Embed Size (px)
Citation preview
1
Mme ELOFIR Silvana, Enseignante certifiée en sciences physiques, M. MOUSSI Ouissem, Enseignant certifié de technologie, Collège Colette Rue Colette 69800 Saint-Priest
Compte rendu et bilan de notre participation à la 14 ème édition de :
30 Avril au 04 mai 2014 Albuquerque, New Mexico
USA
Les partenaires de ce projet :
2
REMERCIEMENTS
Tout d’abord nous tenons à remercier notre équipe de direction pour son soutien sur ce projet :
Mme Morand-Morel Fabienne, principale du collège Colette 2013-2014; M. Calmant régis, principal adjoint ; Mme Sennavoine Sidonie – Gestionnaire.
Merci également à notre partenaire le CIRASTI avec qui nous travaillons étroitement au développement du partenariat France / USA dans le cadre du projet Exposcience numérique :
M. BABAKWANZA Babo, chargé de projet au sein du CIRASTI M. GIRODON Jean-Claude, président du Cirasti
Merci également à nos partenaires et amis américains de l’organisation RoboRave International pour nous avoir permis de participer à cette 14ème édition Internationale de RoboRave : Russ Fisher-Ives, director of Global Programs for RoboRAVE International; Brian Montoya, former science teacher RoboRAVE coach and playshop; Pam Feather, Formerly a high school teacher, Director K-12 Robotics Education; Fabian Lopez, Professor of Robotics and Electronics, Co-Founder of RoboRAVE. __________________________________________________
Contenu du rapport
Remerciements ........................................................................................... Page 2 Découverte de la ville d’Albuquerque ........................................................ page 3 Objectifs de notre participation.................................................................. Page 4 Présentations des 6 challenges RoboRave 2014.......................................... Pages 5-6 Compte rendu des 4 conférences ............................................................... Pages 7-14 Bilan – Conclusion ...................................................................................... Page 15

3
La ville d’Albuquerque – Nouveau Mexique – ETATS UNIS
Objectifs de notre participation Le but de notre séjour était de découvrir la ROBORAVE et les challenges mis en œuvre pour les élèves. Nous avons pu rencontrer différents partenaires, comprendre les challenges mis en œuvre (visite du salon) et découvrir (en les réalisant par nous-même) le travail à réaliser avec les élèves en vue d’une future participation. Notre formation s’est déroulée en deux temps. Membres de la Robotic Academy, nous avons fabriqué des robots puis nous les avons programmés. Nous étions soutenus par une équipe de « facilitator » qui nous a suivis dans tous nos montages et programmations. Enfin, nous les avons testés, en combattant d’autres robots, dans les combats de joute par exemple.
Albuquerque est la plus grande ville du Nouveau-Mexique, aux États-Unis, à 523 km au sud-ouest de Denver (Colorado). C’est le siège et la ville principale du comté de Bernalillo.
En 2010, Albuquerque compte 545 852 habitants, ce qui en fait de loin la ville la plus peuplée de l’État. L'agglomération compte quant à elle 887 077 habitants en 2010.
On trouve à Albuquerque l'université du Nouveau-Mexique, la base aérienne de Kirtland et l'un des deux laboratoires Sandia.
Et la ROBORAVE :

