Embed Size (px)
Citation preview
Télécom Physique de Strasbourg Bureau C418 – courriel : [email protected]
Université de Strasbourg, FRANCE
Christophe DOIGNON
Professeur
Membre de l’IEEE Robotics and Automation Society (depuis 1998)
Robotique Médicale
FIP 3A, TIC pour la Santé (édition 2013-2014)
1
RI-MAN, robot médical du RIKEN Bio-Mimetic Control Research Center, Japon (2006)

Robotique médicaleDu recalage à la navigation et l’assistance par l’imagerie médicale
et autres capteurs...
Christophe DOIGNON (coordinateur du cours) 1
1Télécom Physique Strasbourg
[edition 2013-2014 - FIP TIC-S 3A]
Université de Strasbourg
Christophe DOIGNON Robotique médicale
Contributeurs
Sandrine VOROS (Laboratoire TIMC/GMCAO, CR INSERM),CHU GrenobleAlexandre KRUPA (IRISA/Lagadic, CR INRIA), Centre deRennesFlorent NAGEOTTE (UFR Physique et Ingénierie, MCF), Unistra,Michel de MATHELIN (Télécom Physique, PU - Dir. ICube),Unistra,Christophe DOIGNON (Télécom Physique, PU), Unistra
Christophe DOIGNON Robotique médicale
Télécom Physique (Edition 2013-2014) Robotique Médicale – Ch. DOIGNON
2
Chapitre 1 : Introduction (M. de MATHELIN et Ch. DOIGNON) • Introduction à la robotique médicale et définitions • Les problèmes ouverts • Assistance médicale : un succès • La robotique médicale en France
Chapitre 2 : le recalage en robotique médicale (F. NAGEOTTE et Ch. DOIGNON) • Introduction • Matériel et méthodes pour le recalage • Exemple de systèmes de recalage pour la robotique médicale (orthopédie, endoscopie,
radiologie, neurologie)
