Embed Size (px)
Citation preview

Cours 05 - Compléments et Rappels sur la Modélisation des Liaisons Lycée Bellevue Toulouse - CPGE MP
Florestan MATHURIN Page 1 sur 8
(1) Voir cours 01 de
MPSI
(2) Voir cours 01 et 02
de MPSI
(5) Voir cours 09 et 22
de MPSI
(3) Voir cours 03 et 04
de MPSI
(4) Voir cours 31 de
MPSI
Compléments et Rappels sur la Modélisation des
Liaisons
Définition du besoin
et étude de faisabilité
Définition des
exigences
Conception de
l’architecture fonctionnelle
Conception de
l’architecture organique
Processus de réalisation
Fabrication - réutilisation -
achats
Réception
Assemblage
Validation du
Vérification de
l’intégration
Processus
d’intégration
Processus de
conception
Cahier des charges - Diagrammes fonctionnels SysML(1)
Schémas cinématiques / Schémas d’architecture(5)
Modèles CAO et plans
Illustration du processus de
conception dans le cadre du
pilote automatique
Exemple de système
PILOTE AUTOMATIQUE DE BATEAU
Diagrammes Structurels SysML(2)
+ Schémas blocs(3)
+ Modèles multiphysiques(4)
L’ingénieur doit constamment procéder à des choix lors des différentes étapes du processus
de conception afin d’obtenir les performances attendues par le cahier des charges. Cette
phase de conception passe nécessairement par l’optimisation de l’architecture des
constituants des systèmes et donc, dans ce cadre, un des problèmes essentiel de l’ingénieur
est de choisir les « meilleures » solutions technologiques pour réaliser les liaisons.

Cours 05 - Compléments et Rappels sur la Modélisation des Liaisons Lycée Bellevue Toulouse - CPGE MP
Florestan MATHURIN Page 2 sur 8
(6) La théorie des
mécanismes est un
outil préliminaire dans
le processus de
conception qui a pour
finalité de maitriser la
mobilité et
l’hyperstaticité d’un
mécanisme modélisé
par des liaisons
théoriques.
Pour définir puis valider ses choix de conception, l’ingénieur s’appuie systématiquement sur
des modèles plus ou moins détaillés, posés en fonction d’un objectif d’étude et validé par la
théorie des mécanismes(6)
.
1 - RAPPEL DE LA DEMARCHE DE MODELISATION
L’objectif de l’ingénieur est de comprendre, analyser, améliorer ou valider un mécanisme.
Pour cela, il le modélise pour appliquer ensuite les outils de la mécanique.
Comportement réel du système
Domaine Physique (réel)
Objectif d’étude
Comportement simulé du système
Domaine de simulation Validation
Outils de calcul adaptés
Modélisation
Modèle
Groupe hydraulique
Le choix du modèle dépend :
• de l’étude que l’on cherche
à mener,
• du degré de précision
demandé pour cette étude,
• des moyens de calcul
disponibles.
Le domaine de validité des lois
de la mécanique implique la
mise en place d’hypothèses
simplificatrices lors de la
phase de modélisation.
Plus le modèle est proche du système réel, plus les résultats obtenus seront satisfaisants.
2 - MODELISATION CINEMATIQUE ET STATIQUE DES LIAISONS
2.1. Modélisation cinématique des liaisons
Pour caractériser les mouvements relatifs entre deux solides (1) et (2) constituant une
liaison, on utilise l’outil torseur cinématique.
Dans une base ( z,y,xrrr
) donnée, il prend la forme générale : )z,y,x(
z
y
x
z
y
x
O
2/1
12
12
12
12
12
12
v
v
v
C
rrr
ΩΩΩ
=
On appelle NC le nombre de degré de liberté d’une liaison, il correspond au nombre de
paramètres de position relatifs indépendants. 0 ≤ NC ≤ 5
NC = 0 correspond à la liaison encastrement et l’existence même d’une liaison impose NC ≠ 6
puisqu’un solide sans liaison possède 6 degrés de liberté.
Deux hypothèses sont nécessaires à la mise en place du modèle cinématique d’une liaison.
