - attente - fermeture ; ouverture seule ; fermeture seule ; prise en compte de la cellule photoélectrique...). Pour manipuler ces interrupteurs, il faut les tirer vers le haut. Les trois temporisations (TCA), (TL), (Delay), permettent de modifier les temps d'ouverture, d'attente et de fermeture du portail.
CI3 : MODELISER, PREVOIR ET VERIFIER LES PERFORMANCES CINEMATIQUES DES SYSTEMES
PTSI TP 5 - PORTAIL CI3 5
1. LOIS ENTREE-SORTIE THEORIQUES (TRAVAIL PREPARATOIRE IMPERATIF)
Les objectifs de cette partie sont les suivants :
Analyser le mécanisme étudié et mettre en place un modèle adapté à l’étude cinématique,
Déterminer la (les) loi(s) entrée sortie géométriques théoriques du mécanisme
MODELISATION CINEMATIQUE DU MECANISME
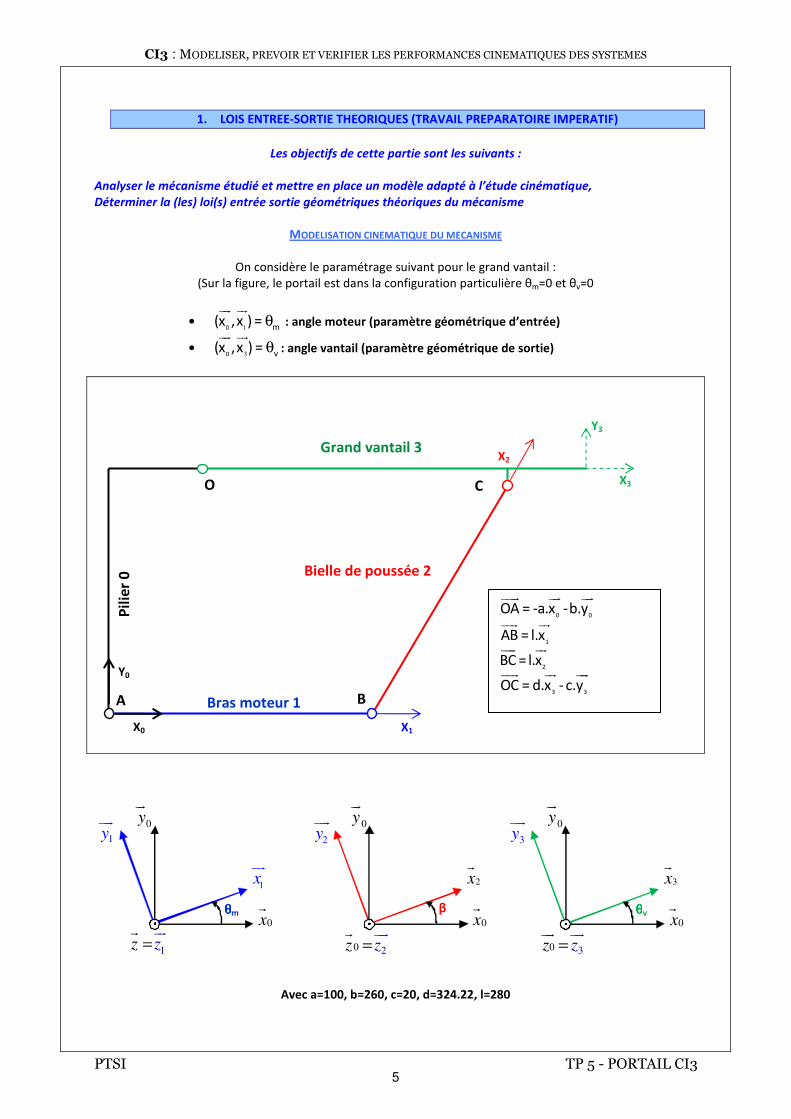
On considère le paramétrage suivant pour le grand vantail :
(Sur la figure, le portail est dans la configuration particulière θm=0 et θv=0
• 10 m(x ,x ) = θ
��� ��
: angle moteur (paramètre géométrique d’entrée)
• 30 v(x ,x ) = θ
��� ��
: angle vantail (paramètre géométrique de sortie)
Avec a=100, b=260, c=20, d=324.22, l=280
O
A B
C
X1
X2
X3
Y3
X0
Y0
C
Grand vantail 3
Bielle de poussée 2
Bras moteur 1
Pil
ier
0
0 0OA = -a.x -b.y���� ��� ���
1AB = l.x��� ��
2BC = l.x��� ��
3 3OC = d.x - c.y��� �� ���
θθθθm 0
�
x
1
��
x
0
��
y
1
���
y
1=�� �
z z
β 0
�
x
2
�
x
0
��
y
2
���
y
0 2=�� ��
zz
θθθθv 0
�
x
3
�
x
0
��
y
3
���
y
30 =�� ��� �
z z

CI3 : MODELISER, PREVOIR ET VERIFIER LES PERFORMANCES CINEMATIQUES DES SYSTEMES
