Embed Size (px)
Citation preview

CI8 Les systèmes automatiques asservis
CORRIGE TOUR A COMMANDE NUMERIQUE
Denis Guérin 1/12 TSI Eiffel Dijon
Problématique : Un correcteur proportionnel convient-il pour une machine-outil ?
Contexte Les dernières évolutions techniques se traduisent aujourd'hui par l'utilisation de moteurs autosynchrones (ou synchrones auto-pilotés) associés à des variateurs numériques. Le modèle retenu est toutefois celui du moteur à courant continu à excitation indépendante. Si ce modèle n'est qu'une approximation moyenne, il n'en est pas moins suffisant dans le cadre de l'étude réalisée ici. De plus, on se place dans l'hypothèse d'un modèle continu de systèmes linéaires, la commande numérique n'introduisant pas de différences significatives de comportement.
Comme déjà précisé, un tour à trois axes est caractérisé par la présence, au niveau de la broche, de deux asservissements, un en vitesse et un en position. On se propose dans cette partie d'étudier quelques aspects relatifs à chacun de ces asservissements, essentiellement :
- définition d'un modèle équivalent d'une motorisation électrique,
- limite d'utilisation d'un tel modèle pour l'étude du comportement de l'asservissement de vitesse,
- influence de la structure de l'asservissement de position sur la qualité des performances.
La modélisation de la motorisation est :
- équation de commande : 𝑢(𝑡) = 𝑅 𝑖(𝑡) + 𝐿 𝑑𝑖(𝑡)
𝑑𝑡 + 𝑒(𝑡)
- relation de couple moteur : 𝐶𝑚(𝑡) = 𝑘𝑐 . 𝑖(𝑡)
- relation de force contre-électromotrice : 𝑒(𝑡) = 𝑘𝑒 .𝛺𝑚(𝑡)
- équation mécanique : 𝐽.𝑑Ω
𝑑𝑡= 𝐶𝑚(𝑡) − 𝐶𝑟(𝑡)
R la résistance de l'induit, L l'inductance de l'induit, 𝐶𝑚(𝑡) le couple moteur, 𝐶𝑟(𝑡) le couple résistant dû aux actions
mécaniques pièce/outil, 𝛺𝑚(𝑡) la fréquence de rotation de la broche et J l'inertie globale ramenée sur l'arbre
moteur, du système broche = broche + moteur + mandrin + vérin de commande + pièce.
La cinématique d'entraînement est telle que la broche et le moteur tournent à la même vitesse.
Les valeurs numériques sont :
R = 0,28 Ω L = 0,25 mH J = 2,3 kg.m2 𝑘𝑒 .𝛺𝑚(𝑡) = 120 V/(1000 tr/min) 𝑘𝑐 = 1,146 Nm/A
Par convention, pour l'étude de la motorisation et de l'asservissement de vitesse, les fonctions de transfert relatives à l'étude des modèles du premier ordre sont notées avec une étoile "*".
Questions Modèle de la motorisation de la broche
Q1 Écrire la relation de transfert de la commande en vitesse de la motorisation sous la forme :
𝛺𝑚(𝑝) = 𝐹1(𝑝) 𝑈(𝑝) – 𝐹2(𝑝) 𝐶𝑟(𝑝) (sous forme normalisée du second ordre).
𝐽. 𝑝. 𝛺𝑚(𝑝) = 𝐶𝑚(𝑝) − 𝐶𝑟(𝑝) = 𝑘𝑐 . 𝐼(𝑝) − 𝐶𝑟(𝑝) = 𝑘𝑐 .𝑈(𝑝)−𝐸
𝑅+𝑝.𝐿− 𝐶𝑟(𝑝) = 𝑘𝑐 .
𝑈(𝑝)−𝑘𝑒.𝛺𝑚(𝑝)
𝑅+𝑝.𝐿− 𝐶𝑟(𝑝)
𝐽. 𝑝. (𝑅 + 𝑝. 𝐿). 𝛺𝑚(𝑝) = 𝑘𝑐 . (𝑈(𝑝) − 𝑘𝑒 .𝛺𝑚(𝑝) ) − (𝑅 + 𝑝. 𝐿). 𝐶𝑟(𝑝)
(𝑘𝑐 . 𝑘𝑒 + 𝐽. 𝑝. (𝑅 + 𝑝. 𝐿)). 𝛺𝑚(𝑝) = 𝑘𝑐 . 𝑈(𝑝) − (𝑅 + 𝑝. 𝐿). 𝐶𝑟(𝑝)
𝛺𝑚(𝑝) =𝑘𝑐
𝑘𝑐 . 𝑘𝑒 + 𝐽. 𝑝. (𝑅 + 𝑝. 𝐿). 𝑈(𝑝) −
(𝑅 + 𝑝. 𝐿)
𝑘𝑐 . 𝑘𝑒 + 𝐽. 𝑝. (𝑅 + 𝑝. 𝐿). 𝐶𝑟(𝑝)
𝛺𝑚(𝑝) =
𝑘𝑐𝑘𝑐. 𝑘𝑒
1 +𝑅𝐽𝑘𝑐. 𝑘𝑒
. 𝑝 +𝐿𝐽𝑘𝑐 . 𝑘𝑒
. 𝑝2. 𝑈(𝑝) −
(𝑅 + 𝑝. 𝐿)𝑘𝑐 . 𝑘𝑒
1 +𝑅𝐽𝑘𝑐. 𝑘𝑒
. 𝑝 +𝐿𝐽𝑘𝑐 . 𝑘𝑒
. 𝑝2. 𝐶𝑟(𝑝)
𝐹1(𝑝) =
1
𝑘𝑒
1+𝑅𝐽
𝑘𝑐.𝑘𝑒.𝑝+
𝐿𝐽
𝑘𝑐.𝑘𝑒.𝑝2
et 𝐹2(𝑝) =
(𝑅+𝑝.𝐿)
𝑘𝑐.𝑘𝑒
1+𝑅𝐽
𝑘𝑐.𝑘𝑒.𝑝+
𝐿𝐽
𝑘𝑐.𝑘𝑒.𝑝2
Q2 Faire l'application numérique.
