Embed Size (px)
Citation preview
Ecole Nationale Supérieure de Physique de Strasbourg2èmeannée
Commande Numérique des Systèmes2èmepartie
Jacques GANGLOFFJacques GANGLOFFEt
Michel de MATHELIN
Programme de la deuxième partie (1)
• Synthèse des correcteurs numériques– Objectifs (rappels)– Objectifs (rappels)– Transposition à partir du continu (rappels et compléments)– Placement des pôles dominants– Prédicteur de Smith– Commande avec modèle interne– Synthèse algébrique : correcteurs RST– Analyse de la robustesse et des performances– Analyse de la robustesse et des performances
Programme de la deuxième partie (2)
• Représentations d’état– Représentation d’état des systèmes échantillonnés– Obtention des équations d’état et fonctions de transfert– Résolution des équations d’état– Stabilité– Commandabilité, observabilité et minimalité– Formes canoniques– Placement des pôles par retour d’état
• Aspects pratiques• Aspects pratiques– Définition du cahier des charges– Choix de la période d’échantillonnage– Prise en compte des saturations– Prise en compte de la quantification– Conditionnement numérique du correcteur
• E. Godoy et E. Ostertag, Commande numérique des systèmes.
Ellipses, Collection Technosup, Paris, 2003.
Bibliographie – ouvrages en français
Ellipses, Collection Technosup, Paris, 2003.
• R. Longchamp, Commande numérique de systèmes dynamiques.
Presses Polytechniques et Universitaires Romandes, Lausanne, 1995.
• E. Ostertag, Systèmes et asservissements continus.
Ellipses, Collection Technosup, Paris, 2004.
• M. Rivoire et J.-L. Ferrier,Commande par calculateur et identification.
Eyrolles, Paris, 1997.Eyrolles, Paris, 1997.
• K. Aström and B. Wittenmark,Computer controlled systems : theory and design.Prentice Hall, Englewood Cliffs, 1984, 1990.
Bibliographie – ouvrages en anglais
Prentice Hall, Englewood Cliffs, 1984, 1990.• G. Franklin, J. Powell, and A. Emami-Naeini, Feedback control of dynamic
systems.Addison Wesley, Wokingham, 1988.
• G. Franklin, J. Powell, and L. Workman, Digital control of dynamic systems.Addison Wesley, Wokingham, 1989.
• T. Kailath,Linear Systems.Prentice Hall, Englewood Cliffs, 1980.Prentice Hall, Englewood Cliffs, 1980.
• B. Kuo, Automatic control systems.Prentice Hall, Englewood Cliffs, 1991.
• B. Kuo, Digital control systems.Harcourt Brace & Jovanovich, Orlando, 1992.
• K. Ogata, Modern control engineering.Prentice Hall, Englewood Cliffs, 1990.
1 Objectifs – rappels (1)
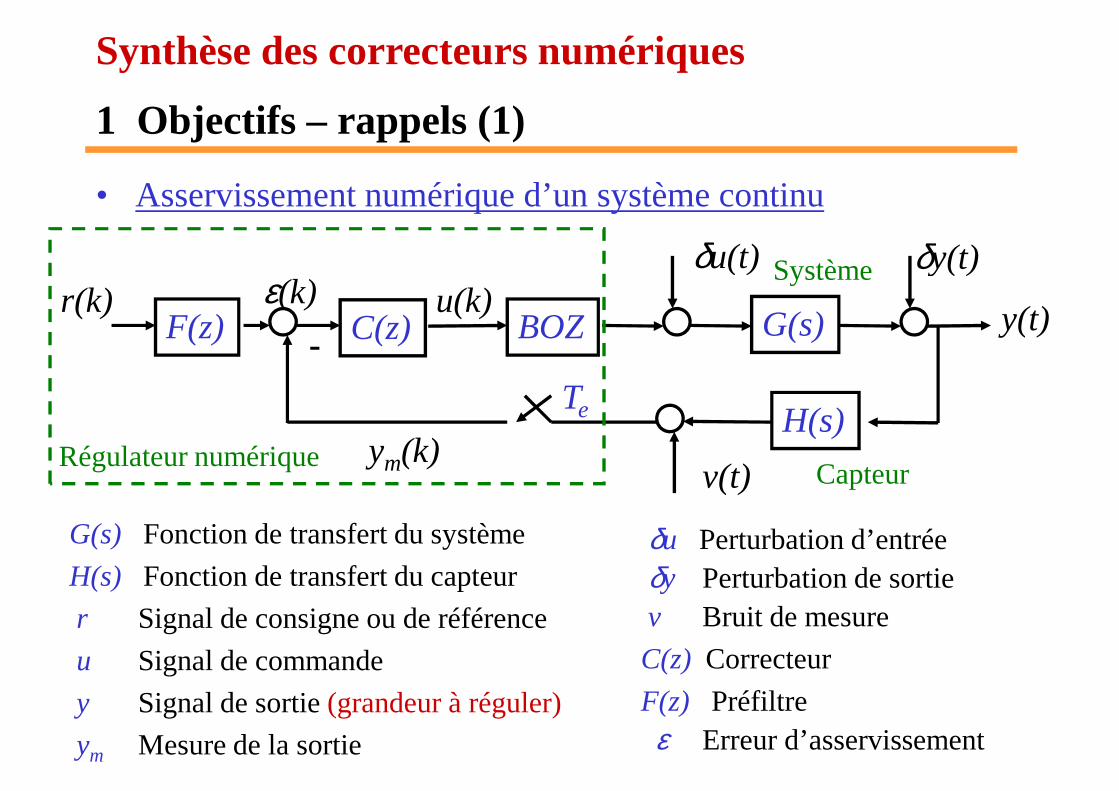
• Asservissement numérique d’un système continu
Synthèse des correcteurs numériques
δu(t) δy(t)Système
C(z) G(s)r(k)
v(t)
u(k) y(t)
ym(k)
δu(t) δy(t)ε(k)
- BOZ
H(s)Te
G(s) Fonction de transfert du système
F(z)
δu Perturbation d’entrée
Régulateur numériqueCapteur
Système
G(s) Fonction de transfert du système
H(s) Fonction de transfert du capteur
r Signal de consigne ou de référence
u Signal de commande
y Signal de sortie (grandeur à réguler)
ym Mesure de la sortie
δu Perturbation d’entréeδy Perturbation de sortiev Bruit de mesure
C(z) Correcteur
F(z) Préfiltreε Erreur d’asservissement
1 Objectifs – rappels (2)
• Objectifs de la synthèse:Stabilité:
Synthèse des correcteurs numériques
Stabilité: – Le système en boucle fermée est stable
Performance:
– Suivre les variations de la consigne– Comportement en boucle fermée conforme à un
modèle – Rejeter les perturbations et le bruit– Rejeter les perturbations et le bruit
Robustesse:
– Conservation de la stabilité et des performances malgré les incertitudes sur le modèle (dynamiques non modélisées, non linéarités, incertitudes paramétriques, …)
1 Objectifs – rappels (3)
• Outils pour la synthèse:Stabilité:
Synthèse des correcteurs numériques
Stabilité: – Critère de Jury– Critère de Nyquist
Performance: – Lieu d’Evans (placement des pôles de la boucle
fermée) – Calcul des erreurs en régime permanent– Calcul des erreurs en régime permanent– Simulation (vérification a posteriori)
Robustesse:– Marges de stabilité (diagramme de Nyquist)– Simulation (vérification a posteriori)
1 Objectifs – rappels (4)
• Méthodes simples pour la synthèse (monovariable):– Transposition de correcteurs continus– Utilisation de PID
Synthèse des correcteurs numériques
– Utilisation de PID– Autoréglage– Placement de pôles (lieu d’Evans, retour d’état)– Modèle interne– Méthodes algébriques (RST)
• Méthodes avancées pour la synthèse (multivariable):– Commande optimale : minimalisation d’un critère quadratique sur
l’erreur d’asservissement et la commande– Commande robuste : prise en compte optimale de bornes sur les
incertitudes pour la stabilité et la performance – Commande non linéaire : prise en compte de modèles non linéaires du
système à asservir
2 Transposition à partir du continu (1)
• Principe:
1. Synthèse d’un correcteur continu
Synthèse des correcteurs numériques
1. Synthèse d’un correcteur continu
2. Le correcteur numérique est obtenu par approximation de la fonction de transfert du correcteur continu à l’aide d’équations aux différences. La façon la plus courante est de procéder à une transformation bilinéaire (Tustintransformation) par le changement de variable :
12 −z
1
12
+−→
z
z
Ts
e
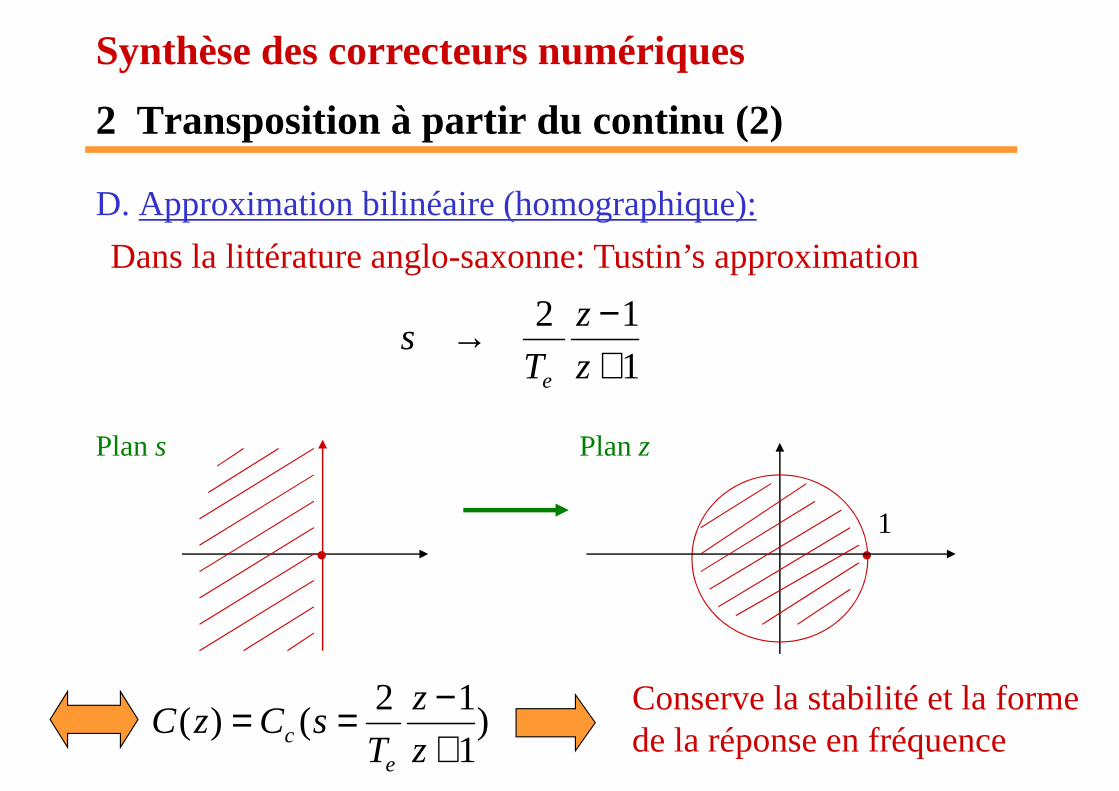
2 Transposition à partir du continu (2)
D. Approximation bilinéaire (homographique):
Synthèse des correcteurs numériques
Dans la littérature anglo-saxonne: Tustin’s approximationDans la littérature anglo-saxonne: Tustin’s approximation
1
12
+−→
z
z
Ts
e
Plans Planz
1
Conserve la stabilité et la forme de la réponse en fréquence
••1
)1
12()(
+−==
z
z
TsCzC
ec
2 Transposition à partir du continu (3)
• Conclusions:
1. La méthode s’appuie sur les résultats d’une synthèse de
Synthèse des correcteurs numériques
1. La méthode s’appuie sur les résultats d’une synthèse de correcteur analogique sur la base du modèle du système qui est également continu.
2. La synthèse ne prend pas en compte le bloqueur et le déphasage introduit par celui-ci dans la boucle d’asservissement.
3. Les performances du correcteur numériques seront au 3. Les performances du correcteur numériques seront au mieux celles du correcteur analogique.
4. Les performances du correcteur numérique se rapprocheront d’autant plus de celles du correcteur analogique que la période d’échantillonnage est petite.
3 Prise en compte du bloqueur (1)
• Principe:
1. La transmittance échantillonnée du système ouvert avec
Synthèse des correcteurs numériques
1. La transmittance échantillonnée du système ouvert avec le bloqueur est calculée (fonction de transfert en z ).
2. Une transformation bilinéaire (transformation en w ) est appliquée à cette transmittance échantillonnée pour obtenir une fonction transfert continue du système ouvert avec bloqueur.
3. Une synthèse de correcteur analogique est réalisée sur 3. Une synthèse de correcteur analogique est réalisée sur cette fonction de transfert continue.