Chapitre 3 : La robotique médicale par l’échographie à ultra-sons (A. KRUPA)
Chapitre 4 : Les GMCAO (S. VOROS)
Plan du cours
Télécom Physique (Edition 2013-2014) Robotique Médicale – Ch. DOIGNON
Chapitre 1 Introduction
3
Télécom Physique (Edition 2013-2014) Robotique Médicale – Ch. DOIGNON
4
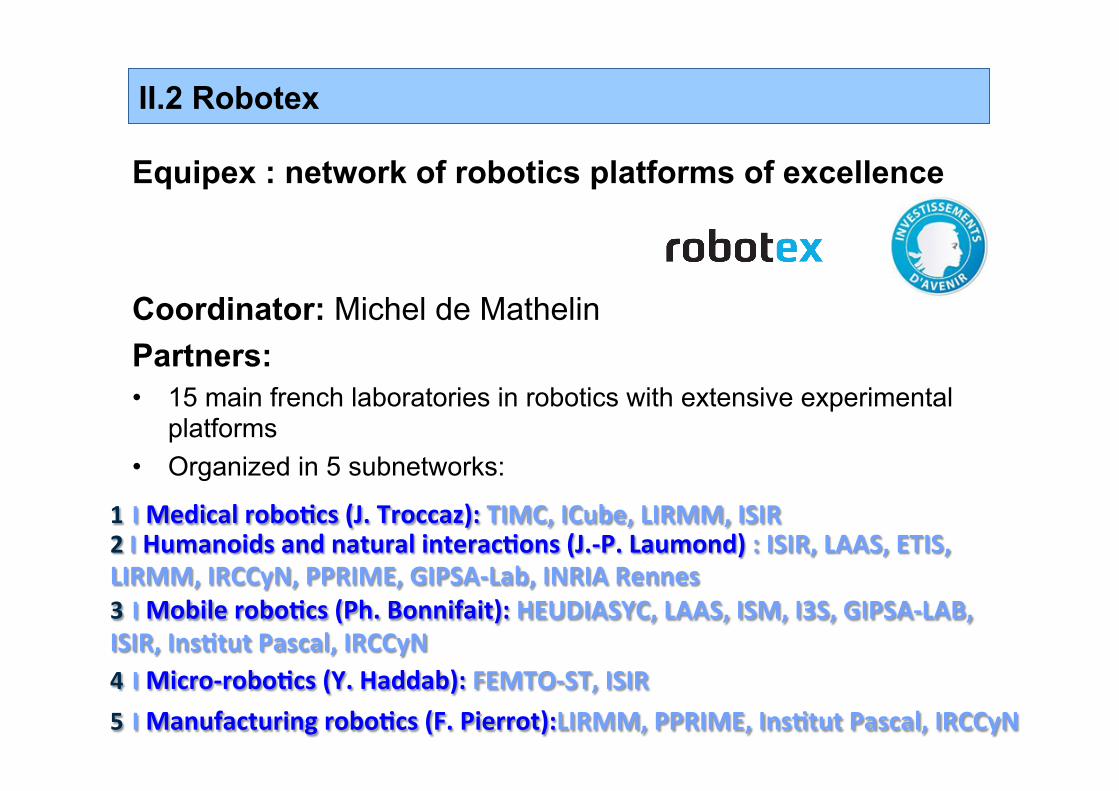
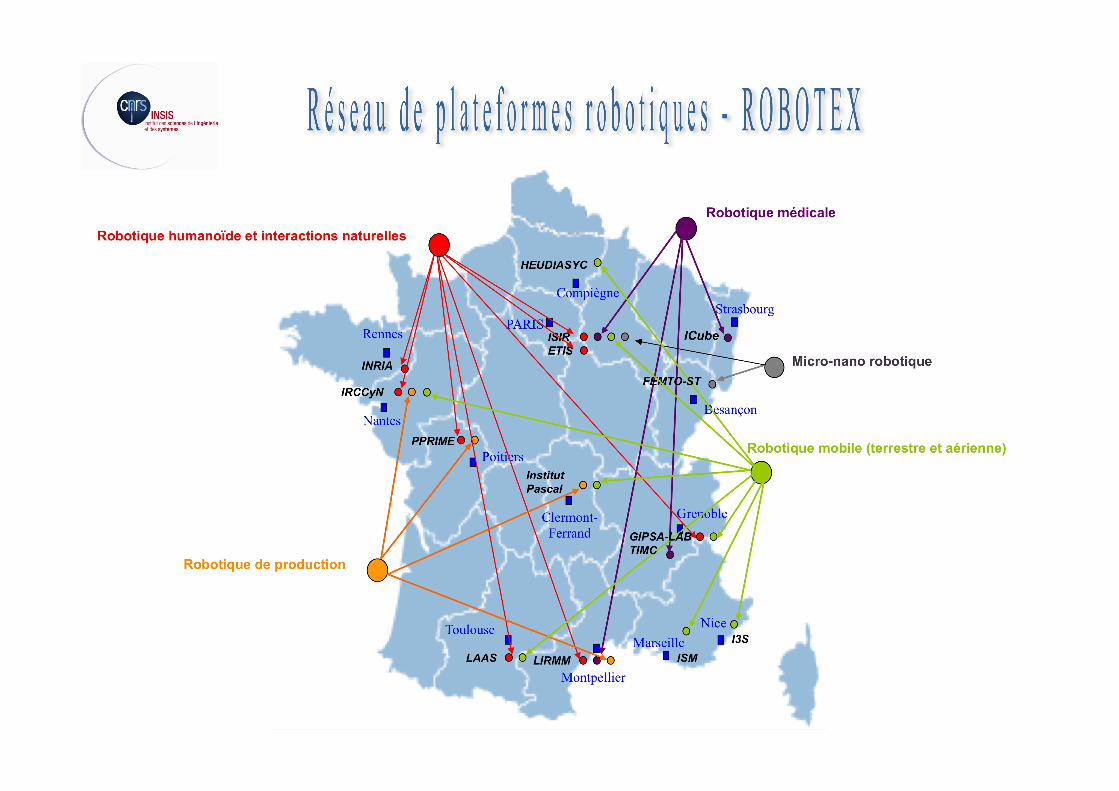
Equipex : network of robotics platforms of excellence Coordinator: Michel de Mathelin Partners: • 15 main french laboratories in robotics with extensive experimental
platforms • Organized in 5 subnetworks:
II.2 Robotex
1 I Medical robo.cs (J. Troccaz): TIMC, ICube, LIRMM, ISIR 2 I Humanoids and natural interac.ons (J.-‐P. Laumond) : ISIR, LAAS, ETIS,
LIRMM, IRCCyN, PPRIME, GIPSA-‐Lab, INRIA Rennes 3 I Mobile robo.cs (Ph. Bonnifait): HEUDIASYC, LAAS, ISM, I3S, GIPSA-‐LAB, ISIR, Ins.tut Pascal, IRCCyN
4 I Micro-‐robo.cs (Y. Haddab): FEMTO-‐ST, ISIR
5 I Manufacturing robo.cs (F. Pierrot):LIRMM, PPRIME, Ins.tut Pascal, IRCCyN
II.2 Robotex
I.1 Definitions (1)
Medical Robotics: I. Surgical and medical assistance systems: Robotics to assist doctors and surgeons – This presentation II. Assistive technologies and rehabilitation robotics: Robotics to assist people (elderly, disabled, injured, …)
– Prothetic devices, artificial limbs, orthotic devices, … – Active implants, functional electro-stimulation, … – Robotic moving and manipulation aids, smart living spaces, … – Rehabilitation robotics for therapy and training
Télécom Physique (Edition 2013-2014) Robotique Médicale – Ch. DOIGNON
5