𝐹1(𝑝) =
1
𝑘𝑒
1+𝑅𝐽
𝑘𝑐.𝑘𝑒.𝑝+
𝐿𝐽
𝑘𝑐.𝑘𝑒.𝑝2=
1
1.146
1+0.28∗2.3
0.1462.𝑝+
0.25𝑒−3∗2.3
0.1462.𝑝2=
0.873
1+0.873.𝑝+0.438.𝑝2 𝐹1(𝑝) =
0.873
1+0.873.𝑝+0.438.𝑝2

CI8 Les systèmes automatiques asservis
CORRIGE TOUR A COMMANDE NUMERIQUE
Denis Guérin 2/12 TSI Eiffel Dijon
𝐹2(𝑝) =
(𝑅 + 𝑝. 𝐿)𝑘𝑐 . 𝑘𝑒
1 +𝑅𝐽𝑘𝑐 . 𝑘𝑒
. 𝑝 +𝐿𝐽𝑘𝑐 . 𝑘𝑒
. 𝑝2=
0.28 + 25e − 6. 𝑝1.313
1+0.49.𝑝+0.438.𝑝2
Motorisation électrique Pour le modèle d'une motorisation électrique, on définit classiquement :
la constante de temps mécanique : 𝑇𝑚 =𝑅𝐽
𝑘𝑐.𝑘𝑒
la constante de temps électrique : 𝑇𝑒 =𝐿
R
Q3 Montrer que le dénominateur des fonctions 𝐹1(𝑝) et de 𝐹2(𝑝) peut s'écrit sous la forme:
(1 + 𝑇𝑚. 𝑝). (1 + 𝑇𝑒 . 𝑝) en formulant une hypothèse et en la vérifiant numériquement.
1 +𝑅𝐽
𝑘𝑐 . 𝑘𝑒. 𝑝 +
𝐿𝐽
𝑘𝑐 . 𝑘𝑒. 𝑝2 = 1 + 𝑇𝑚. 𝑝 + 𝑇𝑒 . 𝑇𝑝. 𝑝
2 = 1 + (𝑇𝑚 + 𝑇𝑒). 𝑝 + 𝑇𝑒 . 𝑇𝑝. 𝑝2 = (1 + 𝑇𝑚 . 𝑝). (1 + 𝑇𝑒 . 𝑝)
𝑠𝑖 𝑇𝑚 ≫ 𝑇𝑒 𝑇𝑚 =𝑅𝐽
𝑘𝑐.𝑘𝑒= 490ms 𝑇𝑒 =
𝐿
𝑅=25𝑒−5
0.28= 0,893𝑚𝑠
Q4 En déduire le modèle d’ordre 1 du moteur pour les deux fonctions de transfert 𝐹1(𝑝)∗ et 𝐹2(𝑝)
∗
𝐹1(𝑝)∗ =
1
𝑘𝑒
1+𝑅𝐽
𝑘𝑐.𝑘𝑒.𝑝
et 𝐹2(𝑝)∗ =
(𝑅+𝑝.𝐿)
𝑘𝑐.𝑘𝑒
1+𝑅𝐽
𝑘𝑐.𝑘𝑒.𝑝
Limite d'utilisation de la motorisation
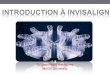
Figure 7 : Puissance du moteur
La figure représente la courbe limite d'utilisation du moteur en charge : puissance mécanique disponible en fonction de la vitesse de rotation de la broche. L'étude est réalisée en considérant la motorisation en régime permanent.
Q5 Donner l'expression de la vitesse de broche pour une tension de commande U donnée et un couple résistant Cr
constant (en régime permanent).
𝛺𝑚(𝑝) =
1𝑘𝑒
1 +𝑅𝐽𝑘𝑐. 𝑘𝑒
. 𝑝 +𝐿𝐽𝑘𝑐 . 𝑘𝑒
. 𝑝2. 𝑈(𝑝) −
(𝑅 + 𝑝. 𝐿)𝑘𝑐 . 𝑘𝑒
1 +𝑅𝐽𝑘𝑐. 𝑘𝑒
. 𝑝 +𝐿𝐽𝑘𝑐 . 𝑘𝑒
. 𝑝2. 𝐶𝑟(𝑝)
en régime permanent, (p=0)
𝛺𝑚 =1
𝑘𝑒. 𝑈 −
𝑅
𝑘𝑐 . 𝑘𝑒. 𝐶𝑟
Q6 Calculer la valeur de la chute de vitesse 𝛥𝛺𝑚 consécutive à une opération d'usinage avec un couple résistant
de 100 Nm.
ΔΩm = −𝑅
𝑘𝑐 . 𝑘𝑒. Δ𝐶𝑟 = −
0.28
1.1462. 100 = 21.32 𝑟𝑎𝑑. 𝑠−1 = 204 𝑟𝑝𝑚
Q7 Calculer la tension de commande ainsi que la puissance électrique consommée par le moteur pour les vitesses
850 tr/min et 5000 tr/min pour une utilisation limite du moteur.
Ωm1 = 850 𝑟𝑝𝑚 = 89 𝑟𝑑. 𝑠−1 Cm1 =𝑃𝑚𝑎𝑥
Ωm1=28𝑒3
89= 315 𝑁𝑚 = 𝑘𝑐 . 𝐼1 𝐼1 =
Cm1
𝑘𝑐=
315
1.146= 275𝐴

CI8 Les systèmes automatiques asservis
CORRIGE TOUR A COMMANDE NUMERIQUE
Denis Guérin 3/12 TSI Eiffel Dijon
𝑈1 = 𝑘𝑒 . 𝛺𝑚1 +𝑅
𝑘𝑐. 𝐶𝑟1 = 𝑘𝑒 . 𝛺𝑚1 +
𝑅
𝑘𝑐. 𝐶𝑚1 = 1.146 ∗ 89 +
0.28
1.146∗ 315 = 179 𝑉 (en régime permanent
𝐶𝑚1 = 𝐶𝑟1) 𝑃𝑒1 = 𝑈1 ∗ 𝐼1 = 179 ∗ 275 = 49.2 𝑘𝑊
Ωm2 = 5000 𝑟𝑝𝑚 = 523.6 𝑟𝑑. 𝑠−1 Cm2 =𝑃𝑚𝑎𝑥
Ωm2=28𝑒3
524= 53.4 𝑁𝑚 = 𝑘𝑐 . 𝐼2 𝐼2 =
Cm2
𝑘𝑐=
53.4
1.146= 46.6𝐴
𝑈2 = 𝑘𝑒 . 𝛺𝑚2 +𝑅
𝑘𝑐. 𝐶𝑟2 = 1.146 ∗ 523.6 +
0.28
1.146∗ 53.4 = 613 𝑉
𝑃𝑒2 = 𝑈2 ∗ 𝐼2 = 613 ∗ 46.6 = 28.57 𝑘𝑊 On observe que pour la même puissance utile 28 kW, la machine absorbe une puissance de 49 kW à 850 rpm et 29 kW à 5000rpm. La différence s’explique par les pertes joules dans l’induit à 850 rpm, 𝑃𝑗1 = 𝑅. 𝐼1
2 = 0.28 ∗ 2752 = 21 𝑘𝑊

CI8 Les systèmes automatiques asservis
CORRIGE TOUR A COMMANDE NUMERIQUE
Denis Guérin 4/12 TSI Eiffel Dijon
ASSERVISSEMENT DE VITESSE La structure de l'asservissement de vitesse est telle que :
- la tension de commande u(t) est proportionnelle à la fonction d'écart ε(t) : 𝑢(𝑡) = 𝐾𝑣 𝜀(𝑡)
- la mesure de vitesse est réalisée par un capteur modélisé par un gain pur 𝐾𝑅𝑉
- la consigne de vitesse est uref(t) = Kcons Ωref(t)
Kcons représente le gain d'adaptation de la consigne tel que Ωref(t) soit homogène à Ωm(t), c’est à dire tel que les
plages de variation de Ωm(t) et Ωref(t) soient idéalement identiques.