4
Nous avons repéré les lieux, Albuquerque capitale du Nouveau Mexique (USA), et itinéraires de déplacements (vol avec escales depuis Paris) en vue d’une éventuelle participation avec nos élèves. Nous avons été conseillés par des professionnels d’autres pays qui travaillent déjà avec leurs élèves sur ce projet afin de connaître leurs ressentis et la manière d’aborder au mieux la robotique avec un jeune public. Enfin, nous avons pu élaborer un projet pédagogique du futur projet Robotique qui sera proposé aux élèves de deux classes de quatrièmes du Collège Colette de Saint-Priest pour la rentrée 2014-2015.
5
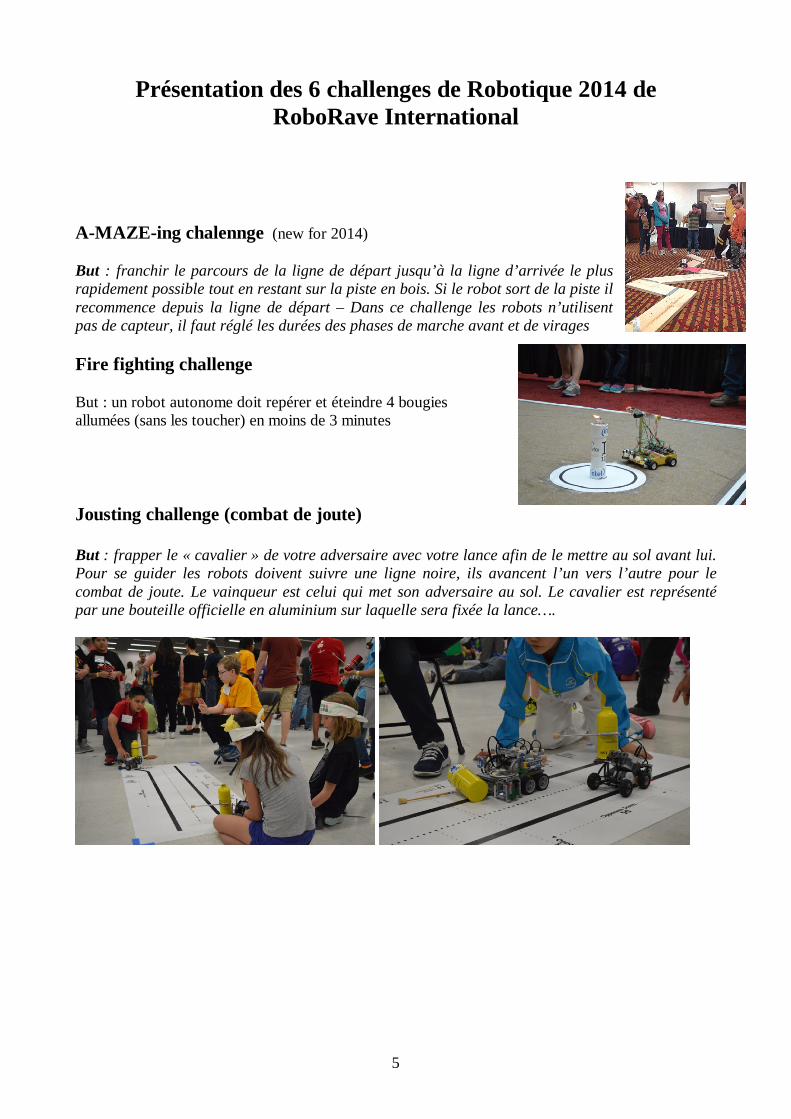
Présentation des 6 challenges de Robotique 2014 de RoboRave International
A-MAZE-ing chalennge (new for 2014) But : franchir le parcours de la ligne de départ jusqu’à la ligne d’arrivée le plus rapidement possible tout en restant sur la piste en bois. Si le robot sort de la piste il recommence depuis la ligne de départ – Dans ce challenge les robots n’utilisent pas de capteur, il faut réglé les durées des phases de marche avant et de virages Fire fighting challenge But : un robot autonome doit repérer et éteindre 4 bougies allumées (sans les toucher) en moins de 3 minutes Jousting challenge (combat de joute) But : frapper le « cavalier » de votre adversaire avec votre lance afin de le mettre au sol avant lui. Pour se guider les robots doivent suivre une ligne noire, ils avancent l’un vers l’autre pour le combat de joute. Le vainqueur est celui qui met son adversaire au sol. Le cavalier est représenté par une bouteille officielle en aluminium sur laquelle sera fixée la lance….