4. Une transformation bilinéaire est appliquée au correcteur analogique synthétisé pour obtenir le correcteur numérique.
3 Prise en compte du bloqueur (2)
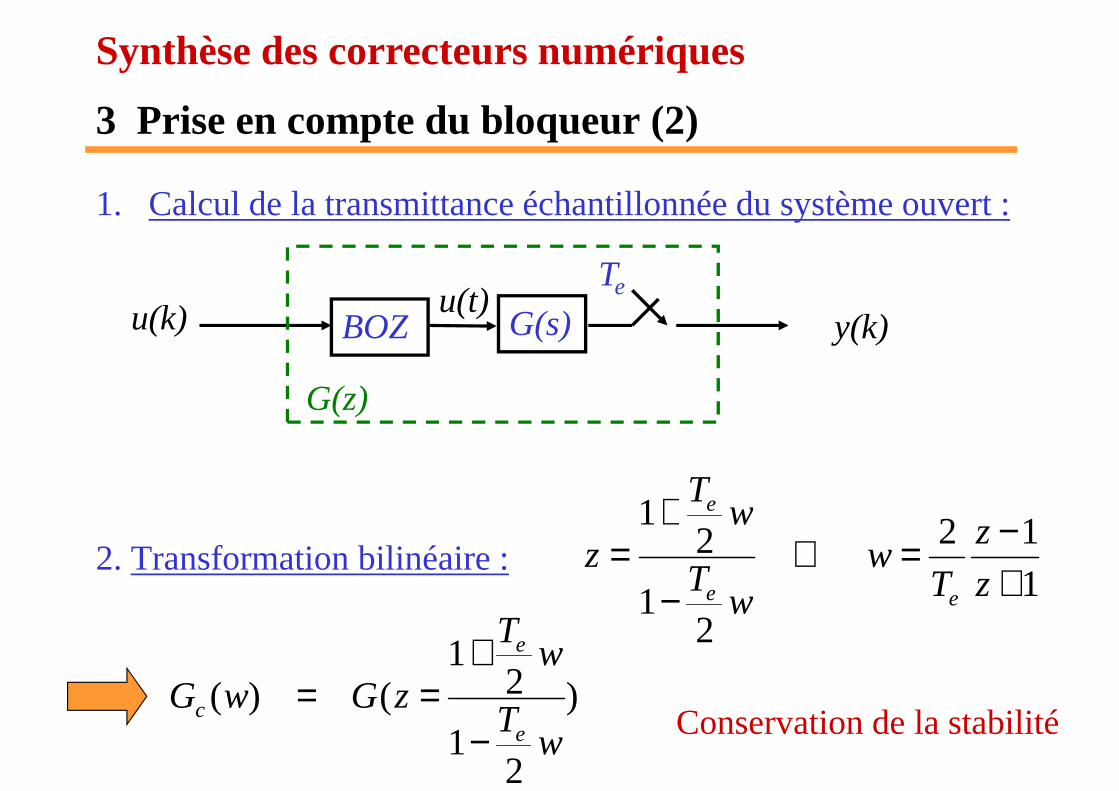
1. Calcul de la transmittance échantillonnée du système ouvert :
Synthèse des correcteurs numériques
T
G(s)u(t)
BOZ
Te
G(z)
u(k) y(k)
1221 −+ zw
Te
2. Transformation bilinéaire :1
12
21
21
+−=⇔
−
+=
z
z
Tw
wT
wz
ee
)
21
21
()(w
T
wT
zGwGe
e
c
−
+==
Conservation de la stabilité
3 Prise en compte du bloqueur (3)
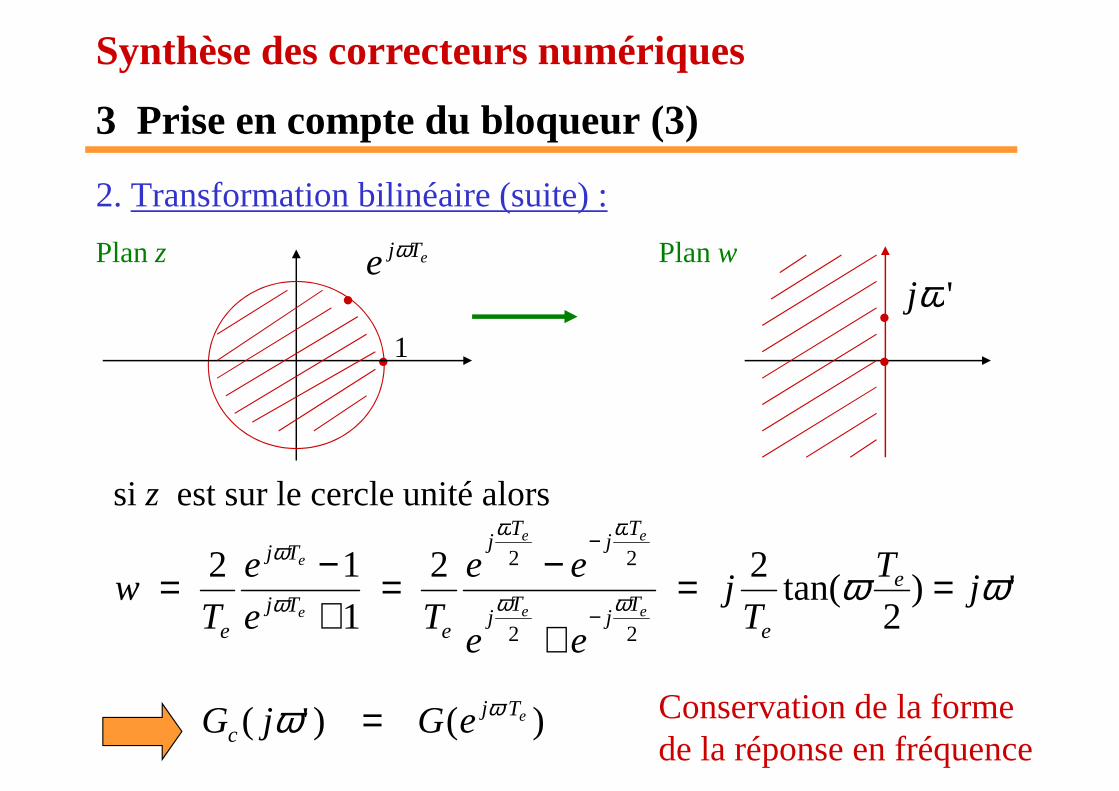
2. Transformation bilinéaire (suite) :
Synthèse des correcteurs numériques
PlanwPlanz eTje ω
ωω TT ee −
•
PlanwPlanz
•1
si z est sur le cercle unité alors
••
ee'ωj
')2
tan(22
1
12
22
22
ωωωω
ωω
ω
ω
jT
Tj
ee
ee
Te
e
Tw e
eT
jT
j
Tj
Tj
eTj
Tj
eee
ee
e
e
==+
−=+−=
−
−
Conservation de la forme de la réponse en fréquence
)()'( eTjc eGjG ωω =
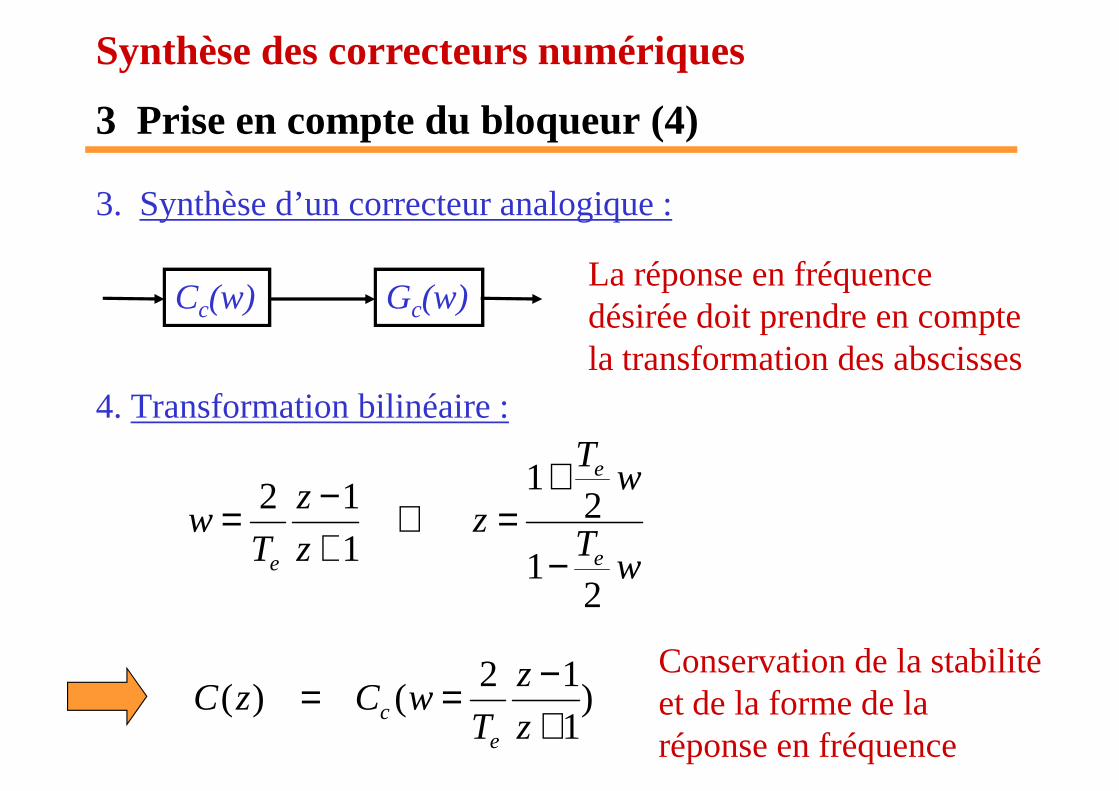
3 Prise en compte du bloqueur (4)
3. Synthèse d’un correcteur analogique :
Synthèse des correcteurs numériques
La réponse en fréquence
4. Transformation bilinéaire :
T
wT
zz
w
e
2112 +
=⇔+−=
Cc(w) Gc(w)La réponse en fréquence désirée doit prendre en compte la transformation des abscisses
wT
zzT
wee
211 −
=⇔+
=
)1
12()(
+−==
z
z
TwCzC
ec
Conservation de la stabilité et de la forme de la réponse en fréquence
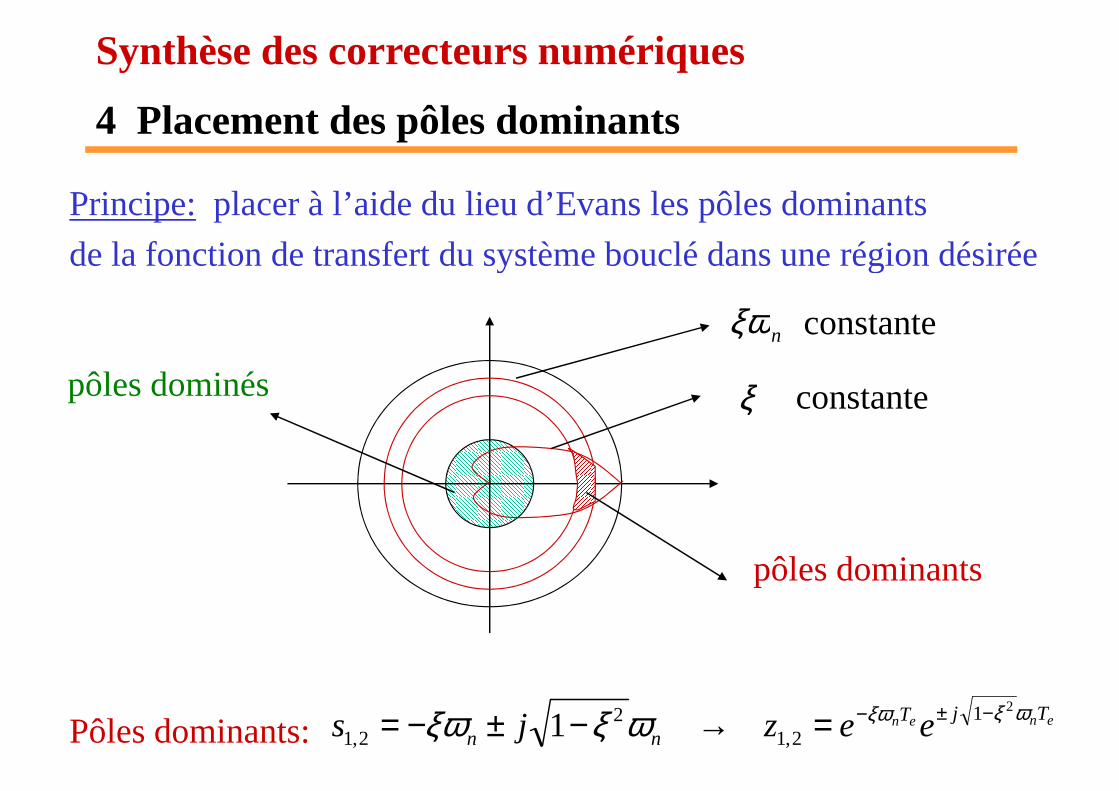
4 Placement des pôles dominants
Principe: placer à l’aide du lieu d’Evans les pôles dominants
de la fonction de transfert du système bouclé dans une région désirée
Synthèse des correcteurs numériques
de la fonction de transfert du système bouclé dans une région désirée
pôles dominés
constantenξω
constanteξ
enen TjTnn eezjs ωξξωωξξω
212,1
22,1 1 −±−=→−±−=Pôles dominants:
pôles dominants
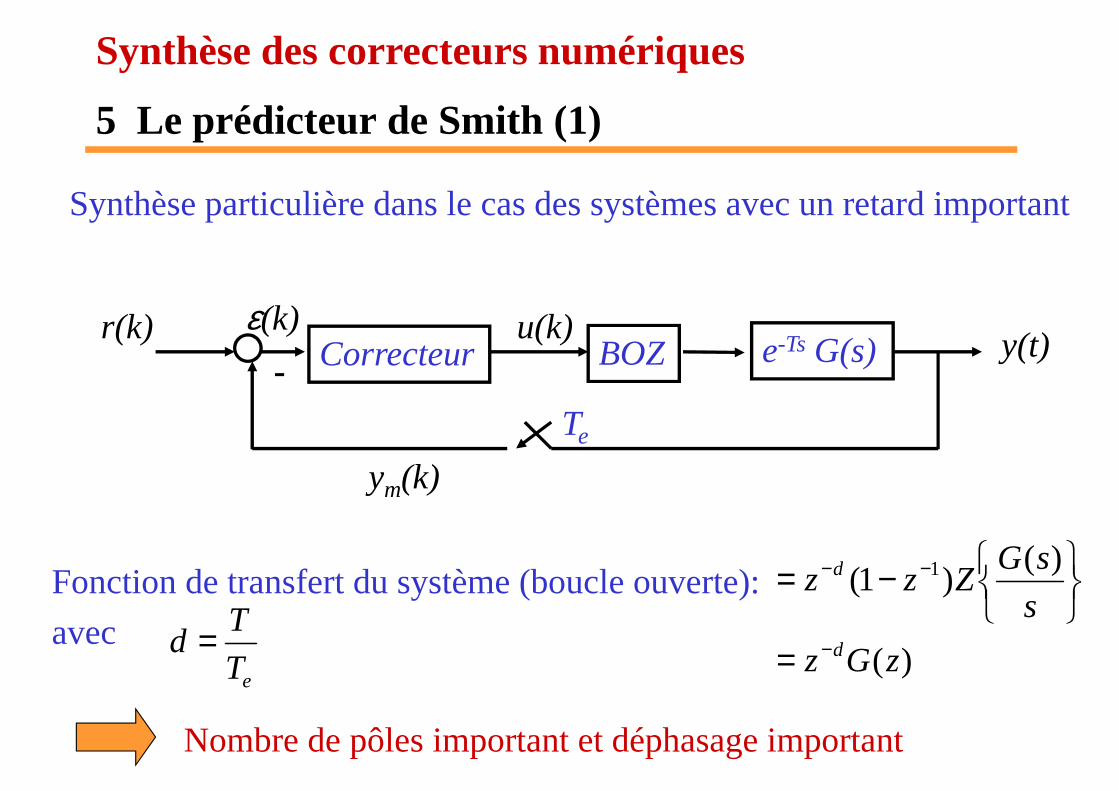
5 Le prédicteur de Smith (1)
Synthèse particulière dans le cas des systèmes avec un retard important
Synthèse des correcteurs numériques
Correcteur e-Ts G(s)r(k) u(k) y(t)
ym(k)
ε(k)
- BOZ
Te
)(
)()1( 1
zGz
s
sGZzz
d
d
−
−−
=
−=
Nombre de pôles important et déphasage important
Fonction de transfert du système (boucle ouverte):
avec eT
Td =
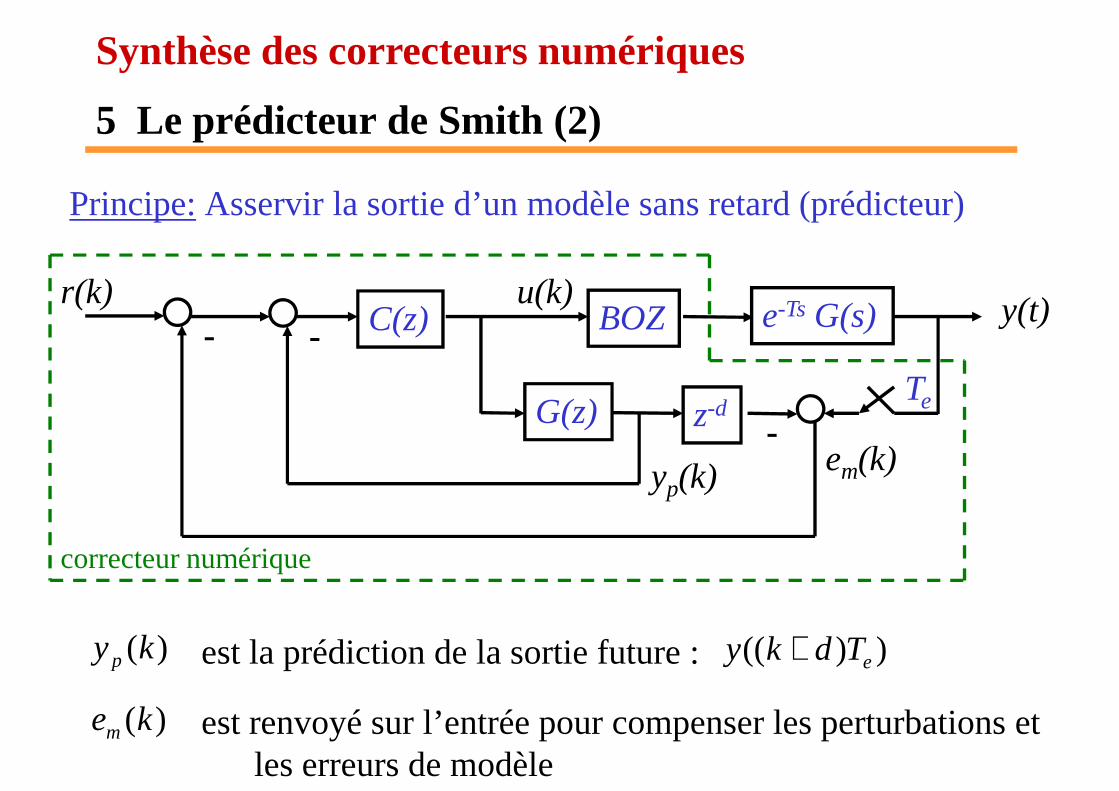
5 Le prédicteur de Smith (2)
Principe:Asservir la sortie d’un modèle sans retard (prédicteur)
Synthèse des correcteurs numériques
C(z) e-Ts G(s)r(k) u(k) y(t)
em(k)
- BOZ
Te
-
G(z) z-d-
yp(k)
)(kyp est la prédiction de la sortie future : ))(( eTdky +
correcteur numérique
)(kem est renvoyé sur l’entrée pour compenser les perturbations et les erreurs de modèle
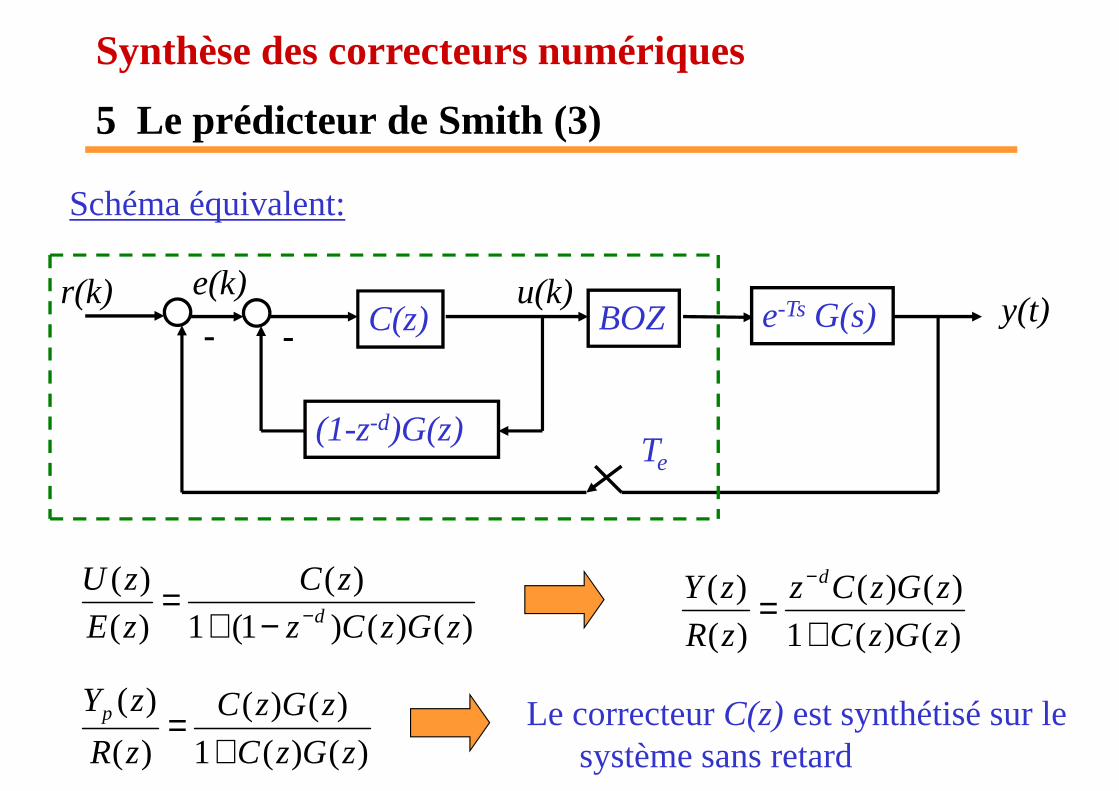
5 Le prédicteur de Smith (3)
Schéma équivalent:
Synthèse des correcteurs numériques
e(k)C(z) e-Ts G(s)
r(k) u(k) y(t)- BOZ-
(1-z-d)G(z)Te
e(k)
)()()1(1
)(
)(
)(
zGzCz
zC
zE
zUd−−+
=
Le correcteur C(z)est synthétisé sur le système sans retard
)()(1
)()(
)(
)(
zGzC
zGzCz
zR
zY d
+=
−
)()(1
)()(
)(
)(
zGzC
zGzC
zR
zYp
+=
