Embed Size (px)
Citation preview
République Algérienne Démocratique et PopulaireMinistère de l’Enseignement Supérieur et De la Recherche Scientifique
Email : [email protected]
Université d’ORAN Es-SeniaInstitut de Maintenance et de Sécurité Industrielle
Département : Maintenance en Instrumentation
Mémoire
Pour l’obtention du diplôme de :MAGISTER en AUTOMATIQUE
Option :Contrôle de processus industriel et de laboratoire
Thème :
Commande en réseau des systèmes retardés avec observateurlinéaire et simulation sur un moteur électrique «DC»
Présenté par :
Mr. SAYAH ABDELKADER
Soutenu le : 11 octobre 2012 devant le jury :
Mr. DELLIL AHMED Maître de conférence A IMSI-Oran Président
Mr. CHENAFA MOHAMED Maître de conférence A ENSET-Oran Encadreur
Mr. MANSOURI ABDELLAH Professeur ENSET-Oran Examinateur
Mr. HASSINI ABDELATIF Maître de conférence A IMSI-Oran Examinateur
Mr. HACHEMI KHALID Maître de conférence B IMSI-Oran Invité
Année universitaire : 2011/2012
République Algérienne Démocratique et PopulaireMinistère de l’Enseignement Supérieur et De la Recherche Scientifique
Email : [email protected]
Université d’ORAN Es-SeniaInstitut de Maintenance et de Sécurité Industrielle
Département : Maintenance en Instrumentation
Mémoire
Pour l’obtention du diplôme de :MAGISTER en AUTOMATIQUE
Option :Contrôle de processus industriel et de laboratoire
Thème :
Commande en réseau des systèmes retardés avec observateurlinéaire et simulation sur un moteur électrique «DC»
Présenté par :
Mr. SAYAH ABDELKADER
Soutenu le : 11 octobre 2012 devant le jury :
Mr. DELLIL AHMED Maître de conférence A IMSI-Oran Président
Mr. CHENAFA MOHAMED Maître de conférence A ENSET-Oran Encadreur
Mr. MANSOURI ABDELLAH Professeur ENSET-Oran Examinateur
Mr. HASSINI ABDELATIF Maître de conférence A IMSI-Oran Examinateur
Mr. HACHEMI KHALID Maître de conférence B IMSI-Oran Invité
Année universitaire : 2011/2012
République Algérienne Démocratique et PopulaireMinistère de l’Enseignement Supérieur et De la Recherche Scientifique
Email : [email protected]
Université d’ORAN Es-SeniaInstitut de Maintenance et de Sécurité Industrielle
Département : Maintenance en Instrumentation
Mémoire
Pour l’obtention du diplôme de :MAGISTER en AUTOMATIQUE
Option :Contrôle de processus industriel et de laboratoire
Thème :
Commande en réseau des systèmes retardés avec observateurlinéaire et simulation sur un moteur électrique «DC»
Présenté par :
Mr. SAYAH ABDELKADER
Soutenu le : 11 octobre 2012 devant le jury :
Mr. DELLIL AHMED Maître de conférence A IMSI-Oran Président
Mr. CHENAFA MOHAMED Maître de conférence A ENSET-Oran Encadreur
Mr. MANSOURI ABDELLAH Professeur ENSET-Oran Examinateur
Mr. HASSINI ABDELATIF Maître de conférence A IMSI-Oran Examinateur
Mr. HACHEMI KHALID Maître de conférence B IMSI-Oran Invité
Année universitaire : 2011/2012

2
Table des matières
Remerciements…..…………………………………………………………………………7
Notations………………………………………………………………………………… ..8
Introduction générale ………………………………………………………………...…...10
Chapitre I : La commande et stabilité des systèmes linéaires
I. Introduction à la théorie de la commande ………………………………………….......14
I.3. Définition des systèmes………………………………………………….…...16
I.3.2. Principe de superposition ………………………………………….16
II. La conception d'un système de commande..…………………………………………...18
II.3. Classification des systèmes à modéliser……………………………..……....19
III. Théorie de la commande……………………………………………………………...20
III.2. La commande en boucle ouverte……………………………………………21
III.3. La commande en boucle fermée ……………………………………………21
IV. Modèles mathématiques des systèmes linéaires continus…………………………….22
IV.3. Equations dynamique d’un système………………………………………...23
IV.4. Fonction de transfert d’un système linéaire.………………………………..24
IV.4.1. Réponse d’un système linéaire ……………………………..…….24
V. Le modèle interne : la représentation d’état…...………………………………………24
V.1. Le concept d’état d’un système……………………………………………...24
V.2. Représentation d’état des systèmes dynamiques……………………………25
V.3. Vecteur d’état………………………………………………………………..25
V.4.2. Représentation d’état………………………………………………26
V.5. Le modèles externes (entrées –sorties)………………………………………27
V.5.1. Matrice de transfert………………………………………………...27
VI. Commande linéaire…………………………………………………………………...28
VI.2. Formulation du problème de commande à retour d’état……………………29
VI.4. Description de performances………………………………………………..30
VI.4.1. Stabilité de la boucle fermée ...………………………………..….30
3
VI.6. Stabilité des systèmes …………………….……………………………......31
VI.6.2. La stabilité interne …………………………………………...…...32
VI.7. Stabilité et fonction de Lyapunov…………………………………………..34
VI.7.2. Stabilité asymptotique ………………………………………..…..35
VI.8. Fonction de Lyapunov.……………………………………………………...36
VI.9. Stabilité exponentielle.……………………………………………………...38
VII. Les Systèmes linéaires à retard..……………………………………………………..39
VII.4. Structure des systèmes à retards……………………………………………40
VII.4.4. Influence d'un retard pur sur la réponse impulsionelle...………...42
VII.4.5. Influence d'un retard pur sur la réponse indicielle……………….43
VIII. Conclusion...………..............................................................................................….44
Chapitre II : Observation des systèmes linéaires
I. Introduction :……………………………………………………………………………46
I.1. Commandabilité et observabilité…………………………………………..… 46
I.1.1. Commandabilité………………………………………………….…47
I.1.2. Stabilisabilité……………………………………………………..…48
I.1.3. Observabilité………………………………………………………...48
I.1.4. Détectabilité…………………………………………………………50
II. Observateur d'état……………………………………………………………………...50
II.1. Architecture d'un observateur………………………………………………..51
II.2. Observateur d’état et principe de séparation…………………………………51
II.2.1. Observateur de Luenberger – Kalman…………………………..…51
III. Commande à base d’observateur……………………………………………………...53
III.1.Observateurs des systèmes linéaires : ……………………………………….55
III.1.1. Modèle analytique ………………………………………………...55
III.2. Observateur asymptotique…………………………………………………..57
III.3. Observateur de Luenberger…………………………………………………57
III.4. Observateur de Kalman …………………………………………………….58
IV. Commande par retour d'état reconstruit par un observateur de Kalman……………...59
IV .1. Filtre de Kalman…………………………………………..………………..61
IV.2. Conception du filtre de KALMAN (FK)……………………………………62
4
V. Observation des systèmes à retards……………………………………………………62
V.2. Observation de systèmes à retards connus…………………………………...63
V.3. Retard connu sur l'état et la sortie…….…………...…………………………63
VI. Conclusion.…………………………………………………………………………..64
Chapitre III : La commande des systèmes non linéaires
I. Introduction..…………………………….…………………………………………….66I.1. Pourquoi la commande non linéaire .................................................................66
I.2. Qu’est-ce qu’un système non linéaire commandé…………………………….67
II. Introduction a la Commande Non-Linéaire……………………………………………68
II.1. Commandes non linéaires……………………………………………………69
II.2. Systèmes non linéaires.………………………………………………………70
II.3. Multiplicité de la représentation d'état...……………………………………..70
II.4. Introduction aux systèmes dynamiques……………………………………...72
II.4.1. Point d’équilibre.…………………………………………………...72
III. Stabilité des systèmes dynamiques : Stabilité de Lyapunov………………………….73
III.1. stabilité des systèmes à temps continu……………………………………...73
III.2. Méthode directe de Lyapunov………………………………………………76
IV. Stabilité des systèmes à retard………………………………………………………..77
IV .2. Modèles de retards…………………………………………………………79
IV.4. Stabilité des systèmes à retards par la seconde méthode de Lyapunov……..82
IV.4.2. Approche par fonctions de Razumikhin……………………………83
IV.4.3. Approche par fonctionnelles de Krasovskii………………………..84
V. Stabilité exponentielle des systèmes linéaires…………………………………………86
V.1. Cas des retards constants…………………………………………………….87
V.1.1. Première technique : Théorie de Lyapunov et comparaison……….87
V.1.2. Deuxième technique : Méthode du changement de variable………88
VI. Conclusion ..……………………………………………………………………. ……92
Chapitre IV : Observateurs non linéaires
I. Observateurs non linéaires……………………………………………………………...94
I.2. Linéarisation par injection de sortie…………………………………………..95
5
II. Conception d’observateur non linéaire………………………………………………...97
II.1. Définition (Observateur) …………………………………………………….98
II.2. les différents types ’observateurs : état de l’art……………………………...99
III. Observateurs étendus………………………………………………………………...100
III.1. Observateurs de Luenberger étendus……………………………………....100
III.2. Filtre de Kalman étendu (EKF)…………………………………………....101
III.3. Techniques de linéarisation exacte………………………………………...102
III.4. Observateurs à grand gain………………………………………………...104
III.5 Théorème 1 : (Thau)………………………………………………………..105
IV. Modélisation des systèmes non linéaires, non stationnaires à retards………………106
V. Conclusion…………………………………………………………………………....106
Chapitre V : systèmes commandés en réseau
I. Application a la commande en réseau ……….………………………………..………108
I.2. Les systèmes contrôlés en réseau……………………………………………109
I.3. Introduction au Réseaux……………………………………………………..111
I.3.2. Niveaux de planification et d’exécution…………………………...111
I.4. Réseau de communication………...…………………………………………111
I.4.2. Réseaux locaux: Ethernet …………………………………………112
I.4.3. Réseaux longue distance : Protocole detransfert………………......112
I.4.5 TCP/IP……………………………………………………………...114
II. Problématiques :………………………………………………………………….......115
II.1. Objectif de la commande…………………………………………………...115
II.2. Hypothèses sur les retards, protocole et synchronisation GPS……………..117
II.3. Prise en compte de l'échantillonnage……………………………………….118
II.5. Conception de la commande à travers réseau internet……………………...121
II.5.2. Loi de commande…………………………………………….…...123
II.5.3. Transmission de la commande……………………………………124
II.5.4. Réception et traitement des données de commande………..……..124
II.5.6. Transmission de la sortie capteur…………………………………124
II.6. Observation du processus…………………………………………………..125
III. Conception des gains du contrôleur et de l’observateur :……...……………………126
III.1. Conception du gain de l’observateur………………………………………133
III.2. Conception de la loi de commande………………………………………..134

6
IV. Stabilité globale du système commandé en réseau………………………………….137
V. Application sur un Moteur électrique DC……………………………………………139
V.1 Introduction au logiciel MATLAB …………………………………………139
V.2. Simulation avec la boite à outils Simulink ………………………………...140
V.3. simulation d’un système dynamique linéaire (Moteur DC) ……………….141
V.4. Modélisation ……………………………………………………………….142
V.4.1 Model d’état ………………………………………………………145
V.5. Simulation ………………………………………………………………….146
V.5.1 Calcule du gain L de l’observateur ……………………………….146
V.5.2 Calcule du gain K de la commande……………………………….148
V.5.3 modélisation du retard…………………………………………….149
V.6 Simulation du système sans retard introduit dans la commande observée…150
V.7 Simulation du système avec retard introduit dans la commande observée…155
V.8. Simulation avec la technique placement de pole…………………………..158
Conclusion Générale...…...……………………………………………………………...161
Annexe I LMI..……………………………………………………………164
Annexe II ………………………………………………………………… 169
Liste des figures…..………………………………………………………..177
Bibliographie………………………………………………………………179
7
Remerciements
Je remercie Dieu le tout puissant pour la santé, la volonté, la patience etl’aide qu’il nous a données
Le travail que j’ai présenté dans ce mémoire a été réalisé sous la directiondu Dr. CHENAFA MOHAMED maitre de conférence classe A à l’ENSET-ORAN.Je tiens à le remercier beaucoup pour son encadrement, sa disponibilité et conseilsqui ma permis de progresser dans ce mémoire et d'achever ce travail.
Je tiens à remercier très vivement Mr DELLIL AHMED Maitre deconférence classe A à l’IMSI-ORAN, d’avoir bien voulu présidé ma séance desoutenance.
Je tiens aussi à exprimer toute ma reconnaissance à Mr MANSOURIABDELLAH professeur à l’ENSET-ORAN pour avoir accepté d’examiner montravail et de me faire profiter de ses réflexions.
Je remercier également Mr HASSINI ABDELATIF maitre de conférenceclasse A de l’IMSI-ORAN qui à bien voulu examiner ce modeste travail.
Comme je tiens à remercier Mr HACHEMI KHALID maitre de conférencede l’IMSI-ORAN pour participés avec son enthousiasme, et ses judicieux conseils.
Je suis très honoré par Mr BOUDJANI AHMED (ex maitre de conférencesà l’IMSI-ORAN) qui a assuré l’environnement pendant ces années de formation.
J'aimerai exprimer aussi toute ma gratitude envers tous mes amis pour leurssympathies.
Je souhaite aussi dire un grand merci à tous mes amis de la SCiS, pourleurs soutiens.
Je terminerai cet avant-propos en remerciant chaleureusement ma famillepour leurs aides, pour leurs persévérances et leurs patiences, particulièrement mamère et ma femme Je voulais aussi remercier la petit NOUR ELHOUDA pour sonchaleureux sourire. Comme je tien à remercier la famille NAIMI pour leur aide etsurtout AZZEDINE.
8
Notations et acronymes
Ensembles :
R: Ensemble des nombres réels
C: Ensemble des nombres complexes
R+ : Ensemble des nombres réels positifs
N : Ensemble des entiers naturels
N+ : Ensemble des entiers naturels non nuls
Rs : Espace réel euclidien de dimension s
Rr×s : Ensemble des matrices réelles de dimension r×s
Rn : espace vectoriel de dimension n construit sur le corps des réels.
τ(t) : retard variable de l’échantillonnage
α : paramètre de stabilité exponentielle
δ : retard sur la boucle du réseau
μ : retard
ssi : si et seulement si
Matrices et normes
A < B (resp. A > B) : signifie que A-B est une matrice définie négative (resp.
définie positive).
Is (I) : Matrice identité de dimension s
MT : Transposée de la matrice M
M−1 : Inverse de la matrice M
x = [x1 ; ; ; ; ; xn] Є Rn : vecteur d'état instantané
[aij ] : matrice dont le coefficient de la iéme ligne et jéme colonne est aij
9
Acronymes
LMI : Inégalité matricielle linéaire (Linear Matrix Inequality)
LTI : Linéaire à Temps Invariant
LTV : Linéaire à temps variants
SISO: Entrée simple sortie simple (Single Input Single Output)
MIMO : Entrée multiple sortie multiple (Multiple Input Multiple Output).
OL : Observateur de Luenberger
KF : Filtre de Kalman (Kalman Filter)
EKF : Filtre de Kalman étendu (Extended Kalman Filter)
OLG: Observateur de Luenberger généralisé
Moteur DC : Moteur à courant continu
TCP : Transfer Control Protocol
UDP : User Datagram Protocol
RTT: Round Trip Time.
CAN : Controller Area Network
LAN: Local Area Networks
WAN: (Wide Area Network)
GPS: Global Positioning System
Introduction Générale
10
Introduction Générale
Les mécanismes de régulation et d’adaptation sont largement répandus dans la
nature. Derrière ces deux mécanismes se retrouvent la commandabilité et l’observabilité.
Ces mécanismes sont présents déjà chez les vivants afin d’assurer le maintien de certaines
variables essentielles comme le taux de sucre, la régulation de température, la sécrétion
hormonale... En ingénierie également les mécanismes d’asservissement et de réglage ont
une longue histoire. La plus part des développements se faisaient dans le cadre des
systèmes linéaires.
Dans la commande des systèmes linéaires, il faut déterminer les propriétés du
système et appliquer les méthodes de la théorie des systèmes linéaires pour résoudre des
problèmes simples.
De nombreuses méthodes de commande des processus utilisent le principe du
retour d’état :(commande optimale, découplage, placement de pôles…). Dans la plupart
des cas, les seules grandeurs accessibles du système sont les variables d’entrée et de
sortie, il est nécessaire, à partir de ces informations, de reconstruire l’état du modèle
choisi pour élaborer la commande.
En comparaison avec la variété des techniques disponibles dans la théorie des
systèmes linéaires, les outils pour l'analyse et la conception des systèmes non-linéaires
sont limités à quelques méthodes [2].
L’analyse des problèmes d’ingénieries des systèmes non-linéaires impose en
premier lieux de les linéarisés, donc évité les aspects non-linéaires du problème.
Un Estimateur est définie comme un système dynamique où ses grandeurs d’état
sont des estimations des variables d’état d’un autre système, il existe souvent deux façons
de réaliser un estimateur: en boucle ouverte ou en boucle fermée, la différence entre les
deux est basée sur l’existence, ou non d’un terme de correction lié a l’erreur d’estimation,
un estimateur en boucle fermée est connu sous le nom d’Observateur [48].
Introduction Générale
11
L’observation et l’identification des systèmes non-linéaires est donc un problème
majeur qui est en voie de trouver des solutions générales, La dernière décennie a été
consacrée à l’introduction des techniques de construction d’observateur par linéarisation
et injection de sortie, les techniques grands gains, les observateurs par modes
glissants[26].
Dans ce cadre des observateurs ont été conçus pour des systèmes complexes,
citons comme exemple d’application: Les modèles de réacteurs chimiques et biologiques,
colonnes à distiller, machines électriques et robots. Certains observateurs ont été utilisés
dans des applications industrielles pour la commande et la supervision des procédés.
Ce mémoire, est basé sur l'analyse des problèmes qui apparait dans la commande à
distance a travers le réseau de communications « internet » entre différent agents maitre et
esclave. Les principales difficultés est l'existence des retards introduits par la transmission
des lois de commande dans le réseau et de l’échantillonnage des informations circulants
entre maitre et esclave.
Le réseau de communication génère des perturbations sur le système à commander
en termes de retard, de pertes de données… qui doivent être prises en compte dans la
boucle de régulation du système asservi, puisque le transfert informatique des données
(capteurs ou commande) par le réseau nécessite un échantillonnage des sorties capteurs et
des commandes générées.
En général lorsque la taille des retards devient significative au regard des
performances temporelles du système (dynamique en boucle ouverte ou fermée) il n'est
plus possible de les ignorer.
L’application des outils d'analyse et de synthèse de lois de commande pour le
calcule du gain de la commande K et de l’observateur L, est effectué avec des techniques
de résolutions LMI (Linear Matrix Inequality : en anglais) à fin de stabilisé le système à
commandé même avec des retards qui perturbent le système.
La simulation est réalisé dans le logiciel Matlab « Simulink » où l’esclave est
représenté par un moteur électrique « DC » qui est supposé comme système linéaire.
Introduction Générale
12
L'analyse et la stabilité de ces systèmes peuvent être menées à l'aide des
techniques issues de la seconde méthode de Lyapunov.
Il s'agit principalement de :
Calculer des lois de commande stabilisante garantissant certaines caractéristiques :
(bornes de retards admissibles, performances en stabilité…).
Déduire également des techniques de reconstruction d'état (avec le même type de
caractéristiques).
Le contrôle à travers le réseau est une solution de réaliser sans risque des taches
dans un environnement difficile tout en préservant les performances des systèmes à
commandés.
Le travail est organisé comme suit :
- Le Premier chapitre est un rappel introductif sur les systèmes linéaires et leurs
développement dans la théorie de commande : identification, analyse et conception de lois
de commande pour finir avec la stabilité et un aperçu sur les retards des systèmes
linéaires.
- Le Deuxième chapitre traite la Commandabilité et l’observabilité des systèmes
linéaires plus la commande basée sur observateurs avec conception d’Observateur
de Luenberger pour les systèmes linéaires.
- Le Troisième chapitre présente le contexte de commande des systèmes non
linéaires. Leur apparition fréquente dans la modélisation des phénomènes physiques. Plus
la Stabilité des systèmes à retards par la seconde méthode de Lyapunov.
- Dans le Quatrième chapitre, on procède à l'étude des différents types
d’observateurs tel que : le Filtre de Kalman étendu (FKE), les Techniques de linéarisation
exacte, l’Observateur à grand gain.
Introduction Générale
13
- Le Cinquième chapitre présente quelques problèmes expérimentaux pour
lesquels les résultats théoriques présentés tout au long de ce mémoire trouvent finalement
leur justification sur la commande a travers le réseau internet avec application des
protocoles de communication.
En effet nous nous pencherons particulièrement sur la commande à travers le
réseau internet en étudiant ces problèmes induits comme retard variable, perte de données
et la congestion du réseaux plus le choix des protocoles de communications qui facilite le
transfert sécurisé de la commande vers le système linéaire appliqué. L’observateur
linéaire de type LUENBERGER appliqué sert à estimé l’état du système à fin de prouver
une convergence exponentielle avec un degré de convergence α qui rend le système
α-stable.
Chapitre : I La Commande et la stabilité des systèmes linéaires
14
Chapitre I
La Commande et la StabilitéDes Systèmes Linéaires
I. Introduction à la théorie de la commande
I.1. Préface
L’objet de cette étude est l’analyse, la synthèse et la réalisation des systèmes de
commande.
Il s’agit bien de la théorie de commande fondée sur la notion centrale de contre-
réaction (feedback) soit une théorie de la régulation.
Si les systèmes de commande a contre-réaction sont connus depuis l’Antiquité, le
XIXème siècle pour les débuts industriels et le XXème pour la conception théorique ont
réellement utilisé l’idée fondamentale de cette structure de commande.
Cela montre à que l’automatique n’est pas un champ scientifique fermé.
Ce champ peut aller de la régulation de l’économie à celle de la machine électrique
en passant par le pilotage des lanceurs, l’asservissement des têtes de lecture dans les
disques durs ...
I.2. Bref historique chronologique [1] :
L’histoire et le développement de la théorie de la commande et des systèmes de
commande à contre-réaction sont brièvement cités.
- 300 avant J.C. : La première mise en œuvre de système de commande à contre
réaction est l’œuvre des grecs dans l’antiquité avec des régulations de niveau par flotteur
afin de mesurer précisément le temps.
- 800 - 1200 : différents ingénieurs Arabes (Al-Jazari, les trois frères Musa et Ibn
al-saati) utilisent des régulateurs à flotteur pour des horloges à eau et autres
applications[1].
Chapitre : I La Commande et la stabilité des systèmes linéaires
15
Durant cette période, le principe de la commande tout ou rien est pour la première
fois utilisé. Al-Jazari en particulier dans son livre « The book of knowledge of ingenious
mechanical devices » connu sous le titre abrégé : « Automata » propose de nombreux
mécanismes automatiques (pompes à eau, clepsydres, régulateurs de flammes, distributeurs
automatiques de liquides...) [1].
- 1600 - 1900 : la révolution industrielle débute réellement avec l’avènement des
procédés de commande à contre-réaction. En effet, l’invention de nouveaux mécanismes
(moulins à grains avancés, fours, machine à vapeur) nécessitent des systèmes de
commande perfectionnés allant au-delà de la régulation manuelle.
- Régulation de température (Drebbel-1624, Becher-1680, Réaumur-1754, Henry-
1771, Bonnemain-1777) : Cornelius Drebbel, alchimiste hollandais du XVIIème siècle est
le premier à inventer le thermostat en 1624 qu’il souhaite utiliser dans les fours pour la
transmutation du plomb en or.
- Régulation des moulins à vent : le flux de grain dans un moulin est régulé suivant
la vitesse de rotation de la meule en 1588 (par le mill-hoper). En 1745, Lee invente une
petite roue à vent (vantail) montée perpendiculairement à l’axe de rotation afin d’orienter
la voilure des moulins dans le sens du vent.
Figure : I.1. Machine à vent doté d’un vantail
- 1800-1935 : dans cette période préclassique de la théorie de la commande on peut
parler de mathématisation de la théorie de la régulation.
Les premiers qui ont proposés des conditions de stabilité pour les systèmes régulés
représentés par des équations différentielles sont J.C. Maxwell et le russe
I.I.Vyshnegradsky qui analysent la stabilité du régulateur à boules de Watt [1].
Chapitre : I La Commande et la stabilité des systèmes linéaires
16
- 1980 : l’introduction des capacités de calcul étendues et l’extension des logiciels
de simulation et d’assistance à la conception c’est traduite par la réunification des théories
classique et moderne et par l’émergence du problème spécifique de la commande robuste.
Tous ces développements se faisaient dans le cadre des systèmes linéaires avec une
seule commande et une seule sortie : on disposait d’une mesure sous la forme d’un signal
électrique. Cette dernière était alors entrée dans un amplificateur (un circuit électrique) qui
restituait en sortie un autre signal électrique que l’on utilisait alors comme signal de
contrôle.
Ce n’est qu’après les années 50 que les développements théoriques et
technologiques (calculateurs numériques) permirent le traitement des systèmes multi-
variables linéaires et non linéaires avec plusieurs entrées et plusieurs sorties [5].
Comme on peut citer les contributions importantes dans les années 60 : Richard
Bellmann avec la programmation dynamique, Rudolf Kalman avec le filtrage et la
commande linéaire quadratique et celles de L. Pontryagin avec la commande optimale. Ces
contributions continuent encore aujourd’hui à alimenter les recherches en théorie des
systèmes [5].
I.3. Définition des systèmes :
I.3.1. Les systèmes linéaires :
Un système est dit linéaire si la réponse de ce système à une combinaison linéaire
de signaux d'entrée est égale à la combinaison linéaire des réponses :
I.3.2. Principe de superposition
Définition 1 :
Soit deux signaux d’entrées u et v engendrant deux signaux de sorties y1 et y2. La
réponse à la somme des entrées est la somme des réponses individuelles.
Si on applique en entrée : )()()( 21 tvxtuxtx +=
On obtiendra en sortie : )()()( 21 tvytuyty +=Cette propriété des systèmes linéaires est aussi appelée principe de superposition.
Chapitre : I La Commande et la stabilité des systèmes linéaires
17
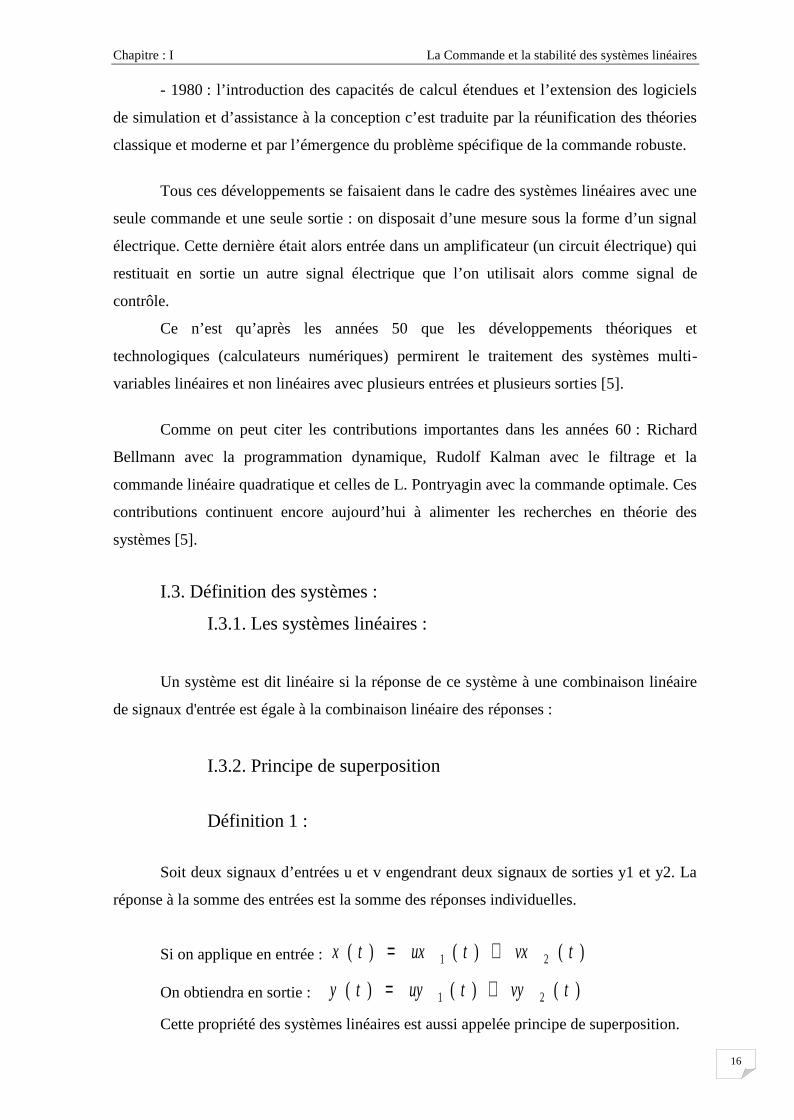
Figure : I.2. Système linéaire
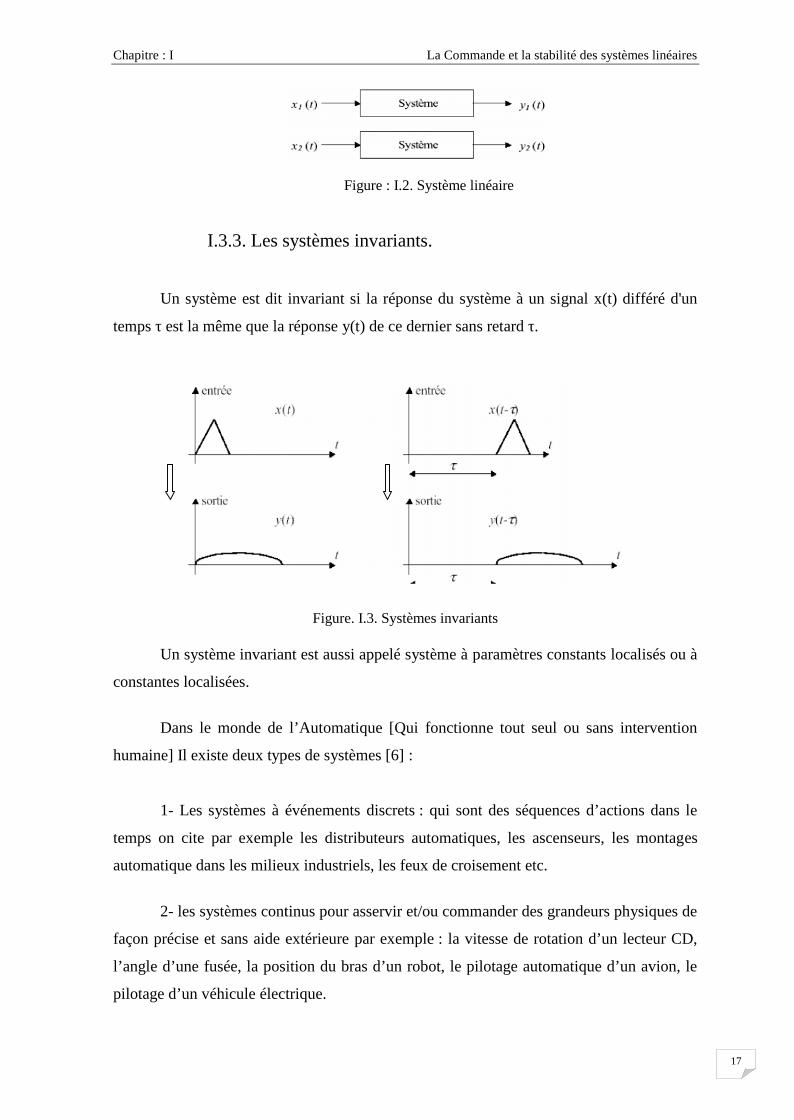
I.3.3. Les systèmes invariants.
Un système est dit invariant si la réponse du système à un signal x(t) différé d'un
temps τ est la même que la réponse y(t) de ce dernier sans retard τ.
Figure. I.3. Systèmes invariants
Un système invariant est aussi appelé système à paramètres constants localisés ou à
constantes localisées.
Dans le monde de l’Automatique [Qui fonctionne tout seul ou sans intervention
humaine] Il existe deux types de systèmes [6] :
1- Les systèmes à événements discrets : qui sont des séquences d’actions dans le
temps on cite par exemple les distributeurs automatiques, les ascenseurs, les montages
automatique dans les milieux industriels, les feux de croisement etc.
2- les systèmes continus pour asservir et/ou commander des grandeurs physiques de
façon précise et sans aide extérieure par exemple : la vitesse de rotation d’un lecteur CD,
l’angle d’une fusée, la position du bras d’un robot, le pilotage automatique d’un avion, le
pilotage d’un véhicule électrique.
Chapitre : I La Commande et la stabilité des systèmes linéaires
17
Figure : I.2. Système linéaire
I.3.3. Les systèmes invariants.
Un système est dit invariant si la réponse du système à un signal x(t) différé d'un
temps τ est la même que la réponse y(t) de ce dernier sans retard τ.
Figure. I.3. Systèmes invariants
Un système invariant est aussi appelé système à paramètres constants localisés ou à
constantes localisées.
Dans le monde de l’Automatique [Qui fonctionne tout seul ou sans intervention
humaine] Il existe deux types de systèmes [6] :
1- Les systèmes à événements discrets : qui sont des séquences d’actions dans le
temps on cite par exemple les distributeurs automatiques, les ascenseurs, les montages
automatique dans les milieux industriels, les feux de croisement etc.
2- les systèmes continus pour asservir et/ou commander des grandeurs physiques de
façon précise et sans aide extérieure par exemple : la vitesse de rotation d’un lecteur CD,
l’angle d’une fusée, la position du bras d’un robot, le pilotage automatique d’un avion, le
pilotage d’un véhicule électrique.
Chapitre : I La Commande et la stabilité des systèmes linéaires
17
Figure : I.2. Système linéaire
I.3.3. Les systèmes invariants.
Un système est dit invariant si la réponse du système à un signal x(t) différé d'un
temps τ est la même que la réponse y(t) de ce dernier sans retard τ.
Figure. I.3. Systèmes invariants
Un système invariant est aussi appelé système à paramètres constants localisés ou à
constantes localisées.
Dans le monde de l’Automatique [Qui fonctionne tout seul ou sans intervention
humaine] Il existe deux types de systèmes [6] :
1- Les systèmes à événements discrets : qui sont des séquences d’actions dans le
temps on cite par exemple les distributeurs automatiques, les ascenseurs, les montages
automatique dans les milieux industriels, les feux de croisement etc.
2- les systèmes continus pour asservir et/ou commander des grandeurs physiques de
façon précise et sans aide extérieure par exemple : la vitesse de rotation d’un lecteur CD,
l’angle d’une fusée, la position du bras d’un robot, le pilotage automatique d’un avion, le
pilotage d’un véhicule électrique.
Chapitre : I La Commande et la stabilité des systèmes linéaires
18
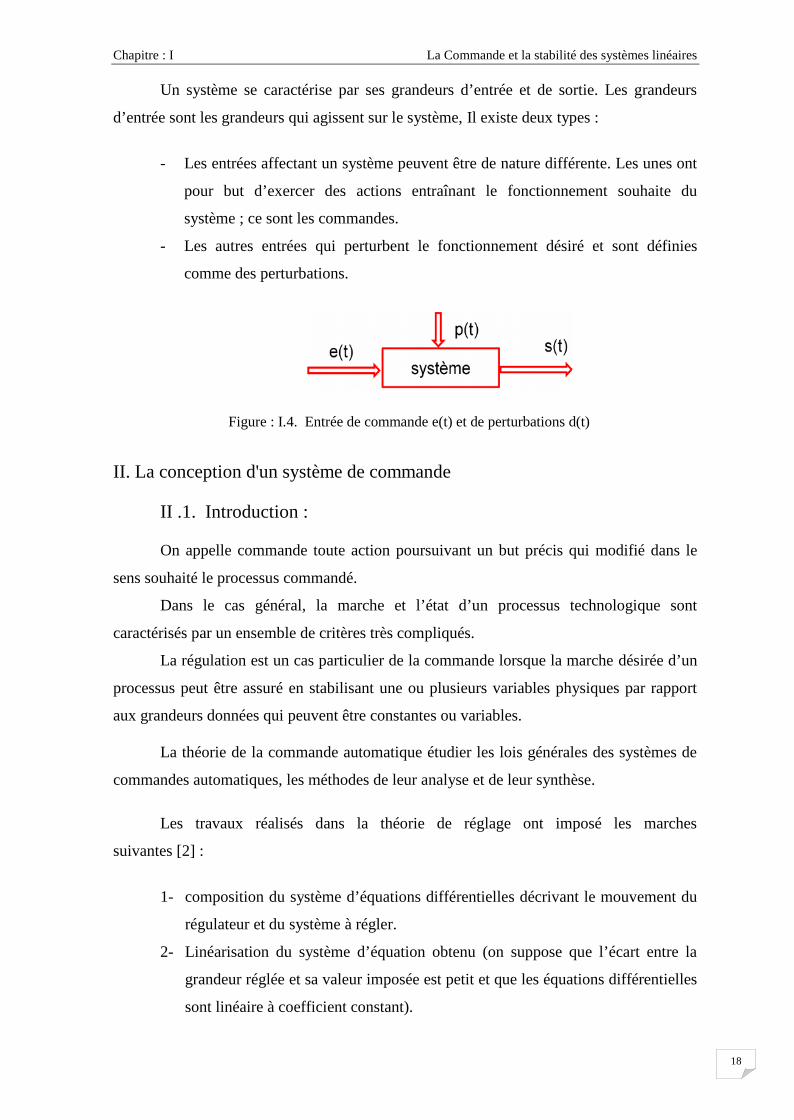
Un système se caractérise par ses grandeurs d’entrée et de sortie. Les grandeurs
d’entrée sont les grandeurs qui agissent sur le système, Il existe deux types :
- Les entrées affectant un système peuvent être de nature différente. Les unes ont
pour but d’exercer des actions entraînant le fonctionnement souhaite du
système ; ce sont les commandes.
- Les autres entrées qui perturbent le fonctionnement désiré et sont définies
comme des perturbations.
Figure : I.4. Entrée de commande e(t) et de perturbations d(t)
II. La conception d'un système de commande
II .1. Introduction :
On appelle commande toute action poursuivant un but précis qui modifié dans le
sens souhaité le processus commandé.
Dans le cas général, la marche et l’état d’un processus technologique sont
caractérisés par un ensemble de critères très compliqués.
La régulation est un cas particulier de la commande lorsque la marche désirée d’un
processus peut être assuré en stabilisant une ou plusieurs variables physiques par rapport
aux grandeurs données qui peuvent être constantes ou variables.
La théorie de la commande automatique étudier les lois générales des systèmes de
commandes automatiques, les méthodes de leur analyse et de leur synthèse.
Les travaux réalisés dans la théorie de réglage ont imposé les marches
suivantes [2] :
1- composition du système d’équations différentielles décrivant le mouvement du
régulateur et du système à régler.
2- Linéarisation du système d’équation obtenu (on suppose que l’écart entre la
grandeur réglée et sa valeur imposée est petit et que les équations différentielles
sont linéaire à coefficient constant).
Chapitre : I La Commande et la stabilité des systèmes linéaires
18
Un système se caractérise par ses grandeurs d’entrée et de sortie. Les grandeurs
d’entrée sont les grandeurs qui agissent sur le système, Il existe deux types :
- Les entrées affectant un système peuvent être de nature différente. Les unes ont
pour but d’exercer des actions entraînant le fonctionnement souhaite du
système ; ce sont les commandes.
- Les autres entrées qui perturbent le fonctionnement désiré et sont définies
comme des perturbations.
Figure : I.4. Entrée de commande e(t) et de perturbations d(t)
II. La conception d'un système de commande
II .1. Introduction :
On appelle commande toute action poursuivant un but précis qui modifié dans le
sens souhaité le processus commandé.
Dans le cas général, la marche et l’état d’un processus technologique sont
caractérisés par un ensemble de critères très compliqués.
La régulation est un cas particulier de la commande lorsque la marche désirée d’un
processus peut être assuré en stabilisant une ou plusieurs variables physiques par rapport
aux grandeurs données qui peuvent être constantes ou variables.
La théorie de la commande automatique étudier les lois générales des systèmes de
commandes automatiques, les méthodes de leur analyse et de leur synthèse.
Les travaux réalisés dans la théorie de réglage ont imposé les marches
suivantes [2] :
1- composition du système d’équations différentielles décrivant le mouvement du
régulateur et du système à régler.
2- Linéarisation du système d’équation obtenu (on suppose que l’écart entre la
grandeur réglée et sa valeur imposée est petit et que les équations différentielles
sont linéaire à coefficient constant).
Chapitre : I La Commande et la stabilité des systèmes linéaires
18
Un système se caractérise par ses grandeurs d’entrée et de sortie. Les grandeurs
d’entrée sont les grandeurs qui agissent sur le système, Il existe deux types :
- Les entrées affectant un système peuvent être de nature différente. Les unes ont
pour but d’exercer des actions entraînant le fonctionnement souhaite du
système ; ce sont les commandes.
- Les autres entrées qui perturbent le fonctionnement désiré et sont définies
comme des perturbations.
Figure : I.4. Entrée de commande e(t) et de perturbations d(t)
II. La conception d'un système de commande
II .1. Introduction :
On appelle commande toute action poursuivant un but précis qui modifié dans le
sens souhaité le processus commandé.
Dans le cas général, la marche et l’état d’un processus technologique sont
caractérisés par un ensemble de critères très compliqués.
La régulation est un cas particulier de la commande lorsque la marche désirée d’un
processus peut être assuré en stabilisant une ou plusieurs variables physiques par rapport
aux grandeurs données qui peuvent être constantes ou variables.
La théorie de la commande automatique étudier les lois générales des systèmes de
commandes automatiques, les méthodes de leur analyse et de leur synthèse.
Les travaux réalisés dans la théorie de réglage ont imposé les marches
suivantes [2] :
1- composition du système d’équations différentielles décrivant le mouvement du
régulateur et du système à régler.
2- Linéarisation du système d’équation obtenu (on suppose que l’écart entre la
grandeur réglée et sa valeur imposée est petit et que les équations différentielles
sont linéaire à coefficient constant).
Chapitre : I La Commande et la stabilité des systèmes linéaires
19
En plus de la théorie de réglage linéaire de Joukovski (1909) la publication de
Lyapunov en (1892) [7] est consacrée à la théorie de la stabilité et elle est devenue la base
de la théorie de la commande automatique. Il a été le premier à donner un énoncé de la
notion de stabilité des systèmes linéaires et non linéaires [7].
La conception d'un système de commande pourrait se faire par la construction d’un
contrôleur, en l’installant sur le système à commander et avec des essais et modifications
continue sur le contrôleur jusqu'à ce qu’il soit satisfaisant dans ses performances.
Cette approche a pu être peu économique, c’est dans ce but qu’il est plus
raisonnable de faire une approche à la conception de système de commande par emploie
des modèles mathématiques.
Le modèle est une traduction mathématique du comportement du système, lorsqu’il
est influencé par des variables d'entrée ou par des conditions initiales.
La forme finale du modèle mathématique dépend du type de système physique, et la
méthode employée qu’a développez ce dernier.
II.2. Motivation
L’écriture des modèles demande une compréhension en détail des mécanismes et
utilise les lois de la Physique.
Les Modèles obtenus de cette façon sont dits modèles de connaissance. Ils font
intervenir des paramètres physiques qui, par définition, sont mesurables par des
expériences.
Par exemple, un système mécanique rigide se paramétré en termes de masses, de
longueurs, d’inerties.
Dans l’application de ces modèles on doit réduire la complexité. En conséquence,
les paramètres physiques peuvent perdre leur interprétation et donc leur mesurabilité.
Il existe des modèles paramétrés sans aucune justification physique. Leurs but est
simplement de représenter le système dans des conditions particulières de fonctionnement.
Ces modèles sont dits modèles de comportement ou boites noires.
II.3. Classification des systèmes à modeler :
La plupart des problèmes de commande sont multidisciplinaires. Le système peut se
composer d'éléments électriques, mécaniques, thermiques, optiques, composants
hydrauliques et ou autres physiques, aussi bien que les systèmes économiques, biologiques,
ou écologiques.
Chapitre : I La Commande et la stabilité des systèmes linéaires
20
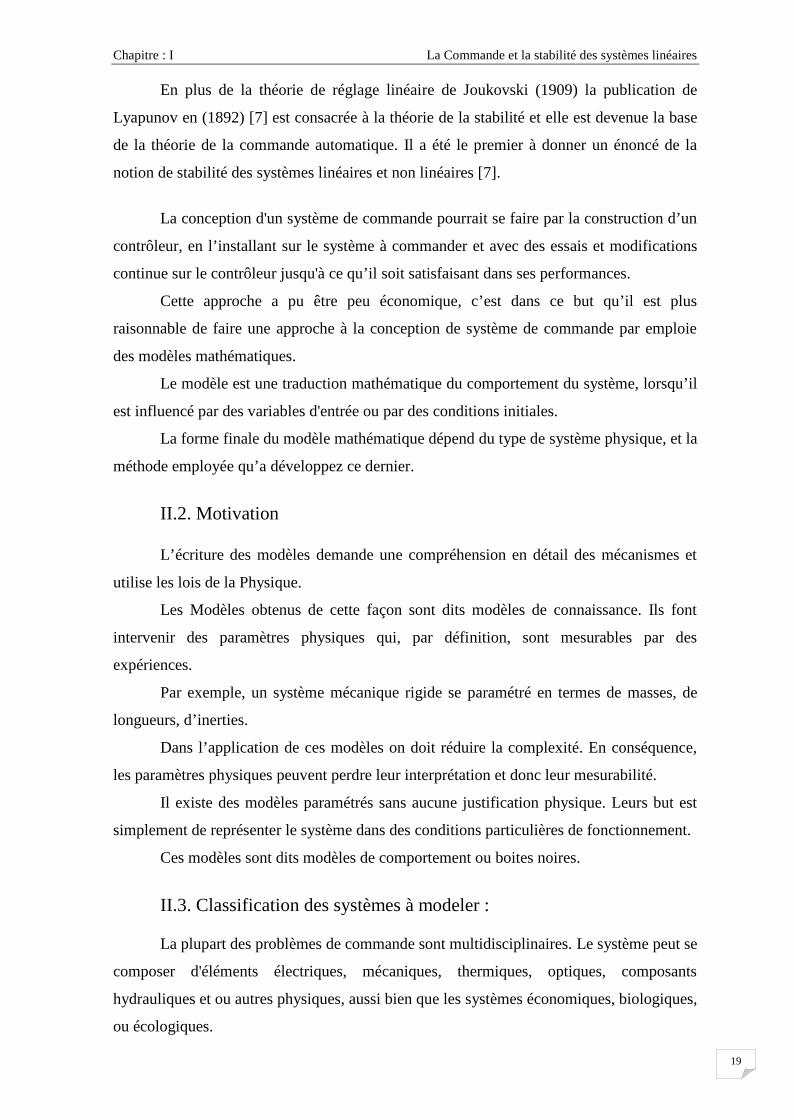
Les liens qui existent entre ces disciplines, basées sur la similitude des équations
mathématiques qui décrivent les phénomènes.
Les classes des systèmes qui pourraient être produits dans des systèmes de
commande modélisés sont montrées sur la figure (1.5) [9].
Figure. I.5 : Classes principales des systèmes.
III. Théorie de la commande
III.1. Introduction :
Le but d’un système de commande est d’exercer des actions entraînant une
amélioration du comportement du système et de ses performances.
L’ensemble des méthodes permettant l’analyse du comportement d’un système
donné et la synthèse des systèmes de commande satisfaisant des spécifications de
performance définit la théorie de la commande.
La théorie de la commande, développe des correcteurs (régulateurs) qui pouvant
être mis en œuvre sur des systèmes technologiques réels. Quelle que soit la nature du
système à commander, on peut classer les différentes structures de commande en deux
grandes familles :
- Les structures de commande en boucle ouverte
- Les structures de commande à contre-réaction appelées également : structures
de commande en boucle fermée.
Classes desSystèmes
ParamètreGroupés
ParamètresDistribués
DiterministesStochastiques
DiscretContinue
Non linéaireLinéaire
Coeff. ConstantTemps Variant
Non HomogèneHomogène
Chapitre : I La Commande et la stabilité des systèmes linéaires
21
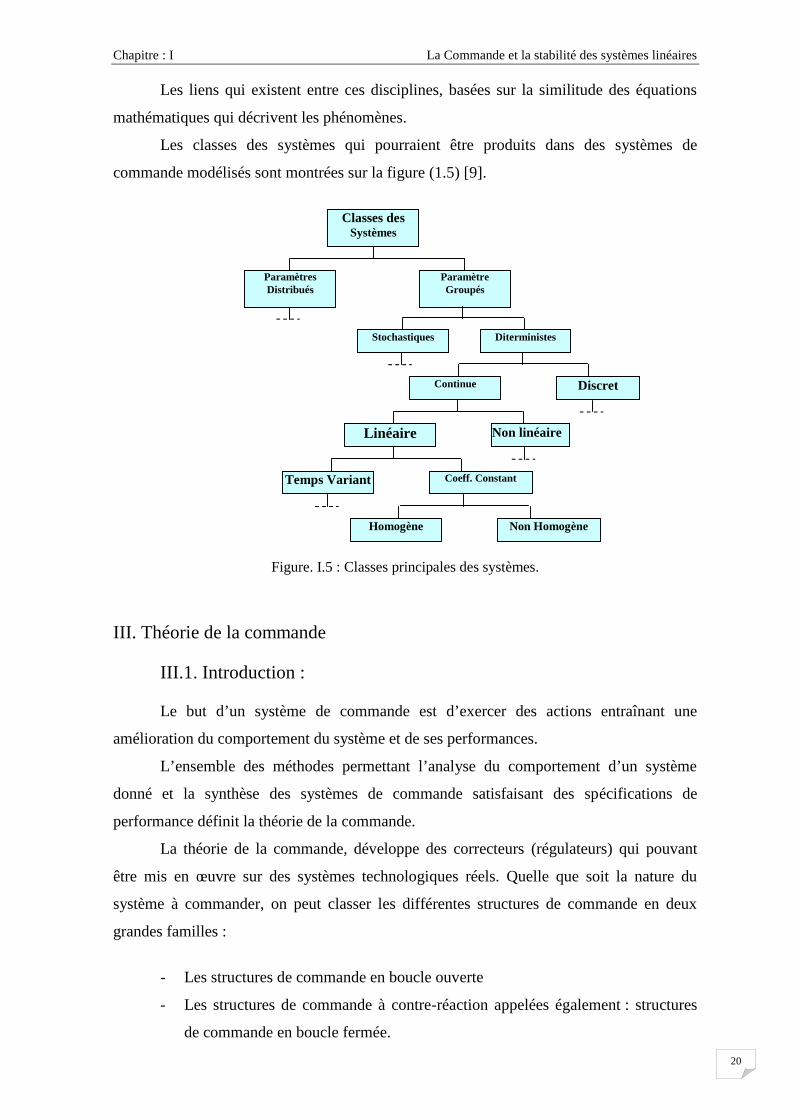
III.2. La commande en boucle ouverte
En l’absence d’entrées perturbatrices et en supposant que le modèle mathématique
du système est parfait, on peut générer un signal de commande produisant le signal de
sortie souhaité s(t) en exploitant la connaissance des dynamiques du système.
Figure. I.6. Schéma de principe d’un système de commande en Boucle ouverte (BO).
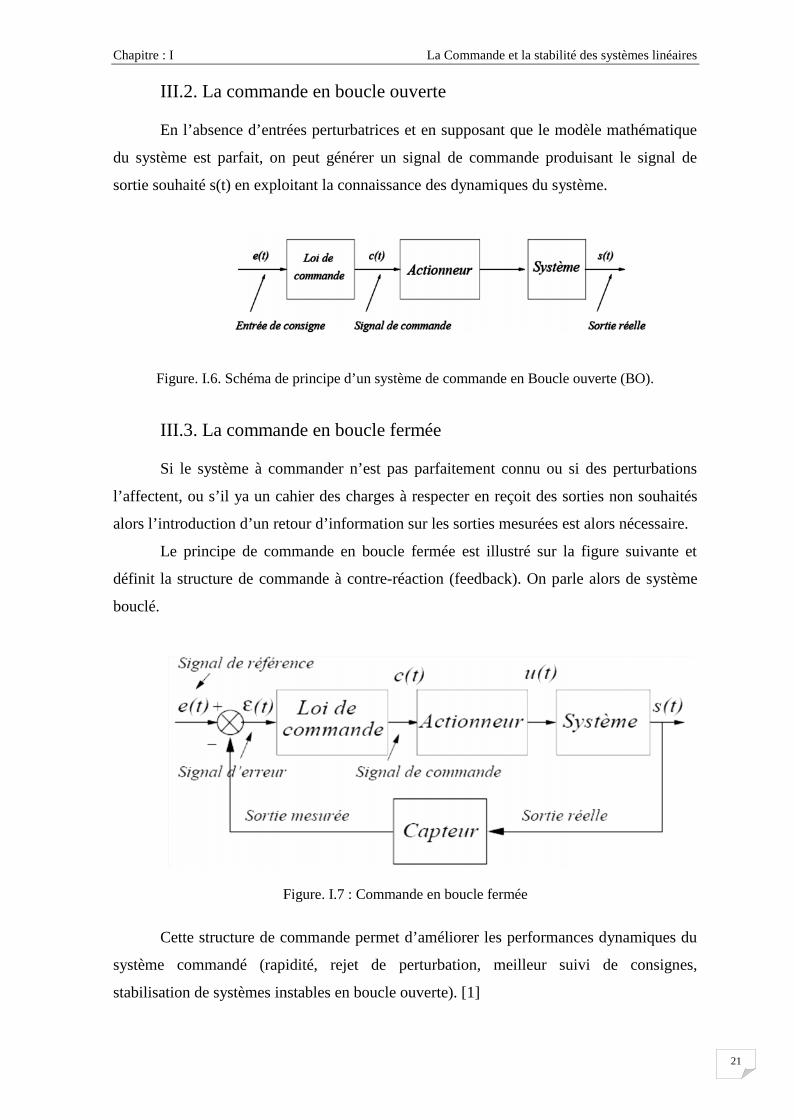
III.3. La commande en boucle fermée
Si le système à commander n’est pas parfaitement connu ou si des perturbations
l’affectent, ou s’il ya un cahier des charges à respecter en reçoit des sorties non souhaités
alors l’introduction d’un retour d’information sur les sorties mesurées est alors nécessaire.
Le principe de commande en boucle fermée est illustré sur la figure suivante et
définit la structure de commande à contre-réaction (feedback). On parle alors de système
bouclé.
Figure. I.7 : Commande en boucle fermée
Cette structure de commande permet d’améliorer les performances dynamiques du
système commandé (rapidité, rejet de perturbation, meilleur suivi de consignes,
stabilisation de systèmes instables en boucle ouverte). [1]
Chapitre : I La Commande et la stabilité des systèmes linéaires
21
III.2. La commande en boucle ouverte
En l’absence d’entrées perturbatrices et en supposant que le modèle mathématique
du système est parfait, on peut générer un signal de commande produisant le signal de
sortie souhaité s(t) en exploitant la connaissance des dynamiques du système.
Figure. I.6. Schéma de principe d’un système de commande en Boucle ouverte (BO).
III.3. La commande en boucle fermée
Si le système à commander n’est pas parfaitement connu ou si des perturbations
l’affectent, ou s’il ya un cahier des charges à respecter en reçoit des sorties non souhaités
alors l’introduction d’un retour d’information sur les sorties mesurées est alors nécessaire.
Le principe de commande en boucle fermée est illustré sur la figure suivante et
définit la structure de commande à contre-réaction (feedback). On parle alors de système
bouclé.
Figure. I.7 : Commande en boucle fermée
Cette structure de commande permet d’améliorer les performances dynamiques du
système commandé (rapidité, rejet de perturbation, meilleur suivi de consignes,
stabilisation de systèmes instables en boucle ouverte). [1]
Chapitre : I La Commande et la stabilité des systèmes linéaires
21
III.2. La commande en boucle ouverte
En l’absence d’entrées perturbatrices et en supposant que le modèle mathématique
du système est parfait, on peut générer un signal de commande produisant le signal de
sortie souhaité s(t) en exploitant la connaissance des dynamiques du système.
Figure. I.6. Schéma de principe d’un système de commande en Boucle ouverte (BO).
III.3. La commande en boucle fermée
Si le système à commander n’est pas parfaitement connu ou si des perturbations
l’affectent, ou s’il ya un cahier des charges à respecter en reçoit des sorties non souhaités
alors l’introduction d’un retour d’information sur les sorties mesurées est alors nécessaire.
Le principe de commande en boucle fermée est illustré sur la figure suivante et
définit la structure de commande à contre-réaction (feedback). On parle alors de système
bouclé.
Figure. I.7 : Commande en boucle fermée
Cette structure de commande permet d’améliorer les performances dynamiques du
système commandé (rapidité, rejet de perturbation, meilleur suivi de consignes,
stabilisation de systèmes instables en boucle ouverte). [1]
Chapitre : I La Commande et la stabilité des systèmes linéaires
22
Il est important de remarquer que cette structure de commande ne présente pas que
des avantages. Elle nécessite l’emploi de capteurs qui augmentent le coût d’une
installation.
Un système de commande peut réaliser deux fonctions différentes :
- L’asservissement : c’est à dire la poursuite par la sortie d’une consigne variable
dans le temps.
- La régulation : c’est à dire la compensation de l’effet de perturbations variables
sur la sortie avec une consigne fixe.
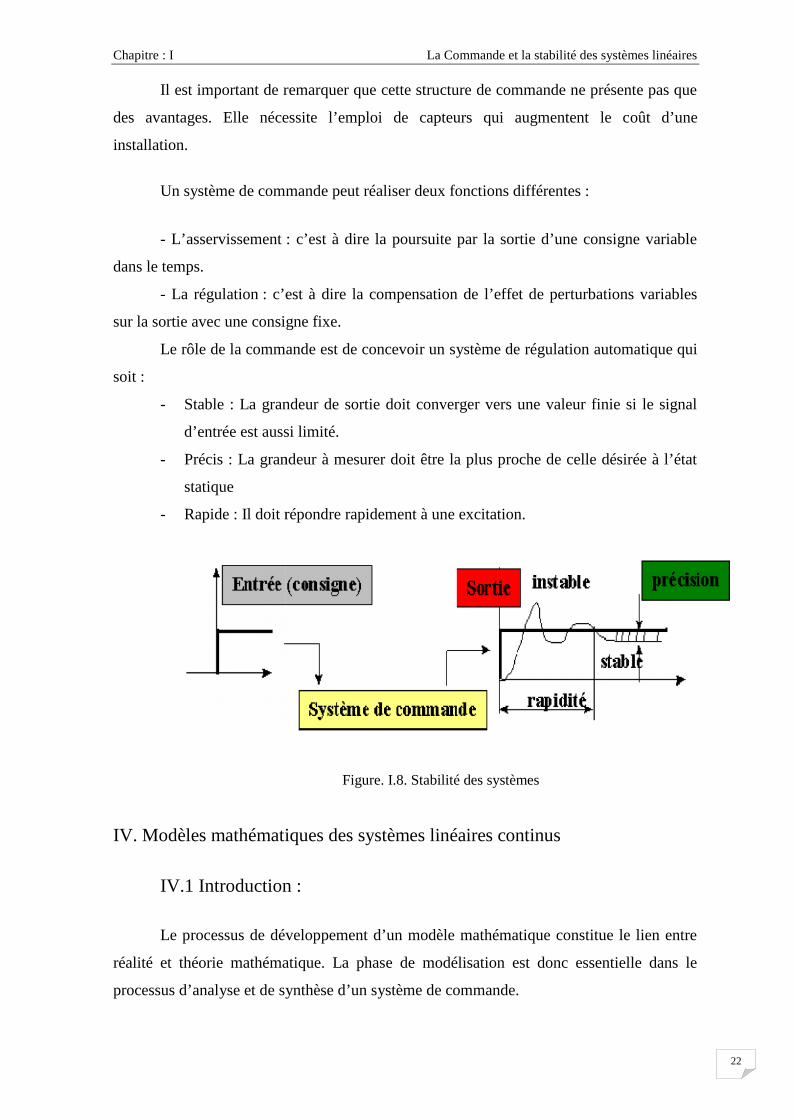
Le rôle de la commande est de concevoir un système de régulation automatique qui
soit :
- Stable : La grandeur de sortie doit converger vers une valeur finie si le signal
d’entrée est aussi limité.
- Précis : La grandeur à mesurer doit être la plus proche de celle désirée à l’état
statique
- Rapide : Il doit répondre rapidement à une excitation.
Figure. I.8. Stabilité des systèmes
IV. Modèles mathématiques des systèmes linéaires continus
IV.1 Introduction :
Le processus de développement d’un modèle mathématique constitue le lien entre
réalité et théorie mathématique. La phase de modélisation est donc essentielle dans le
processus d’analyse et de synthèse d’un système de commande.
Chapitre : I La Commande et la stabilité des systèmes linéaires
22
Il est important de remarquer que cette structure de commande ne présente pas que
des avantages. Elle nécessite l’emploi de capteurs qui augmentent le coût d’une
installation.
Un système de commande peut réaliser deux fonctions différentes :
- L’asservissement : c’est à dire la poursuite par la sortie d’une consigne variable
dans le temps.
- La régulation : c’est à dire la compensation de l’effet de perturbations variables
sur la sortie avec une consigne fixe.
Le rôle de la commande est de concevoir un système de régulation automatique qui
soit :
- Stable : La grandeur de sortie doit converger vers une valeur finie si le signal
d’entrée est aussi limité.
- Précis : La grandeur à mesurer doit être la plus proche de celle désirée à l’état
statique
- Rapide : Il doit répondre rapidement à une excitation.
Figure. I.8. Stabilité des systèmes
IV. Modèles mathématiques des systèmes linéaires continus
IV.1 Introduction :
Le processus de développement d’un modèle mathématique constitue le lien entre
réalité et théorie mathématique. La phase de modélisation est donc essentielle dans le
processus d’analyse et de synthèse d’un système de commande.
Chapitre : I La Commande et la stabilité des systèmes linéaires
22
Il est important de remarquer que cette structure de commande ne présente pas que
des avantages. Elle nécessite l’emploi de capteurs qui augmentent le coût d’une
installation.
Un système de commande peut réaliser deux fonctions différentes :
- L’asservissement : c’est à dire la poursuite par la sortie d’une consigne variable
dans le temps.
- La régulation : c’est à dire la compensation de l’effet de perturbations variables
sur la sortie avec une consigne fixe.
Le rôle de la commande est de concevoir un système de régulation automatique qui
soit :
- Stable : La grandeur de sortie doit converger vers une valeur finie si le signal
d’entrée est aussi limité.
- Précis : La grandeur à mesurer doit être la plus proche de celle désirée à l’état
statique
- Rapide : Il doit répondre rapidement à une excitation.
Figure. I.8. Stabilité des systèmes
IV. Modèles mathématiques des systèmes linéaires continus
IV.1 Introduction :
Le processus de développement d’un modèle mathématique constitue le lien entre
réalité et théorie mathématique. La phase de modélisation est donc essentielle dans le
processus d’analyse et de synthèse d’un système de commande.
Chapitre : I La Commande et la stabilité des systèmes linéaires
23
La démarche globale peut se résumer de la manière suivante :
1- Définir le système à étudier et ses composants élémentaires.
2- Formuler le modèle mathématique idéal et dresser la liste des hypothèses à
retenir.
3- Ecrire les lois physiques régissant le comportement du système, et les équations
différentielles et algébriques associées.
4- Définir le modèle dédié à l’Automatique.
La complexité du modèle résultant va nous guider à conditionner le choix des
méthodes d’analyse et de synthèse qu’il sera possible de lui appliquer.
IV.2 Approximation linéaire des systèmes physiques
Il est donc important de pouvoir disposer de modèles mathématiques linéaires
suffisamment représentatifs des systèmes physiques réels afin d’y appliquer les nombreux
outils d’analyse existant et fournissant des informations essentielles sur les systèmes non
linéaire [1].
La procédure de linéarisation autour d’un point de fonctionnement est
essentiellement basée sur les développements en séries de Taylor dont les termes d’ordre
supérieur a un sont négligés.
Il est nécessaire de vérifier que cette approximation est valide et que l’on est
toujours dans un voisinage du point à lequel est effectuée la linéarisation.
IV.3 Equations dynamique d’un système linéaire :
Un système linéaire est caractérisé par une équation différentielle linéaire à
coefficients constants de la forme suivante :
m
m
mn
n
n dt
tvda
td
tdvatva
dt
tydb
dt
tdybtyb
)(...
)(
)()(
)(...
)()( 1010 +++=+++ (1.1)
L’équation (1.1) est additive, c’est à dire que l’on a :
)()()( 2121 vsvyvvy +=+
On appelle l’ordre de l’équation (1.1) n l’ordre du système linéaire.