PTSI TP 5 - PORTAIL CI3 6
DETERMINATION DE LA RELATION ENTREE/SORTIE
QQ11.. On souhaite établir la relation de fermeture géométrique de la chaîne fermée représentative de ce
mécanisme. Pour cela :
• Ecrire la fermeture de la boucle géométrique, c’est à dire OA + AB +BC + CO = 0���� ��� ��� ��� �
• Projeter la relation vectorielle obtenue dans la base 0 0(x ,y )� �
.
• En éliminant le paramètre angulaire β, montrer que l’on obtient une relation entrée sortie de la
forme :
( ) ( ) ( ) ( )
( ) ( )
.m m v m m v
2 2 2 2
m m
bc - ad + dl.cos θ - cl.sin θ .cos(θ ) + -bd - ac + cl.cos θ + dl.sin θ sin(θ ) =
a + b + c + d- al.cos θ -bl.sin θ
2
A partir du résultat obtenu, on ne peut pas tracer directement la relation entrée sortie ( )v mθ θ= f
Il est toutefois possible de réaliser une résolution approchée à l’aide d’un outil de calcul numérique.
Nous utiliserons pour cela le logiciel Maple
RESOLUTION NUMERIQUE
Principe de la résolution :
Pour une position du bras moteur mθ donnée, nous pouvons déterminer l’angle du vantail mθ associé par
résolution d’une équation de la forme
.m v m v mA(θ ).cos(θ ) -B(θ )sin(θ ) = C (θ )
On se propose de résoudre cette équation « pas à pas », en faisant varier la valeur du paramètre d’entrée mθ
RESOLUTION NUMERIQUE AVEC MAPLE
� Lancer Maple
� Ouvrir le fichier « ES_Portail.mws »
� Vérifier les paramètres
� Analyser l’algorithme de résolution
� Procéder à la résolution
� Récupérer le fichier de données