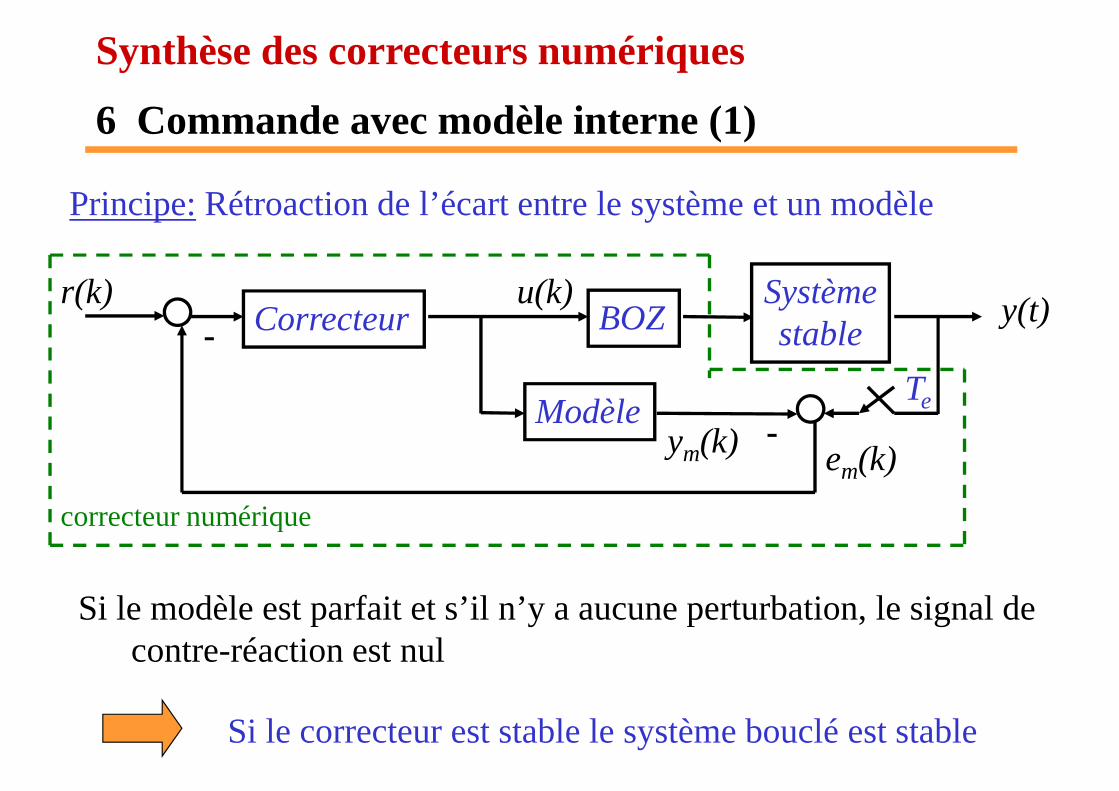
6 Commande avec modèle interne (1)
Principe:Rétroaction de l’écart entre le système et un modèle
Synthèse des correcteurs numériques
CorrecteurSystèmestable
r(k) u(k) y(t)
em(k)
BOZ
Te
-
Modèle-
correcteur numérique
ym(k)
Si le modèle est parfait et s’il n’y a aucune perturbation, le signal de contre-réaction est nul
correcteur numérique
Si le correcteur est stable le système bouclé est stable
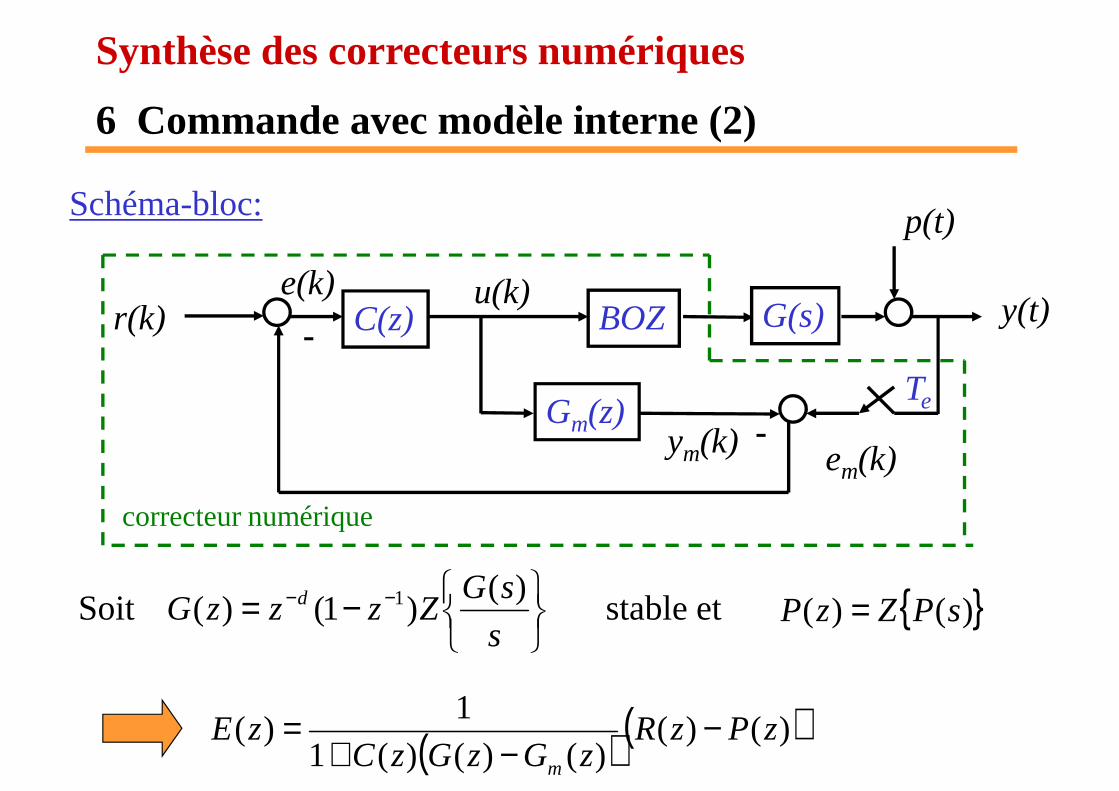
6 Commande avec modèle interne (2)
Schéma-bloc:
Synthèse des correcteurs numériques
p(t)
e(k)C(z) G(s)r(k)
u(k) y(t)
em(k)
BOZ
Te
-
Gm(z)-
correcteur numérique
ym(k)
e(k)
Soit stable et
correcteur numérique
−= −−
s
sGZzzzG d )(
)1()( 1 { })()( sPZzP =
( ) ( ))()()()()(1
1)( zPzR
zGzGzCzE
m
−−+
=
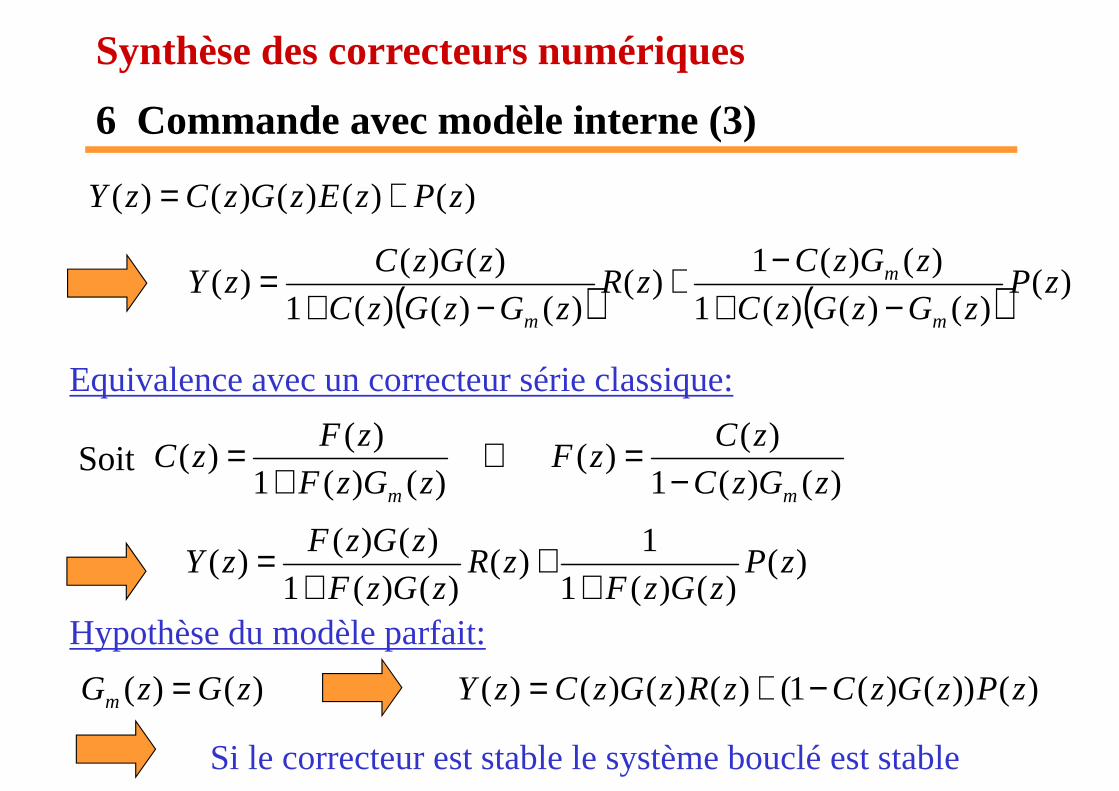
6 Commande avec modèle interne (3)
Synthèse des correcteurs numériques
)()()(1
)()()(
)( zPzGzC
zRzGzC
zY m−+=
)()()()()( zPzEzGzCzY +=
)()(1
)()(
)()(1
)()(
zGzC
zCzF
zGzF
zFzC
mm −=⇔
+=
( ) ( ) )()()()(1
)()(1)(
)()()(1
)()()( zP
zGzGzC
zGzCzR
zGzGzC
zGzCzY
m
m
m −+−+
−+=
Equivalence avec un correcteur série classique:
1)()( zGzF
Soit
Hypothèse du modèle parfait:
)()()(1
1)(
)()(1
)()()( zP
zGzFzR
zGzF
zGzFzY
++
+=
)()( zGzGm = )())()(1()()()()( zPzGzCzRzGzCzY −+=
Si le correcteur est stable le système bouclé est stable
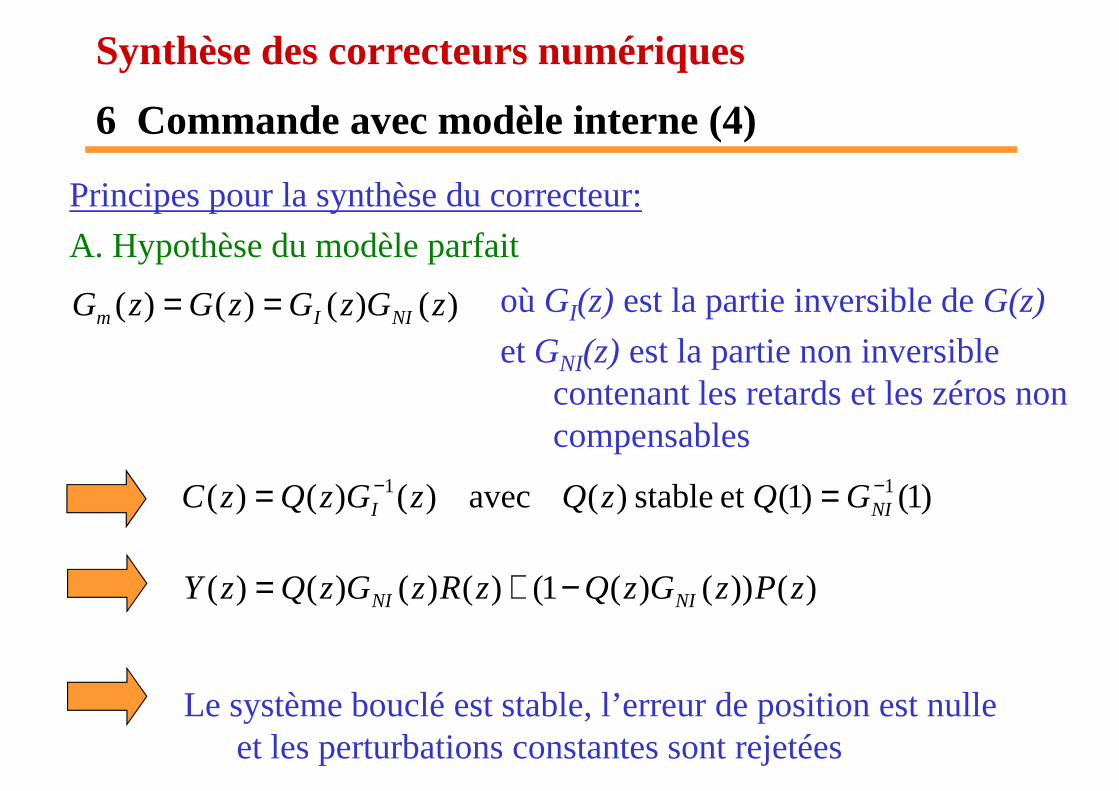
6 Commande avec modèle interne (4)
Synthèse des correcteurs numériques
Principes pour la synthèse du correcteur:
A. Hypothèse du modèle parfait
)1()1(et stable)(avec)()()( 11 −− == NII GQzQzGzQzC
A. Hypothèse du modèle parfait
où GI(z) est la partie inversible de G(z)
et GNI(z) est la partie non inversible contenant les retards et les zéros non compensables
)()()()( zGzGzGzG NIIm ==
)())()(1()()()()( zPzGzQzRzGzQzY NINI −+=
Le système bouclé est stable, l’erreur de position est nulle et les perturbations constantes sont rejetées
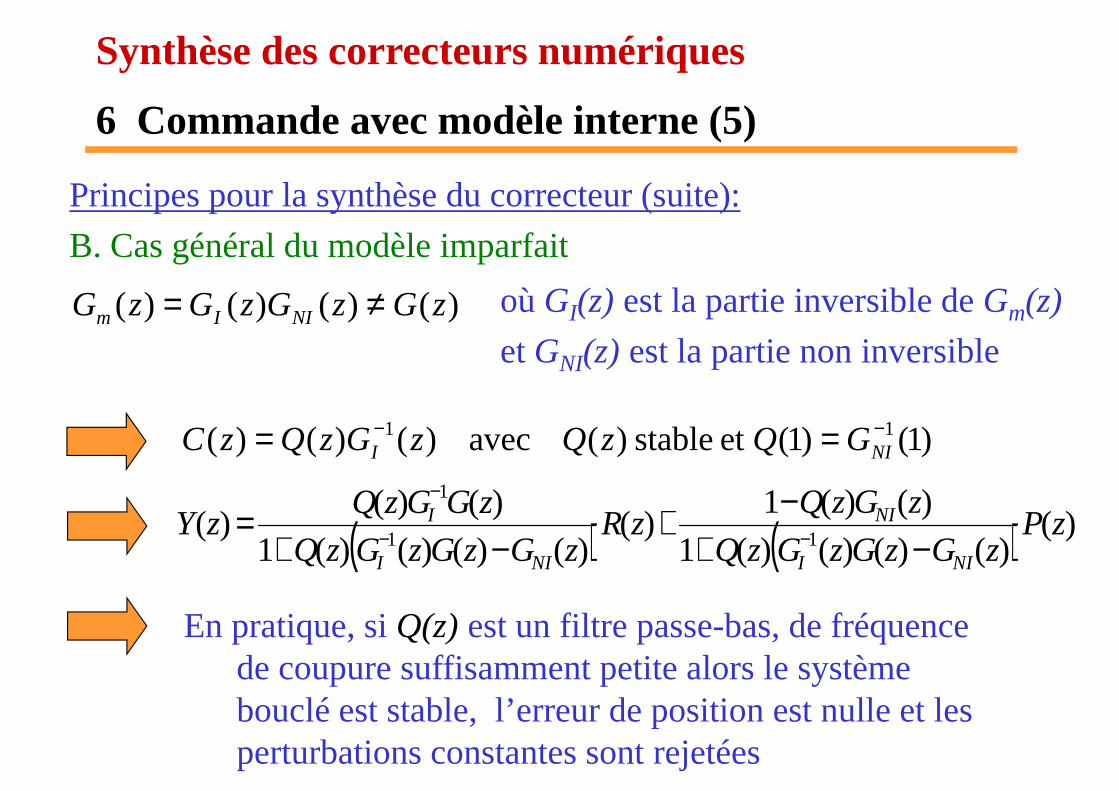
6 Commande avec modèle interne (5)
Synthèse des correcteurs numériques
Principes pour la synthèse du correcteur (suite):
B. Cas général du modèle imparfait
)1()1(et stable)(avec)()()( 11 −− == NII GQzQzGzQzC
B. Cas général du modèle imparfait
où GI(z) est la partie inversible de Gm(z)
et GNI(z) est la partie non inversible)()()()( zGzGzGzG NIIm ≠=
( ) ( ) )()()(1
)()()(
)(1
zPzGzQ
zRzGGzQ
zY NII
−+−+
−+= −−
−
( ) ( ) )()()()()(1
)()()()()(1
)(11
zPzGzGzGzQ
zRzGzGzGzQ
zYNIINII −+
+−+
= −−
En pratique, si Q(z)est un filtre passe-bas, de fréquence de coupure suffisamment petite alors le système bouclé est stable, l’erreur de position est nulle et les perturbations constantes sont rejetées
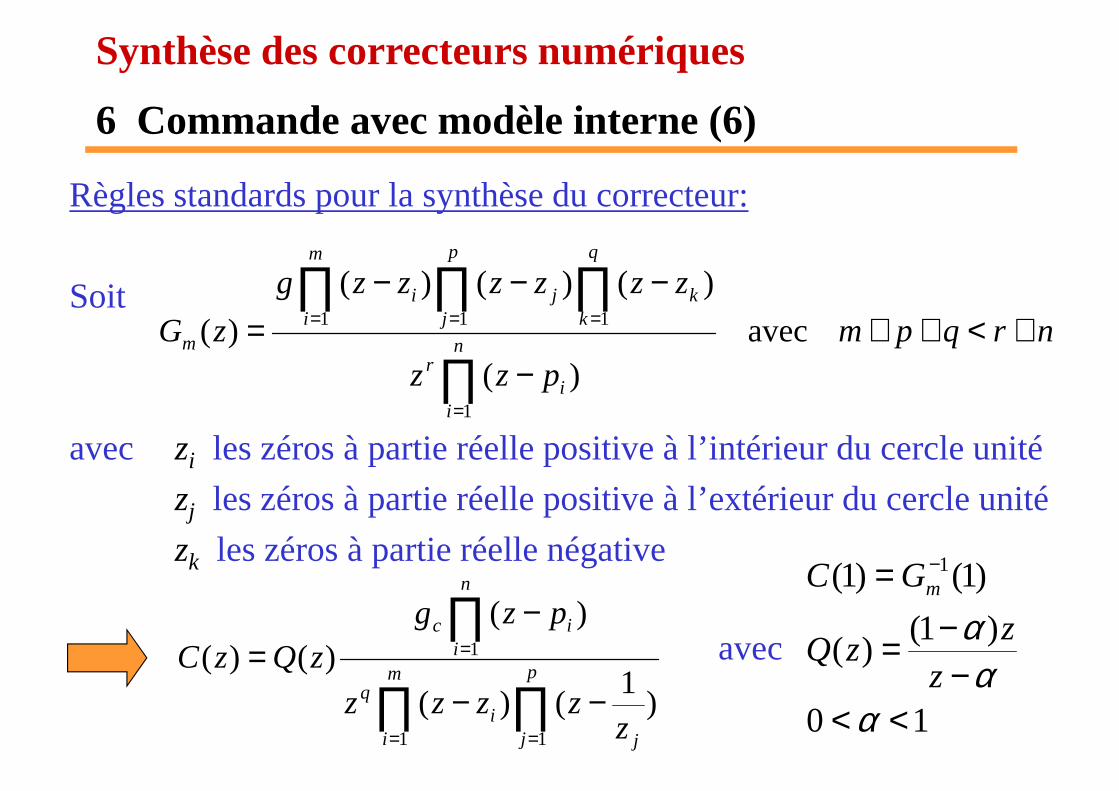
6 Commande avec modèle interne (6)
Synthèse des correcteurs numériques
Règles standards pour la synthèse du correcteur:
qpm
−−− ∏∏∏Soit
avec zi les zéros à partie réelle positive à l’intérieur du cercle unité