Chapitre : I La Commande et la stabilité des systèmes linéaires
24
IV.4. Fonction de transfert d’un système linéaire
IV.4.1. Réponse d’un système linéaire
Si l’on veut connaître la réponse d’un système linéaire, il suffit de résoudre
l’équation (1.1). On utilise La Transformée de Laplace pour simplifier la résolution de ces
équations pour aboutir en fin à faire un lien direct entre les réponses des systèmes et la TL.
IV.4.2. Rappels sur la transformée de Laplace
IV.4.2.1. Définition :
Soit une fonction f définie pour 0≥t . On définit sa transformée de la place F par :
[ ] dtetftfTLsF st .).()()(0∫
+∞−== (1.2)
IV.4.2.2. Définition :
On appelle fonction de transfert ou transmittance T(P) d’un système linéaire le
rapport entre la transformée de Laplace de la sortie S(p) sur celle de l’entrée E(p).
Figure. I.9. Schéma fonctionnel d’une fonction de transfert
nn
mm
sbsbb
sasaa
sE
sSsT
++++++==
...
...
)(
)()(
10
.10 (1.3)
V. Le modèle interne- la représentation d’état
V.1. Le concept d’état d’un système :
La théorie moderne de la commande des systèmes repose en grande partie sur le
concept d’état d’un système et sur le modèle : la représentation d’état. Le concept d’état a
été introduit par : R.E. Kalman et par les ingénieurs travaillant sur les premières
applications spatiales (Apollo, Polaris) aux débuts des années 60 [1].
T(s)E(s) S(s)
Chapitre : I La Commande et la stabilité des systèmes linéaires
25
V.2. Représentation d’état des systèmes dynamiques
La représentation d’état est un modèle interne structuré qui s’applique aux systèmes
temps-variant ou non linéaires.
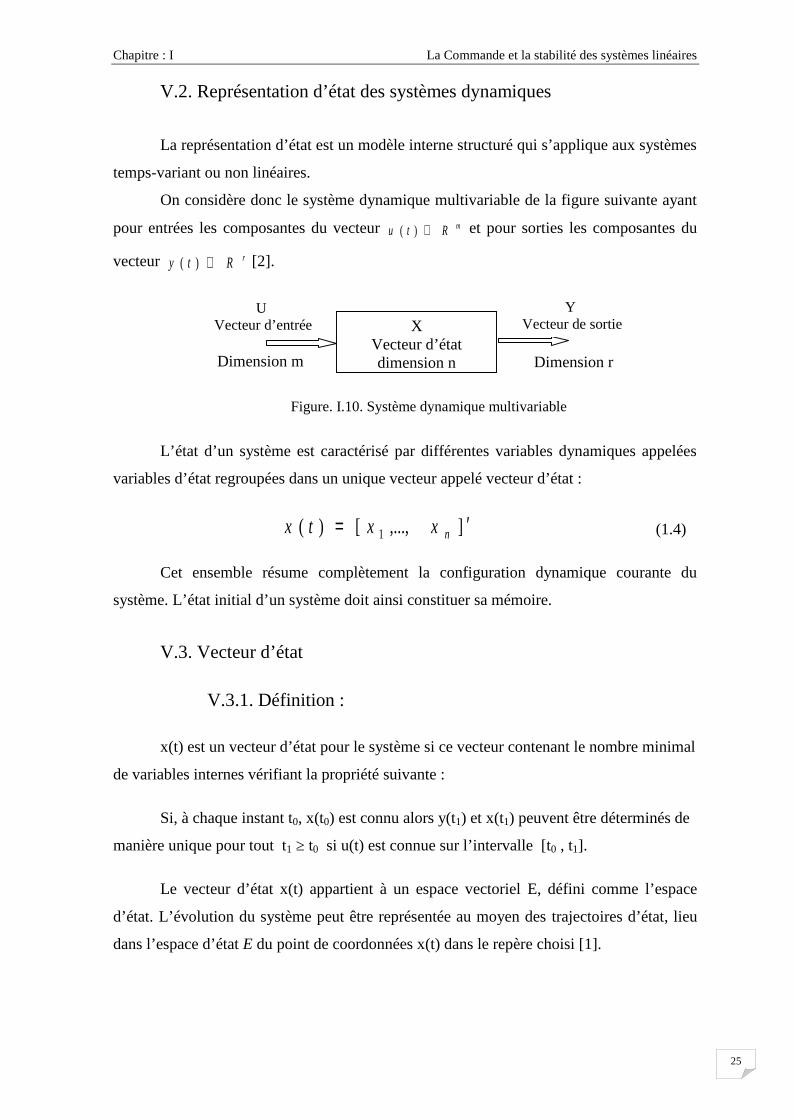
On considère donc le système dynamique multivariable de la figure suivante ayant
pour entrées les composantes du vecteur mRtu ∈)( et pour sorties les composantes du
vecteur rRty ∈)( [2].
Figure. I.10. Système dynamique multivariable
L’état d’un système est caractérisé par différentes variables dynamiques appelées
variables d’état regroupées dans un unique vecteur appelé vecteur d’état :
],...,[)( 1 ′= nxxtx (1.4)
Cet ensemble résume complètement la configuration dynamique courante du
système. L’état initial d’un système doit ainsi constituer sa mémoire.
V.3. Vecteur d’état
V.3.1. Définition :
x(t) est un vecteur d’état pour le système si ce vecteur contenant le nombre minimal
de variables internes vérifiant la propriété suivante :
Si, à chaque instant t0, x(t0) est connu alors y(t1) et x(t1) peuvent être déterminés de
manière unique pour tout t1 ≥ t0 si u(t) est connue sur l’intervalle [t0 , t1].
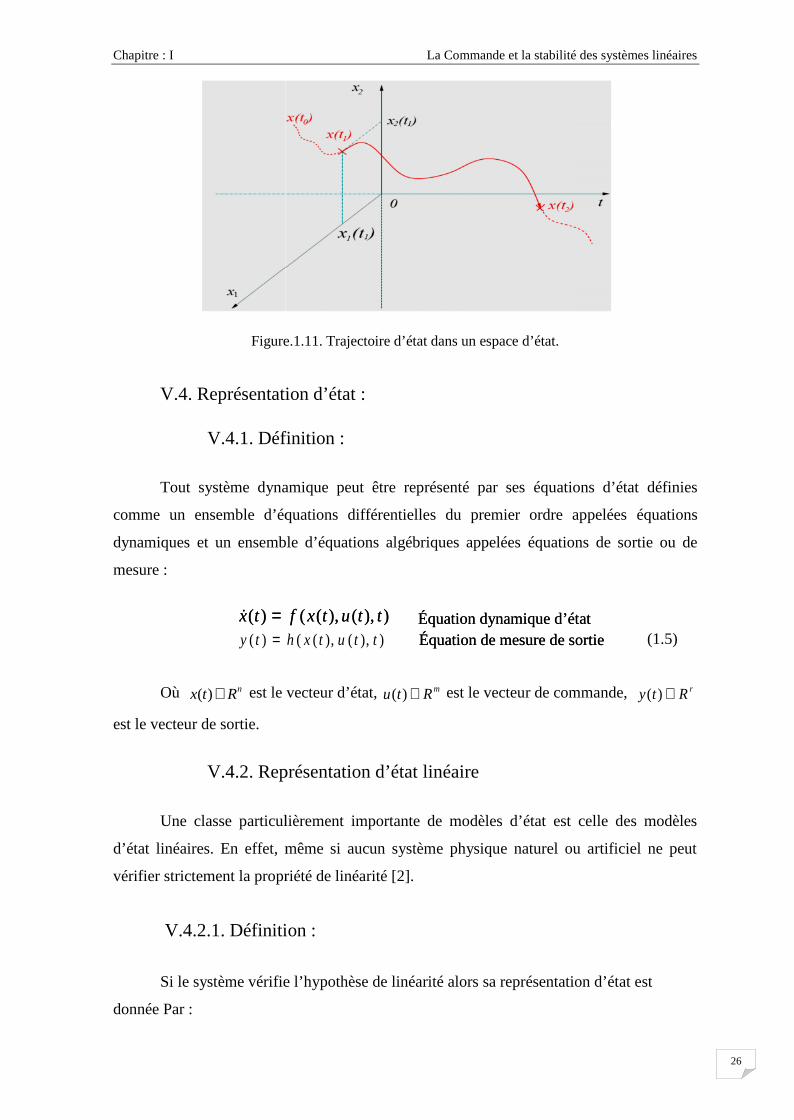
Le vecteur d’état x(t) appartient à un espace vectoriel E, défini comme l’espace
d’état. L’évolution du système peut être représentée au moyen des trajectoires d’état, lieu
dans l’espace d’état E du point de coordonnées x(t) dans le repère choisi [1].
XVecteur d’étatdimension n
UVecteur d’entrée
Vecteur
YVecteur de sortie
VecteurDimension m Dimension r
Chapitre : I La Commande et la stabilité des systèmes linéaires
26
Figure.1.11. Trajectoire d’état dans un espace d’état.
V.4. Représentation d’état :
V.4.1. Définition :
Tout système dynamique peut être représenté par ses équations d’état définies
comme un ensemble d’équations différentielles du premier ordre appelées équations
dynamiques et un ensemble d’équations algébriques appelées équations de sortie ou de
mesure :
)),(),(()( ttutxftx =
)),(),(()( ttutxhty = (1.5)
Où nRtx ∈)( est le vecteur d’état, mRtu ∈)( est le vecteur de commande, rRty ∈)(
est le vecteur de sortie.
V.4.2. Représentation d’état linéaire
Une classe particulièrement importante de modèles d’état est celle des modèles
d’état linéaires. En effet, même si aucun système physique naturel ou artificiel ne peut
vérifier strictement la propriété de linéarité [2].
V.4.2.1. Définition :
Si le système vérifie l’hypothèse de linéarité alors sa représentation d’état est
donnée Par :
Équation dynamique d’étatÉquation de mesure de sortie
Chapitre : I La Commande et la stabilité des systèmes linéaires
26
Figure.1.11. Trajectoire d’état dans un espace d’état.
V.4. Représentation d’état :
V.4.1. Définition :
Tout système dynamique peut être représenté par ses équations d’état définies
comme un ensemble d’équations différentielles du premier ordre appelées équations
dynamiques et un ensemble d’équations algébriques appelées équations de sortie ou de
mesure :
)),(),(()( ttutxftx =
)),(),(()( ttutxhty = (1.5)
Où nRtx ∈)( est le vecteur d’état, mRtu ∈)( est le vecteur de commande, rRty ∈)(
est le vecteur de sortie.
V.4.2. Représentation d’état linéaire
Une classe particulièrement importante de modèles d’état est celle des modèles
d’état linéaires. En effet, même si aucun système physique naturel ou artificiel ne peut
vérifier strictement la propriété de linéarité [2].
V.4.2.1. Définition :
Si le système vérifie l’hypothèse de linéarité alors sa représentation d’état est
donnée Par :
Équation dynamique d’étatÉquation de mesure de sortie
Chapitre : I La Commande et la stabilité des systèmes linéaires
26
Figure.1.11. Trajectoire d’état dans un espace d’état.
V.4. Représentation d’état :
V.4.1. Définition :
Tout système dynamique peut être représenté par ses équations d’état définies
comme un ensemble d’équations différentielles du premier ordre appelées équations
dynamiques et un ensemble d’équations algébriques appelées équations de sortie ou de
mesure :
)),(),(()( ttutxftx =
)),(),(()( ttutxhty = (1.5)
Où nRtx ∈)( est le vecteur d’état, mRtu ∈)( est le vecteur de commande, rRty ∈)(
est le vecteur de sortie.
V.4.2. Représentation d’état linéaire
Une classe particulièrement importante de modèles d’état est celle des modèles
d’état linéaires. En effet, même si aucun système physique naturel ou artificiel ne peut
vérifier strictement la propriété de linéarité [2].
V.4.2.1. Définition :
Si le système vérifie l’hypothèse de linéarité alors sa représentation d’état est
donnée Par :
Équation dynamique d’étatÉquation de mesure de sortie

Chapitre : I La Commande et la stabilité des systèmes linéaires
27
+=+=
•
)()()(
)()()(
tuDtxCty
tuBtxAtx (1.6)
Avec :- nnRA ×∈ est la matrice d’état.- mnRB ×∈ est la matrice de commande ou d’entrée.- nrRC ×∈ est la matrice de mesure ou de sortie.- mrRD ×∈ est la matrice de transmission directe.
Un modèle d’état LTI est donc complètement caractérise par le quadriplet A, B,C,D.
Si les matrices A, B, C, D sont constantes, le système est dit : Linéaire a Temps
Invariant (LTI).
V.5. Les modèles externes (entrées-sorties) :
L’idée fondamentale derrière l’utilisation de modèles externes (entrées-sorties) est
d’utiliser l’information minimale afin de modéliser le comportement (relation causale
entrées-sorties).
V.5.1 La matrice de transfert
Soit le système multivariable dont le modèle d’état est donné ci-dessous :
+=+=
•
)()()(
)()()(
tuDtxCty
tuBtxAtx Avec 00 )( xtx = (1.7)
Ou nRtx ∈)( , mRtu ∈)( et rRty ∈)( .
Figure.1.12 Systèmes multivariable
Du fait de la linéarité de l’opérateur de Laplace, il est possible de l’appliquer aux
équations de (1.7) :
)()()(. 0 sBUsAXxsXS +=− (1.8)
Système linéairemultivariable
mu2u 2y
ry
1y1u
Chapitre : I La Commande et la stabilité des systèmes linéaires
28
Ou: )]([)()]([)()],([)( tyLsYettuLsUtxLsX ===
En résolvant les équations (1.8) par rapport à Y (s), il vient :
)())(()()( 01 sDUxsBUAsICsY ++−= − (1.9)
Pour des conditions initiales nulles, x(0) = 0, on obtient la relation entrées-sorties :
)().()(].)([)( 1 sUsGsUDBAsICsY =+−= − (1.10)
V.5.1.1. Définition (Matrice de transfert) :
La matrice mrCsG ×∈)( est appelée matrice de transfert liant l’entrée U(s) à la sortie
Y(s) :)()()( sUsGsY ×= (1.11)
])([)( 1 DBAsICsG +−= − (1.12)
Remarque :
La matrice de transfert permet de représenter le comportement dynamique du
système de manière algébrique.
VI. Commande linéaire
VI.1. Introduction
Un système linéaire est stabilisable s’il existe une commande en boucle fermée telle
que le système commandé soit stable.
Si la commande utilise un retour d’état, il suffit que les modes instables du système
soient commandable [8].
D’une façon générale, la commande en boucle fermée cherche à répondre à des
objectifs de :
(i) Stabilité : retour à l’état d’équilibre après une perturbation ;
(ii) Performance de régulation : rejet d’une perturbation, ainsi que la rapidité du
rejet.
En termes de performances, il s’agit donc de déplacer les valeurs propres de la
boucle fermée dans le demi-plan complexe gauche, le plus loin possible de l'axe
imaginaire[8].
Chapitre : I La Commande et la stabilité des systèmes linéaires
29
VI.2 Formulation du problème de commande à retour d’état
La commande par retour d'état est une méthode employée en asservissement pour
placer les pôles en boucle fermée dans le plan S. L'intérêt de cette technique est que les
pôles, correspondant à la valeur propre du système, vont influencer la dynamique du
système bouclé.
Soit le système à régler décrit par le modèle d’état :
=+=
•
)()(
)()()(
txCty
tuBtxAtx (1.13)
Le problème est de trouver un retour d’état stabilisant, optimal, performant.
Il s’agit donc de trouver la matrice de gain du retour d’état K :
)(.)( txKtu −=
Avec la dimension de nmK .=
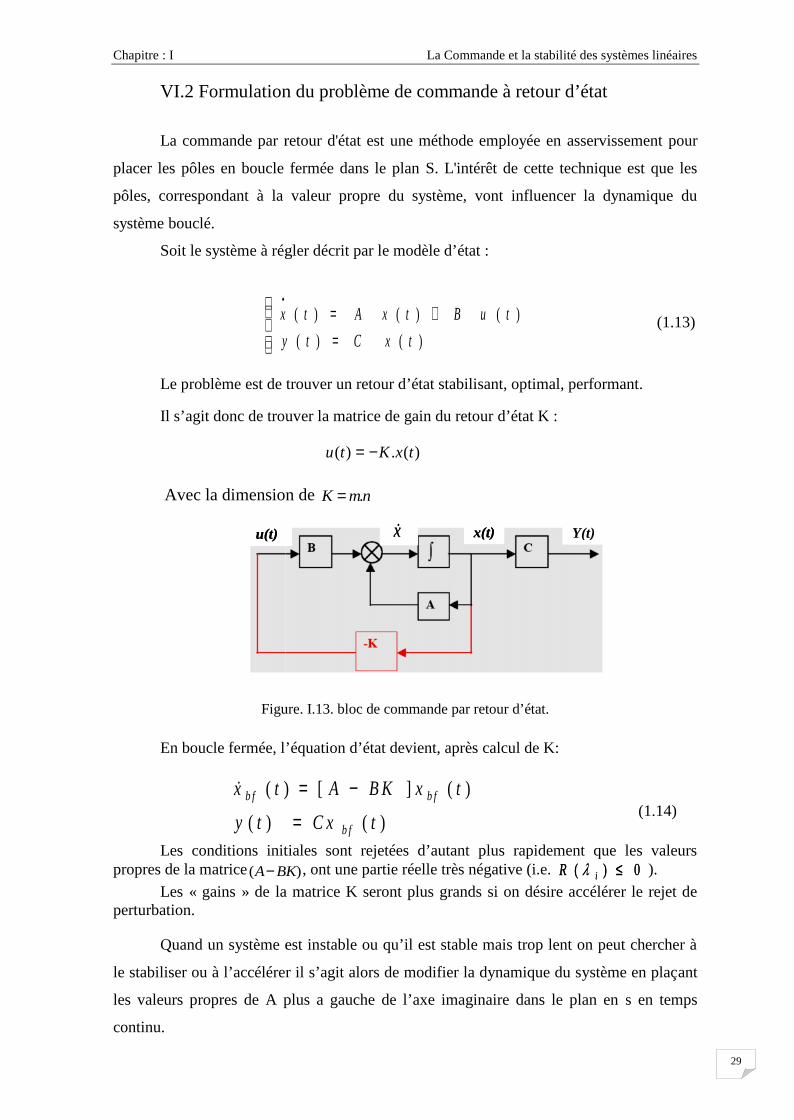
Figure. I.13. bloc de commande par retour d’état.
En boucle fermée, l’équation d’état devient, après calcul de K:
)()(
)(][)(
tC xty
txB KAtx
b f
b fb f
=
−=(1.14)
Les conditions initiales sont rejetées d’autant plus rapidement que les valeurspropres de la matrice )( BKA− , ont une partie réelle très négative (i.e. 0)( ≤iR ).
Les « gains » de la matrice K seront plus grands si on désire accélérer le rejet deperturbation.
Quand un système est instable ou qu’il est stable mais trop lent on peut chercher à
le stabiliser ou à l’accélérer il s’agit alors de modifier la dynamique du système en plaçant
les valeurs propres de A plus a gauche de l’axe imaginaire dans le plan en s en temps
continu.
Y(t)u(t) x(t)x
Chapitre : I La Commande et la stabilité des systèmes linéaires
29
VI.2 Formulation du problème de commande à retour d’état
La commande par retour d'état est une méthode employée en asservissement pour
placer les pôles en boucle fermée dans le plan S. L'intérêt de cette technique est que les
pôles, correspondant à la valeur propre du système, vont influencer la dynamique du
système bouclé.
Soit le système à régler décrit par le modèle d’état :
=+=
•
)()(
)()()(
txCty
tuBtxAtx (1.13)
Le problème est de trouver un retour d’état stabilisant, optimal, performant.
Il s’agit donc de trouver la matrice de gain du retour d’état K :
)(.)( txKtu −=
Avec la dimension de nmK .=
Figure. I.13. bloc de commande par retour d’état.
En boucle fermée, l’équation d’état devient, après calcul de K:
)()(
)(][)(
tC xty
txB KAtx
b f
b fb f
=
−=(1.14)
Les conditions initiales sont rejetées d’autant plus rapidement que les valeurspropres de la matrice )( BKA− , ont une partie réelle très négative (i.e. 0)( ≤iR ).
Les « gains » de la matrice K seront plus grands si on désire accélérer le rejet deperturbation.
Quand un système est instable ou qu’il est stable mais trop lent on peut chercher à
le stabiliser ou à l’accélérer il s’agit alors de modifier la dynamique du système en plaçant
les valeurs propres de A plus a gauche de l’axe imaginaire dans le plan en s en temps
continu.
Y(t)u(t) x(t)x
Chapitre : I La Commande et la stabilité des systèmes linéaires
29
VI.2 Formulation du problème de commande à retour d’état
La commande par retour d'état est une méthode employée en asservissement pour
placer les pôles en boucle fermée dans le plan S. L'intérêt de cette technique est que les
pôles, correspondant à la valeur propre du système, vont influencer la dynamique du
système bouclé.
Soit le système à régler décrit par le modèle d’état :
=+=
•
)()(
)()()(
txCty
tuBtxAtx (1.13)
Le problème est de trouver un retour d’état stabilisant, optimal, performant.
Il s’agit donc de trouver la matrice de gain du retour d’état K :
)(.)( txKtu −=
Avec la dimension de nmK .=
Figure. I.13. bloc de commande par retour d’état.
En boucle fermée, l’équation d’état devient, après calcul de K:
)()(
)(][)(
tC xty
txB KAtx
b f
b fb f
=
−=(1.14)
Les conditions initiales sont rejetées d’autant plus rapidement que les valeurspropres de la matrice )( BKA− , ont une partie réelle très négative (i.e. 0)( ≤iR ).
Les « gains » de la matrice K seront plus grands si on désire accélérer le rejet deperturbation.
Quand un système est instable ou qu’il est stable mais trop lent on peut chercher à
le stabiliser ou à l’accélérer il s’agit alors de modifier la dynamique du système en plaçant
les valeurs propres de A plus a gauche de l’axe imaginaire dans le plan en s en temps
continu.
Y(t)u(t) x(t)x
Chapitre : I La Commande et la stabilité des systèmes linéaires
30
VI.3 Théorème général
VI.3.1 Définition :
La paire (A, B) est stabilisable par retour d’état si et seulement si il existe K telle
que )( BKA− soit asymptotiquement stable. [10]
VI.3.2 Théorème :
La paire (A, B) est stabilisable par retour d’état si et seulement si tous les modes
instables (i.e. non asymptotiquement stables) sont commandable.
VI.4 Description de performances
VI.4.1 Stabilité de la boucle fermée :
La stabilité du système commandé est la première performance exigée. Dans
le cadre de la commande en boucle fermée des systèmes linéaires monovariables à
partir des modèles exacts, les méthodes habituelles d’analyse de stabilité de boucle
fermée suffisent :
- lieu des racines,
- plan de phase,
- critère de Nyquist
- critères algébriques,
S’il s’agit de la commande robuste, la première exigence est la robustesse de
la stabilité. Daprès les travaux de Bode et Nyquist (1930-1950) cette exigence est
présente à travers les notions de marge de stabilité : marge de gain et marge de
phase [10].
VI.5. Stabilité des systèmes linéaires déterministes :
Un système linéaire déterministe est un système basé sur un modèle
mathématique connus dont sa fonction de transfert est déterminée a partir de la
transforme de Laplace par :
Chapitre : I La Commande et la stabilité des systèmes linéaires
31
)()()( sUsGsY ×= (1.15)
Avec s : variable de Laplace, G(s) : fonction de transfert du système
La transformé de LAPLACE du système (1.13) est :
)()()(. sBUsAXsXS +=
)()( sCXsY =
La matrice de transfert entre U(s) et Y (s) est :
BASICsG 1)()( −−= (1.16)
VI.5.1. Polynôme caractéristique :
Si u(t) = 0 pour 0≥t , la solution de l’équation d’état (1,13) est donnée par :
)0(.)( xtx eAt= (1.17)
Le système est stable si seulement si les parties réelles des valeurs propres de A
sont à partie réel négatives.
VI.6. Stabilité des systèmes
VI.6.1. Introduction :
La notion de stabilité est fondamentale dans le développement des systèmes de
commande. Puisque en absence de cette propriété qualitative, aucun système n’est
utilisable en pratique.
Si l’énergie totale d’un système est dissipée de manière continue alors le système
(qu’il soit linéaire ou non linéaire) devra rejoindre finalement un point d’équilibre. [2]
Les questions de stabilité ont été étudiées par A.M. Lyapunov (1892) qui a donnée
une définition générale englobant de nombreux systèmes physiques [11].
Chapitre : I La Commande et la stabilité des systèmes linéaires
32
La stabilité entrée-sortie n’implique pas nécessairement la stabilité interne. De
même, la notion de stabilité à étudier peut être globale, locale ou semi-globale suivant le
système (non linéaire) considère [2].
En mathématique et en automatique, la notion de stabilité de Lyapunov apparaît
dans l'étude des systèmes dynamiques. L'idée de Aleksandr Lyapunov consiste à dire que
si tous les points d'un système démarrent autour d'un point x et que tous ces points restent
autour de ce point x, alors x est stable au sens de Lyapunov.
De plus, si tous ces points convergent vers x alors x est asymptotiquement stable.
VI.6.2. La stabilité interne :
Cette notion est très liée à celle de l’état, des trajectoires d’état et de point
d’équilibre.
VI.6.2.1. Définition : (état d’équilibre)
Un point ex de la trajectoire d’état d’un système dynamique est un état
d’équilibre si : ee xtxxtx =⇔= )()( 0 t ≥ 0, en l’absence de commande et de
perturbations.
Pour un système dynamique de représentation d’état: ))(),(,()( tutxtftx = , les
points d’équilibre sont les solutions de l’équation algébrique : ))(),(,(0 tutxtf=
.0≥∀ t
Note :
- La stabilité au sens de Lyapunov est également définie comme la stabilité
interne. Elle signifie que la trajectoire d’état peut être gardée arbitrairement près de
xe, si l’on prend une condition initiale suffisamment proche de xe.
VI.6.2.2 Point d’équilibre :
- Soit donc un système, )( xfx = et un point d’équilibre ex .
- De telle sort que: )(0 xfx ==

Chapitre : I La Commande et la stabilité des systèmes linéaires
33
Pour un système linéaire décrit par :
)()()( tButAxtx +=
Avec un bouclage (retour d’état) : Kxu −=
xAxBKAx~
][ =−= (1.18)
– point d’équilibre unique (A non singulière) ex = 0
– 0)( ≤ieR c’est la stabilité asymptotique.
Il existe différents types de stabilités pour caractériser l'évolution d'un point vers
son état stable.
Soit un système autonome ( )x f x= où f D R n: → est une application supposée
localement Lipchitzienne sur D Rn⊂ .
On suppose que l’origine x = 0 est un point d'équilibre du système qui satisfait :
f x D( )0 0 0= ⇒ = ⊂ .
Le point d'équilibre du système ( )x f x= est :
- Stable au sens de Lyapunov si 0>)(0> ∃∀ tel que :
0>,<)(<)0( ttxx ∀⇒ (1.19)
- Instable s'il n'est pas stable.
- Asymptotiquement stable si le point est stable et que :
0)(<)0( →⇒ txx quand ∞→t .
- Exponentiellement stable si le point est stable et que : 0>, ∃ teleque :
0>,)0(.<)0( texx t ∀− (1.20)

Chapitre : I La Commande et la stabilité des systèmes linéaires
34
VI.7. Stabilité et fonction de Lyapunov
VI.7.1. Théorème de Lyapunov (1892) :
On présentera ici le théorème sans dépendance temporelle.
S'il existe une fonction dite de Lyapunov RRxV n →:)( telle que :
++ →∃ RRVV :, 21 Non décroissantes telque :
)(<)(<)( 21 xVxVxV (1.21)
++ →∃ RRV :3 Non décroissante et que :
0>s0,>)(3 ∀sV Tel que )(-<))(( 3 xVtxV
Alors le système est trivialement asymptotiquement stable.
On notera que la première condition ne dépend pas du système. En général, la
fonction de Lyapunov possède une forme quadratique en x :
xPxxV T ..)( = , avec P définie positive ( 0>TPP = ).
Dans le cas linéaire, si le système est définie par : XAX .= le théorème de
Lyapunov est le suivant (formulation originale de Lyapunov) :
0>TPP =∃ Telque :
0>,0.. TT QQQAPPA =∀=++ (1.22)
⇔ A est Hurwitz ⇔ le système est asymptotiquement stable.
Remarque :
On voit ici la puissance du théorème de Lyapunov car il permet de conclure sur la
stabilité d'un système dynamique grâce à une équation algébrique.
Toute la difficulté est de trouver une fonction de Lyapunov V(x) dans le cas général
ou la matrice P dans le cas linéaire.
Chapitre : I La Commande et la stabilité des systèmes linéaires
35
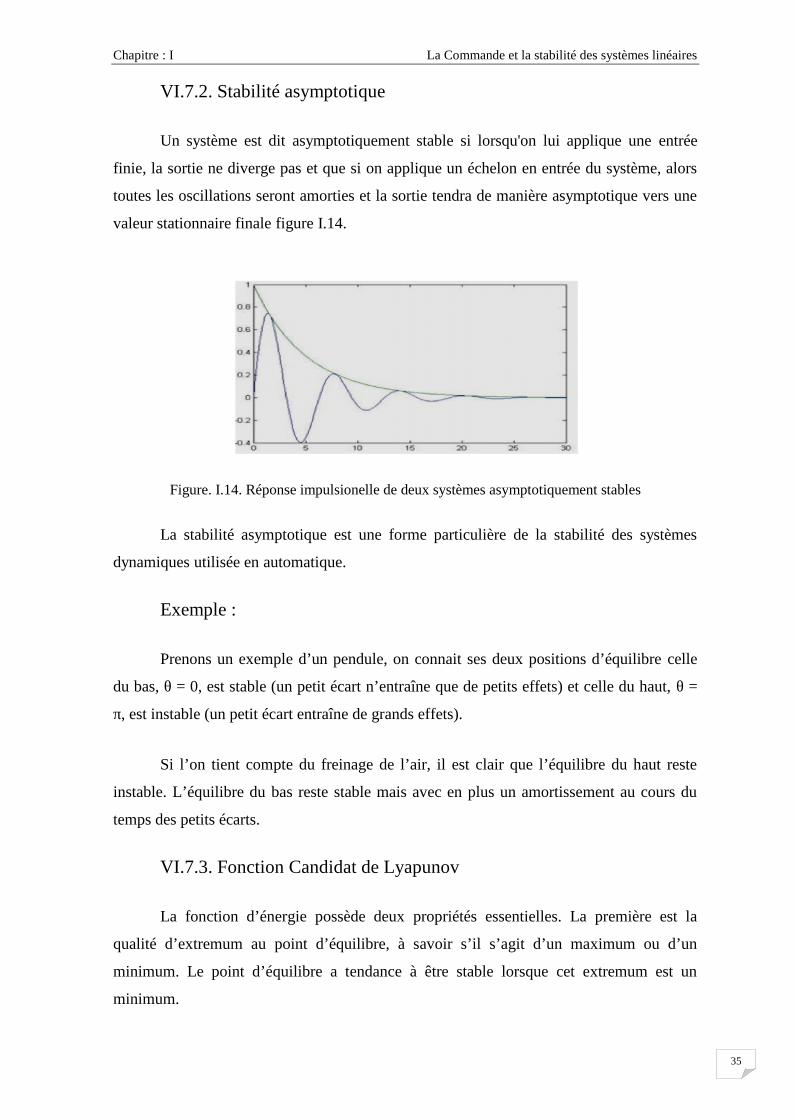
VI.7.2. Stabilité asymptotique
Un système est dit asymptotiquement stable si lorsqu'on lui applique une entrée
finie, la sortie ne diverge pas et que si on applique un échelon en entrée du système, alors
toutes les oscillations seront amorties et la sortie tendra de manière asymptotique vers une
valeur stationnaire finale figure I.14.
Figure. I.14. Réponse impulsionelle de deux systèmes asymptotiquement stables
La stabilité asymptotique est une forme particulière de la stabilité des systèmes
dynamiques utilisée en automatique.
Exemple :
Prenons un exemple d’un pendule, on connait ses deux positions d’équilibre celle
du bas, θ = 0, est stable (un petit écart n’entraîne que de petits effets) et celle du haut, θ =
π, est instable (un petit écart entraîne de grands effets).
Si l’on tient compte du freinage de l’air, il est clair que l’équilibre du haut reste
instable. L’équilibre du bas reste stable mais avec en plus un amortissement au cours du
temps des petits écarts.
VI.7.3. Fonction Candidat de Lyapunov
La fonction d’énergie possède deux propriétés essentielles. La première est la
qualité d’extremum au point d’équilibre, à savoir s’il s’agit d’un maximum ou d’un
minimum. Le point d’équilibre a tendance à être stable lorsque cet extremum est un
minimum.
Chapitre : I La Commande et la stabilité des systèmes linéaires
35
VI.7.2. Stabilité asymptotique
Un système est dit asymptotiquement stable si lorsqu'on lui applique une entrée
finie, la sortie ne diverge pas et que si on applique un échelon en entrée du système, alors
toutes les oscillations seront amorties et la sortie tendra de manière asymptotique vers une
valeur stationnaire finale figure I.14.
Figure. I.14. Réponse impulsionelle de deux systèmes asymptotiquement stables
La stabilité asymptotique est une forme particulière de la stabilité des systèmes
dynamiques utilisée en automatique.
Exemple :
Prenons un exemple d’un pendule, on connait ses deux positions d’équilibre celle
du bas, θ = 0, est stable (un petit écart n’entraîne que de petits effets) et celle du haut, θ =
π, est instable (un petit écart entraîne de grands effets).
Si l’on tient compte du freinage de l’air, il est clair que l’équilibre du haut reste
instable. L’équilibre du bas reste stable mais avec en plus un amortissement au cours du
temps des petits écarts.
VI.7.3. Fonction Candidat de Lyapunov
La fonction d’énergie possède deux propriétés essentielles. La première est la
qualité d’extremum au point d’équilibre, à savoir s’il s’agit d’un maximum ou d’un
minimum. Le point d’équilibre a tendance à être stable lorsque cet extremum est un
minimum.
Chapitre : I La Commande et la stabilité des systèmes linéaires
35
VI.7.2. Stabilité asymptotique
Un système est dit asymptotiquement stable si lorsqu'on lui applique une entrée
finie, la sortie ne diverge pas et que si on applique un échelon en entrée du système, alors
toutes les oscillations seront amorties et la sortie tendra de manière asymptotique vers une
valeur stationnaire finale figure I.14.
Figure. I.14. Réponse impulsionelle de deux systèmes asymptotiquement stables
La stabilité asymptotique est une forme particulière de la stabilité des systèmes
dynamiques utilisée en automatique.
Exemple :
Prenons un exemple d’un pendule, on connait ses deux positions d’équilibre celle
du bas, θ = 0, est stable (un petit écart n’entraîne que de petits effets) et celle du haut, θ =
π, est instable (un petit écart entraîne de grands effets).
Si l’on tient compte du freinage de l’air, il est clair que l’équilibre du haut reste
instable. L’équilibre du bas reste stable mais avec en plus un amortissement au cours du
temps des petits écarts.
VI.7.3. Fonction Candidat de Lyapunov
La fonction d’énergie possède deux propriétés essentielles. La première est la
qualité d’extremum au point d’équilibre, à savoir s’il s’agit d’un maximum ou d’un
minimum. Le point d’équilibre a tendance à être stable lorsque cet extremum est un
minimum.
Chapitre : I La Commande et la stabilité des systèmes linéaires
36
Le candidat Lyapunov est une fonction qui présente ce type de particularité. Afin
de forcer la présence d’un minimum au point d’équilibre, la fonction sera contrainte à être
positive pour toute valeur différente de l’origine. Elle ne pourra s’annuler qu’à l’origine.
VI.7.4. Définition : (Fonction définie positive) :
Une fonction définie positive est une fonction f(x): RR n → telle que :
0,x0,>)( ≠∀xf et 0)( =xf lorsque 0=x .
De plus, cette fonction sera continue. On aboutit donc a la définition du candidat de
Lyapunov.
VI.7.5. Définition : (Candidat de Lyapunov) :
Une fonction définie positive continue, notée V(x), est un candidat de Lyapunov.
VI.8. Fonction de Lyapunov
La deuxième particularité de la fonction d’énergie lors de la présence d’un système
stable, est d’avoir tendance à diminuer pendant l’évolution du système. En conséquence,
en plus du candidat de Lyapunov il faut que la dérivée de cette fonction soit négative.
La dérivée s’écrit :
)()( xfx
VxV
T
∂∂=
•(1.24)
VI.8.1. Définition (Fonction de Lyapunov) :
Une fonction de Lyapunov est un candidat de Lyapunov, à savoir une fonction
continue V (x) telle que :
.0,0)(,0,0>)( ==≠∀ xpourxvxxV (1.25)
Ayant en plus la propriété 0)( ≤xV 0≠∀ x , 0)( =xV pour x = 0.

