Embed Size (px)
Citation preview

Cours #13 Localisation
Découvertes8- Localisation8.1 Stéréoscopie8.2 Gradient d’éclairement8.3 Méthodes actives8.4 Modèles de
représentation

Cours #13 - 2SYS-844Hiver 2005
Forum

Cours #13 - 3SYS-844Hiver 2005
Découvertes
Bennamoun & Mamic, Object Recognition, Springer, 2002.
Stéréoscopie Représentations des objets Reconnaissance par parties Systèmes de reconnaissance 3D

Cours #13 - 4SYS-844Hiver 2005
Objectifs d’un système de vision numérique
Identifier Localiser

Cours #13 - 5SYS-844Hiver 2005
Chapitre 8Localisation
Méthodes passives Stéréoscopique Gradient d’éclairement
Méthodes actives Triangulation active Temps de vol Éclairage structuré
Modèles de représentation Volumétrique Surfacique

Cours #13 - 6SYS-844Hiver 2005
Méthodes passives
Utilisent seulement l’éclairage ambient S’apparentent à la vision humaine La vision humaine utilise une combinaison
des facteurs suivants pour percevoir les trois dimensions:
stéréoscopie modification de la longueur focale de l’œil gradient d’éclairement effet de perspective occlusions effet de parallaxe

Cours #13 - 7SYS-844Hiver 2005
8.1 Stéréoscopie
Illustration: viser le pouce Mise en correspondance
Appariement de primitives Intercorrélation
Reconstruction Carte de disparités

Un exemple

Cours #13 - 9SYS-844Hiver 2005
Principe: Un point dans une image est
associé à une droite (projecteur) dans l’espace.
Si on a deux images, le croisement des projecteurs nous donne le point dans l’espace.

Cours #13 - 10SYS-844Hiver 2005
Appariement
Problématique : Pairage: comment établir qu’un point de
l’image A et un point de l’image B correspondent au même point physique?
IntercorrélationPour chaque point de l’image A, on recherche un point de l’image B sur la même ligne pour lequel la comparaison des voisinages nous donne la meilleure ressemblance.
Appariement de primitivesPour limiter le temps de calcul, on peut faire une détection d’arêtes, et faire le pairage seulement vis-à-vis ces points.

Appariement par intercorrélation

Appariement de primitives

Appariement de primitives: exemple de recherche

Cours #13 - 14SYS-844Hiver 2005
Géométrie épipolaire

Cours #13 - 15SYS-844Hiver 2005
Rectification des images

Rectification des images: exemple

Cours #13 - 17SYS-844Hiver 2005
8.2 Gradient d’éclairement
Principe: Utilise les variations de
l’éclairement lumineux pour déduire le relief.
Hypothèses simplificatrices: pas de discontinuité de surface, surface matte.
Donne une profondeur relative

Cours #13 - 18SYS-844Hiver 2005
Trois photos de Mars prises par le satellite Viking Lander I.
Les 3 photos ont été prises en 1977, à 3 éclairages différents.

Cours #13 - 19SYS-844Hiver 2005
L’apparence d’un objet dépend grandement de son attitude dans l’espace par rapport à l’observateur.

Cours #13 - 20SYS-844Hiver 2005
Géométrie de la formation d’image
L
I
O
n
Z
X
Y
f Z

Cours #13 - 21SYS-844Hiver 2005
Équation de formation de l’image
E 4
df
2
cos4 L

Cours #13 - 22SYS-844Hiver 2005
Surface lambertienneSurface parfaitement diffusante qui émet ou réfléchit un flux lumineux tel que:
L = cte direction
L LS cos
Ls
n

i
n
Ls
s
Plan image
L
Formation des images pour des surfaces lambertiennes.Éclairement sur le plan ima ge en fonction de la normale à lasurface et la direction de la source lumineuse.
L

Cours #13 - 24SYS-844Hiver 2005
Espace de gradients
q
p
q
p
P1
P4
P5
P2
P3
P1
P2 P3P1
P4
P5
tan
y
x
qy
z=
px
z=

Cours #13 - 25SYS-844Hiver 2005
Calcul du gradient local à la surfaced’un objet 3D