zj les zéros à partie réelle positive à l’extérieur du cercle unité
nrqpmpzz
zzzzzzg
zG n
ii
r
kk
jj
m
ii
m +<++−
−−−=
∏
∏∏∏
=
=== avec)(
)()()(
)(
1
111
zk les zéros à partie réelle négative
∏ ∏
∏
= =
=
−−
−=
m
i
p
j ji
q
n
iic
zzzzz
pzgzQzC
1 1
1
)1
()(
)()()( avec
10
)1()(
)1()1( 1
<<−
−=
= −
αα
αz
zzQ
GC m
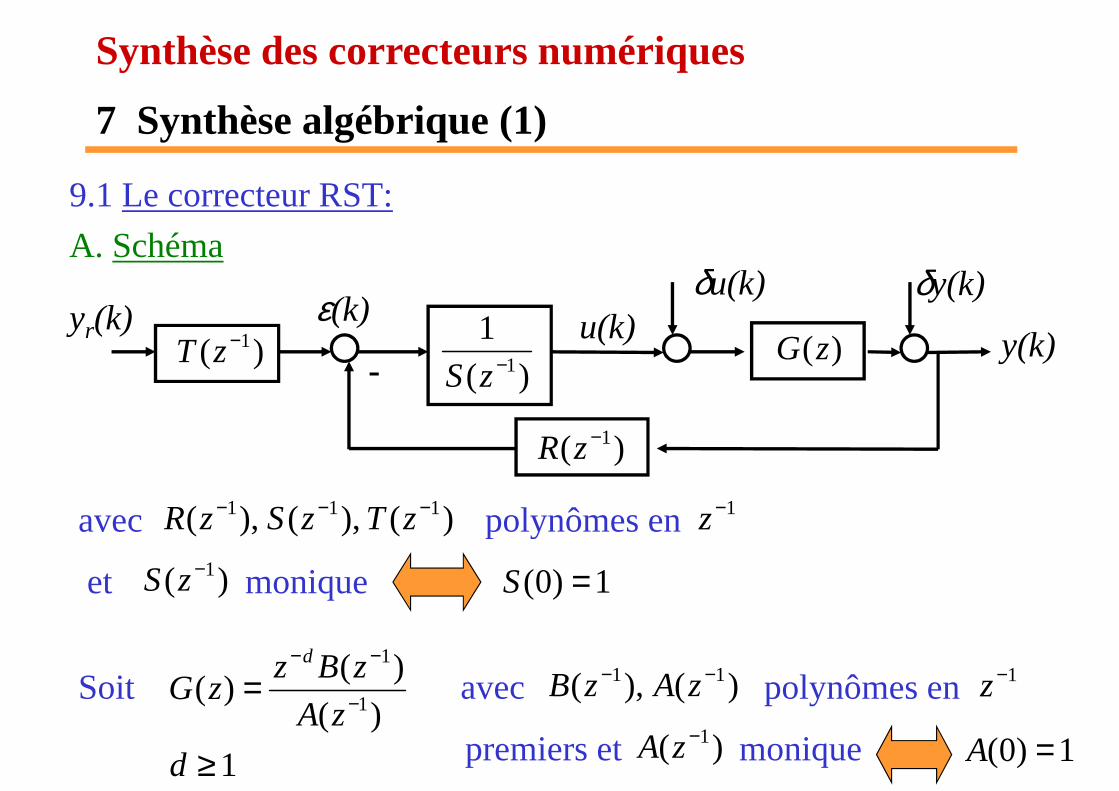
7 Synthèse algébrique (1)
Synthèse des correcteurs numériques
9.1 Le correcteur RST:
A. Schémaδu(k) δ
A. Schéma
avec 1−z
yr(k) u(k) y(k)
δu(k) δy(k)ε(k)
-)( 1−zT)(
11−zS
)( 1−zR
)(zG
)(),(),( 111 −−− zTzSzR polynômes en avec z)(),(),( zTzSzR polynômes en
et )( 1−zS monique 1)0( =S
Soit
1
)(
)()(
1
1
≥
= −
−−
d
zA
zBzzG
d
avec 1−z)(),( 11 −− zAzB polynômes en
premiers et )( 1−zA monique 1)0( =A
7 Synthèse algébrique (2)
Synthèse des correcteurs numériques
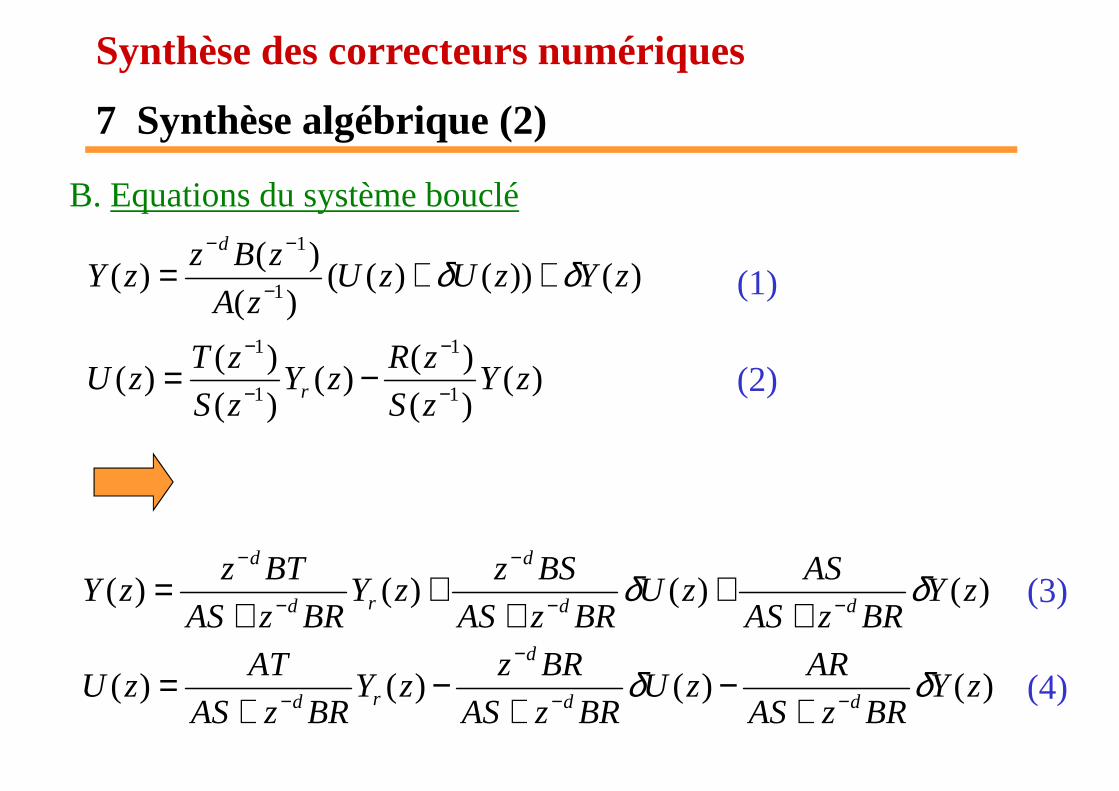
B. Equations du système bouclé
)())()(()(
)(1
zYzUzUzBz
zYd −−
++= δδ (1)
)()(
)()(
)(
)()(
)())()(()(
)()(
1
1
1
1
1
zYzS
zRzY
zS
zTzU
zYzUzUzA
zBzzY
r −
−
−
−
−
−=
++= δδ (1)
(2)
)()()()(
)()()()(
zYBRzAS
ARzU
BRzAS
BRzzY
BRzAS
ATzU
zYBRzAS
ASzU
BRzAS
BSzzY
BRzAS
BTzzY
dd
d
rd
dd
d
rd
d
δδ
δδ
−−
−
−
−−
−
−
−
+−
+−
+=
++
++
+= (3)
(4)
7 Synthèse algébrique (3)
Synthèse des correcteurs numériques
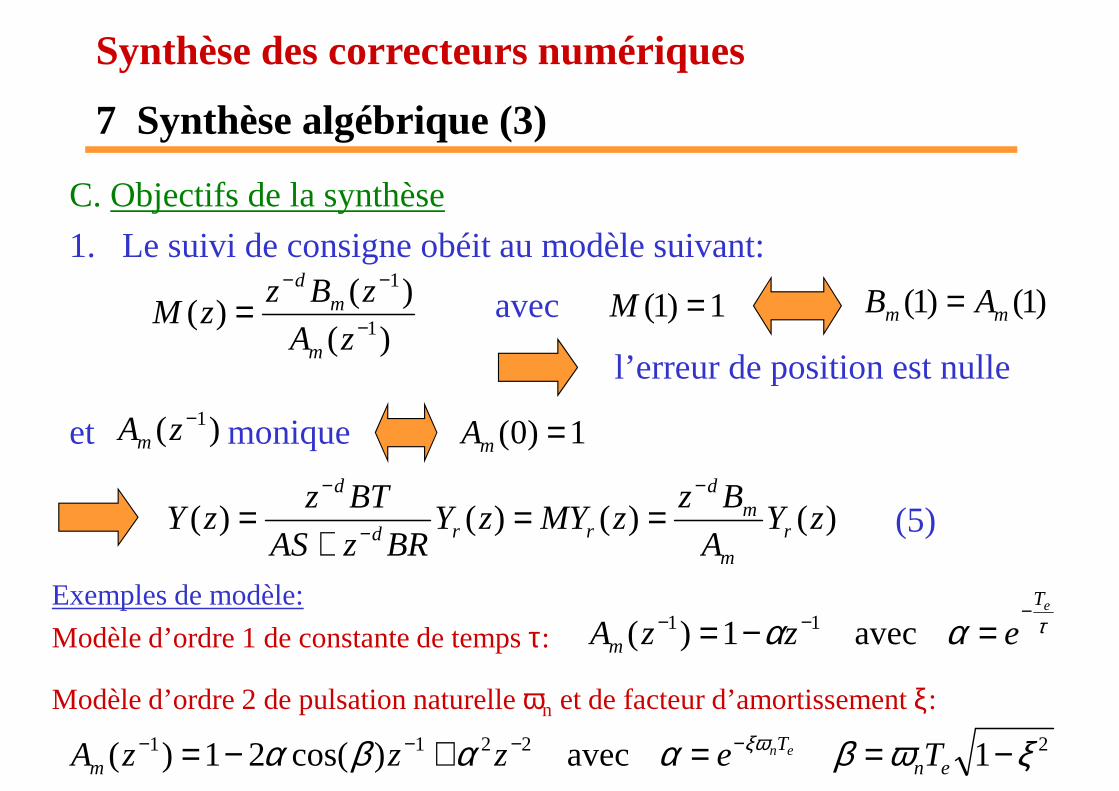
C. Objectifs de la synthèse
1. Le suivi de consigne obéit au modèle suivant:1. Le suivi de consigne obéit au modèle suivant:
)(
)()(
1
1
−
−−
=zA
zBzzM
m
md
avec 1)1( =M )1()1( mm AB =
l’erreur de position est nulle
)()()()( zYA
BzzMYzY
BRzAS
BTzzY r
md
rrd
d −
−
−
==+
= (5)
et )( 1−zAm monique 1)0( =mA
τααeT
m ezzA−−− =−= avec1)( 11
Exemples de modèle:
Modèle d’ordre 1 de constante de temps τ:
Modèle d’ordre 2 de pulsation naturelle ωn et de facteur d’amortissement ξ:
22211 1avec)cos(21)( ξωβααβα ξω −==+−= −−−−en
Tm TezzzA en
)()()()( zYA
zMYzYBRzAS
zY rm
rrd− ==+
= (5)
7 Synthèse algébrique (4)
Synthèse des correcteurs numériques
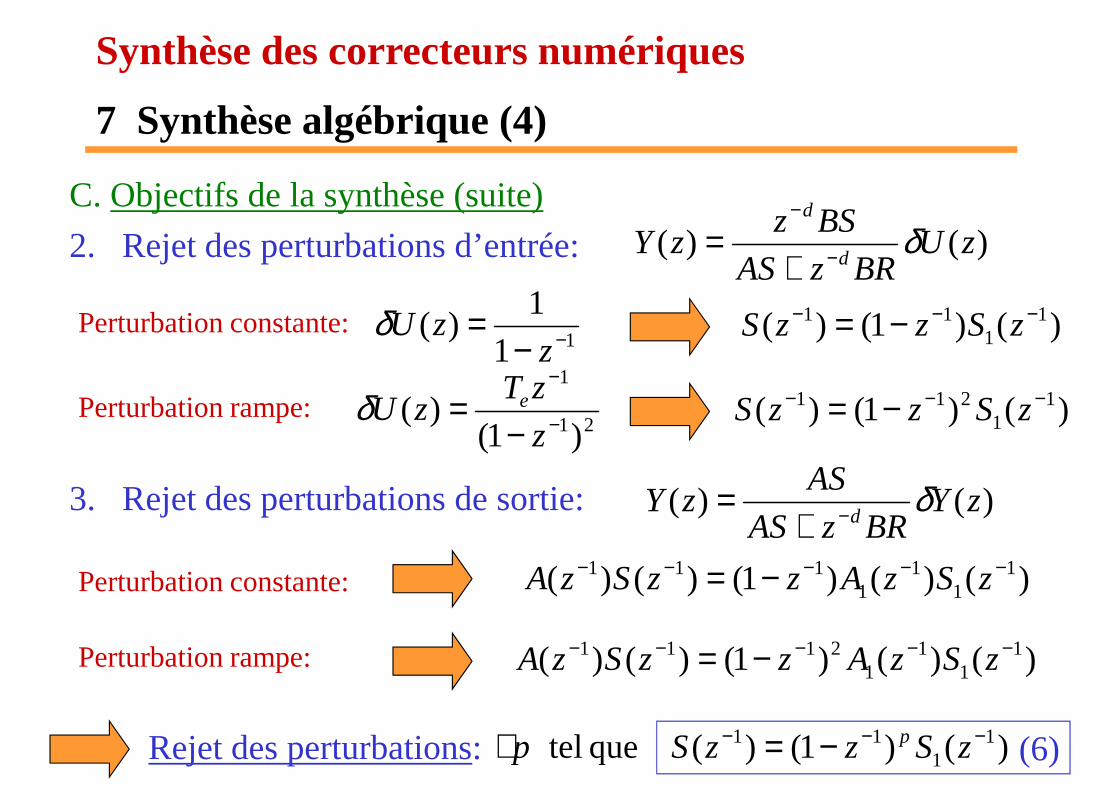
C. Objectifs de la synthèse (suite)
2. Rejet des perturbations d’entrée: )()( zUBRzAS
BSzzY
d
d
δ−
−
+=2. Rejet des perturbations d’entrée:
3. Rejet des perturbations de sortie:
11
1)( −−
=z
zUδ )()1()( 11
11 −−− −= zSzzSPerturbation constante:
BRzAS d−+
21
1
)1()( −
−
−=
z
zTzU eδ )()1()( 1
1211 −−− −= zSzzSPerturbation rampe:
)()( zYBRzAS
ASzY
dδ−+
=
Rejet des perturbations:
BRzAS+Perturbation constante:
Perturbation rampe:
)()()1()()( 11
11
111 −−−−− −= zSzAzzSzA
)()()1()()( 11
11
2111 −−−−− −= zSzAzzSzA
)()1()(que tel 11
11 −−− −=∃ zSzzSp p (6)
7 Synthèse algébrique (5)
Synthèse des correcteurs numériques
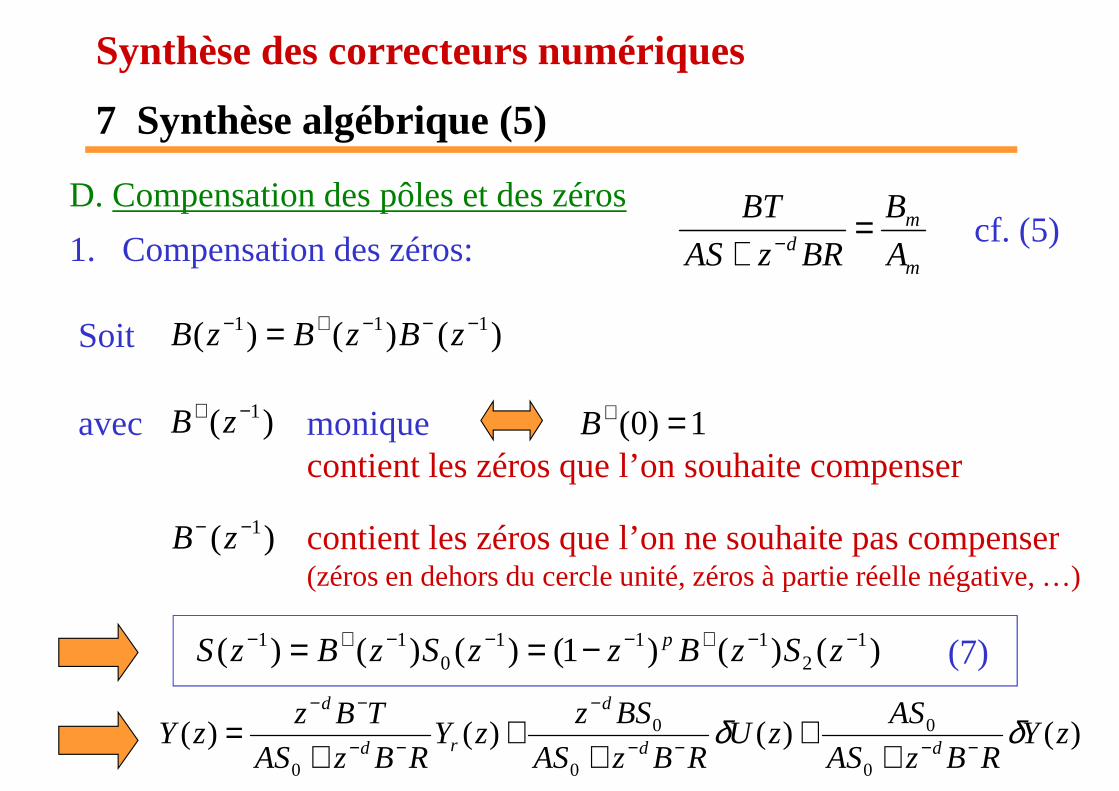
D. Compensation des pôles et des zéros
1. Compensation des zéros:m
md A
B
BRzAS
BT =+ − cf. (5)1. Compensation des zéros:
)()()( 111 −−−+− = zBzBzB
mABRzAS+
)( 1−+ zB
Soit
avec moniquecontient les zéros que l’on souhaite compenser
1)0( =+B
)( 1−− zB contient les zéros que l’on ne souhaite pas compenser
)()()1()()()( 12