Chapitre : I La Commande et la stabilité des systèmes linéaires
37
VI.8.2. Théorème (1ère méthode de Lyapunov, invariance de Lasalle) :
Soient la fonction (1.25) avec nRU = (pour simplifier) et une fonction
C 1, V : Rn → [0, +∞ [, telle que :
– si nRX ∈ tend vers l’infini en norme, V (x) tend aussi vers l’infini.
– V décroît le long de toutes les trajectoires, 0≤dt
dV .
Le principe d’invariance consiste simplement a ce que le système caractérisant le
plus grand ensemble invariant contenu dans :
0≤dt
dV
VI.8.3. Définition (stabilité locale) :
Un point d’équilibre x est stable au sens de Lyapunov si, pour tout ε > 0, il existe
η > 0 (dépendant de ε mais indépendant du temps t) tel que, pour tout x vérifiant :
≤− xx , ≤− xxt )( pour tout t > 0. (1.26)
Remarque :
Un petit déséquilibre initial n’entraîne qu’un petit déséquilibre au cours du temps,
déséquilibre qui peut être permanent.
VI.8.4. Définition (Stabilité asymptotique locale) :
Un point d’équilibre x de (1.7) est asymptotiquement stable au sens de Lyapunov
s’il est stable au sens de Lyapunov (cf. définition), et si de plus, pour tout x suffisamment
proche de x alors :
∞→=
txxt )(lim (1.27)
Le théorème de stabilité fondamental de la théorie de Lyapunov peut maintenant
être énonce :

Chapitre : I La Commande et la stabilité des systèmes linéaires
38
VI.8.5. Théorème : (Seconde méthode de Lyapunov, dite aussi méthode
directe) :
- Si une fonction de Lyapunov existe pour un système donné alors ce système est
stable.
- Si la fonction de Lyapunov est strictement décroissante, c’est-à-dire que :
0<)( xV , alors la stabilité est en plus asymptotique. [10]
VI.9. Stabilité exponentielle
Dans La stabilité asymptotique le système converge vers le point d’équilibre,
lorsque le temps tend vers l’infini. Donc Pour pouvoir quantifier la vitesse de convergence,
il est possible d’introduire un concept plus exigeant de stabilité asymptotique.
Si le système lors de sa convergence est compris dans une enveloppe décroissante
comme une exponentielle, nous parlerons de stabilité exponentielle.
VI.9.1. Définition :
0=x est un point d’équilibre localement exponentiellement stable si :
0>∀ et 0>∀ , 0>r∀ tel que,
0>t∀ , textx −≤ )0()( , x∀ . (1.28)
VI.10. Stabilité globale
Le théorème suivant récapitule les conditions :
Théorème :
S’il existe une fonction V telle que :
- V (x) > 0, 0≠∀ x et V (0) = 0
- x → ∞ ∀ V (x) → ∞
- 0<)( xVdt
d , 0≠∀ x
alors 0=x est globalement asymptotiquement stable.

Chapitre : I La Commande et la stabilité des systèmes linéaires
39
La théorie de Lyapunov est une théorie très générale s’appliquant aussi bien aux
systèmes non linéaires que linéaires. Il est intéressant d’interpréter sa signification en
termes de représentation d’état des systèmes linéaires. [10]
VII. Les Systèmes linéaires à retard
VII.1. Définition :
Le retard est caractérisé par le fait que lors de l’application d’un signale à l’entrée
du système à régler, la grandeur de sortie de ce dernier commence à varier seulement après
un temps τ.
Tous les systèmes réels à régler possèdent un retard.
Les systèmes à retard permettent de représenter des phénomènes intervenants dans
de nombreux processus tels les télécommunications, les transports d'énergie ou
d'information,…etc.
VII.2. Retard pur e- sτ (Origine physique du terme de retard pur)
Dans tout système, l’information de sortie est fournie par un capteur. Il se peut que,
pour des raisons d’accessibilité, d’entretien ou d’encombrement, le capteur ne puisse pas
être placé à l’endroit où l’on souhaiterait observer le système. Cela introduit un retard entre
l’instant où le signal est disponible (prêt à être mesuré) et l’instant où il est effectivement
mesuré.
Si y(t) représente le signal à mesurer, l’introduction d’un retard τ donnera lieu au
signal )( −ty . D’après les propriétés de la transformation de Laplace, si la
transformée de Laplace de y(t) s’écrit y(p), alors la transformée de Laplace de )( −ty
s’écrira :
)())(( SyetyL s ×=− − (1.29)
En régime sinusoïdal le terme de retard se − introduit un déphasage × de
la sortie sur l’entrée. Le réglage automatique de l’entrée du système x(t) à partir des
informations recueillies en sortie est difficile car les signaux nécessaires pour prendre des
décisions convenables arrivent parfois trop tard.

Chapitre : I La Commande et la stabilité des systèmes linéaires
40
VII.3. Représentation dans le plan de Black
On pose :sesR −=)( . D’où jejR −=)( .
Le module de )0(1)( dbjR = quelle que soit la valeur de la pulsation w.
Son argument −=)( RArg est proportionnel à w.
Le lieu de Black est donc l’axe 0dB. Le déphasage atteint -90° pour
57,1=
et -180° pour
14,3= .
VII.3.1. Approximations dese−
.
Il est utile et parfois indispensable de disposer d’une bonne approximation du terme
de retard par une fraction rationnelle, en commande ou en simulation.
Le développement limité dese−
donne :
...62
13322
+−+−=− SSSe s (1.30)
On peut ainsi penser approcher se − simplement par :
...11
1 3322
ssss
−+−=+
(1.31)
L’approximation n’est pas très bonne dès que w augmente et il existe en pratique
d’autres approximations certes plus performantes mais aussi plus compliquées.
VII.4. Structure des systèmes à retards
VII.4.1. Systèmes de dimension infinie
Cet axe important de recherche s'est développé depuis le début des années 90, au
départ motivé par des demandes du secteur socio-économique (production de granulats) et
concerne la structure des systèmes linéaires à retard.

Chapitre : I La Commande et la stabilité des systèmes linéaires
41
Ces systèmes peuvent représenter des phénomènes intervenants dans de nombreux
processus tels les télécommunications, les transports d'énergie ou d'information,… [13].
VII.4.2. Détermination de la présence d'un retard pur sur la
fonction de transfert :
Sur la forme standard ou sur la forme pôles/zéros de la fonction de transfert, il est
facile de mettre en évidence l'existence d'un retard pur tr :
Stn
n
mm
nre
SaSa
SbSb
S
KSH −
++++++=
...1
...1)(
1
11
(1.32)
St
i
n
i
i
m
i reSS
zSKSH −
+
=
=
−
−=
∏
∏
)(
)()(
1
1
1 (1.33)
La présence du terme st re − montre la présence d'un retard pur de valeur tr en
secondes.
VII.4.3. Définition
Un système ayant la fonction de transfert (1.32) Peut être décomposé en deux
systèmes ayant les fonctions de transfert :
nn
mm
n SaSa
SbSb
S
KSH
++++++=
...1
...1)(
1
111
(1.34)
Et st reSH −=)(2
H2 étant la fonction de transfert d'un retard pur si tr est positif.
Figure I.14 décomposition d’un système à retard pur
Chapitre : I La Commande et la stabilité des systèmes linéaires
41
Ces systèmes peuvent représenter des phénomènes intervenants dans de nombreux
processus tels les télécommunications, les transports d'énergie ou d'information,… [13].
VII.4.2. Détermination de la présence d'un retard pur sur la
fonction de transfert :
Sur la forme standard ou sur la forme pôles/zéros de la fonction de transfert, il est
facile de mettre en évidence l'existence d'un retard pur tr :
Stn
n
mm
nre
SaSa
SbSb
S
KSH −
++++++=
...1
...1)(
1
11
(1.32)
St
i
n
i
i
m
i reSS
zSKSH −
+
=
=
−
−=
∏
∏
)(
)()(
1
1
1 (1.33)
La présence du terme st re − montre la présence d'un retard pur de valeur tr en
secondes.
VII.4.3. Définition
Un système ayant la fonction de transfert (1.32) Peut être décomposé en deux
systèmes ayant les fonctions de transfert :
nn
mm
n SaSa
SbSb
S
KSH
++++++=
...1
...1)(
1
111
(1.34)
Et st reSH −=)(2
H2 étant la fonction de transfert d'un retard pur si tr est positif.
Figure I.14 décomposition d’un système à retard pur
Chapitre : I La Commande et la stabilité des systèmes linéaires
41
Ces systèmes peuvent représenter des phénomènes intervenants dans de nombreux
processus tels les télécommunications, les transports d'énergie ou d'information,… [13].
VII.4.2. Détermination de la présence d'un retard pur sur la
fonction de transfert :
Sur la forme standard ou sur la forme pôles/zéros de la fonction de transfert, il est
facile de mettre en évidence l'existence d'un retard pur tr :
Stn
n
mm
nre
SaSa
SbSb
S
KSH −
++++++=
...1
...1)(
1
11
(1.32)
St
i
n
i
i
m
i reSS
zSKSH −
+
=
=
−
−=
∏
∏
)(
)()(
1
1
1 (1.33)
La présence du terme st re − montre la présence d'un retard pur de valeur tr en
secondes.
VII.4.3. Définition
Un système ayant la fonction de transfert (1.32) Peut être décomposé en deux
systèmes ayant les fonctions de transfert :
nn
mm
n SaSa
SbSb
S
KSH
++++++=
...1
...1)(
1
111
(1.34)
Et st reSH −=)(2
H2 étant la fonction de transfert d'un retard pur si tr est positif.
Figure I.14 décomposition d’un système à retard pur
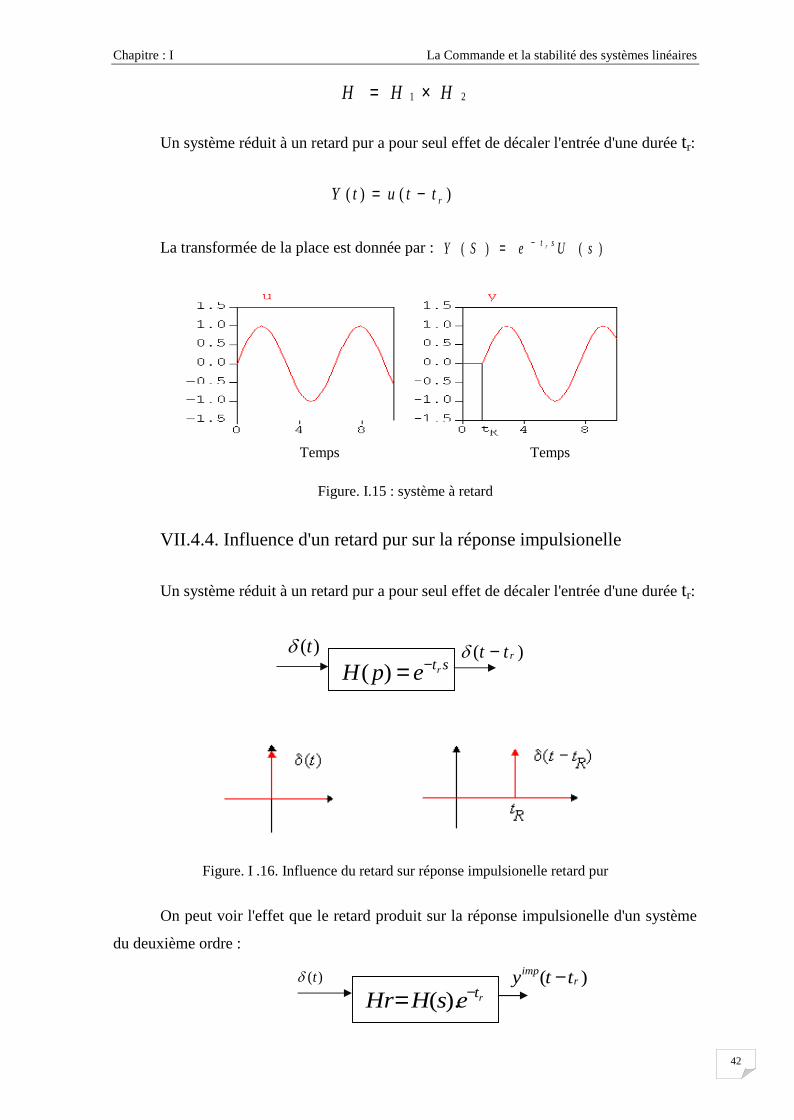
Chapitre : I La Commande et la stabilité des systèmes linéaires
42
21 HHH ×=
Un système réduit à un retard pur a pour seul effet de décaler l'entrée d'une durée tr:
)()( rttutY −=
La transformée de la place est donnée par : )()( sUeSY st r−=
Figure. I.15 : système à retard
VII.4.4. Influence d'un retard pur sur la réponse impulsionelle
Un système réduit à un retard pur a pour seul effet de décaler l'entrée d'une durée tr:
Figure. I .16. Influence du retard sur réponse impulsionelle retard pur
On peut voir l'effet que le retard produit sur la réponse impulsionelle d'un système
du deuxième ordre :
Temps Temps
strepH −=)()( rtt −)(t
)(t )( rimp tty −
rtesHHr −= ).(
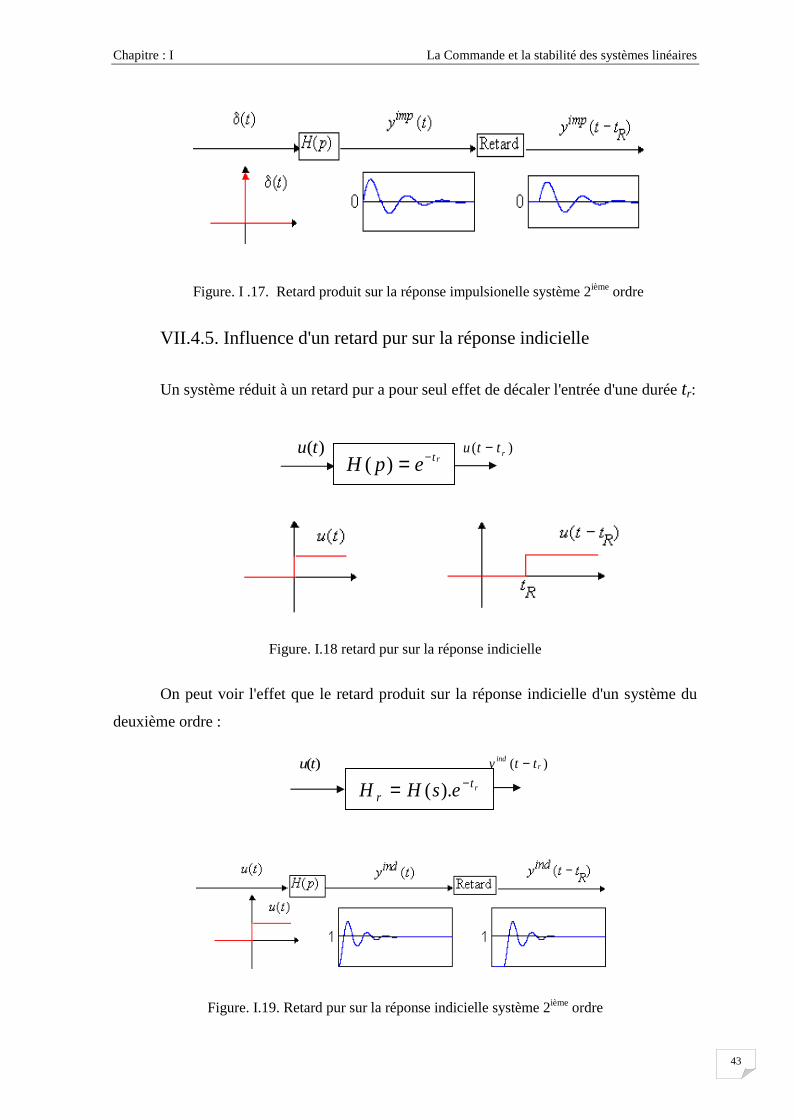
Chapitre : I La Commande et la stabilité des systèmes linéaires
43
Figure. I .17. Retard produit sur la réponse impulsionelle système 2ième ordre
VII.4.5. Influence d'un retard pur sur la réponse indicielle
Un système réduit à un retard pur a pour seul effet de décaler l'entrée d'une durée tr:
Figure. I.18 retard pur sur la réponse indicielle
On peut voir l'effet que le retard produit sur la réponse indicielle d'un système du
deuxième ordre :
Figure. I.19. Retard pur sur la réponse indicielle système 2ième ordre
)(tu )( rttu −rtepH −=)(
)( rind tty −)(tu
rtr esHH −= ).(
Chapitre : I La Commande et la stabilité des systèmes linéaires
44
VIII. Conclusion :
La commande linéaire est un sujet vaste et mûr avec une variété de méthodes
puissantes et d'une longue histoire des applications industrielles maîtrisables.
Le but d’une telle commande est de rendre un système perturbé : stable, précis et
rapide.
La synthèse des lois de commande performantes demandent une connaissance
précise du système à commander. Ou en peut représenter ce système par un modèle
mathématique issu des lois physiques.
Les performances d’un système dynamique doivent être bien définies pour faire une
analyse et une synthèse adéquates du système de commande [1].
La stabilité des systèmes est une caractéristique qualitative pour ramener les
déséquilibres de ces derniers vers un état plus stable, il existe plusieurs méthodes parmi
eux la stabilité au sens de Lyapunov qui permet de conclure la stabilité dynamique d’une
façon algébrique.
La théorie de Lyapunov peut être appliquée pour les systèmes linéaires que pour les
systèmes non linéaires. Il est intéressant d’interpréter sa signification en termes de
représentation d’état des systèmes linéaires.
Toute la difficulté est de trouver une fonction de Lyapunov V(x) dans le cas général
ou la matrice P dans le cas linéaire.
Dans notre étude le système linéaire exposé en simulation présente une stabilité
exponentielle avec un degré de stabilité α.
Les systèmes à retard permettent de représenter des phénomènes indésirables dans
la commande ou ces retards introduit dans les systèmes peuvent les déstabilisés et les
rendent instables. Tous les systèmes réels à régler possèdent un retard, chaque retard
introduit à l’entrée provoque un décalage sur la sortie est un disfonctionnement de la
commande qui n’arrive pas à temps ce qui provoque des perturbations non souhaité sur les
systèmes précis et qui nécessitent des commande en temps réels.
Chapitre : II Observateurs et observation des systèmes linéaires
46
Chapitre II
Observateurs et observation
des systèmes linéaires
I. Introduction :
Dans la commande des processus de nombreuses méthodes utilisent le principe du
retour d’état ou les seules grandeurs accessibles du système sont les variables d’entrée et
de sortie, et à partir de ces informations, on reconstruit l’état du modèle choisi pour
élaborer la commande.
La théorie d'observation d'état déterministe a été introduite dans les années soixante
(60) par Luenberger pour les systèmes linéaires. Kalman a également formulé un
observateur en considérant un système linéaire stochastique.
Sous l’hypothèse de linéarité du modèle du processus, la structure de base de
l’estimateur est toujours la même, mais sa réalisation dépendra du contexte choisi : continu
ou discret, déterministe ou stochastique.
Dans le cas où ce modèle est un modèle déterministe, le reconstructeur d’état sera
appelé observateur.
I.1. Commandabilité et observabilité
Préface :
Les concepts de Commandabilité et d’observabilité sont des concepts
fondamentaux pour l’étude des systèmes. Ils décrivent respectivement comment les états
d’un système sont influencés par les entrées et quelle information que les sorties mesurées
donnent sur les états du système.

Chapitre : II Observateurs et observation des systèmes linéaires
47
Par exemple, le fait de tourner le volant ou non d’une automobile ne va pas affecter
sa vitesse (la vitesse n’est pas commandable par le volant) alors que le fait de décélérer ne
va pas influencer la direction de la voiture. Ces définitions apparaissent pour la première
fois dans l’espace d’état par R.E. Kalman en 1960 [1].
Il faut noter que seulement les variables d'entrée et de sortie d'un système sont
directement observable (mesurable) et non ses variables d'état.
I.1.1. Commandabilité
Définition :
Un état ix est commandable en 0t s’il est possible de déterminer
][)( ,0 fi tttu ∈ conduisant tout état initial )( 0tx i vers 0 en fi ttt ≤≤0 .
Si cette propriété est vraie ∀ t0 et ∀ =i n1,... alors le Système est complètement
commandable [1].
Remarque :
- Si un système n’est pas complètement commandable alors pour certaines conditions
initiales il n’existe pas d’entrée de commande qui peut ramener le système à l’origine.
- La Commandabilité est une notion importante puisqu’on peut commander le
système afin de modifier son comportement (stabilisation d’un système instable,
modification des dynamiques propres). [1]
I.1.1.1. Critère de commandabilité :
La commandabilité est une propriété caractéristique du couplage entre l’entrée et la
sortie du système et fera donc intervenir les matrices A et B.
R.E.Kalman a propose un critère simple construit à partir de ces deux matrices.
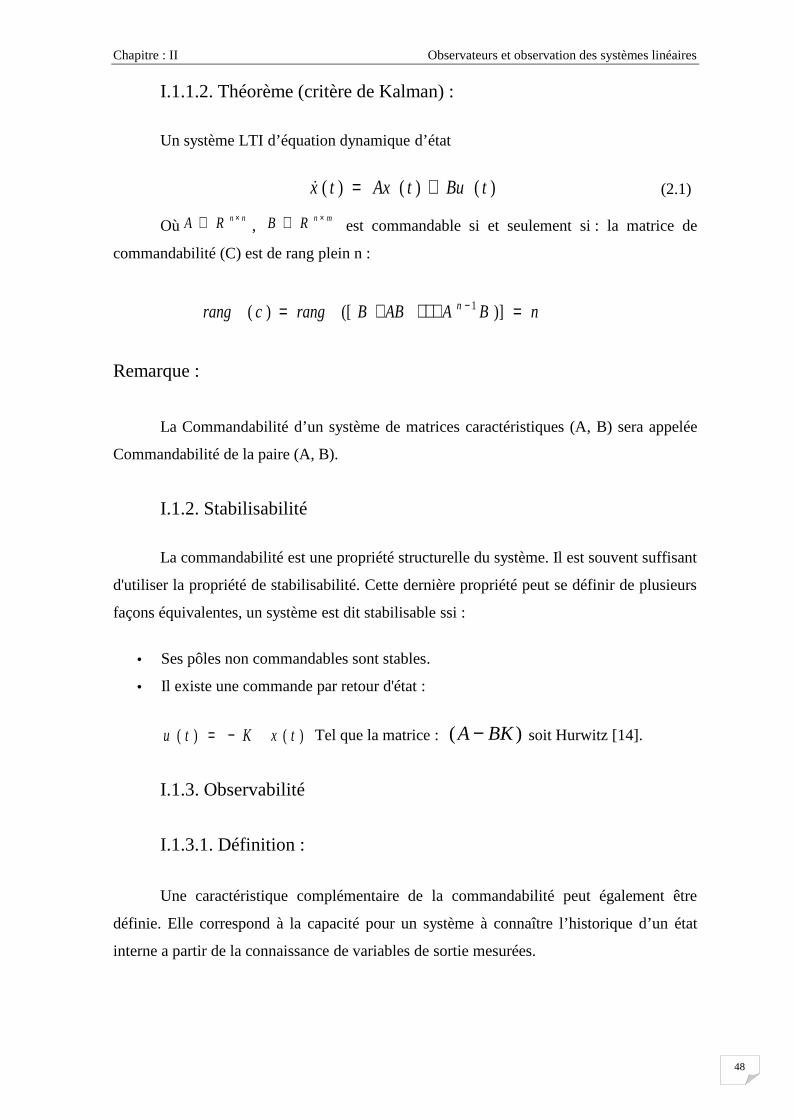
Chapitre : II Observateurs et observation des systèmes linéaires
48
I.1.1.2. Théorème (critère de Kalman) :
Un système LTI d’équation dynamique d’état
)()()( tButAxtx += (2.1)
OùnnRA ×∈ ,
mnRB ×∈ est commandable si et seulement si : la matrice de
commandabilité (C) est de rang plein n :
nBAABBrangcrang n =⋅⋅⋅⋅= − )]([)( 1
Remarque :
La Commandabilité d’un système de matrices caractéristiques (A, B) sera appelée
Commandabilité de la paire (A, B).
I.1.2. Stabilisabilité
La commandabilité est une propriété structurelle du système. Il est souvent suffisant
d'utiliser la propriété de stabilisabilité. Cette dernière propriété peut se définir de plusieurs
façons équivalentes, un système est dit stabilisable ssi :
• Ses pôles non commandables sont stables.
• Il existe une commande par retour d'état :
)()( txKtu −= Tel que la matrice : )( BKA − soit Hurwitz [14].
I.1.3. Observabilité
I.1.3.1. Définition :
Une caractéristique complémentaire de la commandabilité peut également être
définie. Elle correspond à la capacité pour un système à connaître l’historique d’un état
interne a partir de la connaissance de variables de sortie mesurées.

Chapitre : II Observateurs et observation des systèmes linéaires
49
I.1.3.2. Définition (observabilité) :
Un état ix est observable en 0t s’il est possible de déterminer )( 0txi
connaissant ]/[)( ,0 fttty .
Si cette propriété est vraie niett ⋅⋅⋅=∀∀ 1,0 alors le système est
complètement observable.
Remarque :
La notion d’observabilité est importante pour les systèmes où le vecteur d’état
complet n’est pas accessible à la mesure mais doit être reconstruit, estimé ou filtre a partir
des données fournies par la sortie.
I.1.3.1. Critère d’observabilité
Un critère de Kalman existe également pour la notion d’observabilité et fait
intervenir la matrice dynamique A et la matrice de sortie C.
I.1.3.2. Théorème (critère de Kalman) :
Un système LTI d’équations dynamique et de mesure
+=+=
•
)()()(
)()()(
tuDtxCty
tuBtxAtx (2.2)
nnRA ×∈ ,mnRB ×∈ est observable si et seulement si la matrice d’observabilité, O est
de rang plein n :
n
CA
CA
C
Orang
n
=
=−1
...
...)(

Chapitre : II Observateurs et observation des systèmes linéaires
50
Remarque :
- L’observabilité d’un système de matrices caractéristiques (A, C) sera appelée
observabilité de la paire (A, C).
- Un système à la fois commandable et observable est dit minimal.
I.1.4. Détectabilité
L'observabilité est une propriété du système. Il est souvent suffisant d'utiliser la
propriété de détectabilité. Cette dernière propriété peut se définir de plusieurs façons
équivalentes, un système est dit détectable ssi :
- Ses pôles non observables sont stables.
- Il existe une matrice de gain d'observateur d'état L tel que la matrice (A − LC)
soit Hurwitz.
II. Observateur d'état
En automatique un observateur d'état est une extension d'un modèle représenté sous
forme de représentation d'état.
Un observateur d’état (ou reconstructeur) est un filtre dont l’entrée est le vecteur
des mesures bruitées de sortie d’un système dynamique, ainsi que le vecteur de ses entrées.
La sortie de ce filtre est un vecteur proche du vecteur d’état du système.
La théorie de l'observateur d'état déterministe a été introduite par Luenberger pour
les systèmes linéaires. Pour les systèmes non linéaires, l'observation reste un domaine très
actif.
L'estimation de l'état se fait en recopiant de façon virtuelle la dynamique du
système en prenant en compte la commande u mais également les sorties du système (les
mesures) y dans le but de corriger les écarts éventuels.
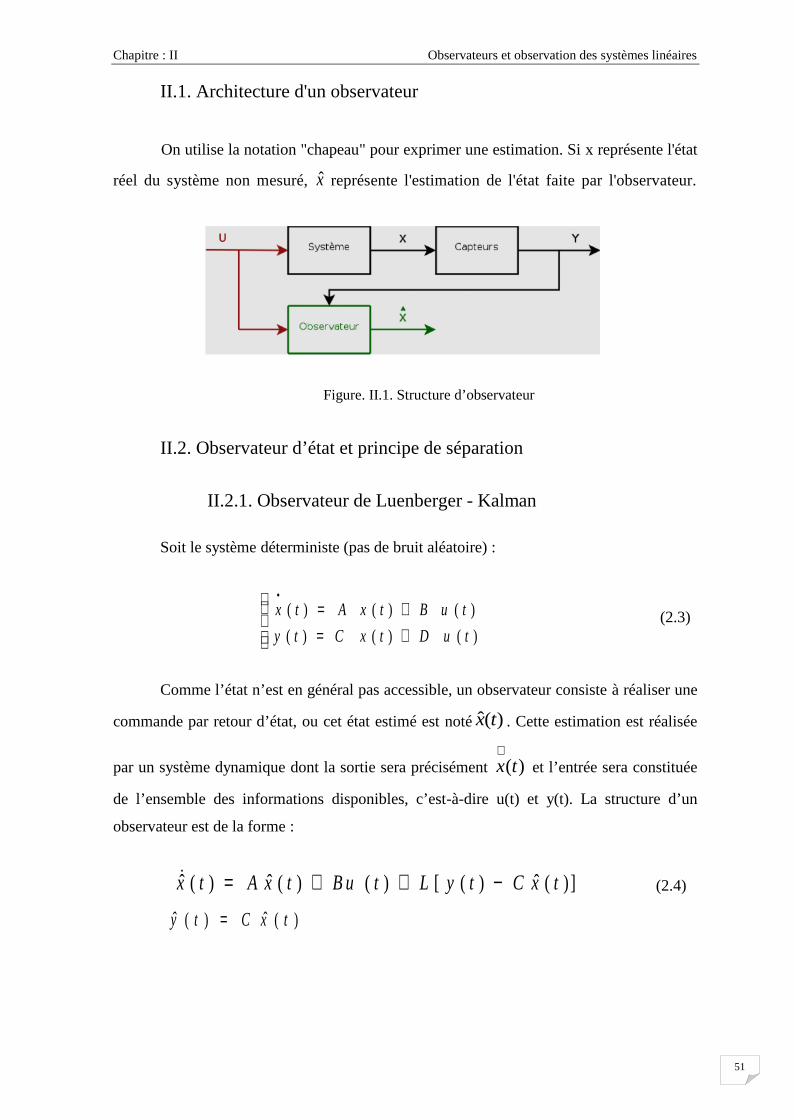
Chapitre : II Observateurs et observation des systèmes linéaires
51
II.1. Architecture d'un observateur
On utilise la notation "chapeau" pour exprimer une estimation. Si x représente l'état
réel du système non mesuré, x représente l'estimation de l'état faite par l'observateur.
Figure. II.1. Structure d’observateur
II.2. Observateur d’état et principe de séparation
II.2.1. Observateur de Luenberger - Kalman
Soit le système déterministe (pas de bruit aléatoire) :
+=+=
•
)()()(
)()()(
tuDtxCty
tuBtxAtx (2.3)
Comme l’état n’est en général pas accessible, un observateur consiste à réaliser une
commande par retour d’état, ou cet état estimé est noté )(ˆ tx . Cette estimation est réalisée
par un système dynamique dont la sortie sera précisément )(tx∧
et l’entrée sera constituée
de l’ensemble des informations disponibles, c’est-à-dire u(t) et y(t). La structure d’un
observateur est de la forme :
) ](ˆ)([)()(ˆ)(ˆ txCtyLtB utxAtx −++= (2.4)
)(ˆ)(ˆ txCty =
Chapitre : II Observateurs et observation des systèmes linéaires
51
II.1. Architecture d'un observateur
On utilise la notation "chapeau" pour exprimer une estimation. Si x représente l'état
réel du système non mesuré, x représente l'estimation de l'état faite par l'observateur.
Figure. II.1. Structure d’observateur
II.2. Observateur d’état et principe de séparation
II.2.1. Observateur de Luenberger - Kalman
Soit le système déterministe (pas de bruit aléatoire) :
+=+=
•
)()()(
)()()(
tuDtxCty
tuBtxAtx (2.3)
Comme l’état n’est en général pas accessible, un observateur consiste à réaliser une
commande par retour d’état, ou cet état estimé est noté )(ˆ tx . Cette estimation est réalisée
par un système dynamique dont la sortie sera précisément )(tx∧
et l’entrée sera constituée
de l’ensemble des informations disponibles, c’est-à-dire u(t) et y(t). La structure d’un
observateur est de la forme :
) ](ˆ)([)()(ˆ)(ˆ txCtyLtB utxAtx −++= (2.4)
)(ˆ)(ˆ txCty =
Chapitre : II Observateurs et observation des systèmes linéaires
51
II.1. Architecture d'un observateur
On utilise la notation "chapeau" pour exprimer une estimation. Si x représente l'état
réel du système non mesuré, x représente l'estimation de l'état faite par l'observateur.
Figure. II.1. Structure d’observateur
II.2. Observateur d’état et principe de séparation
II.2.1. Observateur de Luenberger - Kalman
Soit le système déterministe (pas de bruit aléatoire) :
+=+=
•
)()()(
)()()(
tuDtxCty
tuBtxAtx (2.3)
Comme l’état n’est en général pas accessible, un observateur consiste à réaliser une
commande par retour d’état, ou cet état estimé est noté )(ˆ tx . Cette estimation est réalisée
par un système dynamique dont la sortie sera précisément )(tx∧
et l’entrée sera constituée
de l’ensemble des informations disponibles, c’est-à-dire u(t) et y(t). La structure d’un
observateur est de la forme :
) ](ˆ)([)()(ˆ)(ˆ txCtyLtB utxAtx −++= (2.4)
)(ˆ)(ˆ txCty =
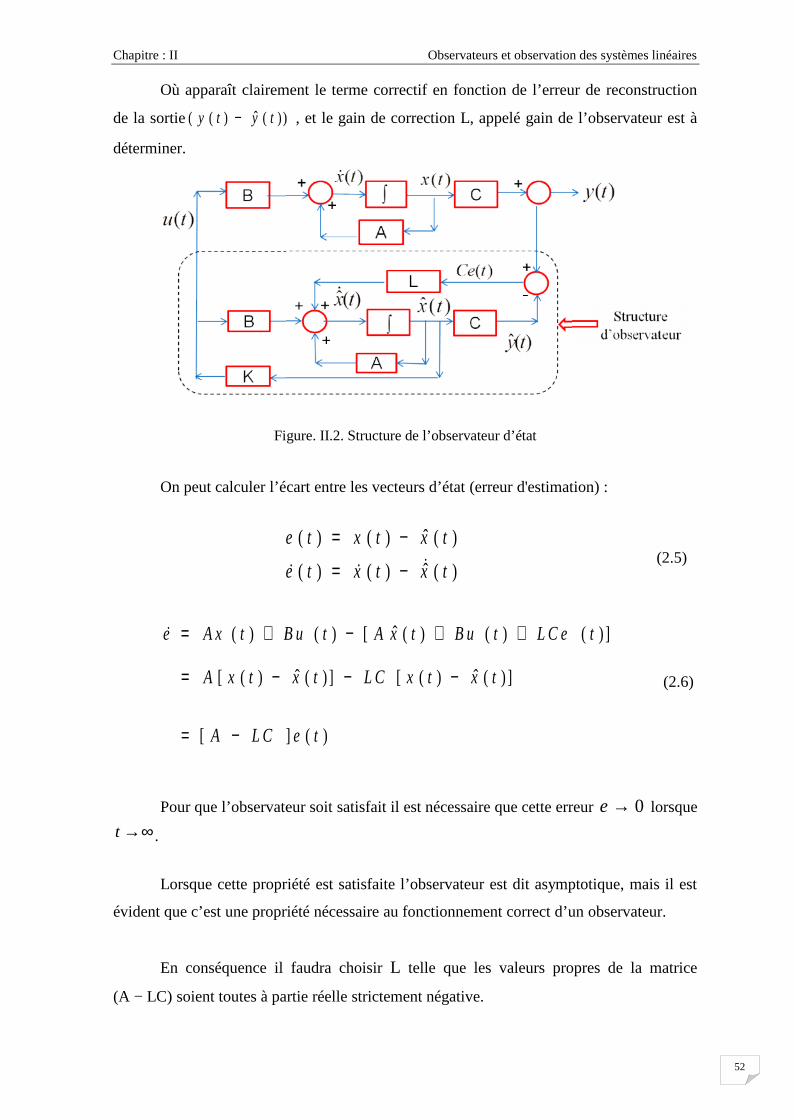
Chapitre : II Observateurs et observation des systèmes linéaires
52
Où apparaît clairement le terme correctif en fonction de l’erreur de reconstruction
de la sortie ) )(ˆ)(( tyty − , et le gain de correction L, appelé gain de l’observateur est à
déterminer.
Figure. II.2. Structure de l’observateur d’état
On peut calculer l’écart entre les vecteurs d’état (erreur d'estimation) :
)(ˆ)()(
)(ˆ)()(
txtxte
txtxte −=
−=(2.5)
)(][
) ](ˆ)([) ](ˆ)([
) ]()()(ˆ[)()(
teL CA
txtxL CtxtxA
tL C etB utxAtB utA xe
−=
−−−=
++−+=
(2.6)
Pour que l’observateur soit satisfait il est nécessaire que cette erreur 0→e lorsque
∞→t .
Lorsque cette propriété est satisfaite l’observateur est dit asymptotique, mais il est
évident que c’est une propriété nécessaire au fonctionnement correct d’un observateur.
En conséquence il faudra choisir L telle que les valeurs propres de la matrice
(A − LC) soient toutes à partie réelle strictement négative.
Chapitre : II Observateurs et observation des systèmes linéaires
52
Où apparaît clairement le terme correctif en fonction de l’erreur de reconstruction
de la sortie ) )(ˆ)(( tyty − , et le gain de correction L, appelé gain de l’observateur est à
déterminer.
Figure. II.2. Structure de l’observateur d’état
On peut calculer l’écart entre les vecteurs d’état (erreur d'estimation) :
)(ˆ)()(
)(ˆ)()(
txtxte
txtxte −=
−=(2.5)
)(][
) ](ˆ)([) ](ˆ)([
) ]()()(ˆ[)()(
teL CA
txtxL CtxtxA
tL C etB utxAtB utA xe
−=
−−−=
++−+=
(2.6)
Pour que l’observateur soit satisfait il est nécessaire que cette erreur 0→e lorsque
∞→t .
Lorsque cette propriété est satisfaite l’observateur est dit asymptotique, mais il est
évident que c’est une propriété nécessaire au fonctionnement correct d’un observateur.
En conséquence il faudra choisir L telle que les valeurs propres de la matrice
(A − LC) soient toutes à partie réelle strictement négative.
Chapitre : II Observateurs et observation des systèmes linéaires
52
Où apparaît clairement le terme correctif en fonction de l’erreur de reconstruction
de la sortie ) )(ˆ)(( tyty − , et le gain de correction L, appelé gain de l’observateur est à
déterminer.
Figure. II.2. Structure de l’observateur d’état
On peut calculer l’écart entre les vecteurs d’état (erreur d'estimation) :
)(ˆ)()(
)(ˆ)()(
txtxte
txtxte −=
−=(2.5)
)(][
) ](ˆ)([) ](ˆ)([
) ]()()(ˆ[)()(
teL CA
txtxL CtxtxA
tL C etB utxAtB utA xe
−=
−−−=
++−+=
(2.6)
Pour que l’observateur soit satisfait il est nécessaire que cette erreur 0→e lorsque
∞→t .
Lorsque cette propriété est satisfaite l’observateur est dit asymptotique, mais il est
évident que c’est une propriété nécessaire au fonctionnement correct d’un observateur.
En conséquence il faudra choisir L telle que les valeurs propres de la matrice
(A − LC) soient toutes à partie réelle strictement négative.

Chapitre : II Observateurs et observation des systèmes linéaires
53
Si les valeurs propres de (A – LC) sont toutes dans le demi-plan complexe gauche,
ce système est asymptotiquement stable et le vecteur d’erreur entre l’état x et l’état x tend
exponentiellement vers zéro.
On a construit un Observateur asymptotique : son état x tend exponentiellement
vers l’état x du système.
II.2.1. Théorème 1 :
Les valeurs propres de (A −LC) peuvent être fixées arbitrairement si et seulement si
la paire (A, C) est observable, (i.e. le rang = n).
III. Commande à base d’observateur
Le problème de l’Observateur asymptotique est donc résolu si l’on peut choisir une
matrice L qui permet de rendre (A – LC) asymptotiquement stable.
Pour réaliser une commande à retour de sortie, on peut donc utiliser un observateur
d’état.
Théorème 1 :
Pour qu’il existe un contrôleur a base d’observateur asymptotique qui stabilise
(C, A, B) il faut et il suffit que les modes instables (i.e. non asymptotiquement stables) de
A soient commandables et observables.
En pratique la synthèse d’un tel contrôleur s’effectue en deux étapes :
1- Synthèse d’un régulateur par retour d’état xKu ˆ−= on choisit K telque
(A-BK) soit asymptotiquement stable et assure certaines propriétés du système
bouclé.
2- Synthèse d’un observateur avec le gain L de façon à reconstruire l’état avec la
dynamique (A- LC) qui rend le système asymptotiquement stable.
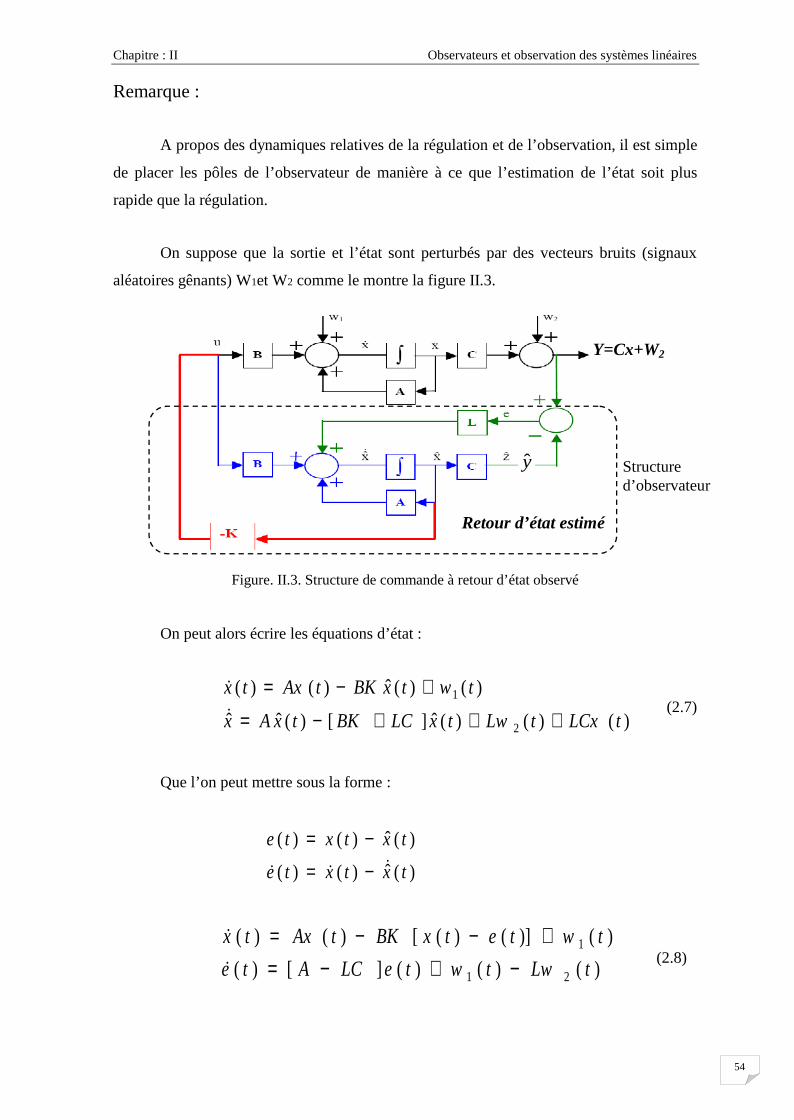
Chapitre : II Observateurs et observation des systèmes linéaires
54
Remarque :
A propos des dynamiques relatives de la régulation et de l’observation, il est simple
de placer les pôles de l’observateur de manière à ce que l’estimation de l’état soit plus
rapide que la régulation.
On suppose que la sortie et l’état sont perturbés par des vecteurs bruits (signaux
aléatoires gênants) W1et W2 comme le montre la figure II.3.
Figure. II.3. Structure de commande à retour d’état observé
On peut alors écrire les équations d’état :
)()()(ˆ][)(ˆˆ
)()(ˆ)()(
2
1
tLCxtLwtxLCBKtxAx
twtxBKtAxtx
+++−=
+−=
(2.7)
Que l’on peut mettre sous la forme :
)(ˆ)()(
)(ˆ)()(
txtxte
txtxte −=
−=
)()()(][)(
)()]()([)()(
21
1
tLwtwteLCAte
twtetxBKtAxtx
−+−=+−−=
(2.8)
Y=Cx+W2
y
Retour d’état estimé
Structured’observateur

Chapitre : II Observateurs et observation des systèmes linéaires
55
Ou encore :
−
+
−
−=
)(
)(0
)(
)(
0)(
)(
2
1
tW
tW
LI
I
te
tx
LCA
BKBKA
te
tx
(2.9)
La matrice d’évolution (2.9) est un bloc-triangulaire. Ses valeurs propres sont les
valeurs propres des blocs de la diagonale : [A−BK], [A−LC].
Les dynamiques du retour d’état d’une part, et de l’observateur d’autre part sont
séparées, on peut régler les valeurs propres de la commande par la matrice de retour d’état
K, de façon indépendante des valeurs propres de l’observateur que l’on règle par le choix
de la matrice L. C’est le principe de séparation.
Théorème 2 :
Pour qu’il existe un contrôleur à base d’observateur asymptotique qui stabilise (C,
A, B) il faut et il suffit que les modes instables (i.e. non asymptotiquement stables de A
soient commandables et observables).
En pratique, la synthèse ce fait exactement comme dans le cas précédent mais avec
la commande : vKxu +−= on choisit K telle que (A-BK) soit asymptotiquement
stable et assure certaines propriétés du système bouclé. Avec le choix de L de façon à
reconstruire l’état avec la dynamique (A-LC).
III.1. Observateurs des systèmes linéaires :
III.1.1. Modèle analytique
Les modèles analytiques sont une représentation mathématique de la loi d'évolution
des variables physiques du système. Le système est décrit par un ensemble d'équations
données par des lois générales. Par exemple, le modèle couramment utilisé est le modèle
d'état linéaire dans le domaine temporel dans lequel :

Chapitre : II Observateurs et observation des systèmes linéaires
56
Une solution simple et optimale au problème de l’estimation de l’état des systèmes
linéaires été proposée par Luenberger [16] dans le cadre des systèmes déterministe, et par
Kalman [15] dans le cadre stochastique.
Dans les deux cas, on considère le modèle dynamique d’un système linéaire défini
comme suit :
+=++=
)()()(
)()()()(
tvtCxty
twtButAxtx(2.10)
Où 0,>t nRtx ∈)( , mRtu ∈)( , pRty ∈)(
-rRtw ∈)( , et
pRtv ∈)( sont deux bruits blancs gaussiens d’espérance nulle,
de covariances respectives Q et R. Ces bruits sont supposés non corrélés.
Les matrices du système sont de dimensions appropriées, et les conditions initiales
sont définies par x(0) = x0.
- )(tx : le vecteur d’état, )(tu : le vecteur d’entrée, y(t) : le vecteur de sortie ; sont
reliés par l'intermédiaire des matrices A, B, C.
Les procédés ainsi modélisés ne suivent pas toujours une telle représentation. Les
principaux aspects à prendre en compte afin de minimiser les erreurs de modélisation sont
les suivantes :
- incertitudes sur les paramètres du modèle
- modifications de structures du système
- non-linéarités
- perturbations subies par le système
- bruits affectant les mesures.

Chapitre : II Observateurs et observation des systèmes linéaires
57
III.2 .Observateur asymptotique
Les données sont (y(t), u(t)) et le modèle BuAxx += , )()( tCxty = , l’inconnu
est x.
Peut-on choisir la matrice L de façon à ce que la solution x du système Converge
vers x ?
xCyavecxCtyLtBuxAtx ˆˆ),ˆ)(()(ˆ)(ˆ =−++=
Comme )()( tCxty = , peut-on ajuster la matrice L de façon à obtenir une
équation différentielle d’erreur xxe ˆ−= stable :
eLCAdt
de)( −= ;
Or (A, C) observable équivaut à (AT, CT) commandable.
III.3. Observateur de Luenberger
La théorie de l’observation de Luenberger repose essentiellement sur des
techniques de placement de pôles. On se place dans le cas déterministe, i.e. les bruits w et
v sont nuls, et Luenberger propose l’observateur suivant pour le système (2.3) :
))(ˆ)(()()(ˆ)(ˆ txCtyKtButxAtx −++= (2.11)
La dynamique de l’erreur d’estimation ))(ˆ)(()( txtxte −= a pour expression :
)()()( teKCAte −= (2.12)
En utilisant une technique de placement de pôles, il suffit alors de choisir le gain K
de l’observateur de telle sorte que les valeurs propres de la matrice (A – KC) soient dans le
demi-plan complexe gauche [17].

Chapitre : II Observateurs et observation des systèmes linéaires
58
Remarque :
En présence de bruits w, v, la dynamique de l’erreur est régie par l’équation :
)()()()()( tKvtLWteKCAte −+−= (2.13)
Cette erreur est donc sensible aux bruits par l’intermédiaire des deux fonctions de
transfert :
KxCKCASILeKCASI 11 ˆ)()( −− −+−++−
Du gain fréquentiel permet de quantifier l’influence des bruits sur e(t).
III.4. Observateur de Kalman
Soit le système linéaire suivant :
=+=
)()(
)()()(
tCxty
tButAxtx
Un observateur dynamique a la forme suivante :
=−++=
)(ˆ)(
)ˆ()()(ˆ)(ˆtxCty
yyLtButxAtx
(2.14)
L'évolution de l'état est corrigée grâce au modèle en fonction de l'écart constaté
entre la sortie mesurée et la sortie reconstruite par l'observateur : )ˆ( yy − .
On peut réécrire l'observateur de la manière suivante :
LyBuxLCAx ++−= ˆ)( (2.15)
On vérifie bien que l'observateur reconstruit l'état x en fonction de la commande u
et des mesures y.
La matrice L est appelée matrice de gain et doit être choisie de manière à ce que
l'erreur sur l'état converge exponentiellement vers 0, soit :
0)(~ →−= XXX
.

Chapitre : II Observateurs et observation des systèmes linéaires
59
Pour cela, il suffit de choisir L telle que la matrice (A-LC) soit une matrice
Hurwitz, c’est-à-dire que ses valeurs propres soient à parties réelles négatives dans le cas
continu ou possèdent un module inférieur à 1 dans le cas discret.
IV. Commande par retour d'état reconstruit par un observateur de Kalman
L'observateur linéaire de Kalman-Luenberger possède une caractéristique
intéressante connue sous le nom de principe de séparation : dans le cas d'une commande
linéaire par retour d'état, les travaux de synthèse de commande et d'observateur peuvent se
faire de façon indépendante.
En effet, si le système commandé est stable, et si l'observateur ainsi conçu est stable
(i.e. les matrices (A − BK) et (A − LC) sont Hurwitz)
Alors le système commandé par retour d'état reconstruit est stable.
En effet, considérons le système linéaire invariant suivant, observable et
commandable, muni d'un observateur de Kalman - Luenberger :
=−++=
)(ˆ)()ˆ()()(ˆ)(ˆ
txCtyyyLtButxAtx
En réalisant un bouclage par retour d’état xKu ˆ−= , la dynamique du
système bouclé s'écrit alors :
xLCxBKAtx
xCyLxBKAtx
xBKAxtx
~ˆ)()(ˆ)ˆ(ˆ)()(ˆ
ˆ)(
+−=
−+−=
−=
On peut faire le changement de variable suivant, pour écrire l'erreur de
reconstruction :
)ˆ(~ xxx −= d’où en remplaçant, XLCAX~
)(~ −=

Chapitre : II Observateurs et observation des systèmes linéaires
60
En écrivant un nouveau système augmenté, constitué de l'état et de l'erreur de
reconstruction, on obtient :
−
−−=
X
X
LCA
BKBKA
x
x~
0~
Cette matrice est triangulaire par blocs, Ainsi la synthèse d'un système commandé
par un retour d'état reconstruit par un observateur est particulièrement simple pour les
systèmes linéaires invariants, puisque on peut synthétiser les deux fonctions séparément.
Figure. II.4.La synthèse d'un système commandé par retour d'état reconstruit par un observateur
Remarque :
- Pour le placement de pôles, on a tout intérêt à ce que l'observateur soit plus rapide
que le système dynamique, de façon à ce qu'il puisse poursuivre le système en
question.
- Du fait de sa nature dynamique (intégration des signaux de mesure) l'observateur est
également utilisé en traitement du signal pour filtrer des mesures. C'est dans ce
contexte que Kalman à publié le filtre qui porte désormais son nom.
- Une commande fondée sur un retour d'état reconstruit n'est pas robuste aux erreurs
de modélisation. Donc la précision de l'état reconstruit dépend de la pertinence du
modèle utilisé.

