Embed Size (px)
Citation preview

• 1
Control en temps réel des véhicules
électriques et photovoltaïques dans le
réseau de base tension
NGUYEN Van Linh
05 Février 2015

page 2/49
Plan
Contexte et objectif
Contribution des systèmes PV et
VE aux services système 1
Gestion optimale de recharge
des VE 2
Contrôle en temps réel des
systèmes PV et VE 3
Conclusions et perspectives 4

page 3/49
Contribution des systèmes PV et VE aux services système
Objectifs
Nécessité de développer les fonctions supplémentaires pour que
- Onduleurs PV devient plus intelligent (flexible, facile à intégrer…)
- Onduleurs PV participent aux services système
- Coût soit raisonnable
Services système
Régulation de la tension du
réseau

page 4/49
Participation à la régulation de tension
Tension efficace
Vmin admissible Vmax admissible
0.90 pu (-10%) (207V) 1.1 pu (+10%) (253V)
Insertion massive de PV ou VE
Variation du plan de tension
Utiliser PV pour
compenser Q
Participer à réguler la tension
Vmin admissible
Vmax admissible
Q
Norme NF
EN 50160
𝐐𝐦𝐚𝐱,𝐦𝐢𝐧 = ± 𝐒𝐧𝟐 − 𝐏𝟐
sans PV
avec PV
PV reg

page 5/49
Principe de la régulation de tension par PV
Onduleur
MLIContrôle de
l’onduleur
RéseauPconsigne
Calcul Q
Vmax admissible
Vmin admissible
I,Vmesure
Qmesure
(pu)fuzzification inference Defuzzifiction
Vmesure
(pu)
C
∫V admissible
xQ
Calcul Q par la
logique floue
Qconsigne

page 6/49
Réseau BT rural
A
B
C
a
b
c
n2
Transfo 20/0.4
N
A
B
C
Three-Phase Source
+++
+
+
Qmod
a
n
PV_8
Qmod
a
n
PV_7
a
n
PV_6
Qmod
a
n
PV_5
Qmod
a
n
PV_4
Qmod
a
n
PV_3
Qmod
a
b
c
n
PV_2
Qmod
a
b
c
n
PV_1
a
n
PQ_2
a
n
PQ_14
a
n
PQ_13
a
n
PQ_12
a
n
PQ_11
a
n
PQ_10
a
n
PQ_07
a
n
PQ_06
ABC
abc
N_17
ABC
abc
N_16ABC
abc
N_15
ABC
abc
N_14
ABC
abc
N_13
ABC
abc
N_12
ABC
abc
N_11ABC
abc
N_10ABC
abc
N_09ABC
abc
N_08
ABC
abc
N_07
ABC
abc
N_06
ABC
abc
N_05ABC
abc
N_04ABC
abc
N_03ABC
abc
N_02
ABC
abc
N_01
Ina
Inb
Inc
Inn
Outa
Outb
Outc
Outn
L_15
Ina
Inb
Inc
Inn
Outa
Outb
Outc
Outn
L_14
Ina
Inb
Inc
Inn
Outa
Outb
Outc
Outn
L_13
Ina
Inb
Inc
Inn
Outa
Outb
Outc
Outn
L_12
Ina
Inb
Inc
Inn
Outa
Outb
Outc
Outn
L_11
Ina
Inb
Inc
Inn
Outa
Outb
Outc
Outn
L_10
Ina
Inb
Inc
Inn
Outa
Outb
Outc
Outn
L_09
Ina
Inb
Inc
Inn
Outa
Outb
Outc
Outn
L_08
Ina
Inb
Inc
Inn
Outa
Outb
Outc
Outn
L_07
Ina
Inb
Inc
Inn
Outa
Outb
Outc
Outn
L_06
Ina
Inb
Inc
Inn
Outa
Outb
Outc
Outn
L_05
Ina
Inb
Inc
Inn
Outa
Outb
Outc
Outn
L_04
Ina
Inb
Inc
Inn
Outa
Outb
Outc
Outn
L_03
Ina
Inb
Inc
Inn
Outa
Outb
Outc
Outn
L_02
Ina
Inb
Inc
Inn
Outa
Outb
Outc
Outn
L_01
8Outn
7Inn
6Inc
5Inb
4Ina
3Outc
2Outb
1Outa
+
+Line_n15
+Line_15c
+Line_15b
+Line_15a
Une section
de la ligne
PV
PV
PV
PV
PV
PV