1110
11 −−+−−−+− −== zSzBzzSzBzS p
)( 1−− zB contient les zéros que l’on ne souhaite pas compenser(zéros en dehors du cercle unité, zéros à partie réelle négative, …)
(7)
)()()()(0
0
0
0
0
zYRBzAS
ASzU
RBzAS
BSzzY
RBzAS
TBzzY
dd
d
rd
d
δδ −−−−
−
−−
−−
++
++
+=
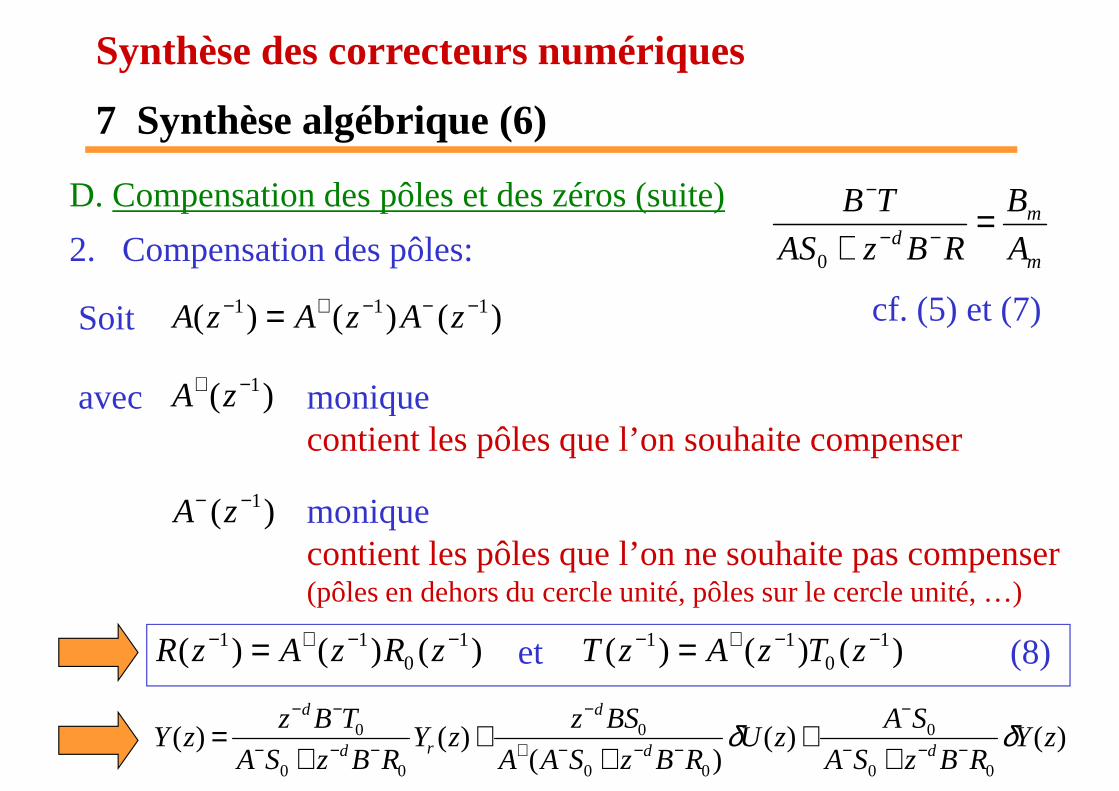
7 Synthèse algébrique (6)
Synthèse des correcteurs numériques
D. Compensation des pôles et des zéros (suite)
2. Compensation des pôles: m
md A
B
RBzAS
TB =+ −−
−
02. Compensation des pôles:
)()()( 111 −−−+− = zAzAzA
mARBzAS +0
)( 1−+ zA
cf. (5) et (7)Soit
avec moniquecontient les pôles que l’on souhaite compenser
)( 1−− zA monique
)()()()()()( 10
1110
11 −−+−−−+− == zTzAzTzRzAzR
)(zA moniquecontient les pôles que l’on ne souhaite pas compenser(pôles en dehors du cercle unité, pôles sur le cercle unité, …)
(8)
)()()(
)()(00
0
00
0
00
0 zYRBzSA
SAzU
RBzSAA
BSzzY
RBzSA
TBzzY
dd
d
rd
d
δδ −−−
−
−−−+
−
−−−
−−
++
++
+=
et
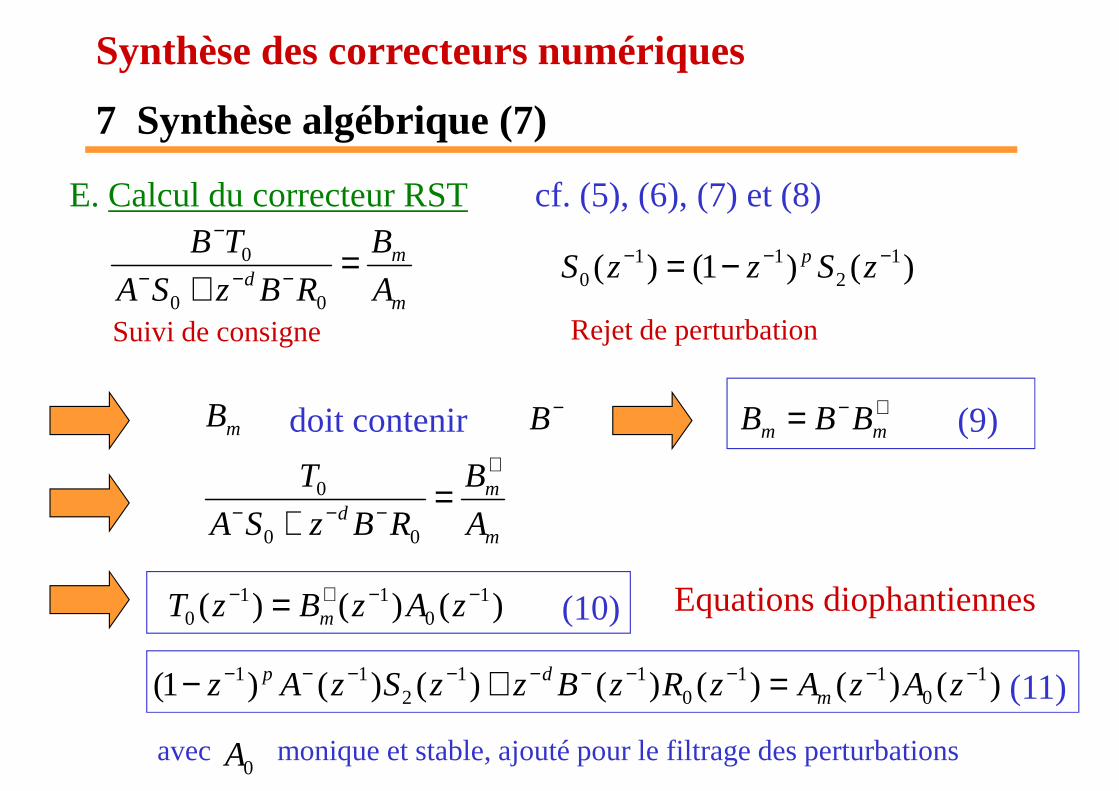
7 Synthèse algébrique (7)
Synthèse des correcteurs numériques
E. Calcul du correcteur RST
mBTB =−
0
cf. (5), (6), (7) et (8)
)()1()( 111 −−− −= zSzzS p
m
md ARBzSA
=+ −−−
00
0
mB doit contenir −B +−= mm BBB (9)
m
md A
B
RBzSA
T +
−−− =+ 00
0
)()1()( 12
110
−−− −= zSzzS p
Suivi de consigne Rejet de perturbation
)()()( 10
110
−−+− = zAzBzT m (10)
mARBzSA + 00
)()()()()()()1( 10
110
112
11 −−−−−−−−−− =+− zAzAzRzBzzSzAz mdp (11)
Equations diophantiennes
avec monique et stable, ajouté pour le filtrage des perturbations0A
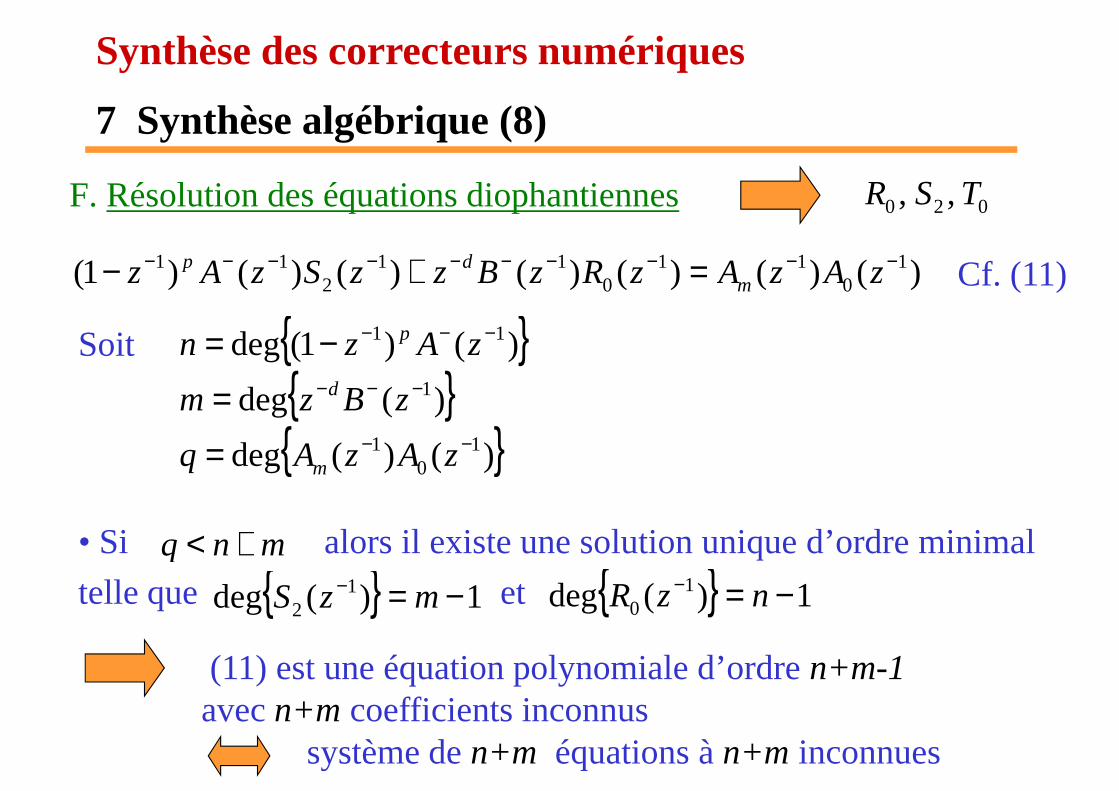
7 Synthèse algébrique (8)
Synthèse des correcteurs numériques
F. Résolution des équations diophantiennes
)()()()()()()1( 1111111 −−−−−−−−−− =+− zAzAzRzBzzSzAz dp
020 ,, TSR
Cf. (11))()()()()()()1( 10
110
112
11 −−−−−−−−−− =+− zAzAzRzBzzSzAz mdp
{ }{ }{ })()(deg
)(deg
)()1(deg
10
1
1
11
−−
−−−
−−−
=
=−=
zAzAq
zBzm
zAzn
m
d
p
• Si alors il existe une solution unique d’ordre minimal
Soit
Cf. (11)
{ } 1)(deg 12 −=− mzS
mnq +<• Si alors il existe une solution unique d’ordre minimal
telle que et { } 1)(deg 10 −=− nzR
(11) est une équation polynomiale d’ordre n+m-1avec n+m coefficients inconnus
système de n+m équations à n+m inconnues
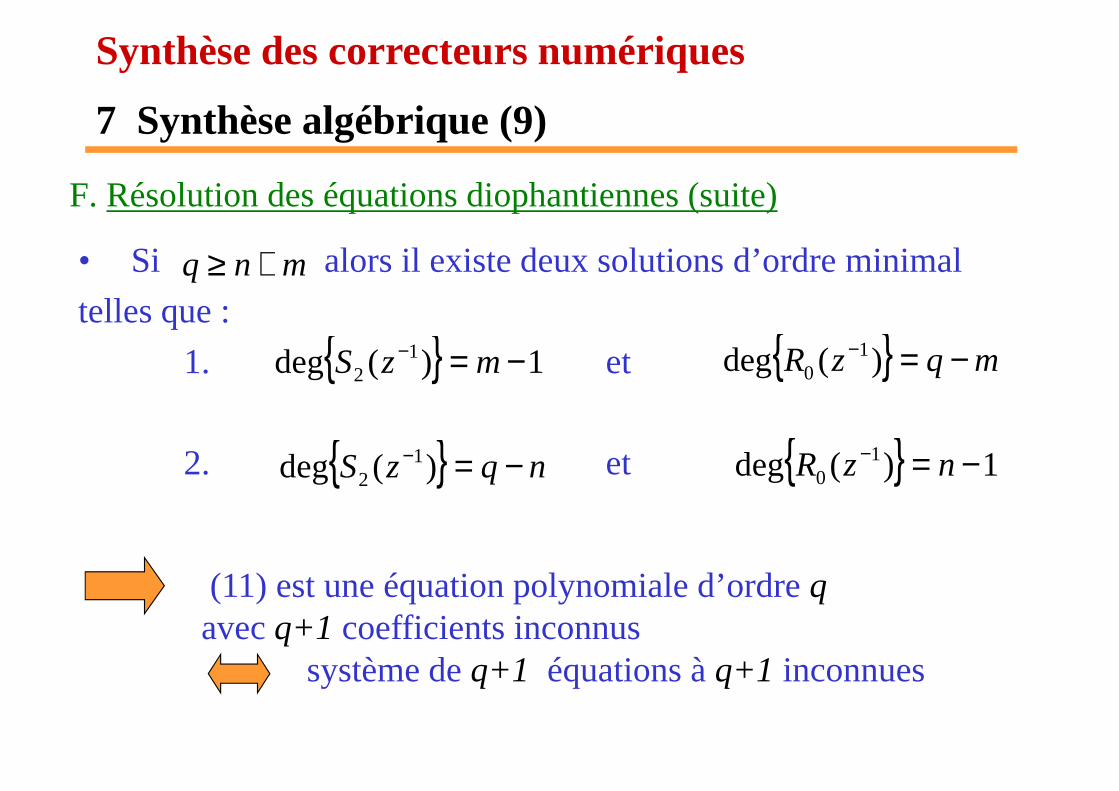
7 Synthèse algébrique (9)
Synthèse des correcteurs numériques
F. Résolution des équations diophantiennes (suite)
mnq +≥• Si alors il existe deux solutions d’ordre minimal
{ } 1)(deg 12 −=− mzS
mnq +≥• Si alors il existe deux solutions d’ordre minimal
telles que :
1. et
2. et
{ } mqzR −=− )(deg 10
{ } nqzS −=− )(deg 12 { } 1)(deg 1
0 −=− nzR
(11) est une équation polynomiale d’ordre qavec q+1 coefficients inconnus
système de q+1 équations à q+1 inconnues
7 Synthèse algébrique (10)
Synthèse des correcteurs numériques
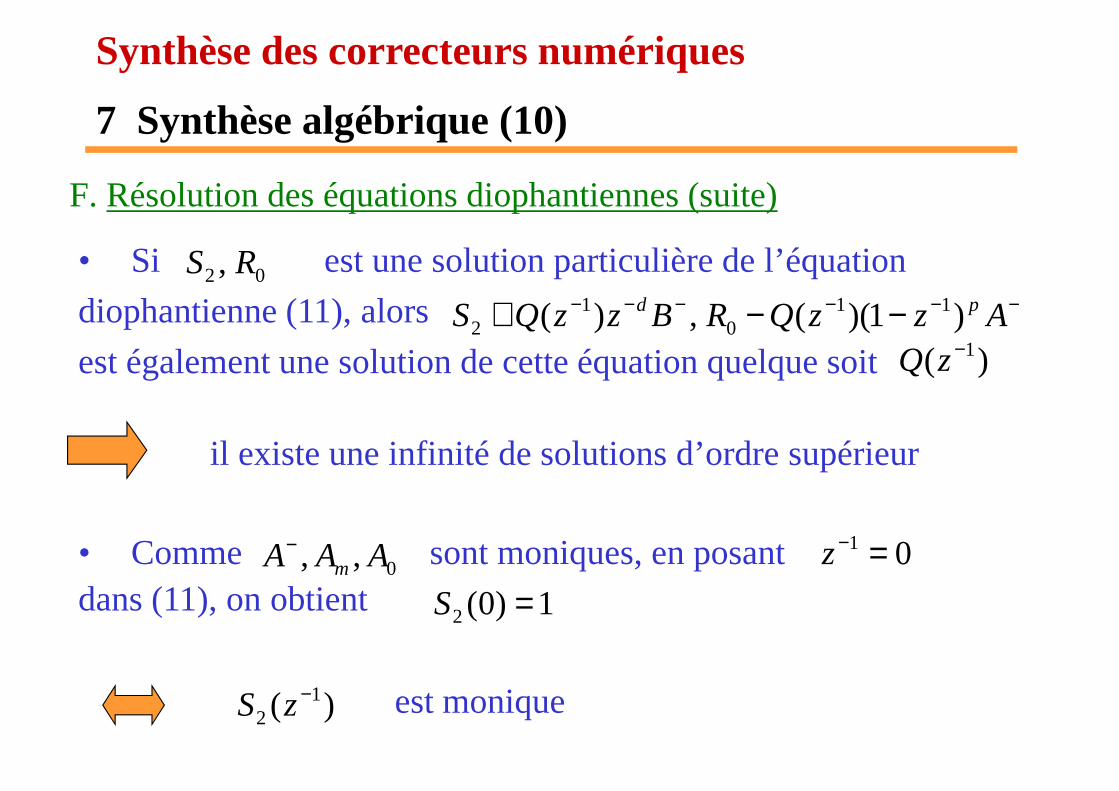
F. Résolution des équations diophantiennes (suite)
, RS• Si est une solution particulière de l’équation 02, RS• Si est une solution particulière de l’équation