Chapitre : II Observateurs et observation des systèmes linéaires
61
IV .1. Filtre de Kalman
Le filtre de Kalman est un filtre à réponse impulsionelle infinie qui estime les états
d'un système dynamique à partir d'une série de mesures incomplètes ou bruitées.
IV.1.1. Exemples d'applications
Le filtre de Kalman est utilisé dans une large gamme de domaines technologiques
(radar, vision électronique, communication ...). C'est un thème majeur de l'automatique et
du traitement du signal.
Par exemple, pour le cas des radars où l'on désire suivre une cible, des données sur
sa position, sa vitesse et son accélération sont mesurées à chaque instant mais avec
énormément de perturbations dues au bruit ou aux erreurs de mesure.
Le filtre de Kalman est aussi de plus en plus utilisé en dehors du domaine du
traitement du signal, par exemple en météorologie, en finance ou en navigation et il est
même utilisé dans l'estimation des états de trafic routier.
IV.1.2. Paternité
Le Filtre de Kalman doit son nom à Rudolf Kalman. Le filtre a été décrit dans
diverses publications par Swerling (1958), Kalman ( 1960) et Kalman-Bucy ( 1961).
Une grande variété de filtres de Kalman a été, développée à partir de la formulation
originale dite Filtre de Kalman (KF) simple. Schmidt développa le filtre de Kalman étendu,
Bierman, Thornton et bien d'autres développèrent toute une gamme de filtres.
Le filtre le plus utilisé est vraisemblablement la phase-locked loop, largement
répandue dans les radios, ordinateurs, équipement de communication, etc.

Chapitre : II Observateurs et observation des systèmes linéaires
62
IV.2. Conception du filtre de KALMAN (FK)
Le filtre de Kalman est un estimateur récursif. Cela signifie que pour estimer l'état
courant, seuls l'état précédent et les mesures actuelles sont nécessaires. L'historique des
observations et des estimations n'est ainsi pas requis.
La théorie de l’observation de Kalman [17] nécessite, la résolution d’une équation
de Riccati. Il propose la structure d’observateur suivante :
))(ˆ)()(()()(ˆˆ txCtytKtuBtxAx −++= (1.16)
En minimisant la matrice de covariance de l’erreur d’estimation :
])().([)( TteteEtP =
On obtient l’expression du gain de l’observateur :
1)()( −= RCtPtK T (1.17)
Où )(tP est la solution de l’équation de Riccati : (c.-à-d. : 0=P ) :
11 )(ˆ)()(ˆ −− +−−+= LQLtXCCPRCtPPAtAPP tt(1.18)
Sous certaines conditions, on peut montrer que la matrice P(t) tend vers une limite
et que le filtre est stable, ce qui permet éventuellement de conserver pour K sa valeur en
régime permanent.
V. Observation des systèmes à retards
V.1. Introduction :
Il est souvent difficile de commander un système en utilisant seulement les sorties
mesurables de celui-ci. De plus, il est légitime de penser que plus on dispose d'information
sur l'état d'un système, plus la construction d'une loi de commande sera aisée.
Chapitre : II Observateurs et observation des systèmes linéaires
63
Le problème de l'observation consiste à construire une estimation de l'état qui sera
utilisée par le contrôleur pour calculer la nouvelle commande.
En pratique très peu de systèmes sont soumis à des retards constants. Plusieurs
auteurs ont abordé l'observation des systèmes à retards [29] mais, le plus souvent, l'écriture
de l'observateur fait intervenir la valeur du retard.
En d'autres termes, la connaissance ou la mesure du retard est requise. Dans le
cadre d'applications réelles (commande télé-opérée, systèmes en réseau par exemple), les
hypothèses de connaissance du retard sont peu réalistes et proviennent des limites des
techniques d'identification et d'analyse disponibles.
V.2. Observation de systèmes à retards connus
Dans le cadre de la synthèse d'observateur pour système à retard, on retrouve
beaucoup de travaux consacrés aux systèmes à retards connus, aussi bien constants [29],
des techniques de construction d'observateurs de Luenberger pour des systèmes à retards
sont discuter ici.
Les matrices définissant les dynamiques du système étudie sont supposées connues.
V.3. Retard connu sur l'état et la sortie
Soit le système linéaire à retards sur l'état et la sortie :
)),(()()( 1 ttxAtAxtx −+=
)),(()()( 2 ttxCtCxty −+=
],0,[),()( −∈∀= xt(3.40)
OùnRx ∈ représente l'état du système,
pRy ∈ est la sortie (qu'on suppose
être égale à la mesure). Les matricesnnRA ×∈ ,
nnRA ×∈ etnpRCC ×∈,

Chapitre : II Observateurs et observation des systèmes linéaires
64
sont des matrices réelles supposées connues. Nous supposerons que la paire (A, C) est
observable.
On note : )(max 22,1 ii == . Les retards sont supposes bornés et
vérifient les conditions suivantes :
,)(),()(,],[ 2,1 iiiiiiii ttttet ≤+=∀∈
Nous supposons ici que les retards 1 sur l'état, et 2 sur la sortie, sont connus au
niveau de l'observateur. On définit alors l'observateur de Luenberger adapte au cas des
systèmes à retards sur la sortie :
−+=−−−−−+=
))((ˆ)(ˆ)(ˆ))),((ˆ))((())(()(ˆ)(ˆ
2
221
ttxCtxCty
ttyttyLttxAtxAtx
(3.41)
On définit alors l'erreur d'observation : ),(ˆ)()( txtxte −=La dynamique de cette erreur est alors régie par l'équation différentielle à retard :
)),(())(()()()( 21 ttLCetteAteLCAte −−−++=
(3.42)
VI. Conclusion
Ce chapitre a été consacré d’une part à quelques rappels sur des concepts relatifs à
la Commandabilité, l’observabilité (rappels sur quelques définitions sur la notion
d’observabilité et formulation du principe d’estimation d’état).
D’autre part, nous avons présenté un état de l’art qui regroupe la plupart des
techniques de conception d’observateurs pour les systèmes linéaires (Observateur de
Luenberger, Kalman...).
Chapitre : II Observateurs et observation des systèmes linéaires
65
Ce chapitre présente l’utilité de la commande à base d’observateur en retour d’état
estimé ou en va l’utilisée dans notre application comme (observateur linéaire).
Le problème de l’observation des systèmes linéaires est donc résolu avec une
variété de techniques. Ce qui donne un grand choix d’utilisation.
Le filtre de Kalman fait appel à la dynamique du système qui définit son évolution
dans le temps pour obtenir de meilleures données, éliminant ainsi l'effet du bruit telque le
cas dans le traitement de signale.
L’observateur linéaire utilisé dans la commande ou en peut pat mesuré les états par
des capteurs ou dans le cas où la mesure est difficile ou couteuse, dans notre cas pour
mesuré les états et les utilisées dans la commande à travers le réseau de communication
internet pour assurer une commande plus stable vu les retards introduits due à
l’échantillonnage (commande, mesure) et la communication.
Ces données peuvent être calculées pour l'instant présent (filtrage), dans le passé
(lissage), ou sur un horizon futur (prédiction).
La mesure du retard est nécessaire pour les systèmes en temps réel où ces retards
influent sur la commande. Peut de retards sont constants et leurs connaissance est limité
par les techniques d'identification et d'analyse disponibles.
Des techniques de construction d'observateurs de Luenberger pour des systèmes à
retards sont introduits dans notre travail a fin de commandé le système linéaire à retard. Et
de minimisé les erreurs issues de ses retards.

Chapitre III Commande des Systèmes Non-linéaires
66
Chapitre III
La commande des systèmesnon-linéaires
I. Introduction :
Le thème de conception de la commande non-linéaire est une opération qui a attiré une
attention particulière en raison de l'apparition des microprocesseurs.
Au cours des dernières décennies, une importante recherche en automatique s’est
intéressé sur le problème de l’observation de l’état des systèmes dynamiques non linéaires.
Ceci est motivé par le fait que l’estimation de l’état est une étape importante pour la synthèse
de lois de commande, le diagnostic et la supervision des systèmes industriels [19].
Récemment, d’autres applications telles que la synchronisation et le décryptage dans
les systèmes de communication, sont devenues l’un des secteurs de recherche les plus
dynamiques.
Comme la plupart des systèmes physiques sont non linéaires et certains phénomènes
non linéaires sont si sensibles aux conditions initiales, bien qu’étant régis par des lois
rigoureuses et parfaitement déterministes, que toute prévision de leur comportement est
impossible [18].
I.1. Pourquoi la commande non linéaire ?
Sachant que La commande linéaire est un sujet maitrisable avec une variété de
méthodes puissantes, il est normal qu’on pose la question pourquoi les chercheurs et les
concepteurs, de larges secteurs tels que la commande d'avion et de vaisseau spatial, la
robotique, la régulation des processus, et technologie biomédicale, ont montré un intérêt actif
Chapitre III Commande des Systèmes Non-linéaires
67
pour les applications des méthodes non-linéaires de commande ?. Les raisons peuvent être
citées comme suit :
• Amélioration des systèmes de commande existants : quand la gamme exige des
opérations étendues, le contrôleur linéaire est susceptible d'être instable, parce que les non-
linéarités dans le système ne peuvent pas être correctement compensées [20].
• Analyse des non-linéarités lourde : dans les systèmes de commande il y a beaucoup
de non-linéarités dont la nature discontinue ne permet pas l'approximation linéaire. Ces
phénomène de non-linéarités lourde incluent les frottements, la saturation, les zones mortes,
l’hystérésis et sont souvent trouvées dans l'automatique.
• Traiter l’incertitude des modèles : dans la conception des contrôleurs linéaires, il est
habituellement nécessaire de supposer que les paramètres du modèle de système sont connus.
Alors, beaucoup de problèmes de commande impliquent des incertitudes dans ces paramètres.
Ceci peut être dû à un temps de variation lent des paramètres (par exemple, de la pression
atmosphérique ambiante pendant un vol d'avion), ou d'un changement brusque des paramètres
(par exemple, dans les paramètres d’inertie d'un robot quand un nouvel objet est saisi) [20].
Il peut y avoir d'autres raisons d'employer des techniques non-linéaires de commande,
telles que le coût et l'optimalité d'exécution dans les arrangements industriels.
I.2. Qu’est-ce qu’un système non linéaire commandé
Un système non-linéaire commandé est un ensemble d’équations mathématiques non
linéaires (lois de commandes), (différentielles par exemple) qui décrivent l’évolution
temporelle des variables du système sous l’action d’un nombre fini de variables des entrées
ou de commande, que l’on peut choisir librement pour réaliser certains objectifs [21].
On peut citer par exemples parmi les systèmes mécaniques ou chimiques: satellites,
avions, automobiles, grues, machines-outils, régulateurs thermiques, réacteurs chimiques,
procédés biotechnologiques ou agro-alimentaires, etc.
Chapitre III Commande des Systèmes Non-linéaires
68
Les entrées peuvent être choisies en boucle ouverte, c’est-à-dire ne dépendant que du
temps, ou en boucle fermée, c’est-à-dire comme des fonctions des variables mesurées,
appelées observations, qui rendent compte de l’état du système à chaque instant.
Un tel système est non linéaire s’il n’est pas équivalent à un système linéaire dans un
sens à préciser. D’après le théorème de la superposition des systèmes linéaires on peut dire
que le système qui n’obéit plus au principe de superposition est un système non-linéaire [22].
Habituellement on cherche a linéarisé le système non-linéaire ; en d'autres termes, pour
essayer d'éviter l’aspect non linéaire du problème.
Dans de nombreux cas, le nombre, la technologie et l’emplacement des capteurs devant
permettre de fermer la boucle ne sont pas donnés a priori et entrent dans la conception de la
boucle fermée.
Les techniques des systèmes non-linéaires ne sont pas considérées comme un effort
difficile, ils sont regardés comme des problèmes complexes [23].
II. Introduction a la Commande Non-Linéaire :
Pour commander un modèle dynamique, il ne s’agit pas de reproduire avec précision
les phénomènes, mais de prévoir, avec peu de variables, l’évolution du système dans l’échelle
de temps ou est censée agir la commande; il faut noté que les erreurs et les dynamiques
négligées ou les perturbations non modélisées doivent être compensées ou atténuées grâce à la
commande en boucle fermée, qui utilise l’observation sur les écarts successifs dans la
trajectoire a suivre pour les compenser [21].
Il est donc important de maîtriser les interactions entre la complexité du modèle choisi
pour représenter les phénomènes et la conception et les performances de lois de
commande[21].
Deux visions des systèmes sont observées :
- leurs complexités par rapport au linéaire
- les possibilités qu’ils offrent pour l’analyse et la conception des lois de commande.

Chapitre III Commande des Systèmes Non-linéaires
69
On peut distinguer plusieurs sortes de lois de commande en boucle fermée : les
bouclages d’état qui supposent que l’état complet est mesuré ou estimé, et les bouclages de
sortie qui n’utilisent que les informations venant de certaines sorties.
Dans tous les cas, ces bouclages peuvent être statiques, c’est-à-dire que la commande
est calculée en utilisant directement les informations sur l’état, ou dynamiques, c’est-à-dire :
des calculs d’intégrales de fonctions des variables d’état sont nécessaires pour calculer la
commande.
II.1. Commandes non linéaires
Ce type de commande (linéarisation exacte entrée-états ou entrée-sortie) a fait son
apparition dans les années 1980 avec les travaux d'Isidori [25] et les apports de la géométrie
différentielle. Un grand nombre de systèmes non linéaires peuvent être partiellement ou
complètement transformés en systèmes possédant un comportement entrée-sortie ou entrée-
état linéaire à travers le choix approprié d'une loi de commande.
Après linéarisation, les techniques classiques du linéaire peuvent être appliquées. Cette
approche a souvent été employée pour résoudre des problèmes pratiques de commande mais
cette technique impose que le vecteur d'état soit mesuré et demande un modèle précis du
procédé à commander. De plus, les propriétés de robustesse ne sont pas garanties face aux
incertitudes paramétriques du modèle. En effet, cette technique est basée sur l'annulation
exacte des termes non linéaires. Par conséquent, la présence d'incertitudes de modélisation sur
les termes non linéaires rend l'annulation inexacte et l'équation entrée-sortie résultante non
linéaire à ce problème [25]. La commande linéarisante a fait l'objet de plusieurs applications.
Plus récemment, la technique du backstepping (commande stabilisante non linéaire) a
fait son apparition dans les années 1990. La commande non linéaire avec linéarisation entrée-
états ou entrée-sortie mène à l'annulation de non-linéarités qui pourraient être utiles.
Le backstepping n'oblige pas forcément le système à devenir linéaire. L'idée
fondamentale du backstepping est de synthétiser la loi de commande d'une manière récursive.
Les imprécisions du modèle proviennent des incertitudes liées au procédé lui-même
(paramètres mal connus ou difficilement identifiables) ou de l'oubli de certaines dynamiques
Chapitre III Commande des Systèmes Non-linéaires
70
du système ou même du choix de modélisation trop simplifié de certaines dynamiques. Les
imprécisions sont classées en deux catégories :
- Incertitudes paramétriques
- Dynamiques négligées.
Le premier type entrera directement en jeu dans le modèle tandis que le second type
porte sur l'ordre sous-estimé du système. La commande robuste est une première technique de
commande de l'automatique traitant ce genre de problème. Parmi les différentes techniques, la
commande par modes de glissement (Sliding Mode Control) est une technique
particulièrement intéressante. Elle remonte dans les années 1970 avec les travaux d'Utkin [24].
II.2. Systèmes non linéaires
La forme la plus générale d'une représentation d'état est composée de deux fonctions:
==
))(),(,()(
))(),(,()(
tutxthty
tutxtftx(3.1)
x est toujours appelé le vecteur d'état, y vecteur de sortie et u vecteur d'entré. Le
vecteur x évolue généralement dans un sous espace nRj ∈ .
La première équation représente l'équation d'évolution et la seconde c’est l'observation.
La représentation d'état linéaire décrite préalablement est un cas particulier de cette forme si
les fonctions f et h sont linéaires (on représente alors les fonctions sous forme matricielle).
II.3. Multiplicité de la représentation d'état
De la même façon que pour la représentation d'état des systèmes linéaires, la
représentation d'état des systèmes non linéaires n'est pas unique. En effet, considérons le
changement de variable :
)( xZ = , avec un difféomorphisme denR dans
nR

Chapitre III Commande des Systèmes Non-linéaires
71
On remarque : xZzx
)(1−=
∂∂=
, que l'on note : x
∂∂
par la suite.
D’où : ))(),(,( tutxtfz
∂∂= (3.2)
On peut alors réécrire notre système en tenant compte du changement d'état :
))(),(,(
))(),(,(
1
1
tuzthy
tuztfz
−
−
=∂∂=
(3.3)
II.3.1. Exemple du pendule
L'exemple classique de système non linéaire est un pendule libre (il n'y a pas d'entrées,
le pendule est livré à lui-même).
L'équation différentielle régissant le pendule est la suivante :
))()(sin)( tkltmgtml −−=
Où :
- θ(t) est l'angle du pendule
- m est la masse du pendule (la masse de la tige est négligée)
- g est l'accélération gravitationnelle
- k est le coefficient de frottement au point de pivot
- l est le rayon du pendule (jusqu'au centre de gravité de la masse m)
Les équations d'état sont :
)(sin)(sin)( 212 txm
ktx
l
gtx −−=

Chapitre III Commande des Systèmes Non-linéaires
72
Ou :
penduleduangulaireonaccélératil'est)()(
penduleduangulaire vitesselaest)()(
penduleduanglel'est)(
21
21
1
==
==
=
txtx
txtx
tx
L'équation d'état peut être écrite ainsi :
−−==
=
)()(sin
)())(,(
)(
)()(
21
2
2
1
txm
ktx
l
gtx
txtftx
txtx
Les points d'équilibre stationnaires d'un système sont définis par les points où 0=x .
Dans ce cas, les points qui satisfont ce critère pour le pendule sont :
=
0)(
)(2
1 ntxtx Pour tout n entier.
II.4. Introduction aux systèmes dynamiques
II.4.1. Point d’équilibre
Par définition, l’analyse de la stabilité d’un système consiste à étudier son
comportement lorsqu’il est déplacé d’un point d’équilibre. [26]
On considère le système différentiel :
)( xfx = (3.4)
Sur une variété x de classe ∞c et de dimension n, f étant un champ de vecteurs ∞
cL’équation (3.4) est dite stationnaire pour exprimer que la vitesse f(x) en tout point x
ne dépend pas de l’instant t de passage.
Chapitre III Commande des Systèmes Non-linéaires
73
Le cas des équations différentielles dites instationnaires, c’est-à-dire ou f dépend du
temps :
00 )(),()(
xtxtxftx
==
(3.5)
On s’intéresse maintenant aux phénomènes dits asymptotiques c’est-à-dire faisant
intervenir des ensembles de temps non bornés.
Un point singulier (ou point d’équilibre ou régime permanent) du champ f ou, par
extension, du système (3.1), est un point−x :
Telque : 0)( =−xf (3.6)
III. Stabilité des systèmes dynamiques : Stabilité de Lyapunov
La notion de stabilité d’un système dynamique caractérise le comportement de ses
trajectoires autour des points d’équilibre. L’analyse de la stabilité d’un système dynamique
permet donc d’étudier l’évolution de sa trajectoire d’état lorsque l’état initial est proche d’un
point d’équilibre.
La stabilité au sens de Lyapunov est une théorie générale valable pour toute équation
différentielle.
Cette notion signifie que la solution d’une équation différentielle initialisée au
voisinage d’un point d’équilibre reste suffisamment proche.
III.1. Stabilité des systèmes à temps continu :
Considérons la classe des systèmes non linéaires décrits par l’équation dynamique :
00 )(),),(()( xtxttxftx == (3.7)
Où nRtx ∈)( et nn RRRf →× +: continue. Nous désignons par exemple un point
d’équilibre de (3.5) tel que :
0,0),( tttxf e ≥∀=

Chapitre III Commande des Systèmes Non-linéaires
74
Et par ),,( 00 xttx la solution à l’instant 0tt ≥ du système (3.5) initialisée en x0 à
l’instant t0.
Comme ce qui nous concerne c’est la stabilité de l’erreur d’estimation, alors nous
supposons que le système (3.5) possède un unique point d’équilibre xe = 0. Ce qui mène aux
définitions de la stabilité du système (3.5) autour de l’origine.
III .1.1. Définition (Stabilité):
L’origine est un point d’équilibre stable au sens de Lyapunov pour le système (3.5), si :
0,0> ≥∀∀ t , il existe un scalaire positif ),( 0t tel que :
00000 ,<),,(),(< ttxttxtx ≥∀⇒ . (3.8)
On dit que l’origine est instable dans le cas contraire.
III.1.2. Définition (Stabilité uniforme):
L’origine est un point d’équilibre uniformément stable pour (3.5) si ∀ ε > 0, il existe
un scalaire positif δ(ε) tel que :
0000 ,<,,()(< ttxttxx ≥∀⇒ . (3.9)
III.1.3. Définition (Attractivité) :
L’origine est un point d’équilibre attractif pour (3.5) si 0>, ∀ , il existe un scalaire
positif )( 0t tel que :
00000 ,0)),,((lim)(< ttxttxtxt
≥∀=⇒∞→
(3.10)
Lorsque : +∞=)( 0t , on dit que l’origine est globalement attractive.
La notion d’attractivité signifie que, après un certains temps et de possibles déviations,
toute trajectoire du système convergera vers son état d’équilibre.

Chapitre III Commande des Systèmes Non-linéaires
75
Cependant, un système attractif n’est pas nécessairement stable, au sens de la définition
de la stabilité, c’est pourquoi la notion de stabilité asymptotique garantit que l’état du système
converge vers son état d’équilibre sans trop s’en éloigner.
III.1.4. Définition (Stabilité asymptotique):
L’origine est un point d’équilibre asymptotiquement (resp. globalement
asymptotiquement) stable pour (3.5) s’il est stable et attractif (resp. globalement attractif).
III.1.5. Définition (Stabilité exponentielle) :
L’origine est un point d’équilibre localement exponentiellement stable pour (3.5) s’il
existe deux constantes strictement positives et telles que :
),0(,,<,,( 00)(
000 rxttexttx tt Β∈∀≥∀× −−
(3.11)
La constante α est appelée le taux de convergence, où ),0( rB est la boule ouverte de
centre zéro, de rayon r > 0.
Lorsque nRrB =),0( , on parle de stabilité exponentielle globale.
Note :
- Les définitions précédentes sont utilisées, pour démontrer la stabilité de (3.5)
autour de son point d’équilibre ce qui exige la résolution explicite de l’équation différentielle
(3.5), ce qui est très difficile. La méthode directe de Lyapunov permet de faciliter cette
difficulté.
- Cette méthode consiste à définir une fonction particulière dont l’existence garantit
la stabilité.

Chapitre III Commande des Systèmes Non-linéaires
76
III.2. Méthode directe de Lyapunov
La méthode directe de Lyapunov permet d’analyser la stabilité d’un système autour de
son point d’équilibre sans le résoudre explicitement [27].
L’existence d’une fonction particulière fournit des informations sur la stabilité du
système.
III.2.1. Définition 1 :
Soit ),( txV : Rn × R+ → R+ une fonction continue.
V est dite propre définie positive si :
;0>),(0,.1 , txVxRxRt n ≠∈∀∈∀ +
;00),(.2 , =⇒=∈∀ + xtxVRt
∞=∈∀ ∞→+ ),(lim.3 , txVRt x
III.2.2. Définition 2 (Fonction de Lyapunov) :
Une fonction ),( txV continûment différentiable en ses arguments est une fonction de
Lyapunov locale (respectivement globale) au sens large pour le système (3.5) si elle est
propre, définie positive et s’il existe un voisinage de l’origine 0V tel que :
0∈∀ x (Respectivement nRx ∈∀ ),
0),(),(
),(),('
≤
∂∂+
∂∂= txf
x
txVtx
t
VtxV
(3.12)
Si ,0<),( txV V est appelée fonction de Lyapunov au sens strict pour (3.5).
La méthode directe de Lyapunov donne une condition suffisante garantissant la
stabilité au point d’équilibre 0.
Chapitre III Commande des Systèmes Non-linéaires
77
Remarque :
Si le système différentiel (3.5) admet une fonction de Lyapunov locale au sens large
(respectivement au sens strict), alors l’origine est un point d’équilibre localement stable
(respectivement asymptotiquement stable).
Si la fonction de Lyapunov est globale, on parle alors de stabilité globale
(respectivement de stabilité asymptotique globale)[17].
Il est toutefois assez classique d’utiliser une fonction de Lyapunov quadratique,
de type :
x(t)P(t)xV(x,t) T ××= ,
Où la matrice P est symétrique et définie positive [12].
IV. Stabilité des systèmes à retards
IV.1. Introduction
Les phénomènes de retard apparaissent naturellement dans la modélisation de
nombreux processus physiques.
La biologie, l'écologie, les sciences de l'ingénieur ou les télécommunications sont des
domaines ou interviennent des équations différentielles dont l'évolution dépend non seulement
de la valeur de leurs variables à l'instant présent t, mais aussi d'une partie de leurs histoires,
c'est-à-dire des valeurs à un instant t<t′ . Ces équations différentielles sont ainsi dites
« héréditaires » ou plus simplement " à retard".
La plupart des commandes actuellement sont implantées sur des calculateurs
numériques. Par conséquent, si un processus à réguler ne contient pas de retard intrinsèque,
des retards apparaissent dans la boucle de commande par l'intermédiaire des temps de réaction
des capteurs ou des actionneurs, des temps de transmissions des informations ou des temps de
calculs.
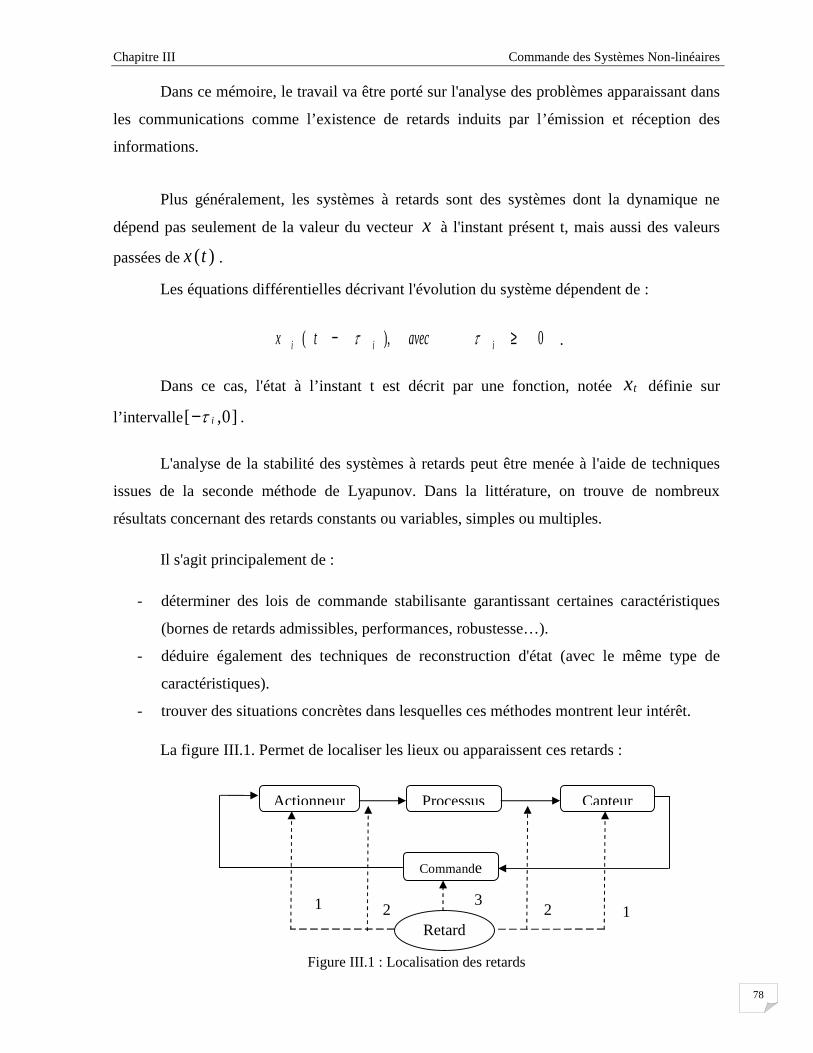
Chapitre III Commande des Systèmes Non-linéaires
78
Dans ce mémoire, le travail va être porté sur l'analyse des problèmes apparaissant dans
les communications comme l’existence de retards induits par l’émission et réception des
informations.
Plus généralement, les systèmes à retards sont des systèmes dont la dynamique ne
dépend pas seulement de la valeur du vecteur x à l'instant présent t, mais aussi des valeurs
passées de )(tx .
Les équations différentielles décrivant l'évolution du système dépendent de :
0),( ≥− iii avectx .
Dans ce cas, l'état à l’instant t est décrit par une fonction, notée tx définie sur
l’intervalle ]0,[ i− .
L'analyse de la stabilité des systèmes à retards peut être menée à l'aide de techniques
issues de la seconde méthode de Lyapunov. Dans la littérature, on trouve de nombreux
résultats concernant des retards constants ou variables, simples ou multiples.
Il s'agit principalement de :
- déterminer des lois de commande stabilisante garantissant certaines caractéristiques
(bornes de retards admissibles, performances, robustesse…).
- déduire également des techniques de reconstruction d'état (avec le même type de
caractéristiques).
- trouver des situations concrètes dans lesquelles ces méthodes montrent leur intérêt.
La figure III.1. Permet de localiser les lieux ou apparaissent ces retards :
Figure III.1 : Localisation des retards
Actionneur Capteur
Commande
Processus
Retard
1 22 13
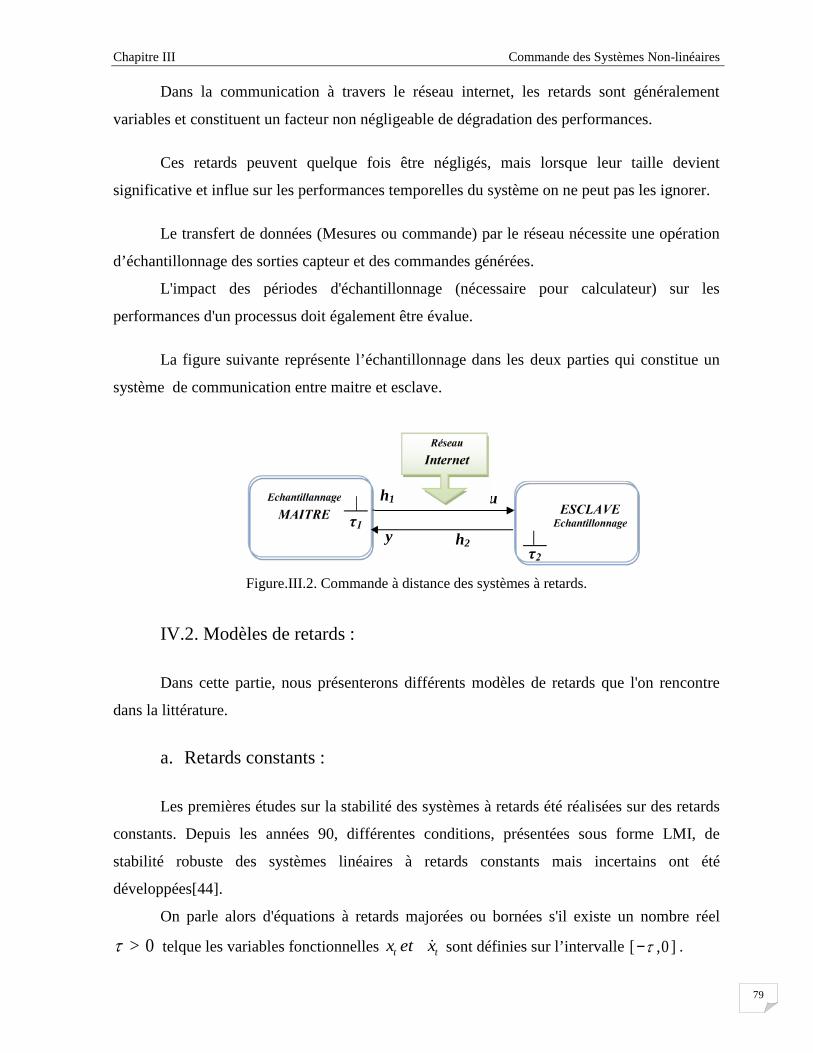
Chapitre III Commande des Systèmes Non-linéaires
79
Dans la communication à travers le réseau internet, les retards sont généralement
variables et constituent un facteur non négligeable de dégradation des performances.
Ces retards peuvent quelque fois être négligés, mais lorsque leur taille devient
significative et influe sur les performances temporelles du système on ne peut pas les ignorer.
Le transfert de données (Mesures ou commande) par le réseau nécessite une opération
d’échantillonnage des sorties capteur et des commandes générées.
L'impact des périodes d'échantillonnage (nécessaire pour calculateur) sur les
performances d'un processus doit également être évalue.
La figure suivante représente l’échantillonnage dans les deux parties qui constitue un
système de communication entre maitre et esclave.
Figure.III.2. Commande à distance des systèmes à retards.
IV.2. Modèles de retards :
Dans cette partie, nous présenterons différents modèles de retards que l'on rencontre
dans la littérature.
a. Retards constants :
Les premières études sur la stabilité des systèmes à retards été réalisées sur des retards
constants. Depuis les années 90, différentes conditions, présentées sous forme LMI, de
stabilité robuste des systèmes linéaires à retards constants mais incertains ont été
développées[44].
On parle alors d'équations à retards majorées ou bornées s'il existe un nombre réel
0> telque les variables fonctionnelles tt xetx sont définies sur l’intervalle ]0,[ − .
Echantillannage
MAITREh1
h2
u
y
ESCLAVEEchantillonnage
Réseau
Internet
τ1
τ2

Chapitre III Commande des Systèmes Non-linéaires
80
b. Retards variables majorés :
Comme la constance du retard est une hypothèse rarement vérifié dans la réalité [44].
On définit les retards majorés pour lesquels il existe un réel connu 0>2 tel que :
2)(0 ≤≤ t (3.12)
c. Retards variables bornés :
On suppose que les retards varient dans un intervalle [0, τ2]. Or les retards apparaissant
dans des processus réels sont le plus souvent dus à des phénomènes de transfert d'information.
Si on autorise le retard à prendre la valeur 0 revient à supposer qu’à un moment ce transfert se
fait de manière instantanée. Il est intéressant de fixer une borne inférieure du retard pour
ensuite pouvoir mesurer son impact sur la stabilité.
On définie alors les retards bornées ; il existe deux réels τ1 et τ2 telque :
21 )(0 ≤≤< t (3.13)
d. Retards variables avec contrainte sur la dérivée :
De nombreux résultats nécessitent une condition sur la dérivée de la fonction retard.
On suppose alors qu'il existe un réel d telque :
1)( <≤ dt (3.14)
Si l'on regarde la fonction )()( tttf −= , la condition précédente implique que f
est une fonction strictement croissante. Cela signifie que les informations retardées arrivent
dans un ordre chronologique.

Chapitre III Commande des Systèmes Non-linéaires
81
e. Retards variables continus par morceaux :
Ces retards apparaissent notamment lors de l'échantillonnage d'un signal. Ce cas
particulier autorise notamment la dérivée du retard à prendre la valeur 1 :
1)( ≤t (3.15)
Critique au vu de la contrainte précédente.
IV.3. Cas des systèmes à retard
Dans le cas des systèmes à retard, la méthode de Lyapunov a été généralisée par
Krasovskii[17].
On considère les systèmes dont le modèle dynamique est de la forme :
),,( txxfx = (3.16)
On suppose que l’origine est un point d’équilibre du système (3.16). Les deux
propositions suivantes établissent des conditions de stabilité asymptotique et exponentielle de
cet équilibre.
Proposition 1 :
On suppose que la fonction f(.) prend des valeurs bornées sur des ensembles bornés.
L’origine du système (3.16) est asymptotiquement stable s’il existe une fonctionnelle
),( xxV (appelée fonctionnelle de « Lyapunov-Krasovskii ») telle que la dérivée de V le
long des trajectoires de (3.16) est définie négative sur un voisinage de l’origine.
- V est définie positive et décroissante.
- il existe des fonctions u et v définies positives vérifiant :
[ ]0,),)((max))(,())(( −∈≤≤ xvtxxVtxu (3.17)

Chapitre III Commande des Systèmes Non-linéaires
82
- la dérivée de V le long des trajectoires de (3.16) est définie négative sur un
voisinage de l’origine : 0<dt
dV .
Proposition 2 :
L’origine du système (3.16) est exponentiellement stable si et seulement si :
Il existe une fonctionnelle V et des réels strictement positifs 121 ,, et telque
pour ),( xxV :
[ ]2
0,,2
2
1)(max),()(
xxxVtx−∈
≤≤(3.18)
2)(),( txxxV −≤
(3.19)
IV.4. Stabilité des systèmes à retards par la seconde méthode de Lyapunov
Dans cette partie, nous rappelons quelques résultats concernant la stabilité
asymptotique des systèmes à retards basée sur la seconde méthode de Lyapunov.
IV.4.1. Seconde méthode de Lyapunov
Considérons le système suivant :
,]0,[),()(
),),(,()(
0 −∈=
=pourx
xtxtftx
t
t(3.20)
Nous supposerons qu'il admet une solution unique et un état d’équilibre 0=tx .
La seconde méthode de Lyapunov repose sur l'existence d'une fonction V définie
positive telle que le long des trajectoires de (3.16), on ait :
0<dt
dv , si 0≠x . (3.21)
Chapitre III Commande des Systèmes Non-linéaires
83
Deux extensions à la seconde méthode de Lyapunov ont été développées dans le cadre
des équations différentielles à retards.
Dans le cas des équations ordinaires (c'est-à-dire sans retard), la fonction
)),(,( txtvv = ne dépend que d'arguments présents. Dans le cas retardé, deux types
d’approches sont possibles :
)),(,( txtvv = Ou ).,( txtvv =
Ces deux approches, respectivement développées par Razumikhin et Krasovskii, vont
être brièvement rappelées dans les deux paragraphes suivants.
IV.4.2. Approche par fonctions de Razumikhin
Dans cette approche, nous nous placerons dans nR en considérant une fonction de
Lyapunov )),(,( txtv classiques pour les équations différentielles ordinaires. Toute fois le
théorème suivant montre qu'il est inutile de vérifier que :
0))(,( ≤txtV (3.22)
Le long de toutes les trajectoires du système.
Théorème :
Soit u , v , et w : ++ → RR des fonctions croissantes, telles que )(u , et )(v
soient strictement positives pour tout θ > 0. Supposons que le champ de vecteur f de (3.20) est
borne pour des valeurs bornées de ses arguments.
S'il existe une fonction continue V : +→× RRR ntelque :
a) )(),())0(( vtVu ≤≤
b) ))0((),( wtV −≤ pour toutes les trajectoires de (3.27) vérifiant :
]0,[)),(,())(,( −∈∀Φ≤++ ttVttV (3.23)
Chapitre III Commande des Systèmes Non-linéaires
84
Alors la solution nulle des (3.27) est uniformément stable.
De plus si 0>)(w pour tout 0> il existe une fonction p : ++ → RR
strictement croissante avec 0>)(p pour tout 0> telque :
a) )(),())0(( vtVu ≤≤
b) ))0((),( wtV −≤ pour toutes les trajectoires de (3.27) vérifiant :
]0,[))),(,(())(,( −∈∀≤++ txtVptxtV (3.24)
Une telle fonction V est appelée fonction de Lyapunov-Razumikhin et la solution nulle
de (3.20) est uniformément asymptotiquement stable.
Dans la pratique, les fonctions p les plus souvent utilisées sont celles de la forme
qp = ou q est une constante strictement supérieure à 1. De plus les fonctions de
Lyapunov recherchées dans l'approche de Razumikhin sont souvent des fonctions
quadratiques de la forme :
),()( tPxxtV T= (3.25)
Ou P est une matrice symétrique définie positive. L'équation (3.25) devient la plupart du
temps :
]0,[),()()()( −∈∀≤++ tPxtqxtPxtx TT et 1>q (3.26)
L’approche Lyapunov-Razumikhin conduit généralement à des résultats plus
conservatifs que ceux tires de l'approche de Lyapunov-Krasovskii, présentée au paragraphe
suivant [29].
IV.4.3 Approche par fonctionnelles de Krasovskii
La méthode de Krasovskii est une extension de la seconde méthode de Lyapunov pour
les équations différentielles fonctionnelles.

Chapitre III Commande des Systèmes Non-linéaires
85
Elle consiste à rechercher des fonctionnelles ),( txtv qui décroissent le long des
solutions de (3.20).
Théorème :
Soient et wvu, : ++ → RR des fonctions croissantes, telles que )(u et )(v
soient strictement positives pour tout 0> et 0)0( =u , 0)0( =v . Supposons que le
champ de vecteur f de (3.20) est borne pour des valeurs bornées de ses arguments.
S'il existe une fonction continue V : +→× RCR telle que :
a) )(),())0(( vtVu ≤≤
b) ))0((),( wtV −≤ pour t ≥ t0 le long des trajectoires de (3.20).
Alors la solution nulle des (3.20) est uniformément asymptotiquement stable.
Si V vérifier plutôt les conditions :
i) )(),())0(( vtVu ≤≤
ii) ))0((),( wtV −≤ pour t ≥ t0 et w(θ) pour tout θ > 0,
iii) V est lipschitzienne par rapport à son second argument,
Alors la solution nulle de (3.20) est exponentiellement stable.
),( tV est ici dérivée au sens de Dini,
),(),(
suplim),(0
tt xtvxtvtV
−+= +∈→ +
Une telle fonctionnelle V est appelée fonctionnelle de Lyapunov-Krasovskii.

Chapitre III Commande des Systèmes Non-linéaires
86
L'idée principale de ce théorème est donc de déterminer une fonctionnelle V définie
positive dont la dérivée le long des trajectoires de (3.20) est définie négative.
V. Stabilité exponentielle des systèmes linéaires :
La plupart des résultats existants concerne la stabilité asymptotique des systèmes à
retards variables ou constants [44]. Pour des problèmes d’observations, de systèmes contrôlés
à travers un réseau ou à distance est de garantir une convergence exponentielle car elle permet
d’assurer une rapidité de convergence.
L’α-stabilité, à taux α garanti des systèmes linéaires à retards est donc claire. Les
approches présentées utilisent les techniques des fonctionnelles de Lyapunov-Krasovskii.
L’idée principale est de réécrire le système en utilisant une nouvelle variable. Ce
changement de variables ajoute des incertitudes sur le système provenant des incertitudes sur
le retard. Afin de déterminer des conditions de stabilité exponentielle, différentes approches
seront proposées.
Une modélisation du système sous forme polytopique permettra d’élaborer des
premières conditions de stabilité et de stabilisation exponentielle. [44]
Définition :
pour tout α > 0, un système à retards est dit α−stable, ou exponentiellement stable et de
degré de convergence α , s’il existe un réel β ≥ 1 tel que les solutions ),,( 0 Φttx , pour toute
condition initiale Φ , vérifiant :
)(0
0),,( ttettx −−Φ≤Φ (3.27)
Cela revient à déterminer une enveloppe exponentielle des trajectoires d’un système.

Chapitre III Commande des Systèmes Non-linéaires
87
V.1. Cas des retards constants
Cette section est consacrée à la classe des systèmes définie par des équations
différentielles aux déférences de type retardé à coefficients et à retards constants. Sans perte
de généralité, nous considérons le système suivant soumis à un seul retard :
]0,[),()(
)()()( 10
−∈∀=−+=
sssx
txAtxAtx(3.28)
Ou x∈Rn, u∈ Rm sont respectivement les vecteurs d’´etat et de commande.
[ ]( )nRcc ,0,20 −=∈Φ
Représente la fonction des conditions initiales. Les matrices A0 et A1 sont supposées
connues, constantes et de dimensions appropriées. Il est connu que, pour un tel système, les
propriétés de stabilité asymptotique et exponentielle sont équivalentes. On peut se donner un
degré de convergence minimal.
L’idée directrice de cette partie est de savoir si pour une valeur de α > 0, un système à
retard est α−stable. Dans ce cadre, il existe différentes techniques qui permettent de déterminer
si un système à retards possède un degré de convergence α fixé a priori.
V.1.1. Première technique : Théorie de Lyapunov et comparaison
L’α−stabilité du système (3.28) est prouvée s’il existe une fonctionnelle de Lyapunov
V vérifiant les propriétés suivantes :
Il existe des réels positifs : Mm aetar ,
Telque :
rM
rm aVa ≤≤ )()0(
Et )()( VrV ≤ (3.29)

Chapitre III Commande des Systèmes Non-linéaires
88
En éffet en appliquant le principe de comparaison, le long des trajectoires de (3.28), V
est majorée exponentiellement :
)( 0)()( ttrt eVxV −≤ (3.30)
En utilisant la condition (3.29), il vient :
)()( 00)()( ttrrM
ttrrm eaeVtxa −− ≤≤ (3.31)
On retrouve alors la condition (3.27) avec :
r
m
M
a
a /1)(= .
V.1.2. Deuxième technique : Méthode du changement de variable.
L’idée de cette technique est de faire intervenir une nouvelle variable :
)( 0)()( ttetxtx −= .
L’objectif est alors de montrer que si la solution )(tx est asymptotiquement stable
pour α fixé, alors le système est α−stable. La preuve suit les étapes suivantes:
Si le système en )( tx est uniformément stable alors, pour tout 0>
quelconque, il existe un réel 0> tel que :
<),( txa m →≤ (3.32)
Il suffit alors d’utiliser la propriété de linéarité du système :

Chapitre III Commande des Systèmes Non-linéaires
89
)2
,(2),(
txtx =
Comme
2est de norme inférieure à δ, on a :
2),( =tx
Et donc :
)( 02),( ttetx −−=
On remarque l’importance de l’uniformité de la stabilité de x
Théorème 2.2.1 :
Le système (3.28) est exponentiellement stable avec un taux α de convergence, s’il
existe des matrices de dimension (n×n), P1, S et R symétriques définie positives et P2, P3, Z1,
Z2, Z3, Y1, Y2, telles que Les conditions LMI suivantes soient satisfaites:
0<
*
0
2
1
11
−
−
Ψ=Γ
SY
Y
AeP
T
TT
(3.33)
;0
**
*
3
2
2
1
1
≥
Z
Z
Y
Z
YR
On définie la matrice P et ψ:
=
32
1 0
PP
PP et

Chapitre III Commande des Systèmes Non-linéaires
90
++++
−+
+
−+
=ΨRY
YYYSZP
IIA
I
IIA
IP T
TT
nn
n
nn
nT
2
211
00
00
(3.34)
Démonstration : La démonstration est basée sur le Théorème suivant appliquée au
système à retard et à coefficients constants :
- Soit le système suivant décrit par :
]0,[),()(
))(()()(
2
∈∀Φ=
−+=
sx
ttxAtxAtx(3.35)
Le retard τ(t) sera considéré comme constant, les critères que nous exposerons utilisent
l’outil LMI.
Lemme 1 :
Le système (3.35) est asymptotiquement stable pour tout retard τ constant inférieur à
τ2, s’il existe des matrices de dimension n×n, symétriques définies positives P1,S et R, et des
matrices de dimension (n×n), P2, P3, Y1, Y2, Z1, Z2 et Z3 telles que les conditions LMI
suivantes soient satisfaites :
0
*
0
1
11
1 <
−
−
Ψ
S
YA
P TT
,
,0*
≥
Z
YR(3.36)

Chapitre III Commande des Systèmes Non-linéaires
91
Ou les matrices Y, Z et Ψ1 sont données par :
,000
000
22
001
TT
n
n
n
nT YY
R
SZP
IA
I
IA
IP
+
+
++
−
+
−
=Ψ
(3.37)
[ ] ,32
2121
==
ZZ
ZZZYYY T
Démonstration. La démonstration utilise une fonctionnelle de Lyapunov-Krasovskii
de la forme :
∫ ∫∫− +−
++=0
22
,)()()()()()()(
t
t
Tt
t
T dsdsRzsZdssSxsxtxEPtxtV T
(3.38)
Ou
=00
0nIE et ou le vecteur )( tx est donné par :
,)(),( tztscolone
Dans le cas de systèmes à retards variables, on introduit la condition supplémentaire
1<)( dt ≤ On énonce alors le lemme suivant :
Lemme 2 [44]:
Le système (3.35) est asymptotiquement stable pour tout retard variable
2)( ≤t et 1)( <≤ dt, s’il existe des matrices de dimension (n×n),

Chapitre III Commande des Systèmes Non-linéaires
92
symétriques définie positives P1,S et R, et des matrices de dimension (n×n), P2, P3, Y1, Y2, Z1,
Z2 et Z3 telles que les conditions LMI suivantes soient satisfaites :
0
)1(*
0
1
11
1 <
−−
−
Ψ
Sd
YA
P TT
,,0
*≥
Z
YR(3.39)
Ou les matrices Y, Z et Ψ1 sont données par (3.37)
VI. Conclusion
Dans ce chapitre, nous avons présenté le contexte des systèmes à retards. Leur
apparition fréquente dans la modélisation des phénomènes physiques. Après avoir présenté les
modèles de systèmes à retards liés à la commande en réseau due à l’échantillonnage.
Ces retards peuvent être négligés, mais lorsque leur taille devient significative et influe
sur les performances temporelles du système on ne peut pas les ignorer.
Les notions de stabilité asymptotique et exponentielle sont équivalentes [44], dans le
cas général.
La Stabilité exponentielle permet d’assurer une rapidité de convergence.
Pour les problèmes d’observations, de systèmes contrôlés à travers un réseau est de
garantir une convergence exponentielle car elle permet d’assurer une rapidité de convergence.
L’idée directrice de cette partie est de savoir si pour une valeur de α > 0, un système à
retard est α−stable.
Dans l’α-stabilité, à taux α garanti des systèmes linéaires à retards on utilise les
techniques des fonctionnelles de Lyapunov-Krasovskii.
Chapitre III Commande des Systèmes Non-linéaires
93
L’idée principale est de réécrire le système en utilisant une nouvelle variable. Ce
changement de variables ajoute des incertitudes sur le système provenant des incertitudes sur
le retard.
L'objectif sera finalement de garantir la stabilité exponentielle avec un taux α de
convergence garanti du système vers la solution e(t) = 0 pour déduire la convergence des
variables de l'observateur vers l'état du système.
Ce chapitre est une introduction de quelques notions sur l’application des LMI dans la
convergence exponentielle avec un taux de convergence α pour garantie la stabilité des
systèmes à retard. L’idée directrice de cette partie est de savoir si pour une valeur une valeur
de α > 0, un système à retard est α−stable.
Chapitre IV Observateurs non-linéaires
94
Chapitre IV
Observateurs non-linéaires
I – Observateurs non linéaires
I.1. Introduction
Le problème de l’estimation de l’état des systèmes linéaires a été entièrement
résolu dans les années 1960−1970. Le cas des systèmes non linéaires, qui concerne la
plupart des systèmes physiques, reste un sujet de recherche largement ouvert et très actif.
De nombreuses méthodes ont été développées pour concevoir des observateurs non
linéaires, le problème reste sans solution dans un grand nombre de cas. C’est un domaine
de recherche actif, car la connaissance de l’état d’un système est nécessaire dans de
multiples applications, à savoir la commande de procédés, la surveillance des systèmes, le
diagnostic et la détection de défauts.
En pratique, l’état d’un système peut correspondre à une grandeur physique que
l’on ne sait pas mesurer directement, en effet, il est bien connu que le problème de mesure
de certaines variables est encore ouvert, notamment certaines concentrations de produits
chimiques ou des activités biologiques dont l'analyse est encore effectuée manuellement.
Plusieurs applications n'ont pu être réalisées parce qu'elles utilisent des variables physiques
non accessibles à la mesure ou dont la mesure requiert des capteurs relativement coûteux
par rapport à l'objectif de l'application envisagée. C'est le cas de certaines concentrations
de produits chimiques et aussi des courants rotoriques des machines électriques dont la
mesure est nécessaire pour leur commande et leur supervision.
Lorsqu’il n’est pas possible de mesurer directement l’état, et ce pour des raisons
physiques ou financières, on a recours à un système dynamique auxiliaire, appelé
observateur, qui est chargé d’estimer l’état du système.
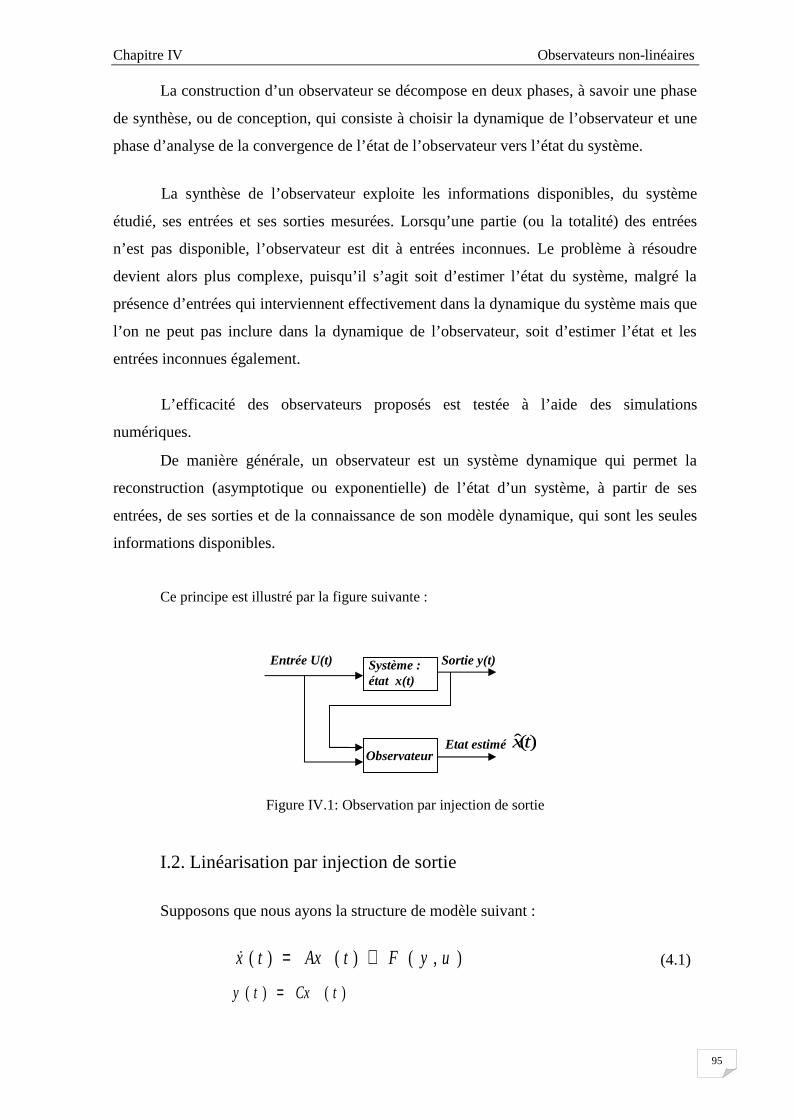
Chapitre IV Observateurs non-linéaires
95
La construction d’un observateur se décompose en deux phases, à savoir une phase
de synthèse, ou de conception, qui consiste à choisir la dynamique de l’observateur et une
phase d’analyse de la convergence de l’état de l’observateur vers l’état du système.
La synthèse de l’observateur exploite les informations disponibles, du système
étudié, ses entrées et ses sorties mesurées. Lorsqu’une partie (ou la totalité) des entrées
n’est pas disponible, l’observateur est dit à entrées inconnues. Le problème à résoudre
devient alors plus complexe, puisqu’il s’agit soit d’estimer l’état du système, malgré la
présence d’entrées qui interviennent effectivement dans la dynamique du système mais que
l’on ne peut pas inclure dans la dynamique de l’observateur, soit d’estimer l’état et les
entrées inconnues également.
L’efficacité des observateurs proposés est testée à l’aide des simulations
numériques.
De manière générale, un observateur est un système dynamique qui permet la
reconstruction (asymptotique ou exponentielle) de l’état d’un système, à partir de ses
entrées, de ses sorties et de la connaissance de son modèle dynamique, qui sont les seules
informations disponibles.
Ce principe est illustré par la figure suivante :
Figure IV.1: Observation par injection de sortie
I.2. Linéarisation par injection de sortie
Supposons que nous ayons la structure de modèle suivant :
),()()( uyFtAxtx += (4.1)
)()( tCxty =
Entrée U(t) Sortie y(t)Système :état x(t)
ObservateurEtat estimé )(tx
Chapitre IV Observateurs non-linéaires
96
Avec la paire (A,C) observable et F une fonction non-linéaire connue de mP RR ×
dans nR (n = dim(x), p = dim(y) et m = dim(u)).
Alors le système est observable. Avec L matrice (n×p) telle que :
)( LCA − Soit stable, on construit l’observateur non-linéaire asymptotique :
))(ˆ)(())(),(()()(ˆ txCtyLtutyFtxAtx −++= (4.2)
Où la dynamique de l’erreur xxe ˆ−= vérifie une équation linéaire autonome
stable:
)()()( teLCAte −=
On parle de linéarisation par injection de sortie.
I.2.1. Définitions :
- Définition (distinguabilité) : Soit le système décrit par : ),( uxfdt
dx = avec
comme mesure )( xhy = .
Deux états initiaux x et x~ sont dits indistinguables (noté xxI ~ ) si pour tout
0≥t , les sorties )(ty et )(~ ty sont identiques pour toute entrée u(t) admissible. Si non
ils sont dits distinguables sinon.
L’indistinguabilité est une relation d’équivalence. Notons I(x) la classe
d’équivalence de x.
- Définition (observabilité globale) :
Le système est dit observable en x si I(x)=x et il est observable si I(x) = x pour
tout x. Ainsi le système est observable si pour tous les états initiaux x et x~, il existe une
entrée admissible u qui distingue x et x~ , c’est à dire telle que )(ty ≠ )(~ ty pour au moins
un temps t ≥ 0.