I.1 Definitions (1)
Medical Robotics: I. Surgical and medical assistance systems: Robotics to assist doctors and surgeons – This presentation II. Assistive technologies and rehabilitation robotics: Robotics to assist people (elderly, disabled, injured, …)
– Prothetic devices, artificial limbs, orthotic devices, … – Active implants, functional electro-stimulation, … – Robotic moving and manipulation aids, smart living spaces, … – Rehabilitation robotics for therapy and training
I.1 Definitions (2)
What robotics can do (to assist doctors) … Automation and Robotic tasks: 1. Registration: localization of the instrument with respect to the patient
with reference to the pre-operative planning thanks to intra-operative imaging and 3D measurement devices.
2. Positioning : 3D positioning of instruments with respect to the patient 3. Trajectory tracking: tracking with the instrument of a planned trajectory
with respect to the patient 4. Comanipulation : manual manipulation of an instrument constraint in
position, velocity or force, by a robotic device 5. Telemanipulation : telemanipulation from a distance of an instrument 6. Exploration: exploration of a partially unknown environment 7. Simulation: execution of the previous tasks in a virtual environment with
a physical human-machine interface
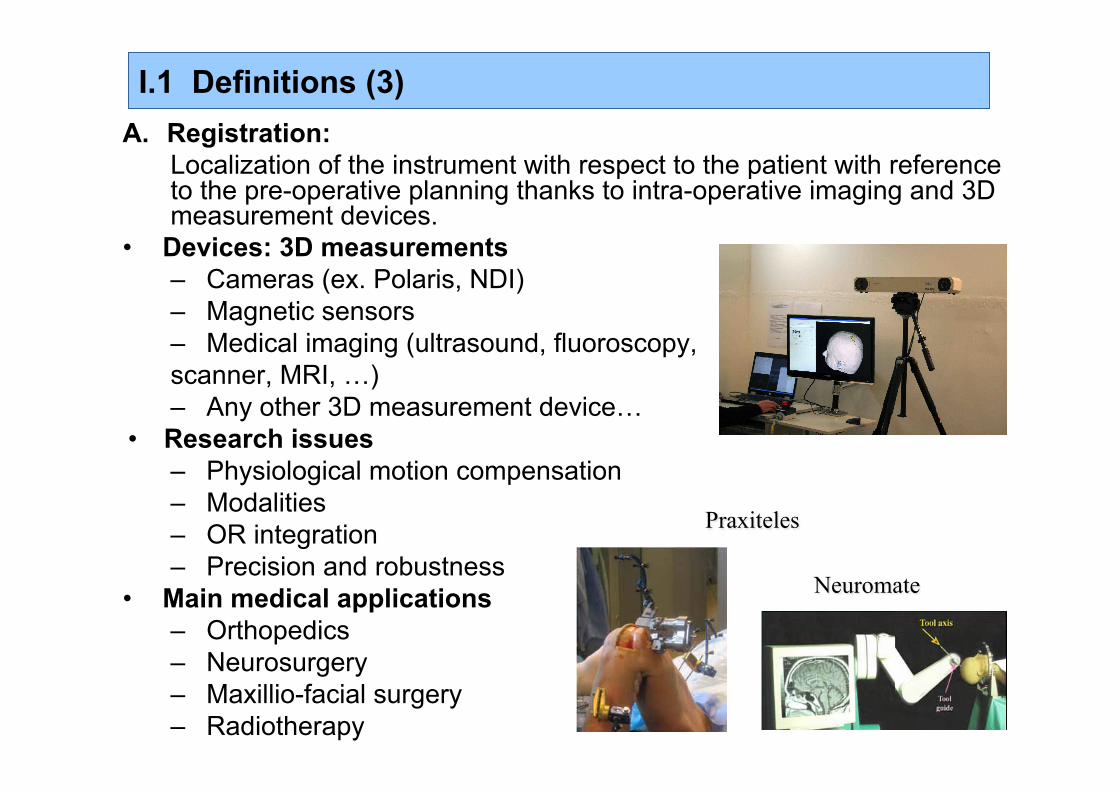
I.1 Definitions (3) A. Registration:
Localization of the instrument with respect to the patient with reference to the pre-operative planning thanks to intra-operative imaging and 3D measurement devices.