diophantienne (11), alors
est également une solution de cette équation quelque soit
−−−−−− −−+ AzzQRBzzQS pd )1)((,)( 110
12
)( 1−zQ
il existe une infinité de solutions d’ordre supérieur
)( 12
−zS
0,, AAA m−• Comme sont moniques, en posant
dans (11), on obtient
est monique
1)0(2 =S
01 =−z
7 Synthèse algébrique (11)
Synthèse des correcteurs numériques
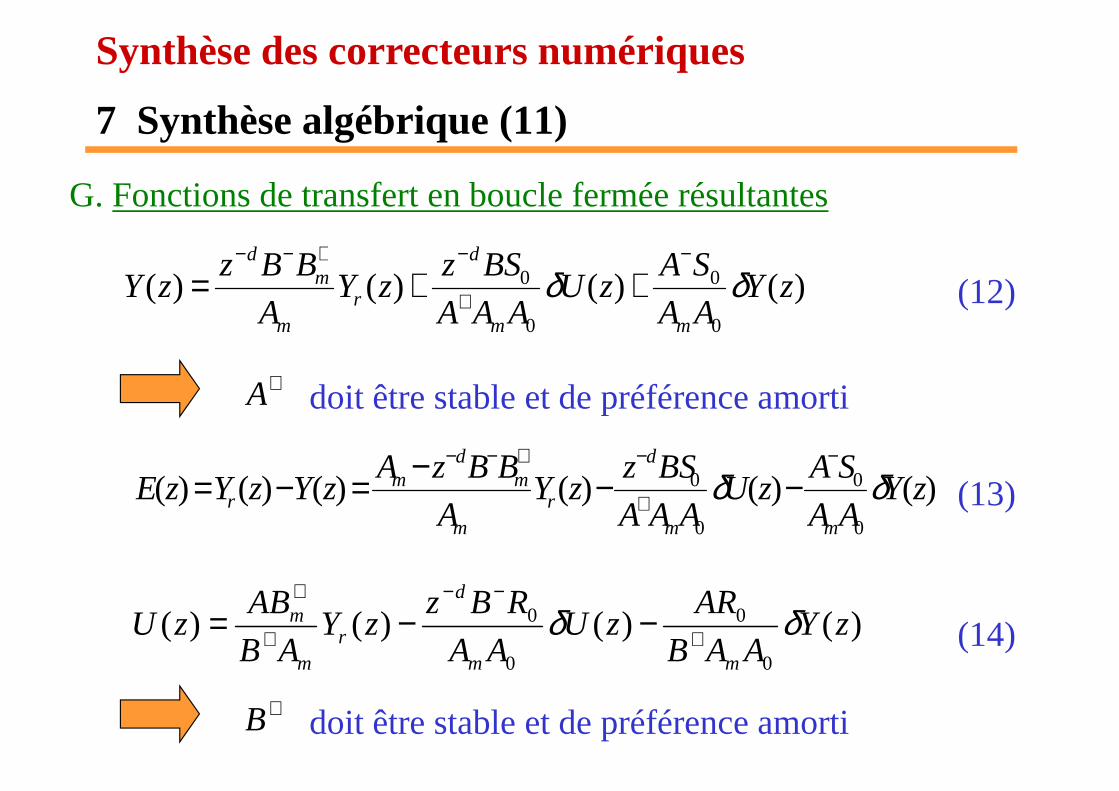
G. Fonctions de transfert en boucle fermée résultantes
SABSzBBz dd
δδ−−+−−
++= )()()()(0
0
0
0 zYAA
SAzU
AAA
BSzzY
A
BBzzY
mm
d
rm
md
δδ−
+
−+−−
++=
+A doit être stable et de préférence amorti
(12)
(13))()()()()()(0
0
0
0 zYAA
SAzU
AAA
BSzzY
A
BBzAzYzYzE
mm
d
rm
md
mr δδ
−
+
−+−−
−−−=−=
)()()()(0
0
0
0 zYAAB
ARzU
AA
RBzzY
AB
ABzU
mm
d
rm
m δδ +
−−
+
+
−−=
+B doit être stable et de préférence amorti
(14)
00 AAAAAA mmm
7 Synthèse algébrique (12)
Synthèse des correcteurs numériques
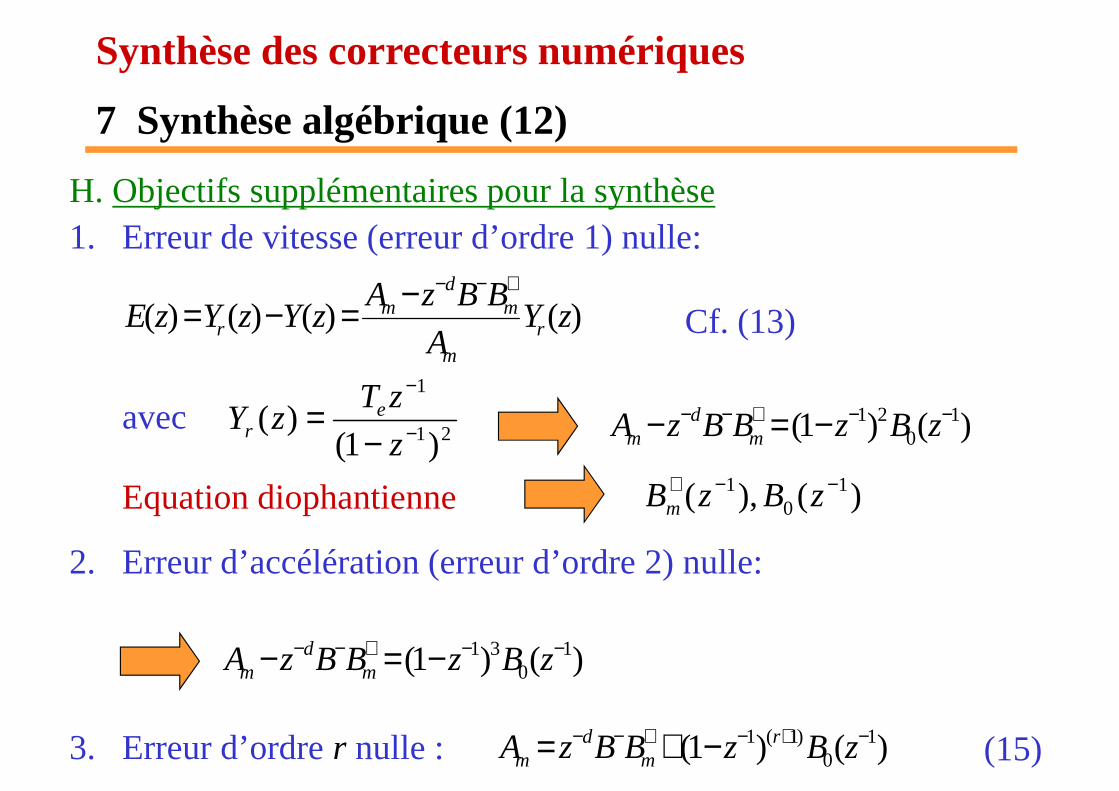
H. Objectifs supplémentaires pour la synthèse1. Erreur de vitesse (erreur d’ordre 1) nulle:
avec
)(),( 10
1 −−+ zBzBm
Cf. (13))()()()( zYA
BBzAzYzYzE r
m
md
mr
+−−−=−=
21
1
)1()( −
−
−=
z
zTzY e
r )()1( 10
21 −−+−− −=− zBzBBzA md
m
Equation diophantienne
2. Erreur d’accélération (erreur d’ordre 2) nulle:
3. Erreur d’ordre r nulle : (15)
)()1( 10
31 −−+−− −=− zBzBBzA md
m
)()1( 10
)1(1 −+−+−− −+= zBzBBzA rm
dm
7 Synthèse algébrique (13)
Synthèse des correcteurs numériques
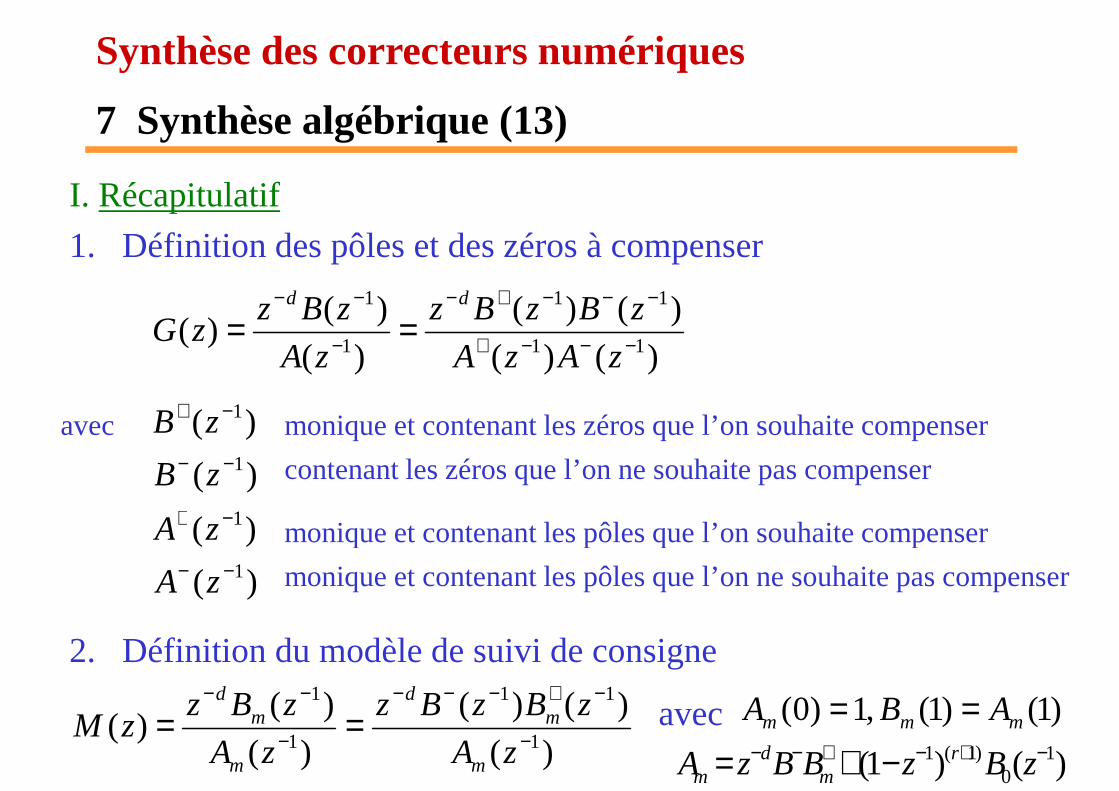
I. Récapitulatif
1. Définition des pôles et des zéros à compenser1. Définition des pôles et des zéros à compenser
)()(
)()(
)(
)()(
11
11
1
1
−−−+
−−−+−
−
−−
==zAzA
zBzBz
zA
zBzzG
dd
)( 1−+ zBavec monique et contenant les zéros que l’on souhaite compenser
)( 1−− zB contenant les zéros que l’on ne souhaite pas compenser
)( 1−+ zA monique et contenant les pôles que l’on souhaite compenser
2. Définition du modèle de suivi de consigne
)( 1−+ zA monique et contenant les pôles que l’on souhaite compenser
)( 1−− zA monique et contenant les pôles que l’on ne souhaite pas compenser
)(
)()(
)(
)()(
1
11
1
1
−
−+−−−
−
−−
==zA
zBzBz
zA
zBzzM
m
md
m
md
avec )1()1(,1)0( mmm ABA ==)()1( 1
0)1(1 −+−+−− −+= zBzBBzA r
md
m
7 Synthèse algébrique (14)
Synthèse des correcteurs numériques
I. Récapitulatif (suite)
3. Ajout d’intégrateurs pour le rejet de perturbation3. Ajout d’intégrateurs pour le rejet de perturbation
4. Choix d’un filtre supplémentaire pour les perturbations
)( 10
−zA
)()1()( 11
11 −−− −= zSzzS p
1)( 10 =−zAstable et monique par défaut
5. Résolution des équations diophantiennes
)()()()()()()1( 10
110
112
11 −−−−−−−−−− =+− zAzAzRzBzzSzAz mdp
)()()( 10
110
−−+− = zAzBzT m )(),(),( 10
12
10
−−− zTzSzR
avec )( 12
−zS monique
7 Synthèse algébrique (15)
Synthèse des correcteurs numériques
I. Récapitulatif (suite)
6. Calcul du correcteur RST6. Calcul du correcteur RST
L+++== −−−−+− 22
110
10
11 )()()( ztzttzTzAzT
L+++== −−−−+− 22
110
10
11 )()()( zrzrrzRzAzR
L+++=−= −−−−+−− 22