Chapitre IV Observateurs non-linéaires
97
- Définition (observabilité locale en temps et en espace) :
L’état x est localement observable, si pour tout 0> et pour tout voisinage (x)U
il existe 0> plus petit que et un voisinage (x)V contenu dans U, tel que pour tout :
Vx ∈~ , il existe une entrée [0,η] / t → u(t) qui distingue xet x~ , i.e. telle que :
).(y~)y( ≠
Le système est localement observable s’il l’est pour tout x .
Le système est localement observable si on peut instantanément distinguer chaque
état de ses voisins en choisissant judicieusement l’entréeu .
I.2.2. Théorème (critère de Kalman)
Le système linéaire :
BuAxdt
dx += , Cxy =
Est observable si, et seulement si, le rang de la matrice d’observabilité O est égal à
n = dim(x).
n
CA
CA
C
Orang
n
=
=
−1
...)(
Pour abréger, on dit souvent que la paire (A, C) est observable lorsque le rang de la
matrice d’observabilité O est plein.
II. Conception d’observateur non linéaire
Théoriquement, le problème de la conception d’un observateur pour un système
(non linéaire) donné est posé comme suit.
Chapitre IV Observateurs non-linéaires
98
Soit le système non linéaire :
==
))(),(()(
))(),(()(
tutxhty
tutxftx(4.3)
Avec t > 0, nRx∈ : est le vecteur d’état, mRu∈ : est le vecteur d’entrée, pRy ∈ :
est le vecteur de sortie, et les conditions initiales sont données par )0(0 xx = .
II.1. Définition (Observateur) : On considère le système dynamique [17] :
Ψ=Φ=
))(),(),(()(ˆ))(),(),(()(
tytutztx
tytutztz(4.4)
Où qRz ∈ , q ≤ n avec les conditions initiales : )0(0 zz = . Les entrées de ce
système sont u et y, et la sortie est l’état estimé nRx ∈ˆ .
Si les hypothèses suivantes sont vérifiées :
- ,000 ),()(ˆ)()(ˆ tttxtxtxtx ≥∀=⇒=
- l’erreur d’estimation ),(ˆ)()( txtxte −= tend asymptotiquement (respectivement
exponentiellement) vers zéro
Alors le système (4.4) est un observateur (respectivement un observateur
exponentiel) du système (4.3), d’ordre plein si q = n, d’ordre réduit si q < n.
Le problème de la synthèse d’un observateur consiste donc à trouver des fonctions
Φ et Ψ qui assurent la convergence de l’état estimé x vers l’état réel x du système, et ce,
indépendamment de x0, z0, u(t).
Pour étudier la convergence de l’observateur d’un système, des outils concernant la
stabilité des systèmes dynamiques sont utilisés et notamment la théorie élaborée par
Lyapunov.
Chapitre IV Observateurs non-linéaires
99
II.2. Les différents types d’observateurs : état de l’art
Les approches envisageables dans les systèmes non linéaires sont soit une extension
des algorithmes linéaires, soit des algorithmes non linéaires spécifiques. Dans le premier
cas, l’extension est basée sur une linéarisation du modèle autour d’un point de
fonctionnement. Pour le cas d’algorithmes non linéaires spécifiques, les nombreuses
recherches menées sur ce sujet ont donné naissance à de nombreux algorithmes
d’observation [28].
Nous présenterons ces algorithmes comme suit :
1. Méthodes de transformations non linéaires : Cette technique fait appel à un
changement de coordonnées afin de transformer un système non linéaire en un système
linéaire. Apres la transformation, l’utilisation d’un observateur de type Luenberger suffira
pour estimer l’état du système transformé et en utilisant le changement de coordonnées
inverse pour le système original.
2. Observateurs étendus : Dans ce cas, le calcul du gain de l’observateur se fait à
partir du modèle linéarisé autour d’un point de fonctionnement. C’est par exemple le cas
du filtre de Kalman étendu et l’observateur de Luenberger étendu.
3. Observateurs à grand gain : Ce type d’observateurs est utilisé en général pour les
systèmes lipschitziens. Son nom est dû au fait que le gain de l’observateur choisi est
suffisamment grand pour compenser la non-linéarité du système.
4. Observateurs de Luenberger généralisés (OLG) : C’est un nouveau type
d’observateurs qui a été proposé récemment pour la classe des systèmes monotones. Cette
nouvelle conception consiste à ajouter à l’observateur de Luenberger un deuxième gain à
l’intérieur de la partie non linéaire du système.
5. Observateurs basés sur la théorie de la contraction : Ce type d’observateurs est
basé sur la théorie de la contraction utilisée comme outil d’analyse de la convergence.

Chapitre IV Observateurs non-linéaires
100
III. Observateurs étendus
Il est possible d’étendre quelques techniques linéaires à des systèmes non linéaires,
en calculant le gain de l’observateur à partir du modèle linéarisé autour d’un point de
fonctionnement.
C’est par exemple le cas du filtre de Kalman étendu et l’observateur de Luenberger
étendu que nous citons un peu plus en détail dans la suite.
III.1. Observateur de Luenberger étendu
L’observateur de Luenberger étendu intervient, soit au niveau du système original
avec un gain constant, soit par le biais d’un changement de coordonnées avec un gain
dépendant de l’état à estimer. Dans le premier cas, un modèle linéarisé est nécessaire, et le
gain de l’observateur est calculé par placement de pôles.
Ce type d’observateur ne peut être utilisé que lorsque l’on est sûr que l’état restera
au voisinage de l’état d’équilibre [52].
La classe des systèmes concernés par cette nouvelle conception consiste à ajouter à
l’observateur de Luenberger un deuxième retour de sortie linéaire à l’intérieur de la partie
non linéaire du système. Cette approche concerne les systèmes décrits par les équations
suivantes :
=++=
Cxy
uyxHGtAxtx ),().()()( (4.5)
L’observateur d’état proposé a la structure suivante :
)ˆ(),())ˆ(ˆ(ˆˆ xCyLuyxCyKxHGxAx −++−++= (4.6)
Des conditions de convergence de l’observateur (4.6) ont été établies dans [28]. Ce
résultat concerne les systèmes pour lesquels la fonction non linéaire satisfait les
hypothèses suivantes :

Chapitre IV Observateurs non-linéaires
101
1. chaque composante i est une fonction scalaire à variable scalaire, i.e :
rixHnj
jjijii ,...,1),(
1
== ∑=
=
2. Toutes les composantes de sont des fonctions non décroissantes, i.e :
.,0)()(
Rwvwv
wv ii ∈≠∀≥−−
En utilisant (4.5) et (4.6), la dynamique de l’erreur d’estimation
),(ˆ)()( txtxte −= s’écrit:
Où :).ˆ(ˆ..
))()(()(
xCyKxHwetxHv
wvGeLCAe
−+==
−+−= (4.7)
Ces conditions de convergence sont illustrées dans le théorème suivant :
Théorème : L’erreur d’estimation (4.7) est exponentiellement stable à l’origine
s’il existe une matrice ,0>TPP = une constante ν > 0 et une matrice diagonal 0>D tel
que l’inégalité :
00)(
)(.)()( ≤
−+
−++−+−KCHDPG
DKCHPGIvLCAPPLCAT
Tn
T
,
Soit satisfaite.
III.2. Filtre de Kalman étendu (EKF) :
On considère le système non linéaire (4.1) modifié de la manière suivante :
+=+=
)())(),(()(
)())(),(()(
tvtutxhty
tLwtutxftx(4.8)
Chapitre IV Observateurs non-linéaires
102
rRtw ∈)( et pRtv ∈)( , sont deux bruits blancs gaussiens d’espérance
nulle, de covariances respectives Q et R, non corrélés.
Le filtre de Kalman étendu est une méthode assez répandue pour estimer l’état d’un
système non linéaire. Sa conception, repose sur la généralisation du filtre de Kalman
linéaire, en utilisant des techniques classiques de linéarisation de la dynamique non
linéaire. Ainsi les matrices A et C sont elles remplacées par les matrices jacobiennes f et h,
évaluées en )(ˆ tx .
Le système étudié est linéarisé à chaque instant le long de trajectoires estimées.
On note :
))(),(ˆ()( tutxx
ftA
∂∂=
))(),(ˆ()( tutxx
htC
∂∂= (4.9)
La dynamique du filtre de Kalman étendue (EKF) : est donné sous la forme :
)))(),(ˆ()(()())(),(ˆ()(ˆ tutxhtytKtutxftx −×+=
L’expression du gain K(t) devient :
1)()( −= RCtPtK T (4.10)
Et l’équation de Riccati est elle aussi modifiée avec :
TTT LQLtPtCtRtCtPtAtPtPtAtP +−+= − )()()()()()()()()()( 1 (4.11)
III.3. Techniques de linéarisation exacte
Les techniques de linéarisation exacte de l’erreur d’estimation reposent sur
l’existence d’un changement de coordonnées (c’est-à-dire un difféomorphisme) qui
transforme le système non linéaire initial en un système linéaire auxiliaire.
Chapitre IV Observateurs non-linéaires
103
On considère le système non linéaire (4.12) suivant :
==
))(()(
))(),(()(
txhty
tutxftx(4.12)
Nous construisons un observateur du système (4.12) par linéarisation :
Étape1: Étant donné un état initial nRx ∈0 , le problème de la linéarisation exacte
de l’erreur d’estimation consiste à rechercher un difféomorphisme T défini sur un
voisinage de 0x tel que:
))(()( txTtz = (4.13)
Ce qui revient à : ))(()( 1 tzTtx −= (4.14)
Le difféomorphisme est choisi de telle sorte que le modèle dynamique du système
(4.4) se met, dans le nouveau système de coordonnées, sous la forme canonique observable
généralisée :
=+=
)()(
),()()(
tCzty
uygtAztz(4.15)
Étape 2 : Comme la non linéarité g ne dépend que des entrées et des mesures, qui
sont connues, par injection on linéarise simplement l’erreur d’estimation. En effet, on
choisit comme observateur :
))(ˆ)(())(),(()(ˆ)(ˆ tzCtyKtutygtzAtz −++= (4.16)
Étape 3 : La dynamique de l’erreur d’estimation )(ˆ)()( tztzte −= s’écrit :
)()()( teKCAte −= (4.17)
Étape 4 : On est donc ramené à un problème linéaire, que l’on sait résoudre, par
une technique de placement de pôles. Le gain K est choisi de telle sorte que la matrice
(A – KC) soit stable.
Chapitre IV Observateurs non-linéaires
104
Étape 5 : Finalement, pour obtenir une estimation de l’état x du système non
linéaire initial, il suffit d’appliquer le difféomorphisme inverse :
)ˆ()(ˆ 1 zTtx −= (4.18)
La difficulté majeure de cette méthode de linéarisation exacte réside dans
l’obtention du difféomorphisme T (4.13).
III.4. Observateurs à grand gain
Les techniques dites "à grand gain" peuvent être appliquées sans transformation du
système initial : dans ce cas, la conception de l’observateur se fait directement à partir de la
structure du système.
La méthode présentée par Thau [17] donne des conditions suffisantes de
convergence de l’état estimé vers l’état réel du système, pour la classe des systèmes non
linéaires décrits par le modèle suivant :
=+=
)()(
))(),(()()(
txCty
tutxftxAtx(4.19)
La dynamique de l’état comporte une partie linéaire non commandée et une partie
non linéaire commandée, vérifiant en général la condition de Lipschitz par rapport à x (au
moins localement) :
Définition 1 : (Condition de Lipschitz) :
Une fonction f définie de : mn RR → est dite k-lipschitzienne, s’il existe 0>K
tel que pour tout 2)(),( nRyx ∈ :
)()()( yxKyfxf −≤− (4.20)
L’observateur "à grand gain" possède la structure suivante :
)ˆ(),ˆ(ˆˆ xCyLuxfxAx −++= (4.21)

Chapitre IV Observateurs non-linéaires
105
La fonction non linéaire : f possède une grande constante de Lipschitz, la moindre
erreur entre l’état réel et l’état estimé va se répercuter et croître. Par conséquent, le gain L
de l’observateur (4.21) doit être important pour compenser cette amplification de l’erreur.
La dynamique de l’erreur d’estimation xxe ˆ−= se déduit de (4.20) et (4.21) :
))(),(ˆ())(),(()()( tutxftutxfteLCAe −+−= (4.22)
Le résultat présenté dans [17] est le suivant :
III.5 Théorème 1 : (Thau) :
Si le gain L vérifie :
)max(2)min(
p
qK
< (4.23)
Où k est la constante de Lipschitz de f, et P, Q sont deux matrices respectivement :
symétrique définie positive et définie positive, solutions de l’équation de Riccati :
Q-=LC)-(AP+PLC)-(A T (4.24)
Alors (4.21) est un observateur asymptotique du système non linéaire (4.19).
Remarque :
La méthode de Thau n’est pas constructive [17], elle ne donne aucune indication surle choix d’un gain satisfaisant la condition (4.23).
Il s’agit d’une technique de vérification, qui garanti la convergence asymptotique del’état estimé x vers l’état réel x, lorsque le gain L a déjà été choisi.
La structure de l’observateur non linéaire est une structure de Luenberger étendue aucas non linéaire. La majoration de l’erreur (4.22) utilise la condition de Lipschitz,majoration qui n’est pas optimale.
Chapitre IV Observateurs non-linéaires
106
IV. Modélisation des systèmes non linéaires, non stationnaires à retards
La plus part des processus réels sont non linéaires, on propose des modèles dont les
paramètres peuvent varier au cours du temps et avec l'état.
La différence avec les systèmes linéaires est que les matrices Ai, Bi et Ci
deviennent des fonctions du temps et/ou de l'état et généralement continues (ou continues
par morceaux). Les équations définissant ces modèles, dans le cas d'un retard simple (c'est-
à-dire: r =1) sur l'état et sur l'entrée, se présentent de la manière suivante :
),(),()(
)(),()(),()(),()(),()(
txxtCty
tuxtBtxxtAtuxtBtxxtAtx
t
tttt
=−+−++=
(1.25)
V. Conclusion :
Ces différentes techniques d’estimation d’état sont alors appliquées à la classe de
systèmes non linéaires et aboutissent à la conception d’observateurs spécifiques, d’ordre
plein et d’ordre réduit.
Les observateurs étendus sont des méthodes répandues pour estimer l’état d’un
système non linéaire. Leur conception, reposent sur la généralisation des observateurs
linéaires, en utilisant des techniques classiques de linéarisation de la dynamique non
linéaire comme par exemple filtre de Kalman étendu et Luenberger étendu.
La construction d’observateurs se décompose en synthèse, et conception pour
choisir la dynamique de l’observateur et une phase d’analyse de la convergence de l’état
observé vers l’état réel du système.
La synthèse de l’observateur exploite les informations disponibles, du système
étudié, ses entrées et ses sorties mesurées. Si des entrées ne sont pas disponibles on parle
alors d’observateur à entrées inconnues.
Chapitre IV Observateurs non-linéaires
107
Le problème devient plus complexe, puisqu’il s’agit soit d’estimer l’état du
système, malgré la présence d’entrées qui interviennent effectivement dans la dynamique
du système mais que l’on ne peut pas inclure dans la dynamique de l’observateur, soit
d’estimer l’état et les entrées inconnues également.
L’analyse de la stabilité (asymptotique ou exponentielle) de l’erreur d’estimation
fait appel à la théorie de la stabilité de Lyapunov-Krasovskii dédiée aux systèmes à retard,
et aboutit à des conditions suffisantes de synchronisation, qui sont exprimées sous forme
de BMI (inégalités matricielles bilinéaires) et de LMI (inégalités matricielles linéaires)
(Annexe 1).
L’intérêt de ce chapitre est de donné un aperçu sur la conception des observateurs
non linéaires appliqués à la commande des systèmes non linéaires retardés ou sans retard,
avec les conditions de stabilités de Lyapunov et le calcule du gain d’observateur L par les
techniques LMI. Puisque la plupart des systèmes physiques sont non linéaires.
Chapitre V commande en réseau application sur moteur DC
108
Chapitre V
Commande en réseau application sur
Moteur «DC»
I. Application de la commande en réseau :
I.1. Introduction
Les systèmes commandés en réseau constituent une nouvelle classe de systèmes,
introduisant des problèmes spécifiques liés à la présence de retards, à la perte d'information et
à la gestion du flux de données. Ces contraintes prennent une importance considérable lors de
la commande des procédés rapides pour lesquels les caractéristiques du réseau ne peuvent plus
être négligées.
Avec l’avènement de l’internet, les réseaux industriels s’ouvrent progressivement pour
offrir de nouvelles fonctionnalités (télé-opération, télémaintenance…) et pour intégrer les
données de production dans des outils de gestion d’entreprises (ERP : Enterprise Resource
Planning) multi-sites, multinationales.
Cette ouverture des réseaux peut rendre difficile la maîtrise des flux que véhicule le
réseau industriel qui doit garantir une qualité de service (QdS) requise par l’application (QdC :
Qualité de Contrôle).
Les réseaux de communication génèrent des perturbations sur le système à commander
en termes de retard, de pertes de données, qui doivent être prises en compte dans la boucle de
régulation du système asservi.
Chapitre V commande en réseau application sur moteur DC
109
Le canal de communication entre le système et le contrôleur est souvent modélisé
comme une ligne de transmission, c'est à dire un élément physique induisant un retard
constant, dépendant des propriétés structurelles de la ligne. Cette description devient plus
complexe lorsque le système est commandé à travers un réseau utilisé par de multiples
utilisateurs. Dans ce cas, le retard induit ne dépend plus seulement d'éléments physiques mais
aussi et surtout des algorithmes mis en place pour la gestion du trafic sur le réseau et le codage
de l'information.
I.2. Les systèmes contrôlés en réseau(SCRs)
Les SCRs peuvent se décomposer en trois parties comme le montre la figure.5.1 le
contrôleur, le réseau et le procédé. Les échanges de données entre le contrôleur et le procédé
se font en connectant les capteurs et les actionneurs sur le réseau. Le cheminement pour
contrôler le système est donc le suivant : le contrôleur digital lit les valeurs de mesures de
sortie du système, les compare aux valeurs désirées, et calcule l’entrée de commande à chaque
intervalle de temps suivant la loi de commande choisie.
La commande est encapsulée dans une trame puis elle est envoyée vers l’actionneur à
travers un réseau de communication. L’actionneur récupère la trame puis en extrait la
consigne. Celle-ci est maintenue constante durant chaque intervalle d’échantillonnage par un
bloqueur d’ordre Zéro (BOZ) et est appliquée à l’entrée de commande du système commandé.
Les informations d’état du système générées par les capteurs sont elles aussi encapsulées pour
être transmises sur le réseau jusqu’au contrôleur.
Les retards dans les SCR ne sont donc pas dus uniquement au support de transmission
mais correspondent à une somme de retards provenant des temps de conversion (A/D et D/A),
des temps de traitement de la commande, des temps de codage/décodage des messages, du
temps d’acheminement des messages à travers le réseau et des temps de mesure et de
réalisation de l’action.
La contrainte pour pouvoir contrôler un procédé est que la somme de ces temps doit
être inférieure à la période d’échantillonnage du système. Si certains temps sont facilement
maîtrisables comme le temps de traitement de la commande, ou considérés comme

Chapitre V commande en réseau application sur moteur DC
110
négligeable, il est plus difficile d’estimer les retards induits par le réseau. Ces retards peuvent
varier considérablement en fonction de l’évolution de la charge du réseau (problème de
congestion) et même être infinis dans le cas d’une perte de trames.
Figure. V.1. Système commandé en réseau
Un réseau peut être caractérisé par deux éléments de première importance lors de sa
modélisation :
1- La gestion du flux de données au niveau local (émetteur/récepteur), où les mesures
physiques sont converties en unités d'information à transmettre.
2- La gestion du flux de données au niveau global, où un algorithme gère les
interactions entre les différents flux, évitant ainsi par exemple les collisions ou la perte de
paquets induits par une surcharge du réseau.
Lors de l'émission, la gestion des données dépend du protocole utilisé et de son
implémentation. La taille, la fréquence d'émission et la priorité des paquets peuvent ainsi être
ajustés, en prenant éventuellement en compte des consignes issues de la gestion globale.
Des études considèrent le canal de transmission comme un retard variable dans le
temps (cause d'instabilité du système). Le retard peut alors être caractérise par un modèle
déterministe.
Chapitre V commande en réseau application sur moteur DC
110
négligeable, il est plus difficile d’estimer les retards induits par le réseau. Ces retards peuvent
varier considérablement en fonction de l’évolution de la charge du réseau (problème de
congestion) et même être infinis dans le cas d’une perte de trames.
Figure. V.1. Système commandé en réseau
Un réseau peut être caractérisé par deux éléments de première importance lors de sa
modélisation :
1- La gestion du flux de données au niveau local (émetteur/récepteur), où les mesures
physiques sont converties en unités d'information à transmettre.
2- La gestion du flux de données au niveau global, où un algorithme gère les
interactions entre les différents flux, évitant ainsi par exemple les collisions ou la perte de
paquets induits par une surcharge du réseau.
Lors de l'émission, la gestion des données dépend du protocole utilisé et de son
implémentation. La taille, la fréquence d'émission et la priorité des paquets peuvent ainsi être
ajustés, en prenant éventuellement en compte des consignes issues de la gestion globale.
Des études considèrent le canal de transmission comme un retard variable dans le
temps (cause d'instabilité du système). Le retard peut alors être caractérise par un modèle
déterministe.
Chapitre V commande en réseau application sur moteur DC
110
négligeable, il est plus difficile d’estimer les retards induits par le réseau. Ces retards peuvent
varier considérablement en fonction de l’évolution de la charge du réseau (problème de
congestion) et même être infinis dans le cas d’une perte de trames.
Figure. V.1. Système commandé en réseau
Un réseau peut être caractérisé par deux éléments de première importance lors de sa
modélisation :
1- La gestion du flux de données au niveau local (émetteur/récepteur), où les mesures
physiques sont converties en unités d'information à transmettre.
2- La gestion du flux de données au niveau global, où un algorithme gère les
interactions entre les différents flux, évitant ainsi par exemple les collisions ou la perte de
paquets induits par une surcharge du réseau.
Lors de l'émission, la gestion des données dépend du protocole utilisé et de son
implémentation. La taille, la fréquence d'émission et la priorité des paquets peuvent ainsi être
ajustés, en prenant éventuellement en compte des consignes issues de la gestion globale.
Des études considèrent le canal de transmission comme un retard variable dans le
temps (cause d'instabilité du système). Le retard peut alors être caractérise par un modèle
déterministe.
Chapitre V commande en réseau application sur moteur DC
111
I.3. Introduction au Réseaux
I.3.1. Présentation
De la même façon que des progiciels, il est nécessaire de se préoccuper du transfert de
données. Les exigences temporelles et le type de données à véhiculer vont permettre de
présenter les réseaux adéquats aux domaines de l'entreprise.
I.3.2. Niveaux de planification et d’exécution
Les applications à ces niveaux sont parfois réparties sur de grandes distances ; les
aspects de synchronisme et de temps réel ne sont pas une contrainte. Pour les réseaux
industriels, le quasi-standard est le référentiel Ethernet à 10 Mbit/s avec l’utilisation du
standard TCP/IP, pour les couches de routage et de transport. Ces couches sont nécessaires du
fait de la quantité de données à échanger et de l’étendue des réseaux supportés.
Pour les liaisons de grandes distances, nous trouvons, au niveau des couches basses des
réseaux, des liaisons spécialisés LS (Transfix…) ou RNIS.
Les réseaux de terrain permettent de répondre aux contraintes temporelles et à la notion
de cohérence temporelle pour les échanges de bas niveau (capteur/actionneur, E/S
(entrées/sorties) déportées …).
Soit les trois différents modèles de protocoles illustrant les principaux réseaux de
communication utilisés dans l'industrie.
I.4. Réseaux de communication
I.4.1 Bus de terrain : CAN
Le bus de terrain CAN (Controller Area Network), fréquemment utilise dans l'industrie
(notamment automobile avec le VAN, qui est un exemple spécifique de CAN utilise pour les
Chapitre V commande en réseau application sur moteur DC
112
contrôleurs électroniques des véhicules motorises,), est caractérise par l'utilisation de niveaux
de priorité pour l'émission des messages (229 niveaux). Son débit est au maximum de 1Mbit/s,
pour une longueur de 40m.
Il existe aussi des bus de terrain industriels professionnels comme Profibus et Modbus
qui ce caractérisent par la précision et rapidité avec des distances moyennes sont utilisés pour
communiquer avec des automates programmables industriels.
I.4.2. Réseaux locaux : Ethernet
Les réseaux locaux (souvent dénommés LAN : Local Area Networks) sont largement
répandus et habituellement utilisés pour connecter des ordinateurs dans les réseaux prives.
Leur taille est limitée, rendant le retard connu et borné, et ils ont un taux de transmission
élevé. Ethernet constitue un exemple courant de réseau LAN en bus, sans contrôleur
centralisé.
L'accès au bus peut être effectue par protocole à détection de porteuse (CSMA - Carrier
Sense Multiple Access) avec détection de collision (CD : Collision Détection). Les
caractéristiques du retard dépendent fortement de la charge du réseau, rendant Ethernet très
difficile à modéliser.
I.4.3. Réseaux longue distance : Protocole de transfert :
Les réseaux grande distance ou WAN (Wide Area Network) sont caractérises par la
présence d'un ou plusieurs routeurs et de commutateurs, qui gèrent et distribuent l'information.
La principale influence du routeur est d'induire une file d'attente ou sont stockes les
messages avant d'être retransmis. Lorsque les flux d'entrée dans le routeur sont trop
importants, celui-ci devient encombre et des paquets d'information sont perdus. L'émetteur
peut-être informe des paquets reçus par l'envoi des acquittements (acknowledgements) par le
destinataire.
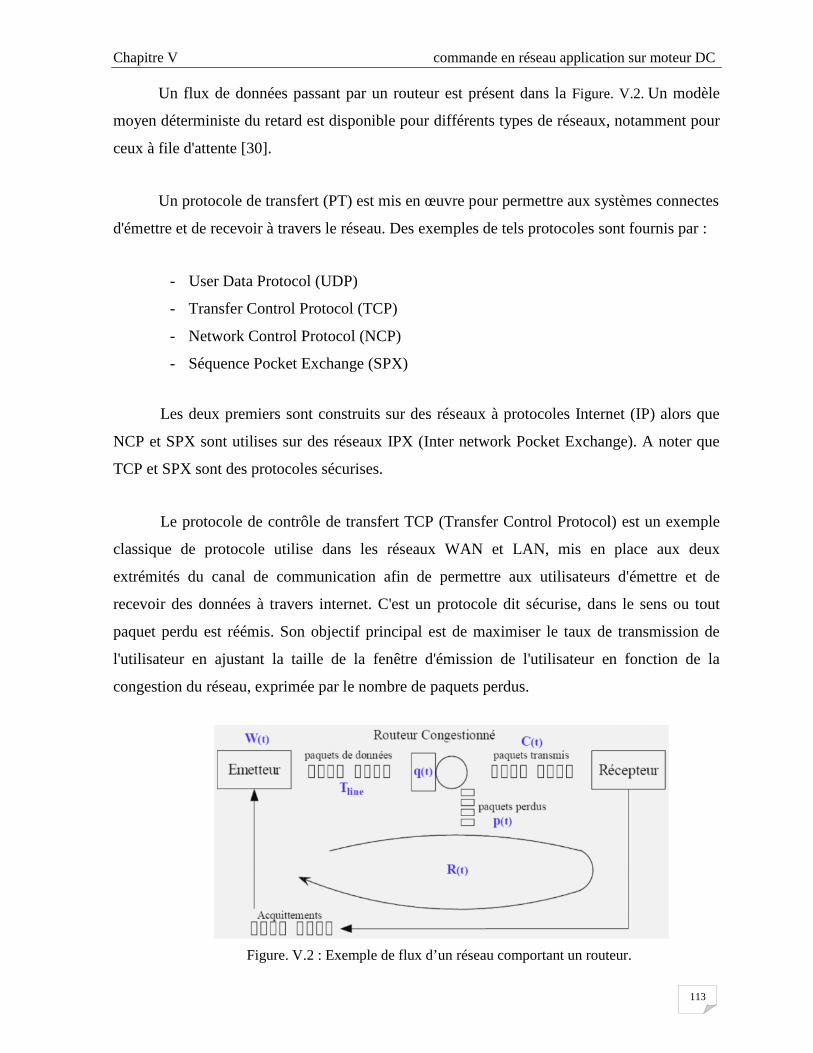
Chapitre V commande en réseau application sur moteur DC
113
Un flux de données passant par un routeur est présent dans la Figure. V.2. Un modèle
moyen déterministe du retard est disponible pour différents types de réseaux, notamment pour
ceux à file d'attente [30].
Un protocole de transfert (PT) est mis en œuvre pour permettre aux systèmes connectes
d'émettre et de recevoir à travers le réseau. Des exemples de tels protocoles sont fournis par :
- User Data Protocol (UDP)
- Transfer Control Protocol (TCP)
- Network Control Protocol (NCP)
- Séquence Pocket Exchange (SPX)
Les deux premiers sont construits sur des réseaux à protocoles Internet (IP) alors que
NCP et SPX sont utilises sur des réseaux IPX (Inter network Pocket Exchange). A noter que
TCP et SPX sont des protocoles sécurises.
Le protocole de contrôle de transfert TCP (Transfer Control Protocol) est un exemple
classique de protocole utilise dans les réseaux WAN et LAN, mis en place aux deux
extrémités du canal de communication afin de permettre aux utilisateurs d'émettre et de
recevoir des données à travers internet. C'est un protocole dit sécurise, dans le sens ou tout
paquet perdu est réémis. Son objectif principal est de maximiser le taux de transmission de
l'utilisateur en ajustant la taille de la fenêtre d'émission de l'utilisateur en fonction de la
congestion du réseau, exprimée par le nombre de paquets perdus.
Figure. V.2 : Exemple de flux d’un réseau comportant un routeur.
Chapitre V commande en réseau application sur moteur DC
113
Un flux de données passant par un routeur est présent dans la Figure. V.2. Un modèle
moyen déterministe du retard est disponible pour différents types de réseaux, notamment pour
ceux à file d'attente [30].
Un protocole de transfert (PT) est mis en œuvre pour permettre aux systèmes connectes
d'émettre et de recevoir à travers le réseau. Des exemples de tels protocoles sont fournis par :
- User Data Protocol (UDP)
- Transfer Control Protocol (TCP)
- Network Control Protocol (NCP)
- Séquence Pocket Exchange (SPX)
Les deux premiers sont construits sur des réseaux à protocoles Internet (IP) alors que
NCP et SPX sont utilises sur des réseaux IPX (Inter network Pocket Exchange). A noter que
TCP et SPX sont des protocoles sécurises.
Le protocole de contrôle de transfert TCP (Transfer Control Protocol) est un exemple
classique de protocole utilise dans les réseaux WAN et LAN, mis en place aux deux
extrémités du canal de communication afin de permettre aux utilisateurs d'émettre et de
recevoir des données à travers internet. C'est un protocole dit sécurise, dans le sens ou tout
paquet perdu est réémis. Son objectif principal est de maximiser le taux de transmission de
l'utilisateur en ajustant la taille de la fenêtre d'émission de l'utilisateur en fonction de la
congestion du réseau, exprimée par le nombre de paquets perdus.
Figure. V.2 : Exemple de flux d’un réseau comportant un routeur.
Chapitre V commande en réseau application sur moteur DC
113
Un flux de données passant par un routeur est présent dans la Figure. V.2. Un modèle
moyen déterministe du retard est disponible pour différents types de réseaux, notamment pour
ceux à file d'attente [30].
Un protocole de transfert (PT) est mis en œuvre pour permettre aux systèmes connectes
d'émettre et de recevoir à travers le réseau. Des exemples de tels protocoles sont fournis par :
- User Data Protocol (UDP)
- Transfer Control Protocol (TCP)
- Network Control Protocol (NCP)
- Séquence Pocket Exchange (SPX)
Les deux premiers sont construits sur des réseaux à protocoles Internet (IP) alors que
NCP et SPX sont utilises sur des réseaux IPX (Inter network Pocket Exchange). A noter que
TCP et SPX sont des protocoles sécurises.
Le protocole de contrôle de transfert TCP (Transfer Control Protocol) est un exemple
classique de protocole utilise dans les réseaux WAN et LAN, mis en place aux deux
extrémités du canal de communication afin de permettre aux utilisateurs d'émettre et de
recevoir des données à travers internet. C'est un protocole dit sécurise, dans le sens ou tout
paquet perdu est réémis. Son objectif principal est de maximiser le taux de transmission de
l'utilisateur en ajustant la taille de la fenêtre d'émission de l'utilisateur en fonction de la
congestion du réseau, exprimée par le nombre de paquets perdus.
Figure. V.2 : Exemple de flux d’un réseau comportant un routeur.

Chapitre V commande en réseau application sur moteur DC
114
Bien que le TCP ne soit pas un protocole de premier choix pour la synthèse d'une
commande par réseau (faible qualité de service, notée QdS), il fournit un exemple intéressant
de protocole sécurise.
I.4.5. TCP/IP
Le standard IP (Internet Protocol) sert d'intermédiaire entre les protocoles applicatifs et
les protocoles de transmissions de bas niveau comme Ethernet, Ethernet 100, ATM. IP peut
donc fonctionner sur des liaisons à faible débit aussi bien que sur des liaisons à haut débit.
C’est un protocole routable, qui peut emprunter des chemins de natures différentes (réseau
local, étendu, RTC, RNIS).
L'information à transmettre est découpée en paquets de petites tailles. Chaque paquet,
indépendant des autres, l'information qu'il est chargé de délivrer, possède l'adresse de
l'émetteur ainsi que celle du destinataire. Pour atteindre son destinataire, un paquet va passer
par des routeurs (commutateurs de paquets), chacun d'entre eux passera le paquet au routeur
suivant jusqu'à destination.
Les machines doivent posséder un identificateur unique (l’adresse IP par exemple,
193.52.130.55), représenté par quatre octets. Un découpage logique interne permet de
numéroter les réseaux, les sous-réseaux et enfin les machines [30].
Sur la plupart des machines connectées, plusieurs applications se déroulent
simultanément. Par le biais des numéros de port, TCP joue le rôle d'un multiplexeur
d'applications. Il assure également la fiabilité de la transmission (remise en ordre des paquets,
retransmission des paquets perdus).
Toute application industrielle basée sur TCP/IP bénéficie directement de tous les
principes et logiciels Internet. Un navigateur peut être utilisé en supervision de procédé dans
l’usine, mais aussi sur Internet/Intranet si la liaison IP existe.

Chapitre V commande en réseau application sur moteur DC
115
II. Problématiques :
La présence d'un réseau dans la boucle de commande induit de nombreux problèmes
spécifiques telles que :
1- La quantification du signal lors de l'émission/réception des paquets d'information.
2- La compression / décompression des informations transmis par le réseau, la perte de
paquets due à la congestion du réseau.
3- La gestion du trafic par le routeur afin de garantir la stabilité du système considéré
4- La stabilisation des systèmes en présence de retard.
5- La prise en compte de la bande passante disponible (dépendante de l'état
d'occupation du réseau) lors de la synthèse du contrôleur.
Le problème de stabilisation par l'intermédiaire d'un réseau est principalement
rencontre pour les systèmes embarques à dynamique rapide (automobiles, avions...) ou un
réseau dédie est mis en place entre les capteurs et actionneurs. Ce réseau permet l'utilisation
d'un protocole sécurisé, qui peut être construit sur une base UDP (plus performant que le
TCP).
Le protocole UDP Contrairement au TCP, il travaille en mode non-connecté : il n'y a
pas de moyen de vérifier si tous les paquets envoyés sont bien arrivés à destination et ni dans
quel ordre, il n'est prévu aucun contrôle de flux ni contrôle de congestion. C'est pour cela qu'il
est souvent décrit comme étant un protocole non-fiable
.
II.1 Objectif de la commande en réseau :
L’objectif de ce chapitre est La conception de la commande, l’observation et
l’implémentation informatique d’un système de type maître-esclave communiquant à distance
par le moyen d’un réseau de type internet. Le but principal de la synthèse de commande est ici
de pouvoir garantir des performances (stabilité, rapidité, robustesse) malgré les perturbations
générées par l’utilisation du réseau (retards variables et asymétriques, perte de paquets et
échantillonnage).
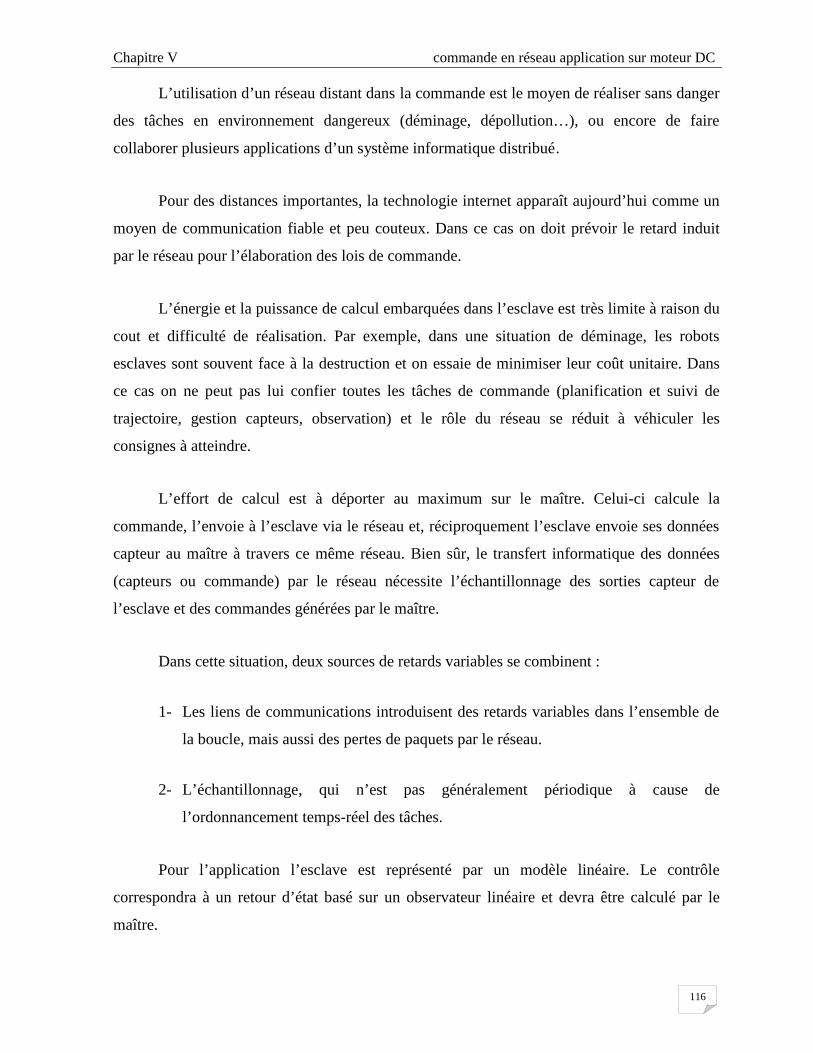
Chapitre V commande en réseau application sur moteur DC
116
L’utilisation d’un réseau distant dans la commande est le moyen de réaliser sans danger
des tâches en environnement dangereux (déminage, dépollution…), ou encore de faire
collaborer plusieurs applications d’un système informatique distribué.
Pour des distances importantes, la technologie internet apparaît aujourd’hui comme un
moyen de communication fiable et peu couteux. Dans ce cas on doit prévoir le retard induit
par le réseau pour l’élaboration des lois de commande.
L’énergie et la puissance de calcul embarquées dans l’esclave est très limite à raison du
cout et difficulté de réalisation. Par exemple, dans une situation de déminage, les robots
esclaves sont souvent face à la destruction et on essaie de minimiser leur coût unitaire. Dans
ce cas on ne peut pas lui confier toutes les tâches de commande (planification et suivi de
trajectoire, gestion capteurs, observation) et le rôle du réseau se réduit à véhiculer les
consignes à atteindre.
L’effort de calcul est à déporter au maximum sur le maître. Celui-ci calcule la
commande, l’envoie à l’esclave via le réseau et, réciproquement l’esclave envoie ses données
capteur au maître à travers ce même réseau. Bien sûr, le transfert informatique des données
(capteurs ou commande) par le réseau nécessite l’échantillonnage des sorties capteur de
l’esclave et des commandes générées par le maître.
Dans cette situation, deux sources de retards variables se combinent :
1- Les liens de communications introduisent des retards variables dans l’ensemble de
la boucle, mais aussi des pertes de paquets par le réseau.
2- L’échantillonnage, qui n’est pas généralement périodique à cause de
l’ordonnancement temps-réel des tâches.
Pour l’application l’esclave est représenté par un modèle linéaire. Le contrôle
correspondra à un retour d’état basé sur un observateur linéaire et devra être calculé par le
maître.
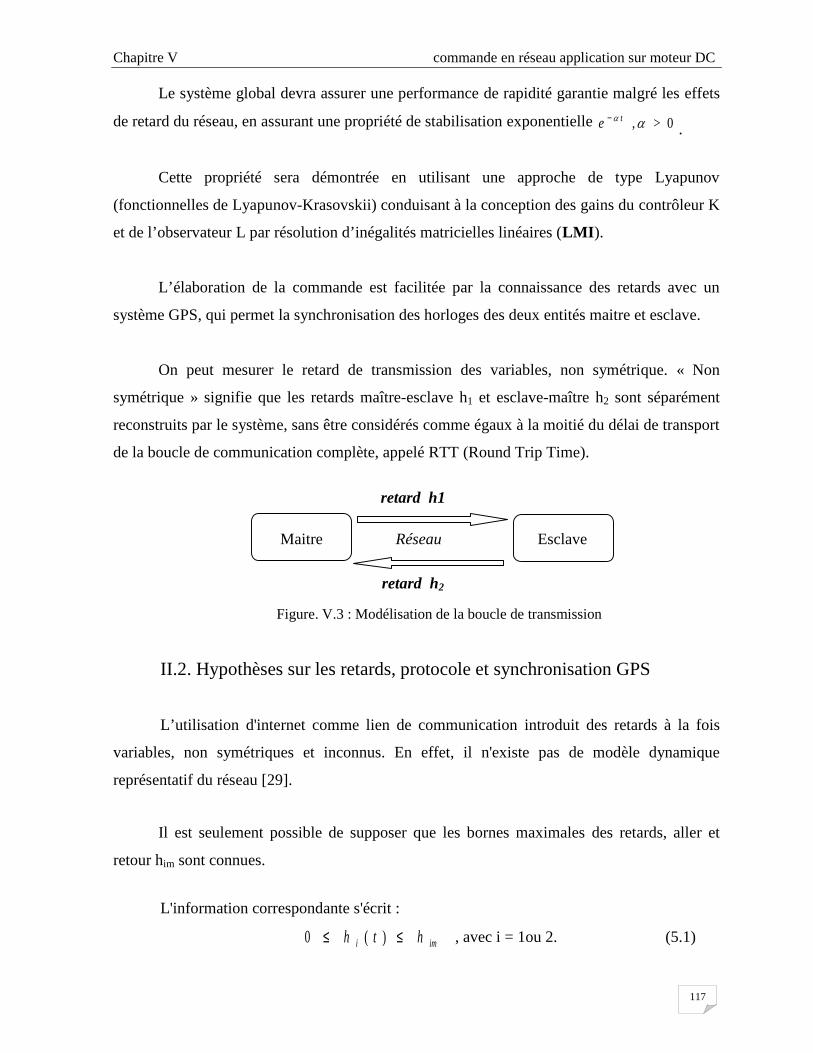
Chapitre V commande en réseau application sur moteur DC
117
Le système global devra assurer une performance de rapidité garantie malgré les effets
de retard du réseau, en assurant une propriété de stabilisation exponentielle 0>, te −.
Cette propriété sera démontrée en utilisant une approche de type Lyapunov
(fonctionnelles de Lyapunov-Krasovskii) conduisant à la conception des gains du contrôleur K
et de l’observateur L par résolution d’inégalités matricielles linéaires (LMI).
L’élaboration de la commande est facilitée par la connaissance des retards avec un
système GPS, qui permet la synchronisation des horloges des deux entités maitre et esclave.
On peut mesurer le retard de transmission des variables, non symétrique. « Non
symétrique » signifie que les retards maître-esclave h1 et esclave-maître h2 sont séparément
reconstruits par le système, sans être considérés comme égaux à la moitié du délai de transport
de la boucle de communication complète, appelé RTT (Round Trip Time).
Figure. V.3 : Modélisation de la boucle de transmission
II.2. Hypothèses sur les retards, protocole et synchronisation GPS
L’utilisation d'internet comme lien de communication introduit des retards à la fois
variables, non symétriques et inconnus. En effet, il n'existe pas de modèle dynamique
représentatif du réseau [29].
Il est seulement possible de supposer que les bornes maximales des retards, aller et
retour him sont connues.
L'information correspondante s'écrit :
imi hth ≤≤ )(0 , avec i = 1ou 2. (5.1)
retard h2
Maitre Esclave
retard h1
Réseau