Modèle Réel
Hypothèse 1 : géométrie parfaite
Modèle Réel
Hypothèse 2 : liaison sans jeu

Cours 05 - Compléments et Rappels sur la Modélisation des Liaisons Lycée Bellevue Toulouse - CPGE MP
Florestan MATHURIN Page 3 sur 8
2.2. Modélisation statique des liaisons
Pour caractériser l’action mécanique transmissible entre deux solides (1) et (2) constituant
une liaison, on utilise l’outil torseur d’action mécanique transmissible.
Dans une base ( z,y,xrrr
) donnée, il prend la forme générale : )z,y,x(12
12
12
12
12
12
O
21
N
M
L
Z
Y
X
F
rrr
=→
On appelle NS le nombre d’inconnues statiques d’une liaison, il correspond au nombre de
composantes non nulles et indépendantes. 1 ≤ NS ≤ 6
NS = 6 correspond à la liaison encastrement et l’existence d’une liaison impose NS ≠ 0
puisqu’un solide avec liaison possède au minimum 1 inconnue statique.
Deux hypothèses fondamentales supplémentaires sont nécessaires à la mise en place du
modèle d’action mécanique transmissible.
Hypothèse 3 : déformations nulles
Modèle (global) Réel
S1
S2 Zone de contact
(S)
zn12
rr=
x
S1
S2
Plan tangent (π)
O
21R → 21Fd →
r
Plan tangent
(π)
zn12
rr=
Point de contact
Hypothèse 4 : frottement négligé
Modèle (global) Réel
S1
S2 Zone de contact
(S)
zn12
rr=
x
S1
S2
Plan tangent (π)
O
21R → 21Fd →
r
Plan tangent
(π)
zn12
rr=
Point de contact
Lorsque les hypothèses 1, 2, 3 et 4 sont vérifiées, on dit que la liaison est parfaite :
• La puissance développée par les actions mécaniques de la liaison est nulle pour tout
mouvement compatible avec la liaison.
• Il y a une complémentarité entre le torseur cinématique et le torseur d’action mécanique
transmissible : NS + NC = 6
)z,y,x(
12y
12x
12zO
2/1
0
v
v
0
0
C
rrr
Ω=
A une vitesse angulaire nulle correspond un moment non nul pour le torseur d'action mécanique transmissible
)z,y,x(
12
12
12O
21
0
M
L
Z
0
0
F
rrr
=→
A une vitesse linéaire nulle correspond une force
Torseur
cinématique
O
(1)
(2)
zr
yr
xr
Torseur d'action
mécanique
transmissible

Cours 05 - Compléments et Rappels sur la Modélisation des Liaisons Lycée Bellevue Toulouse - CPGE MP
Florestan MATHURIN Page 4 sur 8
2.3. Cas particuliers concernant la modélisation du contact cylindre/cylindre et
plan/plan Suivant la longueur du contact cylindre/cylindre, le modèle à retenir peut changer :
d
L (1)
(2)
5,0d
L ≤ ou 5,1d
L5,0 ≤≤ + jeu important → Liaison linéaire
annulaire
5,1d
L ≥ ou 5,1d
L5,0 ≤≤ + jeu faible → Liaison pivot glissant
Ces bornes sont des valeurs moyennes, elles dépendent bien sur de l’ajustement du guidage. Le
choix de la modélisation dépend également de l’objectif d’étude….
Suivant les dimensions x et y de la surface plane (inclue dans une liaison de plus grande longueur
L), le modèle à retenir peut changer :
L
x y (1)
(2)
x ≈ y → Liaison appui plan
x ≈ 0,1.y ou y ≈ 0,1.x → Liaison linéaire rectiligne
x et y << L → Liaison contact ponctuel
Là encore ces bornes sont des valeurs indicatives, le choix de la modélisation dépend également
de l’objectif d’étude….
2.4. Dernières recommandations Il est essentiel de garder en mémoire qu’une liaison réelle n’est jamais parfaite puisqu’il s’agit
d’un modèle !
En réalité il ne faudrait pas dire « cette liaison est une liaison pivot glissant d’axe (O, xr
) » mais
plutôt « cette liaison peut être raisonnablement modélisée par une liaison pivot glissant parfaite
d’axe (O, xr
) compte tenu de l’objectif fixé ».
La modélisation par liaisons simples permet de définir et de calculer de façon relativement
simple les éléments de réduction des torseurs cinématiques et d’action mécanique transmissible.