page 7/49
Résultat de la régulation de tension
Avec le nouveau contrôle
Puissance réactive générée par les PV
Tension des nœuds
Tension de tous les
nœuds est ramenée dans
les limites admissibles
0 5 10 15 20 25 0.85
0.9
0.95
1
1.05
1.1
V (
pu
)
0 5 10 15 20 25 0.85
0.9
0.95
1
1.05
1.1
Time (H)
V (
pu
) 0 5 10 15 20 25 -15
-10
-5
0
5
Temps (H)
Q (
kV
ar)
N 04 N 05 N 06 N 07 N 11 N 12 N 13 N 14
Dépasse la limite admissible

page 8/49
Plan
Contexte et objectif
Contribution des systèmes PV et
VE aux services système 1
Gestion optimale de recharge
des VE 2
Contrôle en temps réel des
systèmes PV et VE 3
Conclusions et perspectives 4

page 9/49
Gestion optimale de recharge des VE
Transformateur
Ligne
Réseau
Borne de
recharge
Développement des stratégies de gestion optimale de recharge
des VE en parking
Minimiser la puissance appelée
du réseau
Minimiser le coût de recharge
Favoriser autoconsommation,
utiliser PV pour charger les VE
En différents cas
Interruption de recharge (On/off)
Modulation de recharge
Demande du gestionnaire du
réseau (DSO)
Tstop
t
(h)
Puissance
(kW)
6
12
Tstart
7 19Tstop
VE4
6
12
Tstart
7 19
VE3
VE2VE1
VE6
VE5
VE2 VE4
VE5
18
VE1
VE2
VE3
VE4
VE5
VE6
t
(h)
(a) (b)
Puissance
(kW)

page 10/49
Optimisation
congestion
On/off
modulée
Couplage avec PV
Coût de charge
On/off
modulé
Couplage avec PV
Gestion optimale de recharge des VE
Hypothèse
Utilisation du modèle simplifié du VE
Prévision du PV
Gestionnaire du parking peut avoir les
donnés des VE: SOC, capacité de la
batterie, Tarrrivée, Tdépart…

page 11/49
Minimiser le congestion et maximiser l’utilisation de l’énergie solaire
Interruption de recharge Programmation binaire
Modulation de recharge Programmation linéaire
INITIATION
Tstart,Tstop
bM = Pcharge.NEV
bm = 0; b = 0
Programmation
binaire ou linéaire
solution ?
bm = b
faux
vrai
bM=b
faux
vrai
b =bM+bm
2
FIN
sortie variable Xi
et b
(bM-bm) £ ε
+ PPV
Prévision
du PV
Fonction
objectif
Contrainte
SOC = 100% pour tous les VE au départ
Temps arrivée et départ aléatoire
Respecter la limite de puissance imposée
par DSO
Variable: Xit
Méthode dichotomie
𝐙 = 𝐦𝐢𝐧 𝐗𝐢𝐭
𝐍𝐓
𝐭=𝟏
𝐍𝐕𝐄
𝐢=𝟏

page 12/49
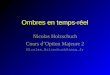
Résultat d’optimisation,
Nombre de VE : 20; Pcharge =3kW
SOC initial varie entre 10% à 90%
Plan de charge des VE
(on-off)
Puissance de recharge du parking
Tarrivée aléatoire entre 7 à 9h
Tdépart aléatoire entre 17 à 19h,
8 10 12 14 16 18 0
10
20
30
40
50
60
Temps (h)
Pto
tal (k
W)
Sans contrainte DSO
sans optim
Avec contrainte DSO
8 10 12 14 16 18
2
4
6
8
10
12
14
16
18
20
VE
cas sans PV