On en déduit le schéma fonctionnel de l'asservissement de vitesse de la broche :
Figure 8 : Asservissement de vitesse
Modèles de l'asservissement de vitesse
Q8 Déterminer l'expression de Ka qui permet d'aboutir au modèle équivalent à retour unitaire représenté figure 9.
𝐾𝑐𝑜𝑛𝑠 = 𝐾𝑅𝑉 permet d’adapter les signaux à l’entrée du comparateur et de ramener le schéma à un retour unitaire ave. 𝐾𝑎 = 𝐾𝑐𝑜𝑛𝑠 = 𝐾𝑅𝑉
Figure 9 : Asservissement de vitesse à retour unitaire
Q9 Donner l'expression de la fonction de transfert en boucle ouverte (FTBO) notée𝐹𝐵𝑂(𝑝) =𝛺𝑚(𝑝)
𝛺𝑟𝑒𝑓(𝑝), avec le modèle
de la motorisation du deuxième ordre 𝐹1(𝑝) (sous forme normalisée) et déterminer l’expression de KBO le
gain statique de 𝐹𝐵𝑂(𝑝).
𝐹𝐵𝑂(𝑝) =Ω𝑚(𝑝)
Ω𝑟𝑒𝑓(𝑝)= 𝐾𝑉 . 𝐹1(𝑝). 𝐾𝑅𝑉 =
𝐾𝑉.𝐾𝑅𝑉𝑘𝑒
1+𝑅𝐽
𝑘𝑐.𝑘𝑒.𝑝+
𝐿𝐽
𝑘𝑐.𝑘𝑒.𝑝2
𝐾𝐵𝑂 =𝐾𝑎.𝐾𝑉
𝑘𝑒
Réponse fréquentielle On admet pour cette question, que le modèle du deuxième ordre pour 𝐹1(𝑝) peut s'écrire sous la forme :
𝐹1(𝑝) =𝐾1
(1 + 𝑇𝑚. 𝑝). (1 + 𝑇𝑒 . 𝑝)
Q10 Montrer que 𝐹2(𝑝) peut s'écrire sous la forme : 𝐹2(𝑝) =𝑘𝑟𝑒𝑔
(1+𝑇𝑚.𝑝) avec 𝑘𝑟𝑒𝑔 =
𝑅
𝑘𝑐.𝑘𝑒 facteur de régulation si
le dénominateur est un second ordre séparable.
𝐹2(𝑝) =
(𝑅 + 𝑝. 𝐿)𝑘𝑐. 𝑘𝑒
1 +𝑅𝐽
𝑘𝑐. 𝑘𝑒. 𝑝 +
𝐿𝐽
𝑘𝑐. 𝑘𝑒. 𝑝2
=
𝑅
𝑘𝑐. 𝑘𝑒. (1 + 𝑝.
𝐿
𝑅)
(1 + 𝑇𝑚. 𝑝). (1 + 𝑇𝑒 . 𝑝)=
𝑅
𝑘𝑐. 𝑘𝑒. (1 + 𝑇𝑒 . 𝑝)
(1 + 𝑇𝑚. 𝑝). (1 + 𝑇𝑒 . 𝑝)=
𝑅
𝑘𝑐. 𝑘𝑒
(1 + 𝑇𝑚. 𝑝)

CI8 Les systèmes automatiques asservis
CORRIGE TOUR A COMMANDE NUMERIQUE
Denis Guérin 5/12 TSI Eiffel Dijon
Q11 Tracer le diagramme asymptotique de BODE correspondant à 𝐹𝐵𝑂(𝑝) ainsi que l'allure des courbes réelles de
module et de phase pour KBO = 20 et KBO = 100.