Les liaisons simples constituent donc un modèle de référence utile et commode. Un des
objectifs du concepteur consiste donc à s’approcher au maximum de ces liaisons
simples !
3 - NECESSITE DE COMBINAISON DES LIAISONS - LIAISON EQUIVALENTE
3.1. Besoin Les liaisons simples ne permettent pas toujours à l’ingénieur de traduire un besoin cinématique
car deux problèmes apparaissent rapidement lorsque l’on se limite à l’utilisation des liaisons
simples définies précédemment :
• La notion de pression de contact dans une transmission d’efforts joue un rôle
prépondérant et impose le plus souvent des contacts surfaciques. Or, trois liaisons parmi
les liaisons simples font intervenir des surfaces de contacts infiniment petites (la liaison
ponctuelle, la liaison linéaire rectiligne et la liaison linéaire annulaire).

Cours 05 - Compléments et Rappels sur la Modélisation des Liaisons Lycée Bellevue Toulouse - CPGE MP
Florestan MATHURIN Page 5 sur 8
Pour palier ce problème, ces liaisons à forte mobilité peuvent être remplacées par des
liaisons surfaciques montées en séries dont la mobilité globale est la somme des mobilités
des liaisons surfaciques. → Dans ce cas, on parle de liaisons simples montées en série.
• Il n’existe pas de liaisons simples permettant une mobilité cinématique nulle ou égale à
1. Au minimum la mobilité cinématique est égale à 2 (liaison pivot glissant) alors que
c’est pourtant, dans un grand nombre de mécanismes, la majorité des liaisons
rencontrées (liaison pivot, liaison glissière, liaison encastrement) → Dans ce cas, on parle
de liaisons simples montées en parallèle.
3.2. Liaison équivalente - Définition La liaison équivalente correspond à la liaison théorique qui a le même comportement que
l’association des liaisons en série et/ou parallèle qu’elle remplace. Elle transmet la même action
mécanique et elle autorise le même mouvement que l’association de liaisons.
La liaison équivalente doit appartenir aux liaisons normalisées !!!
Il n'est pas toujours possible de trouver une liaison équivalente !!!
Besoin
Linéaire annulaire
d’axe (A, zr
)
A
zr
1
3
Réalisation technologique
Pivot glissant
d’axe (A, zr
)
1
2 3
A
zr
Rotule en A
Liaison équivalente
3
1
Besoin
Pivot d’axe (A, zr
)
A
zr
1
0
Réalisation technologique
zr
B
C
Linéaire annulaire d’axe (B, zr
)
1 0
Rotule en C
Exemple : Modélisation en liaisons séries et liaison équivalente d’un roulement à bille à rotule.
Exemple : Modélisation en liaisons parallèles et liaison équivalente d’un montage de roulement.
3.3. Recherche de la liaison équivalente dans le cas de liaisons séries On parle de liaison série si n liaisons sont
disposées en série en chaîne ouverte et si elles
sont disposées les unes à la suite des autres par
l’intermédiaire de n solides. Le but de l’étude
est de remplacer l’ensemble de ces liaisons
simples en série par une liaison
cinématiquement équivalente.
0 1 2 L1
i n L2
Li
Ln
0 Leq
n
Pour déterminer la liaison équivalente on doit traduire le fait que le mouvement équivalent
résulte de la composition des mouvements autorisés par chaque maillon de la chaîne ouverte.
On utilise donc l’outil torseur cinématique et pour trouver le torseur cinématique de la liaison
équivalente, on écrit que le torseur cinématique de la liaison équivalente est la somme des
torseurs cinématiques des liaisons en série.

Cours 05 - Compléments et Rappels sur la Modélisation des Liaisons Lycée Bellevue Toulouse - CPGE MP
Florestan MATHURIN Page 6 sur 8
Il est en effet
préférable sur ce
système de réaliser
une liaison ponctuelle
par mise en série
d'une liaison appui
plan et d'une liaison
rotule pour limiter la
pression de contact.
En passant d’un
contact ponctuel où la
pression est infinie à
un contact surfacique,
la pression devient
admissible pour les
matériaux.