page 13/49
Résultat d’optimisation,
Cas EPV<EVE
cas avec PV
8 10 12 14 16 18 -10
0
10
20
30
40
50
60
time (h)
P (
kW
)
avec optim
sans optim
PV
Grid avec optim
8 10 12 14 16 18 -30
-20
-10
0
10
20
30
40
50
60
P (
kW
)
avec optim
sans optim
PV
Grid sans opt
Grid
Cas EPV=EVE
Péchange ≈ 0 Soutirer la puissance
de réseau

page 14/49
Gestion optimale de recharge des VE
Hypothèse
Utilisation du modèle simplifié du VE
Prévision du PV
Gestionnaire du parking peut avoir les
donnés des VE: SOC, capacité de la
batterie, Tarrrivée, Tdépart…
Optimisation
congestion
On/off
modulée
Couplage avec PV
Coût de charge
On/off
modulé
Couplage avec PV

page 15/49
Minimiser le coût de recharge des VE
Fonction
objectif
Update SOC0,Tdeb,
Tstart, Tstop, EPV, EVE
TDSO, PDSO
Programmation
binaire ou linéaire
FIN
sortie Xi et coût
INITIAL
prévision Ct, PV
EPV > EVEs
faux
vrai
Contrainte
(4)-(6)
Contrainte
(7)-(10)
Nouveau VE,
PDSO?
vrai faux
𝐙 = 𝐦𝐢𝐧 𝐂𝐭 (𝐏𝐕𝐄𝐢𝐗𝐢𝐭)
𝐍𝐕𝐄
𝐢=𝟏
𝐍𝐓
𝐭=𝟏
Contraintes
Minimiser l’écart de la puissance du PV et
la puissance des totales des VE
SOC = 100% pour tous les VE au départ
Respecter la limite de puissance imposée
par DSO
Variable: Xit

page 16/49
Aléatoire 20, prix d’électricité sur une semaine 06/05-12/05/2013, CPV = 0.13 euros/kWh
sans opt avec opt % réduction
Total 155,68 112,09 28
Puissance de recharge du parking avec DSO
Coût d’énergie sans et avec gestion de recharge
8 10 12 14 16 18 0
20
40
60
Pto
tale
(kW
)
8 10 12 14 16 18 0.04
0.06
0.08
0.1
Prix (
Eu
ros/k
WH
)
Prix avec optim sans optim
Temps (h)
50
Mercredi Jeudi Samedi
sans optim (euros)
avec optim(euros)
Mardi Vendredi Dimanche Lundi
30
10
0
20
40
Co
ût
(Eu
ros)
Résultat d’optimisation, cas sans PV

page 17/49
Puissance du parking
Cas Cas 1
PPV max (kW)
70
Limit PDSO
(kW) 60
Coût (Euros) Cas 1
Sans gestion 37.19
Gestion sans DSO
12.25
Gestion avec DSO
12.85
Puissance échange avec le réseau
Cas 2
85
-
Cas 3
65
50
Cas 2
11.07
- 7.15
Cas 3
35.63
14.13
15.33
Résultat
7 8 9 10 11 12 13 14 15 16 17 18 19 0
30
60
90
120
150
Pto
tal (k
W)
8 10 12 14 16 18 0.1
0.2
0.3
Prix d
’én
erg
ie (
E/k
Wh
)
Sans contrainte DSO
Avec contrainte DSO
Sans gestion PV Prix 7 8 9 10 11 12 13 14 15 16 17 18 19 -50
0
50
100
150
Time (H)
Pgrid
(kW
)
Opt sans DSO
Opt avec DSO Sans opt
Réussir à réduire le coût + limiter la puissance
Aléatoire 50 VE
Cas 1
Résultat d’optimisation, cas avec PV