Chapitre V commande en réseau application sur moteur DC
118
Une deuxième hypothèse qui concerne la variation des retards : 1)( ≤tdt
dh i . Ceci
signifie que les paquets seront pris dans l'ordre chronologique de leur émission.
Le Protocol UDP n'exclut pas que des paquets soient perdus. Dans notre situation, les
paquets contiennent des échantillons (sorties ou commandes). TCP impose d'attendre qu'un
paquet perdu soit réémis et réceptionne, avant de pouvoir utiliser les paquets suivants, ce qui
diminuerait les performances, En termes de retards, UDP sera donc moins pénalisant que TCP.
Il faudra par contre que, sous UDP, les paquets soient émis dans l'ordre chronologique
par le maitre et par l’esclave, ce qui implique d'associer à chaque paquet son instant d'émission
(par ajout d'une datation, ou timestamp).
Cette datation, pour être applicable à la commande, demande la synchronisation
temporelle des deux entités Maitre et Esclave.
La solution technique proposée est basée sur l'utilisation de balises GPS équipant les
deux parties et leur donnant accès à la même horloge (c'est la seule fonctionnalité du GPS qui
sera utilisée ici).
Ce dispositif permet la mesure du retard, même non symétrique, avec lequel le paquet
arrive à destination. Par ce biais, les retards Maitre vers Esclave h1(t) et Esclave vers Maitre
h2(t) sont séparément reconstruits (et pas seulement le retard de boucle RTT).
II.3. Prise en compte de l'échantillonnage
D'autre part, l'implantation finale des algorithmes est effectuée en temps discret et les
effets de l’échantillonnage doivent donc être pris en compte. L’échantillonnage peut être
assimilée à un retard additionnel variable dans le temps [29], de valeur kttt −=)(
pour :
1+<≤ kk ttt , ou Tktk ×= représente le iemek instant d'échantillonnage.
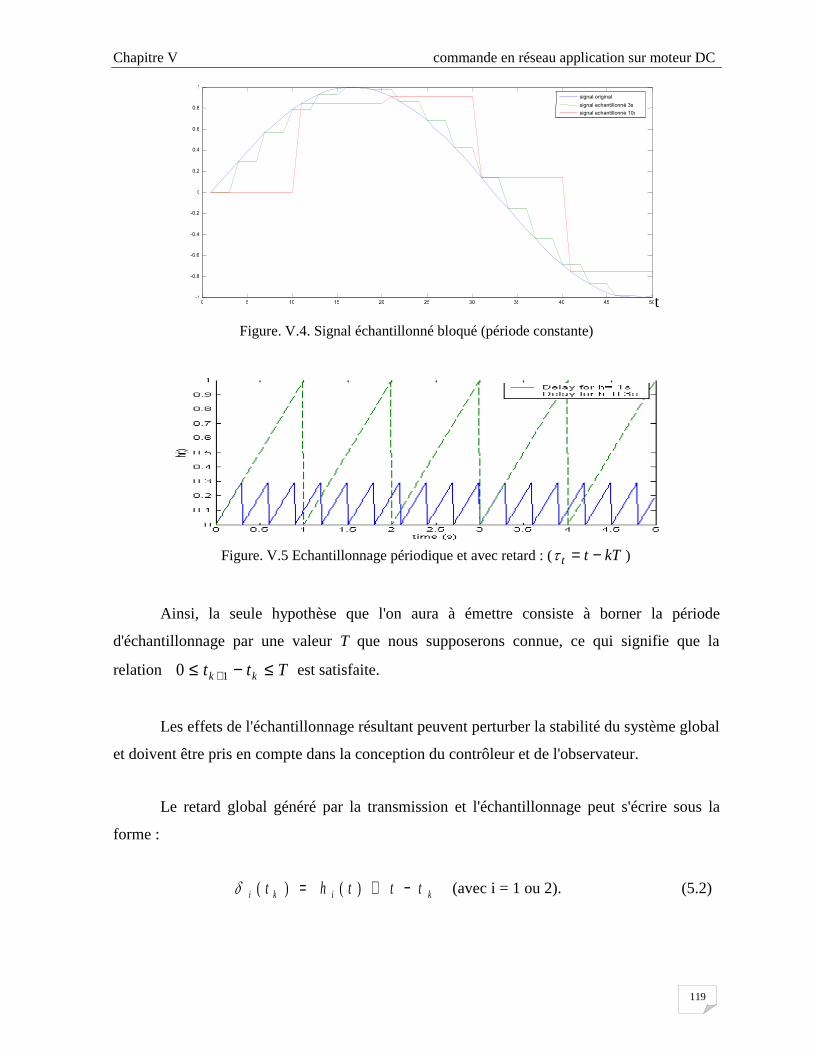
Chapitre V commande en réseau application sur moteur DC
119
Figure. V.4. Signal échantillonné bloqué (période constante)
Figure. V.5 Echantillonnage périodique et avec retard : ( kTtt −= )
Ainsi, la seule hypothèse que l'on aura à émettre consiste à borner la période
d'échantillonnage par une valeur T que nous supposerons connue, ce qui signifie que la
relation Ttt kk ≤−≤ +10 est satisfaite.
Les effets de l'échantillonnage résultant peuvent perturber la stabilité du système global
et doivent être pris en compte dans la conception du contrôleur et de l'observateur.
Le retard global généré par la transmission et l'échantillonnage peut s'écrire sous la
forme :
kiki tttht −+= )()( (avec i = 1 ou 2). (5.2)
0 5 10 15 20 25 30 35 40 45 50-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
signal originalsignal echantillonné 3ssignal echantillonné 10s
t

Chapitre V commande en réseau application sur moteur DC
120
II.4. Problèmes de commande :
Le maitre doit assurer le calcul de la commande et la reconstruction de l'état de
l'esclave. Il faut donc garantir des propriétés de robustesse et de performance du système
global Maitre-Esclave.
Le système global doit converger à une vitesse minimale garantie quelle que soit la
valeur des retards de transmission.
Cette performance globale du système sera obtenue en montrant la convergence
exponentielle (α-stabilité, α étant le taux de convergence garanti), robuste vis-à-vis du retard.
La commande sera utilisée seulement une fois qu'elle aura été reçue par l'esclave, c'est-
à-dire encore h1(t) secondes plus tard. Finalement, l'esclave reçoit une commande calculée à
partir d'une donnée retardée de :
)()( 21 thth + .
Dans ces conditions, il faut améliorer l'information servant à élaborer la commande,
c'est- à-dire de fournir une estimation de l'état non retardé.
Note :
Même si le cas linéaire est simple, il est extrêmement rare de pouvoir mettre
concrètement en œuvre des conditions nécessaires et suffisantes de stabilité adaptées à la
synthèse de lois de commande dans le cas retardé.
L'analyse passe ainsi par des conditions seulement suffisantes, ce qui explique le grand
nombre de publications proposant des conditions techniques sous-optimales mais calculables
au moyen de LMI [29].
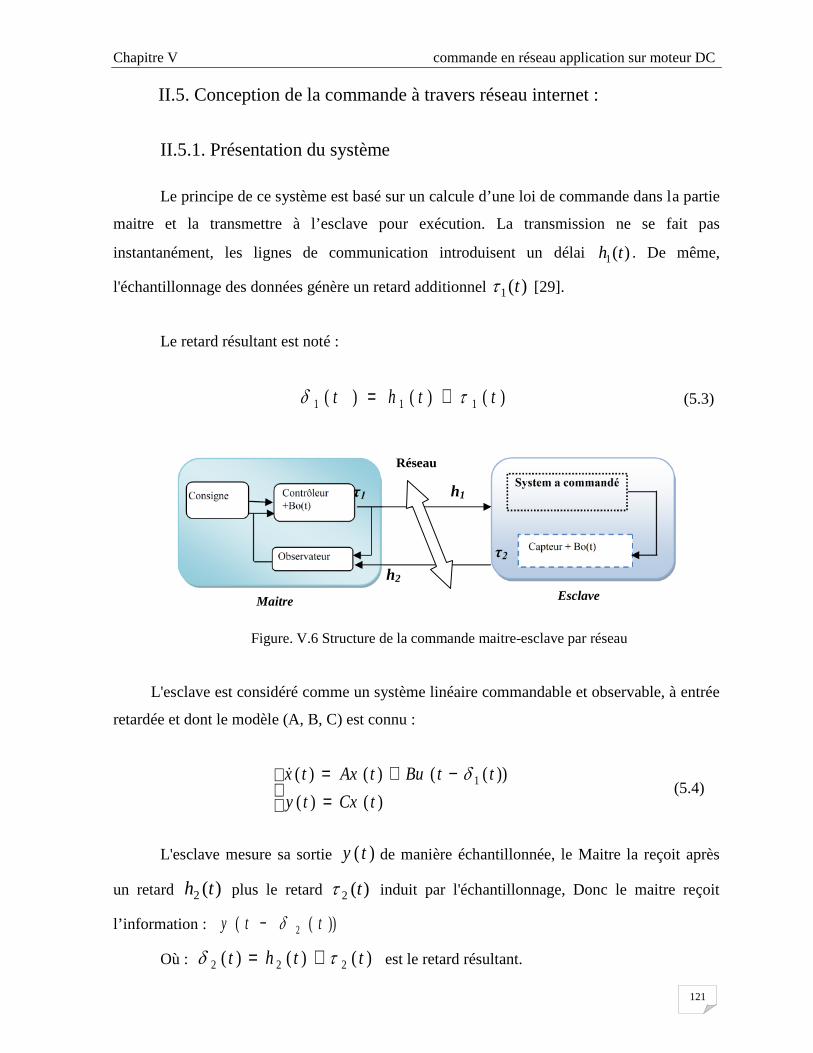
Chapitre V commande en réseau application sur moteur DC
121
II.5. Conception de la commande à travers réseau internet :
II.5.1. Présentation du système
Le principe de ce système est basé sur un calcule d’une loi de commande dans la partie
maitre et la transmettre à l’esclave pour exécution. La transmission ne se fait pas
instantanément, les lignes de communication introduisent un délai )(1 th . De même,
l'échantillonnage des données génère un retard additionnel )(1 t [29].
Le retard résultant est noté :
)()()( 111 ttht += (5.3)
Figure. V.6 Structure de la commande maitre-esclave par réseau
L'esclave est considéré comme un système linéaire commandable et observable, à entrée
retardée et dont le modèle (A, B, C) est connu :
=−+=
)()(
))(()()( 1
tCxty
ttButAxtx (5.4)
L'esclave mesure sa sortie )( ty de manière échantillonnée, le Maitre la reçoit après
un retard )(2 th plus le retard )(2 t induit par l'échantillonnage, Donc le maitre reçoit
l’information : ))(( 2 tty −
Où : )()()( 222 ttht += est le retard résultant.
Consigne
Capteur + Bo(t)Observateur
System a commandéContrôleur+Bo(t)
EsclaveMaitre
Réseau
τ1
τ2
h1
h2
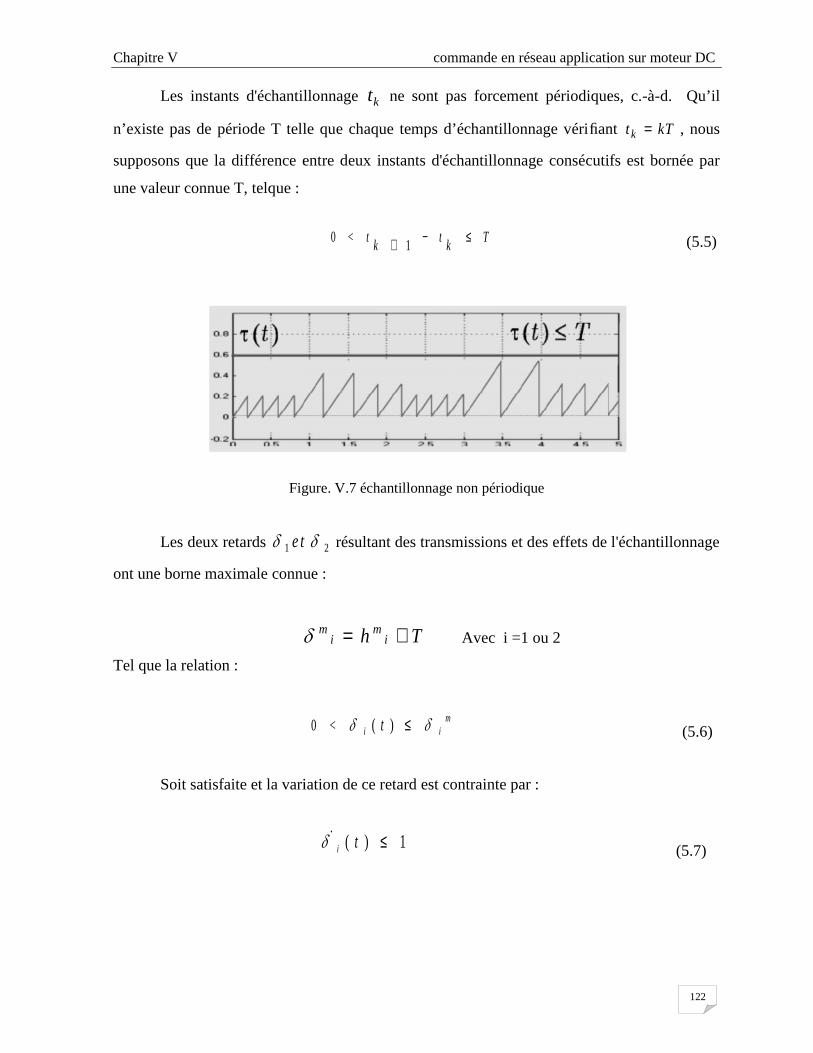
Chapitre V commande en réseau application sur moteur DC
122
Les instants d'échantillonnage kt ne sont pas forcement périodiques, c.-à-d. Qu’il
n’existe pas de période T telle que chaque temps d’échantillonnage vérifiant kTt k = , nous
supposons que la différence entre deux instants d'échantillonnage consécutifs est bornée par
une valeur connue T, telque :
Tk
tk
t ≤−+ 1<0 (5.5)
Figure. V.7 échantillonnage non périodique
Les deux retards 21 e t résultant des transmissions et des effets de l'échantillonnage
ont une borne maximale connue :
Th im
im += Avec i =1 ou 2
Tel que la relation :
mii t ≤)(<0 (5.6)
Soit satisfaite et la variation de ce retard est contrainte par :
1)( ≤ti (5.7)
Chapitre V commande en réseau application sur moteur DC
122
Les instants d'échantillonnage kt ne sont pas forcement périodiques, c.-à-d. Qu’il
n’existe pas de période T telle que chaque temps d’échantillonnage vérifiant kTt k = , nous
supposons que la différence entre deux instants d'échantillonnage consécutifs est bornée par
une valeur connue T, telque :
Tk
tk
t ≤−+ 1<0 (5.5)
Figure. V.7 échantillonnage non périodique
Les deux retards 21 e t résultant des transmissions et des effets de l'échantillonnage
ont une borne maximale connue :
Th im
im += Avec i =1 ou 2
Tel que la relation :
mii t ≤)(<0 (5.6)
Soit satisfaite et la variation de ce retard est contrainte par :
1)( ≤ti (5.7)
Chapitre V commande en réseau application sur moteur DC
122
Les instants d'échantillonnage kt ne sont pas forcement périodiques, c.-à-d. Qu’il
n’existe pas de période T telle que chaque temps d’échantillonnage vérifiant kTt k = , nous
supposons que la différence entre deux instants d'échantillonnage consécutifs est bornée par
une valeur connue T, telque :
Tk
tk
t ≤−+ 1<0 (5.5)
Figure. V.7 échantillonnage non périodique
Les deux retards 21 e t résultant des transmissions et des effets de l'échantillonnage
ont une borne maximale connue :
Th im
im += Avec i =1 ou 2
Tel que la relation :
mii t ≤)(<0 (5.6)
Soit satisfaite et la variation de ce retard est contrainte par :
1)( ≤ti (5.7)
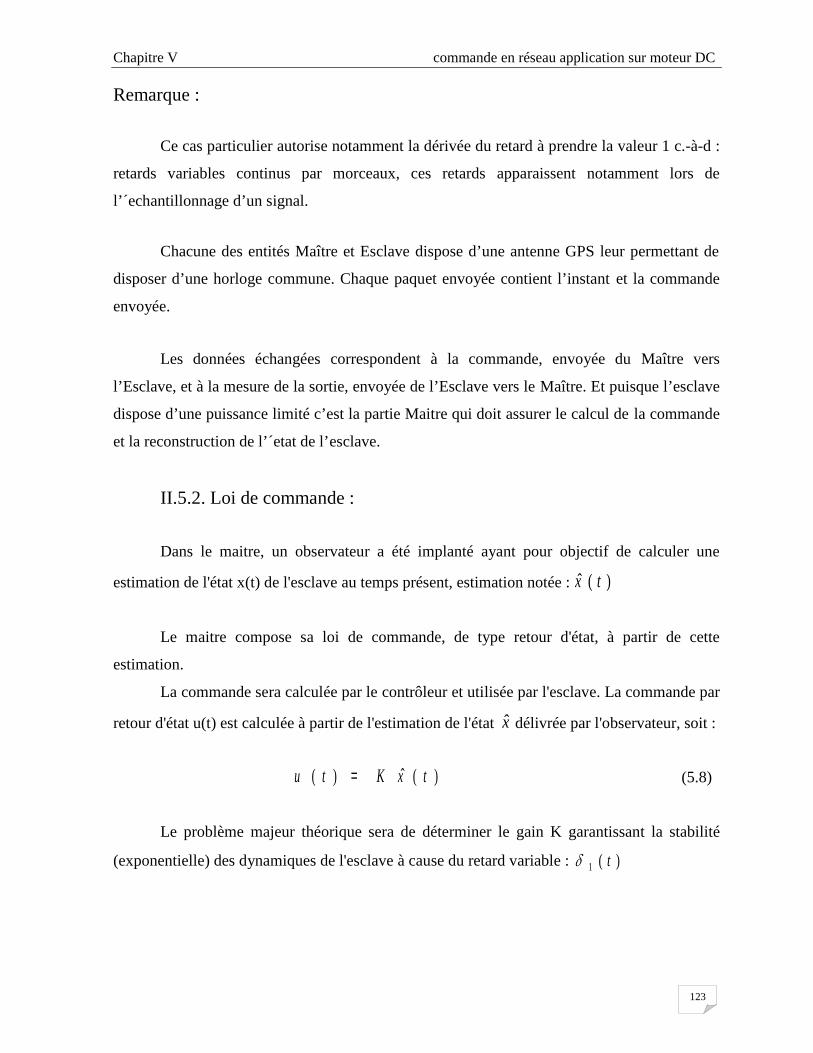
Chapitre V commande en réseau application sur moteur DC
123
Remarque :
Ce cas particulier autorise notamment la dérivée du retard à prendre la valeur 1 c.-à-d :
retards variables continus par morceaux, ces retards apparaissent notamment lors de
l’´echantillonnage d’un signal.
Chacune des entités Maître et Esclave dispose d’une antenne GPS leur permettant de
disposer d’une horloge commune. Chaque paquet envoyée contient l’instant et la commande
envoyée.
Les données échangées correspondent à la commande, envoyée du Maître vers
l’Esclave, et à la mesure de la sortie, envoyée de l’Esclave vers le Maître. Et puisque l’esclave
dispose d’une puissance limité c’est la partie Maitre qui doit assurer le calcul de la commande
et la reconstruction de l’´etat de l’esclave.
II.5.2. Loi de commande :
Dans le maitre, un observateur a été implanté ayant pour objectif de calculer une
estimation de l'état x(t) de l'esclave au temps présent, estimation notée : )(ˆ tx
Le maitre compose sa loi de commande, de type retour d'état, à partir de cette
estimation.
La commande sera calculée par le contrôleur et utilisée par l'esclave. La commande par
retour d'état u(t) est calculée à partir de l'estimation de l'état x délivrée par l'observateur, soit :
)(ˆ)( txKtu = (5.8)
Le problème majeur théorique sera de déterminer le gain K garantissant la stabilité
(exponentielle) des dynamiques de l'esclave à cause du retard variable : )(1 t
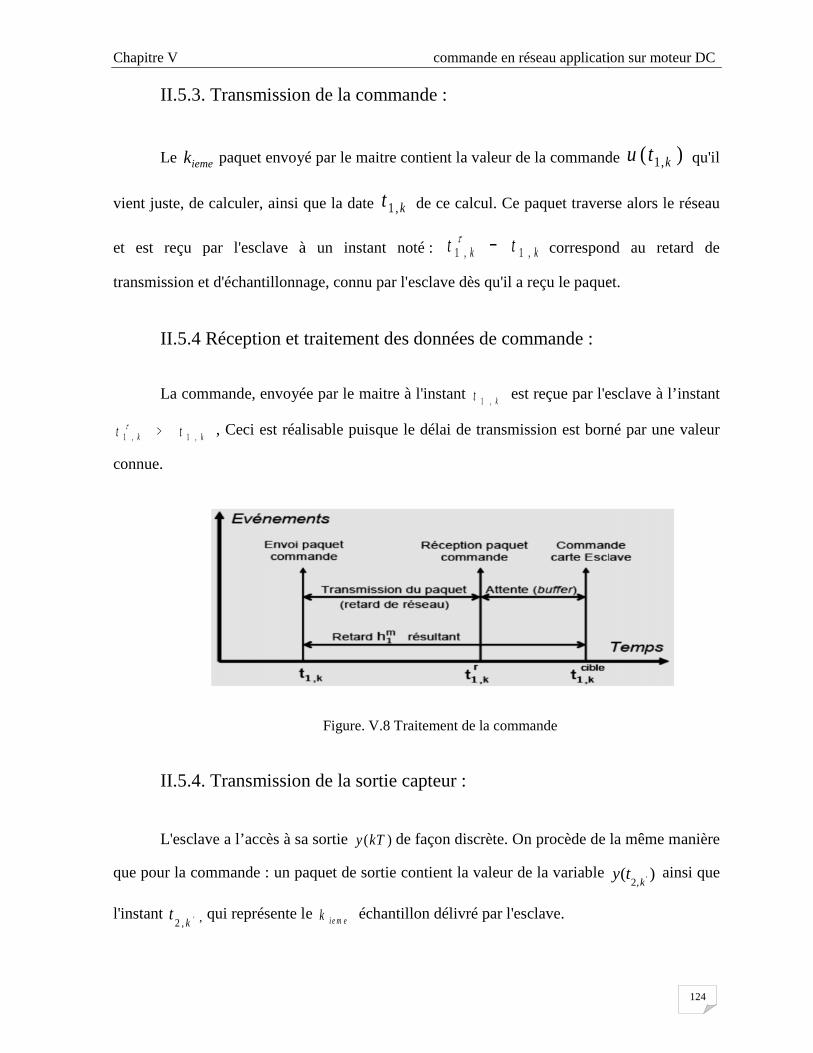
Chapitre V commande en réseau application sur moteur DC
124
II.5.3. Transmission de la commande :
Le iemek paquet envoyé par le maitre contient la valeur de la commande )( ,1 ktu qu'il
vient juste, de calculer, ainsi que la date kt ,1 de ce calcul. Ce paquet traverse alors le réseau
et est reçu par l'esclave à un instant noté : kk tt ,1,1 −correspond au retard de
transmission et d'échantillonnage, connu par l'esclave dès qu'il a reçu le paquet.
II.5.4 Réception et traitement des données de commande :
La commande, envoyée par le maitre à l'instantkt ,1
est reçue par l'esclave à l’instant
kk tt ,1,1 > , Ceci est réalisable puisque le délai de transmission est borné par une valeur
connue.
Figure. V.8 Traitement de la commande
II.5.4. Transmission de la sortie capteur :
L'esclave a l’accès à sa sortie )(kTy de façon discrète. On procède de la même manière
que pour la commande : un paquet de sortie contient la valeur de la variable )( ',2 kty ainsi que
l'instant ',2 kt , qui représente le i e m ek échantillon délivré par l'esclave.
Chapitre V commande en réseau application sur moteur DC
124
II.5.3. Transmission de la commande :
Le iemek paquet envoyé par le maitre contient la valeur de la commande )( ,1 ktu qu'il
vient juste, de calculer, ainsi que la date kt ,1 de ce calcul. Ce paquet traverse alors le réseau
et est reçu par l'esclave à un instant noté : kk tt ,1,1 −correspond au retard de
transmission et d'échantillonnage, connu par l'esclave dès qu'il a reçu le paquet.
II.5.4 Réception et traitement des données de commande :
La commande, envoyée par le maitre à l'instantkt ,1
est reçue par l'esclave à l’instant
kk tt ,1,1 > , Ceci est réalisable puisque le délai de transmission est borné par une valeur
connue.
Figure. V.8 Traitement de la commande
II.5.4. Transmission de la sortie capteur :
L'esclave a l’accès à sa sortie )(kTy de façon discrète. On procède de la même manière
que pour la commande : un paquet de sortie contient la valeur de la variable )( ',2 kty ainsi que
l'instant ',2 kt , qui représente le i e m ek échantillon délivré par l'esclave.
Chapitre V commande en réseau application sur moteur DC
124
II.5.3. Transmission de la commande :
Le iemek paquet envoyé par le maitre contient la valeur de la commande )( ,1 ktu qu'il
vient juste, de calculer, ainsi que la date kt ,1 de ce calcul. Ce paquet traverse alors le réseau
et est reçu par l'esclave à un instant noté : kk tt ,1,1 −correspond au retard de
transmission et d'échantillonnage, connu par l'esclave dès qu'il a reçu le paquet.
II.5.4 Réception et traitement des données de commande :
La commande, envoyée par le maitre à l'instantkt ,1
est reçue par l'esclave à l’instant
kk tt ,1,1 > , Ceci est réalisable puisque le délai de transmission est borné par une valeur
connue.
Figure. V.8 Traitement de la commande
II.5.4. Transmission de la sortie capteur :
L'esclave a l’accès à sa sortie )(kTy de façon discrète. On procède de la même manière
que pour la commande : un paquet de sortie contient la valeur de la variable )( ',2 kty ainsi que
l'instant ',2 kt , qui représente le i e m ek échantillon délivré par l'esclave.

Chapitre V commande en réseau application sur moteur DC
125
Le maitre reçoit ce paquet à l'instant
',2 kt lorsque le paquet atteint le maitre, alors la
valeur du retard est calculer comme : '' ,2,2 kktt −
,grâce à l'horloge GPS.
II.6. Observation du processus :
Le modèle présent dans le maitre est calculé en temps continu t, mais sa commande est
échantillonnée. Notonsk
t,1
le iemek instant d'échantillonnage de cette commande.
L'indexation 'k correspond à l'instant d'échantillonnage ',2 kt le plus récent qu'a reçu le
maitre à l’instant t.
Nous définissons un retard )(t qui cumule le retardk
t du à l'échantillonnage et le
retard )( kth généré par le réseau sur le paquet contenant le iemek échantillon.
Pour tout signal g(t), ce retard s’écrit :
)),()(())(( kkkk ttthtgthtg −−−=−
))),(( ttg −=
Avec : ,1< +≤ kk ttt .)()( kk tttht −+= (5.9)
L'observateur est alors défini comme suit, pour tout [,[ 11,11,1 mkmkhthtt ++∈ + :
=
−++=
)(ˆ)(
)](ˆ)([)()(ˆ)(ˆ ',2',2,1
txCty
tytyLtButxAtx kkk
(5.10)
En utilisant la notation des retards définis précédemment, (5.6) on peut écrire :

Chapitre V commande en réseau application sur moteur DC
126
−=−==
−−−+−+=
.)(,)(
)(ˆ)(
))]((ˆ))(([))(()(ˆ)(ˆ
',22,11
221
kk tttttt
txCty
ttyttyLttButxAtx
(5.11)
Les instantsk
t,1
et ',2 kt , présents dans les équations de l'observateur, sont connus
grâce à la synchronisation des horloges des deux entités. Et pourk
t,1
, au buffer qui permet
de prévoir le retard.
Les caractéristiques du système permettent de connaître les bornes supérieures des
retards intervenant dans (5.11), à savoir :
.)( 11 Tht m +≤ et .)( 22 Tht m +≤ (5.12)
III. Conception des gains du contrôleur et de l’observateur :
Les gains K du contrôleur (5.8) et L de l'observateur (5.10) doivent être déterminés de
façon à garantir un degré de convergence exponentielle α le plus grand possible. La
performance de rapidité sera alors assurée malgré la présence des retards du réseau et de
l'échantillonnage.
Une condition de stabilité exponentielle basée sur une adaptation de [29] est donné
par :
- Soit le système linéaire à retards )( ti variables et bornés :
−∈=−+−+=
],0,[),()(
))(())(()()( 2110
htttx
ttButtxAtxAtx
(5.13)
2,1,1)()(
),())(
∈∀≤≤+=
itettavec
tt
iii
iii

Chapitre V commande en réseau application sur moteur DC
127
Les retards possèdent en général une borne inférieure 0>)( ii t − non nulle (cas
appelé : non Small Delays).
Le théorème suivant utilise une représentation polytopique dépendant des bornes des
retards. Les coefficients qui vont définir les polytopes sont :
)(22
)(21
)(12
)(11
2222
1111
,
,
+−
+−
==
==
ee
ee
(5.14)
Un retour d'état )()( txKtu = conduit au système bouclé suivant :
−∈=−+−+=
],0,[),()(
))(())(()()( 2110
htttx
ttBKxttxAtxAtx
(5.15)
Théorème 5.1 (Stabilité exponentielle) [29] :
Pour un gain matriciel K donné, le système (5.13) est α stable s'il existe des
matrices )( nn × :
1,2=kpour,RetR, Z, Z, Z,Y,Y,S,P,P,P<0 kakk3k2k1k2k1k321
Qui satisfont aux conditions LMI 22,1),( ∈∀ ji :
0<
0
0
0
0
*
0
0
0
*
*
0
0
*
*
*
0
*
*
*
*
22
22
11
111
2
22
1
111
1
−
−
−
−
−
−
Ψ
aRmu
BKPmu
aRmu
APmu
S
YBK
P
S
YA
Pj
T
i
TT
j
TT
i
T
(5.16)

Chapitre V commande en réseau application sur moteur DC
128
2,1,...0
**
*
3
2
2
1
1
=≥
k
Z
Z
Y
Z
YR
k
k
k
k
kk
(5.17)
=
32
1 0
PP
PP
,,
32
21
=
kkT
kkk ZZ
ZZZ [ ]21 kkk YYY =
,..20
0
00
.
0
.
0
2
1
001
∑=
+
++
+
+
−+
+
−+
=Ψ
k kkkk
kkk
Tkk
T
nn
T
aRumR
SZ
YY
PInIA
In
InIA
InP
Démonstration :
Considérons le système à retards variables (5.15), pour un réel 0> , l’équilibre
0x = du système bouclé (5.15) est dit α stable, ou « exponentiellement stable de degré α »,
s’il existe un réel 1≥ tel que la solution )tx(t, 0, de (5.15) satisfait, pour tout instant
initial t0 et fonction initiale [29] :
)(0
0,,( ttettx −−≤
Afin de déterminer des conditions de convergence exponentielle, on introduit la
nouvelle variable )()( txetx t = , avec 0> . Le système (5.15) devient :
))((.))((.)().()( 2)(
11)(
021 ttxBKettxAetxIAtx tt
−+−++=
(5.18)

Chapitre V commande en réseau application sur moteur DC
129
Ainsi, si l’on détermine des conditions de stabilité asymptotique du système défini par
l’équation [5.18], cela signifie que la solution xα(t) converge vers 0 et, par conséquent, est
bornée par une valeur βα. Ainsi, on a :
≤)( tx(5.19)
D’après la définition de xα , cela prouve que le système initial est α stable puisque
l’inégalité suivante est vérifiée :
tetx −≤)(
Le système (5.18) est à paramètre variant à cause des gains scalaires
)()( 21 , tt ee sachant que les retards sont bornés et d’après la définition des paramètres
ij (5.14) les gains linéaires)()( 21 , tt ee
vérifient les inégalités :
2,1,0,)()()( =∀≥∀≤≤ +− iteee iiiii t (5.20)
Cela signifie aussi qu’il existe des fonctions scalaires positives mais aussi inconnues :
22,1),(,: ∈→ jiRRij qui satisfont la condition de convexité :
∑ = =≥∈∀≥∀ 21,
2 1)(,0)(2,1),(,0 ji ijij ttjit (5.21)
Et permettant d’écrire le système (1.18) sous la forme polytopique suivante :
∑ =
•+= 2
1, 0 )()()()( ji ij txIAttx
))(())(( 22111 ttBKxttxA ji −+−+ (5.22)

Chapitre V commande en réseau application sur moteur DC
130
En utilisant la formule de Leibniz qui permet d’écrire :
∫−
+−=+−−−
i
i
ht
thtii dssxthtxhtx
)(1
1
)())(()( (5.23)
Et, finalement en posant :
,0,)(),()( )22(2 ×== IdiagEettxtxcoltx
On obtient l’écriture suivante de (5.22):
∑ =
−+
= 21,
0
)(0
)()( ji ij txIIA
IttxE
( )∫−
−−−−
+ 1
11 )(111
)()(0 ht
thti
dsszhtxA
( )∫−
−−−−
+ 2
22 )(22
)()(0 ht
thtj
dsszhtxBK
(5.24)
Considérons donc la fonctionnelle de Lyapunov- Krasovskii qui est présentée en deux
parties :
)()()( tVtVtV an += (5.25)
Où les deux fonctionnelles sont définies comme suit :
∑ ∫ ∫=−
++= 2
1
0
)()()()()(i
h
t
t iTT
n
i
dsdsxRsxtxEPtxtV
∑ ∫ ∫=−
++ 2
1)()(
i
t
ht
t
t iT
i
dssxSsx

Chapitre V commande en réseau application sur moteur DC
131
∑ ∫ ∫=−
−+= 2
1)()()(
k
t
ht iaT
a
k
kk
dsdsxRsxtV
(5.26)
Vn correspond au contrôle de la stabilité du système soumis aux retards nominaux. La
seconde fonctionnelle Va contrôle les variations des retards autour de leur valeur nominale.
Si les conditions LMI (5.17) sont satisfaites, la majoration suivante est vérifiée :
∑ ∑==
∆+Γ≤ 2
1,
2
1
)()()()()(ji
k
ijk
ijn
Tijn tttttV
(5.27)
Où : )(),(),(),()( 21 htzhtztztzcolt −−= et les autres termes sont
définis par :
−
−
−
−
=Γ
2
22
1
111
02
0
0
*
0
*
*
S
YBK
P
S
YA
P T
j
TT
i
T
ijn
−= ∑
=a
k
Rkk2
1
20
2 2
0
0
0
∫−
−−
−
−=∆ 1
11 )(11
1 )(0
)(2)(ht
thti
TTij dsszA
Ptzt
∫−
−−
−
−=∆ 2
22 )(2
2 )(0
)(2)(ht
thtj
TTij dsszBK
Ptzt

Chapitre V commande en réseau application sur moteur DC
132
En utilisant la majoration classique qui, pour toute matrice symétrique définie positive
R de dimension n et pour tous vecteurs a et b de Rn, assure que la relation :
bRbRaaba TTT 12 +≤ est satisfaite, on obtient :
)(00
)()(11
1
1111 1 tzP
AR
APtzt
T
ii
TTija
≤∆ −−
∫−
−−+ 1
11 )( 1 )()(ht
tht aT dsszRsz
)(00
)()(2
1
222 2 tzP
BKR
BKPtzt
T
jj
TTija
≤∆ −−
∫−
−−+ 2
22 )( 2 )()(ht
tht aT dsszRsz
Ensuite, en introduisant la variable :
)(),(),()(1 tztztcolt =
La combinaison des deux dernières inégalités avec [5.24], [5.26] permet d’écrire :
)()()()( 11
2
1,ttttV ijT
ji ija Γ≤ ∑ =
(5.28)
On remarque que si les conditions (5.16) et (5.17) sont satisfaites, Vα(t) est une somme
convexe de termes négatifs. Ceci permet de conclure que le système (5.15) est
asymptotiquement stable et, par conséquent que le système initial (5.13) est exponentiellement
stable avec un degré de convergence α.

Chapitre V commande en réseau application sur moteur DC
133
III.1. Conception du gain de l’observateur :
Sachant que la paire (A, C) est observable, il est possible de déterminer un gain L tel
que l’état )(ˆ tx de l’observateur (5.10) converge exponentiellement vers l’état non retardé x(t)
du système. Le théorème qui suit permet d’obtenir ce gain L de façon à ce que la convergence
soit α_exponentielle et ce, malgré le retard variable δ2 sur la sortie.
L’erreur d’estimation, définie par : )(ˆ)()( txtxte −= , est régie par :
))(()()( 2 ttLCetAete −−= (1.29)
Théorème (5.2) : On considère l’observateur (1.11) et on suppose que, pour des réels
positifs α et il existe des (n× n) matrices :
RaR, Z3, Z2, Z1,Y2,Y1,S,P,P1,<0
Et une matrice W de dimensions appropriées telles que les conditions LMI (1.30) et
(1.31) soient satisfaites pour j = 1,2 :
0<
.
0..
.
*
...
..
*
*
2
2222
12
2
−
−
−
−Ψ
a
jj
j
R
CW
CW
S
YCW
YCW
(5.30)
0
**
*
3
2
2
1
1
≥
Z
Z
Y
Z
YR
(5.31)
Ou les constantes β2j (j =1,2) sont définie dans (5.14)

Chapitre V commande en réseau application sur moteur DC
134
Et la matrice symétrique Ψ2 est définie par :
,* 22
2
122
112
2
ΨΨΨ=Ψ
.2))(()(
,)()(
,)()()(
232222
2
22220112
2
111220011
2
aT
Tn
T
TTnn
T
RRZPP
YZIAPPP
YYZSPIAIAP
+++++−=Ψ
+++++−=Ψ
++++++++=Ψ
(5.32)
Alors, la convergence exponentielle (vers 0 et à taux α) de l’erreur (5.29) est assurée
grâce au gain :
.)( 1 WPL T −= (5.33)
Démonstration :
La preuve vient du Théorème (5.1) appliqué au cas d'un retard simple et pour le choix :
LPXetPPP 232 , === .
Remarque :
Dans le théorème précédent, le retard δ2 (t) (et plus particulièrement les bornes δ2 et
μ2) sont des paramètres imposés par le réseau et l'échantillonnage. L’objectif consiste donc à
jouer sur le paramètre ε pour trouver la plus grande valeur de α rendant les LMI faisables.
III.2. Conception de la loi de commande :
Dans ce paragraphe on détermine le gain de la loi de commande par retour d'état :
).()( txKtu =
Chapitre V commande en réseau application sur moteur DC
135
Considérons que l'observateur est « parfait » et délivre à tout moment l'état du système
réel, soit e(t) = 0 ou encore : ).(ˆ)( txtx =
On s’intéresse au système en boucle fermée :
)).((ˆ)()( 1 ttxBKtAxtx −+= (5.34)
Théorème (5.3) : supposons que, pour des réels positifs α et ε, il existe des )( nn ×
matrices symétriques définies positives : .,,,1 aRRSP
et des matrices WYYZZZP ,,,,,, 21321 de dimensions appropriées telque les
conditions suivantes soient satisfaites pour i = 1; 2 :
0<0
**
*
1
1
12
21
1
3
−
−
−
−Ψ
a
i
iT
i
Ti
R
BW
BW
S
YBW
YBW
(5.35)
0
**
*
3
2
2
1
1
≥
Z
Z
Y
Z
YR
(5.36)
Ou les constantes β2j (j =1,2) sont défini dans (5.14) et la matrice symétrique Ψ3 est
définie par les blocs :

Chapitre V commande en réseau application sur moteur DC
136
.2))(()(
,)()(
,)()()(
131122
3
22110112
3
111110011
3
aT
Tn
T
TTn
Tn
RRZPP
YZIAPPP
YYZSIAPPIA
+++++−=Ψ
+++++−=Ψ
++++++++=Ψ
(5.37)
Alors, pour tout retard δ1(t), la stabilité exponentielle (à taux α) du système (5.17) est
assurée grâce au gain :
.1−= PWK (5.38)
Démonstration
Partant du théorème 2.1, on choisit P3 = ε P2, où ε est un paramètre de réglage pouvant
améliorer les résultats. On constate alors que la matrice P2 n’est pas singulière du fait que la
seule matrice qui doit être définie négative dans le deuxième terme de la diagonale de (5.16)
est : - ).( 22TPP +
On définit alors :1
2−= PP et, pour toute matrice :
3,2,12,11 ,,,,, ∈∈∈ kai ZRRSYPV
On introduit une nouvelle variable V donnée par : PVPV T=
Remarque :
Comme précédemment, on cherchera à maximiser le paramètre α en jouant sur le
paramètre ε.
Il est possible de déterminer un gain L tel que l'état )(ˆ tx de l'observateur converge
exponentiellement vers l'état non retardé )(tx du système.

Chapitre V commande en réseau application sur moteur DC
137
La dynamique de l’erreur d’estimation :
)(ˆ)()( txtxte −=
La dynamique de l’erreur devient :
)(ˆ)()( txtxte −=D’où on peut écrire :
))]((ˆ))(([
)))(()(ˆ)))(()()(
22
11
ttyttyL
ttButxAttButAxte
−−−−−−−−+=
Ce qui donne :
))(()()( 2 ttLCetAete −−=(5.39)
IV. Stabilité globale du système commandé en réseau
La dynamique du système global (maître, esclave, réseau, échantillonnage et
observateur), intégrant les gains K, L et les retards δ1(t), δ 2(t) avec état observe, est donnée
par :
−−=−+=
))(()()(
))((ˆ)()(
2
1
ttLCetAete
ttxBKtAxtx
(5.40)
Qui se développe sous la forme :
−−=−−−+=
))((..)(.)(
))((..))((..)(.)(
2
11
tteCLteAte
tteKBttxKBtxAtx
(5.41)

Chapitre V commande en réseau application sur moteur DC
138
Ou encore, en introduisant la nouvelle variable : )(),()( tetxcolte =
))(())(()()( 22110 tteAtteAteAte −+−+= (5.42)
Avec :
.0
00,
00,
0
0210
=
−=
=
LCA
BKBKA
A
AA
Le théorème 5.1 : permettra donc l’analyse de la stabilité exponentielle du système
global. La conception des gains K et L peut, quant à elle, être menée selon le mode opératoire
suivant :
– la première étape consiste en une phase d’analyse et d’identification des paramètres
him , T qui, à leur tour, fournissent les δi
m et μi définissant les caractéristiques du retard global ;
– puis, le gain L de l’observateur se détermine en appliquant le théorème 5.2 au
système (5.29) ;
– de la même façon, le gain K du retour d’état se calcule par application du théorème
5.3 au système (5.34) ;
– une fois ces deux gains calculés, on vérifie la stabilité exponentielle globale du
système maître-esclave avec le taux α garanti.
Chapitre V commande en réseau application sur moteur DC
139
V. Application au cas d’un Moteur à courant continu
Cette étude est finalement illustrée par un exemple de système télé-opéré (moteur a
courant continu).
V.1 Introduction au logiciel MATLAB
Le logiciel MATLAB (MATrix LABoratory) est conçu pour travailler dans le domaine
du calcul matriciel numérique. Tous les objets définis dans MATLAB sont donc au moyen de
vecteurs et de matrices/tableaux de nombres [48].
Il dispose d’un ensemble important d’opérateurs et de fonctions MATLAB de base
facilitent leur manipulation, des opérations arithmétiques, différentielles et le calcul matriciel.
Une bibliothèque standard d’autres fonctions où l’utilisateur peut les modifier et
surtout créer et rajouter ses propres fonctions.
L’environnement MATLAB présente un espace de travail (Workspace), Les sources
des fonctions sont disponibles, écrites en “ langage ” MATLAB, ou en C ou en Fortran.
L’interface graphique de MATLAB facilite le tracé de courbes et l’obtention de
graphiques 2D ou 3D de grande qualité (plot, stairs, plot3…). Il permet de mettre en forme
tous les éléments d’un graphique, de créer ses propres menus (uimenu) ainsi que des objets
graphiques tels que sliders, boutons…etc[48].
Le logiciel intègre des boites à outils (toolbox) dédiés à des domaines techniques
spécifiques, comme :
– le traitement de signal (signal processing toolbox ),
– la régulation automatique (control system toolbox ),
– l’identification (system identification toolbox ),
– les réeseaux de neurones (neural networks toolbox ),
– la logique floue (fuzzy logic toolbox ),
– le calcul symbolique (symbolic math toolbox), …etc.
Chapitre V commande en réseau application sur moteur DC
140
Simulink est une boite à outils de MATLAB permettant au moyen d’une interface
graphique évoluée la construction rapide et la simulation de schémas fonctionnels complexes,
contenant des systèmes linéaires et non linéaires.
Dans le cadre de la régulation automatique, MATLAB constitue un outil puissant
d’analyse des systèmes dynamiques linéaires où on peut facilement obtenir les propriétés,
comme les pôles et zéros (roots) et tracer les réponses impulsionelle (impulse), indicielle
(step), à un signal quelconque (lsim), ou harmonique (bode, nyquist).
MATLAB est un outil pour l’ingénieur, pour traiter des problèmes pratiques. Avec sa
boite à outils Simulink.
V.2. Simulation avec la boite à outils Simulink
La boite à outils Simulink est un complément puissant dans MATLAB.
Les contributions de Simulink sont principalement :
1. La construction de schémas fonctionnels.
2. La simulation de systèmes linéaires et non-linéaires, ainsi que de systèmes non-
stationnaires.
3. La simulation de systèmes mixtes analogiques et numériques.
La figure suivante montre la librairie de Simulink utilisée pour la conception des
schémas fonctionnels.
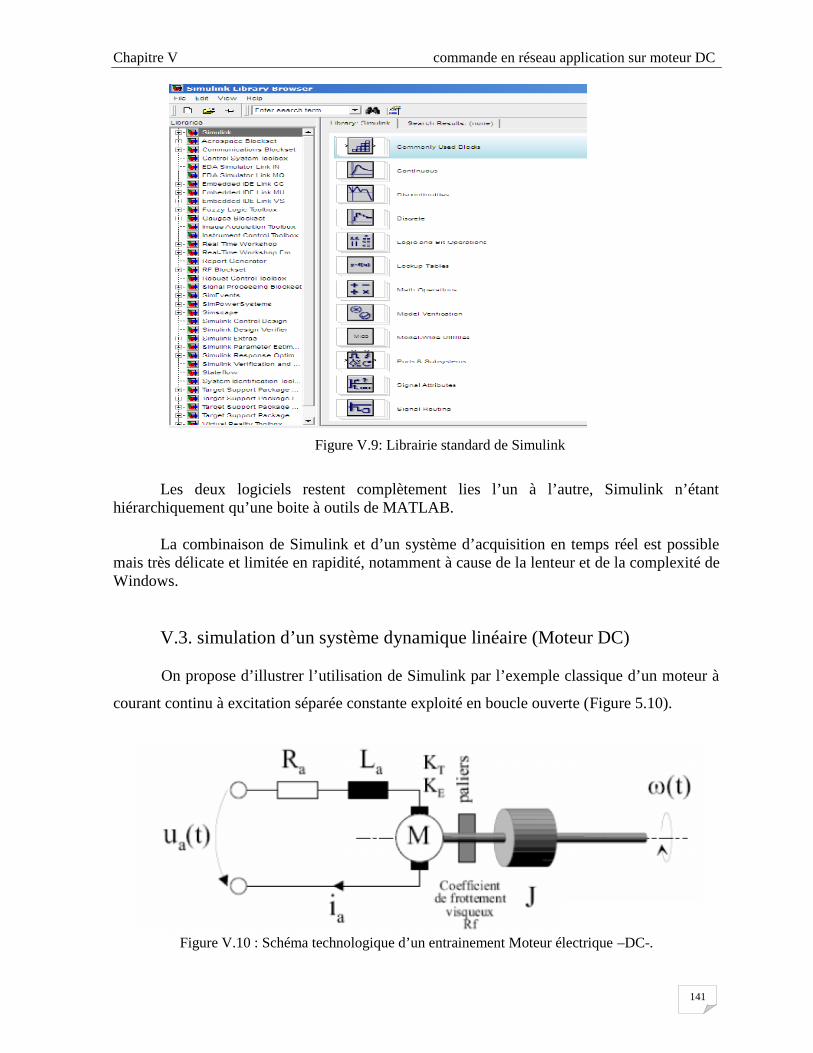
Chapitre V commande en réseau application sur moteur DC
141
Figure V.9: Librairie standard de Simulink
Les deux logiciels restent complètement lies l’un à l’autre, Simulink n’étanthiérarchiquement qu’une boite à outils de MATLAB.
La combinaison de Simulink et d’un système d’acquisition en temps réel est possiblemais très délicate et limitée en rapidité, notamment à cause de la lenteur et de la complexité deWindows.
V.3. simulation d’un système dynamique linéaire (Moteur DC)
On propose d’illustrer l’utilisation de Simulink par l’exemple classique d’un moteur à
courant continu à excitation séparée constante exploité en boucle ouverte (Figure 5.10).
Figure V.10 : Schéma technologique d’un entrainement Moteur électrique –DC-.