11
12
111 1)()()1()( zszszSzBzzS p
7. Réalisation du correcteur
L
LL
−−−−+−++−−−−−=⇒
−= −
−
−
−
)1()(
)1()()2()1()(
)()(
)()(
)(
)()(
10
1021
1
1
1
1
kyrkyr
kytkytkuskusku
zYzS
zRzY
zS
zTzU
rr
r
7 Synthèse algébrique (16)
Synthèse des correcteurs numériques
9.2 Correcteur à temps d’établissement fini:
A. Système : )()()( 111 −−−+−−−
== zBzBzzBz ddA. Système :
Soit )()(
)()(
)(
)()(
111 −−−+− ==zAzA
zBzBz
zA
zBzzG
)( 1−+ zBavec monique et contenant les zéros que l’on souhaite compenser
)( 1−− zB contenant les zéros que l’on ne souhaite pas compenser
)( 1−+ zA monique et contenant les pôles que l’on souhaite compenser
)( 1−− zA monique et contenant les pôles que l’on ne souhaite pas compenser
B. Modèle de suivi de consigne particulier:
)( 1−− zA monique et contenant les pôles que l’on ne souhaite pas compenser
)()()(
)()( 11
1
1−+−−−
−
−−
== zBzBzzA
zBzzM m
d
m
md
avec 1)1()1( =+−mBB
)()1()()(1 10
)1(111 −+−−+−−− −+= zBzzBzBz rm
d
1)( 1 =−zAm
et (erreur d’ordre r nulle)
7 Synthèse algébrique (17)
Synthèse des correcteurs numériques
9.2 Correcteur à temps d’établissement fini (suite):
C. Résolution des équations diophantiennes:C. Résolution des équations diophantiennes:
)()()()()()1( 10
10
112
11 −−−−−−−−− =+− zAzRzBzzSzAz dp
)()()( 10
110
−−+− = zAzBzT m )(),(),( 10
12
10
−−− zTzSzR
avec )( 12
−zS monique
D. Calcul du correcteur à temps d’établissement fini:
)()()( 10
11 −−+− = zTzAzT
)()()( 10
11 −−+− = zRzAzR
)()()1()( 12
111 −−+−− −= zSzBzzS p
7 Synthèse algébrique (18)
Synthèse des correcteurs numériques
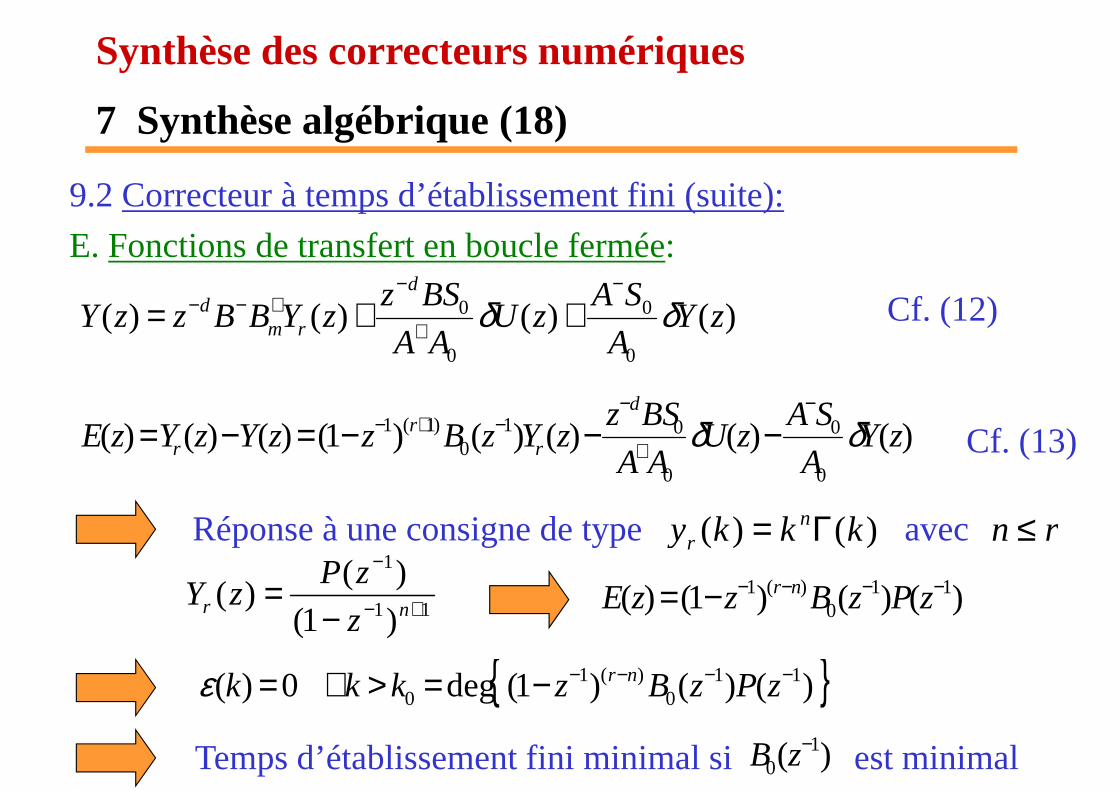
9.2 Correcteur à temps d’établissement fini (suite):
E. Fonctions de transfert en boucle fermée:E. Fonctions de transfert en boucle fermée:
)()()()(0
0
0
0 zYA
SAzU
AA
BSzzYBBzzY
d
rmd δδ
−
+
−+−− ++= Cf. (12)
Cf. (13))()()()()1()()()(0
0
0
010
)1(1 zYA
SAzU
AA
BSzzYzBzzYzYzE
d
rr
r δδ−
+
−−+− −−−=−=
Réponse à une consigne de type avec rnkkky n ≤Γ= )()(Réponse à une consigne de type avec rnkkky nr ≤Γ= )()(
11
1
)1(
)()( +−
−
−=
nr z
zPzY )()()1()( 11
0)(1 −−−−−= zPzBzzE nr
Temps d’établissement fini minimal si est minimal )( 10
−zB
{ })()()1(deg0)( 110
)(10
−−−−−=>∀= zPzBzkkk nrε
7 Synthèse algébrique (19)
Synthèse des correcteurs numériques
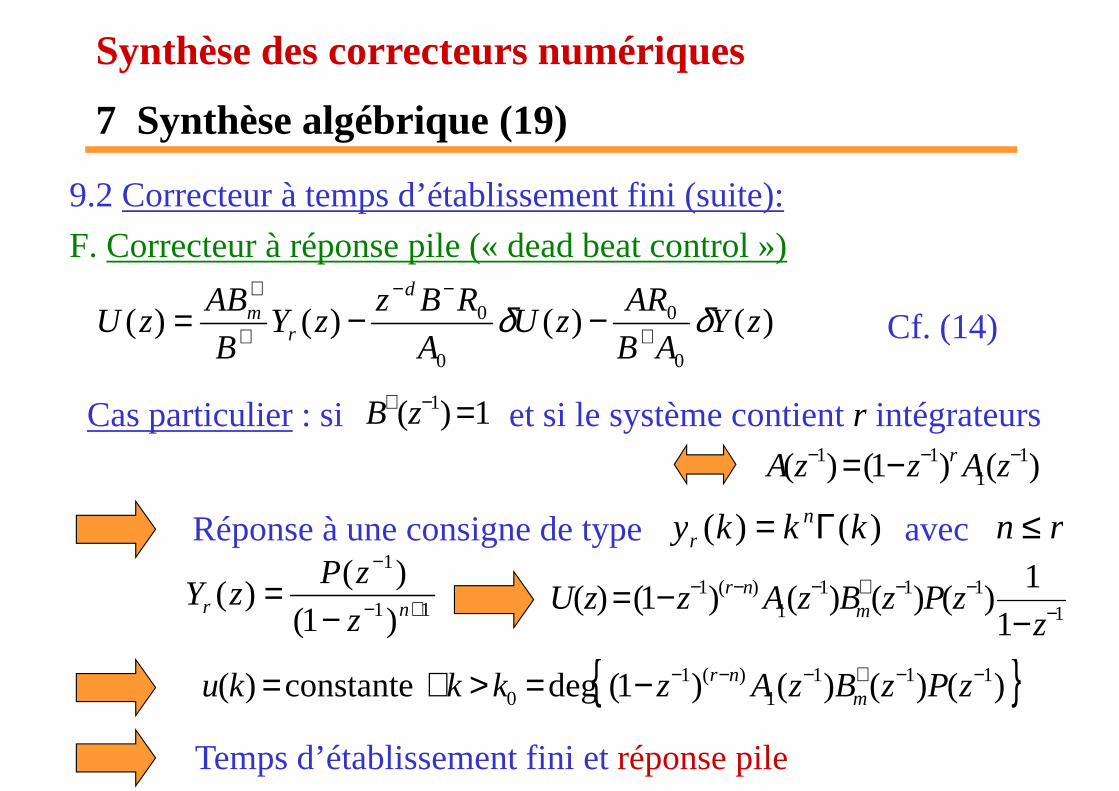
9.2 Correcteur à temps d’établissement fini (suite):
F. Correcteur à réponse pile («dead beat control»)F. Correcteur à réponse pile («dead beat control»)
Cf. (14)
Réponse à une consigne de type avec rnkkky n ≤Γ= )()(
)()()()(0
0
0
0 zYAB
ARzU
A
RBzzY
B
ABzU
d
rm δδ +
−−
+
+
−−=
Cas particulier: si et si le système contient r intégrateurs 1)( 1 =−+ zB
)()1()( 11
11 −−− −= zAzzA r
Réponse à une consigne de type avec rnkkkyr ≤Γ= )()(
11
1
)1(
)()( +−
−
−=
nr z
zPzY
1111
1)(1
1
1)()()()1()( −
−−+−−−
−−=
zzPzBzAzzU m
nr
{ })()()()1(degconstante)( 1111
)(10
−−+−−−−=>∀= zPzBzAzkkku mnr
Temps d’établissement fini et réponse pile
7 Synthèse algébrique (20)