• Devices: 3D measurements – Cameras (ex. Polaris, NDI) – Magnetic sensors – Medical imaging (ultrasound, fluoroscopy, scanner, MRI, …) – Any other 3D measurement device…
• Research issues – Physiological motion compensation – Modalities – OR integration – Precision and robustness
• Main medical applications – Orthopedics – Neurosurgery – Maxillio-facial surgery – Radiotherapy
Praxiteles
Neuromate
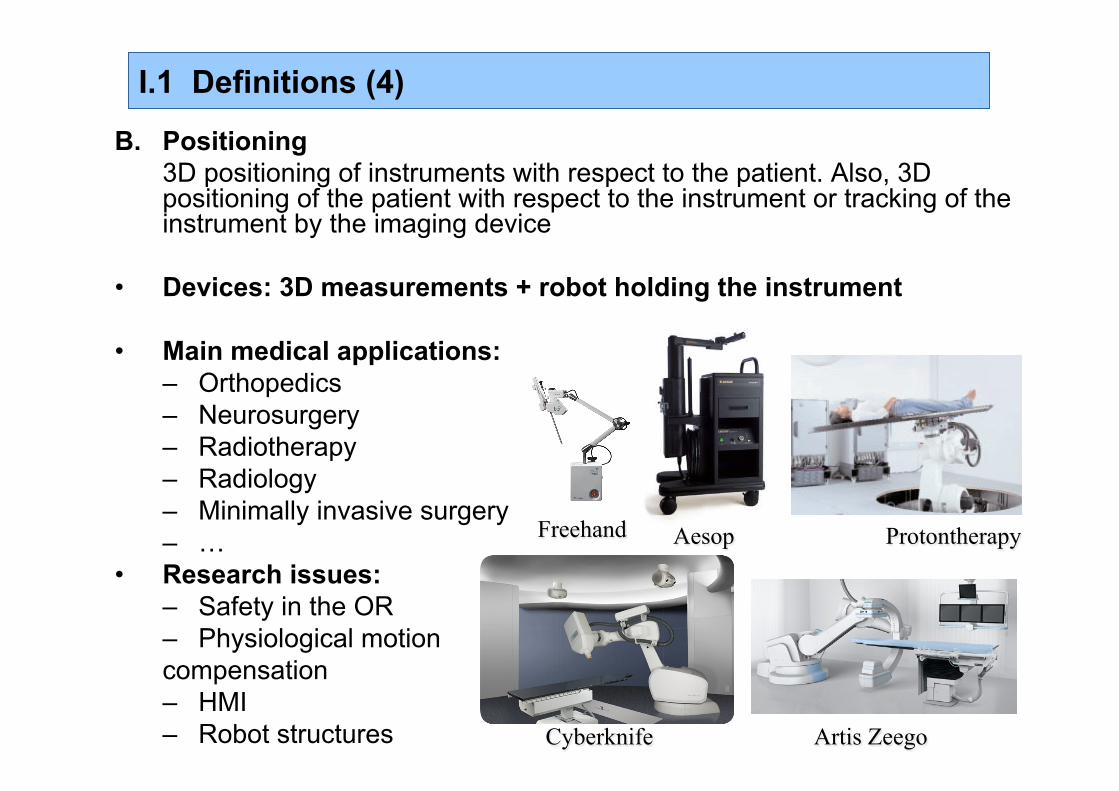
I.1 Definitions (4)
B. Positioning 3D positioning of instruments with respect to the patient. Also, 3D positioning of the patient with respect to the instrument or tracking of the instrument by the imaging device
• Devices: 3D measurements + robot holding the instrument
• Main medical applications:
– Orthopedics – Neurosurgery – Radiotherapy – Radiology – Minimally invasive surgery – …
• Research issues: – Safety in the OR – Physiological motion compensation – HMI – Robot structures
Aesop
Artis Zeego Cyberknife