𝐹𝐵𝑂(𝑝) = 𝐾𝑎 . 𝐾𝑉 .𝐹1(𝑝) =𝐾𝐵𝑂
(1 + 𝑇𝑚 . 𝑝). (1 + 𝑇𝑒 . 𝑝)=
𝐾𝐵𝑂(1 + 0,490. 𝑝). (1 + 0,893. 10−3. 𝑝)
Dans l’espace complexe :
𝐹𝐵𝑂(𝑗𝜔) =𝐾𝐵𝑂
(1 + 𝑗𝜔𝜔𝑚) . (1 + 𝑗
𝜔𝜔𝑒)=
𝐾𝐵𝑂
(1 + 𝑗𝜔2,04
) . (1 + 𝑗𝜔1120
)
Caractérisation de l'asservissement de vitesse
Q12 Donner l'expression de la fonction de transfert de l'asservissement de vitesse sous la forme :
Ωm(p) = H1(p) Ωref(p) – H2(p) Cr(p)
𝜔𝑚 𝜔𝑒
Gain (dB)
ω (rad) 100
Phase (°)
-45
-135
-90
-180
26dB
40dB

CI8 Les systèmes automatiques asservis
CORRIGE TOUR A COMMANDE NUMERIQUE
Denis Guérin 6/12 TSI Eiffel Dijon
Ω𝑚(𝑝) = 𝐺𝑣(𝑝). (Ω𝑟𝑒𝑓 − Ω𝑚) − 𝐹2. 𝐶𝑟
Ω𝑚(𝑝). (1 + 𝐺𝑣(𝑝)) = 𝐺𝑣(𝑝). Ω𝑟𝑒𝑓 − 𝐹2. 𝐶𝑟
Ω𝑚(𝑝). =𝐺𝑣(𝑝)
(1 + 𝐺𝑣(𝑝)). Ω𝑟𝑒𝑓 −
𝐹2
(1 + 𝐺𝑣(𝑝)). 𝐶𝑟
Ω𝑚(𝑝) =
𝐾𝐵𝑂(1 + 𝑇𝑚. 𝑝). (1 + 𝑇𝑒 . 𝑝)
(1 +𝐾𝐵𝑂
(1 + 𝑇𝑚. 𝑝). (1 + 𝑇𝑒 . 𝑝))
. Ω𝑟𝑒𝑓 −
𝑘𝑟𝑒𝑔(1+𝑇𝑚. 𝑝)
(1 +𝐾𝐵𝑂
(1 + 𝑇𝑚. 𝑝). (1 + 𝑇𝑒 . 𝑝))
. 𝐶𝑟
Ω𝑚(𝑝) =𝐾𝐵𝑂
(1 + 𝑇𝑚. 𝑝). (1 + 𝑇𝑒 . 𝑝) +𝐾𝐵𝑂. Ω𝑟𝑒𝑓 −
𝑘𝑟𝑒𝑔. (1 + 𝑇𝑒 . 𝑝)
(1 + 𝑇𝑚. 𝑝). (1 + 𝑇𝑒 . 𝑝) +𝐾𝐵𝑂. 𝐶𝑟
Ω𝑚(𝑝) =𝐾𝐵𝑂
1 + 𝑇𝑚 . 𝑇𝑒 . 𝑝2 + (𝑇𝑚 + 𝑇𝑒). 𝑝 +𝐾𝐵𝑂
. Ω𝑟𝑒𝑓 −𝑘𝑟𝑒𝑔. (1 + 𝑇𝑒 . 𝑝)
1 + 𝑇𝑚 . 𝑇𝑒 . 𝑝2 + (𝑇𝑚 + 𝑇𝑒). 𝑝 +𝐾𝐵𝑂
. 𝐶𝑟
Ω𝑚(𝑝) =
𝐾𝐵𝑂1+𝐾𝐵𝑂
1 +(𝑇𝑚 + 𝑇𝑒)1+𝐾𝐵𝑂
. 𝑝 +𝑇𝑚. 𝑇𝑒1+𝐾𝐵𝑂
. 𝑝2. Ω𝑟𝑒𝑓 −
𝑘𝑟𝑒𝑔1+𝐾𝐵𝑂
(1 + 𝑇𝑒 . 𝑝)
1 +(𝑇𝑚 + 𝑇𝑒)1+𝐾𝐵𝑂
. 𝑝 +𝑇𝑚. 𝑇𝑒1+𝐾𝐵𝑂
. 𝑝2. 𝐶𝑟
H1(𝑝) =
𝐾𝐵𝑂1+𝐾𝐵𝑂
1+(𝑇𝑚+𝑇𝑒)
1+𝐾𝐵𝑂.𝑝+
𝑇𝑚.𝑇𝑒1+𝐾𝐵𝑂
.𝑝2 H2(𝑝) =
𝑘𝑟𝑒𝑔1+𝐾𝐵𝑂
(1+𝑇𝑒.𝑝)
1+(𝑇𝑚+𝑇𝑒)
1+𝐾𝐵𝑂.𝑝+
𝑇𝑚.𝑇𝑒1+𝐾𝐵𝑂
.𝑝2
On s’intéresse à la seule fonction de transfert H1(𝑝)
Q13 Exprimer le gain statique 𝐾𝐻1 de 𝐻1(𝑝) en fonction de 𝐾𝐵𝑂 .
𝐾𝐻1 =𝐾𝐵𝑂
1 + 𝐾𝐵𝑂
Q14 Exprimer la pulsation propre ωnH et le coefficient d'amortissement 𝜉H de H1(p) en fonction des constantes de
temps Tm et Te.
forme normalisée d’ordre 2 : 𝐾𝐻1
1+2.𝜉𝐻𝜔𝑛𝐻
.𝑝+1
𝜔𝑛𝐻2 .𝑝2
1
𝜔𝑛𝐻2 =
𝑇𝑚.𝑇𝑒
1+𝐾𝐵𝑂 𝜔𝑛𝐻 =
1
√𝑇𝑚.𝑇𝑒1+𝐾𝐵𝑂
= √1+𝐾𝐵𝑂
𝑇𝑚.𝑇𝑒
2.𝜉𝐻
𝜔𝑛𝐻=(𝑇𝑚+𝑇𝑒)
1+𝐾𝐵𝑂 𝜉𝐻 = 𝜔𝑛𝐻 .
(𝑇𝑚+𝑇𝑒)
1+𝐾𝐵𝑂= √
1+𝐾𝐵𝑂𝑇𝑚.𝑇𝑒
.(𝑇𝑚+𝑇𝑒)
1+𝐾𝐵𝑂=
(𝑇𝑚+𝑇𝑒)
√𝑇𝑚.𝑇𝑒.√1+𝐾𝐵𝑂 𝜉𝐻 =
𝑇𝑚+𝑇𝑒
√𝑇𝑚.𝑇𝑒.√1+𝐾𝐵𝑂
Q15 En déduire la condition portant sur KBO pour que l'on puisse adopter un modèle équivalent du premier ordre
pour l'asservissement de vitesse, en adoptant le critère de l’amortissement limite : 𝜉𝐻 ≥ 𝜉𝑜 = √5
Dans le cadre d’un modèle de premier ordre pour l’asservissement de vitesse, il faut considérer le moteur comme un premier ordre, c’est à dire 𝑇𝑚 ≫ 𝑇𝑒 (ce qui est vérifié).