Soit 0/nC le torseur cinématique de la liaison équivalente et 1n/nC − les torseurs
cinématiques des n liaisons en série alors : 0/11i/i1n/n0/n C...C...CC ++++= −−
Torseur cinématique de la liaison équivalente : ∑=
−=n
1i
1i/i0/n CC
Les torseurs doivent tous être écrits au même point si l’on veut les sommer !
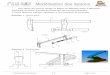
Réel Modèle
(schéma d’architecture)
4
5
6
0
5zr
A A
B
4 5 6 Appui plan de
normale (A, 5zr
)
Rotule en B
5z.lABr
=
Exemple : Recherche de la liaison équivalente entre le piston et l’arbre de la pompe hydraulique
)z,y,x(
y
x
zA
4/5
555
54
54
540
v
v
0
0
C
rrr
Ω= et
)z,y,x(
x
y
z
y
x
A)z,y,x(z
y
x
B
5/6
555
65
65
65
65
65
55565
65
65
0
.l
.l
0
0
0
C
rrrrrr
ΩΩ−
ΩΩΩ
=
ΩΩΩ
=
)z,y,x(
z
y
x
z
y
x
A
eq
555eq
eq
eq
eq
eq
eq
v
v
v
C
rrr
ΩΩΩ
= → 4/55/64/6eq CCCC +== d’où :
=Ω+=Ω−=Ω+Ω=Ω
Ω=ΩΩ=Ω
0v
.lvv
.lvv
eq
6554eq
6554eq
5465eq
65eq
65eq
z
xyy
yxx
zzz
yy
xx
)z,y,x(
xy
yx
zz
y
x
A
eq
555
6554
6554
5465
65
65
0
.lv
.lv
C
rrr
Ω+Ω−
Ω+ΩΩΩ
= soit une liaison ponctuelle en A de normale (A, 5zr
).
3.4. Recherche de la liaison équivalente dans le cas de liaisons parallèles
On parle de liaison parallèles entre deux pièces
(ou groupes de pièces) si le graphe des liaisons
présente deux ou plusieurs traits parallèles qui
relient ces deux pièces contiguës. Le but de
l’étude est de remplacer l’ensemble de ces
liaisons simples en parallèle par une liaison
cinématiquement équivalente.
1
2
L1
L2
Li
Ln
Leq
1 2

Cours 05 - Compléments et Rappels sur la Modélisation des Liaisons Lycée Bellevue Toulouse - CPGE MP
Florestan MATHURIN Page 7 sur 8
(7) La théorie des
mécanismes n’est
désormais plus au
programme de MP et
sera exclusivement
abordée en école
d’ingénieur. Ce
chapitre est donc
uniquement pour la
culture personnelle.
Pour déterminer la liaison équivalente on doit traduire le fait que la liaison équivalente transmet
une action mécanique égale à la somme des actions mécaniques transmises par chacune des
liaisons en parallèle. On utilise donc l’outil torseur des actions mécaniques transmissibles et pour
trouver le torseur statique de la liaison équivalente, on écrit que le torseur statique de la liaison
équivalente est égal à la somme des torseurs statiques des liaisons en parallèle.
Soit eq21F → le torseur d’AM transmissibles de la liaison équivalente et Ln
21F → les torseurs d’AM
transmissibles des n liaisons en parallèles alors : Ln21
Li21
2L21
1L21
eq21 F...F...FFF →→→→→ +++++= .
Torseur d’actions mécaniques transmissibles de la liaison équivalente : ∑=
→→ =n
1i
Li21
eq21 FF
Les torseurs doivent tous être écrits au même point si l’on veut les sommer !
Réel
zr
B
C
Linéaire annulaire d’axe (B, zr
)
1
0
Rotule en C
Modèle Recherche de la liaison équivalente pour le cas du montage de roulements de l’arbre moteur de la
pompe
)z,y,x(
LA01
LA01
B
LA10
0
0
0
0
Y
X
F
rrr
=→ et )z,y,x(
ROT01
ROT01
ROT01
C
ROT10
0
0
0
Z
Y
X
F
rrr
=→ → z.lBCr
= → )z,y,x(
ROT01
ROT01
ROT01
ROT01
ROT01
B
ROT10
0
X.l
Y.l
Z
Y
X
F
rrr
−=→
On pose : )z,y,x(
eq01
eq01
eq01
eq01
eq01
eq01
B
eq10
N
M
L
Z
Y
X
F
rrr
=→ et ROT10
LA10
eq10 FFF →→→ += d’où :
==−=
=+=+=
0N
X.lM
Y.lL
ZZ
YYY
XXX
eq01
ROT01
eq01
ROT01
eq01
ROT01
eq01
ROT01
LA01
eq01
ROT01
LA01
eq01
→ )z,y,x(
ROT01
ROT01
ROT01
ROT01
LA01
ROT01
LA01
B
eq10
0
X.l
Y.l
Z
YY
XX
F
rrr
−++
=→ soit une liaison pivot d’axe (O, zr
).