� Importer ces données sous Excel (ouvrir depuis Excel comme fichier .txt)
� Remplacer les points par des virgules (Ctrl+H)
� Tracer la relation ( )v mθ θ= f analytique
CI3 : MODELISER, PREVOIR ET VERIFIER LES PERFORMANCES CINEMATIQUES DES SYSTEMES
PTSI TP 5 - PORTAIL CI3 7
2. LOI ENTREE/SORTIE SIMULEE DU MECANISME
L’objectif de cette partie est le suivant :
Mettre en œuvre un logiciel d’analyse mécanique pour déterminer les relations E/S géométrique et
cinématique simulées du mécanisme étudié
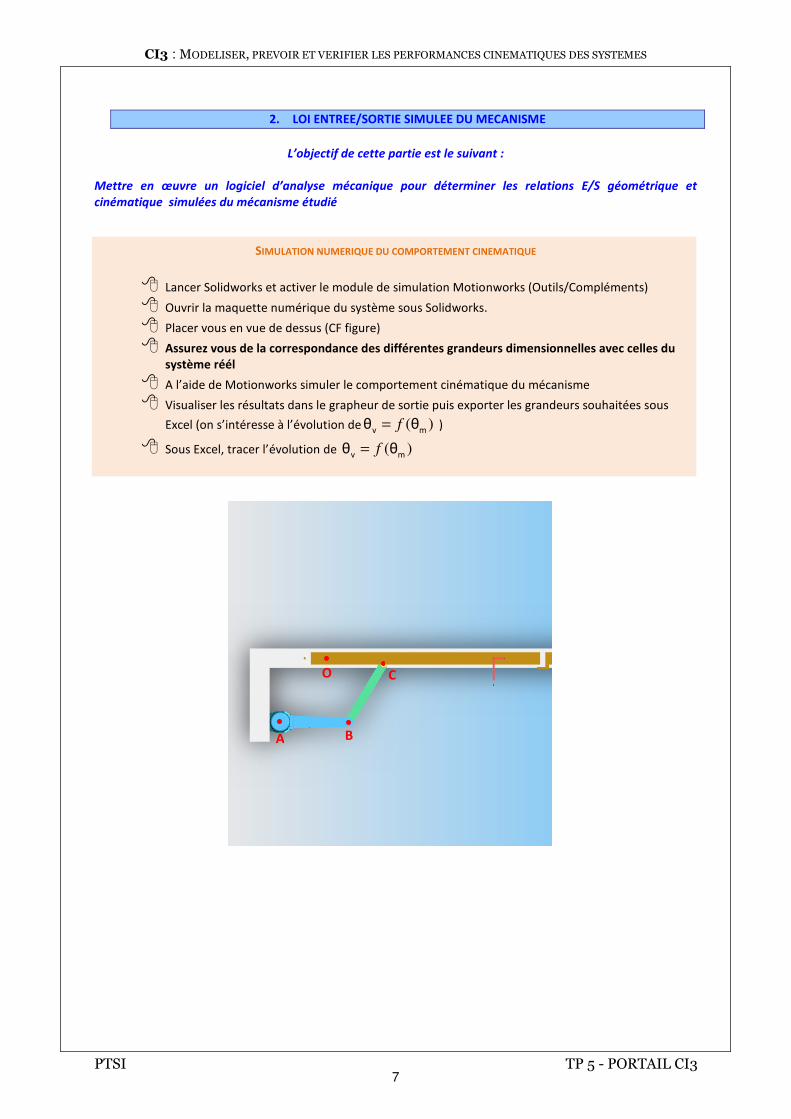
SIMULATION NUMERIQUE DU COMPORTEMENT CINEMATIQUE
� Lancer Solidworks et activer le module de simulation Motionworks (Outils/Compléments)
� Ouvrir la maquette numérique du système sous Solidworks.
� Placer vous en vue de dessus (CF figure)
� Assurez vous de la correspondance des différentes grandeurs dimensionnelles avec celles du
système réél
� A l’aide de Motionworks simuler le comportement cinématique du mécanisme
� Visualiser les résultats dans le grapheur de sortie puis exporter les grandeurs souhaitées sous
Excel (on s’intéresse à l’évolution de ( )v mθ θ= f )
� Sous Excel, tracer l’évolution de ( )v mθ θ= f
O
A B
C
CI3 : MODELISER, PREVOIR ET VERIFIER LES PERFORMANCES CINEMATIQUES DES SYSTEMES
PTSI TP 5 - PORTAIL CI3 8
3. LOI ENTREE/SORTIE EXPERIMENTALE DU MECANISME
L’objectif de cette partie est le suivant :
Déterminer expérimentalement les relations entrée sortie du mécanisme
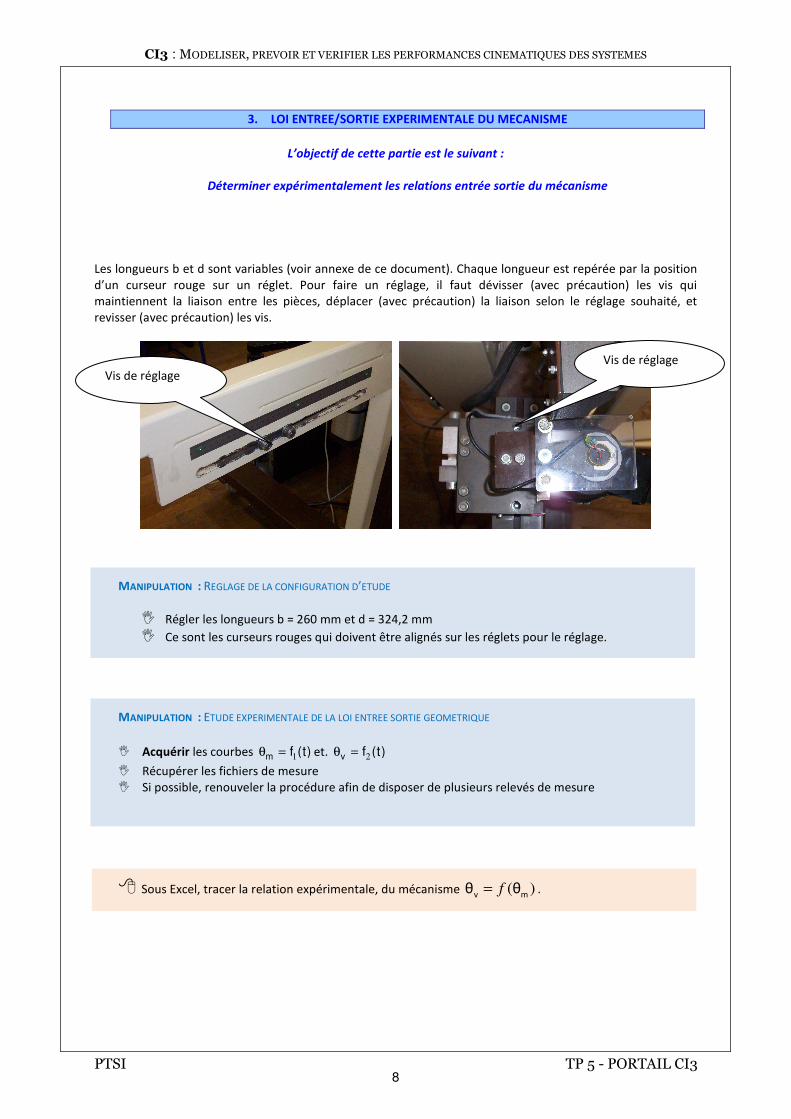