6
Line following challenge But : Le robot suiveur de ligne doit être programmé afin de se déplacer de la ligne de départ jusqu’à la tour (boîte en carton), verser un maximum de balles de ping pong dans la boîte, et retourner au départ toujours en suivant la ligne noire. Le robot doit verser un maximum de balles dans le boîte en moins de 3 minutes. Chaque balle rapporte 1 point, l’équipe qui l’emporte est celle qui aura obtenu le meilleur score. Robotovate challenge But : mettre en avant et faire la promotion de votre robot autonome ou télécommandé ou système mécanique participant à une des six catégories du 13 ème concours RoboRave International.
Afin de faire partie des 15 robots participants à ce challenge, les concurrents doivent faire la promotion de leur invention auprès des visiteurs de leur « stand » afin de bénéficier de leur vote. Les visiteurs élisent les 15 robots participants, un jury officiel déterminera le robot le plus innovant.
Triathlon challenge (new for 2014)
But : participer à 3 challenges (a-MAZE-ing, Jousting, et Line Follow challenges) différents avec le même Robot afin de cumuler un maximum de points

7
Compte rendu des 4 conférences sur le thème de la Robotique
1 mai 2014 : Conférence 1 :
Dr . Philip D. Heerman, Ph. D., Senior Manager, Sandia National Laboratories Senior Manager of the Intellignet Systems, Robotics and Cybernetics (ISRC) Group at Sandia National Laboratories. Responsable de la recherche sur les systèmes automatisés, robotiques et la « Cyber communication » au sein du laboratoire national de recherche Sandia (groupe ISRC) … Présentation des travaux de recherche et développement d’une interface graphique interactive pour la simulation et la recherche dans le domaine de l’armement.
Recherche fondamentale en énergie solaire, intelligence artificielle et systèmes de commande non- linéaires (Robot autonomes capables de déclencher de multiples actions en fonction du milieu environnant – capable de prendre des initiatives après l’analyse du contexte et du milieu environnant…)
Environnement graphique interactif (tactile) relié à des super-ordinateurs ….

8
L’enseignement de la robotique prend racine et s’appuie solidement sur les domaines de compétences que sont la Science, la Technologie, les mathématiques et l’Ingénierie (conception).
Même si ces deux domaines vont souvent de paire il existe cependant des différences fondamentales entre l’Informatique et la Robotique :
En bref : L’enseignement de la Robotique est parfaitement adapté à la mise en place d’un travail pluridisciplinaire et complémentaire. Cet enseignement prend racine dans les quatre domaines principaux que sont Les Sciences – la technologie – la conception – les mathématiques.

9
1 mai 2014: Conférence 2: Dr. Gil R. Gallegos, Ph. D., Assistant professor CS/Engineering, New Mexico Highlands University, Las Vegas. Centre d’intérêt professionnel : Computer vision, Non linear control theory, robotics, real time control systems, Scientific Vizualisation and Interactive Art .... Thème de la conférence : l’usage de l’informatique au service de la robotique et des systèmes graphiques interactifs ….
1- Différents langages de programmation ? 2- Précisions et performances de certains capteurs ? 3- Quels cursus universitaires sont proposés à l’université de Nouveau Mexique ? 4- Quels sont les coûts des matériels et logiciels nécessaires ?
________________________________________________________
1- Différents langages de programmation ? Il existe aujourd’hui un nombre important de langages de programmation en fonction des besoins et du niveau de complexité des applications :
2- Précisions et performances de certains capteurs ?
Associés à ces langages de programmation il est possible de disposer de capteurs de plus en plus précis et pour un coût réduit « bon marché » : - Capteur de distance : « Lidar-Lite » Vous avez besoin d’un capteur de distance pour un projet ? Jusqu’à présent vous aviez deux options : un capteur à ultrason peu cher mais à la performance limitée ou de coûteux capteurs lasers comme le Lidar. Voici maintenant Lidar-lite , qui utilise une simple Led comme laser, détecte des objets à 40 mètres avec une réelle précision, une faible consommation en énergie, un coût réduit…)
Lidar-Lite