Exemple de carte de réflectance Eimage =R(p,q)
Niveaux de gris Contours

Cours #13 - 27SYS-844Hiver 2005

Cours #13 - 28SYS-844Hiver 2005
L’équation de formation des images devient:
EI df
2
cos4 Eo
4cos i
Eimage R p,q cosi 1 pps qqs
1 ps2 qs
2 1 p2 q2

Cours #13 - 30SYS-844Hiver 2005
Reconstruction 3D à partir du gradient d’éclairement
z px qy
p rx sy
q sx ty
p
q
H
x
y
avec la matrice Hessian :
H =r s
s t
Ex rRp sRq
Ey sRp tRq
E x
Ey
H
Rp
Rq

Cours #13 - 31SYS-844Hiver 2005
Équations différentielles
p q p q
x y
x R y R z pR qR
p E q E


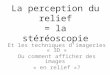
Figure 11-7. The shape-from-shading method is applied here to the recovery of the shape of a nose. The first picture shows the (crudely quantized) gray-level image available to the program. The second picture shows the base characteristics superimposed, while the third shows a contour map computed from the elevations found along the characteristic curves.

Cours #13 - 34SYS-844Hiver 2005
8.3 Méthodes actives
Nécessitent une émission additionnelle d’énergie.
Permettent une mesure absolue de la profondeur.

Cours #13 - 35SYS-844Hiver 2005
Triangulation active Principe:
On balaie une surface avec un point laser. La source laser est situé à un certaine
distance du capteur. La position de l’image du point dépend de la
profondeur

Cours #13 - 36SYS-844Hiver 2005

Cours #13 - 37SYS-844Hiver 2005

Cours #13 - 38SYS-844Hiver 2005
Triangulation active
Précision: dépend de la distance entre le
laser et la caméra (baseline) pour un même baseline la
précision diminue avec la distance. Problème:
réflections spéculaires effet d’ombrage.

Cours #13 - 39SYS-844Hiver 2005
Triangulation active
On peut aussi projeter une ligne laser au lieu d’un point.

Cours #13 - 40SYS-844Hiver 2005
Temps de vol
Principe: On envoie un signal (sonore, radio,
laser) vers l’objet et on mesure la distance par le temps mis par l’écho à revenir.
Utilisé pour de grandes distances car la lumière voyage vite (3.33 ns pour franchir 1 m)
Sonar: utilise une onde sonore. Vitesse plus lente, résolution spatiale faible

Cours #13 - 41SYS-844Hiver 2005
Déphasage

Cours #13 - 42SYS-844Hiver 2005
Déphasage
Principe: Un laser modulé en amplitude est projeté
sur l’objet. On mesure le déphasage entre l’onde
émise et l’onde reçue. La distance est égale à N fois la longueur
d’onde plus le déphasage où N est inconnue
Pour lever l’ambiguïté, on prend plusieurs mesures en variant la fréquence de modulation.
La distance n’affecte pas la précision.

Éclairage structuré Principe:
On projette une structure de lumière sur l’objet
On peut déterminer la distance par triangulation

Cours #13 - 44SYS-844Hiver 2005
8.4 Modèles de représentation Une image 3D peut être considérée
comme la numérisation d’une fonction
z = f(x,y) où z est la distance entre le point de
vue et la première surface rencontrée.
Par contre, cette définition n’est pas suffisante pour décrire une scène.
On a besoin d’un modèle.

Cours #13 - 45SYS-844Hiver 2005
Modèle volumétrique
Dans ce type de modèle, la scène est décrite comme une fonction d’occupation de l’espace f(x, y, z)
e.g. subdivision régulière de la scène en N x M x L petits éléments de volume (voxels)
e.g. Octree (arbre octaire): subdivision récursive de l’espace
Avantage: la détermination de l’occupation de l’espace est immédiate.
Application: détection de collision Inconvénient: peu de précision vs quantité
de données

Cours #13 - 46SYS-844Hiver 2005
Modèle surfacique
Dans ce type de modèle, la scène est décrite en terme de surfaces qui délimitent l’espace occupé de l’espace libre.
Les surfaces peuvent être décrites par un ensemble de triangles ou de splines cubiques (NURBS)e.g. OpenGL, VRML
Avantages: représentation précise des surfaces, possibilité d’ajouter de la texture.
Applications: CAO, réalité virtuelle Inconvénient: construction à partir d’images 3D
et intégration des vues plus difficiles.