Protontherapy Freehand
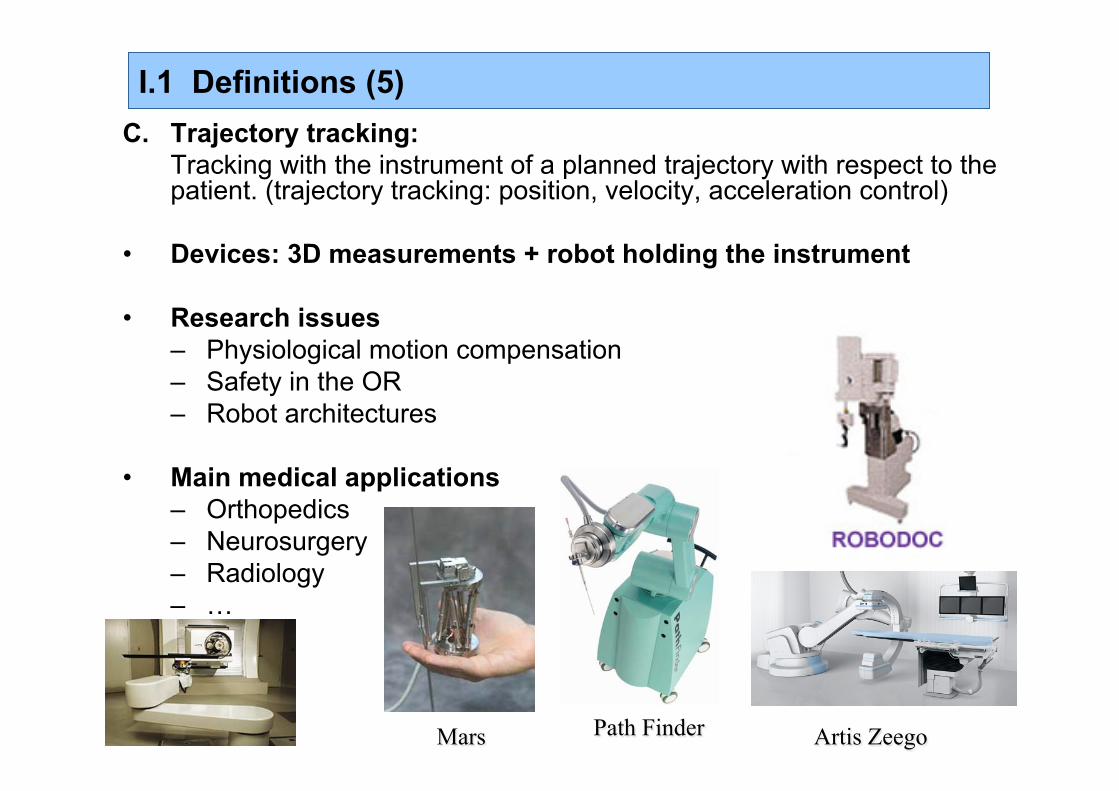
I.1 Definitions (5) C. Trajectory tracking:
Tracking with the instrument of a planned trajectory with respect to the patient. (trajectory tracking: position, velocity, acceleration control)
• Devices: 3D measurements + robot holding the instrument • Research issues
– Physiological motion compensation – Safety in the OR – Robot architectures
• Main medical applications – Orthopedics – Neurosurgery – Radiology – …
Artis Zeego Path Finder Mars
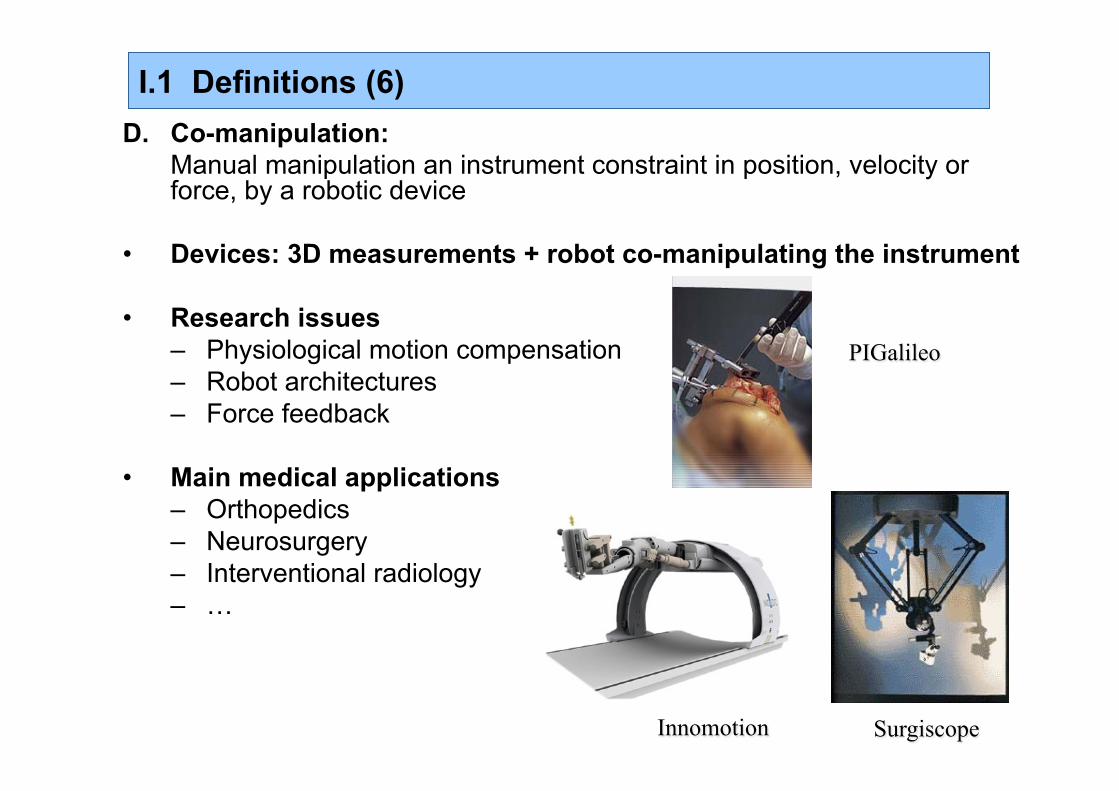
I.1 Definitions (6) D. Co-manipulation:
Manual manipulation an instrument constraint in position, velocity or force, by a robotic device
• Devices: 3D measurements + robot co-manipulating the instrument • Research issues
– Physiological motion compensation – Robot architectures – Force feedback
• Main medical applications – Orthopedics – Neurosurgery – Interventional radiology – …