10
- Capteur de mouvement : « Leap Motion » (interface homme/machine tridimensionnelle) Le Leap Motion est une nouvelle interface de contrôle qui permet d’interagir avec un ordinateur à l’aide des mouvements des mains et des doigts. Il suffit pour cela de le brancher par USB. Le gros plus par rapport aux classiques souris ou écrans tactiles, c’est qu’il est capable de repérer nos mouvements dans l’espace et permet donc un contrôle en 3 dimensions. À la frontière entre un contrôle tablette et un contrôle par la Kinect, le Leap Motion se veut à la fois plus précis et plus sensible (résolution 1/100mm).
Le boîtier projette au dessus de lui une lumière infrarouge dans un cube d’environ 60cm qui lui permet de détecter les obstacles, vos mains et de reconstruire l’environnement 3D qui le compose. (compléments / source : http://naturalpad.fr/leap-motion/ )
- caméra à Infra Rouge (capteur de mouvement) : « Kinect » Il s’agit d’une camera utilisant des techniques d’interaction , périphérique destiné par ailleurs à la console de jeux vidéo Xbox 360 permettant de contrôler des jeux vidéo sans utiliser de manette et aussi à Microsoft Windows depuis septembre 2008…. 3- Quels cursus universitaires sont proposés à l’université de Nouveau Mexique ?

11
- Lidar-Lite - Leap Motion - Kinect - Digilent Nexys 2 ( FPGA Design), $120 - Rasberry PI (credit card Size Full 32 bit Compuuting Platforme) $ 39 - Beaglebone Black (credit card Size Full 32 bit Computing Platforme) $ 45 - Robotic Operating System (ROS) Open Source, Free - Linux Operating System (Ubuntu 12.04.3 LTS ARM and Intel) Open Source, Free - Freemat/Octave (Matlab for Free Multi-platform) Open Source, Free - Quite Universal Circuit Simulator (QUCS) Open Source, Free - AR Parrot Drone UAS $370 Total $847 (moins de $1000)
4- Quels sont les coûts des matériels et logiciels nécessaires ?
En bref : Il est possible et abordable d’utiliser l’outil informatique pour la programmation, la réalisation d’interfaces graphiques (dynamique / systèmes asservis) pour un coup relativement modeste tant au niveau des logiciels que des composants matériels. Il est ainsi possible de commencer très tôt dans les cursus scolaires des projets à la fois simples « techniquement » et trèscomplets… Internet (Logiciels libres – communauté d’Internautes) met à disposition un environnement de ressources et d’aides techniques et scientifiques , permettant d’affronter sereinement le degré de difficulté proposé et de réussir à atteindre les objectifs des projets….

12
2 mai 2014: conférence 3 Dr. Don Davis, Ph. D., University of New Mexico-Los Alamos, Chair Applied Technologies Don Davis is a National Presidential Awardee for Excellence in Science and Mathematics Teaching. He has also been awarded an Environmental Education teaching award, and is one of only 20 teachers nationwide, to be featured in the American Association for the Advancement of Science book "Exploring the Place of Exemplary Science Teaching". Don was also selected as the 2012 Los Alamos Public Schools Teacher of the Year. Thème de la conférence : Proposer des projets et concours de robotique aux élèves Voici quelques exemples de projets de conception et fabrication de Robot dans le cadre d’un projet ou en vue de participer à un concours de Robotique … Les élèves vont dans un premier concevoir et fabriquer leur robot. Il faudra ensuite rapidement tester le robot afin de vérifier si les choix de conception permettent réaliser le fonctionnement attendu ou de relever le défi proposé. L’intérêt du travail réside ici dans la démarche de résolution de problème technique au niveau des choix de conception sur le robot et au niveau de la programmation de son fonctionnement
Combat de deux robots Sumo (Sumo-bot challenge)
Combat de trois robots Sumo (Sumo-bot Triple)
En général les premiers tests ne sont pas concluants, il faudra procéder à des recherches de solutions et modifier le robot jusqu’à relever le défi…

13
Défi Robotique : franchir une pente à 45 ° dans les deux sens
Défi Robotique : Robot sauveteur Tout terrain (franchir des obstacles de tous types) (All-Terrain Rescue Bot challenge)
En bref : il est possible d’amener les élèves à concevoir et fabriquer des robots avec des objectifs très précis : robots sumo (combat), robots franchissant des pentes de 45°(en descente et en montée), robots sauveteurs (franchissant des obstacles de tous types),… Il faudra intégrer une phase de conception et de fabrication suivie d’une démarche de résolution des problèmes, en passant par la résolution de problèmes de programmation, afin d’atteindre les objectifs de fonctionnement du robot. Ces objectifs répondants au cahier des charges fixé initialement.