Synthèse des correcteurs numériques
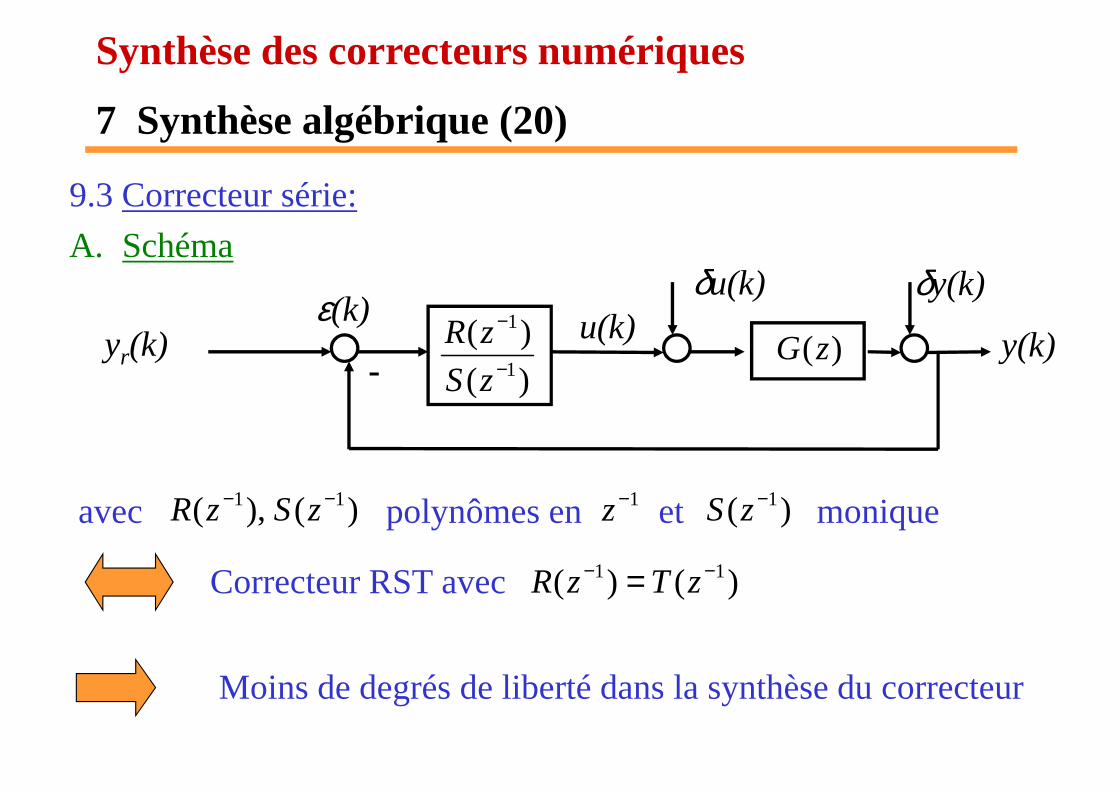
9.3 Correcteur série:
A. Schémaδu(k) δ
A. Schéma
avec 1−z
yr(k) u(k) y(k)
δu(k) δy(k)ε(k)
- )(
)(1
1
−
−
zS
zR )(zG
)(),( 11 −− zSzR polynômes en et )( 1−zS monique avec )(),( zSzR polynômes en et )(zS monique
)()( 11 −− = zTzRCorrecteur RST avec
Moins de degrés de liberté dans la synthèse du correcteur
7 Synthèse algébrique (21)
Synthèse des correcteurs numériques
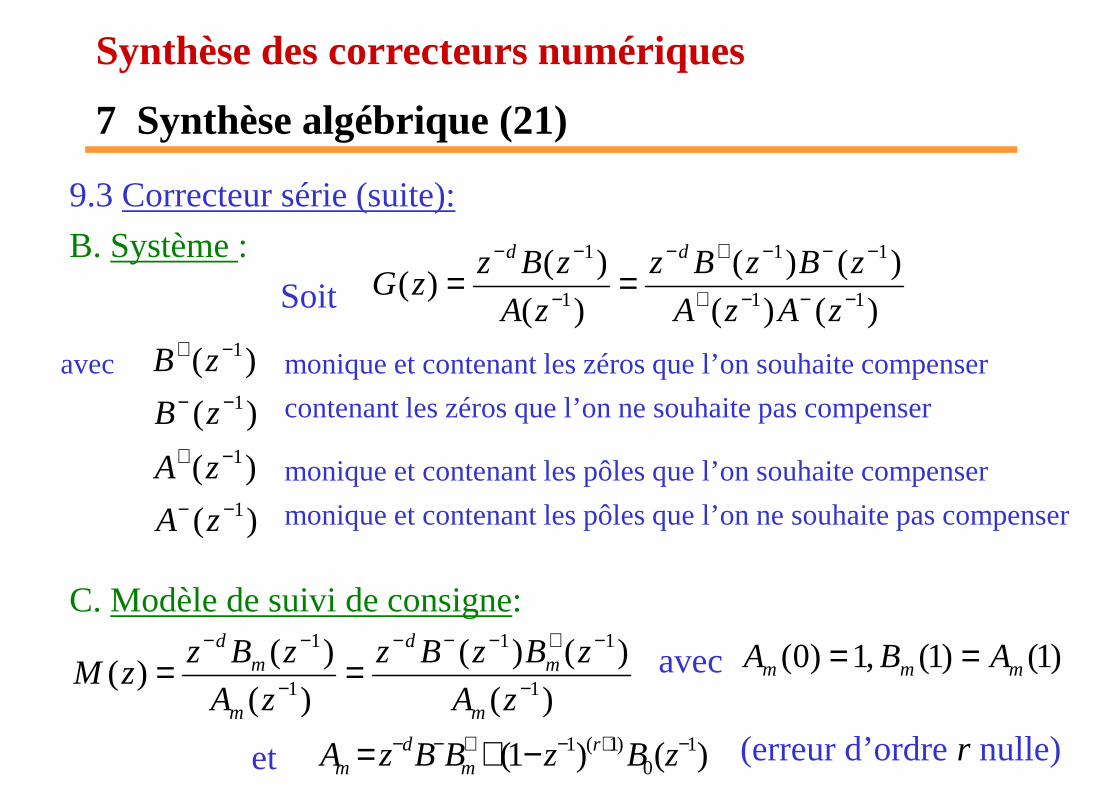
9.3 Correcteur série (suite):
B. Système : )()()( 111 −−−+−−−
== zBzBzzBz ddB. Système :
Soit )()(
)()(
)(
)()(
111 −−−+− ==zAzA
zBzBz
zA
zBzzG
)( 1−+ zBavec monique et contenant les zéros que l’on souhaite compenser
)( 1−− zB contenant les zéros que l’on ne souhaite pas compenser
)( 1−+ zA monique et contenant les pôles que l’on souhaite compenser
)( 1−− zA monique et contenant les pôles que l’on ne souhaite pas compenser
C. Modèle de suivi de consigne:
)(zA monique et contenant les pôles que l’on ne souhaite pas compenser
et (erreur d’ordre r nulle)
)(
)()(
)(
)()(
1
11
1
1
−
−+−−−
−
−−
==zA
zBzBz
zA
zBzzM
m
md
m
md
avec )1()1(,1)0( mmm ABA ==
)()1( 10
)1(1 −+−+−− −+= zBzBBzA rm
dm
7 Synthèse algébrique (22)
Synthèse des correcteurs numériques
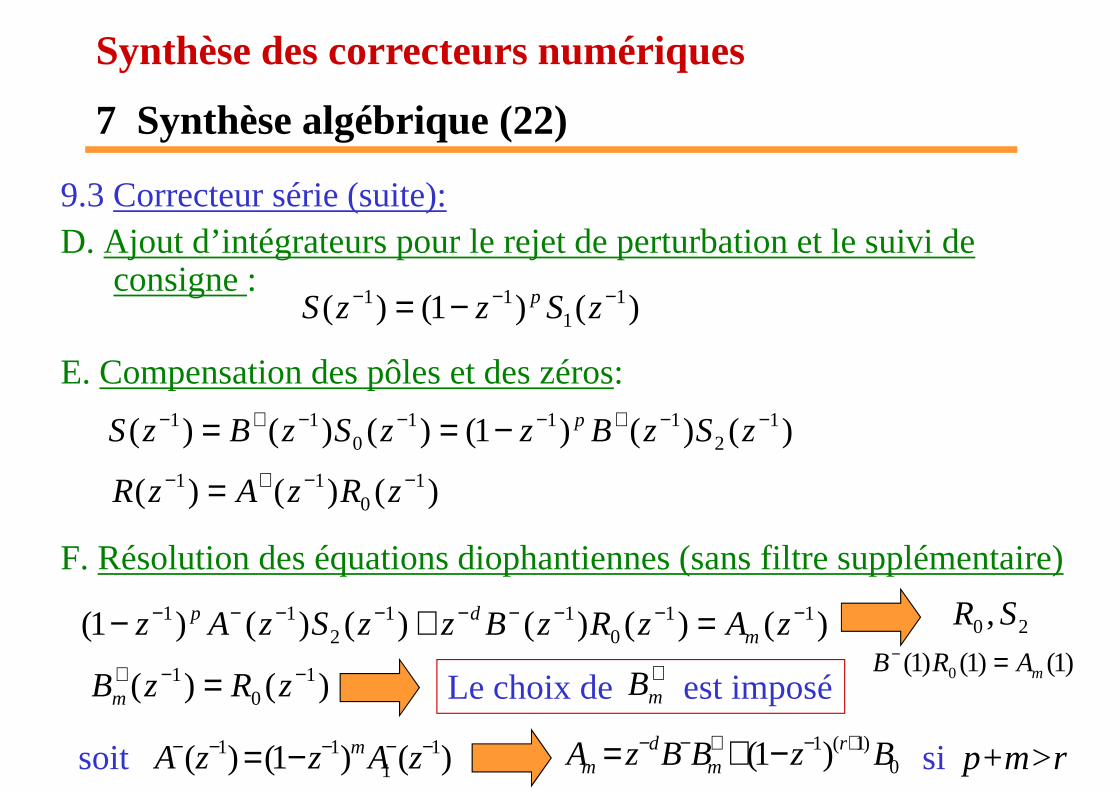
9.3 Correcteur série (suite):D. Ajout d’intégrateurs pour le rejet de perturbation et le suivi de
consigne :consigne :
E. Compensation des pôles et des zéros:
)()1()( 11
11 −−− −= zSzzS p
)()()1()()()( 12
1110
11 −−+−−−+− −== zSzBzzSzBzS p
)()()( 10
11 −−+− = zRzAzR
F. Résolution des équations diophantiennes (sans filtre supplémentaire)
)()( 10
1 −−+ = zRzBm
)()()()()()1( 110
112
11 −−−−−−−−− =+− zAzRzBzzSzAz mdp
20,SR
Le choix de est imposé+mB
)1()1()1( 0 mARB =−
0)1(1)1( BzBBzA r
md
m+−+−− −+= si p+m>rsoit )()1()( 1
111 −−−−− −= zAzzA m
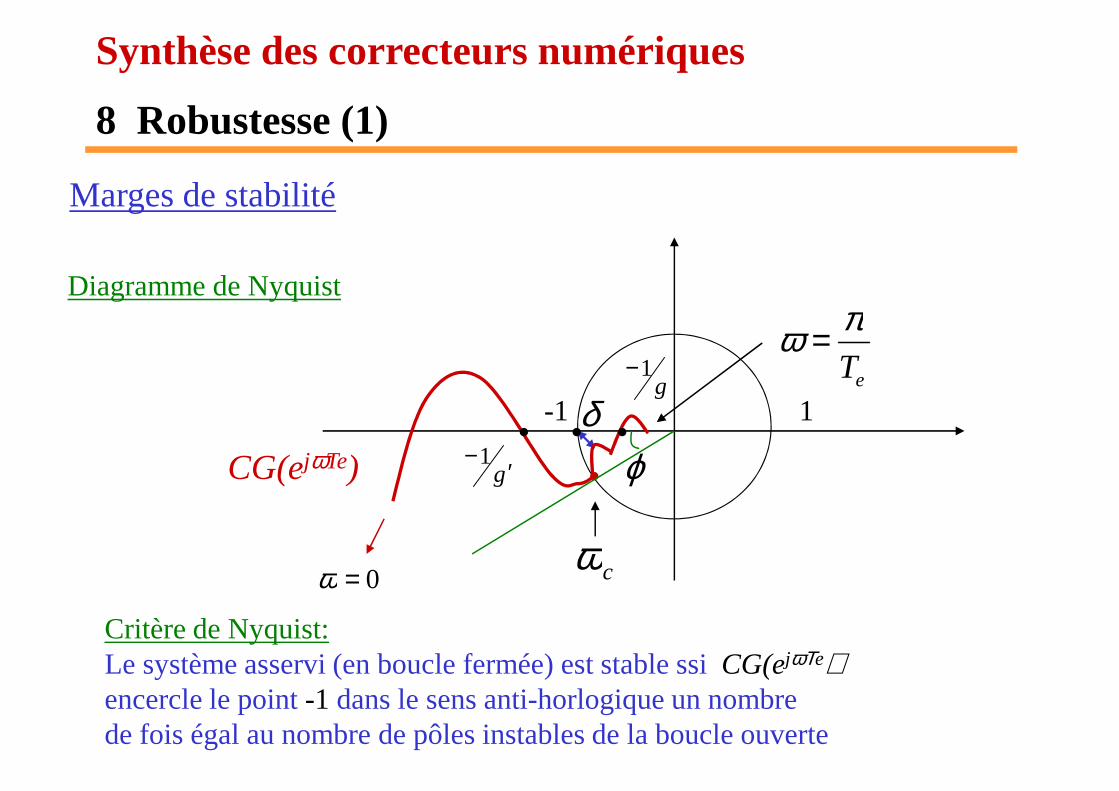
Marges de stabilité
8 Robustesse (1)
Synthèse des correcteurs numériques
••
CG(ejωTe)
1-1•
ϕδ
g1−
g′−1
•
Diagramme de Nyquist
eT
πω =
cω
Critère de Nyquist:Le système asservi (en boucle fermée) est stable ssi CG(ejωΤe)encercle le point -1 dans le sens anti-horlogique un nombre de fois égal au nombre de pôles instables de la boucle ouverte
0=ω
Marges de stabilité (suite)
A. Marge de phase ϕϕϕϕ
8 Robustesse (2)
Synthèse des correcteurs numériques
B. Marge de retard ττττ
= retard qui entraîne l’instabilité
A. Marge de phase ϕϕϕϕ
= déphasage qui entraîne l’instabilité (retard de phase)
{ } ( )( )
eci
i
i
Tji
Tjci
T
eCG
eCG
eci
eci
ωϕτ
πϕ
ωω
ω
min
argsoit
1que tellespulsations lessoit
=⇒
+=
=
Marges de stabilité (suite)
C. Marges de gain g et g’ < 1
8 Robustesse (3)
Synthèse des correcteurs numériques
D. Marge de moduleδδδδ
= distance minimale entre CG(ejωΤe) et -1
C. Marges de gain g et g’ < 1
= gain qui entraîne l’instabilité
= distance minimale entre CG(e ) et -1
{ }∞
∈
∈=⇒
+
=+=S
eCG
eCG
e
e
Tj
Tj 1
)(11
sup
1)(1inf δδ
ωω
ω
ω
R
R
∞∞∞= LH ou norme