L’expression de 𝜉𝐻 devient 𝑇𝑚+𝑇𝑒
√𝑇𝑚.𝑇𝑒.√1+𝐾𝐵𝑂≃
𝑇𝑚
√𝑇𝑚.𝑇𝑒.√1+𝐾𝐵𝑂=
1
√1+𝐾𝐵𝑂. √
𝑇𝑚
𝑇𝑒
1
√1+𝐾𝐵𝑂. √
𝑇𝑚
𝑇𝑒≥ 𝜉𝑜 √
𝑇𝑚
𝑇𝑒≥ √1 +𝐾𝐵𝑂. 𝜉𝑜
𝑇𝑚
𝑇𝑒≥ (1 +𝐾𝐵𝑂). 𝜉𝑜
2 1 + 𝐾𝐵𝑂 ≤𝑇𝑚
𝑇𝑒.𝜉𝑜2
donne une condition sur la valeur de 𝐾𝐵𝑂 𝐾𝐵𝑂 ≤𝑇𝑚
𝑇𝑒.𝜉𝑜2 − 1 =
0,49
0,893.10−3.5− 1 = 108,7
Si 𝐾𝐵𝑂 est inférieur à 108,7 le comportement en vitesse peut être considéré d’ordre 1.
On écrit H1(p) sous la forme : H1(𝑝) =𝐾𝐻1
1+𝑇1.𝑝+𝑇1 .𝑇2.𝑝2
Q16 Exprimer 𝑇1 et 𝑇2 en fonction de 𝑇𝑚 et 𝑇𝑒. et en déduire une relation entre 𝑇1 et 𝑇2.
H1(𝑝) =
𝐾𝐵𝑂1+𝐾𝐵𝑂
1+(𝑇𝑚+𝑇𝑒)
1+𝐾𝐵𝑂.𝑝+
𝑇𝑚.𝑇𝑒1+𝐾𝐵𝑂
.𝑝2 𝑇1 =
(𝑇𝑚+𝑇𝑒)
1+𝐾𝐵𝑂≃
𝑇𝑚
1+𝐾𝐵𝑂 𝑇2 =
𝑇𝑚.𝑇𝑒
1+𝐾𝐵𝑂= 𝑇𝑒 . 𝑇1
H1(𝑝) =𝐾𝐻1
1 + 𝑇1. 𝑝 + 𝑇1. 𝑇2. 𝑝2=
𝐾𝐻11 + 𝑇1. 𝑝 + 𝑇𝑒 . 𝑇1
2. 𝑝2=
𝐾𝐻1(1 + 𝑇1. 𝑝)(1 + 𝑇𝑒 . 𝑇1. 𝑝)

CI8 Les systèmes automatiques asservis
CORRIGE TOUR A COMMANDE NUMERIQUE
Denis Guérin 7/12 TSI Eiffel Dijon
Q17 En déduire l'expression des fonctions de transfert H1*(p) qui correspondent au modèle équivalent du premier
ordre pour l'asservissement de vitesse.
on peut écrire
H1(𝑝) =𝐾𝐻1
1 + 𝑇1. 𝑝 + 𝑇1. 𝑇2. 𝑝2=
𝐾𝐻1(1 + 𝑇1. 𝑝)(1 + 𝑇𝑒 . 𝑇1. 𝑝)
≃𝐾𝐻1
(1 + 𝑇1. 𝑝)
(dans le 2e terme, 𝑇1 est divisé par 1
𝑇𝑒= 1120)
ou bien, 2e solution
H1(𝑝) =𝐾𝐻1
1 + 𝑇1. 𝑝 + 𝑇1. 𝑇2. 𝑝2≃
𝐾𝐻11 + (𝑇1 + 𝑇2). 𝑝 + 𝑇1. 𝑇2. 𝑝
2=
𝐾𝐻1(1 + 𝑇1. 𝑝)(1 + 𝑇2. 𝑝)
≃𝐾𝐻1
(1 + 𝑇1. 𝑝)
H1(𝑝)∗ =
𝐾𝐻1(1+𝑇1.𝑝)
𝐾𝐻1 =𝐾𝐵𝑂
1+𝐾𝐵𝑂 𝑇1 =
𝑇𝑚
1+𝐾𝐵𝑂
Confrontation des modèles en boucle ouverte
Q18 Donner l'expression de la FTBO 𝐹𝐵𝑂(𝑝)∗ =
𝛺𝑚(𝑝)
𝛺𝑟𝑒𝑓(𝑝), avec le modèle équivalent du premier ordre pour la
motorisation.
𝐹𝐵𝑂(𝑝)∗ =
𝛺𝑚(𝑝)
𝛺𝑟𝑒𝑓(𝑝)= 𝐾𝑉 . 𝐹1(𝑝). 𝐾𝑅𝑉 =
𝐾𝐵𝑂
1 +𝑅𝐽𝑘𝑐 . 𝑘𝑒
. 𝑝
Q19 Tracer le diagramme asymptotique de BODE correspondant, ainsi que l'allure des courbes réelles pour les
mêmes valeurs de KBO = 20 et 100
𝐹𝐵𝑂(jω)∗ =
𝐾𝐵𝑂
1+𝑅𝐽
𝑘𝑐.𝑘𝑒.jω=
𝐾𝐵𝑂
1+jω
ω1
avec ω1 =𝑘𝑐.𝑘𝑒
𝑅𝐽= ω𝑚 = 2 𝑟𝑎𝑑. 𝑠
−1
𝜔1
Gain (dB)
ω (rad)
100

CI8 Les systèmes automatiques asservis
CORRIGE TOUR A COMMANDE NUMERIQUE
Denis Guérin 8/12 TSI Eiffel Dijon
Q20 Donner la valeur de la marge de phase pour chacun des deux modèles. Conclure.
modèle d’ordre 1 KBO = 20 marge de phase 90 °
modèle d’ordre 1 KBO = 100 marge de phase 90 °
modèle d’ordre 2 KBO = 20 marge de phase 90 °
modèle d’ordre 2 KBO = 100 marge de phase 80 °
Q21 Conclure sur le choix du modèle pour la fonction de transfert 𝐻1(𝑝).
On observe que la marge de phase du modèle d’ordre 2 décroit si on augmente la valeur du gain statique KBO, ce qui nous rapproche de l’instabilité. Le modèle d’ordre 1 ne rend pas compte de ce phénomène et un moteur à priori d’ordre 1, car les constantes de temps électriques et électromécaniques sont éloignées, peut dans une boucle d’asservissement se révéler instable si on ne prend pas garde à limiter le gain de boucle. La fonction de transfert en vitesse H1(𝑝) peut être considérée d’ordre 1 tant que le gain est inférieur à 109.
Précision statique
Q22 Donner l'expression de la fonction d'écart 𝜀(𝑝)en fonction de 𝛺𝑟𝑒𝑓(𝑝) et de 𝐹𝐵𝑂(𝑝)∗ .