Chapitre V commande en réseau application sur moteur DC
142
NB : Le frottement est purement visqueux, proportionnel à la vitesse, de coefficientRf.=b
On admettra que le système est parfaitement linéaire, en faisant les hypothèses pour
simplifier l’exemple et se concentrer sur l’essentiel de cette étude :
– on ne prend pas en compte l’effet des perturbations ;
– le frottement sur l’arbre moteur est purement visqueux ;
– le moteur à courant continu étant compensé, l’effet de réaction d’induit est
négligeable.
V.4. Modélisation
Le modèle en t du système est (les conditions initiales étant supposées identiquement
nulles) :
..
.
...
fem
aTem
ea
aaa
RTdt
dJ
iKT
Kdt
diLiRUa
−=
=
++=
(1)
Après transformation de la Laplace :
Ω−=Ω=
Ω++=
...
.
....
fem
aTem
eaaaa
RTsJ
IKT
KIsLIRUa
Après mise en équations, les équations du moteur à courant continu montrent que la
FEM est à contre réaction, le signal d’entrée (la tension d’induit )(tu a a la forme d’un saut
L’équation électrique
Couple électromécanique
L’équation mécaniquede l’arbre du moteur
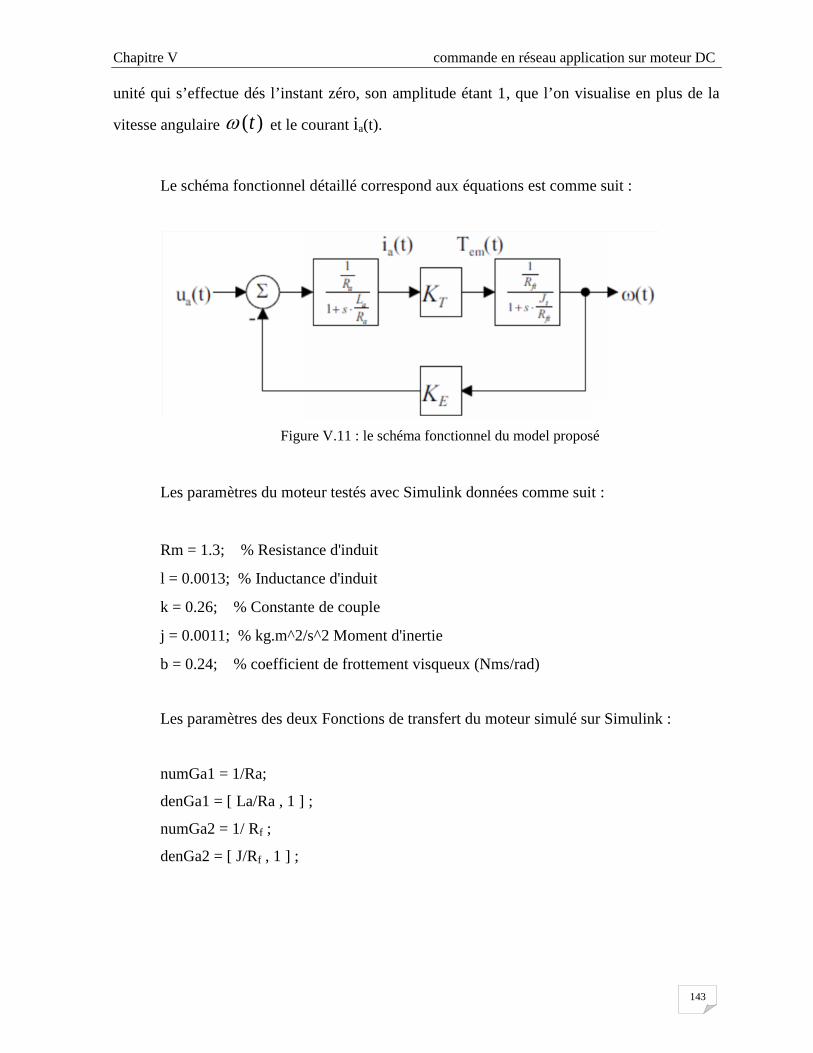
Chapitre V commande en réseau application sur moteur DC
143
unité qui s’effectue dés l’instant zéro, son amplitude étant 1, que l’on visualise en plus de la
vitesse angulaire )(t et le courant ia(t).
Le schéma fonctionnel détaillé correspond aux équations est comme suit :
Figure V.11 : le schéma fonctionnel du model proposé
Les paramètres du moteur testés avec Simulink données comme suit :
Rm = 1.3; % Resistance d'induit
l = 0.0013; % Inductance d'induit
k = 0.26; % Constante de couple
j = 0.0011; % kg.m^2/s^2 Moment d'inertie
b = 0.24; % coefficient de frottement visqueux (Nms/rad)
Les paramètres des deux Fonctions de transfert du moteur simulé sur Simulink :
numGa1 = 1/Ra;
denGa1 = [ La/Ra , 1 ] ;
numGa2 = 1/ Rf ;
denGa2 = [ J/Rf , 1 ] ;
Chapitre V commande en réseau application sur moteur DC
143
unité qui s’effectue dés l’instant zéro, son amplitude étant 1, que l’on visualise en plus de la
vitesse angulaire )(t et le courant ia(t).
Le schéma fonctionnel détaillé correspond aux équations est comme suit :
Figure V.11 : le schéma fonctionnel du model proposé
Les paramètres du moteur testés avec Simulink données comme suit :
Rm = 1.3; % Resistance d'induit
l = 0.0013; % Inductance d'induit
k = 0.26; % Constante de couple
j = 0.0011; % kg.m^2/s^2 Moment d'inertie
b = 0.24; % coefficient de frottement visqueux (Nms/rad)
Les paramètres des deux Fonctions de transfert du moteur simulé sur Simulink :
numGa1 = 1/Ra;
denGa1 = [ La/Ra , 1 ] ;
numGa2 = 1/ Rf ;
denGa2 = [ J/Rf , 1 ] ;
Chapitre V commande en réseau application sur moteur DC
143
unité qui s’effectue dés l’instant zéro, son amplitude étant 1, que l’on visualise en plus de la
vitesse angulaire )(t et le courant ia(t).
Le schéma fonctionnel détaillé correspond aux équations est comme suit :
Figure V.11 : le schéma fonctionnel du model proposé
Les paramètres du moteur testés avec Simulink données comme suit :
Rm = 1.3; % Resistance d'induit
l = 0.0013; % Inductance d'induit
k = 0.26; % Constante de couple
j = 0.0011; % kg.m^2/s^2 Moment d'inertie
b = 0.24; % coefficient de frottement visqueux (Nms/rad)
Les paramètres des deux Fonctions de transfert du moteur simulé sur Simulink :
numGa1 = 1/Ra;
denGa1 = [ La/Ra , 1 ] ;
numGa2 = 1/ Rf ;
denGa2 = [ J/Rf , 1 ] ;
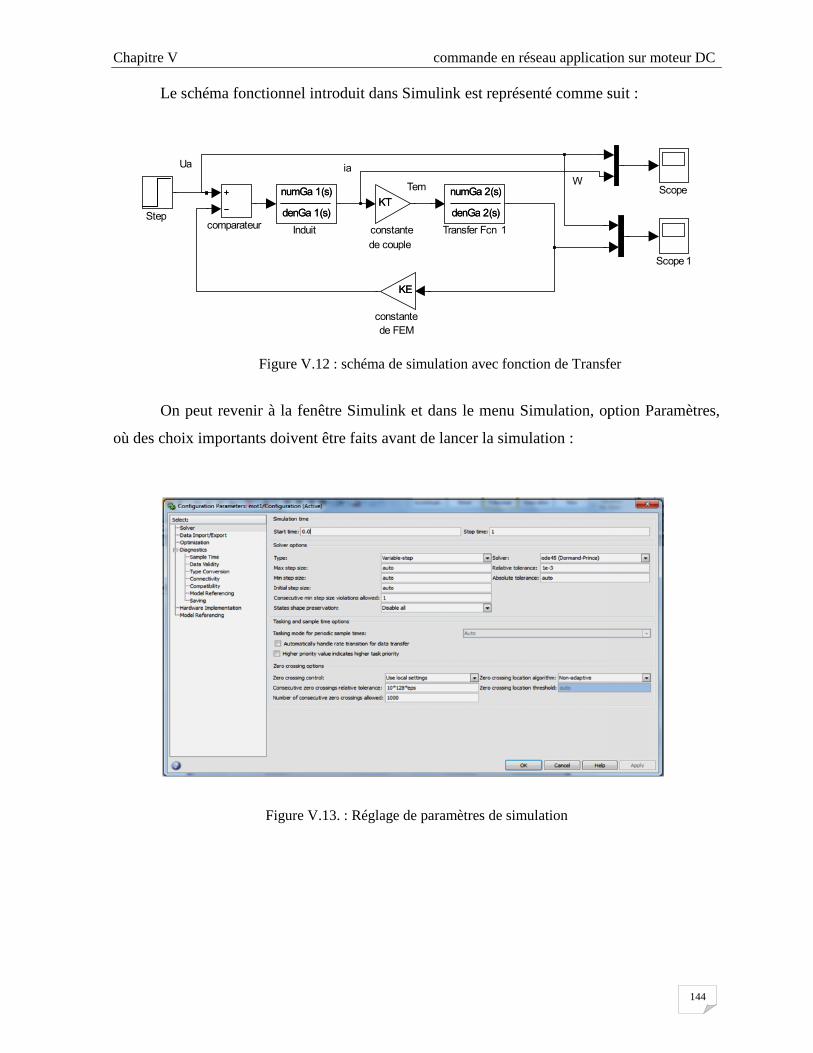
Chapitre V commande en réseau application sur moteur DC
144
Le schéma fonctionnel introduit dans Simulink est représenté comme suit :
Figure V.12 : schéma de simulation avec fonction de Transfer
On peut revenir à la fenêtre Simulink et dans le menu Simulation, option Paramètres,
où des choix importants doivent être faits avant de lancer la simulation :
Figure V.13. : Réglage de paramètres de simulation
UaWTem
ia
constantede couple
KT
constantede FEM
KE
comparateur Transfer Fcn 1
numGa 2(s)
denGa 2(s)Step
Scope 1
Scope
Induit
numGa 1(s)
denGa 1(s)
Chapitre V commande en réseau application sur moteur DC
144
Le schéma fonctionnel introduit dans Simulink est représenté comme suit :
Figure V.12 : schéma de simulation avec fonction de Transfer
On peut revenir à la fenêtre Simulink et dans le menu Simulation, option Paramètres,
où des choix importants doivent être faits avant de lancer la simulation :
Figure V.13. : Réglage de paramètres de simulation
UaWTem
ia
constantede couple
KT
constantede FEM
KE
comparateur Transfer Fcn 1
numGa 2(s)
denGa 2(s)Step
Scope 1
Scope
Induit
numGa 1(s)
denGa 1(s)
Chapitre V commande en réseau application sur moteur DC
144
Le schéma fonctionnel introduit dans Simulink est représenté comme suit :
Figure V.12 : schéma de simulation avec fonction de Transfer
On peut revenir à la fenêtre Simulink et dans le menu Simulation, option Paramètres,
où des choix importants doivent être faits avant de lancer la simulation :
Figure V.13. : Réglage de paramètres de simulation
UaWTem
ia
constantede couple
KT
constantede FEM
KE
comparateur Transfer Fcn 1
numGa 2(s)
denGa 2(s)Step
Scope 1
Scope
Induit
numGa 1(s)
denGa 1(s)
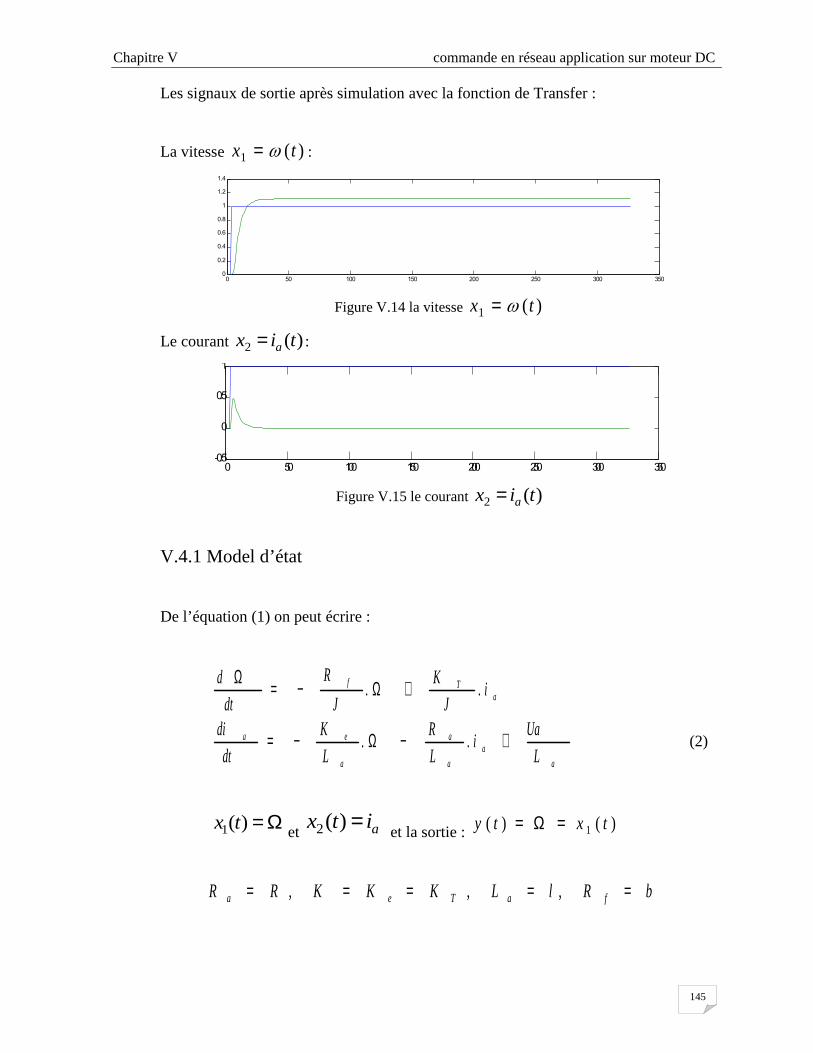
Chapitre V commande en réseau application sur moteur DC
145
Les signaux de sortie après simulation avec la fonction de Transfer :
La vitesse )(1 tx = :
Figure V.14 la vitesse )(1 tx =
Le courant )(2 tix a= :
Figure V.15 le courant )(2 tix a=
V.4.1 Model d’état
De l’équation (1) on peut écrire :
aa
a
a
a
ea
aTf
L
Uai
L
R
L
K
dt
di
iJ
K
J
R
dt
d
+−Ω−=
+Ω−=Ω
..
..
(2)
Ω=)(1 tx et aitx =)(2 et la sortie : )()( 1 txty =Ω=
bRlLKKKRR faTea ===== ,,,
0 50 100 150 200 250 300 3500
0.2
0.4
0.6
0.8
1
1.2
1.4
0 50 100 150 200 250 300 350-0.5
0
0.5
1

Chapitre V commande en réseau application sur moteur DC
146
D’où le model d’état s’écrit comme suit :
=
Ω)(
)(
2
1
tx
tx
dt
d
idt
d
a
L’espace d’état du système est décrit comme suit :
=+=
)()(
)()()(
tCxty
tButAxtx
Avec les matrices A, B et C :
−−
+−=
l
R
l
KJ
K
J
b
Ae
T
,
=
lB 1
0
,[ ]01=C
Ce Moteur DC correspond bien sûr au processus esclave à commander à distance a
travers le réseau de communication internet en injectant un commande observée.
V.5. Simulation
On suit alors le mode opératoire proposé précédemment. Les caractéristiques du retard
de transmission combiné avec l’échantillonnage conduisent aux valeurs (en secondes)
h1=h2=0.37s et μ1 = μ2= 0.11s correspondant à la notation (5.10).
V.5.1 Calcule du gain L de l’observateur
Le théorème 5.2 appliqué au système (5.29) assure la convergence exponentielle de
l’observateur vers la solution e(t) = 0 avec un taux α = 0.8 (obtenu pour ε =2.40) pour le gain
d’observateur suivant :

Chapitre V commande en réseau application sur moteur DC
147
Avec les paramètres de réglages :
mu1=0.11mu2=mu1
h1 =0.37h2=h1psi=2.4alpha=0.8
les états non observables sont calculés avec la commande : unobserv = 0
la matrice P est donnée par :
=2.05131.1473-
1.1473-2.3367P
Valeurs propres de : P = [1.0379, 3.3502]
=1.0135-
5.1069-003eQ
=0.4960-
1.9920-W
Le gain de l’observateur est donné par :
=0.9906-
1.3388-L

Chapitre V commande en réseau application sur moteur DC
148
V.5.2 Calcule du gain K de la commande
Le théorème 5.3 appliqué à (5.34) garantit que la loi de commande par retour d’état
stabilisera exponentiellement le système vers sa consigne, avec un taux α = 0.8 (obtenu pour :
ε= 2.40), pour le gain K suivant :
Après exécution du programme (Annexe 2 ) dans Matlab les résultats d’exécution sont
donnés par :
Avec les valeurs de paramétrages suivants:
mu1=0.11;mu2=mu1;h1 =0.37;h2=h1;psi=2.4;alpha=0.8;
le nombre des états non commandables est donné par : uncomd = 0
la matrice P pour calculer le gain K est calculée comme suit :
la matrice P est donnée par :
=0.85540.8571-
0.8571-2.3486005eP
Valeurs propres de [ ]2.73870.4635005eP =
[ ]17961-19918-=W
Le gain K est calculé donc :
[ ]0.4650-0.2545-=k

Chapitre V commande en réseau application sur moteur DC
149
Enfin le théorème 2.1 garantit la stabilité du système complet (5.42) avec les gains L et
K calculés ci-dessus. Le taux garanti est finalement de α = 0.8.
V.5.3 modalisation du retard
La simulation sur figures montre des résultats obtenus avec des retards de la forme :
)sin(3.0)()( ttt iiii += .
Le paramètre i représentent la fréquence de la partie variable des retards, l’état en
continu de l’observateur )(ˆ tx est appliqué au calcule de la commande. La consigne
appliquée est un signal en forme échelon unité.
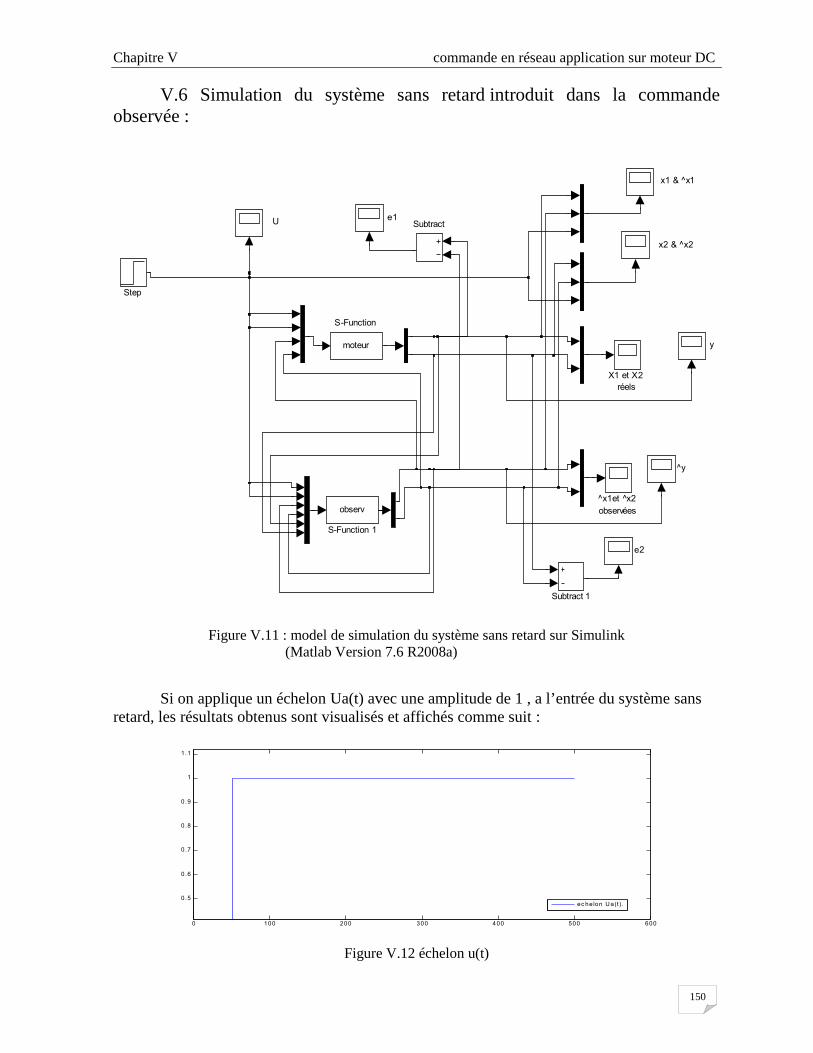
Chapitre V commande en réseau application sur moteur DC
150
V.6 Simulation du système sans retard introduit dans la commandeobservée :
Figure V.11 : model de simulation du système sans retard sur Simulink(Matlab Version 7.6 R2008a)
Si on applique un échelon Ua(t) avec une amplitude de 1 , a l’entrée du système sansretard, les résultats obtenus sont visualisés et affichés comme suit :
Figure V.12 échelon u(t)
e2
^y
^x1et ^x2observées
X1 et X2réels
Subtract 1
Subtract
Step
S-Function 1
observ
S-Function
moteur y
e1
x1 & ^x1
x2 & ^x2
U
0 100 200 300 400 500 600
0.5
0.6
0.7
0.8
0.9
1
1.1
ec he lon U a(t ).
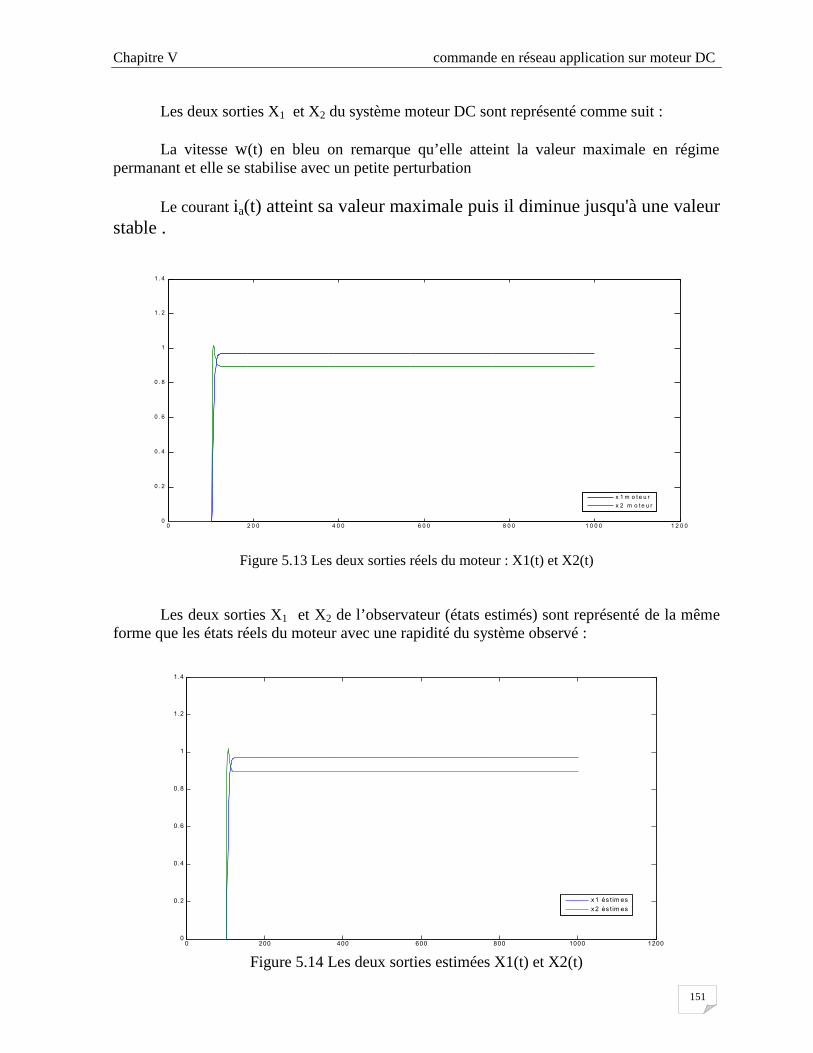
Chapitre V commande en réseau application sur moteur DC
151
Les deux sorties X1 et X2 du système moteur DC sont représenté comme suit :
La vitesse w(t) en bleu on remarque qu’elle atteint la valeur maximale en régimepermanant et elle se stabilise avec un petite perturbation
Le courant ia(t) atteint sa valeur maximale puis il diminue jusqu'à une valeurstable .
Figure 5.13 Les deux sorties réels du moteur : X1(t) et X2(t)
Les deux sorties X1 et X2 de l’observateur (états estimés) sont représenté de la mêmeforme que les états réels du moteur avec une rapidité du système observé :
Figure 5.14 Les deux sorties estimées X1(t) et X2(t)
0 2 0 0 4 0 0 6 0 0 8 0 0 1 0 0 0 1 2 0 00
0 . 2
0 . 4
0 . 6
0 . 8
1
1 . 2
1 . 4
x 1 m o t e u rx 2 m o t e u r
0 200 400 600 800 1000 12000
0.2
0.4
0.6
0.8
1
1.2
1.4
x 1 és t im esx 2 és t im es
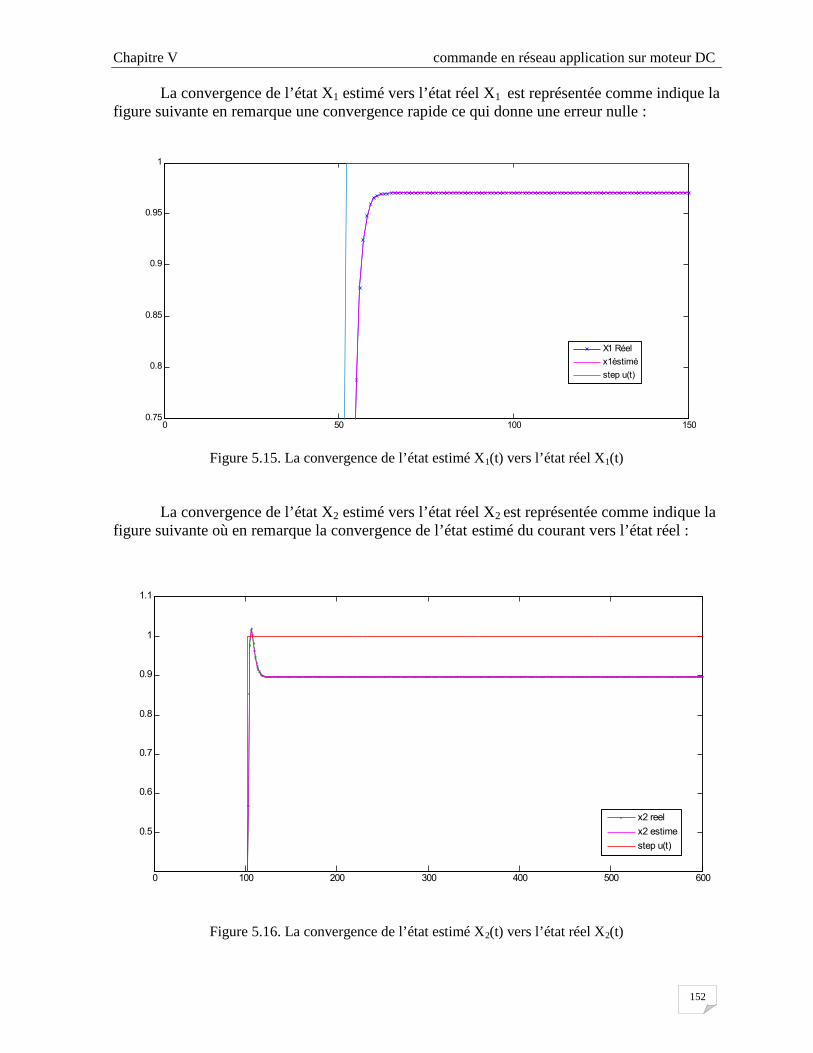
Chapitre V commande en réseau application sur moteur DC
152
La convergence de l’état X1 estimé vers l’état réel X1 est représentée comme indique lafigure suivante en remarque une convergence rapide ce qui donne une erreur nulle :
Figure 5.15. La convergence de l’état estimé X1(t) vers l’état réel X1(t)
La convergence de l’état X2 estimé vers l’état réel X2 est représentée comme indique lafigure suivante où en remarque la convergence de l’état estimé du courant vers l’état réel :
Figure 5.16. La convergence de l’état estimé X2(t) vers l’état réel X2(t)
0 50 100 1500.75
0.8
0.85
0.9
0.95
1
X1 Réelx1éstiméstep u(t)
0 100 200 300 400 500 600
0.5
0.6
0.7
0.8
0.9
1
1.1
x2 reelx2 estimestep u(t)
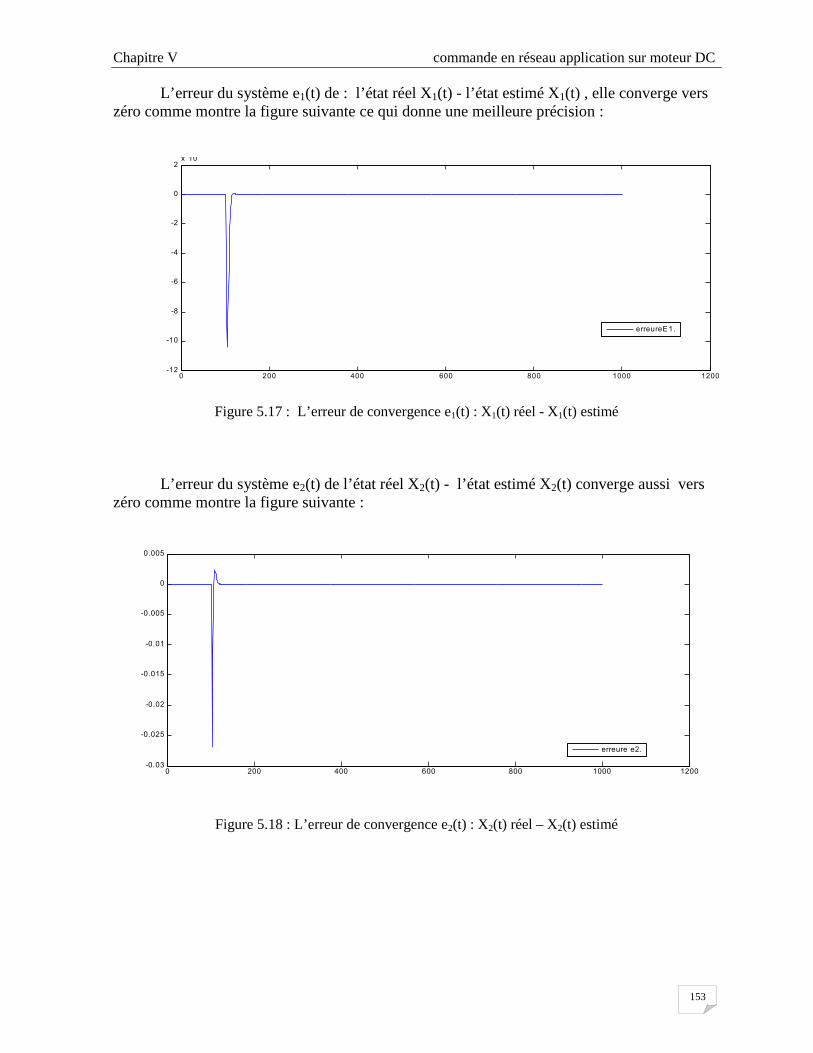
Chapitre V commande en réseau application sur moteur DC
153
L’erreur du système e1(t) de : l’état réel X1(t) - l’état estimé X1(t) , elle converge verszéro comme montre la figure suivante ce qui donne une meilleure précision :
Figure 5.17 : L’erreur de convergence e1(t) : X1(t) réel - X1(t) estimé
L’erreur du système e2(t) de l’état réel X2(t) - l’état estimé X2(t) converge aussi verszéro comme montre la figure suivante :
Figure 5.18 : L’erreur de convergence e2(t) : X2(t) réel – X2(t) estimé
0 200 400 600 800 1000 1200-12
-10
-8
-6
-4
-2
0
2x 10 -3
erreureE 1.
0 200 400 600 800 1000 1200-0.03
-0.025
-0.02
-0.015
-0.01
-0.005
0
0.005
erreure e2.
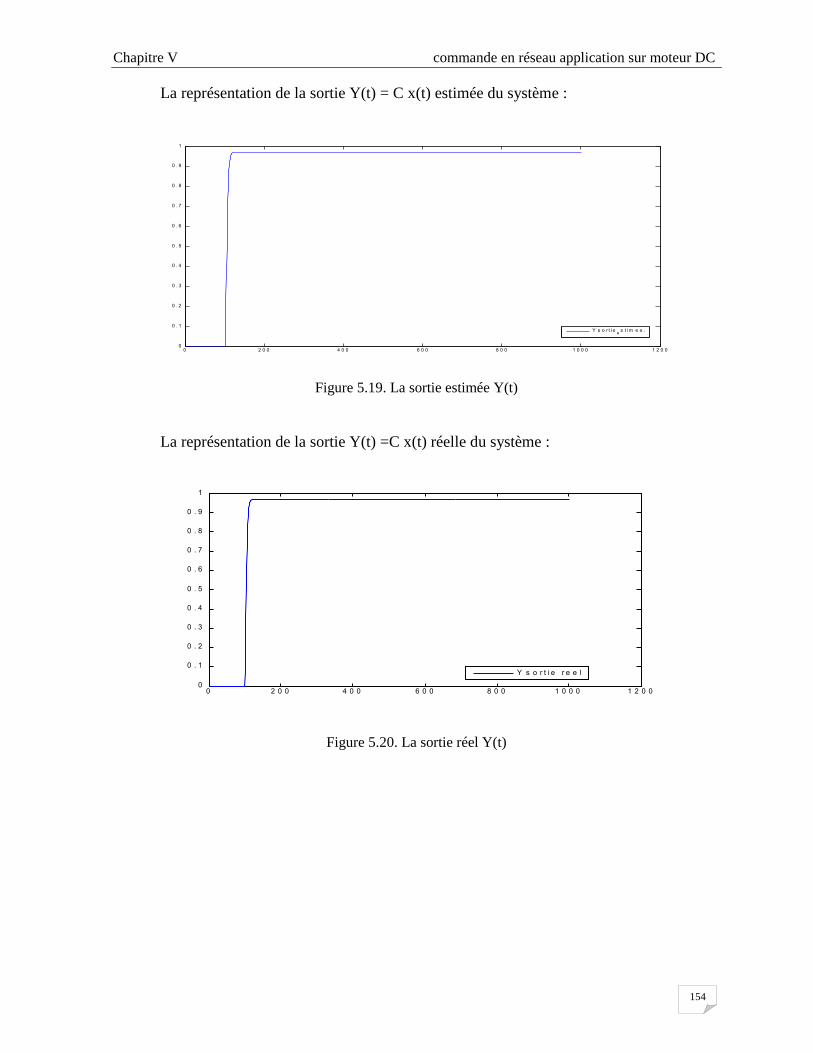
Chapitre V commande en réseau application sur moteur DC
154
La représentation de la sortie Y(t) = C x(t) estimée du système :
Figure 5.19. La sortie estimée Y(t)
La représentation de la sortie Y(t) =C x(t) réelle du système :
Figure 5.20. La sortie réel Y(t)
0 2 0 0 4 0 0 6 0 0 8 0 0 1 0 0 0 1 2 0 00
0 . 1
0 . 2
0 . 3
0 . 4
0 . 5
0 . 6
0 . 7
0 . 8
0 . 9
1
Y s o r t i e e s t i m e e .
0 2 0 0 4 0 0 6 0 0 8 0 0 1 0 0 0 1 2 0 00
0 . 1
0 . 2
0 . 3
0 . 4
0 . 5
0 . 6
0 . 7
0 . 8
0 . 9
1
Y s o r t i e r e e l
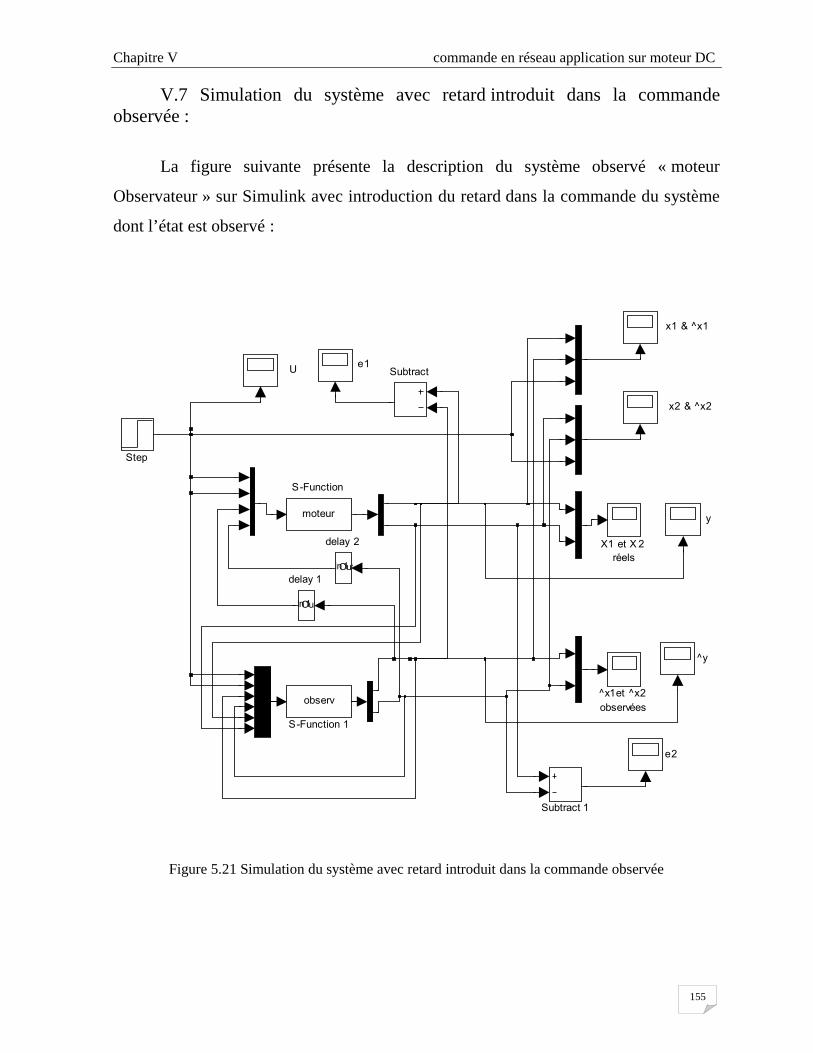
Chapitre V commande en réseau application sur moteur DC
155
V.7 Simulation du système avec retard introduit dans la commandeobservée :
La figure suivante présente la description du système observé « moteur
Observateur » sur Simulink avec introduction du retard dans la commande du système
dont l’état est observé :
Figure 5.21 Simulation du système avec retard introduit dans la commande observée
e2
delay 2
In1Out1delay 1
In1Out1
^y
^x1et ^x2observées
X1 et X 2réels
Subtract 1
Subtract
Step
S-Function 1
observ
S-Function
moteur y
e1
x1 & ^x1
x2 & ^x2
U
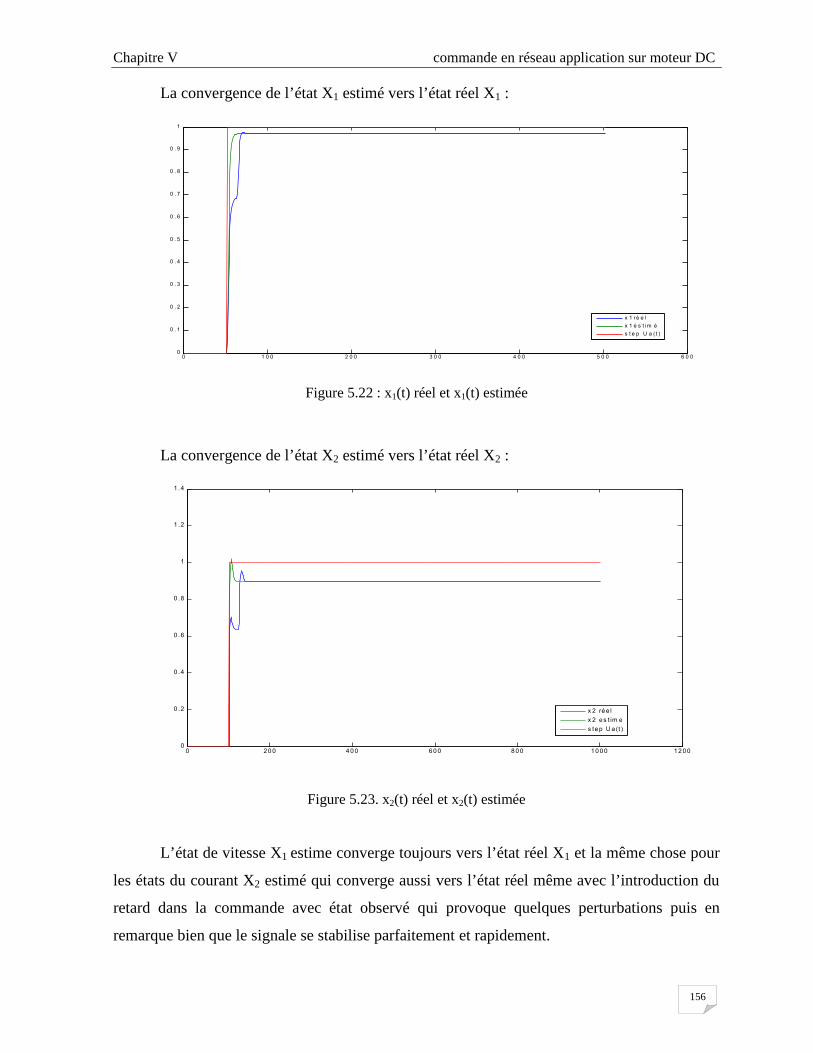
Chapitre V commande en réseau application sur moteur DC
156
La convergence de l’état X1 estimé vers l’état réel X1 :
Figure 5.22 : x1(t) réel et x1(t) estimée
La convergence de l’état X2 estimé vers l’état réel X2 :
Figure 5.23. x2(t) réel et x2(t) estimée
L’état de vitesse X1 estime converge toujours vers l’état réel X1 et la même chose pour
les états du courant X2 estimé qui converge aussi vers l’état réel même avec l’introduction du
retard dans la commande avec état observé qui provoque quelques perturbations puis en
remarque bien que le signale se stabilise parfaitement et rapidement.
0 1 0 0 2 0 0 3 0 0 4 0 0 5 0 0 6 0 00
0 . 1
0 . 2
0 . 3
0 . 4
0 . 5
0 . 6
0 . 7
0 . 8
0 . 9
1
x 1 ré e lx 1 é s t im és t e p U a ( t )
0 2 0 0 4 0 0 6 0 0 8 0 0 1 0 0 0 1 2 0 00
0 .2
0 .4
0 .6
0 .8
1
1 .2
1 .4
x 2 ré e lx 2 e s t im es te p U a (t )
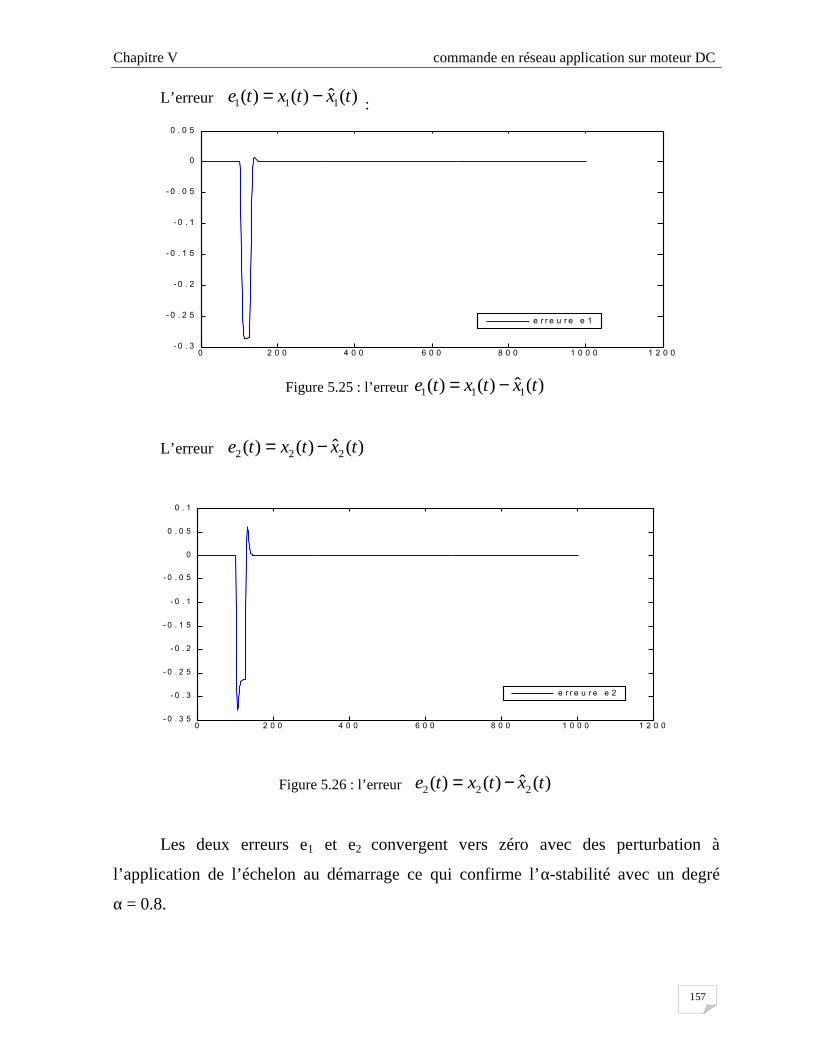
Chapitre V commande en réseau application sur moteur DC
157
L’erreur )(ˆ)()( 111 txtxte −= :
Figure 5.25 : l’erreur )(ˆ)()( 111 txtxte −=
L’erreur )(ˆ)()( 222 txtxte −=
Figure 5.26 : l’erreur )(ˆ)()( 222 txtxte −=
Les deux erreurs e1 et e2 convergent vers zéro avec des perturbation à
l’application de l’échelon au démarrage ce qui confirme l’α-stabilité avec un degré
α = 0.8.
0 2 0 0 4 0 0 6 0 0 8 0 0 1 0 0 0 1 2 0 0- 0 . 3
- 0 . 2 5
- 0 . 2
- 0 . 1 5
- 0 . 1
- 0 . 0 5
0
0 . 0 5
e r r e u r e e 1
0 2 0 0 4 0 0 6 0 0 8 0 0 1 0 0 0 1 2 0 0- 0 . 3 5
- 0 . 3
- 0 . 2 5
- 0 . 2
- 0 . 1 5
- 0 . 1
- 0 . 0 5
0
0 . 0 5
0 . 1
e r r e u r e e 2
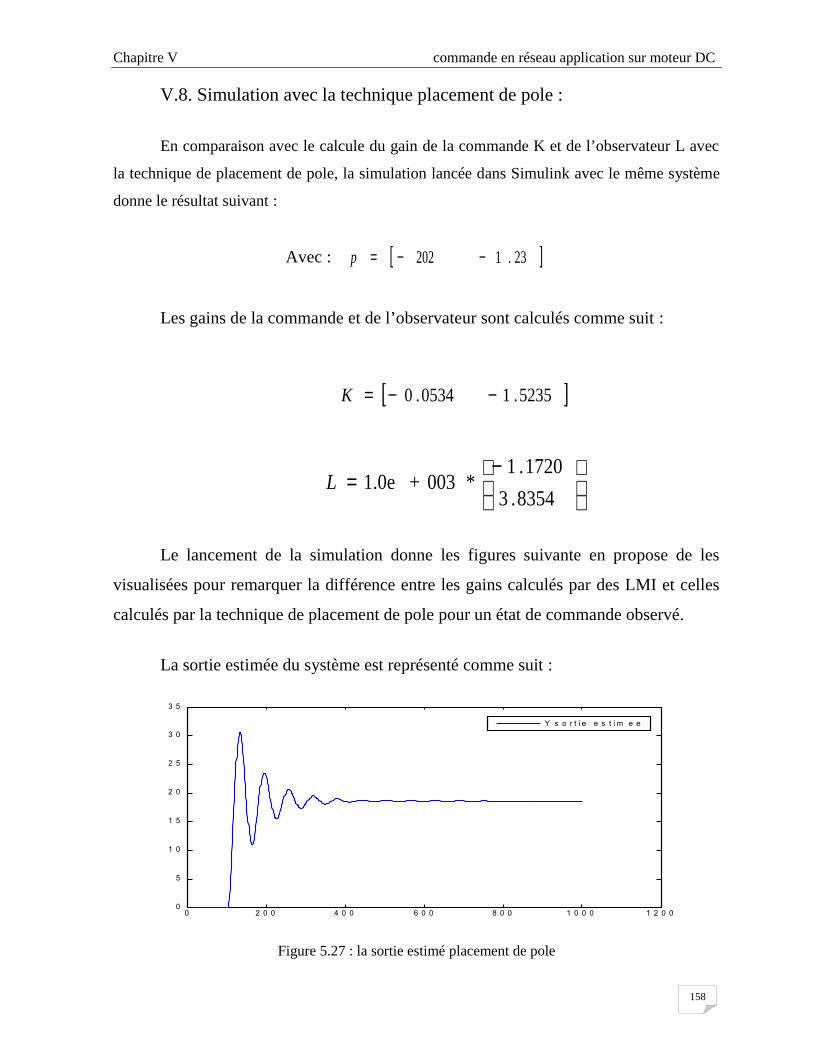
Chapitre V commande en réseau application sur moteur DC
158
V.8. Simulation avec la technique placement de pole :
En comparaison avec le calcule du gain de la commande K et de l’observateur L avec
la technique de placement de pole, la simulation lancée dans Simulink avec le même système
donne le résultat suivant :
Avec : [ ]23.1202 −−=p
Les gains de la commande et de l’observateur sont calculés comme suit :
[ ]5235.10534.0 −−=K
−=
8354.3
1720.1*003+1.0eL
Le lancement de la simulation donne les figures suivante en propose de les
visualisées pour remarquer la différence entre les gains calculés par des LMI et celles
calculés par la technique de placement de pole pour un état de commande observé.
La sortie estimée du système est représenté comme suit :
Figure 5.27 : la sortie estimé placement de pole
0 2 0 0 4 0 0 6 0 0 8 0 0 1 0 0 0 1 2 0 00
5
1 0
1 5
2 0
2 5
3 0
3 5
Y s o r t i e e s t i m e e
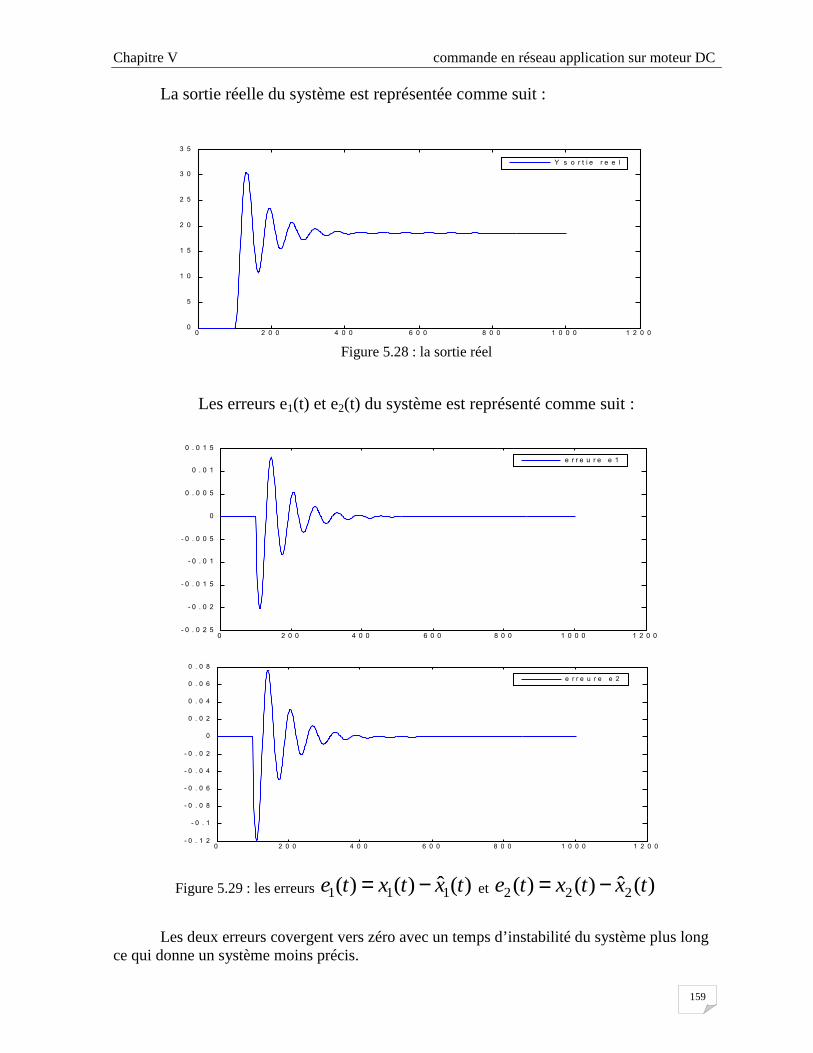
Chapitre V commande en réseau application sur moteur DC
159
La sortie réelle du système est représentée comme suit :
Figure 5.28 : la sortie réel
Les erreurs e1(t) et e2(t) du système est représenté comme suit :
Figure 5.29 : les erreurs )(ˆ)()( 111 txtxte −= et )(ˆ)()( 222 txtxte −=
Les deux erreurs covergent vers zéro avec un temps d’instabilité du système plus longce qui donne un système moins précis.
0 2 0 0 4 0 0 6 0 0 8 0 0 1 0 0 0 1 2 0 00
5
1 0
1 5
2 0
2 5
3 0
3 5
Y s o r t i e r e e l
0 2 0 0 4 0 0 6 0 0 8 0 0 1 0 0 0 1 2 0 0- 0 . 0 2 5
- 0 . 0 2
- 0 . 0 1 5
- 0 . 0 1
- 0 . 0 0 5
0
0 . 0 0 5
0 . 0 1
0 . 0 1 5
e r r e u r e e 1
0 2 0 0 4 0 0 6 0 0 8 0 0 1 0 0 0 1 2 0 0- 0 . 1 2
- 0 . 1
- 0 . 0 8
- 0 . 0 6
- 0 . 0 4
- 0 . 0 2
0
0 . 0 2
0 . 0 4
0 . 0 6
0 . 0 8
e r r e u r e e 2
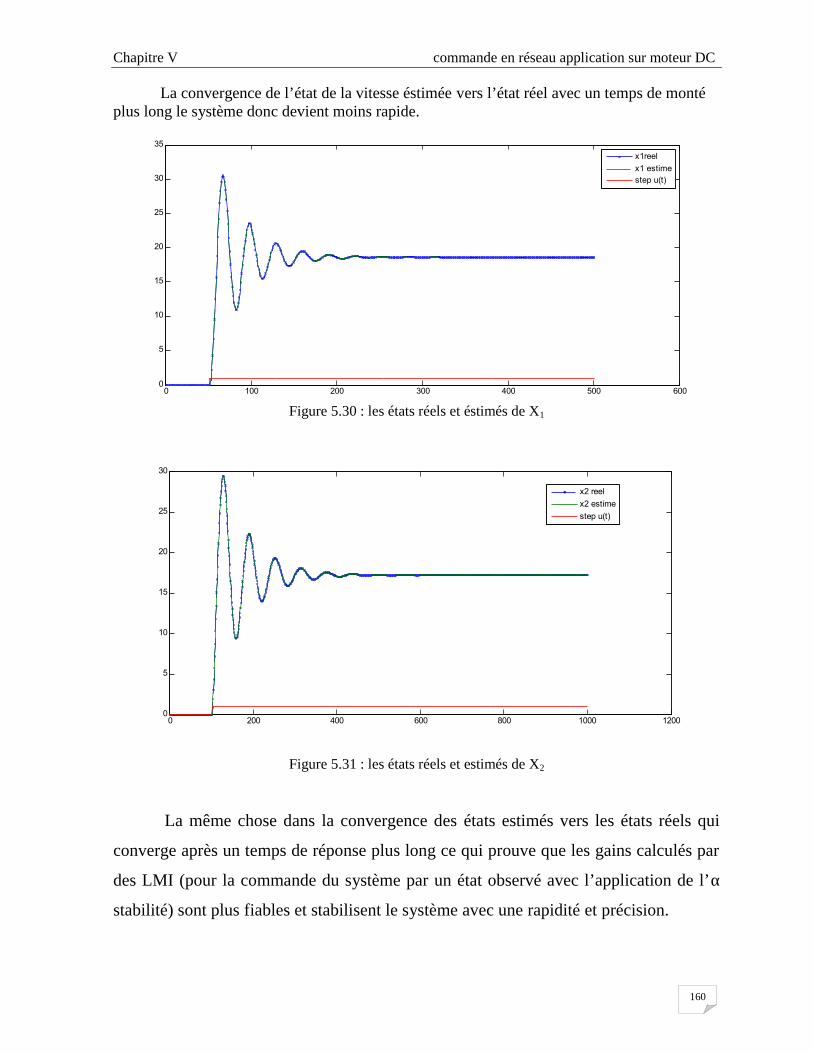
Chapitre V commande en réseau application sur moteur DC
160
La convergence de l’état de la vitesse éstimée vers l’état réel avec un temps de montéplus long le système donc devient moins rapide.
Figure 5.30 : les états réels et éstimés de X1
Figure 5.31 : les états réels et estimés de X2
La même chose dans la convergence des états estimés vers les états réels qui
converge après un temps de réponse plus long ce qui prouve que les gains calculés par
des LMI (pour la commande du système par un état observé avec l’application de l’α
stabilité) sont plus fiables et stabilisent le système avec une rapidité et précision.
0 100 200 300 400 500 6000
5
10
15
20
25
30
35x1reelx1 estimestep u(t)
0 200 400 600 800 1000 12000
5
10
15
20
25
30
x2 reelx2 estimestep u(t)
Chapitre V commande en réseau application sur moteur DC
161
Conclusion Générale
Le principe de la commande des processus est généralement par retour d’état, les
seules grandeurs accessibles du système sont les variables d’entrée et de sortie, par les quelles
on peut reconstruire l’état du modèle choisi.
Un reconstructeur d’état ou estimateur est un système ayant comme entrées les
entrées et les sorties du processus réel, la sortie est une estimation de l’état du processus
Ce mémoire, a étudié l’analyse des problèmes apparaissant dans la commande a
distance a travers le réseau de communication « internet » entre les différents agents maitre et
esclave. La principale difficulté aperçue dans ce type de problèmes est de pouvoir calculer les
gains de la commande K et de l’observateur L d’une façon à stabilisé le système dans
l'existence du retards variable induits par la transmission des lois de commande dans le réseau
et de l’échantillonnage des informations qui circulent du maitre vers l’esclave.
Les réseaux de communication génèrent des perturbations qui perturbent le système à
commander en forme de retard, de pertes de données, … qui doivent être prises en compte
dans la boucle de régulation du système de commande par retour d’état.
Le protocole UDP Contrairement au TCP, il travaille en mode non-connecté donc il ne
garanti aucun contrôle de flux ni contrôle de congestion. C'est pour cela qu'il est décrit comme
étant un protocole non-fiable. TCP impose d'attendre qu'un paquet perdu soit réémis et
réceptionne, en termes de retards, UDP sera plus fiable que TCP.
Les retards de transmission sont fréquemment la cause d'une dégradation de
performances.
Nous avons présenté le contexte des systèmes à retards. Leur apparition fréquente dans
la modélisation des phénomènes physiques.
Chapitre V commande en réseau application sur moteur DC
162
L'α-stabilité (ou stabilité exponentielle à taux α garanti) est une propriété de
performance en rapidité et il est intéressant de l'étudier dans des cas réalistes de
fonctionnement.
L’idée principale de cette commande consiste finalement à concevoir un Maître qui
travaille en temps continu alors que l’esclave applique une commande discrétisée et délivre
une sortie échantillonnée.
L’observateur situé au niveau du Maître pour des raisons de coût ou de danger, produit
une estimation de l’état du processus esclave alors qu’il ne reçoit de ce dernier qu’une
information échantillonnée.
Le control à distance est une solution pour pouvoir réaliser sans danger des taches en
temps réel dans un environnement difficile et qui nécessite un échantillonnage des sorties
capteur et actionneurs et des commandes générées. Où la technologie « Internet » apparaît
comme un moyen de communication fiable et peu couteux.
Dans la partie simulation les résultats théoriques présentés dans ce mémoire trouvent
finalement la justification. La simulation est réalisée sur un moteur électrique DC (à courant
continu) à excitation séparée à travers un réseau Internet, tout en rendant le system presque
linéaire pour facilité l’étude et la simulation de l’esclave.
La visualisation des graphes dans les premières secondes on peut remarquer l’effet de
convergence de l’observateur vers l’état réel. Après ce transitoire, le suivi de consigne est de
meilleure qualité. Et après introduction du retard dans le modèle à commandé le système doit
se stabilise exponentiellement avec un degré de convergence α avec l’erreur d’estimation
)(ˆ)()( 222 txtxte −= qui tende vers zéros
Le calcule des gains L de l’observateur et K de la commande réalisé avec l’application
des théorèmes des LMI donne de bonne résultats de stabilité exponentielle à taux α garanti
même avec la présence des retards due au réseau de communication et de l’échantillonnage. Et
Chapitre V commande en réseau application sur moteur DC
163
même avec celles calculés par la technique de placement de pole utilisée à titre de
comparaison.
La difficulté rencontrée est celle d’écrire les matrices des LMI en posant les termes des
matrices pour vérifier les conditions de faisabilité des LMI dans Matlab.
L’utilisation des Toolboxs dans le logiciel Matlab donne une très grande flexibilité
dans un environnement de travail riche d’outils nécessaires a la simulation dans le domaine
automatique, le calcule et la visualisation des résultats.
Ces techniques de calcule des LMI et de simulation pour calculer théoriquement ces
gains et les introduisant dans la commande par retour d’état observé ouvre une grande vision
pour les recherches dans les domaines d’étude des systèmes complexes , couteux et même
pour les systèmes non linéaires complexes qui porte de linéarité lourde. A fin de garantir une
stabilité exponentielle avec degré de convergence α garantie du système complet.
Espérons dans l’avenir que modeste travail de recherche sera considérer comme une
plate forme pour d’autres recherches et pour pouvoir trouver de solutions aux problèmes de
commande des systèmes linéaires et non linéaires avec retard.