Surgiscope
PIGalileo
Innomotion
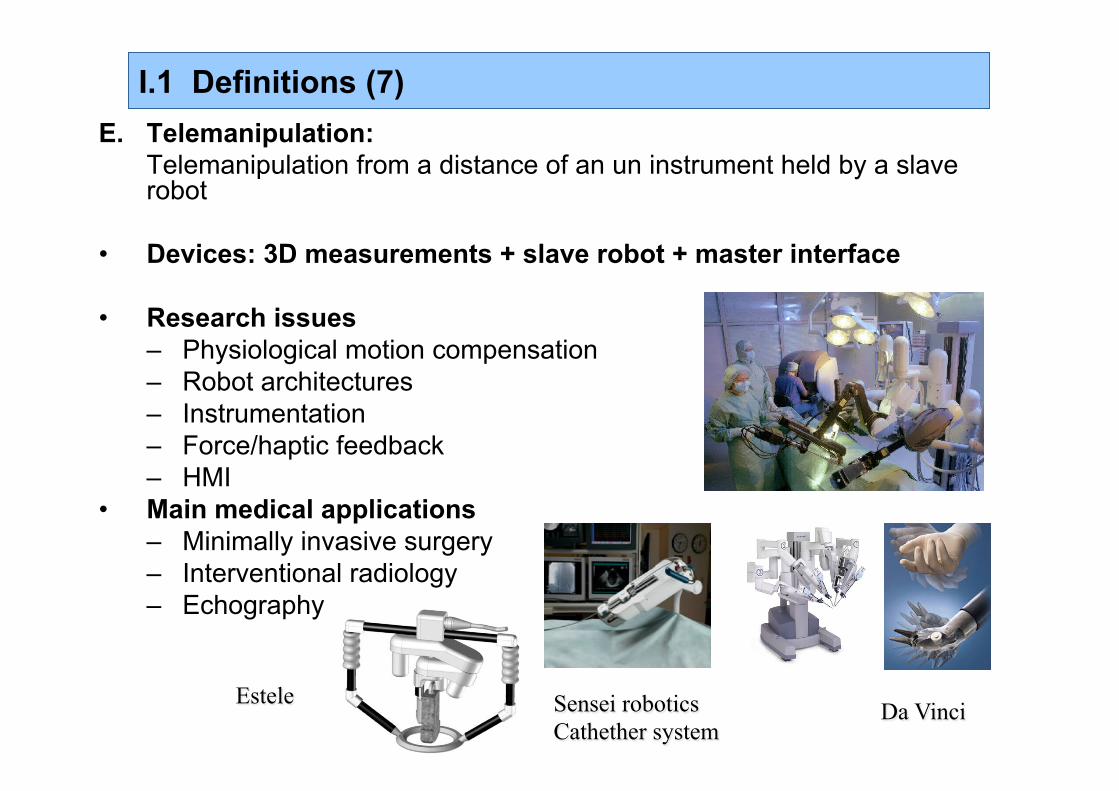
I.1 Definitions (7) E. Telemanipulation:
Telemanipulation from a distance of an un instrument held by a slave robot
• Devices: 3D measurements + slave robot + master interface • Research issues
– Physiological motion compensation – Robot architectures – Instrumentation – Force/haptic feedback – HMI
• Main medical applications – Minimally invasive surgery – Interventional radiology – Echography
Da Vinci Estele Sensei robotics
Cathether system
I.2 Specific issues (1)
• Safety The robot is expected to create no injuries to the patient or
the medical staff: – Redundant sensors – Workspace, velocity, force constrains – Safe mechanical design – Software, electronic and mechanical fuses – Manual procedure remains possible – Automatic docking – Small relative increase of the duration of the surgery – Surgeon in the loop – Others
I.2 Specific issues (2)