𝜀(𝑝) = 𝛺𝑟𝑒𝑓(𝑝) − 𝛺𝑚(𝑝) = 𝛺𝑟𝑒𝑓(𝑝) − 𝐹𝐵𝑂(𝑝).∗ 𝜀(𝑝)
𝜀(𝑝). (1 + 𝐹𝐵𝑂(𝑝)∗ ) = 𝛺𝑟𝑒𝑓(𝑝)
𝜀(𝑝) =𝛺𝑟𝑒𝑓(𝑝)
1 + 𝐹𝐵𝑂(𝑝)∗
Q23 Déterminer l'erreur statique 𝜀𝑠1 pour une consigne en échelon 𝛺𝑟𝑒𝑓(𝑡) = 𝛺𝑜. 𝑢(𝑡) ( 𝑢(𝑡)=1 pour t>0
et 𝑢(𝑡) = 0 pour 𝑡 ≤ 0 )
𝜀𝑠1 = lim𝑡→∞
𝜀(𝑡) = lim𝑝→0
𝑝. 𝜀(𝑝) = lim𝑝→0
𝑝. (1
1 + 𝐹𝐵𝑂(𝑝)∗ . 𝛺𝑟𝑒𝑓(𝑝)) = lim
𝑝→0𝑝.
(
1
1 +𝐾𝐵𝑂
1 +𝑅𝐽𝑘𝑐 . 𝑘𝑒
. 𝑝
.𝛺𝑜𝑝
)
𝜀𝑠1 =𝛺𝑜
1 + 𝐾𝐵𝑂
Q24 Donner l'expression de la fonction d'écart 𝜀(𝑝)en fonction de 𝐶𝑟(𝑝), de 𝐹𝐵𝑂(𝑝)∗ et de 𝐹2(𝑝).
𝜀(𝑝) = 𝛺𝑟𝑒𝑓(𝑝) − 𝛺𝑚(𝑝) = 0 − (𝐹𝐵𝑂(𝑝)∗ 𝜀(𝑝) − 𝐹2(𝑝). Cr(p))
𝜀(𝑝). (1 + 𝐹𝐵𝑂(𝑝)∗ ) = 𝛺𝑟𝑒𝑓(𝑝) − 𝛺𝑚(𝑝) = 𝐹2(𝑝). Cr(p) =
𝑅𝑘𝑐. 𝑘𝑒
(1 + 𝑇𝑚. 𝑝). Cr(p)
Phase (°)
-45
-135
-90
-180
𝜔1

CI8 Les systèmes automatiques asservis
CORRIGE TOUR A COMMANDE NUMERIQUE
Denis Guérin 9/12 TSI Eiffel Dijon
𝜀(𝑝) =𝐹2(𝑝)
1+𝐹𝐵𝑂(𝑝)∗ . Cr(p) avec 𝐹2(𝑝) =
𝑅
𝑘𝑐.𝑘𝑒
(1+𝑇𝑚.𝑝)
Q25 Déterminer l'erreur statique 𝜀𝑠2 pour un couple résistant constant 𝐶𝑟(𝑡) = 𝐶𝑟𝑜. 𝑢(𝑡).
𝜀𝑠2 = lim𝑡→∞
𝜀(𝑡) = lim𝑝→0
𝑝. 𝜀(𝑝) = lim𝑝→0
𝑝. (𝐹2(𝑝)
1 + 𝐹𝐵𝑂(𝑝)∗ . Cr(p)) = lim
𝑝→0𝑝.
(
𝑅𝑘𝑐 . 𝑘𝑒
(1 + 𝑇𝑚. 𝑝)
1 +𝐾𝐵𝑂
1 +𝑅𝐽𝑘𝑐 . 𝑘𝑒
. 𝑝
.𝐶𝑟𝑜𝑝
)
𝜀𝑠2 =
𝑅𝑘𝑐.𝑘𝑒(1)
1+𝐾𝐵𝑂1
.𝐶𝑟𝑜
𝑝=
𝑅
𝑘𝑐.𝑘𝑒.𝐶𝑟𝑜
1+𝐾𝐵𝑂
𝜀𝑠2 =𝑅
𝑘𝑐. 𝑘𝑒.𝐶𝑟𝑜
1 + 𝐾𝐵𝑂
L’erreur statique due à une perturbation de couple résistant est « étouffée » par le facteur de régulation 𝑅
𝑘𝑐.𝑘𝑒= 0,186 et divisée par 1 + 𝐾𝐵𝑂
Q26 Calculer l’erreur statique totale(en pourcentage de la consigne) pour KBO = 20 Ω0 = 300 rad/ s et Cr0=90Nm
𝜀𝑠 = 𝜀𝑠1 + 𝜀𝑠2 =𝛺𝑜
1 + 𝐾𝐵𝑂+
𝑅
𝑘𝑐 . 𝑘𝑒.𝐶𝑟𝑜
1 + 𝐾𝐵𝑂=300
21+ 0,186.
90
21= 14,28 + 0,797 = 15 𝑟𝑎𝑑. 𝑠−1
L’erreur statique est de 15
300∗ 100 = 5 %
Correction On envisage d'intégrer dans la chaîne d'action, en aval du comparateur, un correcteur de fonction de transfert Cv(p) de la forme :
𝐶𝑣(𝑝) = 𝐾𝐶𝑉 (1 +1
𝑇𝑖 . 𝑝)
Q27 Tracer le diagramme asymptotique de BODE correspondant à la réponse fréquentielle du correcteur pour
KCV=10 et Ti = 10ms.
𝐶𝑣(𝑗𝜔) = 𝐾𝐶𝑉 (1 +1
𝑇𝑖 . 𝑗𝜔) = 𝐾𝐶𝑉 (
1 + 𝑗𝜔𝜔𝑖
𝑗𝜔𝜔𝑖
) = 10 (1 + 𝑗
𝜔100
𝑗𝜔100
)
Sur le tracé de Bode, on observe qu’un correcteur PI apporte du gain à basse fréquence, ce qui fait tendre l’erreur statique vers 0 mais injecte également de la phase ce qui peut étre déstabilisant pour le système.

CI8 Les systèmes automatiques asservis
CORRIGE TOUR A COMMANDE NUMERIQUE
Denis Guérin 10/12 TSI Eiffel Dijon
On suppose l'asservissement de vitesse dans la configuration modèle du second ordre pour la motorisation, c’est
à dire une fonction de transfert non corrigée HBO(p) =𝐾𝐵𝑂
(1+𝑇𝑚.𝑝).(1+𝑇𝑒.𝑝).