Les longueurs b et d sont variables (voir annexe de ce document). Chaque longueur est repérée par la position d’un curseur rouge sur un réglet. Pour faire un réglage, il faut dévisser (avec précaution) les vis qui maintiennent la liaison entre les pièces, déplacer (avec précaution) la liaison selon le réglage souhaité, et revisser (avec précaution) les vis.
MANIPULATION : REGLAGE DE LA CONFIGURATION D’ETUDE
� Régler les longueurs b = 260 mm et d = 324,2 mm
� Ce sont les curseurs rouges qui doivent être alignés sur les réglets pour le réglage.
MANIPULATION : ETUDE EXPERIMENTALE DE LA LOI ENTREE SORTIE GEOMETRIQUE
� Acquérir les courbes 1θ =m f (t) et.
2θ =v f (t)
� Récupérer les fichiers de mesure � Si possible, renouveler la procédure afin de disposer de plusieurs relevés de mesure
� Sous Excel, tracer la relation expérimentale, du mécanisme ( )v mθ θ= f .
Vis de réglage Vis de réglage
CI3 : MODELISER, PREVOIR ET VERIFIER LES PERFORMANCES CINEMATIQUES DES SYSTEMES
PTSI TP 5 - PORTAIL CI3 9
SYNTHESE DE L’ETUDE
� Sur un même graphique, représenter les différentes lois obtenues précédemment. Au besoin on recalera les origines afin de pouvoir comparer les courbes.
� A l’aide d’Excel, calculer en chaque point les différents écarts, en absolu et en relatif.
� Tracer les courbes d’évolution associées
QQ22.. Commentez vos résultats. Proposez une interprétation des éventuels écarts.
QQ33.. Les écarts constatés sont-ils significatifs ? Peut-on valider les modèles (théoriques/numériques) adoptés
pour l’étude