14
2 mai 2014 : conférence 4 Dr. Kevin Wedeward, New Mexico Tech University, chair EE Dept. Ph. D., New Mexico Institute of Mining and Technology Thème de la conférence : projets liés à l’utilisation des robots dans un environnement dangereux en respectant les règles de sécurités électriques.
Par exemple, un projet serait de fabriquer des robots fonctionnant à l’énergie solaire, avec des pneus épais et résistants. Ces robots fonctionneraient dans des conditions extrêmes. Le but est d'identifier le travail à réaliser puis de prévoir les différentes étapes de conception : l’apprentissage reste axé sur la robotique. Il faudra privilégier un travail d'équipe, être créatif et répondre à un certain design pour la fabrication du robot. Ensuite, le travail à réaliser doit être présenté et il faudra rédiger un cahier des charges. Les différentes matières utilisées et mises en œuvre sont la programmation, les sciences, les mathématiques et l’électronique. Différents défis ont été organisés : challenge de Basket Ball, voiture fonctionnant à l’énergie solaire, robots utilisant des pneus avec roues de traction performantes…
En bref : la robotique et son utilisation constituent des moyens d’amener les élèves à mettre en œuvre différentes matières (programmation, sciences, mathématiques et électronique). Ceci peut s’apparenter à une gestion des tâches complexes. On notera ici l’importance du partage des tâches entre les différents membres de l’équipe de projet afin de faciliter la résolution de problèmes techniques. De plus, les contraintes liées à l’environnement dangereux obligent les élèves à adopter des méthodes de travail rigoureuses et à respecter des règles de sécurité.

15
BILAN - CONCLUSION
La robotique pédagogique pour la motivation et la persévérance scolaire au secondaire a pour objectif de faire vivre aux élèves une série d’activités et défis reliés aux technologies robotiques comme moyen de transfert des apprentissages.
Elle s’adresse tout particulièrement aux élèves ayant des difficultés ou des retards scolaires.
Elle permet d’aider au développement de leurs compétences et de leurs connaissances dans les domaines disciplinaires des mathématiques, de la Science Physique et de la Technologie . Elle vise à augmenter la motivation scolaire et l’estime de soi des élèves ainsi qu’à diminuer le taux d’absentéisme à l’école. Les élèves, selon leur niveau scolaire, seront en mesure de construire des modèles de robots de plus en plus complexes à partir de plans et de gammes de fabrication, ils seront par la suite initiés à la programmation robotique par le biais de logiciels adaptés au niveau des élèves : - LEGO MINDSTORMS NXT , (découverte niveaux 6°/ 5° / 4° ) - ARDUINO (programmation graphique par blocks avec « Ardublock » ; initiation au langage C en modifiant ou complétant des programmes existants – 4° / 3°) - Langage Organigramme (avec Picaxe Programming Editor – 4° /3° ) . Ces thématiques de travail sont en parfaite cohésion avec les poursuites d’études au lycée. Les contenus seront retravaillés, enrichis et complétés avec des applications comme la « réalité virtuelle augmenté » ou la conception et réalisation de systèmes automatisés programmés….(Lycée Condorcet, Saint-Priest, projets de bac STI2D). Par ailleurs nous réfléchissons actuellement à la mise en place d’un convention avec le Lycée Condorcet (lycée de secteur de Saint-Priest) afin de travailler ensemble pour une meilleure continuité et transition Collège/Lycée dans le domaine scientifique : Sciences-Physiques -Technologie en collège et la filière STI2D au lycée Condorcet). Cette convention permettra par exemple l’utilisation de certains équipements du lycée (imprimante 3D etc… pour le prototypage des pièces ou le prêt de matériel au collège ainsi qu’un travail en partenariat entre élèves de collège / lycée….. ) .