Q28 Montrer que pour une valeur de 𝜔𝑖 bien choisie la fonction de transfert boucle ouverte corrigée peut se
mettre sous la forme : 𝐻𝐵𝑂𝐶(𝑝) =𝐾𝐵𝑂𝐶
𝑝.(1+𝑇𝑐.𝑝).
Donner les expressions de 𝐾𝐵𝑂𝐶 et 𝑇𝑐 en fonction de 𝐾𝐶𝑉 𝑇𝑚, 𝑇𝑐 𝑒𝑡 𝐾𝐵𝑂 .
𝐻𝐵𝑂𝐶(𝑝) = 𝐶𝑣(𝑝). 𝐻𝐵𝑂(𝑝) = 𝐾𝐶𝑉 (1 +1
𝑇𝑖 . 𝑝)
𝐾𝐵𝑂(1 + 𝑇𝑚. 𝑝). (1 + 𝑇𝑒 . 𝑝)
= 𝐾𝐶𝑉 (1 + 𝑇𝑖 . 𝑝
𝑇𝑖 . 𝑝)
𝐾𝐵𝑂(1 + 𝑇𝑚. 𝑝). (1 + 𝑇𝑒 . 𝑝)
𝐻𝐵𝑂𝐶(𝑝) = 𝐾𝐶𝑉 (1
𝑇𝑖 . 𝑝)
𝐾𝐵𝑂(1 + 𝑇𝑒 . 𝑝)
=𝐾𝐵𝑂C
𝑝. (1 + 𝑇c. 𝑝)
𝑇𝑖 = 𝑇𝑚 𝐾𝐵𝑂C =𝐾𝐶𝑉.
𝐾𝐵𝑂
𝑇𝑖 𝑇c = 𝑇e
10dB
20dB
100 1000
1 + 𝑗𝜔
100
10
𝑗𝜔100
𝐶𝑣(𝑗𝜔)
10
𝑗𝜔100
1 + 𝑗𝜔
100
-180
-90

CI8 Les systèmes automatiques asservis
CORRIGE TOUR A COMMANDE NUMERIQUE
Denis Guérin 11/12 TSI Eiffel Dijon
ASSERVISSEMENT DE POSITION On considère pour la suite du problème que le modèle retenu pour la motorisation est du premier ordre.
Figure 10 : Asservissement de position
On envisage pour la réalisation de l'asservissement de position une structure telle que celle modélisée par le schéma fonctionnel donné figure 10. Le correcteur à action proportionnelle est défini par :
Cp(p) = KCP
On considère dans un premier temps que l'asservissement est réalisé sans boucle interne de vitesse. Les fonctions M1(p) et M2(p) s'expriment alors sous la forme :
𝑀1(𝑝) = 𝐹1(𝑝)∗ =
𝑘1
1+𝑇𝑚.𝑝 𝑀2(𝑝) = 𝐹2(𝑝)
∗ =𝑘2
1+𝑇𝑚.𝑝
avec K1 = 0,873 rad/s/V K2 = 0,21 rad/s/Nm Tm = 0,5 s
Q29 Déterminer l'expression de la fonction de transfert en boucle ouverte 𝐹𝐵𝑂(𝑝) =𝜃𝑚(𝑝)
𝜃𝑟𝑒𝑓(𝑝).
𝐹𝐵𝑂(𝑝) =𝜃𝑚𝜃𝑟𝑒𝑓
= 𝐶𝑝(𝑝). 𝑀1(𝑝).1
𝑝= 𝐾𝑐𝑝 .
𝐾𝑝. 𝐾1
1 + 𝑇𝑚. 𝑝.1
𝑝
Q30 Donner l'expression de la relation de transfert de l'asservissement de position sous la forme :
𝜃𝑚(𝑝) = 𝑄1(𝑝).𝜃𝑟𝑒𝑓(𝑝) − 𝑄2(𝑝).𝐶𝑟(𝑝)
Exprimer 𝑄1(𝑝) 𝑒𝑡 𝑄2(𝑝) sous forme normalisée.
𝑄1(𝑝) =𝜃𝑚𝜃𝑟𝑒𝑓
=𝐹𝐵𝑂(𝑝)
1 + 𝐹𝐵𝑂(𝑝)=
𝐾𝑐𝑝 . 𝐾11 + 𝑇𝑚. 𝑝
.1𝑝
1 +𝐾𝑐𝑝 . 𝐾11 + 𝑇𝑚. 𝑝
.1𝑝
=𝐾𝑐𝑝 . 𝐾𝑝. 𝐾1
(1 + 𝑇𝑚 . 𝑝). 𝑝 + 𝐾𝑐𝑝. 𝐾𝑝. 𝐾1=
𝐾𝑐𝑝. 𝐾11 + 𝐾𝑐𝑝 . 𝐾1
1 +1
1 + 𝐾𝑐𝑝 . 𝐾1. 𝑝 +
𝑇𝑚1 + 𝐾𝑐𝑝 . 𝐾1
. 𝑝2
𝑄1(𝑝) =𝜃𝑚𝜃𝑟𝑒𝑓
=
𝐾𝑐𝑝. 𝐾11 + 𝐾𝑐𝑝. 𝐾1
1 +1
1 + 𝐾𝑐𝑝 . 𝐾1. 𝑝 +
𝑇𝑚1 + 𝐾𝑐𝑝. 𝐾1
. 𝑝2
𝑄2(𝑝) = −𝜃𝑚(𝑝)
𝐶𝑟(𝑝)=?
𝜃𝑚(𝑝) =1
𝑝(𝐶𝑝(𝑝).𝑀1(𝑝). (0 − 𝜃𝑚(𝑝))−𝑀2(𝑝).𝐶𝑟(𝑝))
𝜃𝑚(𝑝). (1 +1
𝑝.𝐶𝑝(𝑝).𝑀1(𝑝)) = −
1
𝑝𝑀2(𝑝).𝐶𝑟(𝑝)
𝑄2(𝑝) = −𝜃𝑚(𝑝)
𝐶𝑟(𝑝)=
1𝑝𝑀2(𝑝)
1 +1𝑝.𝐶𝑝(𝑝).𝑀1(𝑝)
=𝑀2(𝑝)
𝑝 + 𝐶𝑝(𝑝).𝑀1(𝑝)=
𝐾21 + 𝑇𝑚. 𝑝
𝑝 +𝐾𝑐𝑝. 𝐾11 + 𝑇𝑚. 𝑝
=𝐾2.