Annexe I Les inégalités matricielles linéaires (LMI)
164
I. Analyse convexe et inégalités linéaires matricielles
I.1. Analyse convexe
La notion de convexité tient dans ce mémoire une place importante étant donnée les
orientations choisies. En effet, les problèmes d’analyse et de synthèse dont il est question sont
formulés, lorsque cela est possible, en termes d’optimisation convexe [1]. La convexité d’un
problème d’optimisation a un double avantage :
– les temps de calcul pour trouver une solution sont raisonnables ;
– il n’existe pas de minimum local de la fonction à optimiser ; le résultat obtenu correspond à
un minimum global unique.
La convexité est une notion à la fois ensembliste et fonctionnelle, voici les définitions dans
chacun des cas.
Définition 1 : ensemble convexe. Soit un ensemble ,nR⊂ est un ensemble convexe si
et seulement si :
[ ] ( ) ∈−+∈∀⊂∈∀ 212
21 )1(,,,10 xxxxR (A.1.1)
Définition 2 : fonction convexe. Soit une fonction f : RRn →⊂ avec ensemble
convexe, alors f est convexe si et seulement si :
[ ] ( ) )()1()())1((,,,10 21212
21 xfxfxxfxxR −+≤−+∈∀⊂∈∀ (A.1.2)
Les inégalités matricielles linéaires (LMI)
165
I.2. Les inégalités matricielles linéaires :(abréviation anglaise d'Inégalité
Matricielle Linéaire).
I.2.1. Introduction :
L’inégalité matricielle linéaire (LMI) et les techniques de LMI sont apparues comme outils
puissants de conception dans des domaines allant de l'ingénierie au système de contrôle,
d'identification et de conception structurale. Trois facteurs rendent les techniques des LMI attirante:
1- Une variété de spécifications de conception et les contraintes peuvent être exprimées en
LMI.
2- Une fois formulées en termes de LMI, le problème peut être résolu exactement par
l’efficacité des algorithmes d'optimisation convexe (les «solveurs LMI»).
3- Alors que la plupart des problèmes avec de multiples contraintes en termes d'équations
matricielle, ils restent souvent traitable dans le cadre LMI. Cela rend la conception LMI
basée sur une alternative intéressante aux méthodes "d'analyse" classiques.
Dans Matlab Le LMI Control Toolbox met en œuvre l'état d’art des « LMI
solvers ». Ces solveurs sont nettement plus rapides que les algorithmes d'optimisation convexe
classique, il faut garder à l'esprit que la complexité du calcule des LMI demeure supérieur à celui de
résoudre, par exemple, une équation de Riccati.
Par exemple, des problèmes de conception avec un millier de variables tiennent
généralement sur une heure sur les stations de travail d'aujourd'hui. Toutefois, les recherches sur
l'optimisation des LMI sont encore très actives et visent à une meilleure amélioration [45].
I.3. Un brève historique des LMI en théorie du contrôle
L'histoire des LMI dans l'analyse des systèmes dynamiques remonte à plus de 100
ans. L'histoire commence vers 1890, quand Lyapunov publia son ouvrage fondamental :

Les inégalités matricielles linéaires (LMI)
166
l'introduction de ce qu'on appelle aujourd'hui « Lyapunov théorie ». Il a montré que l’équation
différentielle :
)()(
tAxdt
tdx = (A.1.3)
Est stable (i.e. toutes les trajectoires convergent ver zéro) si et seulement si il existe une
matrice définie positive P telle que :
0<PAPA T + (A.1.4)
L'exigence P > 0, ATP + PA < 0 est ce que nous appelons aujourd'hui une inégalité de
Lyapunov sur P, qui est une forme particulière de LMI. Lyapunov a également montré que cette
LMI pourrait être explicitement résolus.
En effet, on peut choisir n'importe quelle QT= Q > 0, puis résoudre les équations linéaires :
AT×P + P×A = - Q pour la matrice P, qui est garantie d'être définie positif si le système (1.3) est
stable.
En résumé, la première LMI utilisée pour analyser la stabilité d'un système dynamique est
l'inégalité de Lyapunov (1.4), qui peuvent être résolues de manière analytique (par résolution d'un
ensemble d'équations linéaires).
I.3.1. Formulation du problème
L'idée de base de la méthode LMI est de formuler un problème (par exemple, la stabilité en
boucle fermée avec ou sans contraintes supplémentaires) comme un problème d'optimisation avec
un objectif linéaire et des contraintes LMI.
Une contrainte LMI sur un vecteur variable x de Rn est de la forme [125] :
0)(10 ≥+= ∑ = i
n
i i FxFxF(A.1.5)
Les inégalités matricielles linéaires (LMI)
167
Ou les matrices symétriques niRFF NNTi ::;;0, =∈= × sont données.
La notation suivante 0)F0(ou> ≥F signifie que la matrice F est définie positive
(respectivement F semi-définie positive). La contrainte 0F(x) ≥ est une contrainte convexe en x,
c'est-à-dire que l'ensemble 0F(x):Rx n ≥∈ est convexe. On dit que la LMI (A.1.5) est faisable
si et seulement s'il existe au moins un vecteur nRx ∈ teleque l'inégalité matricielle (A.1.5) est
vérifiée.
Définition 1. Une LMI est une inégalité matricielle de la forme
0>)(1
BFxxF i
n
i i += ∑ = (1.5)
Où les matrices niF i ,1, = et B sont des matrices symétriques de dimension n, et x est un
vecteur de Rn.
On peut remarquer que l’ensemble : 0F(x):Rx n ≥∈ est un ensemble convexe. C’est
pourquoi une LMI peut être considérée comme une contrainte convexe.
Nous devons résoudre à plusieurs reprises un des problèmes d’optimisation convexe
exprimés sous la forme de LMI, à savoir le problème de réalisabilité.
Définition 2 (Problème de réalisabilité) : Il s’agit de trouver un vecteur x tel que la
contrainte 0>)(xF soit satisfaite. Ce problème peut être résolu en cherchant le vecteur x
minimisant le scalaire t de telle sorte que :
nIt<)( ×xF (A.1.6)
Si la valeur minimale de t est négative, alors le problème (définition 1) est réalisable. Il
existe plusieurs algorithmes de résolution numérique de telles LMI.
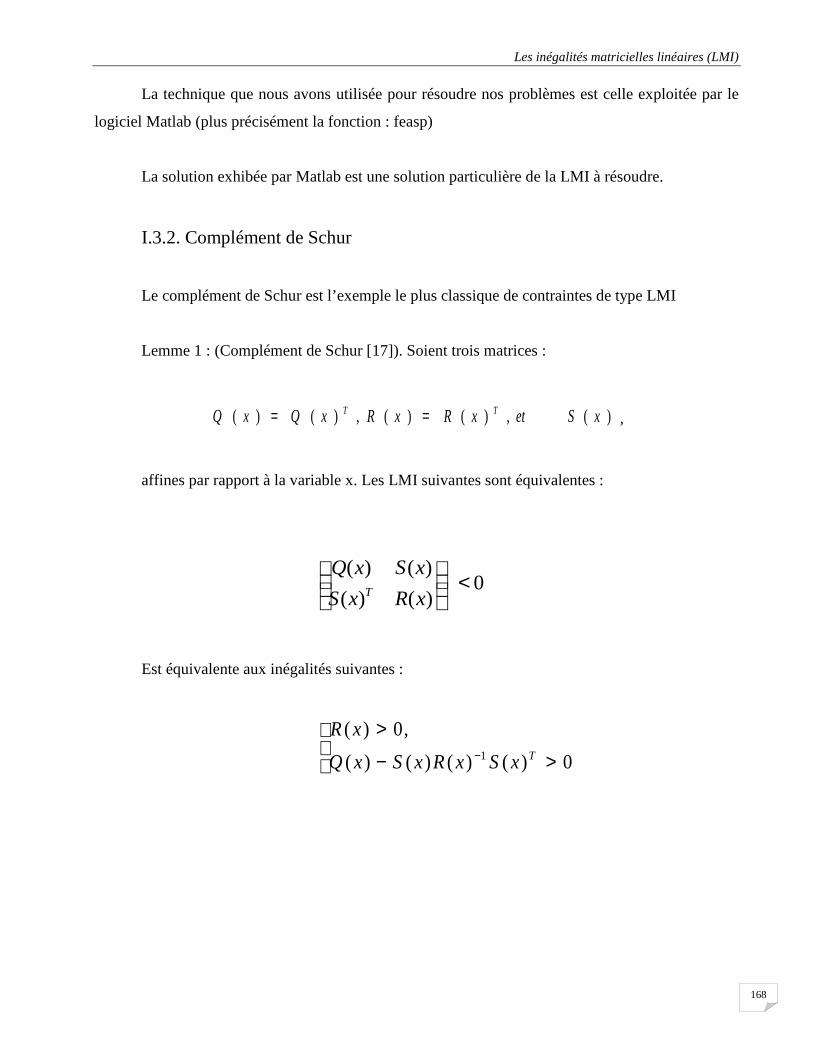
Les inégalités matricielles linéaires (LMI)
168
La technique que nous avons utilisée pour résoudre nos problèmes est celle exploitée par le
logiciel Matlab (plus précisément la fonction : feasp)
La solution exhibée par Matlab est une solution particulière de la LMI à résoudre.
I.3.2. Complément de Schur
Le complément de Schur est l’exemple le plus classique de contraintes de type LMI
Lemme 1 : (Complément de Schur [17]). Soient trois matrices :
)(,)()(,)()( xSetxRxRxQxQ TT == ,
affines par rapport à la variable x. Les LMI suivantes sont équivalentes :
0)()(
)()(<
xRxS
xSxQT
Est équivalente aux inégalités suivantes :
>−>
− 0)()()()(
,0)(1 TxSxRxSxQ
xR
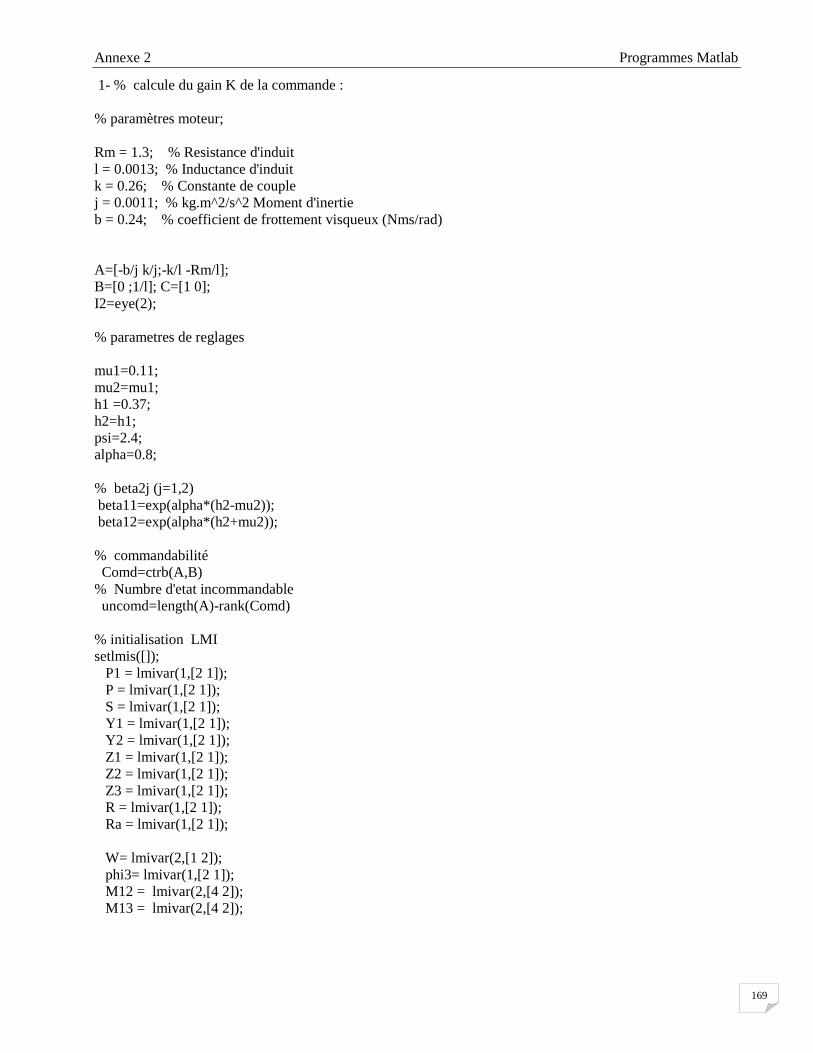
Annexe 2 Programmes Matlab
169
1- % calcule du gain K de la commande :
% paramètres moteur;
Rm = 1.3; % Resistance d'induitl = 0.0013; % Inductance d'induitk = 0.26; % Constante de couplej = 0.0011; % kg.m^2/s^2 Moment d'inertieb = 0.24; % coefficient de frottement visqueux (Nms/rad)
A=[-b/j k/j;-k/l -Rm/l];B=[0 ;1/l]; C=[1 0];I2=eye(2);
% parametres de reglages
mu1=0.11;mu2=mu1;h1 =0.37;h2=h1;psi=2.4;alpha=0.8;
% beta2j (j=1,2)beta11=exp(alpha*(h2-mu2));beta12=exp(alpha*(h2+mu2));
% commandabilitéComd=ctrb(A,B)
% Numbre d'etat incommandableuncomd=length(A)-rank(Comd)
% initialisation LMIsetlmis([]);
P1 = lmivar(1,[2 1]);P = lmivar(1,[2 1]);S = lmivar(1,[2 1]);Y1 = lmivar(1,[2 1]);Y2 = lmivar(1,[2 1]);Z1 = lmivar(1,[2 1]);Z2 = lmivar(1,[2 1]);Z3 = lmivar(1,[2 1]);R = lmivar(1,[2 1]);Ra = lmivar(1,[2 1]);
W= lmivar(2,[1 2]);phi3= lmivar(1,[2 1]);M12 = lmivar(2,[4 2]);M13 = lmivar(2,[4 2]);
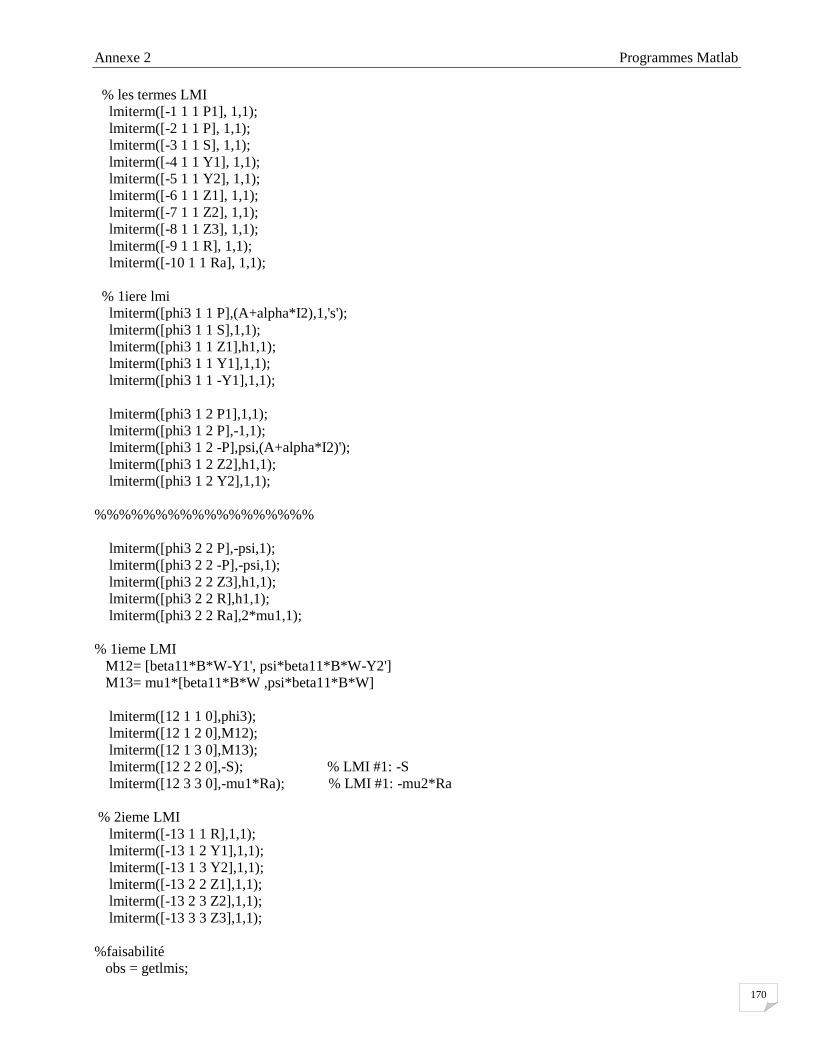
Annexe 2 Programmes Matlab
170
% les termes LMIlmiterm([-1 1 1 P1], 1,1);lmiterm([-2 1 1 P], 1,1);lmiterm([-3 1 1 S], 1,1);lmiterm([-4 1 1 Y1], 1,1);lmiterm([-5 1 1 Y2], 1,1);lmiterm([-6 1 1 Z1], 1,1);lmiterm([-7 1 1 Z2], 1,1);lmiterm([-8 1 1 Z3], 1,1);lmiterm([-9 1 1 R], 1,1);lmiterm([-10 1 1 Ra], 1,1);
% 1iere lmilmiterm([phi3 1 1 P],(A+alpha*I2),1,'s');lmiterm([phi3 1 1 S],1,1);lmiterm([phi3 1 1 Z1],h1,1);lmiterm([phi3 1 1 Y1],1,1);lmiterm([phi3 1 1 -Y1],1,1);
lmiterm([phi3 1 2 P1],1,1);lmiterm([phi3 1 2 P],-1,1);lmiterm([phi3 1 2 -P],psi,(A+alpha*I2)');lmiterm([phi3 1 2 Z2],h1,1);lmiterm([phi3 1 2 Y2],1,1);
%%%%%%%%%%%%%%%%%%
lmiterm([phi3 2 2 P],-psi,1);lmiterm([phi3 2 2 -P],-psi,1);lmiterm([phi3 2 2 Z3],h1,1);lmiterm([phi3 2 2 R],h1,1);lmiterm([phi3 2 2 Ra],2*mu1,1);
% 1ieme LMIM12= [beta11*B*W-Y1', psi*beta11*B*W-Y2']M13= mu1*[beta11*B*W ,psi*beta11*B*W]
lmiterm([12 1 1 0],phi3);lmiterm([12 1 2 0],M12);lmiterm([12 1 3 0],M13);lmiterm([12 2 2 0],-S); % LMI #1: -Slmiterm([12 3 3 0],-mu1*Ra); % LMI #1: -mu2*Ra
% 2ieme LMIlmiterm([-13 1 1 R],1,1);lmiterm([-13 1 2 Y1],1,1);lmiterm([-13 1 3 Y2],1,1);lmiterm([-13 2 2 Z1],1,1);lmiterm([-13 2 3 Z2],1,1);lmiterm([-13 3 3 Z3],1,1);
%faisabilitéobs = getlmis;
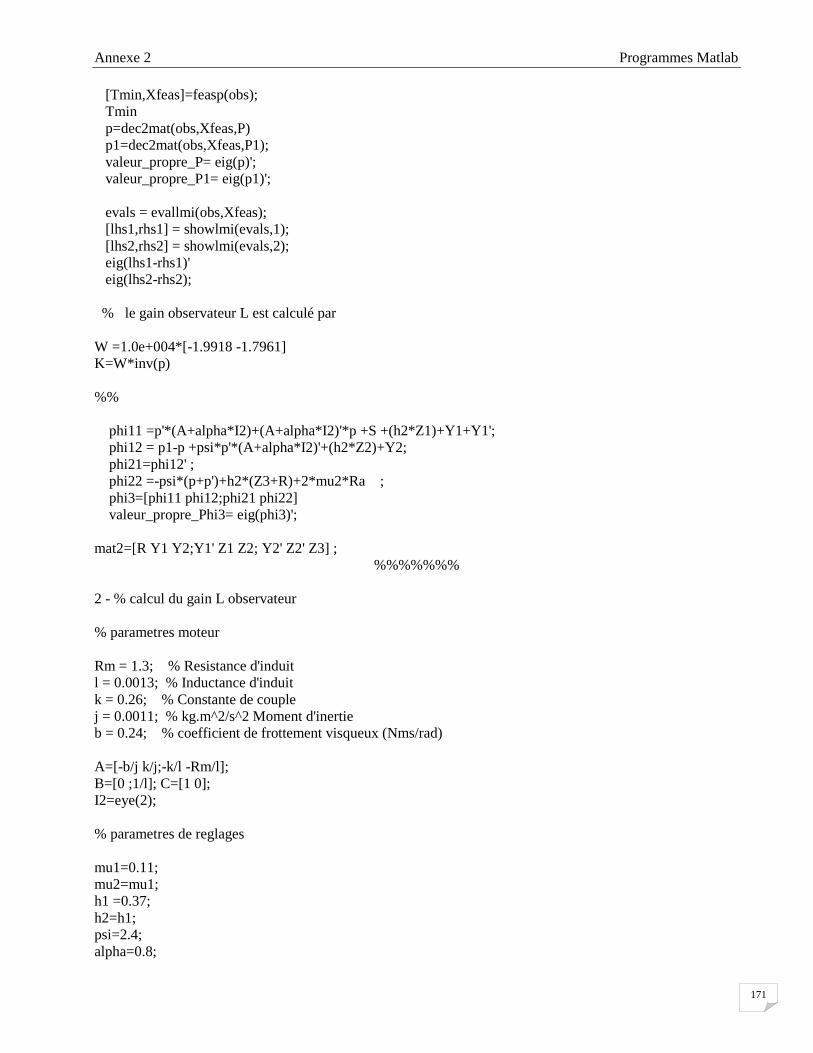
Annexe 2 Programmes Matlab
171
[Tmin,Xfeas]=feasp(obs);Tminp=dec2mat(obs,Xfeas,P)p1=dec2mat(obs,Xfeas,P1);valeur_propre_P= eig(p)';valeur_propre_P1= eig(p1)';
evals = evallmi(obs,Xfeas);[lhs1,rhs1] = showlmi(evals,1);[lhs2,rhs2] = showlmi(evals,2);eig(lhs1-rhs1)'eig(lhs2-rhs2);
% le gain observateur L est calculé par
W =1.0e+004*[-1.9918 -1.7961]K=W*inv(p)
%%
phi11 =p'*(A+alpha*I2)+(A+alpha*I2)'*p +S +(h2*Z1)+Y1+Y1';phi12 = p1-p +psi*p'*(A+alpha*I2)'+(h2*Z2)+Y2;phi21=phi12' ;phi22 =-psi*(p+p')+h2*(Z3+R)+2*mu2*Ra ;phi3=[phi11 phi12;phi21 phi22]valeur_propre_Phi3= eig(phi3)';
mat2=[R Y1 Y2;Y1' Z1 Z2; Y2' Z2' Z3] ;%%%%%%%
2 - % calcul du gain L observateur
% parametres moteur
Rm = 1.3; % Resistance d'induitl = 0.0013; % Inductance d'induitk = 0.26; % Constante de couplej = 0.0011; % kg.m^2/s^2 Moment d'inertieb = 0.24; % coefficient de frottement visqueux (Nms/rad)
A=[-b/j k/j;-k/l -Rm/l];B=[0 ;1/l]; C=[1 0];I2=eye(2);
% parametres de reglages
mu1=0.11;mu2=mu1;h1 =0.37;h2=h1;psi=2.4;alpha=0.8;
Annexe 2 Programmes Matlab
172
% beta2j (j=1,2)beta21=exp(alpha*(h2-mu2))beta22=exp(alpha*(h2+mu2))
% observablité n*n et (p*n)est n colonnes et (n*p)lines
Observ = obsv(A,C);
% Number of unobservable statesunobserv = length(A)-rank(Observ);
% initialisation LMI
setlmis([]);P1 = lmivar(1,[2 1]);P = lmivar(1,[2 1]);S = lmivar(1,[2 1]);Y1 = lmivar(1,[2 1]);Y2 = lmivar(1,[2 1]);Z1 = lmivar(1,[2 1]);Z2 = lmivar(1,[2 1]);Z3 = lmivar(1,[2 1]);R = lmivar(1,[2 1]);Ra = lmivar(1,[2 1]);
W= lmivar(2,[2 1]);phi2= lmivar(1,[2 1]);M12 = lmivar(2,[4 2]);M13 = lmivar(2,[4 2]);
%les termes LMIlmiterm([-1 1 1 P1], 1,1);lmiterm([-2 1 1 P], 1,1);lmiterm([-3 1 1 S], 1,1);lmiterm([-4 1 1 Y1], 1,1);lmiterm([-5 1 1 Y2], 1,1);lmiterm([-6 1 1 Z1], 1,1);lmiterm([-7 1 1 Z2], 1,1);lmiterm([-8 1 1 Z3], 1,1);lmiterm([-9 1 1 R], 1,1);lmiterm([-10 1 1 Ra], 1,1);
% 1iere lmilmiterm([phi2 1 1 -P],1,(A+alpha*I2),'s');lmiterm([phi2 1 1 S],1,1);lmiterm([phi2 1 1 Z1],h2,1);lmiterm([phi2 1 1 Y1],1,1);lmiterm([phi2 1 1 -Y1],1,1);
lmiterm([phi2 1 2 P1],1,1);lmiterm([phi2 1 2 P],-1,1);lmiterm([phi2 1 2 -P],psi,(A+alpha*I2)');lmiterm([phi2 1 2 Z2],h2,1);
Annexe 2 Programmes Matlab
173
lmiterm([phi2 1 2 Y2],1,1);lmiterm([phi2 2 2 P],-psi,1);lmiterm([phi2 2 2 -P],-psi,1);lmiterm([phi2 2 2 Z3],h2,1);lmiterm([phi2 2 2 R],h2,1);lmiterm([phi2 2 2 Ra],2*mu2,1);
%%%%%M12=[beta21*W*C-Y1;psi*beta21*W*C-Y2];M13=mu2*beta21*[W*C;psi*W*C];
% 1ieme LMIlmiterm([12 1 1 0],phi2);lmiterm([12 1 2 0],M12);lmiterm([12 1 3 0],M13);lmiterm([12 2 2 0],-S); % LMI #1: -Slmiterm([12 3 3 0],-mu2*Ra); % LMI #1: -mu2*Ra
% 2ieme LMIlmiterm([-13 1 1 R],1,1); % LMI #2: Rlmiterm([-13 1 2 Y1],1,1); % LMI #2: Z1lmiterm([-13 1 3 Y2],1,1);lmiterm([-13 2 2 Z1],1,1);lmiterm([-13 2 3 Z2],1,1);lmiterm([-13 3 3 Z3],1,1);
% faisabilité
obs = getlmis;[Tmin,Xfeas]=feasp(obs);Tmin
p=dec2mat(obs,Xfeas,P)p1=dec2mat(obs,Xfeas,P1);valeur_propre_P= eig(p)';valeur_propre_P1= eig(p1)';
% evaluationevals = evallmi(obs,Xfeas);[lhs1,rhs1] = showlmi(evals,1);[lhs2,rhs2] = showlmi(evals,2);Q=eig(lhs1-rhs1)eig(lhs2-rhs2);
% le gain observateur L est calculé par :
W =[-1.992;-0.496];L=inv(p')*W
phi11 =p'*(A+alpha*I2)+(A+alpha*I2)'*p +S +(h2*Z1)+Y1+Y1';phi12 = p1-p +psi*p'*(A+alpha*I2)'+(h2*Z2)+Y2;phi21=phi12' ;phi22 =-psi*(p+p')+h2*(Z3+R)+2*mu2*Ra;
Annexe 2 Programmes Matlab
174
phi2=[phi11 phi12;phi21 phi22]valeur_propre_Phi2= eig(phi2)';
mat2=[R Y1 Y2;Y1' Z1 Z2;Y2' Z2' Z3]
%%%
3 - La fonction « moteur » qui représente le système moteur DC, exécutée dans Simulink :
function [sys,x0,str,ts] = moteur(t,x,u,flag)
%paramètres moteur
Rm = 1.3; % Resistance d'induitl = 0.0013; % Inductance d'induitk = 0.26; % Constante de couplej = 0.0011; % kg.m^2/s^2 Moment d'inertieb = 0.24; % coefficient de frottement visqueux (Nms/rad)
K1= -0.2545;K2=-0.4650;b1= 0; b2= 1/l;
switch flag,case 0
[sys,x0,str,ts]=mdlInitializeSizes;
case 1sys=mdlDerivatives(t,x,u,Rm,l,k,j,b,K1,K2,b1,b2);
case 3sys=mdlOutputs(t,x,u,Rm,l,k,j,b,K1,K2,b1,b2);
case 2, 4, 9 sys = [];
otherwiseerror(['Unhandled flag = ',num2str(flag)]);
endfunction [sys,x0,str,ts]=mdlInitializeSizes
sizes = simsizes;sizes.NumContStates = 2;sizes.NumDiscStates = 0;sizes.NumOutputs = 2;sizes.NumInputs = 4;sizes.DirFeedthrough = 1;sizes.NumSampleTimes = 1;sys = simsizes(sizes);x0 = [0 0];str = [];ts = [0];
Annexe 2 Programmes Matlab
175
function sys=mdlDerivatives(t,x,u,Rm,l,k,j,b,K1,K2,b1,b2)sys = [-b/j*x(1)+k/j*x(2)+b1*(u(1)-K1*u(3));
-k/l*x(1)-Rm/l*x(2)+b2*(u(2)-K2*u(4))];
function sys=mdlOutputs(t,x,u,Rm,l,k,j,b,K1,K2,b1,b2)sys = [x(1);x(2)];
%%%%%%%%
4 - La fonction « Observateur » qui représente l’observateur, exécutée dans Simulink
function [sys,x0,str,ts] = observ(t,x,u,flag)
%paramètres moteur
Rm = 1.3; % Resistance d'induitl = 0.0013; % Inductance d'induitk = 0.26; % Constante de couplej = 0.0011; % kg.m^2/s^2 Moment d'inertieb = 0.24; % coefficient de frottement visqueux (Nms/rad)
L1 =-1.3388;L2=-0.9906K1= -0.2545;K2=-0.4650;
b1= 0; b2= 1/l;C1=1;C2=0;
switch flag,case 0
[sys,x0,str,ts]=mdlInitializeSizes;
case 1sys=mdlDerivatives(t,x,u,Rm,l,k,j,b,b1,b2,K1,K2,L1,L2,C1,C2);
case 3sys=mdlOutputs(t,x,u,Rm,l,k,j,b,b1,b2,K1,K2,L1,L2,C1,C2);
case 2, 4, 9 sys = [];
otherwiseerror(['Unhandled flag = ',num2str(flag)]);
endfunction [sys,x0,str,ts]=mdlInitializeSizes
sizes = simsizes;sizes.NumContStates = 2;sizes.NumDiscStates = 0;sizes.NumOutputs = 2;sizes.NumInputs = 6;sizes.DirFeedthrough = 1;sizes.NumSampleTimes = 1;sys = simsizes(sizes);
Annexe 2 Programmes Matlab
176
x0 = [0 0];str = [];ts = [0];
function sys=mdlDerivatives(t,x,u,Rm,l,k,j,b,b1,b2,K1,K2,L1,L2,C1,C2)
sys = [-b/j*x(1)+k/j*x(2)+b1*(u(1)-K1*u(3))-L1*C1*(u(5)-u(3));
-k/l*x(1)-Rm/l*x(2)+b2*(u(2)-K2*u(4))-L2*C2*(u(6)-u(4))];
function sys=mdlOutputs(t,x,u,Rm,l,k,j,b,b1,b2,K1,K2,L1,L2,C1,C2)sys = [x(1); x(2)];
%%%%%
5 – calcule de K et L par la technique de placement de pole:
%paramètres moteur
Rm = 1.3; % Resistance d'induitl = 0.0013; % Inductance d'induitk = 0.26; % Constante de couplej = 0.0011; % kg.m^2/s^2 Moment d'inertieb = 0.24; % coefficient de frottement visqueux (Nms/rad)
A=[-b/j k/j;-k/l -Rm/l];B=[0 ;1/l]; C=[1 0];
p = [-202 -1.23];
K=place(A,B,p)L=place(A',C',p)
Liste des figures
177
Liste des figures
Figure I.1 : Machine à vent doté d’un vantail ..……………………………………………………… 15
Figure I.2 : Système linéaire…………………………………….…………………………………… 17
Figure I.3 : Systèmes invariants…...…………………………………………………………………...17
Figure I.4 : Entrée de commande e(t) et de perturbations d(t).....…………………..………………….18
Figure I.5: Classes principales des systèmes………………..…………………………………………20
Figure I.6 : Schéma de principe d’un système de commande en Boucle ouverte (BO)..……………...21
Figure I.7 : Commande en boucle fermée......…………………………………………………………21
Figure I.8 : Stabilité des systèmes.………………………….…………………………………………22
Figure I.9 : Schéma fonctionnel d’une fonction de transfert.………………………………………….24
Figure I.10 : Système dynamique multivariable.………………………………………………………25
Figure I.11 : Trajectoire d’état dans un espace d’état.…………………………………………………26
Figure I.12 : Systèmes multivariable.………………………………………………………………….27
Figure I.13 : bloc de commande par retour d’état……………………………………………………..29
Figure I.14. Réponse impulsionelle de deux systèmes asymptotiquement stables…………………….35
Figure I.15 : système à retard..………………………………………………………………………...42
Figure I .16 : Influence du retard sur réponse impulsionelle retard pur...……………………………..43
Figure I .17 : Retard produit sur la réponse impulsionelle système 2ième ordre……………………….43
Figure I.18 : retard pur sur la réponse indicielle……………………………………………………….43
Figure I.19 : Retard pur sur la réponse indicielle système 2ième ordre ………………………………...44
Figure II.1 : Structure d’observateur…………………………….…………...………………………..51
Figure II.2 : Structure de l’observateur d’état………………….…….………………………………..52
Figure II.3 : Structure de commande à retour d’état observé….………….…………………………...54
Figure II.4 : La synthèse d'un système commandé par retour d'état reconstruit par un observateur…..60
Figure III.1 : Localisation des retards………………………………………………………………….78
Figure III.2 : Commande à distance des systèmes à retards…………………………………………...79
Figure IV.1: Observation par injection de sortie………………………………………………………95
Figure V.1 : Système commandé en réseau ………………………………………………………….110
Figure. V.2 : Exemple de flux d’un réseau comportant un routeur ………………………………….113
Figure. V.3 : Modélisation de la boucle de transmission ……………………………………………117
Figure. V.4. Signal échantillonné bloqué (période constante) ……………………………………….119
Figure. V.5 Echantillonnage périodique et avec retard : ( KTtt −= ) ……………………………119
Figure. V.6 Structure de la commande maitre-esclave par réseau …………………………………..121
Liste des figures
178
Figure. V.7 échantillonnage non périodique …………………………………………………………122
Figure. V.8 Traitement de la commande …………………………………………………………….124
Figure V.9: Librairie standard de Simulink ………………………………………………………….141
Figure V.10: Schéma technologique d’un entrainement Moteur électrique –DC-. ………………….141
Figure V.11 : le schéma fonctionnel du model proposé ……………………………………………..143
Figure V.12 : schéma de simulation avec fonction de Transfer ……………………………………..144
Figure V.13. : Réglage de paramètres de simulation ………………………………………………...144
Figure V.14 la vitesse )(1 tx = ………………………………………………………………...145
Figure V.15 le courant )(1 tix a= .……………………………………………………………….145
Figure V.11 : model de simulation du système sans retard sur Simulink ……………………………150
(Matlab Version 7.6 R2008a)
Figure V.12 échelon Ua(t) …………………………………………………………………………...150
Figure 5.13 Les deux sorties réels du moteur : X1(t) et X2(t)………………………………………..151
Figure 5.14 Les deux sorties estimées X1(t) et X2(t)………………………………………………...151
Figure 5.15. La convergence de l’état estimé X1(t) vers l’état réel X1(t) …………………………...152
Figure 5.16. La convergence de l’état estimé X2(t) vers l’état réel X2(t) …………………………...152
Figure 5.17 : L’erreur de convergence e1(t) : X1(t) réel - X1(t) estimé ……………………………..153
Figure 5.18 : L’erreur de convergence e2(t) : X2(t) réel – X2(t) estimé …………………………….153
Figure 5.19. La sortie estimée Y(t) …………………………………………………………………..154
Figure 5.20. La sortie réel Y(t) ………………………………………………………………………154
Figure 5.21 Simulation du système avec retard introduit dans la commande observée…………….155
Figure 5.22 : x1(t) réel et x1(t) estimée ……………………………………………………………...156
Figure 5.23. x2(t) réel et x2(t) estimée……………………………………………………………….156
Figure 5.25 : l’erreur )(ˆ)()( 111 txtxte −= .………………………………………………………….157
Figure 5.26 : l’erreur )(ˆ)()( 222 txtxte −= …………………………………………………….........157
Figure 5.27 : la sortie estimé placement de pole……………………..………………………………158
Figure 5.28 : sortie réelles……………………………………………………………………………159
Figure 5.29 : les erreurs )(ˆ)()( 111 txtxte −= et )(ˆ)()( 222 txtxte −= …………………...............159
Figure 5.29 : les états réels et éstimés de X1 …………………………………………………………………………………………...160
Figure 5.29 : les états réels et éstimés de X2 …………………………………………………………………………………………...160
Bibliographie
179
Références bibliographiques
[1] : D.Arzelier « LAAS-CNRS » : Représentation et analyse des systèmes linéaires « Notes
de cours ».
[2] : William L. Brogan 2000.
[3] : BASES DE L’AUTOMATIQUE « Commande Linéaire des Systèmes Dynamiques »
Par :Denis MATIGNON ENST (Septembre 98).
[5] : Poly X corrections (Frédéric Bonnans et Pierre Rouchon Septembre 2003).
[6] : J.Baillou, J.P.Chemla, B. Gasnier, M.Lethiecq : Cours de Systèmes Asservis
(Polytech Tours).
[7] : Principe de la commande automatique.
[8] : Proff :Benoît Bergeon : Commande linéaire des systèmes multivariable .
[9] : ( W.L. Brogan, Théorie de commande moderne 1991)
[10] : Commande Linéaire des Systèmes Dynamiques( Denis MATIGNON ENST
Département Traitement du Signal et des Images) 3 Septembre 1998.
[11]: ANALYSE ET COMMANDE DE SYSTEMES DYNAMIQUES Frédéric
Bonnans Pierre Rouchon (2003).
[13] : Structures des systèmes et problèmes de commande
[14]: Un article de Wikipédia, l'encyclopédie libre.
[15] : R. E. KALMAN A New Approach to Linear Filtering and Prediction Problems
Transactions of the ASME–Journal of Basic Engineering, 1960 by ASME
[16]: Observing the state of a lineair sytem (David G.LUENBERGER)
[17]: Estimation de l’état et des entrées inconnues pour une classe de
systèmes non lineaires (THESE octobre 2006) Dr Estelle Cherrier.
[19] : A COMPARATIVE STUDY OF NONLINEAR OBSERVERS AND
CONTROL DESIGN STRATEGIES WEIWEN WANG GUANGXI UNIVERSITY, P.R.
CHINA JULY 1994.
Bibliographie
180
[20] : Slotine • Li APPLIED NONLINEAR CONTROL (1991).
[21] : J. L´evine : Analyse et Commande des Systèmes Non Linéaires -Mars 2004-
[22] : Philippe Mullhaupt : Introduction `a l’Analyse et `a la Commande des Systèmes
Non Linéaires (2 mai 2006).
[23] : Wilson J. Rugh : Nonlinear System Theory - 2002 -.
[24] : Thèse « Olivier pages » étude et comparaison de différentes structures de commande
multi contrôleurs application à un axe robotisé 2001
[25]: A. Isidori. Nonlinear Control Systems. Second Edition, springer Verlag
Berlin, Heidelberg, 1989.
[27] : Jean-Jacques Slotine and Weiping Li. “Applied non linear control”. Prentice
Hall, Englewood Cliffs, New Jersey, January 1991.
[28] : Sur l’observation d’état des systèmes dynamiques non linéaires’ par Dr. Ali
Zemouche, Soutenue publiquement (Mars 2006).
[29] : Dr : Alexandre Seuret : Commande et observation des systèmes à retards
variables : theorie et applications .
[30] : « Stabilisation des systèmes commandes par réseaux » Emmanuel WITRANT le 27
Septembre 2005.
[31] : [Krasovskii 63] N.N. Krasovskii. Stability of motion. Stanford University Press,
Stanford CA, USA (translation by J. Brenner), 1963.
[32] : William L. Brogan 2000
[33] :Introduction à la théorie de La commande adaptative des systèmes linéaires Laurent
PRALY Mars 1997
[34] : Poly X corrections ( Frédéric Bonnans et Pierre Rouchon Septembre (2003).
[36] : Cours de Systèmes Asservis (J.Baillou, J.P.Chemla, B. Gasnier, M.Lethiecq)[Polytech
Tours]
[37] :Principe de la commande automatique.
[38] : Commande linéaire des systèmes multivariables ( Proff :Benoît Bergeon).
[39] : ( W.L. Brogan, Théorie de commande moderne 1991)
[44] : THESE (« Automatique » « Commande et observation des systèmes à retards variables
: théorie et applications (octobre 2006) Dr A. Seuret.
Bibliographie
181
[45] : Lmi control toolbox For Use with MATLAB (Pascal Gahinet, Arkadi Nemirovski,Alan
J. laub ,Mahmoud Chilali)
[46] : Conception d’observateurs non linéaires par approche multi-modèle : (Abdelkader
AKHENAK -2004).
[47] : Robust exponential stabilization for systems with time-varying delays A. Seuret.
[49] : Introduction au logiciel MATLAB « Michel ETIQUE, mars 2002, Yverdon-les- Bains
version 1.2 ».
[50] : Observation par : Frédéric Rotella ( Ecole Nationale d’Ingénieurs de Tarbes).
[51] : Laurent PRALY : Introduction à la théorie de La commande adaptative des systèmes
« linéaires Mars 1997 ».
[52] D.G. Luenberger. An introduction to observers. IEEE Transactions on
Automatic Control, vol. 16, no. 6, pages 596–602, 1971.
Résumé
Ce mémoire, est fondé sur l'analyse des problèmes apparaissant dans la
commande à distance à travers le réseau de communication « internet » entre
différents agents maître et esclave. Les difficultés sont représentées par l'existence
des retards introduits par la transmission des lois de commande dans le réseau et
l’échantillonnage des informations circulants entre le maitre et l’esclave.
Le réseau de communication génère des perturbations sur le système à
commander en formes de retard, de pertes de données… qui doivent être prises en
compte dans la conception de lois de commande. En général lorsque la taille des
retards devient significative il n'est plus possible de les ignorer.
L’analyse et la synthèse de lois de commande par retour d’état observé est
effectué avec le calcule de gain de la commande K et de l’observateur L par les
techniques de résolutions LMI (Linear Matrix Inequality) à fin de stabiliser
exponentiellement avec un degré de convergence α le système a commandé.
La simulation est réalisé avec dans le logiciel Matlab « Simulink » où
l’esclave est représenté par un moteur électrique « DC » qui est supposé comme
système linéaire.
Mots clés :
Commande en réseau; LMI; Systèmes à retards; Observateurs linéaires; Commande
observé; Stabilité exponentielle; Stabilté Lyapounov; α-stabilité; Obsevateurs non
linéaire; Réseau industrielle .