4 - INTRODUCTION AU CONCEPT DE LA THEORIE DES MECANISMES (7)
La théorie des mécanismes traite uniquement de modèles pour lesquels on considère qu’il n’y a
que des liaisons avec des géométries parfaites, sans jeux, ni frottement, ni déformations et qui
sont définis chacune par un torseur cinématique (le torseur d’action mécanique transmissible en
découlant automatiquement). Par conséquent la théorie des mécanismes s’appuie sur des
modèles architecturaux liés à des objectifs d’étude et a pour but de maitriser la mobilité et
l’hyperstaticité d’un modèles de mécanismes modélisés par des liaisons théoriques.

Cours 05 - Compléments et Rappels sur la Modélisation des Liaisons Lycée Bellevue Toulouse - CPGE MP
Florestan MATHURIN Page 8 sur 8
(8) Par conséquent
tous les modèles
posés au concours
pour la résolution de
problèmes de statique
ou de dynamique
seront isostatiques.
Notion d’hyperstaticité (ou hyperstatisme) d’un modèle L’hyperstaticité d’un modèle de système mécanique est donnée par le nombre d’inconnues de
liaison qui n’ont pas pu être déterminées par les seules équations issues du principe fondamental
de la statique. Dans ce cas, on peut dire qu’il y a un excès de liaisons mécaniques sur le modèle
du système. Un modèle de mécanisme est dit isostatique si l’on peut calculer, après
modélisation des liaisons et par les seules équations de la statique, toutes les composantes des
actions mécaniques intervenant dans les liaisons du système.
Pourquoi calculer un degré d’hyperstaticité ?
• Pour déterminer les actions mécaniques transmissibles des liaisons avec les seules
équations issues des théorèmes généraux, il est préférable d’identifier si le modèle du
système est isostatique (et donc de savoir si cette détermination est possible) avant de
se lancer dans des calculs parfois longs et fastidieux(8)
.
• La mise en évidence des liaisons surabondantes conduisant au degré d’hyperstaticité
aboutit à la mise en place de tolérances géométriques nécessaires à la définition
fonctionnelle des pièces.
Quel est la validité d’un degré d’hyperstaticité ?
Le calcul du degré d’hyperstaticité dépend de la modélisation choisie pour chacune des liaisons.
• Si l’objectif de l’ingénieur est de calculer les composantes d’actions mécaniques
transmissibles des liaisons, il s’orientera vers une modélisation « minimale » conduisant
à un degré d’hyperstaticité le plus faible possible.
• Si son objectif est la mise en place de spécifications fonctionnelles, il s’orientera à
l’inverse vers un degré d’hyperstatisme plus grand.
Réel
Modèles (schémas d’architecture)
Modèle 2
Modèle 1
Pour définir les tolérances géométriques nécessaires à la définition fonctionnelle de l’arbre, on
s’oriente vers une modélisation avec un degré d’hyperstaticité élevé. Compte tenu de ces choix
technologiques, on peut donc modéliser le comportement de chacun des roulements par une
liaison linéaire annuaire et une liaison pivot (modèle 1). Une étude rapide (liaisons parallèles)
permettrait de voir que cette modélisation possède un degré d’hyperstaticité de 2, ce qui
implique d’avoir une excellente coaxialité entre les différentes portées de roulement.
Dans le cadre d’un calcul de prédimensionnement des roulements ou bien d’un calcul de l’arbre
en résistance des matériaux, on a besoin de connaitre rapidement les torseurs d’action
mécaniques transmissibles, on s’oriente donc vers une modélisation isostatique (modèle 2).
Un exemple simple