(1 + 𝑇𝑚. 𝑝). 𝑝 +𝐾𝑐𝑝. 𝐾1
𝑄2(𝑝) = −𝜃𝑚(𝑝)
𝐶𝑟(𝑝)=
𝐾2(1 + 𝑇𝑚. 𝑝). 𝑝 + 𝐾𝑐𝑝 . 𝐾1
=
𝐾21 + 𝐾𝑐𝑝. 𝐾1
1 +1
1 + 𝐾𝑐𝑝. 𝐾1. 𝑝 +
𝑇𝑚1 + 𝐾𝑐𝑝. 𝐾1
. 𝑝2
𝑄2(𝑝) =
𝐾21 + 𝐾𝑐𝑝. 𝐾1
1 +1
1 + 𝐾𝑐𝑝 . 𝐾1. 𝑝 +
𝑇𝑚1 + 𝐾𝑐𝑝. 𝐾1
. 𝑝2
Q31 Rappeler la condition sur le coefficient d'amortissement d'un système du deuxième ordre pour que le
dépassement soit nul en réponse à une entrée en échelon. En déduire la limite de KCP correspondante .

CI8 Les systèmes automatiques asservis
CORRIGE TOUR A COMMANDE NUMERIQUE
Denis Guérin 12/12 TSI Eiffel Dijon
Le coefficient d’amortissement d’un SLCI modélisé par une fonction de transfert d’ordre 2 ne doit pas être inférieur à 1 pour que le dépassement soit nul.
𝜉 ≥ 1
2.𝜉
𝜔𝑛=
1
1+𝐾𝑐𝑝.𝐾1 et 𝜔𝑛 = √
1+𝐾𝑐𝑝.𝐾1
𝑇𝑚 soit 𝜉 =
1
2.
𝜔𝑛
1+𝐾𝑐𝑝.𝐾1=1
2.√1+𝐾𝑐𝑝.𝐾1
𝑇𝑚
1+𝐾𝑐𝑝.𝐾1=
1
2.√𝑇𝑚.(1+𝐾𝑐𝑝.𝐾1)
𝜉 ≥ 1 alors 1
2.√𝑇𝑚.(1+𝐾𝑐𝑝.𝐾1)≥ 1 soit 2.√𝑇𝑚 . (1 + 𝐾𝑐𝑝 . 𝐾1) ≤ 1
𝑇𝑚. (1 + 𝐾𝑐𝑝 . 𝐾1) ≤ ±1
4 soit 𝐾𝑐𝑝 ≤ ±
1
𝐾1. (
1
4.𝑇𝑚− 1)
𝐾𝑐𝑝 ≤ ±1
0,873. (
1
4.0,5− 1) = 2,29
Raideur asservie On se propose d'étudier l'influence sur la position angulaire de la broche d'une variation de couple résistant en considérant deux structures de la chaîne d'action de l'asservissement de position. On définit la raideur de l'asservissement de position raθ par le rapport d'une variation de couple ΔCr, supposée constante, à l'écart de
position permanent qu'elle engendre Δ𝜃 : 𝑟𝑎𝜃 =Δ𝐶𝑟
Δ𝜃
Q32 Déterminer, en régime permanent, c’est à dire position angulaire atteinte, l'expression de la raideur asservie
en fonction de KCP.
𝑄2(𝑝) = −𝜃𝑚(𝑝)
𝐶𝑟(𝑝) soit 𝜃𝑚(𝑝) = −𝑄2(𝑝). 𝐶𝑟(𝑝)
en régime permanent , Δ𝜃 = lim𝑡→∞ 𝜃𝑚(𝑡) sur une entrée 𝐶𝑟(𝑝) =Δ𝐶𝑟𝑝
Δ𝜃 = lim𝑡→∞
𝜃𝑚(𝑡) = lim𝑝→0
𝑝. 𝜃𝑚(𝑝) = lim𝑝→0
(−𝑝. 𝑄2(𝑝). 𝐶𝑟(𝑝)) = lim𝑝→0
−𝑝. 𝑄2(𝑝).
Δ𝐶𝑟𝑝= lim𝑝→0
−𝑝. 𝑄2(𝑝).
Δ𝐶𝑟𝑝
Δ𝜃 = lim𝑝→0
𝑝.
𝐾21 + 𝐾𝑐𝑝. 𝐾1
1 +1
1 + 𝐾𝑐𝑝. 𝐾1. 𝑝 +
𝑇𝑚1 + 𝐾𝑐𝑝. 𝐾1
. 𝑝2.Δ𝐶𝑟𝑝=
𝐾21 + 𝐾𝑐𝑝. 𝐾1
. Δ𝐶𝑟
𝑟𝑎𝜃 =Δ𝐶𝑟Δ𝜃
=1 + 𝐾𝑐𝑝. 𝐾1
𝐾2
Q33 En déduire la valeur minimale du produit KCP pour limiter la valeur maximale d'un défaut d'usinage de 6.10-3
rad pour ΔCr = 20 Nm.
𝑟𝑎𝜃 =Δ𝐶𝑟Δ𝜃
≥20
6. 10−3= 333
1 + 𝐾𝑐𝑝. 𝐾1
𝐾2≥ 333
333. 𝐾2 ≤ 1 + 𝐾𝑐𝑝. 𝐾1 (333.𝐾2−1)
𝐾1≤ 𝐾𝑐𝑝 𝐾𝑐𝑝 ≥
333.𝐾2−1
𝐾1
𝐾𝑐𝑝 ≥333.0,21 − 1
0,873= 79
Q34 Déduire de la condition de dépassement indiciel nul, la limite admissible pour la raideur asservie. Comparer les
résultats obtenus pour les deux conditions de réglage. Conclure
On observe que les réglages de Kcp sont contradictoires. On ne peut pas assurer un dépassement nul tout en garantissant une raideur suffisante. Sur une machine d’usinage, il ne saurait être question de dépassement, la raideur obtenue pour Kcp=2,3 est 143
ce qui donne une erreur de positionnement de 20
143= 140. 10−3 𝑟𝑎𝑑.
Le correcteur proportionnel ne convient pas car il ne permet pas de trouver un compromis entre la précision et la contrainte d’amortissement.