• Operating Room constrains The OP Room constrains should be taken into
account:
– Available space – Human-machine interface and ergonomy – Training of the medical staff – Interoperability with other equipements – Certification – Others
I.2 Specific issues (3)
• Sterility
Le robotic device should be compatible with the sterility procedures:
– The parts in contact with the patient should go into an
autoclave or should be disposable or could go through a chemical cleansing
– The other part in the sterile area should be wrapped in sterile bags in order to avoid contamination of the medical staff performing the surgical act
– Others
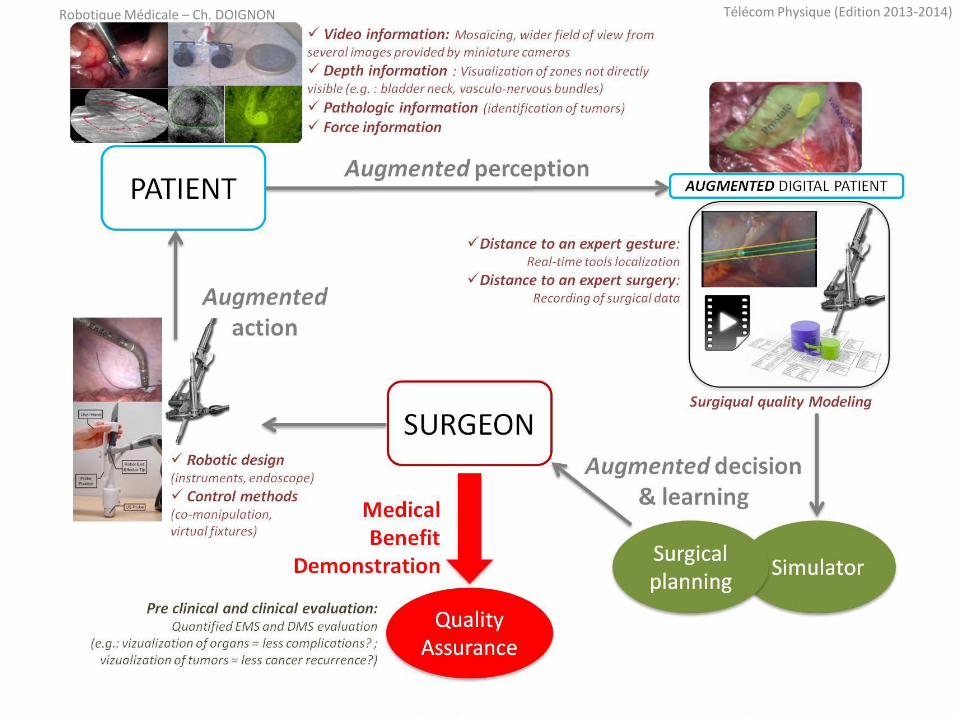
I.3 Succesfull medical assistance (1)
• Speed • Accuracy • Repeatability • Automatic registration with pre-operative data • Simulation • Force, velocity and positioning constrains • Augmented reality (visual, haptics, …) • Gravity compensation • Scaling of motions and forces • Telemanipulation • Automatic planned trajectory tracking • Hostile environment • Real-time integration of intra-operative data • Added dexterity • Tremor filtering • Recording of intra-operative data
Expected added-values of robotics and automation:
I.3 Succesfull medical assistance (2)
Conditions for success: • 3 specific issues are taken into account : safety, sterility
and OP room constrains • Several competitive advantages of robot over human are
realized • The doctor is in the loop • A significative improvement for the patient (validated
through clinical trials) • An advantageous trade-off between cost and benefit for
the patient
Technological success is different from medical or commercial success
Télécom Physique (Edition 2013-2014) Robotique Médicale – Ch. DOIGNON
6
Télécom Physique (Edition 2013-2014) Robotique Médicale – Ch. DOIGNON
7
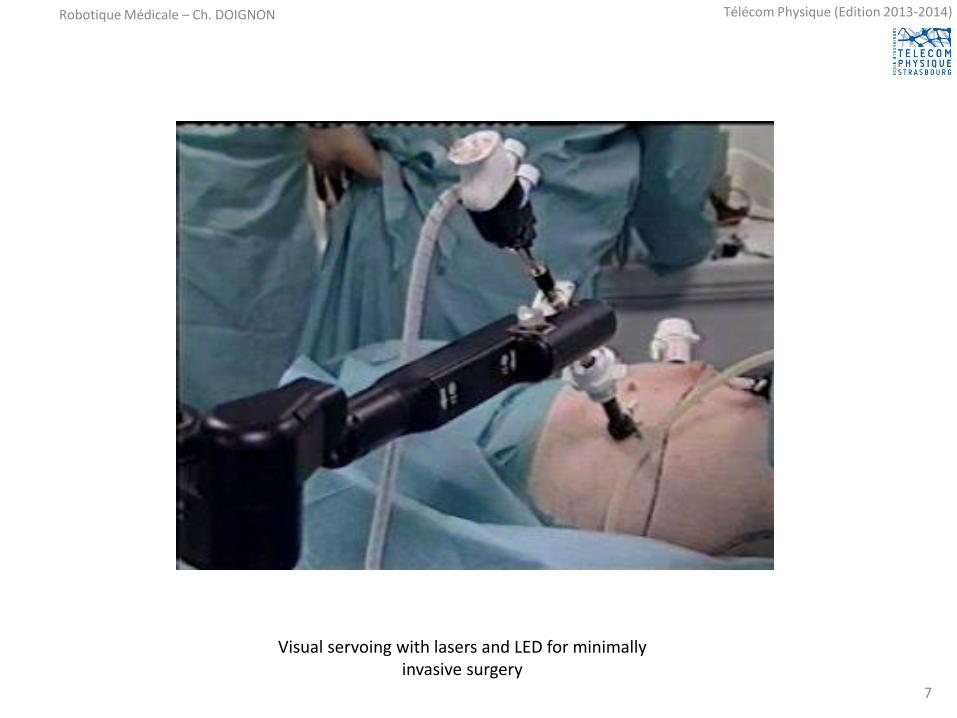
Visual servoing with lasers and LED for minimally invasive surgery