page 18/49
Plan
1
Contribution des systèmes PV et
VE aux services système 1
Gestion optimale de recharge
des VE 2
Contrôle en temps réel des
systèmes PV et VE 3
Conclusions et perspectives 4

page 19/49
Contrôle en temps réel des systèmes VE
Transformateur
Ligne
Réseau
Borne de
recharge
Objectif: développement des stratégies de contrôles de recharge en temps réel des VE en parking:
Gérer les congestions afin de minimiser la puissance appelée au réseau
Maximiser l’utilisation de l’énergie PV pour recharger les véhicules
Pouvoir injecter une puissance au réseau
Hypothèse Recharge modulé
Limite des méthodes d’optimisation Besoin d’une connaissance précise: types de VE, SOC, temps d’arrivée, temps de départ…
Ne pas permettre pas de travailler en temps réel
Optimisation demande des efforts de calcul importants

page 20/49
Système de recharge d’un parking de VE
Module de liaison : entrée électrique du parking, mesure la puissance du
parking en temps réel
Gestionnaire du réseau : DSO ou TSO
Gestionnaire de la station : communication, recevoir le signal de puissance
du DSO et module de liaison, et envoyer Ps et Ps* à chaque VE
Réseau
P*S : puissance de référence
PS : puissance de mesure en temps réel
Tstop
SOC
VE1
VE2
VEn
Tstop
SOC
Tstop
SOC
Info locale de
chaque VE
Gestionnaire
de la station
Gestionnaire
du réseau
P*S
PS
PS et P*S
Module de
liaison
P*S
PS
SOC
Tdurée
Logique
floue
PVE
Bloc de
calcul

page 21/49
0 5 10 15 20 0
5
10
15
20
25
30
Time (h)
Pto
tale
(kW
)
0 5 10 15 20 0
10
20
30
40
50
60
Pto
ata
le (
kW
) Réduire le pic de consommation
Nombre de VE : 20 ; Pmax=3kW; Cmax=24 kWh ;
SOC initiale : aléatoire entre 40 et 60%
Puissance totale Puissance totale
Puissance des VE Puissance des VE
Diminuer le pic de puissance de consommation du parking de 60kW à 25kW
0 5 10 15 20 25 0 0.5 1
1.5 2
2.5 3
Time (h)
PV
E (
kW
)
0 5 10 15 20 25 0 0.5 1
1.5 2
2.5 3
Time (h)
PV
E (
kW
)
Sans nouveau contrôle Avec nouveau contrôle

page 22/49
Maximiser l’utilisation de la production PV
Puissance totale
Taux de couverture 55,62% 97,88%
Puissance des VE
6 8 10 12 14 16 18 20 22 0
0.5
1
1.5
2
2.5
3 3.5
Time (h)
PV
E (
kW
)
6 8 10 12 14 16 18 20 22 0 0.5 1
1.5 2
2.5
3 3.5
Time (h)
PV
E (
kW
) 6 8 10 12 14 16 18 20 22 0
10
20
30
40
50
60
Time (h) P
tota
le (
kW
)
6 8 10 12 14 16 18 20 22 0
10
20
30
40
50
60
Time (h)
Pto
tale
(k
W)
Sans nouveau contrôle Avec nouveau contrôle

page 23/49
V2G
Puissance totale Puissance des VE
Possibilité de recharger les VE, ou bien extraire l’énergie des
VE pour soutenir le réseau (V2G)
6 8 10 12 14 16 18 20 22 24 -3
-2
-1
0
1
2
3
Time (h)
PV
E (
kW
)
6 8 10 12 14 16 18 20 22 24 -20
-10
0
10
20
30
40
50
Time (h)
Pto
tale
(kW
)
consigne mesure
Consigne: de 9h à 11h le parking injecté une puissance 15 kW au réseau

page 24/49
Conclusions
Intégration des systèmes PV et VE au réseau de distribution
C
on
ten
ue
Service système Réglage de tension
Parking de recharge
Gestion optimale
Congestion
Utilisation EPV
Coût
Contrôle en temps réel
Congestion
Utilisation EPV
V2G